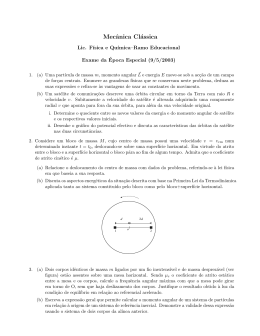
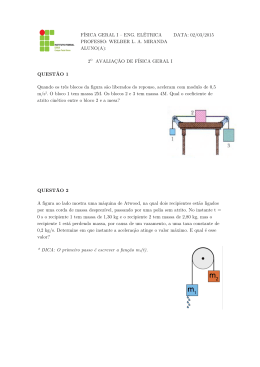
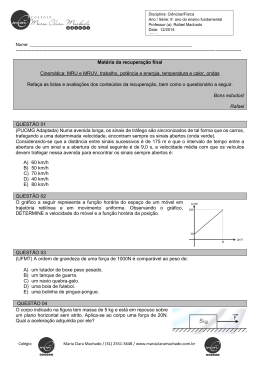
7.3 Flexão de uma barra Estuda-se a deformação por flexão recorrendo ao método das secções. Este método assume que, se uma estrutura está em equilı́brio, também as partes deverão estar, e permite determinar a distribuição das tensões e momentos internos. É a partir destas grandezas que é possı́vel determinar as tensões criticas do material, nomeadamente as tensões normais e tangenciais máximas. 7.3.1 Método das secções Consideremos uma barra apoiada nas extremidades e sujeita a uma carga no ponto médio. Queremos determinar a distribuição interna de forças e momentos de forças. Começamos por determinar as forças e momentos externos aplicados na barra impondo F F F1 000000000000000000000000000000000000 111111111111111111111111111111111111 111111111111111111111111111111111111 000000000000000000000000000000000000 000000000000000000000000000000000000 111111111111111111111111111111111111 000000000000000000000000000000000000 111111111111111111111111111111111111 000000000000000000000000000000000000 111111111111111111111111111111111111 111111111111111111111111111111111111 000000000000000000000000000000000000 000000000000000000000000000000000000 111111111111111111111111111111111111 000000000000000000000000000000000000 111111111111111111111111111111111111 000000000000000000000000000000000000 111111111111111111111111111111111111 000000000000000000000000000000000000 111111111111111111111111111111111111 b) 2 1 F2 a) Figura 7.4: Barra apoiada nas extremidades sujeita a uma carga F no ponto médio as condições de equilı́brio à barra como um todo. Da Fig. 7.7b) temos: a) equilı́brio de forças: F1 + F2 = F b) equilı́brio de momento relativamente ao ponto 1: −F L/2 + F2 L = 0 ø F2 = F/2. Substituindo este resultado em a) temos F1 = F2 = F/2. Conhecidas as forças e momentos (neste caso nulos) externos calculamos as forças internas F (x) e momentos internos M(x) pelo método das secções. Consideramos um F F1 F2 F(x), M(x) x 2 1 Figura 7.5: Secção de uma barra apoiada nas extremidades sujeita a uma carga F no ponto médio elemento da barra de comprimento x. Se a barra está em equilı́brio, o segmento x da barra também está em equilı́brio e, por isso, calculamos as forças internas F (x) e momentos internos M(x) que o resto da barra exerce sobre a secção considerada da equação de equilı́brio de forças e equilı́brio de momentos. Para x < L/2 temos F F + F (x) = 0 → F (x) = − 2 2 87 xF (x) + M(x) = 0 → M(x) = x F 2 (7.15) Para x > L/2 obtemos F F − F + F (x) = 0 → F (x) = 2 2 L F − F + xF (x) + M(x) = 0 → M(x) = (L − x) . (7.16) 2 2 Na Fig. 7.6 representamos em função de x a distribuição das forças internas e momentos internos ao longo da barra. O momento M(x) é o mento flector responsável pela ligeira flexão da barra que obriga o material da metade de cima da barra a estar sujeito a forças de compressão e o da metade de baixo da barra a estar sob forças de tracção F(x) F/2 L/2 L x L/2 L x −F/2 M(x) FL/2 b) a) Figura 7.6: Barra apoiada nas extremidades sujeita a uma carga F no ponto médio: a)distribuição interna de forças e momentos; b) distribuição de forças que dá origem ao momento flector M(x): Consideremos agora a situação de uma barra apoiada nas extremidades e sujeita apenas à força da gravidade. Neste caso, para determinarmos o valor das forças externas que actuam na barra consideramos além das forças de reação nos extremos o peso aplicado no centro da barra. Do equilı́brio de forças e momentos temos a) equilı́brio de forças: F1 + F2 = P b) equilı́brio de momento relativamente ao ponto 1: −P L/2 + F2L = 0 ø F2 = P/2. Substituindo este resultado em a) temos F1 = F2 = P/2. Consideramos agora uma 88 F1 F2 F(x), M(x) 1 P(x) x 2 Figura 7.7: Secção de uma barra apoiada nas extremidades sujeita à força da gravidade secção de comprimento x tal como indicado na figura ??: neste elemento da barra actua a força F1 o peso do segmento P (x) = xP/L e F (x) e M(x) em x. Das condições de equilı́brio de forças e momentos obtemos P xP P − P (x) + F (x) = 0 → F (x) = − + 2 2 L xP (x) xP x x2 P 1 x xF (x)+M(x)− = 1− . (7.17) = 0 → M(x) = −xP − + 2 2L 2 L 2 L Neste caso esta expressão é válida para todos os elementos de x, 0 < x < L. Representando F (x) e M(x) num gráfico obtemos: F(x) F/2 L/2 L x L/2 L x −F/2 M(x) FL/8 a) Figura 7.8: Barra apoiada nas extremidades sujeita à força da gravidade: distribuição interna de forças e momentos 89 7.3.2 Momento flector e curvatura da trave Como poderemos determinar deformação da trave? A equação que determina a forma da trave sob a acção de forças externas depende, em primeira aproximação, da distribuição de momentos internos da barra. Definimos o plano neutro como sendo o local geométrico dos pontos da barra que estão sujeitos a uma tensão nula e por isso não sofrem deformação. Se a barra for simétrica o plano neutro corta a barra em duas partes iguais. Seja R o raio de curvatura da barra. Da Fig 7.9 temos Ο O α y ∆θ R R α/2 α/2 ∆s O’ C’ O C θ θ+∆θ z x b) a) Figura 7.9: Flexão de uma barra CC = OO ′ + 2 αx . 