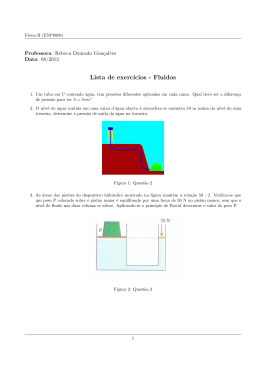
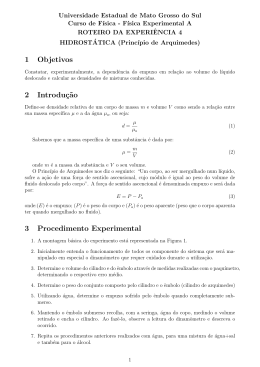
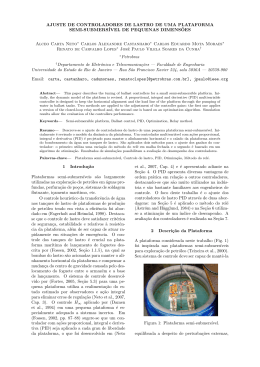
MODELAGEM DA DINÂMICA E EXPERIMENTOS COM UMA PLATAFORMA SEMI-SUBMERSÍVEL EM ESCALA REDUZIDA Rafael Monteiro Fortes∗, José Paulo Vilela Soares da Cunha∗ Departamento de Eletrônica e Telecomunicações — Faculdade de Engenharia Universidade do Estado do Rio de Janeiro — Rua São Francisco Xavier 524, sala 5036A — 20559-900 ∗ Emails: [email protected], [email protected] Abstract— This paper describes the dynamic model and the control of a reduced scale semi-submersible platform. The control objective is to keep the horizontal alignment and the load line of the platform through the pumping of water in ballast tanks. The dynamic parameters of the platform were identified experimentally. These parameters are needed for the development of the controller. The dynamic model and the performance of the control are verified experimentally. The instrumentation applied in the experiments is also described. Semi-submersible platform, Ballast control, Dynamic model, Identification. Keywords— Resumo— Descreve-se o modelo da dinâmica e o controle de uma plataforma semi-submersı́vel em escala reduzida. O objetivo do controle é manter o alinhamento horizontal e o calado da plataforma através do bombeamento da água nos tanques de lastro. Foram realizados experimentos para a identificação dos parâmetros dinâmicos da plataforma usados no desenvolvimento do controlador. O modelo da dinâmica e o desempenho do controle são verificados experimentalmente. Também é descrita a instrumentação utilizada nos experimentos. Palavras-chave— 1 Plataforma semi-submersı́vel, Controle de lastro, Modelo dinâmico, Identificação. Introdução Plataformas semi-submersı́veis são muito utilizadas na exploração de petróleo em grandes lâminas de água. Esse tipo de plataforma também é comumente usado em sistemas de soldagem flutuante, içamento marı́timo, perfuração de poços, etc. Do ponto de vista da teoria de controle, as plataformas semi-submersı́veis são exemplos de sistemas não-lineares e multivariáveis continuamente expostos a perturbações estocásticas (Jordán and Duga, 1998). O trabalho de Fagerholt and Heimdal (1998) aborda o controle heurı́stico da transferência de água nos tanques de lastro de plataformas de produção de petróleo tendo em vista a eficiência. Destaca-se que o controle de lastro deve satisfazer critérios de segurança, estabilidade e relativos à resistência da plataforma, além de ser capaz de atuar rapidamente em situações de emergência. O controle dos tanques de lastro é crucial na plataforma marı́tima de lançamento de foguetes descrita por Fossen (2002, Seção 1.1.5), na qual as bombas do lastro são acionadas para manter o alinhamento horizontal da plataforma para compensar a mudança do centro de gravidade causada pelo deslocamento do foguete entre o armazém e a base de lançamento. Em vez de atuar no volume do lastro, outra alternativa é mover verticalmente os flutuadores, conforme é realizado por Damen et al. (1994). O modelo desenvolvido por Jordán and Duga (1998) é bastante complexo, acoplado e mais adequado à simulação da plataforma. A abordagem de Fossen (2002, Seção 3.2.4) é adequada ao desenvolvimento de controladores multivariáveis de lastro. Na Seção 6 deste texto, a dinâmica de cada grau de liberdade de interesse é modelada separadamente, tendo-se em vista o desenvolvimento de controladores descentralizados para a plataforma na Seção 7. As Seções 2 a 5, a seguir, descrevem a plataforma e a sua instrumentação. 