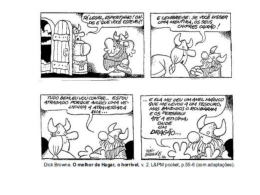
Resolução de Sistemas Lineares- Parte 1 • Exemplo 1: Problema da treliça • Treliça: estrutura composta de barras (metálicas ou de madeira) unidas por rótulas (nós) nas suas extremidades. • Determinar as componentes horizontal e vertical das forças que atuam nas junções da treliça. 2 1 1 Fh 5 3 2 4 4 7 6 3 9 6 11 10 5 F1 8 F2 8 12 13 16 15 17 14 7 9 F3 10 Fh • Forças que atuam na treliça: 17 • O número de junções (j) está relacionado com o número de componentes da treliça (m): 2j-3 = m Neste caso: 2 (10) – 3 = 17 • Logo, as componentes das forças são determinadas pelas condições de equilíbrio nas junções. • Condições de equilíbrio: • Junção 2: Fx f1 cos 45 f 4 f5 cos 45 0 a a Fx a f1 f 4 a f5 0 Fy a f1 f3 a f5 0 • Junção 3: Fx f 2 f 6 0 Fy f 3 F1 0 • Junção 4: Fx f 4 f 8 0 Fy F7 0 • Junção 5: Fx a f 5 f 6 a f 9 f 10 0 Fy a f 5 f 7 af9 F2 0 • Junção 6: Fx f 8 a f 9 f12 a f13 0 Fy a f 9 f11 a f13 0 • Junção 7: • Junção 8: • Junção 9: • Junção 10: Fx f 10 f 14 0 Fy F11 0 Fx f12 a f16 0 Fy a f15 af16 0 Fx a f 13 f 14 f 17 0 Fy a f 13 f 15 f 10 0 Fx a f16 f17 0 Junção 10: Junção 1: F x F x a f16 f17 Fh a f1 f 2 Fh Sistema linear com 17 variáveis ( f1 , f 2 , f 3 ,..., f17 ) e 17 equações Um sistema linear com m equações e n incógnitas pode ser escrito na forma: a11 x1 a12 x 2 ... a1n x n b1 a x a x ... a x b 21 1 22 2 2n 2 2 a m1 x1 a m 2 x 2 ... a mn x n bn coeficientes a mn constantes bn variáveis xn Resolver o sistema linear Calcular os valores de x j ( j 1, 2, ...,n) , caso existam, que satisfaçam as m equações. • Notação matricial: onde a11 a 21 A a m1 AX B a12 a 22 am2 é a matriz dos coeficientes. a1n a2n a mn x1 x2 X x n é o vetor das variáveis b1 b2 B b n é o vetor dos termos independentes • Consideremos a situação de duas equações e de duas variáveis 2 x1 x 2 3 x1 3 x 2 2 2 x1 x 2 3 4 x1 2 x 2 6 2 x1 x 2 3 4 x1 2 x 2 2 1 x 1 solução única retas concorrentes infinitas soluções retas coincidentes nenhuma solução retas paralelas x 3 2 Comentário 1: no caso geral de m equações e n variáveis também temos estas três situações: solução única, infinitas soluções e nenhuma solução. Notação: x solução exata x solução aproximada RESOLUÇÃO DE SISTEMAS LINEARES nxn Métodos Diretos: fornecem solução exata, a menos de arredondamentos e caso exista, após um número finito de operações.] Métodos Iterativos: geram uma seqüência de vetores xk , dada aproximação inicial x 0 , que converge para solução x , caso exista. MÉTODOS DIRETOS Método de Cramer pertence a esta classe. Ax b A1 Ax A1b x A1b onde A1 é a inversa de A • Para calcular o determinante de um sistema 20x20 temos 21x20!x19 multiplicações, mais este número de adições. • Um computador de 1GHz (109 operações por segundo) levaria 3X104 anos para calcular a solução deste sistema • Necessitamos de métodos mais eficientes!!! MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS • O Método da Eliminação de Gauss consiste em transformar o sistema linear original num sistema linear equivalente com matriz dos coeficientes triangular superior. Sistemas equivalentes têm a mesma solução. Sistema