Capítulo 4
Análise de Sistemas LTI no Domínio Transformado
e Sistemas IIR e FIR
1. Introdução.
2. Resposta em Freqüência de Sistemas LTI.
3. Equação Diferença de Sistemas LTI.
4. Análise da Função Sistema no Domínio da freqüência.
5. Relação entre Módulo e Fase.
6. Sistema Passa-tudo (all-pass).
7. Sistemas de Fase Mínima.
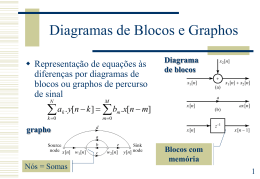
8. Representação da Equação Diferença por Diagrama de Blocos
9. Estruturas Básicas para Sistemas IIR e FIR.
1
Introdução
Um sistema LTI pode ser completamente caracterizado no domínio do
tempo pela sua resposta ao impulso h[n]. A saída y[n] devido a uma
dada entrada x[n] é especificada através da convolução soma
y[n] x[n] h[n]
x[k ]h[n k ]
k
Usando a propriedade da convolução pode-se representar transformada
Z da resposta ao impulso por:
Y(z) = H(z)X(z)
com uma ROC apropriada.
A resposta em freqüência de um sistema LTI H(e jω ) é definida como a
transformada de Fourier da resposta ao impulso h[n]. A transformada
de Fourier da entrada e da saída do sistema é estão relacionadas por:
Y(e jω ) H(e jω )X(ejω )
| Y(e jω ) || H(e jω ) || X(ejω ) |
módulo
fase[Y(e jω )] fase[ H(e jω )] fase[ X(ejω )]
2
Filtros Ideais
Filtro passa-baixas
Resposta em freqüência
1,
H lp (e )
0,
j
| | c
c | |
Filtro passa-altas
Resposta em freqüência
0,
H ap (e )
1,
j
| | c
c | |
Resposta ao impulso
sen( c n)
hlp [n]
, n
n
Resposta ao impulso
hlp [n] [n] hlp [n] [n]
sen(c n)
n
Um filtro passa baixa ideal é não causal e sua resposta se estende de
- a +. Portanto não é possível computar a saída de um filtro
passa baixa ideal recursivamente ou não recursivamente, isto é, não é
computacionalmente realizável.
A resposta em fase de um filtro passa baixa ideal é zero.
3
Fase e Retardo de Grupo
Para entender os efeitos da fase de um sistema linear, considere um
sistema com retardo ideal e a sua resposta em freqüência.
hid [n] [n nd ];
Hid(e jω ) e jnd ;
| Hid(e jω ) | 1;
fase[Hid(e jω )] ωnd , | |
com periodicidade 2 e nd inteiro.
Exemplo: filtro passa-baixa ideal
jnd
e
,
| | c
j
H lp (e )
0, c | |
sen( c (n nd )
hlp [n]
, n
(n nd )
retardo de grupo indica o grau de (não) linearidade da fase
( ) grd [ H (e j )]
d
{arg[ H (e j )]}
d
4
Retardo de Grupo
( ) grd [ H (e j )]
d
arg[ H (e j )]
d
• Se () é constante, então fase é linear ou zero.
• O desvio do valor constante indica não linearidade.
Espectro de fase
Retardo de grupo
5
Resposta para Sistemas Caracterizados por
Equações Diferenças com Coeficientes Constantes
Considere a classe de sistemas cuja relação entre a entrada e a saída
satisfazem a equação:
N
M
a yn k b xn k
K o
k
k o
k
Aplicando a transformada Z em ambos os lados, tem-se:
M
N
a z
k o
k
k
M
Y ( z ) bk z k X z
k o
H z
Y z
X z
k
b
z
k
k o
N
a z
k o
k
k
Explicitando as raízes
M
H ( z)
b0
a0
1
(
1
c
z
k )
zeros : c1, c2 ,...,cM .
1
(
1
d
z
k )
pólos: d1, d2 ,...,d N .
k 1
N
k 1
6
Exemplo 1: Dado H(z) para um sistema determine a sua equação
diferença.