2 Descrição da Plataforma A plataforma utilizada neste trabalho (Fig. 1) foi inspirada nas plataformas semi-submersı́veis para exploração de petróleo (Teixeira et al., 2000). Seu sistema de controle deve ser capaz de mantê-la equilibrada a despeito de perturbações externas, respeitando-se os limites disponı́veis para o controle. Modificações na distribuição de pesos na plataforma serão compensadas através de quatro tanques de lastro localizados nos vértices inferiores da plataforma (Fig. 3). Cada tanque é acoplado a duas bombas, sendo uma de injeção de água e a outra de retirada de água, que captam e expelem água na parte inferior dos flutuadores. Figura 1: Plataforma semi-submersı́vel. Na parte superior da plataforma são fixados os drivers para os motores, os circuitos de condicionamento de sinais, dois pêndulos para medir as inclinações da plataforma e um transdutor para medir a profundidade de penetração da plataforma na água, i.e., calado. Assim, este é um sistema multivariável com quatro entradas (controles para as bombas) e três saı́das (ângulo de arfagem, ângulo de jogo e calado) a serem controladas. A Fig. 2 apresenta o diagrama de blocos do sistema eletrônico desenvolvido. Os sinais dos transdutores passam por um condicionador que envia os sinais tratados ao conversor A/D. O microcomputador processa estes dados para gerar os comandos das bombas, que são enviados através de uma porta digital paralela aos drivers de potência que acionam os motores. φ ye y z ze xe 2 θ as x mb Bo 4 1 s ba m Bo φ − ângulo de jogo (roll) 3 θ − ângulo de arfagem (pitch) Figura 3: Sistemas de coordenadas usados na modelagem da dinâmica da plataforma. Os tanques de lastro estão numerados. Placa de aquisição de dados Microcomputador (controle e monitoração) A/D Condicionador Transdutores de sinais Saídas digitais Acionador dos motores Bombas de água Plataforma semi−submersível Figura 2: Diagrama das conexões eletrônicas. Os sistemas de coordenadas, notações e nomenclaturas utilizadas neste projeto seguem os usuais na área naval. Os graus de liberdade da plataforma que podem ser controlados independentemente pelos atuadores são: arfagem (pitch, ângulo θ), jogo (roll, ângulo φ) e o movimento de subida e descida (heave) (Fossen, 2002, p. 17). A Fig. 3 ilustra os sistemas de coordenadas adotados. Os eixos de coordenadas inerciais xe , ye e ze estão posicionados arbitrariamente no centro do plano superior da plataforma. Os eixos x e y são fixos ao plano superior da plataforma. A posição vertical é o calado da plataforma (h), que é a distância entre o fundo dos flutuadores e a linha de água, projetada ao longo do eixo vertical (ze ). Quando todos os tanques de lastro possuem os mesmos nı́veis de água e a plataforma está na horizontal, o centro de gravidade e o centro de flutuação estão alinhados paralelamente ao eixo z. Assume-se que a plataforma não translada no plano horizontal nem gira em torno do eixo vertical, para simplificar a modelagem. 3 Instrumentação para Medição de Nı́vel Para realizar o controle e a monitoração da plataforma, são medidos o nı́vel da água em cada tanque de lastro e o calado da plataforma. No centro de cada tanque está instalado um transdutor de nı́vel. Há ainda dois transdutores, um que mede o nı́vel da plataforma em relação à linha de água e o outro, denominado transdutor de referência, mede a condutividade da água. Esses são fixados pendularmente por um fio ao centro da parte superior da plataforma para reduzir erros devidos à inclinação. A saı́da do transdutor passa por um circuito condicionador de sinais, que