UNIVERSIDADE DO ALGARVE – ESCOLA SUPERIOR DE TECNOLOGIA
APONTAMENTOS DE
ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
(V. Vectores)
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Índice
5. Vectores no plano e no espaço.......................................................................................... 1
5.1 Introdução ........................................................................................................................... 1
5.2 Generalidades sobre vectores.............................................................................................. 2
5.3 Norma de um vector............................................................................................................ 6
5.4 Co-senos directores de um vector ....................................................................................... 9
5.5 Produto interno.................................................................................................................. 10
5.6 Ângulo entre dois vectores ............................................................................................... 12
5.7 Projecção ortogonal .......................................................................................................... 15
5.8 Produto externo ................................................................................................................ 17
5.9 Produto misto ................................................................................................................... 27
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
5. Vectores no plano e no espaço
5.1 Introdução
Muitas grandezas físicas, como velocidade, força, deslocamento e impulso, para serem completamente
identificadas, precisam, além da magnitude, da direcção e do sentido. Estas grandezas são chamadas
grandezas vectoriais ou simplesmente vectores. Geometricamente, vectores são representados por
segmentos (de recta) orientados (segmentos de rectas com um sentido de percurso) no plano ou no
espaço. A ponta da seta do segmento orientado é chamado ponto final ou extremidade e o outro é
chamado ponto inicial ou origem do segmento orientado.
Segmentos orientados com a mesma direcção, mesmo sentido e mesmo comprimento representam o
mesmo vector. A direcção, o sentido e o comprimento do vector são definidos como sendo a direcção,
o sentido e o comprimento de qualquer um dos segmentos orientados que o representam.
Este facto é análogo ao que ocorre com os números racionais e as fracções. Duas fracções representam
o mesmo número racional se o numerador e o denominador de cada uma delas estiverem na mesma
proporção. Por exemplo, as fracções 1/ 2 , 2 / 4 e 3 / 6 representam o mesmo número racional. A
definição de igualdade de vectores também é análoga à igualdade de números racionais. Dois números
racionais a / b e c / d são iguais, quando ad = bc . Dizemos que dois vectores são iguais se possuem o
mesmo comprimento, a mesma direcção e o mesmo sentido.
Como vimos, os elementos dos espaços vectoriais são designados por vectores. Em tudo o que se segue
n
vamos considerar o espaço vectorial real (euclidiano) com n dimensões,
todos os n-uplos ordenados de números reais,
n
= {( x1 , x2 ,..., xn ) : xi ∈ , i = 1, 2,..., n} . As definições e
os teoremas aqui apresentados poderão ser generalizados a
2
ou
3
que representa o espaço de
n
, contudo os exemplos serão limitados a
, onde os vectores têm representação geométrica.
Os elementos de
n
têm duas interpretações geométricas. Podem ser interpretados como pontos, neste
caso consideram-se x1 ,..., xn ∈
como as coordenadas do ponto, ou podem ser interpretados como
vectores, neste caso x1 ,..., xn ∈
são as componentes escalares do vector. Esta distinção é pouco
importante em termos matemáticos. Vamos representar os vectores de
exemplo, v
n
com uma seta por cima, por
(v1 ,..., vn ) , os pontos por letras maiúsculas e a origem por O = 0 = (0, 0,..., 0) .
1/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
5.2 Generalidades sobre vectores
Vamos começar por relembrar, de uma maneira sucinta, alguns conceitos sobre vectores. Para isso,
consideremos em
2
o segmento [ AB ] , como se ilustra na figura1.
Figura1 – Representação de um segmento em
2
O segmento [ AB ] pode ser orientado de A para B (o sentido a considerar é de A para B) ou de B para
A. Graficamente para se indicar o sentido de segmento usa-se uma seta.
Figura2 – Representação de vectores em
2
Definição1: A um segmento orientado [ AB ] de origem em A e extremidade em B, de que se conhece a
direcção, o sentido e o comprimento, dá-se o nome de vector. E representa-se por v
AB .
Obs.1: Sendo [ AB ] um segmento orientado está implícita a direcção e o sentido.
2/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Através da definição conclui-se que um vector v
Vectores
AB fica de totalmente definido se conhecermos:
i) o sentido, por exemplo, de A para B;
ii) a direcção, entre A e B;
iii) o comprimento, a distância entre os pontos A e B (ou seja, o comprimento do segmento [ AB ] , isto
é, AB ) dada pela norma do vector e representada por v , como veremos mais adiante.
Obs.2: O vector nulo é representado por 0 , uma vez que tem comprimento nulo. Note-se que 0 não
tem direcção (não está associada qualquer direcção).
O vector é “livre”, no sentido que não tem posição fixa, ao contrário do ponto e do segmento orientado.
Por exemplo, o vector v
AB pode ser representado por um segmento orientado com origem no ponto
A. Mas, poderia ser representado por um segmento orientado cujo ponto inicial poderia estar em
qualquer outro lugar, deste que tenha a mesma orientação e comprimento.
Figura3 – Representação de vectores em
2
Todos os vectores da figura3 representam o mesmo vector, com excepção do vector v4 , que apesar de
ter a mesma direcção, tem sentido e comprimento diferentes dos demais.
Definição2: Vectores com a mesma direcção dizem-se vectores colineares.
Definição3: Vectores com a mesma direcção, o mesmo sentido e o mesmo comprimento, dizem-se
vectores equipolentes.
3/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Como se pretende determinar um vector pelo seu comprimento, direcção e sentido, os vectores
equipolentes são considerados iguais mesmo que estejam situados em posições diferentes. Se u e v
são equipolentes então u
v.
Como ilustra a figura2, considerando um ponto A e um vector v aplicado em A (a origem). Somando a
A o vector v , obtém-se o ponto B, extremidade do segmento orientado [ AB ] , e escreve-se
A+v = B
v = B − A . Assim, representa-se um vector pela diferença entre os pontos extremidade e
origem, ou seja, v = AB = B − A . Ao somarmos ao ponto A o vector v obtém-se, como vimos, o ponto
B, dizendo-se que se efectuo uma translação, segundo a direcção de v .
Damos, agora, um significado geométrico à multiplicação escalar, adição e subtracção de vectores.
Definição4: Sejam u e v vectores quaisquer de
Sejam u = (u1 , u2 ) e v = (v1 , v2 ) dois vectores de
n
, a sua soma é u + v = (u1 + v1 , u2 + v2 ,..., un + vn ) .
2
. Tendo em conta a definição4, a soma destes
vectores é w = u + v = (u1 , u2 ) + (v1 , v2 ) = (u1 + v1 , u2 + v2 ) , representada geometricamente na figura4.
Figura4 – Adição de vectores em
2
A figura ilustra que, se u e v são dois vectores quaisquer, então a sua soma é determinada da maneira
que se segue: Colocar o vector v de maneira a que o seu ponto inicial coincida com a extremidade de
u . O vector w = u + v é representado pela seta que vai do ponto inicial de u ao ponto final de v .
A extremidade de w está localizado u1 unidades horizontais e u2 unidades verticais a partir da
extremidade de v . Geometricamente, a extremidade de w está localizada na extremidade de u , se u
sofrer uma translação paralela a ele próprio de tal forma que a sua origem coincida com a extremidade
de v . Assim, pode interpretar-se w como sendo a diagonal do paralelogramo com lados u e v .
4/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Definição5: Sejam u e v dois vectores quaisquer de
n
Vectores
a diferença entre u e v é u − v = u + (−v ) .
