EPUSP
Automação Elétrica
de Processos
Industriais
Parte II
Prof. Kleber Montalvão
1
EPUSP
Redes de
Automação
2
EPUSP
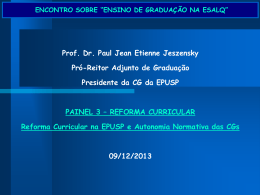
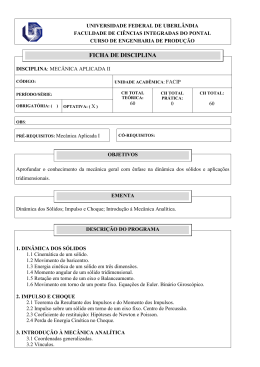
Hierarquia entre Redes
Nível de
Gerenciamento Mainframe
Corporativo
WANs
NÍVEL 5
Nível de
Gerenciamento de
Workstation
Planta
NÍVEL 4
Nível de Supervisão
LANs
Workstation,
PC
- Ethernet
- MAC
- TCP/IP
NÍVEL 3
Nível de Controle
- ControlNet
- Profibus FMS
- LonWorks
- FieldBus HSE
CLP, PC,
CNC
NÍVEL 2
Nível de Dispositivos de campo, sensores e
atuadores
- FieldBus H1
- DeviceNet -CAN
- Profibus DP, PA
- Hart
- Asi
- LonWorks
- InterBus
Barramentos
de Campo
sensores e
atuadores
NÍVEL 1
3
EPUSP
Nível 1
•
Nível dos dispositivos de campo, sensores e
atuadores.
•
Onde atua o controlador programável.
Nível 2
•
Neste nível, localizam-se os Controladores que
atuam nos dispositivos de campo do nível 1.
•
Integração entre unidades inteligentes.
Nível 3
•
Possui algum tipo de supervisão associada ao
processo
•
Neste nível, localizam-se os concentradores de
informações sobre o Nível 1 e as Interfaces
Homem-Máquina (IHM).
4
EPUSP
Nível 4
•
controle do processo produtivo da planta;
constituído por bancos de dados, MRP, etc.
Nível 5
•
Programação
realizando
o
e
planejamento
controle
e
a
da
produção
logística
dos
suprimentos.
•
Administração
dos
recursos
da
empresas.
Possui softwares para gestão de vendas e
gestão financeira, é feita a decisão e o
gerenciamento de todo o sistema, SAP, etc.
5
EPUSP
Redes de Comunicação
Redes Abertas - Modelo de Referência OSI
N.º 7: Aplicação (application), todo processo específico da
aplicação do sistema;
N.º
6:
Apresentação
(presentation),
transformações
e
representações da informação;
N.º 5: Sessão (session), manutenção da associação entre
entidades da aplicação e controle dos diálogos;
N.º 4: Transporte (transport), controle de fluxos e de erros
entre estações;
N.º
3:
Gerência
da
rede
(network),
encaminhamento
(routing), chaveamento e outros internos à rede;
N.º 2: Transmissão de dados (data transmission), controle de
fluxos e de erros, e acesso ao meio de comunicação;
N.º 1: rede física (physical network), transferência de bits e
de sinalização.
6
EPUSP
Redes de Comunicação
Redes Abertas - Modelo de Referência OSI
Modelo de referência OSI da ISO
7
EPUSP
Principais
Conceitos de Rede
EPUSP
Meio Físico de Comunicação
Jacket of PVC or Teflon
Jacket made of PVC or Teflon
Cabo de Par Trançado
Cabo Coaxial
Fibra Óptica
Radio Frequência
9
EPUSP
Tecnologia de Comunicação
Ponto-a-ponto
-
Desperdício de banda, repetição dos dados
quando apena o destino é diferente.
-
Dado é enviado várias vezes.