transforma o sinal de corrente alternada em um sinal de tensão proporcional ao nı́vel de água, que é digitalizado por um conversor A/D, c.f. Fig. 4. Cada transdutor de nı́vel foi construı́do com dois Condicionador de sinais A/D Computador Transdutor de nível Figura 4: Diagrama da medição de nı́vel de água. arames de aço inoxidável e cromo, dispostos paralelamente e separados por uma pequena distância. São ligados em série com um gerador de tensão alternada, escolhida por evitar a formação de gases resultantes da eletrólise que alterariam a medição. A Fig. 5 exibe o sensor de calado e o sensor de referência, que são postos juntos e compartilham o eletrodo que é polarizado pelo sinal alternado. Os arames são fixados por isoladores elétricos a uma moldura em alumı́nio, com um peso na parte inferior que mantém o alinhamento vertical. A condutância desses transdutores é diretamente proporcional ao nı́vel de água e à condutividade da água. Esta última depende da temperatura e de ı́ons presentes na água. O transdutor de referência mede a condutividade da água, que é usada pelo computador no cálculo dos nı́veis, que se tornam imunes a variações na condutividade (Fortes, 2005, Seção 2.2.5). 4 Transdutores de Inclinação Os sensores de inclinação são dois pêndulos posicionados ortogonalmente no topo da plataforma, Régua Fixação à plataforma Fio de suspensão Moldura metálica aterrada Eletrodo sensor de calado da plataforma Eletrodo de polarização Eletrodo de referência Lastro em chumbo Figura 5: Diagrama do transdutor do calado. próximos ao seu centro. Cada sensor é construı́do com um potenciômetro de filme plástico condutivo para servomecanismos acoplado a um pêndulo de chumbo. O centro de gravidade do pêndulo está bem próximo do eixo do potenciômetro, com o intuito de diminuir oscilações indesejáveis que podem ser excitadas por movimentos rápidos da plataforma. Notou-se que a freqüência de oscilação dos pêndulos, cerca de 1, 25 Hz, pode prejudicar a medição, pois está dentro do espectro do movimento da plataforma. Outro problema é o atrito seco que prejudica a precisão das medidas. Por isso, foram avaliadas alternativas para melhorar as medições angulares. Uma opção é o uso de uma unidade de medição inercial, que foi descartada por ser muito onerosa. Outra alternativa é o sensor eletrolı́tico de inclinação que utiliza um pequeno recipiente com fluido e cinco eletrodos (Savaresi et al., 2004). Esses sensores eletrolı́ticos foram descartados pois são de difı́cil aquisição e possuem banda passante estreita (1 Hz). 5 Acionamento das Bombas de Água 6.1 Modelo das bombas de água As bombas, uma para encher e outra para esvaziar cada tanque, são modeladas como um ganho aplicado ao seu sinal de controle. O sinal de controle −1 corresponde à máxima vazão de saı́da de água, +1 corresponde à máxima vazão de entrada e 0 implica o desligamento de ambas as bombas. Devido a diferenças de conexão das bombas e dispersão paramétrica, as suas vazões são um pouco diferentes, resultando no modelo linear por partes: se Uj (t) ≥ 1 , Kinj , K U (t) , se 0 ≤ U (t) < 1 , j inj j Vj (t) = (1) K U (t) , se − 1 < Uj (t) < 0 , out j j −Koutj , se Uj (t) ≤ −1 , onde Vj é a vazão de água (m3 /s), Kinj é a vazão máxima da bomba de entrada (m3 /s), Koutj é a vazão máxima da bomba de saı́da (m3 /s) e j é o número do tanque de lastro, c.f. Fig. 3. 