linear triangular tem solução imediata. MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS Teorema 1: Seja Ax b um sistema linear. Aplicando sobre as equações deste uma seqüência de operações elementares escolhidas entre: a) trocar a ordem das equações, b) multiplicar uma equação por constante, c) adicionar um multiplo de uma equação a outra; ~ ~ obtemos um novo sistema Ax b equivalente. MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS • Suponha Det A 0 . A eliminação e efetuada por colunas. • O elemento a11 é denominado pivô na primeira etapa. O elemento a 22 é o pivô da segunda etapa. O processo repete-se até termos um sistema linear triangular. • Os elementos mi1 a1i a11 são os multiplicadores da primeira etapa. Para gerar os zeros da coluna 1 linha i, faça Li Li mi1 L1 na linha i. Repita o procso para a coluna 2. MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS Exemplo: seja o sistema linear 3x1 2 x 2 4 x3 1 x1 x 2 2 x3 2 4 x1 3x 2 2 x3 3 m21 1 4 , m31 3 3 L2 L2 m21 L1 L3 L3 m31 L1 3x1 2 x 2 4 x3 1 m32 1/ 3 1 1/ 3 1 / 3x 2 2 / 3x3 5 / 3 24 / 3x3 0 3x1 2 x 2 4 x3 1 1 / 3x 2 2 / 3x3 5 / 3 1 / 3x 2 22 / 3x3 5 / 3 3 x 5 0 MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS Problema: Pivô nulo ou próximo de zero!!!! Estratégia de pivoteamento parcial • No início de cada eliminação de Gauss, trocando as linhas, escolher para o pivô o maior a ij da coluna j. MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS Estratégia de pivoteamento total • No início de cada eliminação de Gauss, escolher para o pivô o maior a ij entre todos elementos que atuam no processo de eliminação. • Problema: Muitas operações de comparação!! MÉTODOS DIRETOS ELIMINAÇÃO DE GAUSS Pivoteamento Parcial X Pivoteamento total 3 x1 2 x 2 1x3 x 4 5 0 x1 1x 2 0 x3 3 x 4 6 0 x1 3 x 2 5 x3 7 x 4 7 0 x1 2 x 2 4 x3 0 x 4 15 3 x1 2 x 2 1x3 x 4 5 0 x1 1x 2 0 x3 3 x 4 6 0 x1 3 x 2 5 x3 7 x 4 7 0 x1 2 x 2 4 x3 0 x 4 15 parcial 3 x1 2 x 2 1x3 x 4 5 0 x1 3 x 2 5 x3 7 x 4 7 continuar 0 x1 1x 2 0 x3 3 x 4 6 0 x1 2 x 2 4 x3 0 x 4 15 total 3 x1 x 4 1x3 2 x 2 5 0 x1 7 x 4 5 x3 3 x 2 7 0 x1 3 x 4 0 x3 1x 2 6 0 x1 0 x 4 4 x3 2 x 2 15 continuar MÉTODOS DIRETOS FATORAÇÃO LU Seja o sistema linear A x b . Este processo de fatoração consiste em decompor a matriz A em Um produto de dois ou mais fatores. Exemplo: Seja A C D , então resolver A x b É equivalente a resolver C y b e depois Dx y . MÉTODOS DIRETOS FATORAÇÃO LU Na fatoração A L U a matriz L é triangular inferior com diagonal unitária e a matriz U é triangular superior. MÉTODOS DIRETOS FATORAÇÃO LU Teorema da fatoração LU Dada uma matriz quadrada nxn. Se Det A 0 então existe uma única matriz triangular inferior L mij , com diagonal principal unitária, e uma única matriz triangular superior U uij , tais que L U A n u ii , e det A i 0 MÉTODOS DIRETOS FATORAÇÃO LU Exemplo de fatoração LU. Considere 3x1 2 x 2 4 x3 1 x1 x 2 2 x3 2 4 x1 3x 2 2 x3 3 onde 3 2 4 A 1 1 2 4 3 2 Do método de Gauss sem pivoteamento: FATORAÇÃO LU 3 2 4 A 1 1 2 4 3 2 4 3 2 0 1/ 3 2 / 3 0 1 / 3 10 / 3 2 4 3 1/ 3 1/ 3 2 / 3 4 / 3 1 / 3 10 / 3 No último passo foi