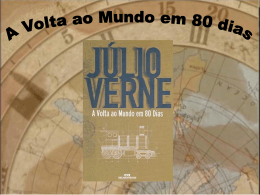
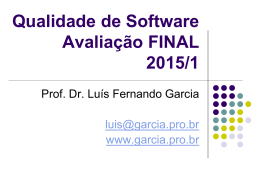
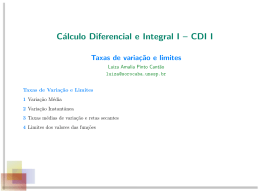
8. Estabilidade e bifurcação Os sistemas dinâmicos podem apresentar pontos fixos, isto é, pontos no espaço de fase onde o sistema permanece sempre no mesmo estado. Para identificar os pontos fixos e estudar o comportamento dos sistemas dinâmicos na vizinhança dos pontos fixos, vamos começar por estudar sistemas mecânicos simples em equilı́brio estático. Um primeiro sistema simples, já estudado por Euler no século XVIII, é uma barra flexı́vel, por exemplo uma régua plástica, que suporta um peso P . Se P não ultrapassar um valor crı́tico Pc , a barra permanece directa e em equilı́brio. Se o peso P ultrapassar o valor crı́tico Pc , a régua encurva-se, até ficar numa nova posição de equilı́brio em que o centro da régua está afastado uma distância ∆x da vertical. Acontece que o desvı́o da barra pode ser para a direita ou para a esquerda da vertical. Nomeadamente, existem dois pontos de equilı́brio com ∆x positiva ou negativa. Em função de P , o ponto de equilı́brio ∆x = 0, para P < Pc , separa-se em dois pontos de equilı́brio, ∆x > 0 e ∆x < 0, para P > Pc . Este fenómeno é designado de bifurcação. 8.1 Teoria linear da estabilidade Outro sistema mecânico que apresenta o fenómeno de bifurcação do ponto de equilı́brio, que vamos estudar com maior pormenor, consiste num pêndulo simples ligado a uma mola elástica (figura 8.1). Um objecto de massa m está pendurado de uma barra rı́gida, de comprimento l, com massa desprezável. O pêndulo pode descrever um cı́rculo completo de raio l. Uma mola elástica, de comprimento normal l, é ligada ao objecto desde o ponto mais alto do cı́rculo. 88 Fı́sica dos Sistemas Dinâmicos l α d α l θ Fe T m mg Figura 8.1: Pêndulo simples ligado a uma mola e diagrama de corpo livre. Usaremos coordenadas polares, com origem no centro do cı́rculo e ângulo medido a partir do ponto mais baixo do cı́rculo. A coordenada r do objecto de massa m é igual a l e permanece constante (ṙ = r̈ = 0). Assim, a segunda lei de Newton para as componentes polares da força resultante é: Fθ Fr d2 θ dt2 2 dθ = −ml dt = ml (8.1) (8.2) Na direcção do versor transversal uθ actuam as componentes da força elástica, Fe , e do peso1 A mola faz um ângulo α com a barra do pêndulo e é fácil ver na figura 8.1 que α = θ/2 porque o triângulo formado pela barra e a mola é isósceles; assim, a força resultante na direcção transversal é Fθ = Fe sin θ − mg sin θ 2 (8.3) Para calcular a força elástica, precisamos do alongamento da mola. Em função do ângulo θ, o comprimento d da mola verifica a relação d θ = l cos 2 2 (8.4) 1A equação da força Fr servirá para calcular a tensão no barra, depois de θ(t) ter sido calculada, mas não vamos abordar essa parte do problema. Estabilidade e bifurcação 89 O alongamento da mola é igual a d − l e a força elástica obtém-se multiplicando o alongamento pela constante elástica k θ Fe = kl 2 cos − 1 (8.5) 2 Subsituindo na equação 8.1 obtemos uma equação diferencial ordinária de segunda ordem d2 θ k θ g θ = sin − 1 − sin θ 2 cos (8.6) 2 dt m 2 2 l As constantes k/m e g/l têm unidades de tempo ao quadrado. Convêm escrever a equação numa forma independente de unidades fı́sicas; em função do