2 Definindo OO ′ = L e CCL + δL, obtemos αx Lx αx δL = = = = ǫ, L L RL R onde ǫ é a deformação sofrida pela barra, o ângulo α foi substituı́do por L/R e considerámos que α é suficientemente pequeno talque tgα ∼ α. Obtivemos a deformação em termos do raio de curvatura R e da distância ao plano neutro x, ǫ = x/R. Esta expressão é válida para pequenas deformações e é independente da forma da secção da trave. A Fig. 7.9b) permite relacionar a forma que a trave adquire y(z) com a curvatura 1/R. No ponto P a tangente à curva, que faz um ângulo θ com a horizontal, é dada por dy tgθ = (z) ∼ θ. dz ′ No ponto P temos dy (z + ∆z) ∼ θ + ∆θ. tg(θ + ∆θ) = dz 90 Finalmente podemos escrever para a curvatura 1/R ∆θ 1 = lim = lim R ∆s→0 ∆s ∆s→0 dy (z dz + ∆z) − ∆s dy (z) dz = d2 y dz 2 . O momento flector total em cada secção da trave necessário para a barra ficar em equilı́brio estático calcula-se somando a contribuição de cada elemento de superfı́cie dS da secção da trave dM = xσ dS visto que a força exercida em dS é dF = σ dS. Substituindo σ = Ex/R e considerando uma secção rectangular de largura a e altura b temos b/2 Ex2 Ea b3 adx = . R 12 −b/2 R R Introduzindo o momento de inércia areolar IA = x2 dS, que neste caso é igual a IA = ab3 /12 obtemos para o momento flector total M= Z M= EIA . R Concluı́mos que o grau de deflexão definido pela curvatura da trave 1/R, é dado por M 1 = , R EIA e a curvatura será tanto maior quanto maior o momento flector M e menor o momento de inércia areolar IA e o módulo de Young do material de que é feita a barra E. Em termos do momento flector a tensão normal à secção σ, função da distância ao plano neutro x é dada por Mx . σ= IA É interessante calcular o momento de inércia areolar de uma trave com secção rectangular quando a barra é colocada em duas posições diferentes, conforme indicado na Fig. 7.10b). No caso I ab3 IA,I = , 12 na situação II ba3 IA,II = . 12 Considerando b = 2a vemos que IA,I = 22 IA,II . O momento de inércia areolar de uma trave com secção circular é, usando coordenadas polares (x = r sin θ) é IA = Z 2 x dS = Z R 0 Z 2π R4 r sin (θ) rdr dθ = π. 4 2 0 91 2 a b/2 dx a x a b b −b/2 b) a) Figura 7.10: Momento de inércia areolar: a) secção rectangular; b) barra deitada ou em pé Se for ôca IA = Z 2 x dS = Z Re Ri Z 2π r 2 sin2 (θ) rdr dθ = 0 Re4 − Ri4 π. 4 Obtemos a forma da trave integrando a equação diferencial de segunda ordem d2 y 1 M(z) , = = 2 dz R EIA (7.18) onde M(z) é o momento interno no ponto z da trave. Calculemos a forma da trave apoiada nas extremidades e apenas sujeita à força da gravidade. Neste caso vimos que (??) M(z) = zP z 1− . 2 L Substituindo esta última expressão em (??) obtemos a equação d2 y z2 P z− , = dz 2 2EIA L (7.19) que terá de ser integrada com as condições fronteira y(0) = y(L) = 0, i.e. o deslocamento nas extremidade é nulo. Da primeira integração obtemos 2 dy P z z3 , = − dz 2EIA 2 3L + C e integrando mais uma vez temos P y= 2EIA z3 z4 ′ − + Cz + C , 6 12L 92 onde C e C ′ são constantes de integração que deverão ser fixas impondo as condições 2 fronteira. De y(0) = 0 temos C ′ = 0 e de y(L) = 0 obtemos C = − L12 . A função deflexão de uma trave apoiada nas extremidades e apenas sujeita à força da gravidade é assim dada por 3 z z4 L2 z P , − +− y= 2EIA 6 12L 12 sendo o ponto que sofre o maior deslocamento o ponto médio da trave. As condições de fronteira que são impostas dependem do problema em estudo. Consideremos alguns casos • Trave fixa numa extremidade com um grampo sujeita à acção da força da gravidade ou a uma força aplicada na extremidade livre. Neste caso o deslocamento da extremidade fixa é nulo y(0) = 0 o mesmo não sucedendo com a extremidade livre. A segunda condição a impor tem a ver com a forma da trave na ponta fixa: devido à existência do grampo não só a trave não se desloca nesse ponto como também a forma que a trave adquire é tal que em z = 0 se mantém horizontal, dy = 0. dz z=0 • Trave apoiada nas duas extremidades sujeita a uma força perpendicular à trave aplicada a meio. Neste caso obtemos duas expressões para a distribuição de momentos internos: uma válida para z < L/2, (??), e outra válida para z > L/2, (??), e a equação (??) terá de ser resolvida para cada uma. No final haverá quatro constantes de integração, duas por cada equação integrada. Neste caso teremos de impor que o deslocamento das extremidades é nulo y(0) = y(L) = 0 dy dy − + e que a trave é contı́nua, y(L/2 ) = y(L/2 ) e dz z=L/2− = dz z=L/2+ . Como na presente situação sabemos que o ponto médio da trave é o ponto que sofre o maior desvio da horizontal e que portanto neste ponto a derivada da função deflexão é nula podemos substituir as duas últimas condições por dy dy = = 0. dz z=L/2− dz z=L/2+ 93 7.4 Problemas bidimensionais Consideremos uma barra sujeita a uma distribuição bidimensional de tensões. Das Condições de equilı́brio local temos: 2 X ∂σij i=1 ∂xi + ρ Fj = 0, ou ainda, escrevendo explicitamente ambas as equações ∂σ11 ∂σ21 + + ρ F1 = 0, ∂x1 ∂x2 (7.20) ∂σ12 ∂σ22 + + ρ F2 = 0. (7.21) ∂x1 ∂x2 Numa deformação bidimensional além ds condições de equlı́brio também as condições de compatibilidade deverão ser satisfeitas: ∂ 2ǫ12 ∂ 2 ǫ11 ∂ 2 ǫ22 + =2 . 