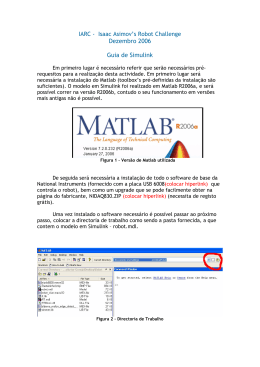
IMPLEMENTAR NO HP-SIM (INCLUIR DELAYS PARA A EXECUÇÂO DAS DIFERENTES OPERAÇÕES) A Figura 1 ilustra uma célula flexível de fabrico. Os produtos por processar estão disponíveis em Stock_1. Os produtos finalizados são colocados em Stock_2. Stop 2 Maq_1 Maq_2 AGV Buff_in Buff_out Robot 3 Robot 2 Robot 1 Stop 3 Stop 1 Robot 4 Stock_2 Stock_1 Figura 1 Os produtos a processar são colocados em Buff_In (capacidade 5) por Robot_2. Os produtos deverão ser processados em Maq_1 ou em Maq_2 (indiferentemente). Maq_1 e Maq_2 têm capacidade 1. Após processados, os produtos deverão ser colocados em Buff_Out (capacidade 5). As operações de transporte entre Buff_In e Maq_1 e Maq_2 e entre Maq_1 ou Maq_2 e Buff_Out são feitas por Robot_1. Um AGV (Automatic Guided Vehicle) executa um percurso circular composto de três movimentos: Pos_1 → Pos_2 (pára em Stop_2); Pos_2 → Pos_3 (pára em Stop_3); Pos_3 → Pos_1 (pára em Stop_1). O AGV pode transportar 1 componente por processar (P1) e 1 componente processado (P2). Pode transportar simultaneamente 1 P1 e 1 P2. Quando o AGV chega a Stop_1, se transportar um P2 e o Stock_2 ainda tem capacidade, deverá ser feita uma operação de transporte (por Robot_4) de P2 do AGV para Stock_2. Se não transportar P1, deverá ser feita uma operação de transporte (por Robot_4) de Stock_1 para o AGV. Se não houver P2 nem P1 e Stock_1 está vazio, não deve ser feita nenhuma operação de transporte (por Robot_4) e o AGV deverá partir logo para Stop_2. Quando chega a Stop_2, se o AGV transportar um P1 e Buff_In tiver capacidade, deverá ser feita a operação de transporte (por Robot_2) de P1 para Buff_In, caso contrário, o AGV deverá seguir para Stop_3. Em Stop_3, se o AGV não transporta P2 e Buff_Out não vazio, deverá ser feita a operação de transporte (por Robot_3) de P2 de Buff_Out para o AGV. Caso contrário, o AGV deverá seguir logo para Stop_1.
Download