(1 z 1 ) 2
H ( z)
1
3
(1 z 1 )(1 z 1 )
2
4
Y( z )
1 2 z 1 z 2
H( z )
1 1 3 2
X( z )
1 z z
4
8
1
3
1
Y ( z ) Y ( z )z Y ( z )z 2 X ( z ) 2 X ( z )z 1 X ( z )z 2
4
8
A equação diferença é portanto:
1
3
y[n] y[n 1] y[n 2] x[n] 2 x[n 1] x[n 2]
4
8
Exemplo 2:
H ( z ) (1 j 0,8 z 1 )(1 j 0,8 z 1 )(1 0,9 z 1 )
Y ( z)
H ( z)
1 0,9 z 1 0,64z 2 0,576z 3
X ( z)
y[n] x[n] 0,9 x[n 1] 0,64x[n 2] 0,576x[n 3]
7
Causalidade e Estabilidade
Um sistema é estável se a sua resposta ao impulso é absolutamente
somável, isto é:
n
|
h
[
n
]
|
ou
|
h
[
n
]
z
|
n
n
que é equivalente à condição de que a ROC inclui o círculo unitário.
Exemplo 3:
5
y[n 1] y[n 2] x[n ]
2
5
Y ( z ) Y ( z ) z 1 Y ( z ) z 2 X ( z )
2
5
Y ( z ) 1 z 1 z 2 X ( z )
2
Y ( z)
1
1
H ( z)
X ( z ) 1 5 z 1 z 2 (1 1 z 1 )(1 2 z 1 )
2
2
y[ n ]
ROC: 1. |z|>2; 2. 0,5<|z|<2;
3. |z|<0,5;
Causal: |z|>2
Estável: 0,5<|z|<2
8
Sistema Inverso: Hi(z)
1
G(z) = H(z)Hi(z) = 1, portanto, H i ( z )
H ( z)
No domínio do tempo: g[n] h[n] hi [n] [n]
1
No domínio da freqüência: H i (e )
H (e j )
Representando por uma função racional
j
M
(1 ck z )
b0
H ( z ) kN1
a0
(1 d z 1 )
1
k
k 1
1
1
0
,
5
z
Exemplo 4: H ( z )
1 0,9 z 1
1 0,9 z 1
H i ( z)
1 0,5 z 1
N
a0
H i ( z )
b0
1
(
1
d
z
k )
k 1
M
1
(
1
c
z
k )
k 1
Se a ROC é |z|>0,9, H(z) é causal
e estável e Hi(z) é ainda causal e
estável, pois os pólos e zeros
estão dentro do círculo unitário
hi [ n ] ( 0,5 )n u[ n ] 0,9( 0,5 )n1 u[ n 1]
9
Exemplo 4:
1 0 ,5 z 1
H( z )
,
1
1 0 ,9 z
z 0 ,9
1 0 ,9 z 1
Hi ( z )
1 0 ,5 z 1
H(z) é estável. Se a ROC de Hi(z) é |z|>0,5, então Hi(z) é causal e
estável.Observe que os pólos e zeros estão dentro do círculo unitário
hi [ n ] ( 0,5 )n u[ n ] 0,9( 0,5 )n1 u[ n 1]
Exemplo 5:
z 1 0 ,5
H( z )
,
1
1 0 ,9 z
z 0 ,9
1 0 ,9 z 1 2 1,8 z 1
H i ( z ) 1
z 0 ,5
1 2 z 1
Se a ROC é |z|>2, Hi(z) é causal e instável.
hi [ n ] 2( 2 )n u[ n ] 1,8( 2 )n1 u[ n 1]
Se a ROC é |z|<2, Hi(z) é estável e não causal
hi [ n ] 2( 2 )n u[ n 1] 1,8( 2 )n1 u[ n ]
10
Resposta Impulso de Funções Sistemas Racionais
• Considere a representação de expansão em frações parciais:
H z
M N
N
Ak
1
k 1 1 d k z
Br z
r 0
r
onde há somente pólos de primeira ordem.
• Cada pólo (segundo termo) contribui com uma exponencial para
h[n], tal que:
M N
N
hn
Br n r Ak d k un
n
r o
k 1
• Supondo que H(z) é causal, e que todos os pólos estão dentro do
círculo unitário.
