Instituto Politécnico de Setúbal
Engenharia Electrotécnica
Controlo
2.ª AULA
Representação gráfica de sinais –
Rampa unitária, Impulso unitário e
Escalão unitário
Docente
Prof.ª Sónia Marques
Instituto Politécnico de Setúbal - Controlo – 02/03
• 2ª aula
Representação gráfica de sinais – Rampa unitária, Impulso
unitário e Escalão unitário,
RAMPA UNITÁRIA
u(t)
1
t t ≥ 0
u( t ) =
0 t ≤ 0
0
t
Considere um sistema de 1ª ordem com a seguinte função de transferência
1
G( S ) =
Ts + 1
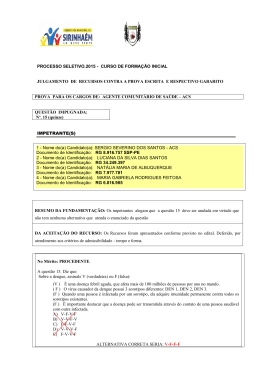
A resposta do sistema a uma rampa unitária de um sistema de 1ª ordem é dada pela
expressão, c ( t ) = t − T + Te
sistema.
−
t
T
t ≥ 0 onde T representa a constate de tempo do
Define-se em primeiro o tempo de 0 a 10 segundos de, depois a constante de tempo
por exemplo T=0.5 e por fim o gráfico pelo comando plot(x,y):
Define-se em primeiro o tempo de 0 a 10 segundos de 0.1 em 0.1, logo t=0:0.1:10,
» t=0:0.1:10;
»
depois a expressão matemática da resposta temporal para uma constantes de tempo,
T= 0.5,
» T=0.5;
»y= t-T+T*exp(-t/T);
»
e por fim o gráfico pelo comando plot(x,y) onde se coloca no mesmo gráfico a curva
de uma rampa unitária e a resposta do sistema c ( t ) = t − 0 .5 + 0 . 5 e
» plot(t,y,'m.',t,t)
»
Por Profª Sónia Marques
−
t
0 .5
t ≥0
2
Instituto Politécnico de Setúbal - Controlo – 02/03
10
9
u(t)=t
8
7
6
5
4
3
2
c(t)=t-T+T*exp(-t/T)
T=0.5
1
0
0
1
2
3
4
5
6
7
8
9
10
Vamos agora mostrar, variando a constante de tempo T que, quanto menor a constante
de tempo menor o erro estacionário. T=1, T=5, T=10
» T=1;
» y1= t-T+T*exp(-t/T);
» T=5;
» y2= t-T+T*exp(-t/T);
» T=10;
» y3= t-T+T*exp(-t/T);
» y4= t;
» plot(t, y1 , 'mo' , t , y2 , 'c.' , t , y3 , 'g*' , y4 , t , 'k+')
»
10
9
y = t-1+exp(-t)
y=t
8
y = t-5+5*exp(-t/5)
7
6
5
4
3
2
y = t-10+10*exp(-t/10)
1
0
0
1
2
3
Por Profª Sónia Marques
4
5
6
7
8
9
10
3
Instituto Politécnico de Setúbal - Controlo – 02/03
IMPULSO UNITÁRIO
u(t)
1 t = a
u( t ) =
0 t ≠ a
1
0
a
t
Considere um sistema de 1ª ordem com a seguinte função de transferência genérica,
1
G( S ) =
Ts + 1
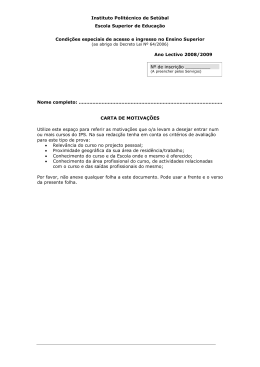
A resposta do sistema a um impulso unitário de um sistema de 1ª ordem é dada pela
t
eT
expressão, c ( t ) =
T
t ≥ 0 onde T representa a constate de tempo do sistema.
Define-se em primeiro o tempo de 0 a 10 segundos de, depois a constante de tempo
por exemplo T=3 e por fim o gráfico pelo comando plot(x,y):
Define-se em primeiro o tempo de 0 a 4 segundos de 0.1 em 0.1, logo t=0:0.1:4,
» t=0:0.1:4;
»
depois a expressão matemática da resposta temporal para várias constantes de tempo,
T= 0.5, T=1, T=2, T=8,
» T=0.5;
» y1=exp(-t/T)/T;
» T=1;
» y2=exp(-t/T)/T;
» T=2;
» y3=exp(-t/T)/T;
» T=4;
» y4=exp(-t/T)/T;
» T=8;
» y5=exp(-t/T)/T;
e por fim o gráfico pelo comando plot(x,y) onde se coloca no mesmo gráfico as várias
curvas,
» plot(t,y1,t,y2,t,y3,t,y4,t,y5)
»
Por Profª Sónia Marques
4
Instituto Politécnico de Setúbal - Controlo – 02/03
2
T=0.5
1.8
1.6
T=1
1.4
1.2
T=2
1
T=4
0.8
0.6
T=8
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
No entanto a resposta do sistema a um impulso unitário já está definida no Matlab e é
dada pelo comando impulse(num,den):
» T=8;
» num=1;
» den=[T 1];
» impulse(num,den)
»
Impulse Response
0.12
0.1
Amplitude
0.08
0.06
0.04
0.02
0
0
5
10
15
20
25
30
35
40
45
Time (sec.)