2 2 ∂x2 ∂x1 ∂x1 ∂x2 (7.22) Substituindo as equações constitutivas para deformações lineares elásticas ǫ11 = 1 (σ11 − νσ22 ) , E ǫ12 = ǫ22 = 1 (σ22 − νσ11 ) , E σ12 1+ν = σ12 , 2G E em (7.17), obtemos ∂2 ∂2 ∂ 2 σ12 . (σ − νσ ) + (σ − νσ ) = 2(1 + ν) 11 22 22 11 ∂x22 ∂x21 ∂x1 ∂x2 (7.23) Supondo ρ F1 = 0 e ρF2 = ρ g e somando a segunda derivada da equação (7.15) em ordem a x1 com a a segunda derivada da equação (7.16) em ordem a x2 , obtemos ∂ 2 σ11 ∂ 2 σ22 ∂ 2 σ12 . + = −2 ∂x21 ∂x22 ∂x1 ∂x2 (7.24) Substituindo a última equação em (7.18) ∂ 2 σ11 ∂ 2 σ22 ∂ 2 σ22 ∂ 2 σ11 ∂ 2 σ11 ∂ 2 σ22 − ν + − ν + (1 + ν) + (1 + ν) = 0, ∂x22 ∂x22 ∂x21 ∂x21 ∂x21 ∂x22 ou ainda ∂2 ∂2 + ∂x21 ∂x22 (σ11 + σ22 ) = 0. 94 (7.25) As equações (7.15,7.16,7.20) são satisfeitas se σ11 = ∂2φ −ρgy ∂x22 (7.26) σ22 = ∂2φ −ρgy ∂x21 (7.27) ∂2φ , ∂x1 ∂x2 onde a função φ, também conhecida por função tensão, satisfaz a equação (7.28) σ12 = ∂4φ ∂4φ ∂4φ + + 2 = 0. ∂x41 ∂x42 ∂x21 ∂x22 A viga fixa numa extremidade e com uma carga aplicada na extremidade oposta é descrita pela função tensão d φ = x1 x22 − b x1 x2 , 6 onde b, d são constantes a determinar pelas condições de fronteira. Das eqs. (??) e y F ∆ z=a 11111 c 00000 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000 11111 00000−c 11111 c x −c Figura 7.11: Barra carregada com uma extremidade fixa. A secção transversal da barra tem dimensões 2c × a. supondo que o campo gravitacional é desprezável obtemos σ11 = σ22 = ∂2φ = 0, ∂x21 ∂2φ = d x1 x2 ∂x22 σ12 = ∂2φ d = x22 − b. ∂x1 ∂x2 2 Sobre as superfı́cies y = ±c não há forças tangenciais aplicadas logo σ12 (±c) = 0 = d 2 c − b, b = d2 c2 , de onde obtemos 2 d σ12 = (x22 − c2 ). 2 95 A constante d obtém-se impondo que a força total exercida sobre uma secção da barra tenho o valor da força interna obtida pelo método das secções, F~i nt = F ê2 . A superfı́cie elementar dS à distância x2 do plano neutro e com espessura dx2 é a dx2 porque considerámos a espessura da barra ∆z = a. Assim c Z c Z c d 2 d x32 2 2 2 F = σ12 dS = a (x2 − c ) dx2 = a − c x2 = − adc3 . 2 3 3 −c −c 2 −c Desta última expressão obtemos d=− 3F F =− , 3 2c a IA onde IA = 2c3 a/3 é o momento de inércia areolar da barra. Substituindo os valores de b e d nas expressões de σ11 e σ12 obtemos σ11 = − F x1 x2 , IA σ22 = 0 F (x2 − c2 ). 2IA 2 Vemos que a tensão normal à secção transversa da barra é máxima sobre as superfı́cies exteriores x2 = ±c e é nula no plano neutro. As forças tangenciais são máximas max precisamente sobre o plano neutro, σ12 = − 2IFA c22 e nulas nas superfı́cies exteriores. σ12 = − y y c 0 c 0 x σ 12 −c −c b) a) Figura 7.12: Tensões internas sobre uma secção transversal de uma barra carregada: a) tensões normais que dão origem ao momento flector; b) tensões tangenciais nulas sobre a superfı́cie exterior e máxima sobre o plano neutro. 96 7.5 Tensão num tubo cilı́ndrico longo Considere um tubo longo com raios interno e externo respectivamente R1 e R2 . O tubo está cheio de um fluido que exerce uma pressão P. Calcular o tensor das tensões exercidas sobre o tubo em função de R1 e R2 e das constantes de Lamé µ e λ desprezando as forças de volume. Considere que sobre as paredes exteriores do tubo a pressão é nula e os efeitos de anisotropia nos extremos do tubo podem ser desprezados. 7.5.1 O vector deslocamento s Por simetria s deve ter a direcção radial (consideramos um tubo muito longo e desprezamos os efeitos nos extremos). Além dissso s é só função da distância do ponto ao eixo de simetria do tubo (também por simetria). Podemos, então, escrever que r s = f (r)r̂ = f (r) , r (7.29) onde f (r) é apenas função da distância ao eixo. Da equação de equilı́brio local temos (2µ + λ)∇(∇ · s) = 0 (7.30) ou ainda, usando os operadores divergência e gradiente em coordenadas cilı́ndricas ∂ 1 ∂ (rf ) = 0 (7.31) ∂r r ∂r ∂ (rf ) = C ′′ r ∂r C ′′ r 2 rf = + C′ 2 C ′′ r C ′ C′ f= + = Cr + . 2 r r 97 (7.32) (7.33) (7.34) 7.5.2 Condições fronteira As constantes de integração obtêm-se das condições fronteira, nomeadamente em r = R1 −P n̂ = tn̂ (7.35) e em r = R2 0 = tn̂, (7.36) onde t representa o tensor das deformações. Em r = R1 , podemos considerar o ponto A(R1 , 0, z) cujo normal exterior n̂ é o vector n̂ = −ê1 . Sobre a superfı́cie exterior, r = R2 , vamos aplicar a condição fronteira no ponto B(R2 , 0, z) sendo neste caso a normal exterior o vector n̂ = ê1 . De (7.30) temos em r = R1 σ11 = −P, σ21 = σ31 = 0, (7.37) σ11 = σ21 = σ31 = 0. (7.38) e de (7.31) temos para r = R2 Para aplicar as condições fronteira e determinar as constantes de integração temos de calcular o tensor das tensões, σij . 7.5.3 Tensor das deformações O tensor das deformações é dado por 1 ǫij = 2 ∂si ∂sj + ∂xj ∂xi (7.39) donde ′ 2 C + Cr2 − 2x C′ −2 xy C′ 0 r4 r4 2 ′ ǫ= −2 xy C′ C + Cr2 − 2y C′ 0 r4 r4 0 0 0 7.5.4 (7.40) Tensor das tensões O tensor das tensões é dado por σij = 2µ ǫij + λ tr ǫ δij , ou, com tr ǫ = 2C + t= 2Cλ + 2µ C + x2 + y 2 ′ 2C ′ − 2 C = 2C, r2 r4 2 C′ − 2x C′ r2 r4 −4µ xy C′ r4 0 (7.41) (7.42) −4µ xy C′ r4 2Cλ + 2µ(C + 0 98 C′ r2 0 − 2y 2 ′ C) r4 0 . (7.43) 2Cλ No ponto A temos automaticamente σ21 = σ31 = 0, eq (7.32), restando σ11 = −P ou, ainda, C′ 2C(λ + µ) − 2µ 2 = −P. (7.44) R1 No ponto B temos igualmente σ21 = σ31 = 0. A condição σ11 = 0 impõe 2C(λ + µ) − 2µ C′ = 0. R22 (7.45) Resolvendo as últimas duas equações em ordem a C e C ′ obtemos C= −PR12 2(λ + µ) (R12 − R22 ) (7.46) −PR12 R22 . 