UNIVERSIDADE FEDERAL FLUMINENSE
Instituto de Matemática
Retas em Superfícies Algébricas
Michael Santos Gonzales Gargate
Dissertação submetida ao Corpo Docente
do Instituto de Matemática da Universidade
Federal Fluminense, como parte dos requisitos necessários para a obtenção do grau de
Mestre.
Linha de Pesquisa: Geometria Algébrica
Orientador : Nivaldo Medeiros
Niterói, 31 de março de 2010.
Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.
A meus pais Nicolas Gonzales e Felicitas Gargate, meus irmãos
Ivan, Karen e Renzo e a minha tia Blandina Gargate, por ter-me
apoiado sempre.
Agradecimentos
Aos meus pais, eles em todo momento me incentivaram, e nunca esqueceram de
mim, especialmente quando mais precisei de sua ajuda. A minha tia Blandina que eu
considero como a minha segunda mãe. A meus Padrinhos Miguel e Esther, dos quais
sempre tive o apoio que precise.
A meu irmão Ivan, que sempre me apoio e sempre esteve no momento que mais
precise dele, e porque apesar de tudo, não deixou de acreditar em mim. Assim como a
meus irmãos Karen e Renzo, que sempre estão quando eu mas preciso. Também como
esquecer de meus primos Jean Piere, Ericka e de meu novo sobrinho Josue.
Ao meu orientador Nivaldo Medeiros, por ter-me guiado com sua experiência e ter
muita paciência comigo na elaboração deste trabalho, por ser mais que só um professor
com seus alunos, e por ter-me ajudado no momento mas difícil que tive aqui no Brasil,
estou inteiramente agradecido por isso.
Aos amigos e colegas que tenho na UFF. Agradeço especialmente a minha grande
amiga Jacqueline, que me ajudo no momento mas difícil que tive aqui no brasil, e Maria
Eugenia, tanto a ela como a seus pais. A minha turma de mestrado 2008, e a todos
meus amigos da post graduação da UFF.
Ao professor Dinamérico Pombo, que sempre foi atento não só comigo, mais também
com meus amigos do Mestrado na UFF. Assim como a Mariana que sempre me ajudo e
informo quando eu precise de algum favor.
Ao professor Contreras Chamorro de Perú, por sua gentileza e conselhos para eu seguir
nas Matemáticas, e ao grande professor Antonio Pareja Herrera de Perú, que já não está
entre nós, mas ele sempre foi um grande um professor e amigo, com sua humildade de
sempre.
Sumário
1 Preliminares
1.1 Noções básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Dimensão e fibras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Espaços tangentes, variedades suaves e normais . . . . . . . . . . . . . .
3
3
8
9
2 Retas em superfícies cúbicas
2.1 Considerações gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 As 27 retas de uma cúbica suave em P3 . . . . . . . . . . . . . . . . . . .
11
11
14
3 Retas em superfícies
3.1 Superfícies da Forma φ(x, y) = ψ(z, t) . . . . . . . . . . . . . . . . . . . .
3.2 Superfícies da Forma td = f (x, y, z) . . . . . . . . . . . . . . . . . . . . .
3.3 O número máximo de retas em uma superfície . . . . . . . . . . . . . . .
22
22
30
33
1
Introdução
Um dos resultados mais famosos da escola de Geometria Algébrica italiana do século
XIX é que toda superfície cúbica suave no espaço projetivo de dimensão três contém
exatamente 27 retas. Livros inteiros foram escritos a este respeito, sobre as possíveis
configurações, simetrias, etc.
O objetivo da presente dissertação é fazer um estudo similar para superfícies suaves
de grau superior, o qual é baseado no trabalho apresentado por Beniamino Segre em
1943 [Seg43], que estuda o seguinte problema: Qual é o número máximo de retas que
uma superfície suave de grau d em P3 pode conter?
Um dos resultados de [Seg43] é que se d = 4, então este número é 64. Por outro lado,
a existência de quárticas suaves contendo exatamente 64 retas é um resultado clássico,
como por exemplo a quártica de Schur [Schur1882]
x(x3 − y 3 ) = z(z 3 − t3 ).
Para d ≥ 5, este é um resultado ainda em aberto. A construção de superfícies contendo
muitas retas é difícil e, nesta dissertação, apresentamos algumas construções e resultados
nesta direção.
Além do interesse geométrico em exibir superfícies com muitas retas, há também
aplicações em Aritmética, como determinar curvas sobre corpos de números com muitos
pontos racionais (veja [CHM95] e [BS07] por exemplo) e superfícies sobre corpos finitos
com muitos pontos racionais, como em [Vol03].
No Capítulo 1 fazemos um resumo breve de conceitos e resultados básicos de Geometria Algébrica, constituindo um esboço dos pré-requisitos necessários para uma boa
compreensão da dissertação.
Iniciamos o Capítulo 2 discutindo propriedades básicas de retas em superfícies.
Mostramos que uma superfície geral de grau superior a quatro em P3 não possui retas, em contraste com o caso em grau três: toda superfície cúbica em P3 , suave ou não,
contém pelo menos uma reta. Em seguida, discutimos o célebre teorema de Cayley e
Salmon de 1849:
Toda superfície cúbica não singular em P3 contém exatamente 27 retas.
Não fazemos nenhuma análise mais profundo sobre a configuração das 27 retas. Ao
leitor interessado indicamos [Hart77, V.4], [Haub01] ou [Dolg04] para um ótimo resumo
histórico dos avanços sobre o tema.
1
SUMÁRIO
2
O Capítulo 3, o mais importante deste trabalho, é baseado no trabalho de Boissière e
Sarti [BS07]. Nele estudamos com detalhe superfícies contendo um número significativo
de retas. Apresentaremos dois tipos de construções:
(1) Superfícies da forma φ(x, y) = ψ(z, t), onde φ e ψ são polinômios homogêneos de
grau d.
(2) Superfícies dadas por um d-recobrimento do plano e ramificadas ao longo de uma
curva de grau d.
No primeiro caso, denotando Nd o número máximo de retas contidas nessa superfície,
obtemos o resultado dado no Teorema 3.1, que Nd = d(d + αd ) onde αd : P1 → P1 é o
número de isomorfismos de que leva os d zeros de φ nos d zeros de ψ.
Finalizamos o Capítulo discutindo cotas uniformes do número de retas em uma superfície de grau d, como por exemplo o resultado de Segre [Seg43]:
O número máximo de uma superfície não singular de grau d em P3 não pode
exceder (d − 2)(11d − 6).
Embora alguns resultados aqui discutidos sejam válidos em contextos mais amplos,
por simplicidade optamos pela seguinte hipótese geral: todas as variedades nesta dissertação estão definidas sobre um corpo algebricamente fechado, de característica zero.
Palavras-chave: Geometria Algébrica, superfícies algébricas
Capítulo 1
Preliminares
Começamos expondo algumas noções básicas em Geometria Algébrica. Definimos as
variedades algébricas, tratamos de seus morfismos e das propriedades que são preservadas
por esses morfismos. Além disso, enunciamos diversos resultados serão utilizados posteriormente. Nesta dissertação, o corpo de base k sempre será algebricamente fechado.
1.1
Noções básicas
O espaço afim de dimensão n, denotado por An , é simplesmente o conjunto de n-uplas
com entradas em k. Definimos uma topologia neste conjunto: dizemos que X ⊂ An é
um fechado (variedade afim) se existem polinômios F1 , . . . , Fk ∈ k[T1 , . . . , Tn ] tais que
X = Z(F1 , . . . , Fk ) onde Z(F1 , . . . , Fk ) = {p ∈ An | Fi (p) = 0 para i = 1, . . . , k}. A
topologia gerada por estes fechados é chamada a topologia de Zariski.
Dado um fechado afim X ⊂ An , definimos I(X) como o ideal de polinômios que
se anulam em todos os pontos de X. Dizemos que uma função f : X → Am é regular
(ou um morfismo) se é a restrição de uma função polinomial, ou seja, se é da forma
f (x1 , . . . , xn ) = (f1 , . . . , fm ) onde cada fi é um polinômio em k[T1 , . . . , Tn ]. Denotamos
por k[X] o anel das funções polinomiais em X. Em [Sh77, Seção 2.2, p. 24] podemos ver
que este anel é isomorfo a k[T1 , . . . , Tn ]/I(X). No caso que I(X) é um ideal primo, k[X]
é um domínio, pelo que tem sentido falar de seu corpo de frações. Denotamos este corpo
por k(X).
Definimos Pn como o conjunto de retas de An+1 que passam pela origem. Para um
ponto p = (x0 , . . . , xn ) ∈ An+1 \ {0}, denotamos por (x0 : · · · : xn ) a única reta de Pn
que passa por p e a origem. Estas são chamadas de coordenadas homogêneas do ponto
p. Note que (x0 : · · · : xn ) = (y0 : · · · : yn ) se e somente se existe λ ∈ k ∗ tal que xi = λyi
para todo i.
Podemos estender a topologia de Zariski definida anteriormente para conjuntos de Pn .
Um conjunto X ⊂ Pn é uma variedade projetiva se é o conjunto de zeros de polinômios homogêneos em k[T0 , . . . , Tn ]. Munimos X da topologia induzida por Pn . Os conjuntos que
3
CAPÍTULO 1. PRELIMINARES
4
são abertos de alguma variedade projetiva são chamados de quase-projetivos. Em geral,
denominamos simplesmente por variedade qualquer conjunto algébrico quase-projetivo.
Observamos que o espaço afim An está naturalmente mergulhado em Pn mediante a
inclusão (x1 , . . . , xn ) 7→ (1 : x1 : · · · : xn ) e fica identificado com o aberto Pn \ Z(x0 ).
Assim, variedades afins também são quase-projetivas.
Para uma variedade quase-projetiva X dizemos que um elemento x ∈ X é tomado
genericamente se x é tomado em algum aberto denso de X.
Dizemos que uma função f : X → Pm é regular em um ponto p se existe um aberto
afim U ⊂ X contendo p, tal que a função restrita a esse aberto é um morfismo. Uma
função é regular em X se é regular em todos os pontos, em particular os mapas regulares
(também chamados morfismos) são contínuos na topologia de Zariski.
Dizemos que f : X → Y é um isomorfismo se f tem inversa regular. Se f (X) é
denso em Y dizemos que f é dominante. Construímos o conjunto de funções racionais,
f : X 99K Pm , como o conjunto de classes de equivalência (U, f ) tais que U é um aberto
de X, e f é uma função regular em U , com a relação de equivalência (U, f ) ' (U 0 , f 0 ) se
f |U ∩U 0 = f 0 |U ∩U 0 .
Se entre X e Y existe uma função racional que tem inversa racional, dizemos que X, Y
são birracionalmente equivalentes. Estendemos a definição de afim, para os conjuntos que
sejam isomorfos a conjuntos afins. Para uma variedade quase-projetiva X, denotamos
por OX o conjunto de funções regulares de X a k.
Exemplo 1.1 (Produto de variedades projetivas). Seja X = Pn × Pm , e f : X → PN ,
onde N = (m + 1)(n + 1) − 1, dada por f [(x0 : · · · : xn ), (y0 : · · · : yn )] = (· · · : xi yj : . . . ).
Então f é injetiva e sua imagem é um fechado de PN (veja [Sh77, Seção 1.5.1, p. 55]). A
função f é chamada o mergulho de Segre e definimos X, com a topologia induzida por
f , como a variedade produto Pn × Pm .