– Se existem somente termos como os da primeira parcela, então
o sistema é chamado de FIR ( Finite Impulse Response)
– Se existem somente termos como os da segunda parcela, então
o sistema é chamado de IIR (Infinite Impulse Response) 11
Exemplo de Filtro IIR
1 2 z 1 z 2
1 2 z 1 z 2
H ( z)
3 1 1 2
1 1
1 z z
(1 z )(1 z 1 )
2
2
2
| z | 1
n
1
h[n] 2 [n] 9 u[n] 8u[n]
2
Exemplo de Filtros FIR
H ( z) 1 0,9z 1 0,5z 2 0,7 z 3 0,9z 4 z 5 z 6
h[n] [n] 0,9 [n 1] 0,5 [n 2] 0,7 [n 3] 0,9 [n 4] [n 5] [n 6]
a
h[n]
0,
n
0n N
outros valores
N
H ( z ) a n z n
n 0
1 a N 1 z N 1
1 az1
12
Resposta em Freqüência para Sistemas Racionais
• Se um sistema LTI e estável, a sua ROC inclui o circulo unitário e
conseqüentemente ele possui transformada de Fourier. Portanto a
função sistema pode ser escrita na forma.
M
H e
j
H z
z e j
H e j H e j exp( jARG[ H e j ]
M
H e j
b0
a0
1 c e
k 1
N
H e
a e
jk
k 0
N
k 0
k
1 c e
M
b
0
a0
k
k 1
N
j
k
1 d e
k 1
j
k
j
k
1 d e
j
k
k 1
j 2
b e
jk
M
b0
H e H e
a0
j
j
2
(1 c e
k 1
N
k
j
)(1 ck*e j )
j
* j
(
1
d
e
)(
1
d
k
ke )
k 1
13
Resposta em Freqüência
M
H e
j 2
b
H e H e
a
j
• Expressando H e
10log10 H e
j 2
j 2
0
0
j
* j
(
1
c
e
)(
1
c
k
ke )
k 1
N
j
* j
(
1
d
e
)(
1
d
k
ke )
k 1
em decibéis(dB):
unidade ganhoem dB
0 dB H ( e j ) 1
20log10 H e
20log
20 log10 H e
j
2
j
10
j
M
N
b0
j
20 log10 1 ck e
20 log10 1 d k e j
a0 K 1
k 1
• Relação entre entrada e saída
Y e j X e j H e j
20 log10 Y e j 20 log10 X e j 20 log10 H e j
b0
H e 1 ck e j 1 d k e j
k 1
a0 k 1
j
M
•Zero – adição de fase
• Pólos – subtração de fase
N
14
Retardo de Grupo para um Sistema Racional
grd H ( e j )
grd H e
j
d
ARG [ H ( e j )]
d
M
d
d
j
arg[1 d k e ] arg[1 ck e j ]
k 1 d
k 1 d
N
Valor Principal Fase – Devido a periodicidade da fase, considera-se
para análise, os valores compreendidos entre
ARG H e
b
ARG 0
a0
.
ARG H e j
j
e
H e j ARG H e j 2r
N
M
j
ARG 1 ck e
ARG 1 d k e j 2r( w )
k 1
k 1
15
Exemplo 1: Resposta em freqüência de filtros FIR
1, 0 n 4
h[ n ]
fora
0,
H( e
j
4
) e
jn
n 0
H ( e j ) e j 2
1 e j 5 e j 5 / 2
j / 2
j
1 e
e
h[n]
-1
0
1
1
2
e j5 / 2 e j5 / 2
e j / 2 e j / 2
3
4
n
5
sen( 5 / 2 )
sen( / 2 )
Resposta em freqüência: a) Amplitude; b) Fase; c) Retardo de grupo
16
Exemplo 2: Resposta em freqüência de filtros FIR
1, 0 n 5
h[ n ]
fora
0,
H( e
j
5
) e
jn
n 0
H ( e j ) e j 5 / 2
1 e j6
e j3
j / 2
j
1 e
e
h[n]
-1
0
1
1
2
e j3 e j3
e j / 2 e j / 2
3
4
5
6
sen( 3 )
sen( / 2 )
Resposta em freqüência: a) Amplitude; b) Fase; c) Retardo de grupo
17
n
Resposta em Freqüência de Pólo e Zero Simples
M
• Da equação que relaciona pólos e zeros
Considerando um único zero forma
H ( z ) 1 cz 1 substituindo
H ( e j ) 1 re j e j
H( e
H( e
j
j
2
j j 2
) 1 re e
b0
H e
a0
c re
j
j
1
c
e
k
k 1
N
j
1
d
e
k
k 1
j
e
1
z e
j
( 1 re j e j )( 1 re j e j )
2
) 1 r 2 2r cos( )
Calculando H ( e j ) em dB
| H( e j ) |dB 10log10 [ 1 r 2 2r cos( )]
Fase: ARG | H ( e
j
rsin( )
) | tan
1 r cos( )
1
18
Resposta em Freqüência
de Pólo Simples
H( e
j
2
) 1 r 2 2r cos( )
H ( e j )
em dB
10log10 [ 1 r 2 2r cos( )]
Valor máximo:
1 r 2 2r quando
Valor mínimo:
1 r 2 2r quando 0
19
Resposta em freqüência para
um zero simples,
r = 1; 0,9; 0,7 e 0,5.