ESCALÃO UNITÁRIO
u(t)
1 t ≥ a
u( t ) =
0 t < a
1
0
Por Profª Sónia Marques
a
t
5
Instituto Politécnico de Setúbal - Controlo – 02/03
SISTEMAS DE 1ª ORDEM
Considere um sistema de 1ª ordem com a seguinte função de transferência genérica,
1
G( S ) =
Ts + 1
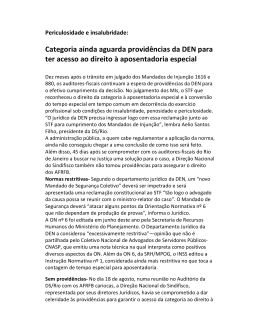
A resposta do sistema a um degrau unitário de um sistema de 1ª ordem a um escalão
unitário é dada pela expressão, u ( t ) = 1 − e
de tempo do sistema.
−
t
T
t ≥ 0 onde T representa a constate
Define-se em primeiro o tempo de 0 a 10 segundos de 0.09 em 0.09, logo t=0:0.09:10,
» t=0:0.09:10;
depois a expressão matemática da resposta temporal para várias constantes de tempo,
T= 1, T=1.5, T=4, T=10 ,
»T1=1;
»T2=1.5;
»T3=4;
»T4=10;
»y1=1-exp(-t/T1);
»y2=1-exp(-t/T2);
»y3=1-exp(-t/T3);
»y4=1-exp(-t/T4);
e por fim o gráfico pelo comando plot(x,y) onde se coloca no mesmo gráfico as
quatro curvas:
»plot(t, y1,'mo',t,y2,'c.',t , y3,'g*', t , y4, 'k+')
»
T=10
T=4
1
0.9
0.8
0.7
T=1.5
0.6
0.5
T=1
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
Verifica-se então conforme esperado que quanto menor a constante de tempo mais
rápida é a resposta do sistema.
Por Profª Sónia Marques
6
Instituto Politécnico de Setúbal - Controlo – 02/03
Existe no entanto uma função definida no Matlab que permite obter, a partir de
qualquer função de transferência, a resposta do sistema a um escalão unitário. Essa
função é step(numerador,denominador).
» T =8;
» num=1;
» den=[T 1];
» step(num,den)
»
Step Response
1
0.9
0.8
Amplitude
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
5
10
15
20
25
30
35
40
45
Time (sec.)
Existe uma outra função definida no matlab, o comando ltiview, que representa não
só a resposta temporal de sistemas a um escalão unitário bem como ao impulso
unitário, o diagrama de bode, o diagrama de Nyquist, entre outros, bem como
parâmetros importantes característico de cada gráfico.
Considere a função de transferência
K1
onde K1=2.95 e K2=0.47
G( S ) = 2
s + sK 1K 2 + K 1
» sys=tf(2.95, [1 2.95*0.47 2.95])
Transfer function:
2.95
-------------------s^2 + 1.387 s + 2.95
»ltiview('step',sys)
»
Por Profª Sónia Marques
7
Instituto Politécnico de Setúbal - Controlo – 02/03
Step Response
1.5
Amplitude
1
0.5
0
0
1.6
3.2
4.8
6.4
8
Time (sec.)
Impulse Response
1.5
Amplitude
1
0.5
0
-0.5
0
1.6
3.2
4.8
6.4
8
Time (sec.)
Bode Diagrams
Phase (deg); Magnitude (dB)
50
0
-50
0
-50
-100
-150
-200
-1
10
0
10
1
10
Frequency (rad/sec)
Por Profª Sónia Marques
8
Instituto Politécnico de Setúbal - Controlo – 02/03
SISTEMAS DE 2ª ORDEM
Considere um sistema de 2ª ordem com a seguinte função de transferência genérica,
G( S ) =
ω n2
s 2 + s 2ξω nn + ω 2
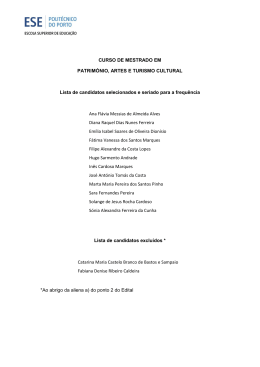
Fazendo a frequência natural não amortecida ωn =5 rad/s e variando o coeficiente de
amortecimento ξ= 0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1 e 2, vem,
» num=25;
» coef=0
» den=[1 2*coef*5 25];
» sys=tf(num,den)
Transfer function:
25
-------s^2 + 25
» ltiview('step',tf(num,den));
» coef=0.1
» den=[1 2*coef*5 25]
» sys1=tf(num,den)
Transfer function:
25
-----------s^2 + s + 25
» coef=0.2
» den=[1 2*coef*5 25];
» sys=tf(num,den)
Transfer function:
25
-------s^2 + 2s+25
» coef=0.3
:
:
» coef=2
» den=[1 2*coef*5 25]
» sys20=tf(num,den)
Transfer function:
25
--------------s^2 + 20 s + 25
»
No fim faz-se refresh no Workspace no gráfico do LTI Viewer e as respostas são
representadas todas no mesmo gráfico,
Por Profª Sónia Marques
9
Instituto Politécnico de Setúbal - Controlo – 02/03
ξ=0
Step Response
2
ξ=0.1
1.8
ξ=0.2
1.6
ξ=0.4
ξ=0.3
Amplitude
1.4
ξ=0.5
1.2
1
0.8
0.6
ξ=1
0.4
0.2
0
ξ=2
0
Time (sec.)