Exemplo 1.2. [Grassmannianas] Tomamos X como
o espaço de planos de dimensão k
n+1
em Pn , definimos f : X → PN (onde N = k+1 − 1) tal que se o plano L é gerado
pelos vetores v0 , . . . , vk , então f (L) é o ponto gerado pelos determinantes dos menores
(k + 1) × (k + 1) da matriz formada por v0 , . . . , vk ; esta aplicação está bem definida
e é injetiva, e sua imagem é um fechado de PN (veja [Harr92, Exemplo 6.6, p. 64]).
Denotamos a essa imagem como Gk,n , a Grassmanniana de planos de dimensão k em Pn .
Dizemos que o ponto f (L) são as coordenadas de Plücker de L. Por exemplo, G1,3 é a
Grassmanniana das retas em P3 e é dada pelos zeros de equação
X0 X5 − X1 X4 + X2 X3 = 0
em P5 (veja [Sh77, Seção 1.4.1, p. 43]).
Definição 1.3. Um espaço topológico é irredutível se não pode ser escrito como a união
de dois fechados próprios. No caso em que X é um conjunto quase-projetivo irredutível o
ideal I(X) é primo e o conjunto das funções racionais de X ate k é um corpo. Denotamos
por k(X) este conjunto.
CAPÍTULO 1. PRELIMINARES
5
Proposição 1.4. Para X uma variedade quase-projetiva, então X pode-se escrever de
maneira única (salvo permutação dos fatores) como X1 ∪ X2 ∪ · · · ∪ Xk onde cada Xi é
um fechado irredutível e Xi 6⊂ Xj para i 6= j.
Demonstração. Veja [Sh77, Sec. 3.1, p. 34]
Proposição 1.5. Seja X um conjunto algébrico e X seu fecho. Então X é irredutível se
somente se X é irredutível.
Demonstração. É claro que se X = X1 ∪ X2 com X1 , X2 conjuntos fechados próprios de
X, então X = X1 ∪ X2 além disso como os Xi são fechados de X, os Xi são conjuntos
próprios de X.
Para a recíproca, suponhamos que X = F1 ∪ F2 com Fi fechados próprios de X, assim
X = (X ∩ F1 ) ∪ (X ∩ F2 ), e se pode ver que se X ∩ F1 = X então X ⊂ Fi o que é absurdo,
logo ambos conjuntos são próprios de X.
Proposição 1.6. Se X é irredutível e f : X → Pm é mapa regular, então f (X) é irredutível.
Demonstração. Suponhamos que f (X) = Y1 ∪ Y2 com Y1 , Y2 fechados de f (X) assim
X1 = f −1 (Y1 ), X2 = f −1 (Y2 ) também são fechados de X, cuja união contém a X; como
X é irredutível, um destes fechados não pode ser próprio, logo suponhamos X1 = X,
assim Y1 = f (X1 ) = f (X) pelo que Y1 , Y2 não podem ser ambos próprios.
Dizemos que um mapa f : X → Y é fechado, se as imagens de fechados de X são
também fechados de Y .
Proposição 1.7. Seja f : X → Y um mapa regular. Suponhamos que X é uma variedade
projetiva, então f é um mapa fechado.
Demonstração. Veja [Sh77, Thm. 1.5.2, p. 57]
Proposição 1.8. Se X é uma variedade projetiva, e Y uma variedade quase-projetiva
então a segunda projeção π2 : X × Y → Y é um morfismo fechado.
Demonstração. Veja [Sh77, Thm. 1.5.3, p. 58]
Proposição 1.9. Se f : X → Y é um morfismo regular entre conjuntos quase-projetivos
X, Y e f é dominante, então f (X) contém um aberto de Y .
Demonstração. Veja [Sh77, Thm 1.5.6 p. 63]
Agora faremos um breve estudo sobre os automorfismos de Pn .
Definição 1.10. Dizemos que T : Pn → Pn é uma transformação projetiva se existe
uma matriz não singular (aij ) tal que T [v] = [(aij )v], para todo vetor não nulo de An+1 .
Denotamos ao conjunto de transformações projetivas em Pn como PGLn .
CAPÍTULO 1. PRELIMINARES
6
É claro que as transformações projetivas são automorfismos de Pn . E para P1 temos:
Lema 1.11. O único automorfismo de P1 que tem três pontos fixos é a identidade.
Demonstração. Podemos supor sem perda de generalidade que os pontos fixos de
F : P1 → P1 são (1 : 0), (0 : 1) e (1 : 1); como F (0 : 1) = (0 : 1), podemos escrever
F (1 : y) = (1 : f (y)), onde a aplicação f : A1 → A1 está bem definida e é regular em A1 ;
mas toda aplicação regular em A1 é um polinômio, e os únicos polinômios que induzem
aplicações bijetivas são os de grau 1, assim f (X) = aX + b, como f (0) = 0 e f (1) = 1
logo temos que f (X) = X e F (x : y) = (x : y) para todo (x : y) ∈ P1 .
Uma conseqüência imediata desta proposição é o seguinte resultado:
Corolário 1.12. Todo automorfismo de P1 é uma transformação projetiva.
De fato, vale um resultado mais geral: Todo automorfismo de Pn é uma transformação
projetiva. (veja [Hart77, p. 151]).
Dizemos que um conjunto finito X ⊂ Pn está em posição geral se todo subconjunto
de l pontos com 3 ≤ l ≤ n + 1, não está contido em um plano l − 2 dimensional ou,
equivalentemente se quaisquer l + 1 deles geram um plano l-dimensional. Os pontos
(1 : 0 : · · · : 0), (0 : 1 : · · · : 0), . . . , (0 : · · · : 0 : 1)
são chamados os pontos fundamentais de Pn .
Uma propriedade básica acerca das transformações projetivas é:
Proposição 1.13. Dois subconjuntos de n + 2 pontos de Pn em posição geral são projetivamente equivalentes por uma única transformação projetiva.
Demonstração. Basta mostrar a afirmação para os pontos fundamentais p0 , . . . , pn ∈ Pn
e pn+1 = (1 : 1 : · · · : 1). Para mostrar a existência, seja qi = (qi,0 : · · · : qi,n ) para
i = 0, . . . , n + 1. Como q0 , . . . , qn geram Pn , temos que:
(qn+1,0 , . . . , qn+1,n ) = a0 (q0,0 , . . . , q0,n ) + · · · + an (qn,0 , . . . , qn,n )
onde ai ∈ k. Como os pontos estão em posição geral, temos ai 6= 0 para i = 0, . . . , n.
Então a matriz:
a0 q0,0 a1 q0,1 . . . an q0,n
a0 q1,0 a1 q1,1 . . . an q1,n
..
..
.
.
a0 qn,0 a1 qn,1 . . . an qn,n
é invertível e induz uma transformação projetiva T tal que T (pi ) = qi para i = 0, . . . , n+1.
Para provar a unicidade, podemos supor sem perda de generalidade que qi = pi são os
pontos fundamentais de Pn para i = 0, . . . , n e pn+1 = qn+1 = (1 : 1 : · · · : 1), logo uma
transformação T tal que T (pi ) = qi é da forma T = (T0 : T1 : · · · : Tn ) onde Ti é um
CAPÍTULO 1. PRELIMINARES
7
polinômio linear homogêneo; como Ti (pj ) = 0 para i 6= j e j < n + 1, Ti é da forma ai Xi ;
assim T (1 : 1 : · · · : 1) = (a0 : a1 : · · · : an ) logo a0 = a1 = · · · = an , pelo qual T é igual à
transformação identidade em todos os pontos.
A razão cruzada
Com respeito a última Proposição, perguntamos: o que se pode dizer para conjuntos
com mais de n + 2 pontos?
Vejamos a resposta em P1 . Sejam z1 , z2 , z3 três pontos distintos de P1 e seja z4 ∈ P1
um quarto ponto. Escreva P1 = k ∪ {∞}. Definimos a razão cruzada:
λ(z1 , . . . , z4 ) =
(z1 − z3 )(z2 − z4 )
(z2 − z3 )(z1 − z4 )
com a convenção de que se um dos zi ’s é ∞, então removemos as duas diferenças correspondentes no cálculo da fórmula. Assim definido, λ = λ(z1 , . . . , z4 ) é a imagem de z4
pela única transformação projetiva P1 → P1 que leva z1 , z2 , z3 a ∞, 0, 1 respectivamente.
Em particular, temos que λ = ∞, 0, 1 se somente se z4 = z1 , z2 , z3 , respectivamente.
Logo dois conjuntos de quatro pontos distintos em P1 são projetivamente equivalentes
se e somente se eles têm a mesma razão cruzada. E para conjuntos z1 , . . . , zr e z10 , . . . , zr0
com r ≥ 4, basta verificar se as razões λ(z1 , z2 , z3 , zi ) e λ(z10 , z20 , z30 , zi0 ) coincidem para todo
i ≥ 4 (pois pelo Lema 1.11 um automorfismo de P1 fica determinado pela sua imagem
em três pontos).
Sejam z1 , . . . , z4 ∈ P1 quatro pontos distintos. Então sua razão cruzada é um número
λ ∈ k \ {0, 1} e depende da ordem dos pontos considerados. Temos assim uma ação do
grupo simétrico S4 em k \ {0, 1} dada por σ(λ) 7→ λ(zσ(1) , . . . , zσ(4) ). Esta ação não é
transitiva: de fato,
λ = λ(z1 , z2 , z3 , z4 ) = λ(z2 , z1 , z4 , z3 ) = λ(z3 , z4 , z1 , z2 ) = λ(z4 , z3 , z2 , z1 )
ou seja, o grupo de Klein {(1), (12)(34), (13)(24), (14)(23)} está contido no estabilizador
de qualquer elemento λ ∈ k \ {0, 1}. Assim, uma órbita consiste no máximo de 6 elementos, a saber
λ(z1 , z2 , z3 , z4 ) = λ
λ(z1 , z2 , z4 , z3 ) = λ1
1
λ(z1 , z3 , z4 , z2 ) = 1−λ
λ(z1 , z3 , z2 , z4 ) = 1 − λ
λ
λ(z1 , z4 , z3 , z2 ) = λ−1
λ(z1 , z4 , z2 , z3 ) = λ−1
λ
ou, em outras palavras, a órbita de λ é o conjunto
n 1
1
λ−1 λ o
.
Λ = Λ(λ) = λ, , 1 − λ,
,
,
λ
1−λ λ λ−1
Permitindo que z4 assuma um dos valores z1 , z2 , z3 , temos agora uma ação do grupo
simétrico S3 na esfera de Riemann, dada pelas seis funções acima.
A cardinalidade de uma órbita Λ pode ser menor do que seis. Neste caso, temos três
possibilidades:
CAPÍTULO 1. PRELIMINARES
8
• Λ = {∞, 0, 1}, quando z4 ∈ {z1 , z2 , z3 }.
• Λ = {−1, 21 , 2};
• Λ = {ω, ω 2 }, onde ω ∈ k é uma raiz cúbica primitiva da unidade. Este é o
caso refletindo a maior simetria possível entre zi ’s, sendo o estabilizador o grupo
alternado A4 das permutações pares.
Em resumo, dois conjuntos de quatro pontos não ordenados de P1 são projetivamente
equivalentes se e somente se os conjuntos Λ associados são iguais; note que Λ(α) = Λ(β)
se, e somente se, β ∈ Λ(α). Aqui introduz-se o seguinte operador para os conjuntos Λ(α),
denominado j-invariante:
(1 − α + α2 )3
j(α) =
α2 (1 − α)2
onde, para α, β ∈ k \ {0, 1}, tem-se que j(α) = j(β) se, e somente se, Λ(α) = Λ(β).