ALL EN-BRADL EY
P a n e lV ie w 5 5 0
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
F7
F8
F9
F1
0
-
^
F5
<
F6
3
< -----------------'
>
v
10
EPUSP
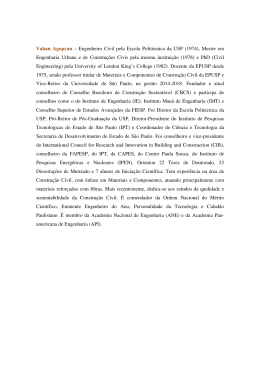
Tecnologia de Comunicação
Produtor-Consumidor
– múltiplos nós podem simultaneamente
consumir os dados de um mesmo produtor
– nós podem ser sincronizados
– utilização mais eficiente da banda de
comunicação
ALL EN-BRADL EY
P a n e lV ie w 5 5 0
CTRL2
CTRL1
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
#
2
F7
F8
F9
F1
0
HMI
-
^
F5
<
F6
3
< -----------------'
>
v
#1
Sensor
• Mensagem #1
– referência de posição do sensor transmitida em
multicast aos CTRL1, 2 e IHM
• Mensagem #2
– comando de velocidade do CTRL1 transmitido
simultâneamente aos 3 drives e IHM
• Multicast não é possível com modelo
origem/destino
– no sistema acima teríamos necessariamente 7
mensagens
11
EPUSP
Tecnologia de Comunicação
Comparação: Informando a hora para
uma sala com 15 pessoas
Ponto-a-ponto x Produtor/Consumidor
Ponto-a-ponto
•
Uma pessoa (origem) informa individualmente a cada
uma das outras pessoas na sala (destino) o horário
marcado em seu relógio (dado)
•
O tempo continua passando enquanto a “origem “
informa o horário a cada um
- dados não estarão corretos após as primeiras
pessoas
- tanto origem como destinos terão que fazer ajustes
para se alcançar algum tipo de sincronismo
•
A agilidade deste processo varia em função do
número de pessoas na sala
12
EPUSP
Tecnologia de Comunicação
Comparação: Informando a hora para
uma sala com 15 pessoas
Ponto-a-ponto x Produtor/Consumidor
Produtor/Consumidor
• Uma pessoa informa o horário (produtor) a todos os
presentes
•
Todas as 20 pessoas recebem a informação
simultaneamente
•
Algumas pessoas podem optar por “consumir”os
dados (reconhecer a recepção por um gesto, ajustar
seus relógios, etc..)
•
Outros podem optar por não “consumir” a informação.
•
Altamente eficiente (os dados são produzidos apenas
uma vez, não são necessários ajustes adicionais para
produtores e/ou consumidores)
•
Altamente determinístico (tempo de transmissão não
muda se mais pessoas entrarem ou sairem da sala)
13
EPUSP
Tecnologia de Comunicação
Mestre-Escravo
• Escravo: Periférico Passivo
• Dispositivos escravos trocam dados apenas
com o Mestre
ALL EN-BRADL EY
P a n e lV ie w 5 5 0
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
F7
F8
F9
-
^
F5
<
F6
3
< -----------------'
F1
0
>
v
Multimestre
• Mais de um mestre
• Cada mestre tem seu próprio conjunto de
escravos.
• Dispositivos escravos apenas trocam dados
com seus mestres.
AL L EN-BRADL EY
P a n e lV ie w 5 5 0
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
F5
F6
F7
F8
F9
F1
0
3
-
< -----------------'
^
<
>
v
14
EPUSP
Método de Troca de Dados
CSMA/CD
- Carrier Sense Multiple Access/Colision Detection
- Quando dispositivo detecta a colisão, a
transmissão é abortada e após um tempo
randômico o dispositivo tenta transmitir
novamente.
Token-Passing
-O Token: sequência especial de bits que circula
dentro do anel
-Caso um dispositivo queira transmitir, ele deve
“capturar” o token, substituindo-o por um frame
15
EPUSP
Método de Troca de Dados
Cíclica
• Os dispositivos produzem (transmitem) dados
a uma taxa configurada pelo usuário
(entrada/saída).
• Vantagens:
- Dados transferidos a uma taxa adequada
ao dispositivo/aplicação.
- Recursos podem ser preservados para
dispositivos com alta variação.
ALL EN-BRADL EY
P a n e lV ie w 5 5 0
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
a cada 100ms
a cada 5ms
F7
F8
F9
a cada 2000ms
analog I/O
16
F1
0
-
^
F5
<
F6
3
< -----------------'
>
v
EPUSP
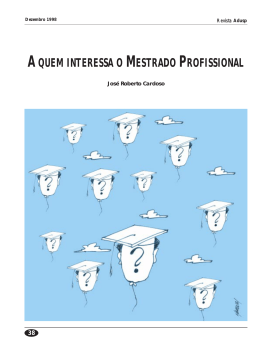
Método de Troca de Dados
Polling
• Quando os dispositivos recebem dados
(normalmente saídas) imediatamente enviam
seus dados (normalmente entradas)
• Compatível com sistemas Mestre/Escravo &
Multimestre
- Normalmente não é utilizado com “peer-topeer”
• Desenvolvido sobre origem/destino,
mestre/escravo
ALL EN-BRADL EY
P a n e lV ie w 5 5 0
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
F5
F6
F7
F8
F9
F1
0
3
-
< -----------------'
^
<
>
v
17
EPUSP
Método de Troca de Dados
Mudança de Estado
• Dispositivos produzem dados apenas quando
tem seu estado alterado
• Existe um sinal em segundo plano transmitido
ciclicamente para confirmar que o dispositivo está
funcionando corretamente.
