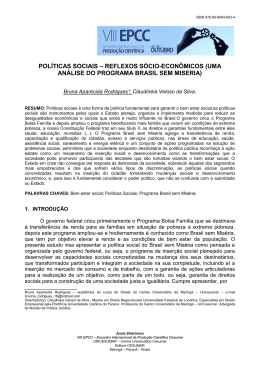
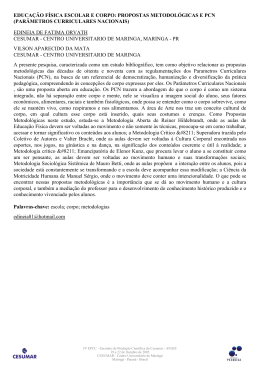
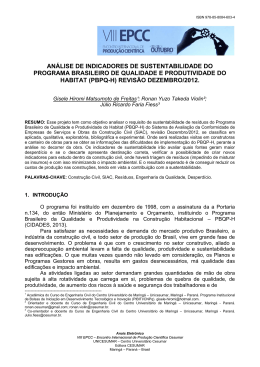
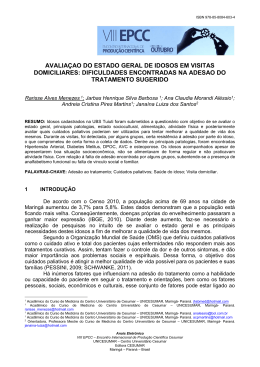
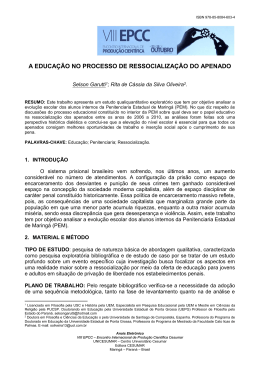
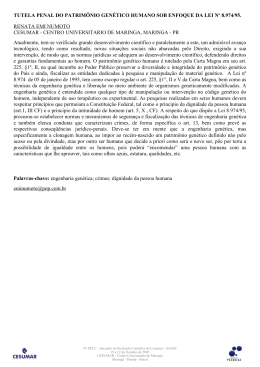
ISBN 978-85-8084-603-4 CONTROLE PID DE NÍVEL VIA DEVICENET Henrique Freitas Alabi de Souza; Leonardo Farias Ronchi**; Rosa Maria Ribeiro *** RESUMO: Este projeto foi desenvolvido objetivando verificar a importância da utilização do ensino didáticopedagógico de redes industriais, sistemas de controle e automação e instrumentação industrial. Para o desenvolvimento da pesquisa foram utilizados materiais didáticos específicos da área de sistemas de controle no intuito de se obter um controlador PID de nível controlado por uma rede DeviceNet. Foi elaborado dentro de um CLP um supervisório que controlou o nível de um tanque interligado a um secundário para sua alimentação, gerando assim gráficos onde a partir deste foi verificado a estabilização e o erro de ganho do processo. O controle PID foi desenvolvido através da função transferência obtida pela modelagem do sistema. PALAVRAS-CHAVE: Controlador PID, DeviceNet, CLP. ABSTRACT: This project was developed to verify the importance of teaching industrial networks, industrial instrumentation, controls and automation. For the research and development of the project specific materials about control systems were used to get a PID level controller to communicate with DeviceNet to control the system. Using PLC, a program was developed to control the first tank, where a second tank was used just to feed the first one. This program was able to generate graphics to verify the stability and error of the overall gain of the system. The PID controller was developed using a transfer function, which was obtained by modeling the system. KEYWORDS: PID controller, DeviceNet, PLC. 1. INTRODUÇÃO Com o desenvolvimento tecnológico atual, o ambiente digital está cada vez mais presente em nosso meio, principalmente nos arredores da automação industrial. Essas transformações vieram para reduzir custos na produção, aumentar a produtividade e lucros, juntamente com os controles automáticos que desempenham um papel fundamental no avanço da engenharia e da ciência. Segundo Silveira e Santos (1998, p.2), o homem sempre buscou simplificar seu trabalho de forma a substituir o esforço braçal por outros meios e mecanismos. O primeiro trabalho significativo de controle automático foi o regulador centrífugo construído por James Watt em meados do século XVlll. _______________________________________ *Acadêmico do Curso de Engenharia de Controle e Automação do Centro Universitário de Maringá – UNICESUMAR, Maringá - PR. Bolsista do Programa de Bolsas de Indução Científica do UNICESUMAR (PROIND). E-mail: [email protected] **Acadêmico do Curso de Engenharia de Controle e Automação do Centro Universitário de Maringá – UNICESUMAR, Maringá - PR. Bolsista do Programa de Bolsas de Indução Científica do UNICESUMAR (PROIND). E-mail: [email protected] ***Orientadora, Docente Doutora do Curso de Engenharia de Controle e Automação do Centro Universitário de Maringá – CESUMAR. E-mail: [email protected] Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil ISBN 978-85-8084-603-4 Diante disso foi observada a necessidade de se elaborar um controlador de nível de fluídos em processos industriais, para agilizar e dar maior exatidão à produtividade. Norman Nise (2011, p.4), refere o início da engenharia de sistemas em controle do nível de um líquido aos gregos por volta de 300 a. C. Estes criaram um relógio de água inventado por Ktesbios, que operava por meio do gotejamento de água para o interior do reservatório medidor a uma taxa constante. O nível de água em um reservatório medidor pode ser usado para informar o tempo decorrido. Para conseguir um gotejamento a uma taxa constante, o reservatório de alimentação tinha de ser mantido a um nível constante. Isso foi conseguido utilizando uma boia semelhante à do controle de nível de água das caixas de descarga dos vasos sanitários atuais. Sistemas de controle de nível, principalmente para controlar o parâmetro manipulável do nível do liquido, tem nas indústrias uma ampla gama de aplicações em diversos domínios. O processo de produção industrial possui diferentes locais que se vê a necessidade de controlar o nível do liquido mantendo-o em uma faixa de valores prédeterminados (setpoint). Neste projeto o controle PID de nível realiza a leitura de um set-point pré-definido pelo