1.2
Dimensão e fibras
Definimos a dimensão de uma variedade irredutível X como o grau de transcendência
da extensão k(X)|k e denotamos dim(X). Se X é um quase-projetivo em geral, definimos
a dimensão de X como o máximo das dimensões de suas componentes irredutíveis. Se
Y ⊂ X é um fechado de X então chamamos ao número dim(X) − dim(Y ) como a
codimensão de Y em X. Variedades algébricas de dimensão 1 são chamadas curvas e de
dimensão 2 são chamadas superfícies. Dizemos que Y ⊂ X é uma hipersuperfície, se Y
tem codimensão 1.
Por exemplo, se X tem dimensão n e Y tem dimensão m então X × Y tem dimensão
m + n; e a Grassmanniana Gk,n tem dimensão (k + 1)(n − k).
A dimensão de X também se pode definir como o maior inteiro n tal que exista uma
cadeia estritamente decrescente ∅ ( Y0 ( Y1 ( · · · ( Yn , de fechados irredutíveis de X.
Proposição 1.14 (Teorema do ideal principal de Krull). Seja X ⊂ PN uma variedade
irredutível n-dimensional, e Y ⊂ X o conjunto de zeros de m formas. Então toda componente irredutível (não vazia) de Y tem dimensão maior ou igual a n − m.
Demonstração. Veja [Sh77, 1.6.5 p. 71]
Este teorema diz, em particular, que toda variedade definida por uma única equação
tem codimensão 1. Para o caso de Pn , a recíproca também vale. Mas em geral não é
certo que toda subvariedade de codimensão 1 seja definida por uma única equação. Por
exemplo, as cúbicas torcidas são subvariedades de superfícies cúbicas que não podem ser
definidas por um só polinômio.
Para um mapa regular f : X → Y entre variedades quase-projetivas, dado y ∈ Y o
conjunto f −1 (y) é chamado a fibra de f sobre y. Esta é obviamente uma subvariedade
fechada de Y .
CAPÍTULO 1. PRELIMINARES
9
Teorema 1.15 (Teorema de dimensão das fibras). Seja f : X → Y um mapa regular entre
variedades irredutíveis, com dim(X) = n, dim(Y ) = m. Suponha que f é dominante.
Então m ≤ n e
1. dim(F ) ≥ n − m para qualquer componente irredutível F de f −1 (y).
2. Existe um conjunto aberto U ⊂ Y tal que dim(f −1 (y)) = n − m para todo y ∈ U .
Demonstração. Veja [Sh77, Thm. 1.6.7, p. 76]
Um critério útil para saber se um conjunto é irredutível surge como conseqüência do
teorema anterior:
Teorema 1.16. Seja f : X → Y um mapa regular fechado e dominante entre duas
variedades quase-projetivas. Suponha que Y é irredutível, que todas as fibras f −1 (y) são
irredutíveis e têm a mesma dimensão. Então X é irredutível.
Demonstração. Veja [Sh77, Thm. 1.6.8, p. 77]
Como aplicação destes teoremas, obtemos informações sobre as superfícies em P3 que
contém alguma reta.
1.3
Espaços tangentes, variedades suaves e normais
Seja X = Z(f1 , . . . , fn ) ⊂ An um fechado afim. Dado um ponto p ∈ X definimos o
espaço tangente de X em p, Tp X como o plano gerado pelos polinômios lineares:
dfi (p) =
n
X
∂fi
(Xj − xj )
∂x
j
j=1
para o caso projetivo definimos o plano tangente de X em p como o fecho do espaço Tp X.
Em geral, vale que dimk Tp X ≥ dimp X. Dizemos que uma variedade é suave ou não
singular se dim(Tp X) = dim(X) para todo p ∈ X.
Uma propriedade muito similar à suavidade e equivalente para o caso de curvas, é
a normalidade. Dizemos que uma variedade X é normal se para cada ponto p ∈ X,
existe um aberto afim de U 3 p tal que k[U ] seja integralmente fechado. De maneira
equivalente, X é normal se o anel local de X em p é integralmente fechado, para todo
x ∈ X.
Proposição 1.17. Toda variedade não singular é normal.
Demonstração. Veja [Sh77, Thm. 2.5.3, p. 126]
CAPÍTULO 1. PRELIMINARES
10
Definição 1.18. Sejam X e Y variedades irredutíveis afins e f : X → Y uma aplicação regular e dominante. Dizemos que f é um morfismo finito se a extensão de anéis
f ∗ (k[Y ]) ⊂ k[X] é inteira. Estendemos esta definição para X, Y variedades quaseprojetivas: dizemos que f é finito se para todo ponto de y ∈ Y existe uma vizinhança
afim V 3 y tal que U = f −1 (V ) seja afim e que f |U : U → V seja finito.
Dada uma aplicação racional dominante f : X → Y com dim(X) = dim(Y ), esta
induz um homomorfismo injetor de corpos f ∗ : k(Y ) → k(X). Definimos o grau de f
como o grau da extensão [k(X) : f ∗ (k(Y ))].
Lema 1.19. Se f : X → Y é um mapa finito entre variedades irredutíveis, e Y é normal,
então o número de imagens inversas de cada ponto y ∈ Y é menor o igual do que o grau
de f . Mais ainda o conjunto onde se cumpre a igualdade é um aberto; este conjunto é
não vazio sempre que a extensão k(X)|f ∗ (k(Y )) é sepáravel.
Demonstração. Veja [Sh77, Thm. 2.6.4, p. 144]
Proposição 1.20. Seja f : X → Y um morfismo entre variedades irredutíveis afins, tal
que Y é normal e k(X)|f ∗ (k(Y )) seja separável e finita, então o número de pontos na
fibra geral é igual ao grau de f .
Demonstração. Mostramos que existe um aberto denso U contido em Y tal que f |f −1 (U )
é finito. Temos que f ∗ induz uma inclusão k[Y ] ⊂ k[X]. Sejam x1 , . . . , xr os geradores
de k[X] sobre k[Y ]. Como a extensão de corpos é finita cada xi é algébrico sobre k(X),
logo o polinômio minimal de xi é da forma:
(0)
(ni )
ai (xi )ni + · · · + ai
(0)
=0
(0)
Sejam a = a1 · · · ar e U ⊂ Y o aberto principal dado por Y \ Z(a). Tome V = f −1 (U ).
(0)
Então k[V ] = k[X][f ∗ (a−1 )] = f ∗ (k[U ])[x1 , . . . , xr ] e como ai são invertíveis em k[U ],
os polinômios minimais de x1 , . . . , xr são mônicos sobre k[U ], assim k[V ]|k[U ] é uma
extensão inteira e f |V é finito. Pelo Lema 1.19 existe um aberto U 0 ⊂ U tal que o número
de elementos na pré-imagem dos pontos de U 0 é exatamente o grau de f . Como U 0 é
denso em Y temos que o número de pontos na fibra geral é igual ao grau de f .
Corolário 1.21. Se um morfismo entre duas variedades irredutíveis é dominante, injetivo
e a extensão de corpos induzida é separável, então o morfismo é birracional.
Capítulo 2
Retas em superfícies cúbicas
Neste capítulo apresentamos uma demonstração de que toda cúbica suave no espaço
projetivo de dimensão três possui exatamente 27 retas. Começamos com considerações
gerais sobre a existência de retas em superfícies de grau qualquer.
2.1
Considerações gerais
Nesta parte do trabalho, utilizando variedades de incidência, mostraremos que toda
superfície cúbica em P3 contém pelo menos uma reta, e que a cúbica geral contém um
número finito delas. Começaremos provando que uma superfície geral de grau d ≥ 4 não
contém retas.
Para isto, consideremos uma superfície S ⊆ P3 dada pela equação F = 0, sendo
F ∈ k[u0 , u1 , u2 , u3 ]\{0} um polinômio homogêneo de grau d, e seja ` ⊆ P3 uma reta
dada pelas coordenadas de Plücker p01 , p02 , p03 , p12 , p13 , p23 (veja o Exemplo 1.2).
Lema 2.1. As condições que expressam o fato da reta ` estar sobre a superfície S são
relações algébricas entre os pij e os coeficientes de F , homogêneos em ambos os conjuntos.
Demonstração. Podemos escrever uma representação paramétrica de ` em termos de
suas coordenadas de Plücker. Sejam x = (x0 , x1 , x2 , x3 ) e y = (y0 , y1 , y2 , y3 ), dois vetores
linearmente independentes em k 4 , tais que x, y ∈ `. Seja L ⊆ k 4 o 2-espaço vetorial
gerado por x, y. Então
L = {hα, yix − hα, xiy | α ∈ k 4 }
(2.1)
De fato, dado l ∈ L , existem a, b ∈ k com l = ax + by. Por provar que existe α ∈ k 4 tal
que hα, yi x − hα, xi y = l = ax + by, isto é, existe α ∈ k 4 tal que
hα, yi = x0 α0 + x1 α1 + x2 α2 + x3 α3 = −b
hα, xi = y0 α0 + y1 α1 + y2 α2 + y3 α3 = a
Mas o sistema tem solução já que os vetores x e y são linearmente independentes. A
recíproca é óbvia.
11
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
12
Agora, se o vetor α tem coordenadas (α0 , α1 , α2 , α3 ), então o vetor (2.1), tem coordeP
nadas zi = j αj pij , (j = 0, 1, 2, 3), onde pij = xi yj − yi xj . Assim os pontos de ` são os
P
pontos com coordenadas homogêneas j αj pij (j = 0, 1, 2, 3), isto é :
` = {(α1 p01 + α2 p02 + α3 p03 : −α0 p01 + α2 p12 + α3 p13 : −α0 p02 − α1 p12 +
+α3 p23 : −α0 p03 − α1 p13 − α2 p23 ) | (α0 , α1 , α2 , α3 ) ∈ k 4 \(0, 0, 0, 0)}.
Logo, substituindo tais expressões na equação F (u0 , u1 , u2 , u3 ) = 0, e igualando a
zero os coeficientes de todos os monômios em αi , obtemos a condição que ` ⊂ S como
um conjunto finito de relações algébricas entre os coeficientes de F e as coordenadas de
Plücker pij .
Agora procedemos ao estudo sobre as retas contidas numa superfície em P3 . Para um
dado d, consideremos o espaço projetivo PN com
d+3
N=
− 1,
3
cujos pontos parametrizam superfícies em P3 de grau d, isto é, dadas por um polinômio
homogêneo em k[X0 , . . . , X3 ] de grau d. Seja G = G1,3 a Grassmanniana das retas de P3 ,
a saber a hipersuperfície quádrica de P5 dada por (veja Exemplo 1.2)
G = {(u0 , . . . , u5 ) ∈ P5 | u0 u5 − u1 u4 + u2 u3 = 0}.
Seja Γd ⊂ PN × G o conjunto dos pares ([S], [l]) ∈ PN × G, tais que a reta l ⊂ P3
esteja contida na superfície S ⊂ P3 . Pelo Lema 2.1, Γd é uma variedade projetiva.
Determinemos agora sua dimensão.
Para isto considere as projeções
p 1 : PN × G → PN
e p 2 : PN × G → G
que são mapas regulares. Consideremos agora suas restrições a Γd .
Note que p2 (Γd ) = G, isto é, para cada reta em P3 existe pelo menos uma superfície
de grau d que a contenha, possivelmente redutível.