• Vantagens:
- reduz significativamente o tráfego da rede
- recursos não são desperdiçados
processando-se dados antigos
ALL EN-BRADL EY
P a n e lV ie w 5 5 0
7
8
9
4
5
6
1
2
.
0
<
F1
F2
F3
F4
F5
F6
F7
F8
F9
F1
0
3
-
< -----------------'
^
<
>
v
digital I/O
18
EPUSP
•
Performance da Rede
Velocidade:
– Taxa de transferência total de dados por unidade de
tempo.
– Considera informações (dados úteis) e o Envelope
de Comunicação (dados de controle do protocolo).
•
Throughput:
– Taxa de transferência de informações por unidade
de tempo.
– Considera apenas os dados efetivamente úteis para
os integrantes da Rede.
Confiabilidade da Rede
•
Redes Probabilísticas:
– Permite apenas calcular a probabilidade da
transferência de informações ocorrer em um
determinado intervalo de tempo.
•
Redes Determinísticas:
– Permite determinar com precisão o tempo
necessário para a transferência de informações
entre os integrantes da Rede.
19
EPUSP
Topologias de Redes
I) Meio Partilhado
Computador/Terminal/
Estação Remota
Esquema de Rede em Barra
Computador
Esquema de Rede em Anel
20
EPUSP
II) Ponto a Ponto
Esquema de
Rede em
Estrela
anfitrião
terminais
Esquema
de Rede
em Grafo
Esquema de
Rede em
Árvore
21
EPUSP
Considerações
•
Necessidade
•
Custo (Projeto / Instalação / Produtos)
•
Fácil Instalação / Configuração / Expansão
•
Procedimento de Manutenção Simples
•
Quantidade de Dispositivos
•
Tecnologia Consolidada
•
Disponibilidade de Produtos
22
EPUSP
Sistemas
Supervisórios
Interfaces Homem Máquina
(IHM)
23
EPUSP
Sistemas Supervisórios e Interfaces
Homem-Máquina
.....+ 2500 circuitos...
Quais são importantes
de serem
supervisionados?
Circuito Elétrico
Sistemas Supervisórios:
- permite a supervisão e o comando de
determinados pontos da planta automatizada.
IHM:
- recebe sinais do CLP e do operador
- envia sinais para o CLP atuar nos
equipamentos instalados na planta
- pode ser um equipamento especial que
localiza-se no campo
24
EPUSP
Introdução
•Sistemas automatizados complexos
•Necessidade de uma interface amigável
•Facilitar o trabalho de operação
•Supervisionar e controlar pontos da planta
automatizada.
•O PLC envia estes sinais por meio de TAG’s
ou bits para a IHM.
•É necessário saber de onde virá a variável e
como será manipulada pelo PLC ou pelo
supervisório, podendo ser do tipo DDE,
Memory ou Device.
25
EPUSP
IHM / HMI (Interface Homem Máquina / Human
Machine Interface)
1.1
Normalmente são utilizadas para sistemas de
automação, onde o número de variáveis de
entradas e saídas é reduzido (centenas de pontos).
A IHM está normalmente próxima à linha de
produção instalada na estação de trabalho,
traduzindo os sinais vindos do CLP para sinais
gráficos, de fácil entendimento.
Há várias aplicações e utilizações para uma IHM:
· visualização de alarmes gerados por alguma
condição anormal do sistema
•·
visualização de dados dos motores e/ou
equipamentos de uma linha de produção
· · alteração de parâmetros do processo
· · alteração de configurações de equipamentos26
EPUSP
1.1.1
Meios de Comunicação da IHM
Existem, basicamente, três meios de comunicação
entre a IHM e o controlador do sistema
· Comunicação direta com o controlador
·
Comunicação em rede de chão-de-fábrica –
Fieldbus
Comunicação em um nível superior de uma rede
Fieldbus
Comunicação direta entre uma IHM e um CLP
27
EPUSP
IHM em uma rede Fieldbus
CLP, PC e IHM na mesma rede Fieldbus
28
EPUSP
•SCADA – SUPERVISORY CONTROL AND DATA
ACQUISITION (Aquisição de Dados e Controle da
Supervisão)
O sistema SCADA foi criado para supervisão e
controle de enormes quantidades de pontos
(centenas de milhares) de entrada e saída digitais e
analógicos distribuídos.
