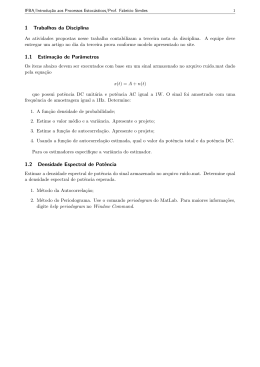
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 SÍNTESE DE CONTROLE DESACOPLADOR ROBUSTO Marianna A. S. Siqueira, Luiz F. G. Silva, Eduardo N. Gonçalves∗ Reinaldo M. Palhares† Ricardo H. C. Takahashi‡ ∗ Programa de Pós-graduação em Engenharia Elétrica UFSJ/CEFET-MG Departamento de Engenharia Elétrica - CEFET-MG, Av. Amazonas 7675 Belo Horizonte, MG, Brasil † Universidade Federal de Minas Gerais Departamento de Engenharia Eletrônica, Av. Antônio Carlos 6627 Belo Horizonte, MG, Brasil ‡ Universidade Federal de Minas Gerais Departamento de Matemática, Av. Antônio Carlos 6627 Belo Horizonte, MG, Brasil Email: [email protected], [email protected], [email protected], [email protected], [email protected] Abstract— The control of multivariable industrial processes based on multiloop configuration is very popular due to its simplicity. In the case of poor system performance caused by significant interaction between the control loops, a common strategy is to consider a decoupling control scheme that combines multiloop PID controllers with a decoupling precompensator. This paper presents a new robust decoupling control synthesis procedure which aims to decouple the different channels of a multivariable system and to guarantee the tracking response performance and disturbance rejection. The robust control problem is stated as a non-convex multiobjective optimization problem in the space of the PID controllers and decoupler parameters. The advantages of the proposed procedure are to compute suboptimal robust decoupling control with any desired structure and to consider polytopic models to represent the system uncertainty. The Wood and Berry binary distillation column model, a multivariable system considered in various previous works, is applied to demonstrate the effectiveness of the proposed synthesis procedure. Decoupling control, multiloop PID control, polytopic uncertainty. Keywords— Resumo— O controle de processos industriais multivariáveis com base em configuração multimalhas é muito popular devido à sua simplicidade. No caso de degradação do desempenho do sistema causado pela interação significativa entre as malhas de controle, uma estratégia comum é considerar um esquema de controle desacoplador que combina os controladores multimalhas PID com um pré-compensador desacoplador. Este artigo apresenta um novo procedimento de sı́ntese de controle desacoplador que pretende desacoplar os diferentes canais do sistema multivariável e garantir o desempenho da resposta de rastreamento e da rejeição de distúrbios. O problema de controle desacoplador robusto é formulado como um problema de otimização multiobjetivo não-convexo no espaço de parâmetros dos controladores PID e do desacoplador. As vantagens do procedimento proposto são calcular o controle desacoplador robusto com qualquer estrutura desejada e considerar modelos politópicos para representar a incerteza do sistema. O modelo de Woody e Berry de uma coluna de destilação binária, sistema multivariável considerado em vários trabalhos, é empregado para demonstrar a eficácia do procedimento de sı́ntese proposto. Palavras-chave— 1 Controle desacoplador, controle PID multimalhas, incerteza politópica. de controle desacoplador é uma das primeiras abordagens para lidar com interações indesejáveis entre malhas de controle. Este esquema de controle combina a simplicidade da configuração do controle PID multimalhas com um pré-compensator desacoplador, ou simplesmente desacoplador, como ilustrado na Fig. 1. Existem diferentes estratégias de desacoplamento como o desacoplador ideal, o desacoplador simplificado e o desacoplador invertido. Uma comparação entre essas estratégias é apresentada em Gagnon et al. (1998). A