Calculemos a dimensão das fibras p−1
Para isto, tomando uma transfor2 ([l]).
mação projetiva adequada, podemos supor que a reta l é dada por u0 = u1 = 0,
isto é, l = {(0 : 0 : u2 : u3 ) | (u2 , u3 ) ∈ P1 }. Os pontos [S] ∈ PN tais que
([S], [l]) ∈ p−1
2 ([l]) ⊂ Γd correspondem as formas F ∈ k[X0 , X1 , X2 , X3 ] de grau d tais que
F (0, 0, x2 , x3 ) = 0 para todo x2 , x3 ∈ k, isto é, às formas de grau d tais que os coeficientes
de X2d , X2d−1 X3 , . . . , X2 X3d−1 , X3d se anulam. Logo a codimensão do subespaço p−1
2 ([l]) é
−1
d + 1, e portanto dim p2 ([l]) = N − (d + 1).
Segue do Teorema 1.16 que Γd é irredutível. Assim pelo Teorema da Dimensão das
Fibras (Teorema 1.15) temos
dim Γd = dim p2 (Γd ) + dim p−1
2 ([l])
−1
= dim G + dim p2 ([l])
= 4 + N − (d + 1)
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
13
isto é,
dim Γd = N − d + 3.
Consideremos agora a outra projeção p1 : Γd → PN . Como Γd é um conjunto projetivo,
sua imagem p1 (Γd ) é um fechado de PN . Claro que dim p1 (Γd ) ≤ dim PN .
Se dim Γd < N , então p1 (Γd ) 6= PN , isto diz que nem toda superfície de grau d contém
uma reta. Mas, pelo o que fizemos acima, dim Γd < N ocorre exatamente quando d > 3.
Provamos assim o:
Teorema 2.2. Uma superfície genérica não singular de grau d ≥ 4 em P3 não contém
retas.
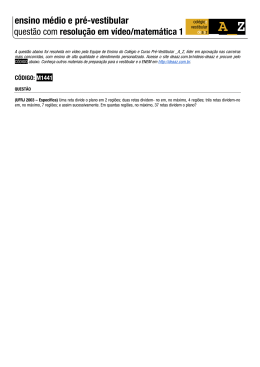
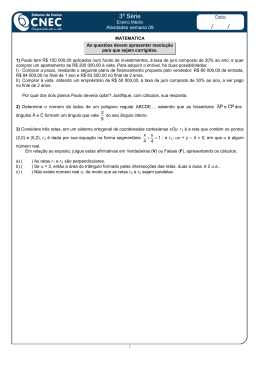
Exemplo 2.3. Por outro lado, toda superfície com grau d ≤ 3 em P3 contém pelo menos
uma reta. De fato,
• d = 1: todo plano contém infinitas retas.
• d = 2: seja Q = Z(F ) uma quádrica de P3 . Então F é uma forma quadrática.
Supondo que car k 6= 2, então após uma mudança de coordenadas temos que Q ∼
=
2
2
Z(X0 +· · ·+Xr ) para algum r ∈ {0, 1, 2, 3}. Em particular, Q é suave se e somente
se r = 3. Assim, a menos de transformações projetivas existem quatro quádricas
em P3 :
– Se r = 3, então Q é não-singular e nesse caso é isomorfa a imagem de P1 × P1
via o mergulho de Segre, isto é, Q ∼
= Z(X0 X3 − X1 X2 );
– Se r = 2, temos o cone quádrico;
– Para r = 1, a união de dois planos simples;
– E o plano duplo quando r = 0.
Figura 2.1: Quádricas em P3
Todas contém um número infinito de retas. Isto também pode ser obtido via nossos
cálculos com dimensão. Com efeito, se d = 2, então N = 9 e dim Γ2 = 10. Assim
ainda temos que dim p1 (Γ2 ) ≤ 9. Então pelo Teorema da Dimensão das Fibras
temos que para cada [S] ∈ PN ,
dim p−1
1 ([S]) ≥ dim(Γ2 ) − dim p1 (Γ2 ) ≥ 10 − 9 = 1.
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
14
• d = 3: Aqui temos N = 19 e dim Γ3 = N = 19. Observamos agora que existem
superfícies cúbicas que contém apenas um número finito de retas, como por exemplo
a cúbica (singular)
S : X1 X2 X3 = X03 .
De fato, S restrita ao espaço afim A3 dado por x0 = 1 não possui retas (escrevendo
parametricamente uma tal reta na forma Xi = ai T + bi para i = 1, 2, 3 chega-se a
uma contradição) e é claro que no plano infinito S contém exatamente três retas.
−1
Assim, p−1
1 ([S]) é um conjunto de três pontos em Γ3 , donde dim p1 ([S]) = 0.
Afirmamos que p1 (Γ3 ) = P19 . Com efeito, pelo Teorema da Dimensão das Fibras,
0 = dim p−1
1 ([S]) ≥ dim(Γ3 ) − dim p1 (Γ3 )
isto é, dim p1 (Γ3 ) ≥ dim(Γ3 ) = 19. Assim p1 é sobrejetiva.
Para uso futuro, enunciamos o resultado que acabamos de demonstrar:
Teorema 2.4. Toda superfície cúbica de P3 contém pelo menos uma reta.
Segue também do Teorema da Dimensão das Fibras que existe um aberto U ⊂ P19
tal que toda cúbica em U contém apenas um número finito de retas. Veremos a seguir
que este aberto contém o aberto de todas as superfícies suaves.
2.2
As 27 retas de uma cúbica suave em P3
Em 1849, Cayley e Salmon publicaram muitos artigos sobre superfícies cúbicas.
Cayley estabeleceu que qualquer superfície cúbica suave contém apenas um número finito
de retas, e Salmon prova que esse número é exatamente 27. Nesta parte da dissertação
daremos uma prova deste resultado. Nossa apresentação será baseada em [Ga02].
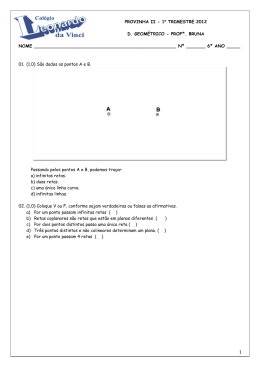
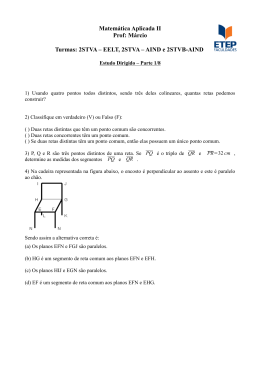
Seja S ⊂ P3 uma superfície cúbica não singular. Vimos no Teorema 2.4 que S contém
pelo menos uma reta, digamos L. A prova da existência das 27 retas em S será feita em
três etapas:
• Dada L ⊂ S, existem exatamente outras dez retas (diferentes entre si e diferentes de
L) de S que cortam L, distribuídas em 5 pares, digamos (Li , L0i ), com i = 1, . . . , 5,
tais que:
- Cada par é coplanar com L.
- Pares com i 6= j são disjuntos, isto é, não se intersectam.
Daí já segue temos que toda cúbica possui pelo menos duas retas disjuntas.
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
15
Figura 2.2: Superfície cúbica com 27 retas
• Dadas L e M duas retas de S disjuntas, existem exatamente outras 15 retas de S
com uma configuração particular.
• Da configuração das 17 retas de S obtidas na etapa anterior deduz-se que existem
exatamente outras dez retas de S que possuem uma configuração especial.
Começamos a procurar por retas em S.
Lema 2.5. Por cada ponto P ∈ S passam não mais que 3 retas contidas em S, as quais
são coplanares e não estão repetidas.
Demonstração. Se P ∈ L ⊂ S, então L = TP L ⊂ TP S. Isto é, L está no plano tangente
TP S, e a interseção S ∩ TP S, será uma curva cúbica plana passando por P , consistindo
de não mais de 3 retas, que são coplanares.
As retas obtidas não são iguais já que a superfície é não singular. De fato, suponha
que existem duas retas iguais. Por uma mudança de coordenadas podemos supor que L
é dada por z = t = 0, e que TP S é o plano definido por t = 0. Temos então as seguintes
equivalências:
L é uma reta múltipla de S ∩ TP S
m
F |TP S tem um zero duplo em z = 0
m
2
F (x, y, z, t) = z A(x, y, z, t) + tB(x, y, z, t)
com A uma forma linear e B uma forma de grau 2. Então S, dada pela equação F = 0,
seria singular nos pontos nos quais z = t = B = 0, contradição, pois S é suave.
Proposição 2.6. Dada uma reta L ⊂ S, existem exatamente outras dez retas distintas
de S que cortam L, e que estão distribuídas em 5 pares (Li , L0i ), i = 1, . . . , 5 tais que:
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
16
(a) L, Li , L0i são coplanares para cada i = 1, . . . , 5.
(b) (Li ∪ L0i ) ∩ (Lj ∪ L0j ) = ∅, se i 6= j.
Demonstração. Consideramos o plano Π contendo L, assim Π ∩ S é uma curva cúbica
plana e L ⊂ Π∩S, isto é, tal curva é a união da reta L e uma curva plana de grau 2. Esta
cônica pode ser irredutível ou degenerar em um par de retas que se cortam. Provemos
agora que existem exatamente 5 planos Πi distintos, que intersectados com S produzem
uma cônica degenerada (os pares de retas Li ∪ L0i ). De fato, podemos supor que L vem
dada pelas equações z = t = 0, então o plano Π passando por L tem uma equação da
forma µz + λt = 0 com (µ, λ) 6= (0, 0). Assim se µ 6= 0, então Π pode-se escrever pela
equação z = γt com − µλ = γ.
Assim
F|Π = t · Q(x, y, t)
onde t corresponde à reta L e Q à cônica. Por outro lado, agrupando termos podemos
escrever F como
F = Ax2 + 2Bxy + Cy 2 + 2Dx + 2Ey + H
com A, B e C formas lineares, D e E formas quadráticas e H forma cúbica, todas em
k[z, t]. Restringindo ao plano Π e observando que A, B, C, D, E e H são homogêneos,
a equação:
Q(x, y, t) = A(γ, 1)x2 + 2B(γ, 1)xy + · · · + 2E(γ, 1)ty + Ht2 = 0
define uma cônica plana que varia com γ (ou seja com ou seja com o plano Π). Portanto,
o plano Π produz uma cônica degenerada se, e só se, a matriz simétrica associada a Q
não tem posto máximo, isto é
A B D
∆(z, t) = det B C E = 0.
D E H
Mas ∆ é um polinômio homogêneo de grau 5 em duas variáveis, e portanto o número
de suas raízes contadas com multiplicidade é 5. Além disso ∆ não tem raízes múltiplas:
isto se segue do fato de que S é suave, como no Lema 2.5. Isto termina a prova de (a).
Tendo este resultado vemos que (b) é verdadeiro. De fato, suponha o contrário, isto
é, dado Li ∈ Πi ∩ S, intersecta alguma reta Lj ∈ Πj ∩ S com i 6= j. Seja P = Li ∩ Lj ∈
Πi ∩ Πj = L. Então por este ponto P passariam três retas de S não coplanares, o qual é
uma contradição com o Lema 2.5.
Note que a Proposição 2.6 nos garante a existência de duas retas disjuntas contidas
em cada cúbica suave. Para exemplificar como a configuração das retas influencia a
geometria da superfície, observamos que daí decorre o
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
17
Corolário 2.7. Toda superfície cúbica suave de P3 é racional.
Demonstração. ([Sh77, Example 2,p. 39]) Tome L, M ⊂ S duas retas disjuntas e Π um
plano que não contenha nenhuma delas. Dado p ∈ S \ (L ∪ M ), existe uma única reta
` passando por p e intersectando L e M . Então p 7→ ` ∩ Π define um mapa biracional
S → Π.
Lema 2.8. Dada uma reta L ⊂ S e os 5 pares de retas de S que a cortam, qualquer
outra reta de S corta a uma reta de cada par e não à outra.