Para se interpretar geometricamente a diferença entre dois vectores, considera-se u , v ∈
2
. Pela
definição5, w = u − v = u + (−v ) = (u1 , u2 ) + (−v1 , −v2 ) = (u1 − v1 , u2 − v2 ) , ver figura5.
Figura5 – Subtracção de vectores em
2
Note-se que as componentes de w são a diferença entre as componentes de u e v . O vector w tem o
comprimento e a direcção de um vector que aponta a partir da extremidade de v para a extremidade de
u , como se ilustra na figura5. Por outras palavras, pode interpretar-se w geometricamente, pela
translação de um vector desenhado a partir da extremidade de v para a extremidade de u paralelo a si
próprio até que a sua origem esteja na origem do referencial.
A discussão apresentada em cima, pode levar-nos a pensar no vector que vai da extremidade de v à
extremidade de u , como sendo u − v , e não apenas uma translação paralela de u − v . De facto, é
conveniente e útil pensar-se em termos de translações paralelas de um dado vector, isto é, vectores que
têm a mesma direcção e comprimentos, mas com as suas origem “fora” da origem do referencial, como
representando o mesmo vector, mas desenhados em diferentes partes do espaço.
Definição6: Sejam u
(u1 ,..., un ) um vector de
n
diferente de zero e λ ∈
multiplicação escalar como sendo λ u = (λ u1 , λ u2 ,..., λ un ) ∈
Também neste caso, considerando u ∈
2
e λ∈
n
. Define-se λ u = 0 se λ
\ {0} . Define-se
0 ou u
0.
\ {0} , temos λu = λ (u1 , u2 ) = (λu1 , λu2 ) . O vector
λ u é chamado um escalar múltiplo de u , tem a mesma direcção de u , mas | λ | vezes o seu
comprimento. Caso λ > 0 os dois vectores têm o mesmo sentido, caso λ < 0 os vectores têm sentidos
opostos. Vectores escalares múltiplos uns dos outros como são paralelos, forma um conjunto
linearmente dependente.
5/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Figura6 – Multiplicação escalar de um vector em
Vectores
2
Caso λ = −1 , tem-se λ u = −u , o vector simétrico de u , que tem a mesma direcção e o mesmo
comprimento de u , mas sentido contrário.
Sejam u e v dois vectores com a mesma direcção, é sempre possível determinar um escalar λ , tal
que u = λ v (designada por condição de colinearidade de dois vectores). Como vimos, u e v têm a
mesma direcção; e o mesmo sentido ou sentido contrário caso o escalar seja positivo ou negativo.
Definição7: Os vectores u e v dizem-se paralelos se u = λ v ou v = λ u para algum escalar λ ≠ 0 .
Obs.3: Um vector pode ser representado em notação matricial como uma matriz linha ou coluna.
Como
2
e
3
são espaços vectoriais, os seus elementos verificam os axiomas dos espaços vectoriais.
Por exemplo, a figura4, ilustra que w = u + v = v + u , a soma de vectores é comutativa.
5.3 Norma de um vector
O comprimento de um vector u é definido como sendo o comprimento de qualquer um dos segmentos
orientados que o representam, é chamado de norma de u e representa-se por u .
Definição8: Seja u = (u1 ,..., un ) um vector de
n
, define-se norma euclidiana de u como sendo o
escalar u = u12 + ... + un2 . Equivalentemente, u = AB = B − A .
Obs.4: Há uma infinidade de normas que podemos definir em
n
. A norma euclidiana é motivada pela
fórmula do comprimento de um vector no plano, que se pode deduzir através do teorema de Pitágoras.
6/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Para noções geométricas é a mais natural, por isso, no âmbito desta disciplina, consideramos apenas a
norma euclidiana. Esta generaliza o conceito de módulo em
. Um espaço ao qual associamos uma
norma, designa-se por espaço normado.
Exemplo1:
Pelo
teorema
u = (u1 , u2 ) = (1, −3) ∈
2
é
de
Pitágoras,
verificamos
que
o
comprimento
do
vector
u = (u1 , u2 ) = (1, −3) = 12 + (−3) 2 = 10 . Este valor corresponde à
distância de O = (0, 0) ao ponto A = (1, −3) , ou ao comprimento do segmento [OA] , OA
Intuitivamente, pelo que foi apresentado, definir uma norma euclidiana em
n
10 .
, permite-nos sempre,
definir uma distância (o reciproco não é verdadeiro). De facto, sejam P1 ( x1 , y1 , z1 ) e P2 ( x2 , y2 , z2 )
pontos de
3
, sabemos que a distância entre eles é d ( P1 , P2 ) = ( x2 − x1 ) 2 + ( y2 − y1 ) 2 + ( z2 − z1 ) 2 . Por
outro lado, sendo u = P1 P2 = P2 − P1 = ( x2 − x1 , y2 − y1 , z2 − z1 ) , pela definição de norma, vem
P1 P2 = P2 − P1 = ( x2 − x1 )2 + ( y2 − y1 ) 2 + ( z2 − z1 ) 2 , ou seja, d ( P1 , P2 ) = P1 P2
a distância entre os
pontos P1 e P2 é igual à norma do vector por eles definido, P1 P2 .
Como conclusão, pelo que foi apresentado, uma vez que, os elementos de
2
e
3
, podem ser
considerados vectores ou pontos, salientam-se duas situações:
•
Se considerarmos pontos, a norma d ( P1 , P2 ) = P2 − P1 representa a distância entre dois pontos;
•
Para vectores, a norma d ( P1 , P2 ) = P2 − P1 corresponderá ao comprimento do vector definido por
P1 e P2 , P1 P2 = P2 − P1 .
Por outro lado, efectuando uma translação do vector de maneira a que tenha origem na origem do
referencial, v = P2 − P1 = P3 = d (O, P3 ) (a norma de P3 representa a distância deste ponto à origem),
onde P3 = P2 − P1 , ou seja, o comprimento do vector v = P1 P2 é numericamente igual ao comprimento
de um vector equipolente a v com origem na origem do referencial.
Vamos apresentar, sem demonstração, algumas propriedades da norma euclidiana.
7/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Teorema1: Seja u = (u1 , u2 ,..., un ) e v = (v1 , v2 ,..., vn ) dois vectores de
e λ∈
Vectores
n
, 0 = (0, 0,..., 0) o vector nulo
(um escalar), então:
(i) u ≥ 0 (mais precisamente u > 0 sse u ≠ 0 e u = 0 sse u = 0 );
(ii) −u = u ;
(iii) u + v ≤ u + v , ∀u , v ∈
(iv) u − v ≥ u − v , ∀u , v ∈
(v) uv = u v , ∀u , v ∈
(vi)
u
u
=
, ∀u , v ∈
v
v
n
(vii) u n = u ∀u ∈
n
n
n
;
n
;
;
com v ≠ 0 ;
, ∀n ∈
(viii) λu = λ u , ∀u ∈
n
n
;
, ∀λ ∈
.
A propriedade (iii) é conhecida como desigualdade triangular pois generaliza o resultado da geometria
euclidiana que diz que a soma dos comprimentos de dois lados de um triângulo é sempre maior ou
igual ao comprimento do outro lado. Pensando em termos de vectores de
2
, ao considerar um vector
u , com a sua origem na origem do referencial, e um vector v , com a sua origem na extremidade de u ,
como dois lados de um triângulo, ver figura4, então o lado que sobra é dado por u + v , verificando-se a
desigualdade triangular. A igualdade é atingida quando u = λ v ou v = λ u , com λ > 0 .
Figura7 – Versor de um vector de
2
, v = v vers(v )
Um vector com norma igual a 1 diz-se um vector unitário ( v = 1
v é um vector unitário).