Sua aplicação tem sido implementada tanto na área
civil quanto na industrial.
Estes sistemas visam a integridade física das
pessoas, equipamentos e produção, consistindo
muitas vezes por sistema redundantes de hardware
e meio físico (canal de informação) e permitindo
pronta identificação de falhas.
29
EPUSP
Aplicações em Sistemas Supervisórios
Em sistemas complexos é muito difícil avaliar o que
está acontecendo quando a análise é feita
diretamente na programação dos PLC’s, ou seja, na
representação baseada em lógica de relés, muito
comum no mercado.
Quem faz o controle da planta é o CLPs, baseado
na programação existente em seu interior.
Como o PLC envia
Supervisório atuar?
sinais
para
o
Sistema
O PLC envia estes sinais por meio de TAGs, ou
seja, envia bits para o computador. Estes sinais
enviados levam consigo informações como
endereço dentro do PLC, para o caso de retorno da
informação e, também informações sobre o tipo de
TAG.
Os Sistemas Supervisórios apresentam vários tipos
de TAGs que servirão a propósitos distintos.
30
EPUSP
Aplicações em Sistemas Supervisórios
É necessário saber de onde virá a variável e como
será manipulada pelo CP (caso seja) ou pelo
supervisório, podendo ser do tipo DDE, Device ou
Memory.
Onde:
· DEVICE significa que os dados se originam dos
CP’s.
· DDE (Dynamic Data Exchange) significa que os
dados se originam de um DDE server.
· MEMORY significa que os dados existem
localmente no supervisório, uma espécie de
auxiliar.
31
EPUSP
Tipos de Variáveis
DEVICE: os dados se originam dos PLC’s.
São definidas tags para estas variáveis e um
endereço físico é associado a elas.
Exemplo de funções associadas a uma tag:
Nome da tag: Digital1
Estado de Alarme: Ativo
Prioridade de Alame: 2
Nome de Acesso: CLP-teste
Endereço: I:0/3
32
EPUSP
Tipos de Variáveis
•MEMORY: os dados existem localmente no
supervisório.
Exemplo: Variável Memória real utilizada como
contador.
33
EPUSP
Ambiente de trabalho
•Desenvolvimento
é
o
ambiente
de
desenvolvimento das telas gráficas onde se cria
o desenho que será animado.
•Run Time é o ambiente onde se mostra a janela
animada criada no modo de desenvolvimento.
34
EPUSP
Atividades dos Operadores
Operação Normal:
- Vigilância, detectar defeitos ou falhas possíveis
- Observação sistemática dos indicadores essenciais a uma
visualização sobre o estado geral do processo. Nem todos os
parâmetros são observados com a mesma freqüência, pois:
• alguns parâmetros fornecem mais informações;
•alguns aparelhos são mais estáveis;
•algumas desregulagens são mais graves;
•alguma unidade específica está em uma fase de
operação particular.
Operação sob Contingência:
-Simultaneidade de vários eventos simples causadores de
perturbações no processo.
-Tomada de ações devido a falhas nos equipamentos.
-Reconhecimento de Alarmes.
35
EPUSP
Planejamento do Sistema
Supervisório
1) Entendimento do processo a ser automatizado
2) Tomada de dados (variáveis)
3) Planejamento do banco de dados
4) Planejamento dos alarmes
5) Planejamento da hierarquia de navegação entre telas
6) Desenho de telas
7) Gráfico de tendências dentro das telas
8) Planejamento de um sistema de segurança
9) Padrão Industrial de Desenvolvimento
36
EPUSP
1)
Entendimento
automatizado
Verificar
o
do
processo
funcionamento
do
a
ser
processo
completo, com ênfase na parte que deverá ser
monitorada pelo sistema supervisório.
O CLP pode possuir muitas variáveis, porém
devem ser estudadas somente as que aparecerão no
supervisório.
37
EPUSP
2) Tomada de dados (variáveis)
O tempo de aquisição das variáveis deve ser
definido de acordo com a necessidade. Podem ser
definidos
diferentes
tempos
para
grupos
de
variáveis, de acordo com o aplicativo do sistema
supervísório utilizado.
38
EPUSP
3) Planejamento do Banco de Dados
O CLP lida com um número muito grande de
variáveis, porém, somente uma parte é necessária
para o desenvolvimento do sistema supervisório.
Além disso, é necessário fazer a distinção
entre as variáveis que serão salvas no computador e
as que servirão de indicação.
Exemplo:
Algumas
variáveis
analógicas
importantes para o processo são salvas periodicamente
no disco rígido. Para tanto, o item destacado na figura a
seguir deve ser selecionado na definição da tag (a forma
de definir varia de acordo com o aplicativo utilizado).