Demonstração. Seja N ⊂ S uma reta distinta de L e dos 5 pares de retas de S que
cortam a L (Li , L0i ⊂ Πi ). Desde que uma reta e um plano tem dimensão complementar
em P3 , temos que N ⊂ Πi ou N corta a Πi em um único ponto P ∈ S.
Se N ⊂ Πi , então Πi ∩S consiste em quatro retas distintas, o qual contradiz o Teorema
de Bézout.
Por outro lado, se N corta Πi num ponto P , então como Πi ∩ S = L ∪ Li ∪ L0i , o
ponto P esta em alguma das três retas. P não esta em L desde que nesse caso N deve
ser Li ou L0i para algum i, o qual contradiz o enunciado do lema. Então N corta a Li ou
L0i em P . Se corta as duas, deve ser no ponto de interseção P = Li ∩ L0i , mais então a
existência de P contradiz o Lema (2.5), desde que por tal ponto passam três retas de S
não coplanares N, Li , L0i . Logo N corta a uma reta de cada par mas não a outra.
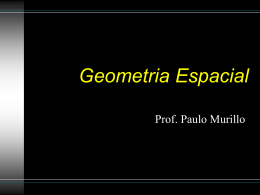
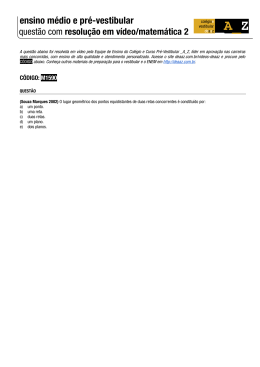
Proposição 2.9. Dadas duas retas L, M ⊂ S disjuntas, existem exatamente outras
quinze retas distintas de S (Li , L0i , L00i ), i = 1, . . . , 5, com a seguinte configuração:
• Os cinco pares (Li , L0i ) são as dez retas de S que cortam a L.
• Os cinco pares (Li , L00i ) são as dez retas de S que cortam a M .
• L0j ∩ L00i 6= ∅ se i 6= j e L0j ∩ L00i = ∅ se i = j.
Demonstração. Dadas L e M retas disjuntas de S, como na Proposição (2.6), a L correspondem cinco pares (Li , L0i ) de retas distintas de S que a cortam, e além disso, pelo
Lema (2.8), a reta M (distinta das onze anteriores por ser disjunta com L) corta a uma
reta de cada par e não a outra.
Suponhamos que M corta a todas as Li . Aplicando a Proposição (2.6) existem exatamente outras cinco retas L00i , tais que os cinco pares de retas de S que cortam a M
são as (Li , L00i ), i = 1, . . . , 5, com a mesma configuração dada pela mesma proposição.
Provemos que as retas L00i são distintas das doze retas anteriores. De fato, são distintas
de L já que cortam a M (L ∩ M = ∅); são distintas de M e de Lj , j = 1, . . . , 5, pela
Proposição (2.6), e finalmente são distintas de las L0j j = 1, . . . , 5, desde que se não M
intersecta as duas retas de algum par (Lj , L0j ), em contradição com o Lema (2.8).
Por outro lado L0j ∩L00i 6= ∅ se i 6= j, desde que pelo Lema (2.5), L00i deve cortar alguma
das retas L, Lj , L0j (intersecta Πj num ponto de S e Πj ∩ S = L ∪ Lj ∪ L0j ); e Lj ∩ L00i = ∅
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
18
Figura 2.3: Configuração das dezessete retas
se i 6= j e L ∩ L00i (tudo isto pela Proposição (2.6)). Por outro lado L0i ∩ L00i = ∅ desde que
L00i já corta a Li e não pode cortar a outro membro do par (Li , L0i ), pelo Lema (2.8).
Assim que tendo duas retas disjuntas contidas em S, tem-se outras quinze com a
configuração particular dada na Proposição (2.9).
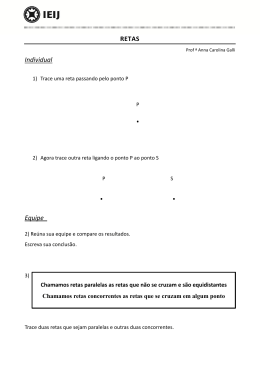
Lema 2.10. Se L1 , L2 , L3 , L4 são retas disjuntas de P3 , então
• Ou as quatro retas estão contidas numa quádrica suave de P3 e então elas tem
infinitas retas transversais comuns,
• Ou não tem nenhuma quádrica que as contenha e então possuem uma ou dois
transversais comuns.
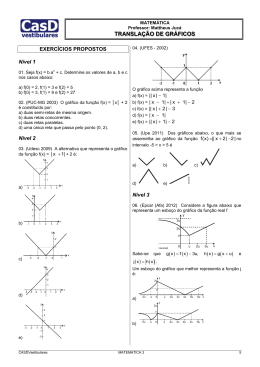
Demonstração. Dadas três retas disjuntas de P3 , digamos L1 , L2 , L3 , provemos que existe
uma quádrica não-singular Q que as contém. De fato, tome três pontos distintos em cada
reta Li , i = 1, 2, 3, em total nove pontos. O fato de conter um ponto de P3 nos dá uma
condição linear no espaço P9 de quádricas de P3 . Então se consideramos as quádricas
que contém os nove pontos anteriores, o que temos é a interseção de nove hiperplanos
gerais no nosso P9 , que consiste em um único ponto. Portanto existe uma quádrica que
contém os três pontos de cada Li e que automaticamente contém cada Li : pelo Teorema
de Bézout, uma reta fora de uma quádrica a intersecta em no máximo em dois pontos.
Por outro lado, uma quádrica singular de P3 não pode conter três retas disjuntas:
como vimos no Exemplo 2.3, as quádricas singulares são o cone quádrico, um par de
planos ou um plano duplo. Portanto Q é suave. Como também vimos no Exemplo 2.3,
Q é isomorfa a P1 × P1 via o mergulho de Segre. Via este isomorfismo, obtemos:
• Q é uma superfície regrada, com duas famílias infinitas de retas;
• Por cada ponto de Q passa exatamente uma reta de cada família;
• Duas retas de uma mesma família são disjuntas;
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
19
• Uma reta de uma família corta um membro qualquer da outra em exatamente um
ponto.
Figura 2.4: A quádrica suave de P3 .
Agora, ou L4 ⊂ Q, e então L4 pertence a mesma família de retas de Q definida por
L1 , L2 , L3 (por ser disjuntas delas) e qualquer outra reta da outra coleção é transversal
as quatro retas Li , donde existem infinitas transversais comuns; ou bem L4 * Q, e
portanto corta a Q em dois pontos (que poderiam coincidir quando a reta é tangente
à quádrica). Neste caso, as retas da outra família que passam por estes pontos são as
únicas transversais comuns a quatro retas dadas.
Faltam ainda 10 retas, que aparecerão agora!
Proposição 2.11. Sejam L, M {Li }5i=1 , {L0i }5i=1 e {L00i }5i=1 , as dezessete retas de S dadas
pela Proposição (2.9).
(a) Se N ⊂ S é uma reta de S distinta das dezessete retas anteriores, então N corta
exatamente a três retas do conjunto {Li }5i=1 .
(b) Para cada escolha de três elementos {i, j, k} do conjunto {1, . . . , 5} tem uma única
reta de S, (Lijk ), distinta das dezessete retas anteriores, que corta exatamente a
Li , Lj , e a Lk .
Demonstração.
(a) Pela Proposição (2.6), temos que as retas {Li }5i=1 são disjuntas entre sim. Dadas
quatro retas disjuntas de S, o Lema (2.10) implica que as quatro retas não podem estar
contida numa quádrica lisa, pois pelo contrário teriam infinitas retas transversais comuns.
Pelo Teorema de Bézout estas retas devem estar contidas na superfície cúbica S, desde
que a cortam em mais de três pontos, então S deverá conter a quádrica e portanto não
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
20
seria irredutível, contradizendo nossa hipóteses. Assim as quatro retas disjuntas tem uma
ou duas transversais comuns.
Agora se N cortasse mais de três retas Li , de novo pelo Lema 2.10, estas retas disjuntas
teriam mais de dois transversais em comum: N , L, M , e chegamos a uma contradição.
Se N corta menos de três retas Li , então cortaria a três ou mais das L0i (pelo Lema
(2.8)). Se por exemplo N intersecta L5 e a L01 , L02 , L03 (e a L4 ou L04 ), estas quatro
retas de S que são disjuntas pela Proposição (2.6), possuem mais de duas transversais
comuns: N , L e L005 , o que de novo é impossível. Portanto N corta exatamente três retas
do conjunto {Li }5i=1 .
(b) Consideremos a reta L1 ⊂ S. Pela Proposição (2.6), tem exatamente dez
retas distintas de S que a cortam. Destas dez até agora temos quatro: L,M ,
L01 e L00i . Cada uma das seis retas faltantes (que pelas configurações dadas nas
proposições (2.6) e (2.9), não podem ser nenhuma das doze retas restantes no conjunto {L, M, {Li }5i=1 , {L0i }5i=1 , {L00i }5i=1 }), corta exatamente a um par de retas entre
L2 , . . . , L5 ,(por (a)).
Como existem seis dos ditos pares, todas as possibilidades acontecem e isto nos dá
uma única reta L1jk , para cada {j, k} entre {2, 3, 4, 5}, nas condições do item (b). O
argumento com L1 repete-se com o resto das retas Li e isto termina a prova.
Este último resultado nos fornece, a partir da configuração das dezessete retas que se
obtém da Proposição (2.9), exatamente outras dez retas de S (uma por cada subconjunto
de três elementos tomados de um com cinco elementos) provando assim que não pode ter
mais.
Com as três proposições, provamos o célebre resultado:
Teorema 2.12. Toda superfície cúbica não singular em P3 contém exatamente 27 retas.
Com a notação usada, as retas são as seguintes:
{L, M, {Li }5i=1 , {L0i }5i=1 , {L00i }5i=1 , Lijk }
ou seja,
2 + 5 + 5 + 5 + 10 = 27.
Em resumo, obtemos a seguinte configuração das 27 retas:
• L corta a {Li }5i=1 , {L0i }5i=1 .
• L1 corta L, M , L001 e q Lijk , para as seis possíveis escolhas {j, k} ⊂ {2, 3, 4, 5}.
• L01 corta a L, L1 , as quatro retas {L00j }5j=2 e a Lijk para as quatro escolhas possíveis
{i, j, k} ⊂ {2, 3, 4, 5}.
• L00i corta a M , L1 , as quatro retas {L0j }5j=2 e a Lijk para as quatro escolhas possíveis
{i, j, k} ⊂ {2, 3, 4, 5}.
CAPÍTULO 2. RETAS EM SUPERFÍCIES CÚBICAS
21
• L123 corta a L1 , L2 , L3 , L145 , L245 , L345 , L04 , L05 , L004 , L005 .
Mais propriedades sobre as configurações dessas retas e superfícies cúbicas de maneira
geral podem ser obtidas, por exemplo, em [Hart77, V.4, p. 395] ou na dissertação de
mestrado de Cleber Haubrichs [Haub01], bem como nas referências ali contidas.
Capítulo 3
Retas em superfícies
3.1
Superfícies da Forma φ(x, y) = ψ(z, t)
Nesta seção estudaremos o método encontrado no artigo de S. Boissière e A. Sarti
[BS07], que fazem um estudo para produzir superfícies com muitas retas. Em geral
é difícil construir superfícies não singulares contendo retas. Um dos casos mais bem
sucedidos são as superfícies suaves dadas por equações da forma:
F (x, y, z, t) = φ(x, y) − ψ(z, t) = 0
onde φ e ψ são polinômios homogêneos de grau d. Segre [Seg47] dá uma completa
descrição no caso d = 4, mostrando que nesse caso os possíveis números de retas são
16, 32, 48 e 64. Estes números são determinados estudando-se automorfismos de P1 entre
os conjuntos de quatro pontos dos φ e ψ.