Normalizar um vector é dividi-lo pela sua norma. Ao vector resultante dá-se o nome de versor. Seja por
exemplo, v , com v ≠ 1 , então vers (v ) =
v
e vers (v ) = 1 (claro que, se v = 1 , então ver(v ) = v ).
v
8/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Definição9: Dado um vector v define-se versor de v , como sendo o vector unitário com a mesma
v
1
direcção e sentido de v . Portanto, vers (v ) =
⇔ vers (v ) = λ v com λ =
.
v
v
Da propriedade (viii), onde se vê que a norma da multiplicação de um escalar por u é o produto entre o
u
1
1
u
módulo do escalar e a norma de u , se u 0 , então vers (u ) =
= u
= u
=
= 1, e
u
u
u
u
u
tem uma distância unitária a partir da origem, o que confirma o facto do versor ter comprimento 1.
u
5.4 Co-senos directores de um vector
A figura8 ilustra que a direcção de um vector é especificada pelo ângulo α que este faz com o eixo
das abcissas (eixo horizontal) ou pelo ângulo β que este faz com o eixo das ordenadas (eixo vertical).
Figura8 – Co-senos directores de um vector em
2
Tendo em conta que o comprimento do vector e v é v , da figura8, vem cos α =
v1
= sin β e
v
v2
= sin α . Assim, apesar de nem cos α ou cos β , só por si determinarem a direcção do
v
vector, juntos determinam completamente essa direcção, são designados por co-senos directores de v .
cos β =
Deste modo, a direcção do vector v em
2
pode ser determinada por u = (cos α , cos β ) =
v1 v2
.
,
v v
Portanto, pelo que foi dito, as componentes do vector u , os cosenos directores, são os cosenos dos
ângulos entre v e os eixos coordenados (entre os vectores da base canónica, porquê?). No espaço
vectorial
3
, os co-senos directores do vector v = (v1 , v2 , v3 ) são os co-senos dos ângulos entre v e
cada um dos três vectores unitários e1 , e2 e e3 que definem a base canónica de
ângulo entre o vector v e ei é cos α i =
3
. Assim, o co-seno do
vi
= ui , i = 1, 2,3 , e, analogamente a
v
2
, a direcção de um
9/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
vector não nulo de
3
v1 v2 v3
, ,
v v v
é especificada por u =
á mais clara quando se falar de ângulos em
n
Obs.5: Repare-se que se u =
i =1
2
3
e
cos α i ei , u
Vectores
. A interpretação deste resultado tornar-se-
.
1 , e que os cosenos directores coincidem com as
componentes do versor do vector não normalizado v (têm a mesma direcção de v ).
Exemplo2: O vector v = (v1 , v2 ) = (1, −3) de
especificada por u =
(
1
10
,
−3
10
)=
1
10
2
tem comprimento
(1, −3) , repare-se que u = u12 + u22 =
v = 10 ≠ 1 e direcção
( ) +( )
1
10
2
−3
10
2
=
1+ 9
10
=1,
ou seja, u é um vector unitário, uma vez que o seu comprimento é igual à unidade.
5.5 Produto interno ou escalar
2
Em
e
3
as noções habituais de ângulo e distância podem ser apresentados à custa do chamado
produto interno. Comecemos por considerar dois vectores de
produto interno, para depois a generalizarmos a
de
2
n
2
para deduzirmos a expressão do
. Suponha-se u = (u1 , u2 ) e v = (v1 , v2 ) dois vectores
, diferentes do vector nulo. Sejam α e β os ângulos entre u e v e a parte positiva do eixo
horizontal (das abcissas), respectivamente, medidos na direcção contrária à dos ponteiros do relógio
(directa). Supondo ainda que α > β , seja θ = α − β . Então, θ é o ângulo entre u e v medido na
direcção contrária à dos ponteiros do relógio, como ilustra a figura9.
Figura9 – Ângulo entre dois vectores de
2
10/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Em particular, se u e v forem vectores não nulos de um espaço bi-dimensional ou tri-dimensional, e
assumindo que esses vectores tem a mesma origem. Quando se refere ao ângulo entre u e v , queremos
dizer o ângulo θ determinado por u e v que satisfaça 0 θ
π (o ângulo entre dois vectores é
definido como sendo o ângulo mais pequeno entre eles).
A partir da fórmula de subtracção para o co-seno vem
cosθ = cos(α − β ) = cos α cos β + sin α sin β ⇔ cosθ =
uma vez que
cos α =
u1v1
uv
u v + u2 v2
+ 2 2 = 11
,
u v
u v
u v
u1
v
u
v
, cos β = 1 , sin α = 2 e sin β = 2 .
u
v
u
v
Analogamente, se u = (u1 , u2 , u3 ) e v = (v1 , v2 , v3 ) forem dois vectores de
e se θ for o ângulo positivo mais pequeno entre u e v , então cos θ =
3
, diferentes do vector nulo
u1v1 + u2 v2 + u3v3
.
u v
Generalizando, sejam u = (u1 , u2 ,..., u3 ) e v = (v1 , v2 ,..., vn ) dois vectores de
nulo e se θ for o ângulo positivo mais pequeno entre u e v , então cos θ =
n
, diferentes do vector
u1v1 + u2 v2 + ... + un vn
.
u v
Definição10: Sejam u e v dois vectores de um espaço vectorial E qualquer, define-se produto interno
entre estes dois vectores por u ⋅ v = u | v = u v cosθ , onde é o ângulo entre os vectores u e v .
Quando os vectores são dados em termos das suas componentes não conhecemos directamente o
ângulo entre eles. Por isso, precisamos de encontrar uma forma de calcular o produto interno que não
necessite do ângulo entre os vectores.
Caso u e v sejam dois vectores de
n
, uma vez que, cos θ =
u1v1 + u2 v2 + ... + un vn
, o produto interno
u v
entre estes vectores é u ⋅ v = u v cosθ = u1v1 + u2 v2 + ... + un vn (porquê?).
Obs.6: Escrevendo u e v como matrizes coluna, U e V , respectivamente, vem u ⋅ v = U T V = V T U .
Note-se que o produto interno entre dois vectores de
n
é um escalar (um número que pertence a
)e
não um vector. Por este motivo, ao produto interno também se dá o nome de produto escalar.
Principalmente na literatura inglesa pode aparecer a designação u , v .
11/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
No teorema seguinte apresentam-se algumas propriedades, sem demonstração, do produto interno.
e um escalar λ ∈ :
n
Teorema2: Para quaisquer vectores u , v e w de
i) u | v = v | u (comutatividade);
ii) (λ u ) | v = λ (u | v ) (associatividade);
iii) u | (v + w) = u | v + u | w (distributividade);
iv) u | u = u
2
≥0;
v) u | u = 0 sse u = 0 ;
vi) u | v ≤ u v (desigualdade de Cauchy-Schwarz);
vii) u | v =
1
4
2
2
u + v − 14 u − v ;
Obs.7: Evite o erro seguinte: u | v = u | w ⇔ v = w . O correcto é
u | v = u | w ⇔ u | v − u | w = 0 ⇔ u | (v − w) = 0 ⇔ u ⊥ (v − w) .
Exemplo3: Para se obter um contra-exemplo, relativamente à última observação, considere-se
u = (1, 0, 0) , v = (4, 2,1) e w = (4,1,1) vectores de
3
, temos u | v = 4 = u | w apesar de v ≠ w .