39
EPUSP
4) Planejamento de alarmes
condições
os
alarmes
serão
1)
sob quais
acionados
2)
quais operadores serão notificados por esses
alarmes
3)
quais mensagens deverão ser enviadas
4)
quais ações deverão ser tomadas na ocorrência
desses alarmes
5)
chamar a atenção do operador sobre uma
modificação do estado do processo
6)
sinalizar um objeto antigo
7)
fornecer indicação global sobre o estado do
processo.
40
EPUSP
5)
Planejamento
de
uma
hierarquia
de
navegação entre telas
O sistema supervisório do processo deve possuir
menu que possibilite a navegação entre telas de
forma amigável para o operador.
A seguir são apresentados exemplos de telas de
supervisório.
41
EPUSP
Exemplo Tela para navegação
Geralmente, os supervisórios possuem na barra
inferior um menu para navegação entre telas.
42
EPUSP
6) Desenho de telas
Algumas empresas possuem um padrão para
desenvolvimento de Telas de Supervisório.
Somente os dados necessários para o processo
devem ser exibidos na tela, para simplificar seu
entendimento.
De acordo com a necessidade, os sistemas de
supervisão possuem vários níveis de
desenvolvimento, desde simples interfaces de
monitoração até sistemas avançados de iteração
com o operador.
A seguir são apresentados alguns exemplos.
43
EPUSP
Exemplo de tela simples
44
EPUSP
Exemplo tela de complexidade média
45
EPUSP
Exemplo de tela avançada
46
EPUSP
7) Gráfico de Tendências
Para variáveis analógicas que precisam de
um monitoramento mais completo, podem ser
utilizados gráficos de tendências.
47
EPUSP
Gráfico de Tendências
48
EPUSP
8) Planejamento de um sistema de
segurança
Os sistemas supervisórios possuem funções de
segurança avançados que permitem a criação
de usuários com níveis de segurança.
Abaixo encontra-se um exemplo de tela de
configuração de usuários:
49
EPUSP
Modelamento
e projeto
pelas Redes
de Petri
50
EPUSP
Sistemas a Eventos Discretos e
Redes de Petri
Classificação dos Sistemas e Processos
51
EPUSP
Sistemas contínuos no tempo e
sistemas a eventos
Comportamento do sistema
52
EPUSP
Sistemas a Eventos Discretos
SED's são sistemas em que os sinais:
a)
Valores num conjunto discreto, como {on, off},
{verde, amarelo}, {1, 2, 3, ...};
b)
Alterações de valor são tão rápidas que se podem
modelar como instantâneas, em qualquer instante t
R;
c)
Duas possíveis razões para alteração: ocorrência de
eventos
instantâneos
externos,
isolados
e
independentes; ocorrência de eventos internos,
definidos por rigorosas cadeias lógicas.
Exemplos de Sistemas a Eventos
Discretos
Contador energizável por um
intertravamento lógico
53
Filas de Serviços
EPUSP
Filas de Serviço
Manufatura com
retrabalho
Recepção
Processo
industrial job-shop
Processo industrial flow-54
shop
EPUSP
Redes de Petri
Rede de Petri (RP) é uma quíntupla (P, T, A, W, m0) em
que
•P={p1...pn} - conjunto finito de posições ou lugares;
•T={t1...tm} - conjunto finito de transições;
•A - conjunto finito de arcos pertencente ao conjunto
(P x T) (T x P)
•(P x T) - conjunto dos arcos orientados de pi para tj
(pi, tj)
•(T x P) - conjunto dos arcos orientados de ti para pi
(ti, pi);
•W : função que atribui um peso w (número inteiro) a
cada arco;
•m0 - vetor cuja i-ésima coordenada define o número
de marcas (tokens) na posição pi, no início da
evolução da rede.
Simbologia
= posição / lugar
= transição
= arco orientado
55
EPUSP
Exemplo de Rede de Petri aplicado a caixa
Bancário Automático
Rede de Petri
56
EPUSP
Pré-sets e Pós-Sets
Pré-set de t : = •t : = { pi P | A (ppt)}
ou seja, o pré-set de t, •t é o conjunto das posições em
P a partir das quais existe arco para a transição t;
Pós-set de t: = t •: = {piP | A (t, pi)};
ou seja, o pós-set de t, t•, é o conjunto das posições
em P para as quais existe arco oriundo da transição t;
Pré-set de p: = • p: = { tj T | A (tj , p)};
Pró-set de p : = p • : = { tj T | A (p, tj )};
57
EPUSP
Execução das Redes de Petri
= Movimentação das marcas, pela rede, conforme
regras
= HABILITAÇÃO + DISPARO
I. Uma transição tj é HABILITADA por uma marcação m
se, para todo pi tj, m(pi) w(pi, tj)
m: nº de marcas em pi
w: peso do arco pi tj
II. Uma transição habilitada é DISPARADA por duas
operações:
a) remoção de marcas das posições do pré-set
(tantas marcas quanto for o peso do arco
correspondente)
b) depósito de marcas nas posições do pós-set
(tantas marcas quanto for o peso do arco
correspondente)
Se a transição for temporizada, com tempo T, este
tempo será introduzido entre II.a e II.b.
