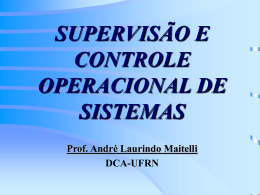
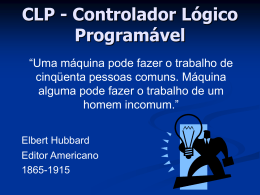
ESCOLA DE ENGENHARIA DE PIRACICABA FUNDAÇÃO MUNICIPAL DE ENSINO DE PIRACICABA – FUMEP LABIRINTO PNEUMÁTICO Rafael Momesso Cardoso; Gabriel De Latorre Ribeiro; Rodrigo Rasera GESTÃO DE PROJETOS MECATRÔNICOS - CURSO SUPERIOR DE ENGENHARIA MECATRÔNICA Resumo Projeto desenvolvido por alunos do 9º semestre de Engenharia Mecatrônica da Escola de Engenharia de Piracicaba, que tem como finalidade a construção e automatização de um equipamento que simule um jogo do tipo labirinto. Para este projeto, foram utilizados sensores, atuadores pneumáticos, válvulas reguladoras de fluxo e um Controlador Lógico Programável (CLP), o qual realizará todo o controle da automação envolvida no projeto. O projeto mecânico foi desenvolvido utilizando-se os softwares Solid Works e AutoCad; a programação lógica foi realizada utilizando-se o software LAD da fabricante WEG na linguagem Ladder. Entradas do Joystick Tensão de Alimentação (127 V) CLP Saída para os led’s azuis Introdução A palavra automação tem origem no latim e significa mover-se por si próprio. Um sistema automatizado possui mecanismos que funcionam através de uma pré programação e com o mínimo possível de interferência do ser humano. A automação faz uso de técnicas de mecânica, computação e elétrica, diminuindo a mão de obra em diversos processos; o que auxilia na diminuição dos custos e no aumento da velocidade de produção. Hoje em dia a automação pode ser utilizada nas mais diversas áreas, dentre elas destacam – se a área industrial, comercial e a residencial. Um recurso muito utilizado na automaçao nos dias de hoje é o Controlador Lógico Programável, também conhecido como CLP. Este aparelho possui uma memória interna, onde são armazenadas instruções para a execução de uma determinada tarefa; com isso, todas as informações de entrada captadas pelos sensores ficam armazenadas no CLP, de modo que, a saída esperada seja executada. Deste modo, a automação se faz muito presente em nosso cotidiano; seja em casa, no carro, no trabalho, e em muitos outros lugares, tornando-a de grande importância. Este projeto irá automatizar um jogo chamado labirinto que irá utilizar os recursos de automação aplicados ao entretenimento de jovens e adultos. Os jogos são uma das práticas de maior entretenimento atualmente e um número cada vez maior de pessoas aderem a esta prática, seja pelo prazer e pela diversão, ou pelo interesse no mercado. Saídas para as válvulas atuadoras Saída para os led’s brancos Resultados Dimensões da mesa: 1200 x 800 x 197 mm Altura Total: Cilindro Acionado – 650 mm Cilindro Recuado – 600 mm Altura da base: 125 mm Peso Total do projeto: Aproximadamente 40 Kg Custo Total do Projeto: R$3.024,47 Consumo: Ar comprimido – Pressão a 4 bar = 634 L/min Energia – 127 V Objetivo Desenvolver um sistema eletro-pneumático controlado por CLP que visa movimentar uma mesa retangular com um labirinto interno, para levar uma esfera metálica de um ponto a outro no labirinto. Esta mesa será comandada através de um joystick, o qual controlará o acionamento dos atuadores eletro pneumáticos de acordo com a lógica programada em Ladder, para o controle do projeto será utilizado um Controlador Lógico Programável. Controle de Fluxo Cilindros Pneumáticos Metodologia Preparador de Ar O projeto apresenta o desenvolvimento e automação de um jogo do tipo labirinto, onde um tabuleiro retangular (mesa) será apoiado em 4 pistões pneumáticos controlados por um CLP. De acordo com a lógica implementada o tabuleiro irá variar sua posição e elevação fazendo com que uma esfera metálica se movimente até achar o caminho correto para a saída do labirinto. Para controle