tempo “adimensional”, r g t u= (8.7) l e substituindo sin θ = 2 sin(θ/2) cos(θ/2), a equação fica θ θ θ̈ = 2(S − 1) cos − S sin 2 2 (8.8) onde θ̈ é a segunda derivada do ângulo em função de u, e o parâmetro numérico S é relação entre a força elástica e o peso, na posição mais baixa: S= kl mg (8.9) O sistema estará em equilı́brio nos pontos onde a força Fθ for nula. Nomeadamente, nos valores de θ que fazem com que o lado direito da equação 8.8 seja nulo. Existem duas possibilidades para que isso aconteça: sin(θ/2) = 0 ou a expressão dentro dos parêntesis quadrados em 8.8 igual a zero. O segundo caso será estudado na próxima secção. No primeiro caso, sin(θ/2) = 0, o ponto de equilı́brio encontra-se em θ = 0, isto é, na posição mais baixa do pêndulo2 . A série de Taylor da função no lado direito de 8.8, a partir de θ = 0 é 7 1 S −1 θ− S− θ3 + . . . (8.10) 2 8 6 Mantendo unicamente o termo dominante, a equação diferencial 8.8 aproxima-se a S θ̈ = −1 θ (8.11) 2 2 Neste sistema mecãnico o valor de θ não pode aumentar até π, pois isso implicaria comprimir a mola até um comprimento nulo, o qual é impossı́vel. 90 Fı́sica dos Sistemas Dinâmicos As forma das soluções dessa equação serão diferentes para valores de S maiores ou menores que 2. No caso de uma constante elástica fraca, S < 2, a equação 8.11 é a equação de um oscilador harmónico simples: r S 2 θ̈ = −p θ p= 1− (8.12) 2 As soluções serão movimentos oscilatórios, à volta de ponto de equilı́brio θ = 0 θ = C1 cos(pu) + C2 sin(pu) (8.13) dizemos que o ponto θ = 0 é um ponto de equilı́brio estável. Quando o sistema estiver perto do ponto de equilı́brio, a sua tendência será regressar para o ponto de equilı́brio, devido à acção do peso que neste caso é maior do que a força elástica. No caso de uma constante elástica forte, S > 2, a equação 8.11 já não é a equação de um oscilador harmónico simples r S 2 −1 θ̈ = p θ p= (8.14) 2 As soluções dessa equação são funções exponenciais θ0 ω0 θ0 ω0 θ= + epu + − e−pu 2 2p 2 2p (8.15) o primeiro termo cresce rapidamente e implica que o pêndulo se afasta da posição de equilı́brio3 . Trata-se de um ponto de equilı́brio instável; quando o sistema é afastado ligeiramente da posição de equilı́brio θ = 0, a força elástica puxa o pêndulo para cima; repare que a força elástica terá que ser pelo menos o dobro do peso, devido à diferença dos ângulos na equação 8.3. 8.2 Bifurcação Consideremos agora o segundo ponto de equilı́brio no sistema estudado na secção anterior, definido pela equação 2(S − 1) cos θ −S =0 2 (8.16) 3 quando θ já não estiver perto de zero, a aproximação que fizemos para obter a solução anterior já não é válida. Estabilidade e bifurcação 91 a solução dessa equação dá dois valores de θ, com o mesmo valor absoluto: θ = ±2 cos −1 S 2(S − 1) se S>2 (8.17) Se a constante elástica não for suficientemente forte, S < 2, só existe o primeiro ponto de equilı́brio θ = 0, e esse ponto de equilı́brio é estável. Se S for maior que 2, o ponto de equilı́brio estável bifurca-se em dois ângulos, positivo e negativo, com o mesmo valor absoluto (a demonstração de que esses pontos de equilı́brio são estáveis, deixa-se ao leitor como um dos problemas propostos no fim do capı́tulo). θ 2π/3 estável 2 instável S −2π/3 Figura 8.2: Diagrama de bifurcação