Se a posição for temporizada, com tempo T, este
tempo será introduzido antes que a posição possa
habilitar alguma transição.
58
EPUSP
Execução das Redes de Petri
Exemplos
.
2
p1
1
t1
.
.p
p2
p
.p
...
p1
.
2
t1
.
.
p1
p2
p1
.
.
2
t1
p2
p1
.
59
EPUSP
Execução das Redes de Petri
..
t1
2
.
.
t1
2
...
2
2
t2
t2
p1
.
.
p3
t1
.
p2
t2
p2
t2
p2
p4
p1
p3
.
t1
.
p2
p4
p1
p3
.
t1
t2
p2
p4
p2
60
EPUSP
Execução das Redes de Petri
Flexibilidade do Modelamento po RPs
As marcas mudam de significado físico ao se
movimentarem pela RP.
“parafuso”
.
“kit”
“kit em
montagem”
“subconjunto
montado”
“porca”
“arruela”
.
“chassi”
61
EPUSP
Execução das Redes de Petri
• Compartilhamento de processo em paralelo
p1
.
p2
.
p5
.
p6
p3
p4
p7
62
EPUSP
Variáveis de Estado
A variável de estado de uma RP de n posições é o vetor m
definido pela marcação da RP; m=[m(p1) m(p2) ... M(pn)].
O vetor de estado RP de n posições é de dimensão n e é
discreto em amplitude, isto é, pertence ao In.
m'(pi)=m(pi) - w(pi, tj) + w(tk, pi),
para j tal que tj p•i
e k tal que tk •pi
Evolução de uma Rede de Petri
Condições iniciais (1 0 0 2 1) que habilitam simultaneamente t1, t3
e t4;
Três diferentes seqüências de execução, levam a uma mesma
marcação (0 1 2 3 1). Portanto não há conflito do tipo confusão.
63
EPUSP
Classes e Propriedades das Redes de Petri
•Grafos marcados ou grafos de eventos: Rede de Petri
ordinária em que cada posição tem exatamente uma transição
de entrada e uma de saída:
•p = p• = 1
pp•
•Máquinas de Estado: Rede de Petri ordinária em que cada
transição tem exatamente uma posição de entrada (cardinalidade
do pré-set igual a 1) e uma posição de saída (cardinalidade do
pós-set igual a 1):
•t =t• = 1
t T
64
EPUSP
Alcançabilidade
O estado x é alcançável a partir de um dado estado x0,
se x pode resultar de uma ou mais transições executadas
a partir de x0.
O conjunto de todos os estados alcançáveis a partir de x0
é o conjunto de alcançabilidade R (x0).
Na RP da Figura abaixo, x0 = [10]; x = [01] é alcançável
de x0, via t1 ; [01] é alcançável via execução de t3
65
EPUSP
Propriedades das Redes de Petri
Limitação
Uma posição p P de uma RP, (P, T, A, W, x0), é dita k-limitada se
x(p) k para todas as marcações subseqüentes a x0.
Se todas as posições de uma RP são k-limitadas, então a rede é klimitada.
Uma RP é segura (safe) se ela é k-limitadas com k = 1
Conservação
Soma total das marcas permanece constante na sua execução é dita
conservativa.
Vivacidade e Conflito Mortal
Uma transição é viva, dado um estado inicial x0, se e somente se ela é
habilitada a partir de algum estado decorrente de x0.
Uma RP é viva, dado um estado inicial x0, se e somente se todas as
suas transições são vivas.
66
EPUSP
Análise pelas Matrizes de Incidência
e Equações de Estado
Recordando o que dissemos sobre a equação das RPs, tem-se:
a)
a execução de uma transição tj numa RP de n posições (P, T,
A, W, x0) ocorre se e somente se a marcação x (pi) peso do
arco w(pi , tj), para pi pré-set de tj.
b)
a marcação x de cada posição ´pi é alterada para x', pela
execução de tj; algebricamente, pode-se escrever para pi
P,
x'(pi)
= x (pi) - w(pi , tj)
(se pi pré-set de tj)
= x (pi) + w(tj ,pi)
(se pi pós-set de tj)
= x (pi) nos outros casos,
em que
w(pi , tj) são os pesos dos arcos de pi a tj, em que pi são as
posições do pré-set de tj , e
w(tj , pi ) são os pesos dos arcos de tj a pi, em que pi são as
posições do pós-set de tj.