2µ(R12 − R22 ) (7.47) e C′ = λ Substituindo C e C ′ em (7.29) e (7.24) e sabendo que 2(λ+µ) = ν, temos νPR12 r R22 s= r̂. + (R22 − R12 ) λ 2µν r (7.48) É de salientar que o elemento σ33 não é nulo, σ33 = 2νPR12 . R22 − R12 (7.49) Quanto menor for a espessura do tubo, R2 − R1 , para uma dada pressão interior P, tanto maior é σ33 . Apesar das forças sobre a superfı́cie interior do tubo serem radiais, desenvolvem-se forças internas tangenciais tanto maiores quanto menor ∆R = R2 − R1 . Como geralmente um material suporta forças tangenciais de intensidade bastante inferior às que suportaria se a força fosse de extensão ou compressão, são as forças tangenciais que determinam as caracterı́sticas a que o tubo deve obedecer nas condições dadas. 7.6 Materiais monotrópicos e ortotrópicos Até aqui estudámos materiais isotrópicos que se comportam de igual maneira em todas as direcções. Há, no entanto, materiais com propriedades diferentes num direcção relativamente às duas direcções perpendiculares, estas sim equivalentes. Um exemplo são as madeiras prensadas formadas por folhas finas de madeira cujas fibras são colocadas em direcções perpendidculares em camadas alternadas. Também o osso humano é monotrópico tendo propriedades longitudinais (na direcção da medula) diferentes das transversais. Como exemplo faremos referência às propriedades do tecido ósseo cortical do fémur. Se as propriedades do material forem diferentes em todas as direcções do espaço, mesmo no seu sistema próprio, dizemos que o material é ortotrópico. Voltando ao exemplo da madeira prensada, obtemos um material ortotrópico se considerarmos camadas sucessivas de madeira sobrepostas com as fibras rodadas umas relativamente às outras de um ângulo menor de 90o . Ver figura. 99 b) a) Figura 7.13: Material a) monotrópico, b) ortotrópico 7.6.1 Material monotrópico Num material monotrópico uma das direcções do material tem propriedades diferentes das outras duas. Escolhendo essa direcção como uma das direcções do referencial é possı́vel escrever a equação constitutiva de uma material no regime elástico de um modo semelhante às equações constitutivas de uma material isoptrópico. Supondo o eixo Ox a direcção de montropia e o plano transverso yz um plano de isotropia podemos escrever a lei constitutiva na forma ǫ11 = 1 (σ11 − νl (σ22 + σ33 )) , El (7.50) 1 (σ22 − νt σ33 − ν21 σ11 )) , (7.51) Et 1 (σ33 − νt σ22 − ν31 σ11 )) , (7.52) ǫ33 = Et σ13 σ23 σ12 , ǫ13 = , ǫ23 = . (7.53) ǫ12 = 2Gt 2Gt 2G23 Na verdade o número de constantes independente é cinco porque, segundo o teorema de maxwell uma tensão aplicada na direcção x (longitudinal) dá origem a uma deformação na direcção y (transversal) igual á que a mesma tensão na direcção y provoca na direcção x. Logo ν31 ν21 νl = = , Et Et El Et ν31 = ν21 = νl . El As constantes independentes são ǫ22 = El , Et , νl , νt , Gt , visto que Et . 2(1 + νt ) Um exemplo de um material biológico monotrópico é o osso. Na tabela seguinte são indicadas algumas propriedades do osso cortical do fémur, um material ósseo compacto, G23 = 100 Tabela 7.1: Tensões de cedência, módulos elásticos e de rigidez para o osso cortical do fémur tipo de carga LONGITUDINAL tracção compressão tangencial TRANSVERSAL tracção compressão módulo MÓDULO DE ELASTICIDADE, E longitudinal transversal MÓDULO DE RIGIDEZ, G tensão de cedência 133 MPa 193 MPa 68MPa 51 MPa 133 MPa 17.0 GPa 11.5 GPa 3.3GPa quando sujeito a diversos tipos de forças aplicadas tanto longitudinalmente, i.e. ao longo da direcção do eixo do osso, como transversalmente perpendicularmente ao eixo do osso. Verifica-se que o osso é muito mais resistente a forças longitudinais do que a forças transversais e a forças de compressão do que a forças de tracção. 7.6.2 Materiais ortotrópicos Neste caso as constantes de elasticidade são nove e as equações contitutivas têm a forma σ13 σ23 (1 + νt )σ23 σ12 , ǫ13 = , ǫ23 = = . ǫ12 = 2Gt 2Gt 2G23 Et 1 − νE121 − νE131 σ11 ǫ11 E1 1 ǫ22 = − ν12 − νE232 σ22 E1 E2 1 σ33 ǫ33 − νE131 − νE233 E3 ν13 ν21 ν12 ν32 ν23 ν31 =− − =− , − =− − E3 E1 E2 E1 E3 E2 σ12 σ13 σ23 ǫ12 = , ǫ13 = , ǫ23 = . 2G12 2G13 2G23 101 Capı́tulo 8 Mecânica de fluidos. Fluidos perfeitos A designação de fluidos abrange todos os lı́quidos e gases. Estes têm algumas propriedades distintas excepto em regiões crı́ticas. Assim um lı́quido ocupa um volume definido e apresenta uma superfı́cie livre. Ao contrário um gás ocupa sempre completamente o recipiente onde é introduzido e não têm superfı́cie livre. Daqui resulta que um lı́quido tem uma densidade definida a uma dada temperatura, o que não acontece com um gás. Estes efeitos têm a sua origem na estrutura microscópica. Nos lı́quidos as moléculas estão ligadas por forças intermoleculares enquanto que num gás as moléculas estão praticamente livres. Assim é evidente que um lı́quido é fracamente compressı́vel o que não acontece com os gases. Esta propriedade permite uma importante divisão no estudo dos fluidos, isto é, fluidos incompressı́veis e compressı́veis. O estudo dos fluidos pode ainda ser subdividido: fluidos