do ponto de equilı́brio do pêndulo com mola e energia potencial. Em S > 2, o ponto de equilı́brio θ = 0 continua a existir, mas é agora instável. No limite S → ∞, os pontos de equilı́brio situam-se em ±2π/3, nomeadamente, os pontos onde a mola tem o seu comprimento normal l. A figura 8.2 mostra a posição do ponto de equilı́brio estável (curva contı́nua) e do ponto de equilı́brio instável (curva tracejada) em função do parâmetro S. Os pontos de equilı́brio estável correspondem a os “vales” na função de energia potencial, definida como menos a primitiva do lado direito de 8.8. 92 Fı́sica dos Sistemas Dinâmicos 8.3 Pontos fixos Consideremos um sistema autonómo com duas equações diferenciais de primeira ordem ẋ1 = f1 (x1 , x2 ) (8.18) ẋ2 = f2 (x1 , x2 ) (8.19) um ponto fixo é um ponto (x1 , x2 ) no espaço de fase, que verifica as condições f1 (x1 , x2 ) = 0 (8.20) f2 (x1 , x2 ) = 0 (8.21) para um ponto qualquer (c, d), podemos escrever cada uma das funções f1 e f2 na forma de uma série de Taylor; por exemplo, para f1 f1 = k0 + k1 (x1 − c) + k2 (x2 − d) + k3 (x1 − c)(x2 − d) + k4 (x1 − c)2 + . . . (8.22) se (c, d) for um ponto fixo, a constante k0 será nula. Os termos dominantes na série de Taylor são os termos com as constantes k1 e k2 , e essas constantes são iguais às derivadas parciais da função, no ponto (c, d); assim, perto do ponto fixo (c, d) uma boa aproximação para a função f1 é: ∂f1 ∂f1 f1 (x1 , x2 ) = (x1 − c) + (x2 − d) ∂x1 (c,d) ∂x2 (c,d) (8.23) o mesmo tipo de aproximação pode ser feito para f2 . Assim, perto do ponto fixo (c, d), o sistema de equações diferenciais pode ser aproximado pelo sistema linear ∂f ∂f1 1 " # " # ∂x1 ∂x2 ẋ1 x1 − c (8.24) = ∂f ẋ2 x2 − d ∂f 2 2 ∂x1 ∂x2 (c,d) A matriz das derivadas parciais das duas funções f1 e f2 designa-se de matriz Jacobiana ∂f ∂f1 1 ∂x1 ∂x2 J(x1 , x2 ) = (8.25) ∂f ∂f 2 2 ∂x1 ∂x2 Estabilidade e bifurcação 93 Uma mudança de coordenadas, y1 = x1 − c, y2 = x2 − d, que equivale a deslocar a origem para o ponto fixo, torna o sistema linear homogéneo ẏ = J(c, d) y (8.26) onde y é o vector (matriz coluna) com dois coordenadas y1 e y2 . Se num instante dado o estado do sistema for o vector y0 , o produto matrizial Jy será o deslocamento do estado no intervalo infinitesimal dt. Se y0 for um vector próprio da matriz J Jy0 = λy0 (8.27) onde λ é o respectivo valor próprio. Isto implica que o deslocamento do estado é na mesma direcção do vector próprio y0 ; o estado do sistema desloca-se na direcção do vector próprio, afastando-se da origem, se o valor próprio for positivo, ou aproximando-se da origem se o valor próprio for negativo. Se os dois valores próprios da matriz J forem reais e diferentes, existem dois vectores próprios diferentes. Se os dois valores próprios são positivos, o ponto fixo é um ponto onde saem linhas de campo em todas as direcções; o ponto fixo é repulsivo (figura 8.3). Se os dois valores próprios forem negativos, no ponto fixo entram linhas de campo em todas as direcções; o ponto fixo é atractivo. Se um dos valores próprios for positivo e o outro negativo, há duas linhas de campo que entram no ponto (na direcção do vector próprio do valor próprio negativo) e duas linhas de campo que saem do ponto (na direcção do vector próprio do valor próprio