6.2 Modelo dos tanques de lastro Os tanques são modelados como integradores da vazão de água: 1 dlj (t) = Vj (t) , dt Sbl mj (t) = ρSbl lj (t) , (2) onde lj é o nı́vel da água no j-ésimo tanque (m), Sbl é a área da base do tanque de lastro (0, 01 m2 ), Vj é a vazão dada por (1), ρ é a massa especı́fica da água (1000 kg/m3 ) e mj é a massa da água no j-ésimo tanque (kg). Devem ser incluı́das saturações no integrador para representar os nı́veis máximo e mı́nimo da água no tanque. Para calibrar este modelo, foram aplicados degraus unitários nos comandos das bombas, resultando nos nı́veis medidos na Fig. 6. Testes 90 6 Modelagem da Dinâmica A modelagem da dinâmica da plataforma tem em vista o projeto e a simulação do sistema de controle. Neste trabalho, o modelo é essencial no projeto de observadores do estado da plataforma. 80 70 Nível (mm) O acionamento de cada motor é realizado por um driver composto por um transistor de potência comandado por um bit da porta digital paralela, vide Fig. 2. O transistor atua como uma chave comandada por um modulador de largura de pulso (pulse width modulation — PWM) para se obter vazões intermediárias das bombas. A modulação foi realizada por software no computador, que também realiza uma lógica de intertravamento que evita o transbordamento dos tanques, reduz o desgaste das bombas e facilita a operação da plataforma (Fortes, 2005, Seção 3.2). 60 50 40 Lastro 4 Lastro 3 Lastro 2 Lastro 1 30 20 10 0 0 5 10 15 20 25 30 35 40 t (s) Figura 6: Nı́veis nos tanques de lastro quando são aplicados degraus unitários para enchê-los a partir de t = 2 s. análogos foram realizados esvaziando-se os tanques (Fortes, 2005, Seção 4.1.3). A partir desses testes foram computados os ganhos das bombas no modelo (1): Kinj = 22 × 10−6 m3 /s e Koutj = 21×10−6 m3 /s. Neste modelo foram feitas as seguintes simplificações coerentes com os experimentos: (i) os tanques são mantidos horizontalmente (θ ≈ 0◦ e φ ≈ 0◦ ), o que é razoável em operações usuais da plataforma; (ii) desprezou-se um pequeno fluxo de água que passa pelas bombas quando estão desligadas; (iii) a dinâmica das bombas de água é muito rápida. 6.3 Modelo do grau de liberdade vertical O grau de liberdade vertical é modelado pela equação dinâmica com arraste quadrático [m(t) + A33 ]ḧ(t)+Cdh |ḣ(t)|ḣ(t)+2ρSbf g h(t) 6.4 Modelo da arfagem e do jogo A arfagem e o jogo podem ser modelados de forma semelhante ao movimento vertical, substituindose as massas por momentos de inércia e as forças pelos torques correspondentes. O sinal de excitação é o torque gerado pelo desbalanceamento dos pesos da água nos tanques de lastro. Além dessas diferenças, os experimentos indicaram que o modelo mais adequado para o arraste é linear, pois os transitórios são exponenciais, e.g., Fig. 8. Assim, o grau de liberdade da arfagem é modelado pela equação dinâmica linear: = g m(t) , (3) m(t) = mP +m1 (t)+m2 (t)+m3 (t)+m4 (t) , (4) Jy θ̈(t) + Cdθ θ̇(t) + Kθ θ(t) = dx g∆mθ (t) , (5) ∆mθ (t) = m2 (t) + m4 (t) − m1 (t) − m3 (t) , (6) onde h é o calado da plataforma (m), m é a massa total (kg), mP é a massa da plataforma seca (5, 2 kg), Cdh é o coeficiente de arraste vertical dos flutuadores na água (kg/m); Sbf é a área da base de cada um dos dois flutuadores (0, 04 m2 ); g é a aceleração da gravidade (9, 81 m/s2 ). Os termos da eq. (3) são as forças: inercial, arraste, empuxo e peso, respectivamente. A massa adicional A33 representa a componente vertical das forças inerciais induzidas pela pressão resultante do movimento harmônico da plataforma na água (Fossen, 2002, p. 65). Neste modelo admitiramse as seguintes simplificações: (i) as inclinações da plataforma são mantidas pequenas (θ ≈ 0◦ e ḣ φ ≈ 0◦ ); (ii) dm dt = ṁḣ+mḧ ≈ mḧ, uma vez que a variação da massa do lastro é lenta. A Fig. 7 