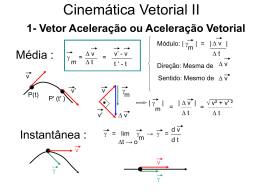
Movimento Circular INTRODUÇÃO Para um movimento ser curvo, é necessária a existência de pelo menos uma componente da aceleração perpendicular à trajetória , ou seja, a aceleração não deve estar na mesma direção da trajetória. No movimento circular, vamos estudar algumas situações, bastante cobradas em provas, como o Movimento Circular Uniforme e o Movimento Circular Acelerado. 1 MCU O Movimento Circular Uniforme é o movimento de rotação em que não há uma aceleração tangencial,ou seja, não há nada que acelere o movimento, mantendo o corpo uma velocidade angular e o módulo do vetor velocidade constante. A aceleração resultante é puramente uma aceleração centrípeta (aponta para o centro) que é sempre perpendicular a trajetória do movimento,já a velocidade é sempre tangente à trajetória e perpendicular à aceleração como mostrado na figura abaixo. Figura 3.3.0 Na figura nós podemos ver que não há aceleração tangencial, somente a aceleração em azul que aponta para o centro da curva. Para encontrar a relação entre velocidade angular e velocidade, podemos utilizar a relação da trigonometria: Figura 3.3.1 S= Sendo L o comprimento percorrido , teta o ângulo do início até o ponto que queremos e R o raio da circunferência. Derivando dos dois lados, teremos: Como Sendo (variação do ângulo) a velocidade angular, que é uma volta completa dividido pelo tempo que a partícula leva para dar uma volta, também conhecido por período. Já f significa a frequência, ou seja, quantas voltas a partícula dá em 1 segundo, sendo As unidades de medida relacionada à frequências são hertz = 1rotação por segundo ou rpm= 1 rotação por minuto, lembrando que a dimensão de frequência é a mesma da velocidade angular, que geralmente é representada por radianos por segundo, mas os autores de questões podem nos cobrar velocidade angular com medida de frequência e vice-versa. Já o módulo da aceleração centrípeta pode ser calculado por (a demonstração é meio chata, usa alguns artifícios geométricos e preferimos que você acredite na gente! ). Vetorialmente falando, sabemos que a aceleração centrípeta sempre aponta para o centro, passando para os vetores unitários em função de , a gente vai ter: Figura 3.3.2 Como , temos: Assim , consideramos o vetor na direção radial , mas apontando no sentido de dentro pra fora, já o vetor é o vetor perpendicular ao e sempre aponta na direção tangente à trajetória. Sendo assim, temos que a aceleração centrípeta é dada por: O sinal de é (-), pois o vetor aponta pra fora. Já a velocidade, aponta sempre na direção tangente à trajetória, é representada por: 2 ACELERAÇÃO TANGENCIAL Mas nem sempre o movimento circular é uniforme. Quando a aceleração resultante não aponta para o centro, como nos itens 1 e 3 da figura 3.1.6, há a presença além da aceleração centrípeta uma aceleração tangencial, que está sempre apontando na direção tangente à trajetória do corpo, sendo assim, fazendo o módulo e a direção da velocidade mudar com o tempo, sendo a aceleração resultante dada por: Podemos relacionar a aceleração tangencial com a aceleração angular , a partir da relação que demonstramos a velocidade em função da velocidade angular: Derivando duas vezes em relação ao tempo, teremos: Como (variação da variação do ângulo, ou variação da velocidade angular,ou unicamente aceleração angular). Ah, e em relação a esse a aceleração angular , podemos utilizar as mesmas regrinhas da cinemática que utilizamos para aceleração, só que ao invés de deslocamento, usamos ângulos, ao invés de velocidade, utilizamos velocidade angular e de aceleração, utilizamos aceleração angular, como abaixo: (Torricelli para ângulos) E para achar a aceleração resultante... Figura 3.3.3 Vemos nas figuras que a aceleração resultante (em azul) é a soma vetorial entre a centrípeta e a tangencial E o módulo da aceleração resultante é dado, pelo Teorema de Pitágoras por: Essa relação é válida para qualquer movimento, pois se for um MCU , já se for um Movimento Retilíneo . Ah, e