Ilustremos isto com o seguinte exemplo.
Exemplo. (A quártica de Schur) Consideremos a superfície quártica S ∈ P3 , definida
em termos das coordenadas homogêneas [X, Y, Z, W ] sobre P3 , pela equação
X(X 3 − Y 3 ) = Z(Z 3 − W 3 ).
Esta superfície contém exatamente 64 retas. De fato, sejam L e M , as duas retas em P3
dadas por Z = W = 0, e X = Y = 0 respectivamente, onde L intersecta S nos quatro
pontos
p1 = [0 : 1 : 0 : 0] ,
p2 = [1 : 1 : 0 : 0]
p3 = [1 : ω : 0 : 0] ,
p4 = [1 : ω 2 : 0 : 0]
sendo ω a raiz cúbica da unidade; e igualmente M intersecta S nos quatro pontos
q1 = [0 : 0 : 0 : 1] ,
q3 = [0 : 0 : 1 : ω] ,
q2 = [0 : 0 : 1 : 1]
q4 = [0 : 0 : 1 : ω 2 ].
Observamos que S contém as 16 retas Li,j = pi qj , para 1 ≤ i, j ≤ j. A figura (2.4),
representa tais retas, as quais chamaremos do tipo I.
22
CAPÍTULO 3. RETAS EM SUPERFÍCIES
23
Figura 3.1: Configuração das 16 retas
Agora observamos que os pontos pi ∈ L formam uma configuração de 4 pontos sobre
P com o maior número possível de simetrias, e também para os pontos qi ∈ M . Com
efeito, para qualquer permutação par σ ∈ A4 do conjunto {1, 2, 3, 4}, existe um único
isomorfismo ϕσ : L → M entre as duas retas, levando o ponto pi para o ponto qσ(i) para
i = 1, 2, 3, 4. A superfície
[
Qσ =
p, ϕσ (p)
1
p∈L
dada como a união da retas em P3 unindo os pontos de L para suas respectivas imagens
em M pelo ϕσ , sendo esta uma superfície quádrica suave. A interseção com S contém
as quatro retas Li,σ(i) , i = 1, 2, 3, 4 todas as quais pertencem a uma relação de Qσ ;
a interseção com S portanto consiste desses quatro retas e quatro retas adicionais da
segunda relação de Qσ , ( isto é, a relação incluindo as retas L e M ).
As quatro retas são distintas desde que as duas superfícies Qσ e S tem diferentes
graus. Denotando tais retas como Mσ,i , i = 1, 2, 3, 4, e chamemos tais retas do tipo II.
Note que as quatro retas são distintas das 16 retas Li,j (elas são oblíquas a L e M , com as
Li,j não o são), e que nenhuma das quatro retas pode estar sobre uma segunda quádrica
Qσ0 (a interseção de qualquer duas quádricas Qσ e Qσ0 consiste da duas retas L e M e
duas retas da primeira relação ). Desde que existem 12 permutações ϕ, chegamos assim
a 48 retas {Mσ,i } distintas todas elas e das retas Li,j , obtemos em total 64 retas contidas
em S.
De fato, essas são todas as retas de S, como demonstraremos mais adiante.
Agora generalizaremos o método para todos os graus, entrando em detalhe na configuração de tais retas, dando uma descrição de todos os possíveis números, e concluímos
determinando o número maximal de retas para tais superfícies.
Sejam Z(φ) e Z(ψ) respectivamente o conjunto de zeros de φ(x, y) e ψ(z, t) em P1 .
CAPÍTULO 3. RETAS EM SUPERFÍCIES
24
Teorema 3.1. Seja F (x, y, z, t) = φ(x, y) − ψ(z, t) a equação de uma superfície suave S
de grau d em P3 . Então o número Nd de retas sobre S é exatamente:
Nd = d(d + αd )
onde αd é o ordem do grupo de isomorfismos de P1 que mapeia Z(φ) para Z(ψ).
Demonstração. Sejam as retas L : {z = t = 0} e L0 : {x = y = 0}. Então vemos que,
S ∩ L = Z(φ) e S ∩ L0 = Z(ψ).
Afirmação 1. Desde que a superfície S é suave, os polinômios homogêneos φ e ψ
tem zeros simples.
De fato, por exemplo para o polinômio φ, se [a, b] ∈ P1 é tal que φ pode ser fatorizado
por (bx − ay)2 , então ∂x φ(a, b) = ∂y φ(a, b) = 0, e o ponto [a : b : 0 : 0] ∈ P1 é um ponto
singular de S (de igual forma para ψ). Reciprocamente, é obvio que se φ e ψ tem só
zeros simples, então S é suave.
Agora consideremos os conjuntos Z(φ) = {P1 , P2 , . . . , Pd } , Z(ψ) = {P10 , P20 , . . . , Pd0 }.
Afirmação 2. Cada reta Li,j unindo o ponto Pi para Pj0 esta contido em S.
De fato, se Pi = [xi : yi : 0 : 0] e Pj0 = [0 : 0 : zj0 : t0j ], a reta Li,j unindo eles, consiste
dos pontos [λxi : λyi : µzj0 : µt0j ] com [λ : µ] ∈ P1 , onde vemos que estão contidas na
superfície desde que os polinômios φ e ψ são homogêneos. Assim encontramos d2 retas
contidas em S.
Afirmação 3. Cada reta contida em S interceptando L e L0 é uma destas retas.
De fato, Se D é tal reta, temos os conjuntos D ∩ L = {[a : b : 0 : 0]} e D ∩ L0 = {[0 :
0 : c : d]}, então F (a, b, 0, 0) = φ(a, b) = 0, assim [a : b : 0 : 0] é um dos pontos Pi e
similarmente obtém-se que [0 : 0 : c : d] é um dos Pj0 .
Afirmação 4. Seja D uma reta contida em S e não interceptando L, então D não
intersecta a L0 (e vice-versa).
De fato, a equação de tal reta D é dada por dois equações independentes:
ax + by + cz + dt = 0
0
a x + b0 y + c0 z + d0 t = 0
Desde que D não intersecta L, o sistema
ax + by = 0
a0 x + b 0 y = 0
tem posto dois, assim podemos escrever as equações de D como as seguintes equações
independentes
x = αz + βt
y = γz + δt
α β
0
Então D não intersecta L , do contrario a matriz
, teria posto um, e seria
γ δ
uma contradição.
CAPÍTULO 3. RETAS EM SUPERFÍCIES
25
Afirmação 5. As equações da reta D definem um isomorfismo linear entre as retas
L e L, induzindo uma bijeção entre Z(ψ) e Z(φ).
De fato, sendo Pj0 = [0 : 0 : c : d], então a := αc + βd e b := γc + δd, tem a propriedade
que [a : b : c; d] ∈ D ⊂ S, assim ψ(a, b) = F (a, b, c, d)+φ(c, d) = 0, desde que [a : b : 0 : 0]
é um zero de ψ.
Reciprocamente, seja σ : L0 → L um isomorfismo mapeando os pontos Pj0 para os
α β
pontos Pi , e
a matriz definindo σ. Consideremos a superfície quádrica suave
γ δ
0
Qσ : x(γz + δt) − y(αz + βt)
que vem dada pela união dos pontos de L0 e L. A primeira relação é a familia de retas
(p, σ(p)) com p ∈ L0 . Para p = [c : d], essas retas são dadas pelas equações
I[c:d] :=
(γc + δd)x − (αc + βd)y = 0
dz − ct = 0
A segunda relação consiste na familia de retas dadas pelas equações
ax − b(αz + βt) = 0
II[a:b] :=
ay − b(γz + δt) = 0
para [a : b] ∈ P1 . Estas relações pertencem as retas L([a : b] = [0 : 1]), L0 ([a : b] = [1 : 0])
e D([a : b] = [1 : 1])
Em cada relação, as retas são disjuntas uma da outra, e cada reta de uma relação
intersecta cada reta da outra relação. Por outro lado, desde que a interseção S ∩Q contém
exatamente as d retas diferentes (Pj0 , σ(Pj0 )) da primeira relação, esta também contém d
retas da segunda relação. De fato, consideremos uma reta da primeira relação que não
esta contida em S, então esta intersecta S em d pontos, e por cada um desses pontos
passa uma reta da segunda relação, que também intersecta as d retas da primeira relação
contidas em S, assim essas retas da segunda relação intersecta S em d + 1 pontos. Logo,
pelo Teorema de Bézout, estão contidas em S.
Mais por este argumento não é claro que estas d retas sejam diferentes, para isto,
denotemos Ud o grupo das d-ésima raízes da unidade . O grupo Ud × Ud atua sobre P3
como segue
(ξ.η) · [x : y : z : t] = [ξx : ξy : ηz : ηt]
onde vemos que esta ação de grupo deixa globalmente invariante a superfície S desde que
os polinômios φ e ψ são homogêneos de grau d.
Por outro lado observamos que as retas da primeira relação são invariantes por esta
ação, mais para a segunda relação, tem-se que
(ξ, η) · II[a:b] = II[ξ−1 a:η−1 b]
CAPÍTULO 3. RETAS EM SUPERFÍCIES
26
Isto é, cada reta da segunda relação produz uma órbita de comprimento d por esta
ação de grupo. Desde que por exemplo pode-se ver que (ξ, η) · II[a:b] = (η, ξ) · II[a:b] para
qualquer ξ, η ∈ Ud .
Logo, desde que a superfície S contém pelo menos uma reta da segunda relação, esta
contém toda a órbita, assim obtemos d retas diferentes.
Portanto, cada isomorfismo σ : L0 → L mapeando Z(ψ) para Z(φ) nos proporciona d
retas, e aqui não existem outras retas distintas. Além disso, para dois isomorfismos diferentes, as retas correspondentes são distintas, desde que a matriz definindo os isomorfismos
não são proporcionais.
Denotemos por αd o número de isomorfismos σ : L0 → L mapeando Z(ψ) para Z(φ). O
procedimento feito anteriormente prova que o número exato de retas contidas na superfície
S é:
Nd = d2 + αd d.
Agora acharemos o possíveis valores maximais de Nd ou equivalentemente de αd . Para
isto, sabe-se que para d = 3, temos αd = 6. Logo, sendo Γd o conjunto de isomorfismos
de P1 atuando em d pontos, este define um grupo finito de automorfismos de P1 . Para
isto, estudaremos os cinco tipos de subgrupos finitos de SO(3, R), ou equivalentemente
P GL(2, C), chamados Grupos Poliedrais:
(a) O Grupo Cíclico Ck ∼
= Z/kZ, de ordem k ≥ 2, isomorfo ao grupo de isometrias de
um polígono regular com k vértices no plano.
(b) O Grupo Diedral Dk ∼
= Z/kZ × Z/2Z, de ordem 2k, k ≥ 2, isomorfo ao grupo de
isometrias de um polígono regular com k vértices no espaço.
(c) O Grupo T de isometrias positivas de um Tetraedro regular, isomorfo ao grupo
alternado A4 de ordem 12.
(d) O Grupo O de isometrias positivas de um Octaedro regular ou um cubo, isomorfo
ao grupo simétrico S4 de ordem 24.
(e) O Grupo I de isometrias positivas de um Icosaedro regular, ou um Dodecaedro
regular, isomorfo ao grupo alternado A5 de ordem 60.