Obs.8: Como foi referido, a norma euclidiana é a mais usada em
2
de estar associada a um produto interno v | v = v
n
, uma das razões disso, é o facto
⇔ v = v | v , ∀v ∈
n
, de facto,
v | v = (v1 , v2 ,..., vn ) | (v1 , v2 ,..., vn ) = v12 + v22 + ... + vn2 ⇔ v | v = v12 + v22 + ... + vn2 = v .
5.3 Ângulo entre dois vectores de
2
e
3
A definição de produto interno permitir-nos definir ângulos entre dois vectores quaisquer não nulos.
Vamos definir o ângulo entre dois vectores de
Tendo em conta que cosθ =
−1 ≤
2
e
3
.
u |v
, e, uma vez que, a desigualdade de Cauchy-Schwarz garante que
u v
u |v
≤ 1 (porquê?) para quaisquer vectores não nulos u e v de
u v
n
, ou seja, −1 ≤ cos θ ≤ 1 .
Pode então enunciar-se a seguinte definição.
12/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Definição11: Sejam u e v vectores não nulos de
θ = arccos
2
u |v
u v
ou
3
Vectores
, então o ângulo entre u e v é o número
, 0 ≤θ ≤π .
Exemplo4: Cálculo do ângulo entre a diagonal de um cubo e uma das suas arestas.
Resolução: Seja k o comprimento de cada aresta, vamos considerar as seguintes coordenadas,
v1 = (k , 0, 0) , v2 = (0, k , 0) e v3 = (0, 0, k ) , como se ilustra na figura10.
Figura10 – Cubo com arestas de comprimento k
Uma diagonal do cubo é representada pelo vector u = (k , k , k ) = v1 + v2 + v3 . O co-seno do ângulo entre
u e v2 é cos θ =
v2 | u
v |e
k2
1
= 2 2 =
=
. Assim, θ = arccos
v2 u
v2 e2
3
k 3k 2
( ) ≈ 54, 74º.
3
3
Seja θ o ângulo entre u e v , recorde-se que 0 ≤ θ ≤ π . Portanto, se u e v forem vectores, não nulos
de
2
ou
3
, com u | v = 0 , então pela definção11, o ângulo entre u e v é θ = arccos(0) =
π
2
, ou seja,
os vectores são perpendiculares, também designados por ortogonais. O que motiva a seguinte definição.
Definição12: Os vectores u e v de
2
ou
3
, dizem-se perpendiculares, u ⊥ v , sse u | v = 0 .
Exercício1: Mostre que u | v = (e1 − 3e2 ) | (2e1 + 3e2 ) = −7 .
Se dois vectores u e v forem perpendiculares (ortogonais) então qualquer escalar múltiplo de um
deles, λ u ou α v , é perpendicular ao outro, v ou u , respectivamente
13/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
É uma convenção conveniente na matemática não restringir esta definição de ortogonalidade a vectores
não nulos. Uma vez que, resulta da definição que 0 é ortogonal a qualquer vector de
0 | u = 0 . Para além disso, 0 é o único vector de
n
n
, pois
que tem esta propriedade.
Teorema3: Sejam u e v vectores não nulos de um espaço bi-dimensional ou tri-dimensional, seja θ
(0 θ
π ) o ângulo entre eles, então:
(i) θ é agudo ( 0 ≤ θ < 90º) sse u | v > 0 ;
(ii) θ é obtuso ( 90º< θ ≤ 180º ) sse u | v < 0 ;
(iii) θ é recto sse ( θ = 90º ) u | v = 0 .
Como sabemos, dois vectores são paralelos quando um deles for um escalar múltiplo não nulo do outro.
A partir da demonstração da desigualdade de Cauchy-Schawrz, quando u e v são paralelos, então
u | v = u v (porquê?). Assim, se θ for o ângulo entre u e v , cosθ =
u|v
= ±1 , donde, θ = 0 ou
u v
θ = π , ou seja, u e v apontam na mesma direcção ou apontam em direcções opostas (têm o mesmo
sentido ou sentidos opostos).
1
Exemplo5: Os vectores u = (1, −3) e v = (−2, 6) são paralelos uma vez que u = − v ( λ = − 12 ). Note2
se que u | v = −20 e u v = 10 40 = 20 , u | v = − u v . Resulta que o ângulo entre u e v é θ = π ,
ou seja, estes vectores têm a mesma direcção mas sentidos opostos (apontam em direcções opostas).
2
Dois resultados importantes sobre triângulos em
e
3
são a desigualdade triangular e o teorema de
Pitágoras, vamos ver de que maneira estão relacionados.
A desigualdade triangular foi apresentada como sendo a propriedade (iii) da norma euclidiana
(teorema1), cite-se, se u e v forem vectores de
n
, então
u +v ≤ u + v .
Vamos
demonstrar
esta desigualdade visando a obtenção do teorema de Pitágoras. Utilizando a obs.8 vem
u +v
2
2
= (u + v ) | (u + v ) = u | u + 2(u | v ) + v | v = u + 2(u | v ) + v
2
e, uma vez que, pela desigualdade de Cauchy-Schwarz, u | v ≤ u v , resulta
14/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Donde u + v
2
u +v
2
2
2
2
≤ u +2 u v + v
2
=( u + v
)
2
Vectores
⇔ u +v ≤ u + v .
= u + v sse u | v = 0 (porquê?), isto é, sse u ⊥ v . Resultando o seguinte teorema.
n
Teorema4 (teorema de Pitágoras): Os vectores u e v de
Obs9.: O teorema4 generaliza o teorema de Pitágoras a
Teorema5: Vectores v1 ,..., vn ∈
n
n
são ortogonais sse u + v
2
2
2
= u + v .
.
não nulos e ortogonais dois a dois forma um conjunto L.I..
Definição13: Seja S um subespaço de
n
. Uma base de V constituída por vectores ortogonais dois a
dois diz-se uma base ortogonal de V. Uma base ortogonal cujos vectores têm norma 1 diz-se uma base
ortonormada de V.
Uma condição necessária e suficiente para que os vectores v1 , v2 ,..., vn de
n
constituam uma base
ortonormada é que
1, se i = j
0, se i ≠ j
o que garante que os vectores são unitários, ortogonais dois a dois e formam um conjunto L.I..
vi | v j =
Exemplo6:
1) A base canónica de
n
é uma base ortonormada;
2) As bases {(2, 0), (0,3)} e {(2,1), (3, −6)} são bases ortogonais de
2
, mas não são ortonormadas.
5.7 Projecção ortogonal
Em muitas aplicações é de interesse “decompor” um vector v na soma (combinação linear) de dois
termos, um paralelo e outro perpendicular a determinado vector u . Se v e u estiverem posicionados
de maneira a que os seus pontos iniciais coincidam num ponto P , podemos decompor o vector v da
seguinte maneira (ver figura11): Traçar uma perpendicular a partir da extremidade de v até u , e
construir o vector w1 com ponto inicial em P e extremidade na intersecção desta perpendicular com
u . Por outro lado, sabemos que w2 = v − w1 . Como ilustra a figura11, os vectores w1 e w2 são,
paralelo e perpendicular a u , respectivamente, e w1 + w2 = w1 + (v − w1 ) = v .
15/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Figura11 – Projecção ortogonal
O vector w1 é chamado a projecção ortogonal de v em u ou vector componente de v ao longo de u e
é representado por w1 = proju v . O vector w2 é chamado vector componente de v ortogonal a u . Como
w2 = v − w1 , vem w2 = v − proju v . O teorema6 fornece fórmulas para se calcular estas duas igualdades.