se perguntarem na prova : Um MCU tem velocidade constante pois a aceleração resultante é nula, você já sabe que é falso! Ela tem aceleração e sim e centrípeta, isso costuma confundir as vezes! Transmissão de MCU Uma das aplicações do MCU é a transmissão por meio de correias, engrenagens, ou eixo comum. Vamos estudar cada caso e averiguar as relações em cada um. Correias: Liga duas circunferências por corda ou correia, transmitindo, pelo fio a velocidade linear de uma circunferência para a outra, podendo, ou não, girarem com velocidades angulares diferentes. Muito usado em bicicletas pondo os pedais na circunferência de raio maior, que para cada pedalada completa , fará a menor rodar bem mais que uma volta. Figura 3.3.4 Nesse caso, a gente terá: Figura 3.3.5 Essa relação pode ser usada sempre que o sistema for ligado por correias ou fios, vale a pena ressaltar que ambas as circunferências rodarão no mesmo sentido, ou ambos no horário ou ambos no antihorário. Engrenagens: São peças iguaizinhas a essa do símbolo do Engenharia Fácil, e elas também transferem, em módulo a velocidade linear, todavia no sentido contrário. Na imagem da direita abaixo, se a engrenagem A rodar no sentido horário, a engrenagem B rodará no sentido antihorário e a C no sentido horário de novo, sempre alternando o sentido de rotação, todavia com o mesmo módulo de velocidade linear, todavia com o sinal trocado. Figura 3.3.6 Figura 3.3.7 E a relação entre as engrenagens serão: Coloquei o módulo, pois na real em si já terão o sinal contrário do . Fixas por eixo comum: São polias ou circunferências que são fixadas por alguma haste que liga os eixos de rotação. Ela conserva a velocidade angular do movimento, e não a velocidade linear. Figura 3.3.8 Para esse caso, a gente vai ter: Figura 3.3.9 E então... Bora exercitar? E : [UFRJ-2013.1]A figura mostra um trilho no plano horizontal no qual uma partícula desloca-se da posição A para a posição B. Dentre os vetores indicados na figura não podem representar uma aceleração da partícula, nas respectivas posições 1,2 e 3. Figura 3.3.10 a) b) c) d) e) Resposta: O vetor aceleração resultante deve apontar para dentro da curva, nunca para fora como o vetor , pois a aceleração resultante é a soma vetorial da aceleração centrípeta (que aponta para o centro da curva) e a aceleração tangencial que é sempre tangente, e a soma de um vetor tangente e outro que aponta pro centro da curva, dá outro vetor que aponta pra dentro da curva, nunca pra fora. Logo os vetores podem representar a situação mostrada, mas nunca o vetor . Alternativa Correta Letra B. E :[UFRJ-2012.1] Uma partícula descreve um movimento circular com velocidade de módulo constante e igual a V. Num intervalo de tempo em que percorre ¼ da circunferência, o módulo do vetor velocidade média é igual a a) b) Resposta: Temos o seguinte caso: c) 2V d) e) Figura 3.3.11 A velocidade do MCU é V, logo: Já o vetor velocidade é dado por: Dividindo uma equação por outra, teremos: : [Moysés Nussenzveig] Na figura, a roda maior, de 30cm de raio, transmite seu movimento à menor,de 20 cm de raio, através da correia sem fim C, que permanece sempre bem esticada e sem deslizamento. A roda maior, partindo do repouso com aceleração angular uniforme, leva 1 min para atingir a sua velocidade de regime permanente, e efetua um total de 540 rotações nesse intervalo de tempo. Calcule a velocidade angular da roda menor uma vez atingido o regime permanente. Figura 3.3.12 Resposta: Como as polias estão interligadas por uma correia, podemos utilizar a relação: Já para achar , temos: Temos que a polia maior acelera de relacionar as variáveis pelas equações: até com aceleração constante, logo podemos Dividindo (II) por (III), temos: Substituindo na equação (I), a gente finaliza! Assim como na apostila de cinemática 2D, o exercício desse conteúdo está na apostila de movimento relativo, a próxima apostila, por causa da mistura constante dos assuntos nas provas, achamos melhor colocar todos juntos! Show? Bons estudos!!
Download