tarefa de desenvolver um controle desacoplador tem recebido grande interesse nas últimas décadas e novos resultados foram publicados recentemente (ver, por exemplo, Shen et al. (2012); Rajapandiyan and Chidambaram (2012); Garrido et al. (2013); Pradhan and Ghosh (2013) e Vu and Lee (2013) e referências Introdução Esquemas de controle proporcional-integralderivativo (PID) multimalhas são bastante populares na indústria porque são fáceis de entender, implementar e ajustar pelos operadores e as estruturas descentralizadas são tolerantes à falha (Dittmar et al., 2012). Existem vários métodos de sı́ntese de controle PID multimalhas relatados na literatura, tais como: método de dessintonia, os métodos de fechamento de malha sequenciais, métodos de sintonia independentes, métodos do relé de auto-ajuste e métodos de otimização (ver Dittmar et al. (2012) e suas referências). Se as interações entre as malhas de controle são significativas até mesmo o melhor sistema de controle PID multimalhas pode não fornecer um controle satisfatório. O esquema 3397 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 internas). A maioria das estratégias de sı́ntese de controle desacoplador calcula inicialmente o desacoplador para gerar um sistema resultante com uma matriz de transferência diagonal de tal forma que os métodos de sintonia dos controladores PID monovariáveis possam ser aplicados independentemente para cada malha de controle. Considere a Fig. 1, seja H(s) = diag{Hi (s)} ∈ Rm×m , Hi (s) 6= 0, i = 1, . . . , m, a matriz de transferência diagonal desejada de modo que P (s)D(s) = H(s). o problema de sı́ntese de controle desacoplador robusto. Diferentemente das abordagens convencionais, o procedimento de sı́ntese proposto calcula os controladores PID multimalhas e o desacoplador simultaneamente com base em um esquema de aproximação de modelo de referência. Um modelo de referência diagonal é considerado para garantir o desacoplamento e o desempenho da resposta de rastreamento do desempenho (Gonçalves et al., 2011; Gonçalves et al., 2012). É realizada a minimização da norma H∞ da matriz de transferência relacionando as saı́das da planta e os sinais de distúrbios a fim de melhorar a rejeição de distúrbios. As vantagens do procedimento proposto são considerar as incertezas do modelo, garantir que o desacoplador seja estável e causal e permitir que sejam estudadas a viabilidade de se obter desacopladores com diferentes estruturas e ordens. O modelo de uma coluna de destilação binária (Wood and Berry, 1973), sistema multivariável considerado em vários trabalhos, é empregado para demonstrar a eficácia do procedimento de sı́ntese proposto. A notação neste trabalho é padrão. A notação compacta: A B (3) G(s) = C D (1) Na metodologia do desacoplador ideal, geralmente Hi (s) = Pii , i = 1, . . . , m, os elementos da diagonal de P (s). O desacoplador ideal é calculado como sendo D(s) = P −1 (s)H(s). (2) A vantagem do desacoplador ideal é que é mais fácil sintonizar os controladores PID com base em uma H(s) de baixa complexidade. Como o desacoplador ideal é baseado no inverso da planta, o desacoplador resultante pode apresentar elementos de ordem elevada e até mesmo ser não-causal ou instável. Uma segunda estratégia de desacoplamento é o desacoplador simplificado que define os elementos da diagonal principal do desacoplador como sendo 1 e calcula os elementos fora da diagonal de modo que H(s) seja uma matriz de transferência diagonal. Neste caso, D(s) é mais simples, mas a H(s) resultante é mais complexa dificultando a sintonia PID. Uma terceira metodologia de desacoplamento é o desacoplador invertido que combina as boas caracterı́sticas dos dois métodos anteriores com D(s) similar ao desacoplador simplificado