2
Teorema6: Se v e u são vectores de
i) w1 = proju v =
v |u
u
2
3
ou
e se u ≠ 0 , então:
u , vector componente de v ao longo de u ;
ii) w2 = v − proju v = v −
v |u
u
2
u , vector componente de v ortogonal a u .
Obs.10:
(i) A projecção ortogonal de um vector v sobre um vector u não depende da norma de u , ou seja, para
qualquer λ > 0 , projλu v = proju v .
(ii) Dados três vectores u , v e w , tais que w ≠ 0 , então projw (u + v ) = projw u + projw v .
Exemplo7: Sejam v = (−1, 2,1) e u = (1, −1, −2) . Calcule a projecção ortogonal de v em u e o vector
componente de v ortogonal a u .
Resolução:
i) A projecção ortogonal de v em u é proju v =
v |u
u
2
u=
(−1, 2,1) | (1, −1, −2)
(1, −1, −2)
2
(1, −1, −2) = − 56 (1, −1, −2) .
ii) O vector componente de v ortogonal a u é v − proju v = (−1, 2,1) + 56 (1, −1, −2) = 16 (−1, 7, −4) . Claro
que, proju v ⊥ (v − proju v ) , de facto, 16 (−1, 7, −4) | 16 (−5,5,10) = 16 × (5 + 35 − 40) = 0 .
16/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Uma fórmula para o comprimento da projecção ortogonal de v ao longo de u pode ser obtido
escrevendo w1 = proju v =
v |u
u
2
u =
v |u
u
u =
2
|v |u |
u
2
u ⇔ proju v =
|v |u |
. Considerando θ o
u
ângulo entre v e u , então v | u = v u cos θ , donde proju v = v | cos θ | . A interpretação geométrica
deste resultado é ilustrada pela figura12.
Figura12 – Interpretação da projecção ortogonal
Exemplo8: Sejam v = (2, −1, 3) e u = (4, −1, 2) . Encontre dois vectores w1 e w2 tais que v = w1 + w2 ,
w1 é paralelo a u e w2 é perpendicular a u .
Resolução: Como u | v = 15 e u
w1 = proju v =
v |u
u
2
2
= 21 , vem
u = ( 15
)(4, −1, 2) = ( 207 , − 75 , 107 ) e w2 = v − w1 (2, −1,3) − ( 207 , − 57 , 107 ) = (− 67 , − 72 , 117 ) .
21
5.8 Produto externo ou produto vectorial entre dois vectores de
Em muitas aplicações de vectores de
3
3
a problemas de engenharia, geometria e física,..., tem
interesse construir um vector que é perpendicular a dois vectores dados. Como foi visto, não existe uma
generalização para se definir o operador multiplicação de vectores em
n
, onde o produto resultante
seja um vector da mesma dimensão. Vamos definir um tipo de multiplicação entre dois vectores, cujo
resultado é um vector (chamado produto externo ou vectorial), apenas com aplicação em
3
.
Dedução da expressão cartesiana do produto externo. Sejam u = (u1 , u2 , u3 ) e v = (v1 , v2 , v3 ) dois
vectores de
3
, não paralelos. Queremos encontrar um terceiro vector w = ( w1 , w2 , w3 ) perpendicular a
u e v . Como estamos a supor que u e v forma um conjunto linearmente independente (porquê?), a
17/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
direcção do vector procurado é univocamente determinado por u e v . Assim, como se pretende-se que
w | u = 0 e w | v = 0 , temos que resolver as equações
u1 w1 + u2 w2 + u3 w3 = 0
v1 w1 + v2 w2 + v3 w3 = 0
em ordem a w1 , w2 e w3 . Como {u , v} é linearmente independente a matriz do sistema
A=
u1 u2
u3
v1
v3
v2
tem característica 2, portanto, existe um determinante principal de ordem 2 (maior determinante
diferente de zero que se pode extrair da matriz da matriz). Suponhamos que
∆2 =
u1
v1
u2
≠ 0,
v2
assim, vamos considerar como principais as incógnitas w1 e w2 e como livre a variável w3 (poderiam
ser outras). Como não há determinantes característicos e existem incógnitas não principais o sistema é
possível e indeterminado (tem mais incógnitas do que equações). Pelo que foi dito
u1 w1 + u2 w2 + u3 w3 = 0
v1 w1 + v2 w2 + v3 w3 = 0
a matriz ampliada do sistema é [ A | B ] , onde A =
| A1 |=
−u3 w3
u2
−v3 w3
v2
u1 w1 + u2 w2 = −u3 w3
v1 w1 + v2 w2 = −v3 w3
u1 u2
v1 v2
= (−u3 v2 + u2 v3 ) w3 e | A2 |=
Vindo, pela regra de Cramer, w1 =
w3 ∈
⇔
,
| A |= u1v2 − u2 v1 e B =
u1
−u3 w3
v1
−v3 w3
| A1 | (−u3 v2 + u2 v3 ) w3
=
| A|
u1v2 − u2 v1
−u3 w3
−v3 w3
, portanto
= (−u1v3 + u3 v1 ) w3 .
e w2 =
| A2 | (−u1v3 + u3 v1 ) w3
=
, como
| A|
u1v2 − u2 v1
, façamos w3 =| A |= u1v2 − u2 v1 , resultando
w1 = −u3 v2 + u2 v3 =
−u3
u2
−v3
v2
e w2 = −u1v3 + u3 v1 =
u1
−u3
v1
−v3
.
O processo de obtenção das componentes do vector w = (u2 v3 − u3 v2 , u3 v1 − u1v3 , u1v2 − u2 v1 ) não é
único. Define-se w como sendo o produto externo ou vectorial entre u e v , relembre-se que este
vector é ortogonal a u e v , por hipótese.
18/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Definição14: Sejam u = (u1 , u2 , u3 ) e v = (v1 , v2 , v3 ) vectores de
3
Vectores
, define-se produto externo entre u
e v ao vector, u × v = u v = (u2 v3 − u3v2 , u3v1 − u1v3 , u1v2 − u2 v1 ) .
Como mnemónica para a expressão u × v , pode usar-se o “determinante simbólico” que passamos a
deduzir. Como sabemos, os vectores da base canónica, e1 = (1, 0, 0) , e2 = (0,1, 0) e e3 = (0, 0,1) são
vectores unitários (de norma igual um) e paralelos aos eixos coordenados. Todo o vector v = (v1 , v2 , v3 )
de
3
pode ser escrito como combinação linear de e1 , e2 e e3 , pois
v = (v1 ,0, 0) + (0, v2 , 0) + (0, 0, v3 ) = v1 (1, 0, 0) + v2 (0,1, 0) + v3 (0, 0,1) = v1e1 + v2 e2 + v3 e3 .
Portanto, v = (v1 , v2 , v3 ) = v1e1 + v2 e2 + v3e3 e u = (u1 , u2 , u3 ) = u1e1 + u2 e2 + u3e3 , do mesmo modo
u × v = (u2 v3 − u3v2 , u3v1 − u1v3 , u1v2 − u2 v1 ) = (u2 v3 − u3v2 )e1 + (u3v1 − u1v3 )e2 + (u1v2 − u2 v1 )e3 ,
que é equivalente a
u×v =
u2
u3
v2
v3
e1 −
u1 u3
v1
v3
e2 +
u1 u2
e.
v1 v2 3
Resultado obtido como consequência da aplicação do teorema de Laplace à primeira linha do seguinte
determinante
e1
e2
u × v = u1 u2
v1 v2
e3
u3 .
v3
Obs.11: Não se trata de um verdadeiro determinante, já que na primeira linha temos os vectores e1 , e2
e e3 da base canónica de
3
e não números.