No que segue descreveremos os geradores desses grupos e suas órbitas sobre P1 . Para
uma melhor referência ver [Mon88]
Procederemos a descrição para todos os possíveis grupos de isomorfismos (d ≥ 4):
(1) Γd = {id}. Este não é possível para d = 4 desde que existem como mínimo 4
automorfismos de um conjunto de quatro pontos em P1 .
CAPÍTULO 3. RETAS EM SUPERFÍCIES
27
Figura 3.2: Poliedros Regulares
(2) Γd é o grupo cíclico: Γd ∼
= Z/kZ (k ≥ 2) com gerador σ(t) = ξt, onde ξ é uma
k-ésima raiz da unidade. A ação de σ sobre P1 tem dois pontos fixos {0, ∞}, e todos
os outros pontos geram uma órbita de comprimento k. Assim dependendo de como
os pontos fixos estão em dado conjunto de d pontos ou não, temos a decomposição:
d = α + βk
com α ∈ {0, 1, 2} e β ≥ 1. Olhemos cada caso:
• α = 0. Os pontos são:
{µ1 , µ1 ξ, . . . , µ1 ξ k−1 }, . . . , {µβ , µβ ξ, . . . , µβ ξ k−1 }.
onde µ0i s são tomados arbitrariamente, eles são distintos, e em particular não
são β-ésima raiz da unidade, e suas k-potências λi := µki são distintas. Aqui
obtemos que β ≥ 3, desde que se β = 1 ou β = 2, então t 7→ 1/t ou t 7→
µ2 /(µ1 t) geram o grupo diedral. Para β ≥ 3 não existem outros isomorfismos
.
• α = 1. Os pontos são:
{0}, {µ1 , µ1 ξ, . . . , µ1 ξ k−1 }, . . . , {µβ , µβ ξ, . . . , µβ ξ k−1 }.
Aqui não existem outros isomorfismos sempre que d = 1 + βk ≥ 5. Para k = 3
e β = 1 existem outros isomorfismos (o grupo tetraedral).
• α = 2. Os pontos são:
{0, ∞}, {µ1 , µ1 ξ, . . . µ1 ξ k−1 }, . . . , {µβ , µβ ξ, . . . , µβ ξ k−1 }.
Igualmente que no caso α = 0, tem-se que β ≥ 3.
Assim obtemos, para o grupo Γd sendo o grupo cíclico Z/kZ (d ≥ 4, k ≥ 2):
Q
- d = βk, β ≥ 3, por exemplo φ(x, y) = βi=1 (xk − λi y k );
Q
- d = 1 + βk ≥ 5, β ≥ 1 se k = 3, por exemplo φ(x, y) = x βi=1 (xk − λi y k );
Q
- d = 2 + βk, β ≥ 3, por exemplo φ(x, y) = xy βi=1 (xk − λi y k ).
CAPÍTULO 3. RETAS EM SUPERFÍCIES
28
(3) Γd é o grupo Diedral: Γ ∼
= Z/kZ × Z/2Z (k ≥ 2) com geradores σ(t) = ξt e
s(t) = 1/t, onde ξ é uma raiz k-ésima da unidade. A ação do grupo Diedral sobre
P1 tem una órbita de comprimento 2, {0, ∞}, e uma órbita de comprimento k
gerado por 1. Assim temos a decomposição:
d = 2α + βk + γ2k
com α, β ∈ {0, 1}, γ ≥ 0:
• γ = 0, α = 0, e β = 1. Os pontos são:
{1, ξ, . . . , ξ k−1 }
Então d = k e φ(x, y) = xk − y k . Esta é a superfície de Fermat dada.
• γ = 0, α = 1, e β = 1. Os pontos são:
{0, ∞}, {1, ξ, . . . , ξ k−1 }
Aqui obtemos que k 6= 2, 4. Se k = 2, a condição é isomorfa ao caso seguinte
(com 2k), e contém mais isomorfismos, e se k = 4, existem outros isomorfismos
gerando o grupo Octaedral. Então d = 2 + k, e φ(x, y) = xy(xk − y k ).
• γ 6= 0. Então d ∈ {2kγ, 2 + 2kγ, k + 2kγ, 2 + k + 2kγ} e φ contém, além dos
casos seguintes, γ fatores da forma (xk − λy k )(xk − λ1 y k ).
(4) Γd é o grupo Tetraedral T . O grupo T é gerado por:
σ(t) = ωt,
s(t) =
1−t
1 + 2t
atuando sobre o conjunto {0, 1, ω, ω 2 }, onde ω é uma raiz cúbica primitiva da
unidade. A ação de T sobre P1 tem dois órbitas de comprimento quatro:
{0, 1, ω, ω 2 }, {∞,
−1 −1 −1 2
,
ω,
ω }
2 2
2
√
e uma órbita de comprimento seis gerado pelo ponto fixo ω√ = −1−2 3 de s, onde
também temos que o segundo ponto fixo é dado por ω 0 = −1+2 3 o qual esta sobre a
mesma órbita desde que ω = σ 2 sσ(ω 0 ). Onde vemos que essas são todas as órbitas
de comprimento quatro e seis. Assim temos a decomposição
d = 4α + 6β + 12γ
com α ∈ {0, 1, 2}, β ∈ {0, 1}, γ ≥ 0:
• γ = 0, β = 0 e α = 1: o grupo de isomorfismos é T .
CAPÍTULO 3. RETAS EM SUPERFÍCIES
29
• γ = 0, β = 0 e α = 2: o grupo de isomorfismos seria O, desde que t 7→ −1/(2t)
troca as órbitas de comprimento quatro.
• γ = 0, β = 1 e α = 0: o grupo de isomorfismos seria O, desde que a órbita de
comprimento seis é estabilizado por t 7→ −1/(2t).
• γ = 0, β = 1 e α = 1: o grupo de isomorfismos é T , porque este não está
contido em qualquer grupo diedral e os grupos O ou I não tem órbita de
comprimento quatro ou dez.
• γ = 0, β = 1 e α = 2: como acima o grupo de isomorfismos é O.
• Para γ 6= 0, em geral o grupo de isomorfismos é T mais para pontos especiais
este seria O ou I.
Por exemplo, para o grupo tetraedral considere φ(x, y) = x(x3 − y 3 ), como vimos
no exemplo dado.
(5) Γd é o grupo Octaedral O. O grupo O é gerado por:
σ(t) = it,
1
s(t) = ,
t
a(t) =
t+i
t−i
atuando sobre o conjunto {0, ∞, 1, i, −1, −i}. A ação de O sobre P1 tem uma
órbita de√comprimento
seis, uma órbita de comprimento oito
gerado
pelo ponto fixo
√
√
√
1+i+ 3+i 3
1+i− 3−i 3
0
de a, sendo o segundo ponto fixo ω =
o qual está sobre
ω=
2
2
0
a mesma órbita desde que ω = saσs(ω), e uma órbita de comprimento 12 gerado
√
pelo ponto fixo z = −1 + 2 do isomorfismo r(t) = 1−t
, também o outro ponto fixo
1+t
√
0
é z = −1 − 2 o qual está na mesma órbita desde que z 0 = σrσa(z). Esses são
todas as órbitas de comprimento seis, oito e doze. Assim temos a decomposição:
d = 6α + 8β + 12γ + 24δ
com α, β, γ ∈ {0, 1}, δ ≥ 0. Desde que o grupo O não está contida em I nem em
qualquer grupo diedral, todas as escolhas de α, β, γ, δ são possíveis para ser Γd ∼
= O.
(6) Γd é o grupo Icosaedral I. O grupo O é gerado por:
p5 (t) =
τt + τ − 1 + i
,
(−τ + 1 + i)t + τ
q1 (t) = −t,
√
q2 (t) = −
1
t
onde τ = 1+2 5 . Esta tem uma órbita de comprimento doze gerado por um ponto
fixo de p5 , a órbita de comprimento 20 é gerada por um ponto fixo de p25 q2 (que
tem ordem três), é uma órbita de comprimento 30 gerada por um ponto fixo de q1 .
Esses são todas as órbitas. Assim temos a decomposição:
d = 12α + 20β + 30γ + 60δ
com α, β, γ ∈ {0, 1}, δ ≥ 0. Todas as escolhas dá Γ ∼
= I.
CAPÍTULO 3. RETAS EM SUPERFÍCIES
30
Como uma consequência imediata do Teorema (3.1) e da discussão feita acima temos:
Proposição 3.2. O numero máximo de retas em S são:
• Nd = 3d2 para d ≥ 3, d 6= 4, 6, 6, 12, 20;
• N4 = 64, N6 = 180, N8 = 256, N12 = 864, N20 = 1600.
Demonstração. Da discussão feita acima, pode-se ver que o αd = 2d é maximal quando o
grupo de automorfismos não pode ser os grupos T , O ou I, e que α4 = 12, α6 = α8 = 24
e α12 = α20 = 60 são maximais. Para outros valores de d, se o grupo de automorfismos
é T , O, ou I, então o número de retas é respectivamente:
d2 + 12,
d2 + 24,
d2 + 60
e esses números são maiores que 3d2 só se, respectivamente:
d < 6,
d < 12,
d < 30
Por outro lado vemos que se d = 10 não é possível para O e I, e que os graus
d = 14, 16, 18, 22, 24, 26, 28 não são possíveis para I, isto desde que não podemos decompor tal d como uma suma das longitudes das órbitas dos grupos O ou I. Isto é claro com
as restrições sobre os números de órbitas de cada tipo.
Exemplos
(1) Para d genérico, a superfície de Fermat F (x, y, z, t) = (xd − y d ) − (z d − td ), é um
bom exemplo de uma superfície da forma φ(x, y) − ψ(y, t), tendo esta 3d2 retas
contida nela.
(2) Para d = 4, Γ4 ∈ {∅, D2 , D4 , ; T }. Assim os número possíveis para tais superfícies
são: 16, 32, 48, 64.
(3) Para d = 5, Γ4 ∈ {∅, {Id}, C4 , D3 , D5 }. Assim os números possíveis para tais
superfícies são: 25, 30, 45, 55, 75.
(4) Para d = 6, Γ4 ∈ {∅, {Id}, C2 , D2 , D3 , D6 , O}. Assim os números possíveis
para tais superfícies são: 36, 42, 48, 60, 72, 108, 180.
3.2
Superfícies da Forma td = f (x, y, z)
Consideramos agora superfícies de grau d ≥ 3 dado como um recobrimento de P2
ramificado ao longo de uma curva plana.
CAPÍTULO 3. RETAS EM SUPERFÍCIES
31
Sejam C: f (x, y, z) = 0 uma curva plana definida por um polinômio homogêneo f de
grau d e a superfície S em P3 dada pela equação:
F (x, y, z, t) = td − f (x, y, z).
Observamos que S é suave se, e somente se, C é suave.
Tome o = (0 : 0 : 0 : 1) ∈ P3 e seja π : S → P2 a restrição da projeção
(P3 − {o}) → P2 ,
(x : y : z : t) 7→ (x : y : z).
Então π é um d-recobrimento S → P2 , ramificado ao longo da curva C, onde #π −1 (p) = 1,
se p ∈ C e #π −1 (p) = d se p 6∈ C.
Seja p um ponto de C e L a reta tangente de C em p. Dizemos que p é um d-ponto
ou um ponto de inflexão total, se a multiplicidade de interseção Ip (L, C) de C e sua reta
tangente em p é igual a d.
Após uma mudança de coordenadas, podemos supor que a reta L vem dada pela
equação y = 0 e p = (0 : 0 : 1). Com esta escolha podemos escrever:
f (x, 0, 1) = axm + termos de grau superior
(3.1)
e portanto Ip (L, C) = m. Assim, q é um ponto de inflexão se m ≥ 3, e é um d-ponto se
e somente se
f (x, 0, z) = axd
(3.2)
onde a = f (1, 0, 1).