20
Resposta em freqüência para
um zero simples, real e fora
do círculo unitário.
r = 1,09; 1,25 e 2,0.
21
Sistemas Passa Tudo (All Pass)
• Um passa tudo é um sistema da forma (ou cascata destes)
z 1 a
H Ap Z
1 az1
H Ap e
j 2
j
j
e
a
1
a
*
e
j
H Ap e j
e
1 ae j
1 ae j
j 1 a * e j j 1 ae j
e
1
e
j
j
1 ae
1 a* e
• Forma Geral - com pólos reais e complexos
z 1 d k M c ( z 1 ek* )( z 1 ek )
H Ap z
1
1
* 1
1
d
z
(
1
e
z
)(
1
e
k 1
k 1
k
k
kz )
Mr
Causal/estavel:
ek , dk 1
• Sistema passa tudo tem resposta em fase não positiva para 0<<.
• Sistema passa tudo tem sempre retardo de grupo positivo..
22
Sistema Passa Tudo
Exemplo: Passa tudo com M = N = 2Mc + Mr = 4 pólos e zeros
1
3
1
1
j
j
( z )( z 0 ,5 )
1
4 )( z 1 0 ,8e 4 )
(
z
0
,
8
e
2
4
H Ap z
1 1
3 1
j
j
( 1 z )( 1 z ) ( 1 0 ,8e 4 z 1 )( 1 0 ,8e 4 z 1 )
2
4
Im
Círculo
unitário
Mr 2 e Mc 1
Plano Z
pólo : re j zero : r 1e j
0.8
4
3
3
4
Re
0.5
2
23
Sistema de Fase Mínima
• Um sistema com todos os seus pólos e zeros dentro do círculo
unitário (causal e estável) é chamado de fase mínima. E seu
inverso é ainda causal e estável.
H (e ) H ( z) z e jw
jw
2
H ( z ) H ( z )H * (
1
H( e
)
z*
H( e
j
j
2
) H ( e j ) H * ( e j )
2
) H ( z )H * (
1
z*
)
z e j
• Conhecendo-se H(z), sem especificar a ROC, a determinação de
h[n] não é única. No entanto, se é conhecido que o sistema é de
fase mínima, determina-se a representação única de h[n] sem a
necessidade de especificar a ROC, devido aos requisitos de seus
pólos e zeros.
24
Decomposição em um Passa Tudo e um Fase
Mínima
• Qualquer sistema racional com função sistema H(z) pode ser
escrita como:
H ( z) Hmin ( z) H Ap ( z)
• Hmin(z) contém todos os pólos e zeros dentro do círculo unitário, em
cascata com um passa tudo HAp(z), com zeros rebatidos para fora do
círculo unitário.
• Propriedades do sistema de fase mínima Hmin(z) :
• Tem fase mínima.
• Tem retardo de grupo mínimo
• Tem energia mínima.