proprietário, controlando o nível de um tanque, por meio de uma bomba de entrada de fluxo e uma válvula de controle de fluxo de saída. Todo processo, comandado por uma rede industrial ligada a um CLP. O Controle de nível é utilizado em diversas áreas do nosso cotidiano, sejam elas industriais, residenciais, rurais, entre outras. Nas industriais o controle de nível é utilizado em vários tipos de processos, como de envasamento, arrefecimento, ou seja, processos que os níveis de líquidos necessitem serem mantidos em patamares desejados para o sucesso da produção. Caixas d’água, piscinas, reservatórios solares e pluviométricos entre outros são exemplos de controles automáticos de níveis na área residencial. No âmbito rural o controle pode ser utilizado para monitorar o reabastecimento dos cochos de animais, tanques de combustíveis utilizados por máquinas agrícolas. Erros nas medições acarretam em perca de produto gerando prejuízos pensando nisto, este projeto, no intuito de qualificar um processo que sane erros de medições, propôs-se realizar um sistema controlador do nível de um tanque. Este garantiu que o processo permanecesse constante, mantendo os tanques em níveis seguros, para que não houvesse um escoamento total de fluído e nem que ultrapassasse a sua capacidade de armazenamento. Portanto este trabalho objetivou o desenvolvimento de dois tanques interligados por uma bomba, onde nesta, foi aplicado o controle PID de nível entre os tanques, fazendo a comparação do setpoint (SP) desejado com a variável de processo (PV). 2. MATERIAIS E MÉTODOS 2.1 MATERIAIS Os materiais usados para o desenvolvimento do trabalho foram: Supervisório Elipse Scada, para controlar as variáveis de processo. Software Rockwell Automation, onde foi desenvolvida toda programação e a emulação do processo. Sistema físico dos tanques, onde permitiu elaborar a modelagem matemática. Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil ISBN 978-85-8084-603-4 2.2 METODOS Desenvolvimento do Modelo Matemático Inicialmente, foi feito um levantamento bibliográfico sobre redes industriais e controles PID’s, para o desenvolvimento matemático do controle PID de nível, encontrando a função transferência pela modelagem do sistema. Em seguida, o desenvolvimento de um supervisório para o controle do nível de dois tanques, fazendo o levantamento da função transferência através da modelagem do sistema, para assim integrar esta ao desenvolvimento da programação. Segundo OGATA, (2003, p.125), para se modelar um sistema de nível de liquido de um sistema laminar, partindo da equação 1, é necessário conhecer a resistência do fluxo (eq.2), a relação entre vazão em regime permanente e a altura do nível em regime permanente (eq.3) e a capacidade de um reservatório (eq.4), que é definida como a variação na quantidade de liquido armazenado necessário para causar uma mudança unitária no potencia (altura). dH H dQ Q Q KH ( qi qo) C h1 h 2 R equação (1) equação (2) equação (3) Em sistemas de nível de liquido com interação a modelagem é efetuada pelas definições analisando a Figura 1, através das equações (5), (6), (7), (8) e (9), segundo (OGATA, 2003, p.126): h1 h 2 q1 R1 dh1 C1 q q1 dt h2 q2 R2 dh 2 C2 q1 q 2 dt equação (4) equação (5) equação (6) equação (7) Considerando q1 como a entrada e q 2 como a saída do sistema, a função de transferência do mesmo, pode ser expressa pela equação (8). q2 1 2 Q R1C1R2C 2s ( R1C1 R2C 2 R2C1) s 1 Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil equação (8) ISBN 978-85-8084-603-4 Figura 1: Sistema de nível de líquido com interação Nesta fase do projeto, empregou-se um controlador PID e de acordo com Ogata (2003, p.557), “mais da metade dos controladores industriais em uso atualmente empregam esquemas de controle PID ou PID modificado”. Este controle é um dos mais utilizados em ambientes industriais por possuir uma simplicidade relativa em ser implantado com um desempenho satisfatório a uma vasta gama de processos. O controlador PID consiste na soma de três ações de controle, a ação proporcional, a ação integral e a ação derivativa, como pode ser observado na Figura 2. Segundo Visioli (2006, p.5), a ação proporcional tem a função de reduzir o erro de controle que um sistema pode possuir através de um ganho proporcional, mas nunca levando este erro a zero, ou seja, após ser implementado possui a função de variar a variável de controle de acordo com o erro do sistema. Normalmente este passo é representado por Kp, tendo o significado de ganho proporcional do sistema. Figura 2: Diagrama de blocos do controlador PID (VISIOLI, 2006). A integral possui como objetivo reduzir o erro do sistema a zero através de um ganho integral Ki, esta ação é capaz de definir automaticamente o valor correto do ganho a ser aplicado no sistema proporcional, deixando a curva de estabilidade em parâmetros exatos do desejado pelo ponto definido (setpoint), por esta razão esta ação também é chamada reinicialização automática. Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil ISBN 978-85-8084-603-4 Segundo Visioli (2006, p.6), já a ação derivativa possui a função de prever futuros erros que poção existir no sistema, através do ganho derivativo Kd esta ação é capaz de eliminar erros futuros como ruídos que possam influenciar na desestabilização do sistema. Com a combinação destas três ações é possível elaborar o cálculo do controlador PID através da equação (9). t u (t ) Kp.e(t ) Ki. e(t )dt Kd . 0 de(t ) dt equação (9) Onde Kp representa a parte proporcional, e(t) a parte integral e de(t), a derivativa do sistema. 3. RESULTADOS E DISCUSSÃO Com a modelagem matemática, e a programação do sistema proposto, para o controle de nível de fluídos utilizado a técnica PID, pode-se analisar e modelar os gráficos de ganhos do processo, bem como o erro entre o setpoint (SP) e a variável de processo (PV), como observado na Figura 3. Figura 3: Programação utilizando a função PID. De acordo com a Figura 4, a programação desenvolvida utilizou a função diagrama de blocos no programa Rockwell Software Rslogix 5000, mostrando as variáveis implementadas no processo. Figura 4: Programação utilizando Block Diagram. Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil ISBN 978-85-8084-603-4 Em seguida, a Figura 5, mostra a janela PID. Figura 5: Janela de configuração dos ganhos PID, variável de processo (PV) e o Setpoint (SP). Visualizando a Figura 5, observa-se a janela PID Setup do programa Rslogix 5000, onde neste é integrado os ganhos PID e o Setpoint (SP) definido do tanque utilizado. Ao ativar o modo Run, verifica-se a variável de processo e o seu erro sendo atualizados de acordo com a modelagem matemática levantada do processo. Na Figura 6, observa-se a tela de controle desenvolvida no Software Elipse Scada. Nessa, foi colocado os tanques de controle e de reserva (alimentação), bem como o sensor de nível, bomba de alimentação e a válvula de controle de saída do fluxo utilizado na simulação do supervisório. Esta Figura mostra todo o controle do Processo proposto neste projeto. Figura 6: Tela de controle desenvolvida do supervisório, no Software Elipse Scada. Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil ISBN 978-85-8084-603-4 Assim sendo, fazendo-se uma análise de todos os gráficos obtidos do processo, pode-se observar pelo comportamento dos traçados que todo o sistema se mantem estável após aproximadamente um minuto de execução, com o tanque vazio até o nível definido pelo Setpoint. A Figura 7 a seguir, mostra a estabilidade do sistema. Figura 7: Gráfico de estabilização da variável de controle e a de processo. 4. CONCLUSÕES Com o desenvolvimento do projeto, pode-se verificar o momento de estabilização entre a variável de controle e a variável de processo, já após alguns segundos de execução. Sendo que esta estabilização possui uma taxa de atualização a cada 10ms. E, fazendo uma análise dos gráficos pertinentes ao processo, pode-se afirmar que o sistema se mantém totalmente estabilizado após aproximadamente um minuto de execução, com o tanque vazio até o nível definido pelo Setpoint. Pode-se então concluir que as perspectivas com as quais o trabalho científico foi desenvolvido foram alcançadas, uma vez que foi elaborado um sistema controlador do nível de um tanque, ou seja, um controlador PID de nível. Este garantiu a constância do processo, mantendo os tanques em níveis seguros, não havendo escoamento total de fluído e nem ultrapassando sua capacidade de armazenamento. 5. REFERÊNCIAS BIBLIOGRÁFICAS ÇENGEL, Y. A.; CIMBALA, J. Mecânica dos Fluidos: Fundamentos e Aplicações. São Paulo: Mc Graw Hill, 2007. NISE, N. S. Engenharia de Sistemas de Controle. 5ª. ed. Rio de Janeiro : LTC, 2011. OGATA, K. Engenharia de Controle. 4ª. ed. São Paulo: Pretice Hall, 2003. SILVEIRA, P. R. D.; SANTOS, W. E. Automação e Controle Discreto. São Paulo: Érica, 2003. VISIOLI, A. Practical PID Control. Brescia: Springer, 2006. Anais Eletrônico VIII EPCC – Encontro Internacional de Produção Científica Cesumar UNICESUMAR – Centro Universitário Cesumar Editora CESUMAR Maringá – Paraná – Brasil
Download