Lema 3.3. Assuma a notação acima. Então:
(1) Se L é uma reta contida em S, então π(L) é uma reta.
(2) Se p é um ponto de inflexão total, então π −1 (L) contém exatamente d retas distintas,
todas passando pelo ponto p = (0 : 0 : 1 : 0) em P3 .
(3) Se ` ⊂ P2 é uma reta qualquer e π −1 (`) contém uma reta, então ` é tangente a C um
ponto de inflexão total.
Demonstração.
(1) O resultado é imediato pois π é uma projeção.
(2) Seja q = (0 : 1 : 0) ∈ L. Como p é de inflexão total, temos que q 6∈ C e logo π −1 (q)
consiste de d pontos distintos da forma (1 : 0 : 1 : α), onde αd = f (1 : 0 : 1). Seja
M ⊂ P3 a reta passando por (0 : 0 : 1 : 0) e (1 : 0 : 1 : α). Então M é dada por
(b : 0 : a + b : bα) com (a : b) ∈ P1 ou ainda pelas equações
y=0
e
t = αx
em P3 .
(3.3)
CAPÍTULO 3. RETAS EM SUPERFÍCIES
32
Vamos provar que M ⊂ S: de fato,
M ⊂ S ⇐⇒ F (x, 0, z, αx) = 0 ⇐⇒ αd xd − f (x, 0, z) = 0
(3.4)
o que vale por (3.2), pois αd = f (1, 0, 1).
Assim π −1 (L) contém d retas e qualquer reta contida em π −1 (L) tem que ser uma
dessas, pois contém as pré-imagens de p e q.
(3) Podemos supor p = (0 : 0 : 1) ∈ ` ∩ C e que ` é dada por y = 0. Seja M ⊂ π −1 (`).
Então as equações de M em P3 são dadas como em (3.3), onde αd = f (1 : 0 : 1).
Logo (3.4) é válida, donde concluímos que p é um ponto de inflexão total de C e `
é a tangente de C em p.
Agora deduzimos o número de retas contidas em tais superfícies:
Teorema 3.4. Seja C uma curva plana suave de grau d com N pontos de inflexão total.
Seja f (x, y, z) = 0 a equação que define C e considere a superfície S ⊂ P3 dada pela
equação:
F (x, y, z, t) = td − f (x, y, z).
Então S contém exatamente N ·d retas. Em particular S contém no máximo 3d2 retas.
Demonstração. Como vimos no Lema (3.3), toda reta em S provém de uma tangente de
C em um ponto de inflexão total e cada tal ponto produz exatamente d retas em S. Logo
S contém exatamente N ·d retas. Por outro lado, seja
fxx fxy fxz
H = det fyx fyy fyz
fzx fzy fzz
a Hessiana de f . Então (veja [Ful69]) p é um ponto de inflexão de C se e somente se
p∈C ∩H e
p é de inflexão total ⇐⇒ Ip (H, C) = d − 2.
Por outro lado, do Teorema de Bézout, grau(H · C) = 3d(d − 2) e portanto C tem no
máximo 3d pontos de inflexão total, donde concluímos a última afirmação do enunciado.
Por exemplo:
• Para d = 3, temos as cúbicas planas suaves. Aqui todo ponto de inflexão é total
e do Teorema de Bézout segue que são 9 ao todo. Portanto a superfície cúbica
induzida é suave e contém 9·3 = 27 retas, como esperado!
CAPÍTULO 3. RETAS EM SUPERFÍCIES
33
• As curvas de Fermat xd + y d + z d = 0 são exemplos de curvas cujos pontos de
inflexão são todos totais, sendo 3d ao todo. Assim, as Superfícies de Fermat
xd + y d + z d + td = 0
são exemplos de superfícies com 3d2 retas.
3.3
O número máximo de retas em uma superfície
Seja `(d) o número máximo de retas que uma superfície suave de grau d em P3 pode
conter. Quando d = 1, 2 então evidentemente `(d) = ∞ e como vimos no Capítulo 2,
`(3) = 27.
Para graus superiores, o único valor conhecido é para d = 4: Segre [Seg43], usando
métodos geométricos engenhosos, provou que `(4) = 64. Os resultados das seções anteriores nos dão cotas inferiores para `(d). Assim, por exemplo,
`(5) ≥ 75,
`(6) ≥ 180,
`(8) ≥ 256,
etc.
e em geral `(d) ≥ 3d2 . Mas estas não são as melhores cotas conhecidas. Por exemplo,
em [BS07, Prop. 5.2] mostra-se que a superfície de grau 8
S8 : x8 + y 8 + z 8 + t8 + 168x2 y 2 z 2 t2 + 14(x4 y 4 + x4 z 4 + x4 t4 + y 4 z 4 + y 4 t4 + z 4 t4 ) = 0
possui exatamente 352 retas.
Buscamos agora por cotas superiores para `(d). Começamos com uma observação
simples indicada em [Vol03]. Seja S ⊂ P3 uma superfície suave. Um ponto p ∈ S é dito
flecnodal e uma reta L é chamada reta flecnodal se Ip (S, L) ≥ 4. Daí temos a
Proposição 3.5. Uma superfície S suave de grau d ≥ 3 não pode conter mais do que
d(11d − 24) retas.
Demonstração. É Um resultado clássico de [Sal1874, p. 277] é que o conjunto dos pontos
flecnodais de uma superfície suave de grau ≥ 4 formam uma curva contida em S, chamada
a curva flecnodal de S e o grau desta curva é exatamente d(11d − 24). Como toda reta
contida em S é automaticamente flecnodal, o resultado se segue.
Em [Vol03, Cor. 1] há uma extensão desse resultado sobre corpos em característica
positiva.
Entretanto, a melhor cota uniforme conhecida é a de Segre [Seg43], a saber
`(d) ≤ (d − 2)(11d − 6)
que é ótima para d = 3 mas já não o é para d = 4. Para encerrar o trabalho, mostramos,
de maneira breve, que esta cota pode ser melhorada em casos especiais.
CAPÍTULO 3. RETAS EM SUPERFÍCIES
34
Seja L uma reta contida em S e considere |H| o sistema linear de planos H passando
por L. Então H ∩ S = L ∪ Γ, onde Γ é a curva residual de L, de grau d − 1. O sistema
|Γ| é descrito com minúcia por Segre em [Seg43]: é livre de pontos de base e qualquer
curva Γ não contém L como componente. Temos então:
Proposição 3.6. ([Seg43]) Ou cada curva Γ intersecta L em d − 1 pontos que são de
inflexão para Γ, ou os pontos de L que são inflexões de Γ são em número de 8d − 14. Em
particular, neste caso L não intersecta mais do que 8d − 14 retas contidas em S.
Seguindo Segre, L é chamada uma reta do segundo tipo se ela intersecta cada Γ em
d − 1 pontos de inflexão.
Proposição 3.7. ([BS07, Prop. 6.2]) Assuma que S contenha d retas coplanares, nenhuma delas do segundo tipo. Então S contém no máximo d(7d − 12) retas.
Demonstração. Seja Π o plano contendo essas d retas distintas. Então elas formam toda
a interseção de Π com S. Daí cada outra reta de S deve cortar Π em alguma dessas retas.
Pela Proposição 3.6, cada uma das d retas no plano intersecta no máximo 8d − 14 retas,
e logo no máximo 8d − 14 − (d − 1) retas fora do plano. Assim o número total de retas é
d + d(7d − 13) = d(7d − 12).
Referências Bibliográficas
[BS07]
Boissière, S., Sarti, A., Counting lines on surfaces, Ann. Sc. Norm. Super.
Pisa Cl. Sci. (5) 6 (2007), no. 1, 39–52.
[CHM95]
Caporaso, L., Harris, J., Mazur, B., How many rational points can a curve
have? em The moduli space of curves, Progr. Math., vol. 129, 13–31 (1995).
[Ful69]
Fulton, W., Algebraic Curves, W. A. Benjamin, 1969.
[Dolg04]
Dolgachev, I., Luigi Cremona and cubic surfaces, arXiv:math/0408283
(2004).
[Ga02]
Gallo, María J. V., Las 27 rectas de una superficie cúbica, La Gaceta de la
Real Sociedad Matemática Española, Vol. 5, no. 2, 271–296 (2002).
[Harr92]
Harris, J., Algebraic Geometry – A First Course, Springer-Verlag, 1992.
[Hart77]
Hartshorne, R., Algebraic Geometry, Springer-Verlag New York, 1977.
[Haub01]
Haubrichs, C., Superfícies cúbicas projetivas não-singulares, dissertação de
mestrado, IMPA, 2001.
[Mon88]
Mondek, P., Os Grupos de Automorfismos da Esfera de Riemann, Dissertação
de Mestrado, IMPA, 1988.
[Sal1874]
Salmon, G., A Treatise on the Analitic Geometry of three Dimensions, Vol 2,
p. 292, Dublin: Hodges, Foster & co., 1874.
[Sar01]
Sarti, A., Pencils of symmetric surfaces in P3 , J. Algebra 246, (2001), no 1,
429–452.
[Schur1882] Schur, F., Math. Ann. 20, (1882), 84.
[Seg47]
Segre, B., On arithmetical properties of quartic surfaces, Proc. London Math.
Soc. (2), 49, (1947), 353–395.
[Seg43]
Segre, B., The maximum number of lines lying on a quartic surface, Quart.
J. Math., Oxford Ser. 14, (1943), 86–96.
35
REFERÊNCIAS BIBLIOGRÁFICAS
36
[Sh77]
Shafarevich, I. R., Basic Algebraic Geometry I, Springer-Verlag, 1977.
[Vol03]
Voloch, J. F., Surfaces in P3 over finite fields, Contemp. Math. 324, 219–226
(2003).
[Za71]
Zariski, O., Algebraic surfaces, Springer-Verlag, 1971.
Livros Grátis
( http://www.livrosgratis.com.br )
Milhares de Livros para Download:
Baixar livros de Administração
Baixar livros de Agronomia
Baixar livros de Arquitetura
Baixar livros de Artes
Baixar livros de Astronomia
Baixar livros de Biologia Geral
Baixar livros de Ciência da Computação
Baixar livros de Ciência da Informação
Baixar livros de Ciência Política
Baixar livros de Ciências da Saúde
Baixar livros de Comunicação
Baixar livros do Conselho Nacional de Educação - CNE
Baixar livros de Defesa civil
Baixar livros de Direito
Baixar livros de Direitos humanos
Baixar livros de Economia
Baixar livros de Economia Doméstica
Baixar livros de Educação
Baixar livros de Educação - Trânsito
Baixar livros de Educação Física
Baixar livros de Engenharia Aeroespacial
Baixar livros de Farmácia
Baixar livros de Filosofia
Baixar livros de Física
Baixar livros de Geociências
Baixar livros de Geografia
Baixar livros de História
Baixar livros de Línguas
Baixar livros de Literatura
Baixar livros de Literatura de Cordel
Baixar livros de Literatura Infantil
Baixar livros de Matemática
Baixar livros de Medicina
Baixar livros de Medicina Veterinária
Baixar livros de Meio Ambiente
Baixar livros de Meteorologia
Baixar Monografias e TCC
Baixar livros Multidisciplinar
Baixar livros de Música
Baixar livros de Psicologia
Baixar livros de Química
Baixar livros de Saúde Coletiva
Baixar livros de Serviço Social
Baixar livros de Sociologia
Baixar livros de Teologia
Baixar livros de Trabalho
Baixar livros de Turismo
Download