em equilı́brio e em movimento. Para um fluido em repouso a interacção entre dois elementos contı́guos do fluido é normal à superfı́cie comum, pois se isto não se verificasse, isto é, se existisse uma componente tangencial as moléculas deslizariam o que contrariava a hipótese de equilı́brio. Todavia essa componente tangencial pode existir em fluidos em movimento. Assim um fluido em movimento pode exibir essa componente sobre a superfı́cie com a qual está em contacto; um tal fluido diz-se viscoso. Um fluido não viscoso ou perfeito pode ser definido como um meio contı́nuo que não exibe reacção tangencial com qualquer superfı́cie com a qual está em contacto. Todos os fluidos possuem um certo grau de viscosidade mas, em alguns casos, ela é pequena e pode ser desprezada, considerando o fluido como não viscoso. Problemas ligados a fluidos perfeitos são de mais fácil estudo que os outros. Estudaremos aqui alguns aspectos ligados a fluidos ideais com algum pormenor, terminando o curso com uma breve referência a fluidos viscosos. Antes de passar ao estudo de fluidos ideais vamos referir que também em mecânica de fluidos os fenómenos estudados têm um caracter macroscópico sendo o fluido olhado como um meio contı́nuo e homogéneo, isto é, não existem lacunas nele. Isto significa que cada pequeno elemento de volume é tal que contém um elevado número de moléculas. Assim qualquer elemento de volume infinitesimal é um elemento pequeno em relação ao corpo mas grande em relação às distâncias entre as moléculas. É também neste 102 sentido que entendemos partı́cula do fluido e ponto do fluido. Assim quando se fala de deslocamento duma partı́cula do fluido, tem-se em vista não o deslocamento duma molécula isolada, mas o de um elemento de volume contendo um grande número de moléculas. 8.1 A Hidrostática A hidrostática estuda os fluidos em repouso. dS n̂ df Vamos começar por considerar o problema das tensões que se exercem num meio contı́nuo. A força df exercida pelas moléculas será proporcional à extensão da superfı́cie dS e perpendicular à superfı́cie. Teremos df = −p n̂ dS, (8.1) onde df é a resultante das forças que as moléculas do lado de fora, para o qual aponta o vector n̂, normal à superfı́cie, exercem sobre as moléculas do lado oposto, e p uma constante de proporcionalidade que designaremos por pressão. Esta equação é aplicável a fluidos em repouso ou a fluidos ideais em movimento, nos quais não existem forças tangenciais. Da maneira como definimos a pressão somos levados a concluir que ela pode variar de ponto para ponto, e como se pode considerar uma infinidade de orientações da superfı́cie, em torno do ponto P , a grandeza fı́sica p dependeria ainda dessa orientação que podemos caracterizar pelo vector n̂. Isto é, p = p(P, n̂). (8.2) Verifica-se, no entanto, que p não depende de n̂. Assim, num dado ponto do fluido em equilı́brio, a pressão tem o mesmo valor em todas as direcções, sendo, por isso, uma quantidade escalar. De facto, dado que df = t(n̂)dS, (8.3) comparando esta equação com a eq. (8.1) vem t(n̂) = −p(n̂)n̂. 103 (8.4) Como a tensão é função linear das componentes da normal n̂, p(n̂) terá os mesmos valores para todos os n̂. Assim, t(n̂) = − p n̂, (8.5) onde p pode, como já vimos, variar de ponto para ponto. Multiplicando esta equação escalarmente por êi t(n̂) · êi = −pn̂ · êi e comparando com (4.10) obtemos X σij nj = −p ni ⇒ σij = −p δij . (8.6) j Assim para um fluido em equilı́brio −p 0 0 σ = 0 −p 0 . 0 0 −p (8.7) Como já vimos a condição de equilı́brio pode escrever-se na forma X ∂σij j ∂xj + ρgi = 0, (8.8) ou seja − X ∂ (pδij ) + ρgi = 0 ∂xj j X ∂p − δij + ρgi = 0 ∂xj j − ∂p + ρgi = 0. ∂xi (8.9) Vectorialmente a equação anterior pode ser escrita como −∇p + ρg = 0, (8.10) ∇p = ρg. (8.11) Esta equação descreve o equilı́brio mecânico do fluido. Na ausência de forças exteriores, a equação de equilı́brio reduz-se a ∇p = 0, quer dizer p = cte, a pressão é a mesma em todos os pontos do fluido. Suponhamos que um fluido não se encontra somente em equilı́brio mecânico, mas também em equilı́brio térmico. Usando a relação da termodinâmica dφ = −sdT + V dp, 104 (8.12) sendo φ o potencial termodinâmico referido à unidade de massa do fluido e s a entropia por unidade de massa. A temperatura constante 1 dφ = V dp = dp. ρ (8.13) Da identidade dφ = ∇φ · dr e dp = ∇p · dr, temos ∇φ = ∇p . ρ Assim a equação (8.11) toma a forma ∇p = ∇φ = g. ρ (8.14) g = −∇(gz), (8.15) ∇(φ + gz) = 0. (8.16) φ + g z = cte, (8.17) Substituindo na última equação, temos Concluı́mos então que sendo g z a energia potencial da unidade de massa do fluido no campo da força gravı́tica. Esta condição é conhecida em fı́sica estatı́stica como condição de equilı́brio termodinâmico dum sistema colocado num campo externo. 