positivo); o ponto fixo é um ponto de sela. Figura 8.3: Os três tipos de pontos fixos, quando os valores próprios são reais. Ponto repulsivo, atractivo e de sela. As coordenadas (y1 , y2 ) podem ser transformadas em outras duas coor- 94 Fı́sica dos Sistemas Dinâmicos denadas normais (z1 , z2 ) onde o sistema de equações é mais simples " # " #" # ż1 λ1 0 z1 = (8.28) ż2 0 λ2 z2 a soluçaõ geral desse sistema é z1 = C1 eλ1 t (8.29) λ2 t (8.30) z2 = C2 e Os dois valores próprios podem também ser dois números complexos, cada um deles complexo conjugado do outro: λ = u ± iv (8.31) nesse caso as duas soluções 8.29 e 8.30 são z1 = C1 eut [cos(vt) + i sin(vt)] ut z2 = C2 e [cos(vt) − i sin(vt)] (8.32) (8.33) as constantes complexas C1 e C2 deverão ser escolhidas de forma a dar valores reais para as funções y1 e y2 ; assim, y1 e y2 serão uma combinação linear das funções eut cos(vt), eut sin(vt). Figura 8.4: Os três tipos de ponto fixo, quando os valores próprios são complexos. Em função dos valores de u e v, podemos classificar 3 casos para as linhas de campo (figura 8.4): se u for nula (valores próprios imaginários) as linhas de campo serão elipses à volta do ponto fixo; diz-se que o ponto fixo é um centro. Se u for positiva, as linhas de campo serão espirais que se afastam do ponto Estabilidade e bifurcação 95 fixo; o ponto fixo é um centro repulsivo. Finalmente, se u for negativa, as linhas de campo serão espirais que entram no ponto fixo; o ponto é um centro atractivo, ou simplesmente um atractor. Pode também existir um único valor próprio com multiplicidade igual a 2. Nesse caso, se existirem dois vectores próprios linearmente independentes, então qualquer outro vector é vector próprio com o mesmo valor próprio; as linhas de campo serão rectas a entrar ou sair do ponto fixo, conforme o valor próprio for negativo ou positivo. Se só existe um vector próprio linearmente independente, as linhas de campo agrupam-se na direcção do vector próprio. 8.4 Problemas 1. Para demonstrar que os pontos de equilı́brio estudados na secção 8.2 são pontos de equilı́brio estável, é preciso mostrar que a derivada da função no lado direito da equação 8.8 é negativa nos pontos de equilı́brio. Derive o lado direito da equação 8.8, em função de θ, e demonstre que a condição 8.16 implica um valor negativo para a derivada. 2. O sistema de equações: ẋ = x(2 − y) y ẏ = (x − 3) 2 define um modelo de Lotka-Volterra. (a) Encontre os pontos fixos. (b) Calcule a matriz Jacobiana do sistema. (c) Para cada ponto fixo, substituia as coordenadas do ponto na matriz Jacobiana e encontre os valores próprios e vectores próprios. A partir do resultado, classifique cada um dos pontos fixos e diga como serão as linhas do campo de direcções na vizinhança do ponto. (d) Use plotdf para visualizar os resultados da alı́nea anterior. Substituia as coordenadas do ponto fixo para os parâmetros xcenter e ycenter, use valores pequenos de xradius e yradius, por exemplo 0.5, aumente o valor de nsteps (por exemplo até 1000) e use “forward” no campo direction. 96 Fı́sica dos Sistemas Dinâmicos 3. Encontre os pontos fixos do sistema de Verhulst: ẋ = x − x2 − 2xy ẏ = y − y 2 + 5xy e diga como são as linhas do campo de direcções perto de cada ponto. Estabilidade e bifurcação 97
Download