exibe o movimento da plataforma ao ser solta da superfı́cie da água (h(0) = 0 m). O nı́vel da água nos tanques de lastro foi mantido constante em 10 mm durante o experimento por controladores proporcionais. O coeficiente de arraste (Cdh = 130 kg/m) e a massa adicional (A33 = 2, 4 kg) foram ajustados para que o comportamento simulado se assemelhe ao experimental. Na simulação, foi adicionado um sinal de entrada à eq. (3) para modelar a redução gradual da força que sustenta a plataforma em 0 ≤ t ≤ 0, 3 s. Nota-se na Fig. 7 que as medidas sofrem interferência das ondas na superfı́cie da água. onde Jy é o momento de inércia da plataforma para o eixo y (kg m2 ) que incorpora a massa adicional deste grau de liberdade, θ é o ângulo de arfagem (rad), Cdθ é o coeficiente de arraste (kg m2 /s), Kθ é o coeficiente do torque restaurador da arfagem (kg m2 /s2 ), dx é a projeção da linha que liga o centro do tanque ao centro da plataforma sobre o eixo x (0, 15 m). O modelo do grau de liberdade do jogo é análogo a este. As principais simplificações assumidas neste modelo são: (i) os movimentos dos graus de liberdade são pequenos e desacoplados, (ii) as variações de momentos de inércia Jx e Jy causadas pelas massas da água nos tanques foram desprezadas, (iii) os parâmetros independem da profundidade h. Para determinar os parâmetros dos modelos da arfagem e do jogo, foram realizados experimentos de dois tipos: (1) no primeiro, a plataforma foi inclinada manualmente e, após ser largada, seu movimento foi registrado; (2) no segundo, os nı́veis da água em dois dos quatro tanques são modificados para gerar uma pequena inclinação. A Fig. 8 exibe o movimento da arfagem quando é estabelecido o ângulo de partida de −8◦ . Todos os nı́veis da água nos tanques de lastro fo- 4 Arfagem (graus) Resultado experimental Resultado experimental 2 0 −2 Resultado simulado −4 −6 Calado (mm) 100 90 80 70 60 50 40 30 20 10 0 6 −8 0 1 2 3 t (s) 4 5 6 7 Resultado simulado Figura 8: Movimento de arfagem quando a plataforma é largada com −8◦ de inclinação inicial. 0 1 2 3 4 5 6 t (s) Figura 7: Movimento vertical da plataforma ao ser solta da superfı́cie da água. ram mantidos iguais a 10 mm, o que resulta em ∆mθ (t) ≡ 0 kg. Neste primeiro teste, ajusta-se p a freqüência natural ωnθ = Kθ /Jy e o fator de amortecimento ζθ = Cdθ (2Jy ωnθ )−1 do modelo (5), seguindo-se (Ogata, 1997, Seção 4-3). Nota-se que o overshoot obtido na simulação (≈ 2, 5◦ ) é menor que o experimental (≈ 5◦ ), o que é causado, em parte, pelas oscilações do pêndulo induzidas pelo balanço rápido da plataforma. A Fig. 9 apresenta o deslocamento gerado pela mudança do nı́vel dos tanques de lastro 1 e 3 de 10 mm para 13 mm iniciada em t = 0, 7 s, mantendo-se o nı́vel dos demais tanques em 10 mm. Para melhorar as medições, as oscilações do pêndulo foram atenuadas pela redução da velocidade do movimento. Isto foi obtido através da diminuição da tensão aplicada aos motores de 13, 8 V para 8 V , o que reduz a vazão dada por (1), que é multiplicada por 8/13, 8. Este experimento permite medir o ganho DC da equação (5), dado por dx g/Kθ = limt→+∞ θ(t)/∆mθ (t), do qual se calcula o coeficiente Kθ . Usando-se esta metodo1 Arfagem (graus) 0 −1 −2 Resultado experimental −3 −4 −5 −6 −7 Resultado simulado 0 1 2 3 4 5 6 7 8 9 10 t (s) Figura 9: Movimento de arfagem quando os nı́veis dos tanques de lastro 1 e 3 são modificados de 10 mm para 13 mm. logia, foram obtidos os valores dos coeficientes dos modelos de ambos os graus de liberdade, sumarizados na Tabela 1. São percebidas as diferenças Tabela 1: Parâmetros do jogo e da arfagem. Grau de Liberdade Constante Valor Unidade Arfagem Jy Kθ Cdθ ωnθ ζθ 0,22 0,88 0,3 2,0 0,34 kg m2 kg m2 /s2 kg m2 /s rad/s — Jx Kφ Cdφ ωnφ ζφ 0,38 8,4 0,6 4,7 0,17 kg m2 kg m2 /s2 kg m2 /s rad/s — Jogo entre os graus de liberdade que são causadas pela disposição dos flutuadores (vide Fig. 3), o que se reflete nas freqüências naturais e no fator de amortecimento. De fato, notou-se que a plataforma tomba mais facilmente quando se desbalanceia a arfagem do que quando o jogo é desbalanceado. 