8.2 8.2.1 Fluidos incompressı́veis Pressão em diferentes pontos de um fluido A equação (8.11) é fácil de integrar se a densidade do fluido puder ser considerada como constante em todo o seu volume, quer dizer, se não há compressão significativa do fluido sob o efeito do campo exterior. Dirigindo o eixo dos z (referencial de inércia) verticalmente para cima tem-se ∂p ∂p = = 0, ∂x ∂y ∂p = −ρg. ∂z (8.18) Donde p = −ρ g z + cte. (8.19) Se o fluido em repouso, tem a superfı́cie livre à altura h, na qual existe uma pressão exterior p0 , a mesma para todos os pontos, esta superfı́cie deve ser um plano horizontal z = h. Da condição p = p0 para z = h deduz-se p0 = −ρgh + cte donde cte = p0 + ρgh 105 (8.20) de tal modo que p = p0 + ρ g (h − z). (8.21) Situações bem conhecidas como, por exemplo, o ”princı́pio”dos vasos comunicantes onde a pressão é a mesma em todos os pontos situados à mesma profundidade em todos os ramos que comunicam entre si, ou o princı́pio de Arquimedes cujo enunciado é: um corpo total ou parcialmente imerso num fluido fica sujeito, da parte deste, a uma força vertical (força de impulsão), dirigida de baixo para cima, igual ao peso do volume de lı́quido deslocado, facilmente se compreendem à luz da eq. (8.21). 8.2.2 Superfı́cie livre de um lı́quido incompressı́vel em rotação Vamos considerar nesta secção um lı́quido incompressı́vel contido num recipiente que roda com velocidade angular ω, em torno do seu eixo, como mostra a figura. O lı́quido roda juntamente com o recipiente, mantendo-se, relativamente a ele, em equilı́brio. A análise desta situação fı́sica e, em particular, o estudo da forma da superfı́cie livre do lı́quido podem ser feitos a partir da condição de equilı́brio em relação a um referencial acelerado (não inercial), neste caso o próprio recipiente. Nesta situação, a condição de equilı́brio (8.10) deve incluir as forças inerciais para além das forças newtonianas já consideradas e que são a força gravitacional e as forças superficiais (de pressão). A expressão geral das forças inerciais é da forma F∗ = −m a, em que m é a massa do objecto cujo movimento está a ser analisado e a é a aceleração do referencial. Neste caso concreto, a = −ω 2 rr̂ e a força inercial F∗ = mω 2 rr̂ tem a designação de força centrı́fuga apontando para fora do eixo. Atendendo a que as dimensões das parcelas que entram na condição de equilı́brio são de forças por unidade de volume, a condição de equilı́brio relativo a um referencial de inércia toma a forma êz êr B z0 ω 106 −∇p + ρ g + ρ ω 2 rr̂ = 0. (8.22) A condição de equilı́brio pode também ser reescrita em função de potenciais como já foi feito ao escrever (8.16), tendo em conta que d ωˆ2 r 2 d r=∇ g = g z k̂, e ω 2 r r̂ = dz dr 2 permitindo obter ∇( ω 2 r2 2 , p 1 + g z − ρ r 2 ω 2 ) = 0, ρ 2 (8.23) que implica 1 2 2 ρ r ω ) = constante. (8.24) 2 Os valores das diferentes grandezas fı́sicas definidas para o ponto B (ver figura) sobre a superfı́cie livre permitem determinar a constante do segundo membro da equação anterior, conduzindo a p + ρ(gz − p − p0 = ρ g (z0 − z + r 2 ω 2 /2g). (8.25) Para a superfı́cie livre, p = p0 , reduzindo-se esta equação a z − z0 = r 2 ω 2 /2g, (8.26) que representa um paraboloide de revolução. Estas equações mostram que a forma da superfı́cie livre depende da velocidade angular ω e que todos os pontos a igual profundidade relativamente à superfı́cie livre se encontram à mesma pressão. 8.3 8.3.1 Fluidos compressı́veis Superfı́cie livre de um lı́quido compressı́vel em rotação Para grandes massas de fluido a densidade ρ não será, em geral, constante. Isto acontece principalmente com os gases como já referimos, em que a densidade varia com a pressão. Para um gás ideal a relação entre estas grandezas fı́sicas constitui a equação de estado p V = n R T, (8.27) ou p = ρ R T /M com ρ = n M/V, (8.28) onde R é uma constante universal dos gás, n é o número de moles e M é a massa molar.. A temperatura constante (estado isotérmico) a eq. (8.28) pode ser escrita na forma p = c ρ, onde c é uma constante. Assim, o potencial termodinâmico toma a forma (ver eq. (8.13)) 107 RT φ = M Z dp , p (8.29) ou seja, RT lnp. (8.30) M Considerando um problema análogo ao tratado na secção anterior, e admitindo que a temperatura T é constante, obtemos, usando a condição de equilı́brio, φ = ln p + M 1 ( g z − r 2 ω 2 ) = constante. RT 2 A B (8.31) C z z=0 r ω Uma vez que para z = 0 e r = 0 a pressão é p = p0 , a constante de integração da equação anterior é ln p0 , permitindo escrever M 1 ( − g z + r 2 ω 2)]. (8.32) RT 2 Assim as superfı́cies a pressão constante são paraboloides, sendo estes definidos, por exemplo, por 1 (8.33) − g z + r 2 ω 2 = 0, 2 para o caso em que p = p0 Os paraboloides com p < p0 , p = p0 e p > p0 estão, respectivamente, acima (curva A) e abaixo (curva C) do paraboloide de referência (8.33) (curva B) como se mostra na figura. Vamos apresentar de seguida algumas aplicações da eq. (8.32). p = p0 exp [ 108 (i) Princı́pio da centrifugação: Desprezando o efeito da gravidade (g = 0), a eq. (8.32) reduz-se a p = p0 exp [( M ) r 2 ω 2 ], 2RT (8.34) mostrando que para r = 0 temos p = p0 . Por outro lado, para valores definidos de r e ω, a pressão depende da massa molecular M. Isto significa se tivermos uma mistura de dois fluidos compressı́veis com massas moleculares M1 e M2 diferentes, podemos obter, a partir da eq. (8.34), pressões parciais da forma Mi ) r 2 ω 2 ], i = 1, 2 (8.35) 2RT onde p01 e p02 são as pressões parciais dos gases para r = 0. A pressão total é obtida através da soma, p = p1 + p2 . Da equação anterior conclui-se que, à medida que r aumenta, a pressão sobre