dos movimentos do labirinto foi desenvolvido um controle tipo joystick que envia sinais elétricos para o CLP, que aciona os atuadores eletro-pneumáticos (Cilindros pneumáticos) que darão suporte e movimento a mesa, a vazão de ar será controlada por válvulas controladoras de fluxo. Toda a programação lógica foi feita em linguagem Ladder. CLP O Jogo Distribuidor de Ar O objetivo do jogo é guiar a bola pelo labirinto para se chegar ao ponto final dentro de um determinado tempo pré-estabelecido, caso contrário, coloca-se, manualmente, a bola de volta a posição inicial e é passada a vez ao próximo jogador. A matéria prima utilizada do labirinto é a madeira MDF (Fibra de Média Densidade) de baixo custo e menor peso. As figuras 1 e 2 apresentam os desenhos que foram desenvolvidos utilizando-se os softwares de desenho AutoCad e Solid Works. Figura 4 – Base do projeto Labirinto Válvula Atuadora 5/2 vias Joystick Mesa Figura 1 – Vista 3D do projeto Figura 2 – Vista superior do projeto Projeto Mecânico O labirinto será movimentado através de 4 cilindros pneumáticos, cada um ligado a uma válvula controladora de fluxo que regulará a passagem do ar e conseqüentemente o movimento linear do cilindro. A figura 3 ilustra o esquema de apoio da mesa nos cilindros, porém ainda não estão presentes as válvulas nem o regulador de pressão. O software Solid Works foi usado para estes desenhos. Figura 5 – Projeto Labirinto Finalizado Cilindro Pneumático Conclusão Base do Projeto Figura 3 – Vista 3D sem a mesa superior Após vários meses de desenvolvimento e execução, pudemos concluir que o funcionamento do projeto foi satisfatório e alcançou os objetivos preconizados inicialmente. Os dispositivos mecatrônicos projetados tiveram funcionamento adequado, executando os movimentos controlados pelo CLP e comandados pelo controle (joystick). As ferramentas de engenharia utilizadas para o desenvolvimento deste projeto se mostraram satisfatórias para o mesmo. Observamos também a importância em se fazer um bom planejamento com todo o grupo, para otimizar o aproveitamento dos recursos de materiais e de mão de obra. Projeto Elétrico Bibliografia Para o projeto do labirinto pneumático, todo o controle é realizado por um Controlador Lógico Programável. Este projeto utiliza um total de 7 entradas e 6 saídas, a alimentação elétrica é de 127 V (CLP), 24 V para as válvulas atuadoras e 12 V para os led’s. Para a entrada do sinal de comando foi utilizado um joystick que está ligado as entradas do CLP, as válvulas solenóides que acionam os cilindros pneumáticos estão ligados as saídas do CLP. Há também uma entrada para o acionamento do jogo (botão Liga) e uma entrada para desativar todo o sistema (botão Desliga), além de um sensor que será ativado quando a esfera atingir o buraco de chegada, que acionará todos os leds da mesa por alguns segundos. A programação responsável pelo funcionamento do jogo foi feita utilizando-se a linguagem Ladder e o software LAD da fabricante WEG. PERUCIA, Alexandre; BERTHÊM, Antônio; BERTSCHINGER, Guilherme; CASTRO, Roberto R. Desenvolvimento de jogos eletrônicos “teoria e pratica” – editora NOVATEC, 2005. 302 p. HOLANDA, Aurélio Buarque de. Novo dicionário da língua portuguesa. 12a. impressão. Rio de Janeiro: Nova Fronteira, 1975. p. 163. Wikipédia – A Enciclopédia Livre. AUTOMAÇÃO. 2011. 1 Página. Acesso em: 30/03/2011. Disponível em: < http://pt.wikipedia.org/wiki/Automa%C3%A7%C3%A3o> Wikipédia – A Enciclopédia Livre. CONTROLADOR LÓGICO PROGRAMÁVEL. 2011. 1 Página. Acesso em: 30/03/2011. Disponível em: < http://pt.wikipedia.org/wiki/Controlador_l%C3%B3gico_program%C3%A1vel> Micro Controlador Programável. Manual do Usuário. WEG Clic 02. VersãoS1. 09/2007.
Download