7 Controle O objetivo do controle é regular as variáveis de saı́da h, θ e φ através da atuação em quatro conjuntos de bombas de lastro. A dinâmica de cada tanque de lastro (2) é representada por um integrador. Pode-se mostrar, que um dos quatro autovalores na origem correspondentes a esta dinâmica não é observável a partir dos sinais h, θ e φ, o que poderia instabilizar o sistema de controle que fosse baseado apenas na realimentação dos sinais de saı́da. Para contornar este problema, são utilizados controladores de nı́vel proporcionais para estabilizar a dinâmica dos tanques de lastro: ¡ ¢ (7) Uj = Kpl Ūj − lj , j = 1, . . . , 4 , onde Ūj é o sinal de referência para o controlador do j-ésimo tanque. O valor do ganho proporcional (Kpl = 500) foi ajustado experimentalmente para se obter uma resposta rápida e livre de oscilações causadas por atrasos não modelados. O sinal de controle do calado h deve atuar igualmente em todos os tanques, mas os sinais de controle de θ e φ precisam sofrer inversões de sinais pois, para inclinar a plataforma sem alterar o calado é necessário que dois tanques encham enquanto os outros esvaziam. A conjugação desses controles é realizada pela transformação 1 1 −1 1 1 1 ū = Wm u , Wm = (8) 1 −1 −1 , 1 −1 1 do vetor u = [uh , uφ , uθ ]T (sinais de controle de cada grau de liberdade) no vetor ū = [Ū1 , Ū2 , Ū3 , Ū4 ]T (sinais de referência para os controladores de lastro). O sistema de controle da plataforma na Fig. 10 utiliza realimentação de estado e ação integral, que elimina erros de regulação (Fortes, 2005, Seção 5.3). Há uma entrada de uh href Controladores por realimentação de uθ estado e ação integral uφ . . φ θ . h U1 U1 Controladores U2 U3 de nível U3 U4 dos lastros U4 U2 Desacoplador h Plataforma θ semi−submersível φ l1 l2 l3 l4 Observadores das velocidades Figura 10: Diagrama do sistema de controle. referência para o ajuste do calado (href ). Uma vez que as velocidades ḣ, θ̇ e φ̇ não são medidas, foram utilizados observadores (Ogata, 1997) para estimá-las a partir das medidas h, θ, φ e dos nı́veis de lastro (lj ). Assim evitou-se o uso de derivadores, pois teriam menor imunidade a ruı́dos e gerariam atrasos. Os observadores foram projetados com base nos modelos (3)–(6). O desacoplamento proporcionado por (8) permite projetar um controlador e um observador para cada grau de liberdade independentemente dos demais graus. A Fig. 11 exibe o movimento vertical quando a referência do controlador é href ≡ 90 mm. Observam-se oscilações indesejáveis com amplitudes inferiores a 0, 5 mm, que podem estar sendo induzidas por pequenas ondas geradas na superfı́cie da água pelo movimento da plataforma. A 91 Calado (mm) Referência 90 89 88 0 1 2 t (s) 3 4 5 Figura 11: Calado da plataforma regulado pelo sistema de controle. Fig. 12 exibe o movimento de arfagem da plataforma quando perturbada por uma massa de 75 g posta sobre um dos tanques de lastro em t ≥ 5 s. O controle elimina o efeito desta perturbação em cerca de 30 s. Ambos os experimentos indicam que o controle desenvolvido é adequado. Arfagem (graus) Referência −1 Os autores agradecem ao Prof. Bernardo Severo da Silva Filho e aos projetistas da plataforma, Teixeira et al. (2000). Este trabalho foi parcialmente financiado pela Faperj e pelo CNPq. Referências Damen, A. A. H., Falkus, H. M. and Bouwels, J. P. H. M. (1994). Modeling and control of a floating platform, IEEE Trans. Aut. Contr. 