25
Exemplo1: Para ilustrar a decomposição considere o sistema
1 3 z 1
H( z )
1
1 z 1
2
1
zero : z 3; pólo : z
2
1
1
1
1
3( z ) 3( z )
3
Rescrevendo H(z) H ( z ) 3
1 1
1 1
1 z
1 z
2
2
Multiplicando e dividindo H(z) por ( 1 1 z 1 ) para completar o
3
passa tudo, tem-se:
1
1 1
1 1 1 1
3( z )( 1 z ) 3( 1 z ) z
3
3
3
3
H( z )
1 1
1 1
1 1
1 1
( 1 z )( 1 z ) 1 z
1 z
2
3
2
3
1
Hmin(z)
Hap(z)
26
Exemplo 2
3 j 4 1
3 j 4 1
( 1 e z )( 1 e z )
j
3
1
2
2
H( z )
; zeros : z e 4 ; pólo : z
1 1
2
3
1 z
3
Neste caso tem-se dois zeros fora do círculo unitário. Fatorando-se:
9 2 j4
2 j4
2 j4
2 j4
1
1
1
1
( e
z )( e z )
(z e
)( z e )
9
3
3
3
H( z ) 4 3
1
1
4
1 z 1
1 z 1
3
3
2 j 4 1
Agora, multiplicando e dividindo H(z) por ( 1 e z )
3
j
j
j
j
( 1 2 e 4 z 1 )( 1 2 e 4 z 1 ) ( z 1 2 e 4 )( z 1 2 e 4 )
9
3
3
3
3
H( z )
1 1
4
j
j
1 z
1 2 e 4 z 1 )( 1 2 e 4 z 1 )
3
3
3
27
Aplicação: Compensação da Resposta em Freqüência
G (z )
s[n]
Sistema com
distorção
Sistema
compensação
H d (z )
s c [n ]
H c (z)
Hd ( z) Hd min ( z) H Ap ( z)
H c ( z)
1
H d min ( z )
Após a compensação:
• G(z) corresponde a um sistema passa tudo.
• O módulo da resposta em freqüência é exatamente compensada.
• A resposta em fase é modificada por um fator: H Ap (e j ). 28
Função de Transferência de um filtro
• Considere a equação diferença de um sistema linear invariante,
com coeficientes constantes:
N
N
N
N
k 1
k 1
k 1
k 1
y[n] ak y[n k ] bk x[n k ] y[n] ak y[n k ] bk x[n k ]
Calculando a transformada Z de ambos os lados
N
N
Y ( z ) Y ( z ) ak z
k 1
k
N
X ( z ) bk z
k
k 1
Y ( z)
H ( z)
X ( z)
b z
k 1
N
k
k
1 ak z k
k 1
Reescrevendo H(z) como produto de duas funções
Y ( z)
1
H ( z)
N
X ( z)
k
1 ak z
k 1
N
b z k
k
k 1
29
Alternativas de caracterização completa de um sistema LTI
– através da resposta impulsional h(n):
– através da resposta em freqüência do sistema, i.e. da
transformada de Fourier de h(n), pressupondo convergência:
• em que |H(ej)| é a resposta em magnitude do sistema e
H((ej) é a resposta em fase do sistema
– através da função de transferência do sistema, i.e. da
transformada Z de h(n) e da região de convergência associada
(admitindo que existe):
estas duas últimas alternativas são particularmente
importantes na representação e análise de sistemas discretos
porque revelam muitas das suas propriedades e características.
30
Filtros ideais seletivos em freqüência
amplificam ou atenuam regiões em frequência como pretendido
– Exemplo 1: filtro ideal do tipo passa-baixas
– Exemplo 2: filtro ideal do tipo passa-altas
• NOTA 1: a fase destes filtros é nula !
• NOTA 2: estes filtros são computacionalmente irrealizáveis, porque
são não causais e suas respostas se estendem de - a +
31
Distorção de fase e atraso de grupo
a característica usualmente pretendida para o comportamento em
fase de um sistema é que seja linear, já que traduz simplesmente
um atraso do sistema:
32
• A equação de diferenças e a função de transferência
uma outra alternativa de descrever um sistema discreto é através
de uma equação linear de diferenças, com coeficientes constantes:
se as condições iniciais forem nulas, o sistema discreto é causal,
linear e invariante no tempo. Nesta circunstância, as características
e propriedades do sistema LIT são mais facilmente estudadas
através da transformada Z:
33
De onde se retira a forma algébrica da função de transferência
do sistema
Exemplo: obter a equação de diferenças do sistema LIT
caracterizado por:
Solução: H(z) pode apresentar-se na seguinte forma
de onde se conclui facilmente que:
34
Noção de estabilidade e causalidade
como já foi visto, não são requisitos necessariamente
compatíveis
35
Questão: qual é a região de convergência de Hi(z) ? É única ?