Ver figura abaixo:
67
EPUSP
A matriz de incidência de uma Rede de Petri, de n posições
e m transições, é a matriz n x m,
A = [aij], de números inteiros aij, em que
aij = w(tj ,pi),
(para pi pós-set de tj)
aij = - w(pi , tj),
(para pi pré-set de tj)
aij = 0 se não existe arco algum entre pi e tj
Exemplo:
A matriz de incidência será dada por:
68
EPUSP
Análise por Simulação Digital
Visual Object Net ++
Rainer Drath, da Ilmenau University of
Technology, Ilmenau, Alemanha
Elementos
Transição T: é habilitada e disparada conforme as regras
usuais; pode receber a atribuição de um tempo fixo de atraso
de disparo.
Posição P: o número de marcas m aparece no interior do
círculo.
Arco: há 3 tipos de arco, o normal, o inibidor, e o de teste
estático ou de sinalização
(não permite transporte de
marcas).
69
EPUSP
Análise por Simulação Digital
Visual Object Net ++
Programação
Tela de Desenvolvimento:
70
EPUSP
Análise por Simulação Digital
Visual Object Net ++
Programação
Simulação
-Start na barra superior da tela
-Na barra Extras as seguintes opções são disponibilizadas:
-Conflict Groups: mostra os conflitos, caso existam.
-Enabled D-Transitions: mostra as transições discretas
habilitadas.
-Enabled C-Transitions: mostra as transições contínuas
habilitadas.
71
EPUSP
Análise por Simulação Digital
Visual Object Net ++
Programação
Simulação
-Start na barra superior da tela
-Na barra Panel as seguintes opções são disponibilizadas:
-Passo a Passo
-Até o Próximo Evento
-Automática: Neste caso, a velocidade é ajustável
-Max-speed: maior velocidade possível de simulação,
porém a animação gráfica é suprimida.
72
EPUSP
Análise por Simulação Digital
Visual Object Net ++
Programação
Simulação
-Start na barra superior da tela
-Na barra Properties as seguintes opções são disponibilizadas:
-Show Animations: exibir animações.
-Show Time: exibir o tempo real no mostrador inferior.
-Auto Stop After Time: simulação para após o tempo
estipulado no mostrador.
73
EPUSP
Análise por Simulação Digital
Visual Object Net ++
Exemplo: Um processo de produção e inspeção com
retrabalho das peças defeituosas.
74
EPUSP
Processos de Modelamento
1) Processo por Agrupamento - Botton-up
- reunião gradual de sub redes representativas de partes
do sistema.
Objetivo: - redes para descrever subsistemas simples
- são agrupados formando o modelo final
A) Estoque intermediário limitado (buffer)
entre máquinas A e B.
pB possui no máximo K elementos.
A
tA
pB
tB
K
pV
75
EPUSP
B) Estoque intermediário (buffer)comando pela
máquina B
A
tA
pB
tB
B
tC
K
PV
Puf
Quando B fica livre, “puxa” uma peça de pB.
O número máximo de peças do buffer intermediário é
K.
Nesta configuração tA < tB (condição para o buffer).
Observar que, se o buffer estiver cheio (pB=K) e
existir uma peça em A, a transição tA não é executada.
76
EPUSP
Execução de tA:
A
tA
pB
tB
B
tC
9
Execução de tC:
A
tA
pB
tB
B
tC
9
Puf
PV
Execução de tB:
A
tA
pB
tB
B
10
PV
tC
77
Puf
EPUSP
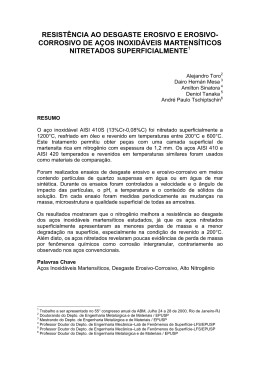
C) Overflow
Objetivo é interromper as atividades da máquina A
quando o buffer está cheio.
Os arcos e transições adicionados simulam um
intertravamento da máquina A através de um sensor de
overflow.