39(5): 1075–1078. −2 −3 −4 Fagerholt, K. and Heimdal, S. I. (1998). Algorithms for effective transfer of ballast for an oil installation, J. Operational Research Soc. 49(1): 16–22. −5 −6 Agradecimentos Cunha, J. P. V. S., Costa, R. R. and Hsu, L. (1995). Design of a high performance variable structure position control of ROV’s, IEEE J. Oceanic Eng. 20(1): 42– 55. 1 0 tuição dos pêndulos por sensores mais adequados. No entanto, os pêndulos permitiram a boa regulação desses ângulos no sistema em malha fechada. Deve-se lembrar que os parâmetros concentrados não podem reproduzir fielmente os fenômenos hidrodinâmicos que seriam melhor modelados por parâmetros distribuı́dos. No entanto, o modelo com parâmetros concentrados é conveniente para simplificar o desenvolvimento do sistema de controle. O ajuste dos parâmetros do controlador depende da identificação dos parâmetros da plataforma, que usou testes que seriam caros e difı́ceis de serem executados numa plataforma com tamanho real. Isso indica que deveriam ser desenvolvidas técnicas de identificação de parâmetros utilizando dados normais de operação. Além disso, seria interessante aplicar técnicas de controle robustas a incertezas e perturbações neste sistema, e.g., o controle H∞ (Damen et al., 1994) ou o controle a estrutura variável (Cunha et al., 1995). 0 5 10 15 20 t (s) 25 30 35 Figura 12: Resposta do controle do ângulo de arfagem quando perturbado por uma massa de 75 gramas posta sobre um dos tanques de lastro. 8 Conclusões Descreveu-se a instrumentação, a modelagem e o controle desenvolvidos por Fortes (2005) para a plataforma semi-submersı́vel em escala reduzida construı́da por Teixeira et al. (2000). Alguns valores de parâmetros utilizados no modelo são obtidos diretamente das dimensões da plataforma, e.g., áreas e distâncias. Os momentos de inércia e os parâmetros hidrodinâmicos foram obtidos através do casamento de simulações com resultados de experimentos análogos. Para melhorar a determinação dos valores de alguns coeficientes, é necessário melhorar a medição dos ângulos de arfagem e de jogo, possivelmente através da substi- Fortes, R. M. (2005). Instrumentação, modelagem e controle de uma plataforma semi-submersı́vel em escala reduzida, Projeto de Graduação em Engenharia Eletrônica — UERJ, Rio de Janeiro. Disponı́vel em http://www.lee.eng.uerj.br/~jpaulo/PG/2005/ PG-Plataforma-Semi-Submersivel-2005.pdf. Fossen, T. I. (2002). Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs, and Underwater Vehicles, Marine Cybernetics, Trondheim, Norway. Jordán, M. A. and Duga, G. E. (1998). Nonlinear modeling of a moored floating platform in stochastic environment, Proc. American Contr. Conf., Philadelphia, pp. 1094–1098. Ogata, K. (1997). Modern Control Engineering, 3rd edn, Prentice-Hall. Savaresi, S. M., Previdi, F., Dester, A., Bittanti, S. and Ruggeri, A. (2004). Modeling, identification, and analysis of limit-cycling pitch and heave dynamics in an ROV, IEEE J. Oceanic Eng. 29(2): 407–417. Teixeira, J. L. P., Reis, L. G. and Feitosa, P. H. F. (2000). Sistema de controle de estabilização de uma plataforma flutuante por computador, Projeto de Graduação em Engenharia Eletrônica — UERJ, Rio de Janeiro.
Download