Considerando o caso de subamortecido, 0≤ξ<1, no plot options obtenha o tempo de
pico, o tempo de subida ou crescimento, o tempo de estabelecimento ou acomodação,
e comente.
Considere agora o caso de amortecimento crítico, ξ=1, e sobreamortecimento, ξ>1, o
que varia nas características da resposta transitória.
Fazendo o coeficiente de amortecimento ξ = 0.2 e variando a frequência natural não
amortecida ωn entre 0 e 5 , vem,
» w=0.1;
» num=w*w;
» den=[1 2*w*0.2 w*w];
» a=tf(num,den);
» w=0.5;
» num=w*w;
» den=[1 2*w*0.2 w*w];
» a1=tf(num,den);
» w=0.9;
» num=w*w;
» den=[1 2*w*0.2 w*w];
» a2=tf(num,den);
Por Profª Sónia Marques
10
Instituto Politécnico de Setúbal - Controlo – 02/03
» w=1.5;
» num=w*w;
» den=[1 2*w*0.2 w*w];
» a3=tf(num,den);
» w=5;
» num=w*w;
» den=[1 2*w*0.2 w*w];
» a4=tf(num,den);
» ltiview(‘step’,a,a1,a2,a3,a4)
»
Step Response
w=1.5
2
w=.5
w=0.9
1.8
w=0.5
w=0.1
1.6
Amplitude
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
50
Time (sec.)
O que se mantêm? Como é que variam as características da resposta ao escalão
unitário, comente.
COMPARAÇÃO DE UM SISTEMA DE 1º ORDEM COM UM SISTEMA DE
2º ORDEM SOBREAMORTECIDO, ξ>1,
» num1=1;
» den1=[1 1];
» a1=tf(num1,den1)
Transfer function:
1
----s+1
» num2=36;
» den2=[1 3*2*6 36];
» a2=tf(num2,den2)
»
Por Profª Sónia Marques
11
Instituto Politécnico de Setúbal - Controlo – 02/03
Transfer function:
36
--------------s^2 + 36 s + 36
» ltiview('step',a1,a2)
»
Step Response
1
0.9
0.8
Amplitude
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
Time (sec.)
Como é que se podem diferenciar a resposta a um sistema de 1ª ordem e a resposta ao
sistema de 2ª ordem?? Pela derivada na origem.
Ampliando na origem,
Step Response
0.14
0.12
Amplitude
0.1
0.08
0.06
0.04
0.02
0
0
Time (sec.)
EXERCICÍOS
Considere então um sistema de 2ª ordem com frequência natural não amortecida ωn=5
e coeficiente de amortecimento ξ =2, a função de transferência é então,
G(S ) =
Por Profª Sónia Marques
25
s + 4s + 25
2
12
Instituto Politécnico de Setúbal - Controlo – 02/03
Representa-se o numerador por um polinómio num=[25] e o denominador
den=[ 1 4 25]. O escalão unitário é dado pelo comando step(num,den):
» num=25;
» den=[ 1 4 25];
» step(num,den)
»
Step Response
From: U(1)
1.4
1.2
To: Y(1)
Amplitude
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
Time (sec.)
O coeficiente de amortecimento - ξ - e frequência natural não amortecida - Wn pode
ser determinada pelo comando damp(den):
» [Wn,coef]=damp(den)
Wn =
5
5
coef =
0.4000
0.4000
»
Fazendo ϖn = 5 e ξ = 0 o denominador fica s 2 + 2ξω n s + ω n2 = s 2 + 0s + 25 logo a
25
e o gráfico vem:
função de transferência é : G( S ) = 2
s + 25
Por Profª Sónia Marques
13
Instituto Politécnico de Setúbal - Controlo – 02/03
Step Response
2
1.8
1.6
Amplitude
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
Time (sec.)
Calcule os pólos da função de transferência utilizando o comando roots.
Onde se localizam no plano complexo, utilize o comando pzmap?
Relacione a localização dos pólos com o tipo de resposta obtida no gráfico anterior.
Por Profª Sónia Marques
14
Download