Outra maneira de determinar as componentes de u × v é através da matriz A =
u1
u2
u3
v1
v2
v3
.
(2×3)
• 1ª componente do produto externo é obtida do determinante que resulta de A suprimindo a 1ª coluna;
• 2ª componente obtida do determinante que resulta de A suprimindo a 2ª coluna afectado do sinal
negativo;
• 3ª componente obtida do determinante que resulta de A suprimindo a 3ª coluna.
19/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Existe uma diferença importante entre o produto interno e o produto externo de dois vectores de 3 .
Enquanto o primeiro é um escalar, o produto externo (vectorial) é um vector. No teorema seguinte,
dão-se algumas relações importantes (sem demonstração) entre o produto interno e o produto externo.
Teorema7 (Relações envolvendo o produto interno e o externo): Sejam u , v e w vectores de
3
:
(i) u | (u × v ) = 0 , ( u × v é ortogonal a u , u × v ⊥ u ).
(ii) v | (u × v ) = 0 , ( u × v é ortogonal a v , u × v ⊥ v ).
(iii) u × v
2
= u
2
v
2
− (u | v ) 2 (identidade de Lagrange).
(iv) u × (v × w) = (u | w)v − (u | v ) w .
(v) (u × v ) × w = (u | w)v − (v | w)u .
Obs.12: As propriedades (i) e (ii) significam, que w = u × v é perpendicular ao plano formado pelos
vectores envolventes u e v .
Exemplo9: Calcule o produto externo entre u = (1, 2,3) e v = (1, −1,1) .
Resolução: Tendo em conta a definição de produto externo, vem
w = u × v = (u2 v3 − u3v2 , u3v1 − u1v3 , u1v2 − u2 v1 ) = (2 + 3,3 − 1, −1 − 2) = (5, 2, −3) .
Note-se que, u | (u × v ) = (1, 2,3) | (5, 2, −3) = 5 + 4 − 9 = 0 e v | (u × v ) = (1, −1,1) | (5, 2, −3) = 5 − 2 − 3 = 0 ,
o que mostra que u ⊥ (u × v ) e v ⊥ (u × v ) . É também de interesse verificar que
v × u = (−3 − 2,1 − 2, 2 + 1) = (−5, −2,3) = −(u × v ) ,
3
o que se verifica para todos os vectores u e v de
Relativamente aos vectores da base canónica de
3
.
, a partir da definição de produto externo podemos
obter as seguintes relações:
e1 × e2 = e3 e e2 × e1 = −e3 ;
e2 × e3 = e1 e e3 × e2 = −e1 ;
e3 × e1 = e2 e e1 × e3 = −e2 ,
isto é, o produto externo entre dois vectores da base canónica dá o outro vector ou o seu simétrico.
Tem-se, ainda, que e1 × e1 = 0 , e2 × e2 = 0 e e3 × e3 = 0 , uma vez que os vectores são colineares entre si.
Tendo por base, os resultados do produto externo entre os vectores da base canónica, apresentam-se,
sem demonstração, algumas propriedades do produto externo.
20/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Teorema8: Para quaisquer vectores u , v e w de
3
Vectores
e um número real λ . Tem-se
(i) u × v = −(v × u ) (o produto externo não é comutativo, é anti-comutativo).
(ii) u × (v + w) = (u × v ) + (u × w) e (u + v ) × w = (u × w) + (v × w) (o produto externo é distributivo em
relação à soma de vectores).
(iii) λ (u × v ) = (λ u ) × v = u × (λ v ) .
(iv) u × 0 = 0 × u = 0 .
(v) u × u = 0 , ou, u × v = 0 ⇔ u = λ v
v = λu .
Obs.13: A propriedade (v) diz que dois vectores u e v de
3
são paralelos sse u × v = 0 .
Exemplo10: Seja u = (1, 2,3) , v = (1, −1,1) e w = (1,1,1) , Verifique que (u × v ) + (v × w) ≠ v × (u + w) .
Resolução: Tendo em conta o exemplo anterior, u × v = (5, 2, −3) , uma vez que
e1
v×w= 1
1
e2
e3
−1 1 = −2e1 + 2e3 = (−2, 0, 2) ,
1 1
obtemos (u × v ) + (v × w) = (5, 2, −3) + (−2, 0, 2) = (3, 2, −1) . Por outro lado, como,
v × (u + w) = (1, −1,1) × (2,3, 4) = (−7, −2, 5) ,
sai, (u × v ) + (v × w) ≠ v × (u + w) , basta ter em conta a propriedade (ii) do produto externo. O correcto é
(u × v ) + (v × w) = (u × v ) − ( w × v ) = (u − w) × v , ou (u × v ) + (v × w) = −(v × u ) + (v × w) = v × (−u + w) .
Obs.14: Atenção que u × v = u × w
v = w não é verdade (exercício!).
Como o produto externo é um vector, é orientado em determinada direcção, tem um sentido, e um
comprimento. A figura13 ilustra o produto externo, u × v , entre dois vectores quaisquer u e v de
3
.
Figura13 – Representação geométrica do produto externo
21/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Relativamente à direcção, vimos que u × v é perpendicular aos vectores u e v . Quanto ao sentido, a
partir da visualização da figura13 é possível imaginar uma regra para determinar o sentido do produto
externo, designada por regra da mão direita. O sentido de u × v é o do polegar quando se curva os
dedos da mão direita no sentido em que se faz rodar o 1º vector (neste caso o u ) para coincidir como o
2º (neste caso o v ), segundo o menor ângulo, θ , entre estes (pratique esta regra com os vectores da
base canónica).
Figura14 – Sentido do produto externo u × v , regra da mão direita
Quanto ao comprimento do vector produto externo, seja θ o ângulo entre u e v . Da identidade de
Lagrange resulta
u ×v = u
2
2
v − (u | v )2 = u
2
2
v − ( u v cos θ ) 2 = u
2
2
v (1 − cos 2 θ ) = u
2
2
v sin 2 θ .
Tem-se, portanto
u ×v
2
= u
2
2
v sen 2 θ ,
desembaraçando de quadrados, e, tendo em conta que sin θ ≥ 0 , uma vez que por definição de ângulo
entre dois vectores, 0 ≤ θ ≤ π , tem-se o seguinte resultado.
Teorema9: Se θ for um ângulo entre dois vectores u , v de
3
, então u × v = u v sen θ .
Obs.15: Atenção que u × v = u v sen θ não faz sentido, uma vez que u × v é um vector (produto
vectorial) e u v sen θ é um número real (escalar).
Tendo em conta o que foi dito, podemos enunciar a seguinte definição:
22/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Definição15: Sejam u e v dois vectores de
3
Vectores
. Definimos o produto externo u × v , como sendo o
vector com as seguintes características:
(i) Tem direcção perpendicular a u e v ;
(ii) Tem o sentido dado pela regra da mão direita.
(iii) Tem comprimento u × v = u v sen θ .
As três propriedades da definição15 determinam completamente o vector u × v . As propriedades (i) e
(ii) determinam a orientação, enquanto (iii) o comprimento. Como as propriedades de u × v dependem
apenas do comprimento e posição relativa de u e v e não do sistema de coordenadas utilizado, o
vector u × v permanecerá inalterado se introduzirmos um diferente sistema de coordenadas. Este
resultado é importante quando se trabalha com diferentes sistemas de coordenadas ao mesmo tempo.
Pelo que foi dito, dados dois vectores u e v , é sempre possível determinar a orientação de u × v . Para
se identificar completamente u × v , geometricamente, necessitamos apenas saber o seu comprimento.