Exemplo: Empilhamento máximo de 4 peças
Peça
S1 atuado
Peça
Peça
Equip
A
Peça
Equip
B
Equip
C
parado
78
EPUSP
D) Buffer First-in / First-out
79
EPUSP
O Buffer First-in / First-out mais encontrado é a
esteira.
Equip
A
Equip
B
80
EPUSP
E) Recursos compartilhados com sincronização:
Objetivos: Simulação de uma máquina que atende a duas
linhas de produção ou duas atividades. T1 e t2 pertencem à
rotina de sincronização.
1)
3)
5)
t1
t3
t5
t2
t4
t6
t1
t3
t5
t2
t4
t6
t1
t3
t5
t2
t4
t6
2)
4)
t1
t3
t5
t2
t4
t6
t1
t3
t5
t4
t6
t1
t3
t5
t2
t4
t6
t2
6)
81
EPUSP
F) Rede de escolha automática de servidor
Objetivo: Simulação de atendimento seqüencial
82
EPUSP
Exemplo: Atendimento bancário com 3 caixas.
2)
10
9
3)
8
4)
7
2
83
EPUSP
2) Processo por Refinamento - Top-down
- detalhamento gradual de redes por meio da
substituição de transições ou posições por
subredes
Refinamento de Transições
A) Bloco: é uma RP (P, T, A, W, X0) com uma
transição de entrada ti e outra de saída tf.
B) Rede associada ao bloco: é formada pela adição
de uma posição p0 “em realimentação”, de tf para ti,
tendo po uma marca inicial.
C) Bloco bem formado: quando a rede associada é
viva
Quando uma transição de uma RP qualquer é
substituída por um bloco bem-formado, a RP
resultante será limitada, segura ou viva se e
somente se a RP original for, respectivamente,
limitada, segura ou viva.
84
EPUSP
Refinamento de posições
A) módulo seqüência e módulo paralelo
B) módulo de exclusão mútua
“Se uma posição p de uma rede VST (viva,
segura e reversível) é substituída por um dos
módulos acima, com as marcações iniciais
acima, a RP resultante também é VSR.”
85
EPUSP
Algoritmo para Modelamento Top-down
Passo 1. Escolha uma RP VSR para o sistema a eventos, pelo
esquema da figura abaixo. As posições marcadas inicialmente
são de recursos. As não-marcadas são subsistemas que
operam concorrencialmente, isto é, em paralelo. As transições
são início e fim do processo.
Passo 2. Substitua as posições de operação (marcas podem
ser nulas) por módulos básicos, até que o detalhamento esteja
suficiente. Em cada estágio de substituição, adicione as
posições de recursos que forem necessárias, conforme a última
propriedade enunciada acima.
Passo 3. Elimine as posições redundantes eventualmente
existentes.
86
EPUSP
Simulação em Redes de Petri e Programação
Ladder
A seguir são exemplificadas duas maneiras de
transformação de uma rede de Petri em linguagem
de programação ladder.
Em b, apresenta-se a implementação com sinais de
saída não retentivos. Em c, são utilizados os sinais
de Set/Reset.
87
EPUSP
Representação de Redes de Petri em
Linguagem de Programação Ladder
• A seguir encontram-se as rotinas mais
comuns utilizadas em Redes de Petri e sua
transformação em Lógica Ladder.
• Lógica E
Se A=1 e B=1 e C=1,
Então D=1.
A
B
C
A
B
C
D
D
• Lógica OU
Se A=1 ou B=1 ou C=1,
Então D=1.
A
B
C
A
D
B
C
D
88
Representação de Redes de Petri em
Linguagem de Programação Ladder
EPUSP
• Concorrência
Se A=1 e B=1,
Então C=1 e D=1 e E=1.
A
A
B
B
C
D
E
C
D
E
• Atraso
Se A=1,
Então após segundos B=1.
A
A
Timer
B
Timer.Done
C
89
EPUSP
Representação de Redes de Petri em
Linguagem de Programação Ladder
• Sincronização
Se A=1,
Então após 1 segundos D=1.
Se B=1 e C=1,
Então após 2 segundos E=1.
Se D=1 e E=1,
Então após 3 segundos F=1.
A
B
A
C
D
E
Timer1
Timer1.Done
B
C
Timer2
F
D
Timer2.Done
D
E
E
Timer3
Timer3.Done
F
90
EPUSP
Representação de Redes de Petri em
Linguagem de Programação Ladder
A seguir são exemplificadas duas maneiras de
transformação de uma rede de Petri em linguagem
de programação ladder.
Em b, apresenta-se a implementação com sinais de
saída não retentivos. Em c, são utilizados os sinais
de Set/Reset.
A
B
C
D
E
F
91
Baixar