R: Pode ser qualquer uma ROC que (i.e. será válida desde que)
se sobreponha com a de H(z).
36
Caso particular importante: um sistema LIT estável e causal terá
inversa causal e estável se todos os seus zeros e polos se situarem
no interior da circunferência unitária, ou seja, se se tratar de um
sistema de fase mínima
37
os sistemas passa-tudo têm várias aplicações, como por exemplo,
compensar distorções de fase resultantes de outros sistemas.
38
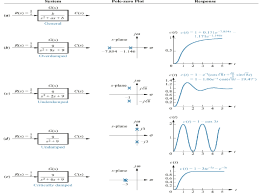
de onde se derivam os diagramas representados a seguir.
39
40
41
42
conclui-se também que com resposta impulsional real, há mais três
sistemas que têm a mesma magnitude da resposta em freqüência do
sistema H1(z), uma vez que a sua função de transferência deduz-se
da deste “rebatendo” (no sentido de recíproco conjugado) zeros (aos
pares), ou para o interior, ou para o exterior da circunferência unitária.
43
em que:
44
45
– da propriedade anterior, decorre o fato do atraso de grupo ser
minimizado para sistemas de fase mínima,
– por sua vez e decorrendo também da propriedade anterior, a energia
da resposta impulsional de um sistema de fase mínima e causal, está o
mais possível concentrada perto de n=0 (i.e. atraso mínimo de energia)
NOTA: a noção de fase-mínima e fase-máxima é válida quer para
sistemas FIR quer para sistemas IIR
46
em que α é uma quantidade (inteira ou fracionária) que traduz o atraso
de grupo constante do sistema (i.e. todas as freqüências são igualmente
atrasadas), ou seja, a fase de H(ejω) é linear em ω:
que é a equação de uma reta em ω.
47
Para simplificar, na análise seguinte, consideraremos causalidade, o que
aliado ao fato de α ser finito, implica que o comprimento da resposta
impulsional seja também finito (i.e. o sistema é do tipo FIR). Conjugando a
possibilidade deste comprimento ser par ou ímpar, com as variantes de
simetria, conclui-se que há quatro tipos de sistemas de fase linear.
48
49
50
51
52
síntese
da análise anterior resulta claro que:
→ os tipos 3 e 4 não são adequados para filtros do tipo passabaixas
• porque A(ej0)=0 (isto é, existe um zero em Z=1)
→ os tipos 2 e 3 não são adequados para filtros do tipo passa-altas
• porque A(ejπ)=0 (isto é, existe um zero em Z= -1)
→ os tipos 3 e 4 dão origem a um desvio constante de fase (π/2 ou
-π/2)
• o que é desejável para filtros diferenciadores ou
transformadores de Hilbert
53
54
55
Identificação de Sistemas
• Existem dois procedimentos básicos para identificação de sistemas:
Identificação analítica de sistemas ou modelagem fenomenológica:
envolve a análise da dinâmica do sistema físico e o desenvolvimento
de um modelo matemático para o mesmo a partir da física do
processo;
Identificação computacional de sistemas ou modelagem empírica:
envolve coleta de dados das características de entrada-saída do sistema
e utilização destes para obtenção de um modelo matemático que
aproxima este comportamento observado.
56
• A tarefa clássica de identificação a partir de dados amostrados
(modelagem empírica) pode ser representada pelos quatro passos básicos
a seguir:
Planejamento experimental – determina as variáveis relevantes e o
método de amostragem a ser utilizado;
Seleção da estrutura do modelo – seleção da estrutura do modelo e
definição dos parâmetros passíveis de serem ajustados, chamados
parâmetros livres;
Estimação de parâmetros – ajuste dos parâmetros livres usando as
estatísticas obtidas dos dados;
Validação – avaliação do desempenho do modelo para dados de teste, ou
seja, dados não empregados durante o processo de ajuste de parâmetros.
57
Download