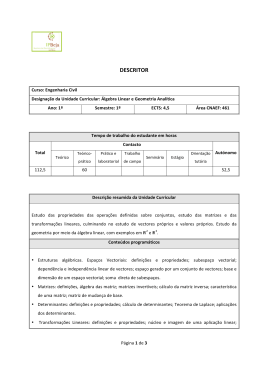
Interpretação geométrica do produto externo. O teorema9 tem várias consequências interessantes.
Uma delas é a interpretação geométrica da norma de u × v . Se desenharmos um paralelogramo com
lados adjacentes u e v , figura15, a altura do paralelogramo é h = v sin θ (pois sin θ =
h
v
), onde θ é
o ângulo entre u e v . Repare-se que, neste caso os vectores {u , v} é L.I., pois u × v ≠ 0 .
Figura 15 – A altura do paralelogramo é h = v sin θ
Deste modo, como a área de um paralelogramo é dada pelo produto entre os comprimentos da base e da
altura, é igual a A = u v sin θ , e pelo teorema9 u v sin θ = u × v = A .
23/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
3
Teorema10: Sejam u e v dois vectores de
Vectores
. Então a área do paralelogramo com lados adjacentes
u e v é numericamente igual à norma de u × v , A = u × v .
Figura16 – Paralelogramo de lados adjacentes u e v
Corolário1 Sejam u e v dois vectores de
numericamente igual a A =
3
. Então a área do triângulo com lados adjacentes u e v é
1
u ×v .
2
Exemplo11: Calcule a área do paralelogramo definido pelos vectores u = (1,1,1) , v = (−1, −1, 2) .
Resolução: Como vimos pelo teorema10 a área do paralelogramo definido por u e v é numericamente
igual ao comprimento de u × v .
Como u × v = (3, −3, 0) , a área do paralelogramo pedido é A = u × v = (3, −3, 0) = 3 2 . Repare-se
que u | v = (1,1,1) | (−1, −1, 2) = 0 , ou seja, os vectores são perpendiculares e sin θ = π2 ⇔ θ = 1 . Logo,
usando a fórmula A = u × v = u v sin θ = u v = (1,1,1) (−1, −1, 2) = 3 6 = 3 2 .
O paralelogramo definido pelos vectores u = (1,1,1) é v = (−1, −1, 2) é um rectângulo definido em
A área do triângulo rectângulo definido pelos vectores u e v é A =
1
2
u ×v =
3
2
3
.
2.
Intuitivamente, resulta que, se u | v = 0 , o paralelogramo definido por u e v é um rectângulo ou um
quadrado e A = u × v = u v , por outro lado, o triângulo definido por estes vectores é rectângulo e
A =
1
2
u ×v =
1
2
u v .
24/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Exemplo12: Calcule a área de um paralelogramo definido em
2
Vectores
utilizando o produto externo.
Resolução: Considere-se um paralelogramo P no plano com vértices em (1,1) , (3, 2) , (4, 4) e (2,3) ,
representado na figura17.
Figura17 – Paralelogramo com vértices (1,1) , (3, 2) , (4, 4) e (2,3)
Dois lados adjacentes são dados pelos vectores, de (1,1) a (3, 2) , isto é, u = (3, 2) − (1,1) = (2,1) , e de
(1,1) a (2,3) , isto é, v = (2,3) − (1,1) = (1, 2) . Como, estamos a trabalhar com dois vectores de
não de
3
2
,e
, não se pode calcular o seu produto externo. Consideramos os vectores w = (2,1, 0) e
r = (1, 2, 0) que representam lados adjacentes do mesmo paralelogramo estendido a
3
. Assim a área
de P é dado por w × r = (0, 0, 4 − 1) = (0, 0,3) = 3 .
O exemplo12 motiva o seguinte resultado que serve como interpretação geométrica para os
determinantes 2 × 2 . Considere-se um paralelogramo definido em
v = (v1 , v2 ) . Pelo teorema10 área de um paralelogramo definido em
a trabalhar com dois vectores de
2
, e não de
3
2
3
pelos vectores u = (u1 , u2 ) e
é A = u × v . Como, estamos
, para calcular o produto externo consideramos os
vectores u = (u1 , u2 , 0) e v = (v1 , v2 , 0) que representam lados adjacentes do mesmo paralelogramo
estendido a
3
e1
e2
. O produto externo, usando determinantes, é u × v = u1
v1
u2
v2
donde A = u × v = e3
u1
u2
v1
v2
= abs
u1
u2
v1
v2
e3
u
0 = e3 1
v1
0
u2
,
v2
, uma vez que e3 = 1 .
25/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Teorema11: Sejam u e v vectores de
2
Vectores
e M a matriz ( 2 × 2 ) cujas colunas (ou linhas) são as
2
componentes de u e v . Então, a área de um paralelogramo definido em
Exemplo13: Calcule a área de um paralelogramo definido em
2
é A =| det( M ) | .
com vértices (1,1) , (3, 2) , (4, 4) e
(2,3) utilizando um determinante de ordem 2.
Resolução: Pelo exemplo12, dois lados adjacentes do paralelogramo são dados pelos vectores
u = (2,1) e v = (1, 2) (porquê?), logo a área do paralelogramo é A =
Teorema12: Se os vectores u e v de
3
2 1
= 3.
1 2
formam um conjunto linearmente independente, o
determinante da matriz ( 3 × 3 ) cujas colunas (ou linhas) são u , v e u × v , respectivamente, é positivo.
Obs.16: Esta quantidade não é nula porque o conjunto dos vectores é linearmente independente.
Definição16: Sejam u , v e w ∈
3
vectores L.I., representados por segmentos orientados a partir da
origem. Dizemos que estes três vectores (por esta ordem) formam um triedro directo se a rotação mais
curta do vector u que o leva a sobrepor-se ao vector v é feita, para um observador com os pés na
origem e a cabeça na extremidade de w no sentido contrário ao dos ponteiros do relógio (ver figura18).
Figura18 – Triedro directo
Obs.17: Os vectores e1 , e2 e e3 da base canónica de
3
formam um triedro directo.
Teorema13: Se {u , v} é um conjunto L.I., os vectores u , v e u × v ∈
3
formam um triedro directo.
Obs.18: Prova-se que, se u e v forem ortogonais com norma unitária, então u , v e u × v constituem
uma base ortonormada.
26/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
5.9 Produto misto em
Vectores
3
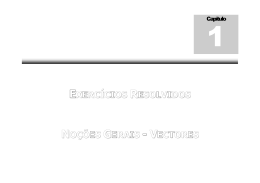
Pode estender-se os resultados do teorema10 para se calcular o volume de um paralelepípedo em
3
.
Suponha-se u , v e w as arestas adjacentes do paralelepípedo P, como se ilustra na figura19. Sabemos
que o volume V de P é igual ao produto da área da base, u × v , pela altura correspondente de P, ou
seja, pelo comprimento da projecção de w em u × v (porque u × v é perpendicular a u e a v ).
Figura19 – Paralelepípedo com arestas adjacentes u , v e w
Como
proju ×v w = w |
u×v
u×v
tem-se
V = u×v w|
u ×v
= w | (u × v ) .
u ×v
Definição17: Dados três vectores u , v e w de
3
, aplicados num ponto A (vértice do paralelepípedo
definido pelos três vectores), a quantidade w | (u × v ) (que é um escalar) denomina-se por produto
misto de u , v e w (por esta ordem), e, o seu módulo é numericamente igual ao volume do
paralelepípedo definido por esses vectores.