acrescentados os multiplicadores mij Os multiplicadores são definidos como segue: da equação (linha) j subtraímos a equação (linha) i multiplicada por mij , de modo a escalonar a matriz A Continuando o processo: FATORAÇÃO LU 3 2 4 A 1 1 2 4 3 2 2 4 3 1/ 3 1/ 3 2 / 3 4 / 3 1 / 3 10 / 3 2 4 3 1 / 3 1 / 3 2 / 3 4 / 3 1 4 Assim, as matrizes L e U são 1 0 0 L 1/ 3 1 0 4 / 3 1 1 4 3 2 U 0 1 / 3 2 / 3 0 0 4 LU A FATORAÇÃO LU Resolvendo o sistema A x b por fatoração LU: 3x1 2 x 2 4 x3 1 x1 x 2 2 x3 2 4 x1 3x 2 2 x3 3 L yb y1 1 1 / 3 y1 y 2 2 4 / 3 y1 y 2 y 3 3 Continuando U x y 3x1 2 x 2 4 x3 1 1 / 3 x 2 2 / 3 x3 5 / 3 4 x3 0 3 x 5 0 1 y 5 / 3 0 FATORAÇÃO LU + PIVOTEAMENTO Fatoração LU com pivoteamento parcial. Fatoração LU com pivoteamento total. O pivoteamento pode ser implementado por meio da matriz de permutação. Definição: Uma matriz quadrada de ordem n é uma matriz de permutação se pode ser obtida da matriz identidade de ordem n permutando-se suas linhas (ou colunas). FATORAÇÃO LU + PIVOTEAMENTO 0 1 0 Exemplo de matriz permutação P 0 0 1 1 0 0 3 1 4 Seja A 1 5 9 2 6 5 0 1 0 3 1 4 1 5 9 Note: P A 0 0 1 1 5 9 2 6 5 1 0 0 2 6 5 3 1 4 FATORAÇÃO DE CHOLESKY Definição: Uma matriz quadrada A de ordem n é T n x A x 0 x definida positiva se . Definição: A fatoração de Cholesky de uma matriz A, simétrica positiva, é dada por A G GT onde G : n n , com G uma matriz triangular inferior com elementos da diagonal estritamente positivos. FATORAÇÃO DE CHOLESKY Do teorema LU, temos A L D U , onde D é uma matriz diagonal de ordem n. Ainda, se A for simétrica, então U LT e a fatoração escreve-se como: A L D LT L DD LT Portanto, G L D onde dii d ii FATORAÇÃO DE CHOLESKY Considere a matriz 16 4 12 4 4 2 1 1 A 12 1 14 2 4 1 2 83 Calculando os fatores L U 0 16 4 12 4 1 4 2 1 1 1/ 4 1 A 12 1 14 2 3 / 4 2 4 1 2 83 1 / 4 0 0 0 1 1 0 16 4 12 4 0 0 1 2 0 0 0 0 1 1 1 0 0 0 81 FATORAÇÃO DE CHOLESKY Calculando os fatores L D e L D U 0 16 4 12 4 1 4 2 1 1 1/ 4 1 A 12 1 14 2 3 / 4 2 4 1 2 83 1 / 4 0 0 1 1/ 4 1 A 3/ 4 2 1/ 4 0 0 0 1 1 0 16 0 0 0 0 1 0 0 1 0 0 0 0 1 1 0 16 4 12 4 0 0 1 2 0 LU 0 0 0 1 1 1 0 0 0 81 0 0 1 1/ 4 3 / 4 1/ 4 0 0 0 1 2 0 L D LT 1 0 0 0 1 1 0 81 0 0 0 1 FATORAÇÃO DE CHOLESKY Enfim, 0 1 1/ 4 1 A 3/ 4 2 1/ 4 0 0 0 1 1 0 4 0 0 0 0 1 0 0 1 0 0 0 0 1 0 0 4 0 0 0 0 9 0 0 1 0 0 0 0 1 0 0 1 1/ 4 3 / 4 1/ 4 0 0 1 2 0 L D D LT 0 0 0 1 1 9 0 0 0 1 Ou ainda, 4 1 A 3 1 0 1 2 0 0 0 1 1 0 4 1 0 0 1 0 0 0 9 0 0 3 1 2 0 G GT 1 1 0 9 FATORAÇÃO DE CHOLESKY Teorema da Fatoração de Cholesky Se A é uma matriz simétrica positiva definida, então existe uma única matriz triangular inferior G com diagonal estritamente positiva, tal que AGG T FATORAÇÃO DE CHOLESKY Resolução de sistemas lineares é semelhante T ao método LU. Seja A G G , então resolver A x b é equivalente a resolver G y b e depois G T x y . COMPARAÇÃO DOS MÉTODOS Fatoração de Cholesky: Primeiro verificar se uma matriz simétrica é definida positiva. Em caso positivo, continuar com o método de Cholesky. O método de Cholesky requer aproximadamente a metade das operações necessárias para a fatoração LU, da ordem de n3/6 operações.
Download