o componente de maior massa aumenta mais que a pressão sobre o componente de menor massa. Este facto traduz-se numa concentração do componente de maior massa junto das bordas enquanto o componente de menor massa se situa próximo do eixo — princı́pio da centrifugação. Esta descoberta tem sido largamente desenvolvida e aplicada, por exemplo, na separação da nata do leite, na separação parcial dos gases na atmosfera terrestre, na separação dos isótopos do urâneo, etc. As ciências biológicas também beneficiaram consideravelmente do princı́pio da centrifugação. pi = p0i exp [( (ii) Fórmula barométrica para uma atmosfera isotérmica Fazendo ω = 0 na eq. (8.32), ou usando directamente a condição de equilı́brio (8.10), obtém-se p = p0 exp ( − M g z/R T ). (8.36) Esta equação pode ser usada para determinar a altitude de um ponto, z, na atmosfera acima de um determinado nı́vel de referência onde a sua pressão é p0 , a partir da leitura de um barómetro. Considerando, por exemplo, os seguintes valores para a atmosfera M = 29 × 10−3 kg, T = 273 K, g = 9, 8m s−2 , R = 8, 3 JK−1 z = 1000 m obtém-se p/p0 ≈ 0, 88. Para z = 8000m (Monte Evereste) teriamos supondo ainda T=273 K, p/p0 = 0.36. Este cálculo mostra que a uma leitura no barómetro de p/p0 ≈ 0, 88 numa atmosféra isotérmica, corresponde a uma altitude de 1000 m. Para o estado a temperatura constante a eq. (8.36) pode também ser escrita em termos da densidade, 109 ρ = ρ0 exp ( − M g z/R T ), (8.37) onde ρ0 é a densidade para um nı́vel de referência z = 0. escrevendo M g z/R T = m g z/k T = U/k T , onde U é a energia potencial da partı́cula de massa m no campo gravı́tico situado à altura z, a equação anterior conduz a ρ = ρ0 exp (− U/k T ). (8.38) A função exponencial desta equação tem a designação de factor de Boltzmann, constituindo uma quantidade fundamental em fı́sica estatı́stica. 110 Capı́tulo 9 Hidrodinâmica A hidrodinâmica estuda fluidos em movimento. Efeitos irreversı́veis tais como os que são associados à viscosidade e conductividade térmica não são tratados neste ponto. Reservaremos um outro capı́tulo para uma breve referência a fluidos viscosos. A descrição matemática do estado dum fluido em movimento faz-se por meio de funções que determinam a distribuição da velocidade do fluido, v = v(x, y, z, t), e de duas quaisquer das suas grandezas termodinâmicas, por exemplo, a pressão p(x, y, z, t) e a densidade ρ(x, y, z, t). A equação de estado permite determinar todas as grandezas termodinâmicas a partir dos valores de duas delas. São, por isso, necessárias cinco grandezas (três componentes da velocidade v, a pressão p e a densidade ρ) para determinar completamente o estado do fluido em movimento. Todas estas grandezas são funções das coordenadas x, y, z e do tempo t. Assim v(x, y, z, t) é a velocidade do fluido em cada ponto do espaço x, y, z no instante t, quer dizer, referese a pontos determinados no espaço. E o mesmo para p e ρ. Consequentemente a mudança de qualquer destas quantidades durante um certo intervalo de tempo depende não só do intervalo de tempo mas também da posição dentro do fluido. É conveniente, para o que se pretende desenvolver, exprimir esta dependência do tempo e da posição no fluido introduzindo explicitamente o conceito de derivada total. Vamos fazê-lo a seguir através de um exemplo. 9.1 A derivada total Em mecânica de partı́culas a posição r e o tempo são variáveis dependentes, o tempo parametriza r. O mesmo não sucede em meios contı́nuos. Consideremos um elemento de fluido (por exemplo um elemento que tingimos com um pouco de tinta). Podemos seguir a evolução temporal deste elemento. Se no instante t ele ocupa a posição (x, y, z) e tem a velocidade v(x, y, z, t), no instante t + δt ele ocupa a posição x + δx = x + vx δt, y + δy = y + vy δt, z + δz = z + vz δt (9.1) e tem a velocidade v(x + vx δt, y + vy δt, z + vz δt, t + δt). Consideremos a densidade do fluido ρ(x, y, z, t). A variação da densidade δρ durante o 111 intervalo de tempo δt é dada por δρ = δρ(x, y, z, t) = ∂ρ ∂ρ ∂ρ ∂ρ δt + δx + δy + δz, ∂t ∂x ∂y ∂z (9.2) onde (δx, δy, δz) são os correspondentes incrementos das componentes da posição durante δt. Dividindo a equação por δt obtemos δρ ∂ρ ∂ρ δx ∂ρ δy ∂ρ δz = + + + . δt ∂t ∂x δt ∂y δt ∂z δt (9.3) Considerando o limite desta expressão quando δt → 0, e introduzindo neste limite a notação usual de cálculo dx δy dy δz dz δx → , → , → δt dt δt dt δt dt (9.4) que são, respectivamente, as componentes vx , vy e vz , do vector velocidade do fluido v no ponto (x, y, z) e no instante t, podemos escrever dρ ∂ρ ∂ρ ∂ρ ∂ρ = + vx + vy + vz dt ∂t ∂x ∂y ∂z (9.5) em que também se substitui δρ por dρ . δt dt Introduzindo o vector (grad ρ) e o produto escalar (v.grad)ρ, temos finalmente ∂ρ dρ = + (v.grad)ρ, dt ∂t em que grad ρ = ∂ρ ∂ρ ∂ρ î + ĵ + k̂. ∂x ∂y ∂z (9.6) (9.7) O primeiro termo do 2o membro da equação (9.6) é a variação de ρ no tempo numa dada posição (x, y, z) de tal modo que dx, dy, dz são todos nulos. O segundo termo é a variação da densidade do fluido com a posição num dado instante, isto é, dt = 0, dx 6= 0, dy 6= 0, dz 6= 0. Assim a eq. (9.6) traduz a variação total da densidade em torno de um elemento do fluido, quando este se move no espaço com o fluido. É esta a interpretação fı́sica da quantidade dρ que é a chamada derivada total da densidade do dt fluido. A expressão ∂ d = + (v.grad) (9.8) dt ∂t é um operador chamado derivada total. 