Obs.19: Não há necessidade de parênteses na expressão w | (u × v ) (escalar), pois a única forma de
entende-la é como o produto interno de w (vector) por u × v (vector); não faz sentido pensar em
produto externo de v (vector) por w | u (escalar).
27/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Obs.20: Sendo, o volume do paralelepípedo com arestas u , v e w dado por V = w | (u × v ) , o produto
misto pode ser negativo ou positivo:
i) w | (u × v ) > 0 , quando w faz um ângulo agudo com u × v .
ii) w | (u × v ) < 0 , quando w faz um ângulo obtuso com u × v .
Vamos deduzir a expressão cartesiana do produto misto em
os vectores de
3
3
(sistema ortonormado). Como sabemos
podem ser escritos como combinação linear dos vectores da base canónica, ou seja,
u = (u1 , u2 , u3 ) = u1e1 + u2 e2 + u3e3 , v = (v1 , v2 , v3 ) = v1e1 + v2 e2 + v3e3 e w = ( w1 , w2 , w3 ) = w1e1 + w2 e2 + w3e3 ,
assim,
u × v = (u2 v3 − u3 v2 , u3 v1 − u1v3 , u1v2 − u2 v1 ) = (u2 v3 − u3 v2 )e1 + (u3 v1 − u1v3 )e2 + (u1v2 − u2 v1 )e3 .
Então o produto misto pode ser escrito como
w | (u × v ) = ( w1e1 + w2 e2 + w3e3 ) | [ (u2 v3 − u3v2 )e1 + (u3v1 − u1v3 )e2 + (u1v2 − u2 v1 )e3 ] =
u1
u2
u3
= (u2 v3 − u3v2 ) w1 + (u3v1 − u1v3 ) w2 + (u1v2 − u2 v1 ) w3 = v1
v2
v3 ,
w1
w2
w3
ou seja,
u1
u2
u3
w | (u × v ) = v1
w1
v2
w2
v3 .
w3
Tendo em conta esta igualdade, podemos interpretar geometricamente um determinante de ordem 3,
como sendo numericamente igual ao volume de um paralelepípedo, determinado pelos vectores que
constituem as suas linhas.
Teorema14: Sejam u , v e w vectores de
3
, e A a matriz ( 3 × 3 ) cujas colunas (ou linhas) são u , v
e w . Então, o volume do paralelepípedo determinando por u , v e w é igual a | det( A) | .
Obs.21: Atendendo à definição de produto interno temos w | (u × v ) = w (u × v ) cos θ , onde θ é o
ângulo formado por w e (u × v ) .
28/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
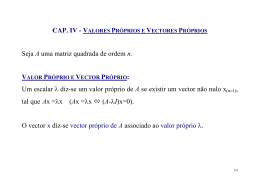
Exemplo14: Calcule o volume de um paralelepípedo cujas as arestas são definidas pelos vectores
u = (1, 4,1) , v = (−3,1,1) e w = (0,1,5) .
Resolução: O paralelepípedo P cujas arestas são definidas pelos vectores u = (1, 4,1) , v = (−3,1,1) e
w = (0,1,5) é apresentado na figura20. O módulo do produto misto é, numericamente igual ao volume
do paralelepípedo cujas arestas são definidas pelos vectores u , v e w .
Figura20 – Paralelepípedo com arestas u = (1, 4,1) , v = (−3,1,1) e w = (0,1,5)
Como u × v = (4 − 1, −3 − 1,1 + 12) = (3, −4,13) , V =| w | (u × v ) |=| (0,1,5) | (3, −4,13) |=| 0 − 4 + 65 |= 61 , o
1 −3 0
volume de P é 61. Ou, através do cálculo do determinante A = 4
1
1
1
1
5
V =| det( A) |= 61 .
Por outro lado, a fórmula V = w | (u × v ) permite verificar se três vectores pertencem ao mesmo plano.
Uma vez que três vectores que não estejam no mesmo plano determinam um paralelepípedo com
volume positivo, então V = w | (u × v ) = 0 se e só se u , v e w estiverem no mesmo plano.
Teorema15: Se os vectores u = (u1 , u2 , u3 ), v = (v1 , v2 , v3 ) e w = ( w1 , w2 , w3 ) tiverem os mesmo pontos
iniciais, então, pertencem ao mesmo plano (são complanares, paralelos a um mesmo plano) se e só se
w1
w2
w3
w | (u × v ) = u1
v1
u2
v2
u3 = 0 .
v3
29/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Apresentamos de seguida, sem demonstração, algumas propriedades do produto misto.
Teorema16: Sejam u , v e w vectores de
3
. Então
(i) Pela comutatividade do produto interno, tem-se w | (u × v ) = (u × v ) | w .
(ii) o produto misto é nulo, quando um dos vectores for nulo, quando os três vectores forem
complanares, ou quando dois vectores forem colineares (paralelos).
•
w | (u × v ) = 0 , se u = 0 v = 0 w = 0 , quando um dos vectores for nulo;
•
w | (u × v ) = 0 , se u = λ v
•
w | (u × v ) = 0 , se u , v e w forem complanares.
u × v = 0 , quando dois vectores forem colineares ( u v );
(podemos dizer que w | (u × v ) = 0 sse o conjunto {u , v , w} for linearmente dependente).
(iii) w | (u × v ) > 0 , se, e só se, (u , v , w) é uma base directa de
3
, ou seja, se, e só se u , v e w
satisfazem a regra da mão direita.
(iv) w | (u × v ) < 0 , se, e só se, (u , v , w) é uma base inversa de
3
.
(v) O produto misto não se altera por permutação circular dos três vectores, ou seja,
w | ( u × v ) = u | ( v × w ) = v | ( w × u ) (uma vez que, os determinantes que representam estes produtos
são iguais se trocarmos duas filas).
(vi) w | (u × v ) = − w | (v × u ) = −u | ( w × v ) = −v | (u × w) , o produto misto é alternado, isto é, trocando a
posição relativa de dois vectores o produto misto muda de sinal; (o produto misto muda de sinal,
mantendo o valor absoluto, quando se trocam dois dos seus vectores).
(vii) w | (u × v ) = ( w × u ) | v , o produto misto não se altera quando se trocam entre si os sinais de
produto vectorial e de produto interno, mantendo a posição dos vectores.
(viii) w | (u × v ) não se altera se a um factor se adiciona uma combinação linear dos outros dois (por
exemplo, w | (u × v ) = w | (u × (v + α u + β w)) ).
(ix) w | (u × v ) é trilinear, isto é,
w | ((α u1 + β u2 ) × v ) = w | (α u1 × v ) + w | ( β u2 × v ) = α w | (u1 × v ) + β w | (u2 × v ) ,
w | (u × (α v1 + β v2 )) = w | (u × α v1 ) + w | (u × β v2 ) = α w | (u × v1 ) + β w | (u × v2 )
e
(α w1 + β w2 ) | (u × v ) = α w1 | (u × v ) + β w2 | (u × v ) .
30/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
ÁREA DEPARTAMENTAL DE ENGENHARIA CIVIL
Vectores
Obs.22: As propriedades (v) e (vi) acima podem ser memorizadas observando-se a figura21.
Considerando o produto misto de u , v e w , por esta ordem, w | (u × v ) , seguindo as setas, obteremos o
sinal de +. Considerando o produto misto em sentido contrário ao das setas, obteremos o sinal de − .
Qualquer produto “num mesmo sentido” é o oposto do produto “em sentido contrário”, por exemplo,
u | (v × w) = −v | (u × w) .
Figura21 – Produto misto
31/31
APONTAMENTOS DE ÁLGEBRA LINEAR E GEOMETRIA ANALÍTICA
Download