9.1.1 Notação das componentes A equação (9.8) pode ser expressa em termos das componentes dos vectores. Cada vector tem três componentes independentes, por exemplo a velocidade v tem componentes 112 vx , vy , vz que vamos substituir por v1 , v2 , v3 . Vamos usar esta notação em conjunto com o conceito de derivada total 3 (v.grad) = vx X ∂ ∂ ∂ ∂ vk . + vy + vz = ∂x ∂y ∂z ∂x k k=1 (9.9) Assim, a derivada total na notação das componentes toma a forma 3 X ∂ ∂ d vk , = + dt ∂t k=1 ∂xk (9.10) e a derivada total da densidade é dada por 3 ∂ρ X ∂ρ dρ = + vk . dt ∂t k=1 ∂xk (9.11) A densidade é uma quantidade escalar, isto é, tem amplitude mas não tem propriedades direccionais. No entanto a derivada total dum vector, por ex. a velocidade duma partı́cula do fluido, também está incluida neste esquema. Assim dv ∂v = + (v.grad)v. dt ∂t (9.12) Na notação das componentes temos 3 ∂vi X ∂vi dvi = + vk . dt ∂t ∂xk k=1 (9.13) Esta equação traduz três equações (i = 1, 2, 3). Outro exemplo é o campo das velocidades associado a um meio material sujeito ao deslocamento s(x, y, z, t) que é dado por v(x, y, z, t) = ∂s X ∂s . + vi ∂t ∂x i i 113 (9.14) Capı́tulo 10 Equação de movimento Até agora estudámos situações de equilı́brio. Neste capı́tulo iremos estudar a equação de movimento que descreve a evolução temporal do campo dos deslocamentos após a aplicação de forças externas ao meio material. 10.1 Equação de movimento Seja dm a massa contida num volume dV . O elemento de massa dm encontra-se em movimento sujeito às forças internas e às forças volúmicas. Da 2a Lei de Newton temos que X ∂σji dm ai (x, y, z, t) = ρFi + dV, (10.1) ∂xj ou, visto que dm = ρ dV , onde ρ(x, y, z, t) é a densidade do material, X ∂σji ρ ai = ρ Fi + , ∂xj ou ainda, ρ X ∂σji dvi = ρ Fi + . dt ∂xj (10.2) (10.3) Esta equação representa a equação de movimento para meios elásticos. É uma equação não linear e por isso de solução difı́cil. Em certas condições esta equação pode ser simplificada, nomeadamente no estudo de sólidos no limite de validade da Lei de Hooke. Neste caso o segundo membro da eq. (10.3) pode ser escrito em termos do vector deslocamento s, nomeadamente temos, ρ 10.2 dv = ρ F + (µ + λ)∇(∇ · s) + µ∇2 s. dt (10.4) Equação de Euler A equação (10.3) pode ser aplicada a um fluido se identificarmos as tensões exercidas no fluido. Consideremos primeiro um fluido perfeito sem viscosidade. Este fluido não 114 suporta tensões tangenciais e por isso X ∂σji i,j ∂xj êi = −∇p. onde p é a pressão exercida no ponto de coordenadas (x, y, z). A equação de movimento de um fluido sem viscosidade, conhecida por equação de Euler é dada por ∂~v d~v ~ =ρ + (~v · ∇)~v = ρF~ − ∇p. (10.5) ρ dt ∂t 10.3 Fluido com viscosidade E se o fluido tiver viscosidade, qual é a equação de movimento. Na verdade todos os lı́quidos têm viscosidade o que implica que suportam tensões tangenciais. Dependendo do material essas tensões poderão ser maiores ou menores. Falamos num fluido de Newton se a tensão tangencial for proporcional ao gradiente da velocidade. y V x Num escoamento bidimensional no plano xy temos para a tensão tangencial σ12 = η dv1 , dx2 onde η é o coeficiente de viscosidade que tem no SI as unidades kg s−1 m−1 =Ns/m2 . No sistema CGS a unidade é o poise, 1 poise=0.1Ns/m2 =0.1 Pa. Suponhamos um fluido contido entre duas superfı́cies planas e que um dos plano se desloca a uma velocidade V~ = V êx . Devido à existência de viscosidade as moléculas do fluido aderem à superfı́cie em movimento e são arrastadas. As camadas seguintes são arrastadas pela primeira camada sendo cada vez menor a velocidade das camadas cada vez mais afastadas da superfı́cie em movimento. Há troca de moléculas entre as diferentes camadas o que ~. provoca uma força de arrasto que actua num plano paralelo à direcção da velocidade V A relação entre deformação e tensão num fluido com viscosidade é assim generalizada para σij = −pδij + Πij (10.6) ∂vj ∂vi onde o tensor das tensões de viscosidade para um fluido isotrópico com Vij = 12 ∂x + ∂xi j é Πij = 2ηVij + η ′ trV δij , 115 onde η e η ′ são os primeiro e segundo coeficientes de viscosidade. Para um fluido incompressı́vel trV = divV = 0 e Πij reduz-se a Πij = 2ηVij . O fluido de Stokes é um fluido queP para o qual o valor médio das tensões aplicadas é independente da taxa de dilatação k Vkk = ∇ · ~v. 10.4 Equação de Navier-Stokes Substituindo o tensor das tensões de um fluido de Newton (10.6) na equação de movimento de meios contı́nuos (10.3) obtemos a equação de Navier-Stokes ∂~v d~v + (~v · ∇)~v = ρF~ − ∇p + η∇2~v + (η + η ′ )∇(∇ · ~v ) (10.7) ρ =ρ dt ∂t visto que, 3 X ∂Πij j=1 ∂xj 3 X ∂ (2η Vij + η ′ trV δij ) ∂x j j=1 3 2 3 3 X X X ∂ vi ∂ 2 vk ∂ 2 vj ′ = η δ + η + ij ∂x2j ∂xi ∂xj ∂xj ∂xk j=1 j=1 k=1 = = η(∇2 vi + ∂ ∂ (∇ · v)) + η ′ (∇ · v) ∂xi ∂xi (10.8) A equação de navier-Stokes é uma equação não linear na velocidade que, à excepção de alguns casos simples de escoamento laminar estacionário, tem de ser resolvida numericamente. 116
Download