e H(s) tão simples como a do desacoplador ideal. Em todas essas metodologias e nas novas propostas, o cálculo do desacoplador não considera incertezas no modelo da planta. d1 C(s) u r1 r2 rm C1 (s) C2 (s) Cm (s) Desacoplador D(s) u 1 2 um dn é aplicada para designar a matriz de transferência G(s) = C(sI − A)−1 B + D. 2 Formulação do problema Considere o sistema linear invariante no tempo, P (s), descrito por ẋ(t) = z(t) = y(t) = Ax(t) + Bu u(t) + Bw w(t), Cz x(t) + Dzu u(t) + Dzw w(t), Cy x(t) + Dyw w(t), (4) sendo x(t) ∈ Rn o vetor de variáveis de estado, u(t) ∈ Rm o vetor de sinais de variáveis manipuladas, w(t) ∈ R2m+nd o vetor de entradas exógenas (sinais de referência, r(t) ∈ Rm , distúrbios, d(t) ∈ Rnd , e ruı́dos de medição, n(t) ∈ Rm ), z(t) ∈ Rm o vetor de variáveis controladas (saı́das da planta, c(t) ∈ Rm ), e y(t) ∈ R2m o vetor de variáveis medidas que são as entradas do controlador PID multimalhas (sinais de referência e saı́das da planta com ruı́dos de medição). Para simplificar a notação, as matrizes da Eq. (4) são organizadas em uma única matriz: Bw A Bu (5) P , Cz Dzu Dzw , 0 Dyw Cy d n1 c1 + + n2 c2 Sistema + multivariável + P(s) nm cm + + Figura 1: Controle desacoplador. A contribuição desse trabalho é apresentar um procedimento de sı́ntese de controle robusto desacoplador que busca desacoplar as malhas de controle de sistemas lineares invariantes no tempo incertos, assegurando o desempenho da resposta de rastreamento e da rejeição de distúrbios. Neste trabalho, o procedimento de sintonia PID apresentado em Gonçalves et al. (2008) é estendido para que pode possuir parâmetros incertos que pertencem a um conjunto compacto convexo, ou politopo, definido por seus vértices: ( ) N X P(α) , P : P = αi Pi ; α ∈ Ω , (6) i=1 3398 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Ω, ( α : αi ≥ 0, N X ) αi = 1 , transitória de rastreamento (sobresinal, tempo de acomodação etc.) para cada saı́da controlada. O erro de aproximação entre o modelo de referência e a matriz transferência de malha-fechada, E(s) , Tm (s)−Tcr (s), pode ser representado pelo seguinte modelo no espaço de estados: Bm Am 0 . Acr Bcr E(s) = 0 (15) Cm −Ccr Dm − Dcr (7) i=1 sendo Pi , i = 1, . . . , N ′ , os vértices do politopo e α = α1 . . . αN o vetor que parametriza o politopo. O politopo pode ser tratado como um simplex no espaço de dimensão N − 1. A dependência das matrizes do sistema com α será omitida. O controlador PID multimalhas pode ser representado por Ac Bc (8) C(s) , Cc Dc Seja Tcd (s) a matriz de transferência de malha-fechada relacionando as saı́das da planta e as perturbações, um bloco de Tzw (s). Este trabalho irá considerar um problema de controle desacoplador robusto que pode ser formulado como: dado um sistema com incerteza politópica, linear e invariante no tempo, P(α), α ∈ Ω, e um modelo de referência, Tm (s), encontrar o controlador desacoplador robusto, K(s) = D(s)C(s), que minimiza o valor máximo da norma H∞ do erro de aproximação, E(s), e minimiza a norma H∞ da matriz de transferência relacionada com a rejeição de distúrbios: e o pré-compensator, ou desacoplador, representado por Ad Bd . (9) D(s) , Cd Dd O controle por realimentação dinâmica de saı́da, U (s) = K(s)Y (s), é o produto desses dois blocos, K(s) = D(s)C(s): Ad Bd Cc Bd Dc Ak Bk Ac Bc . = 0 K(s) , Ck Dk Cd Dd Cc Dd Dc (10) A matriz de transferência de malha-fechada relacionando as variáveis controladas, z(t), e as entradas exógenas, w(t), Af Bf , (11) Tzw (s) , Cf Df pode ser calculada como A + Bu Dk Cy Bu Ck Af = , Bk Cy Ak Bw + Bu Dk Dyw Bf = , Bk Dyw Cf = Cz + Dzu Dk Cy Dzu Ck , Df = Dzw + Dzu Dk Dyw . ∗ K (s) = arg min K(s) Tcr (s) , Acr Ccr Bcr Dcr , max kE(s, α, K)k∞ α∈Ω max kTcd(s, α, K)k∞ # , α∈Ω sujeito a: K(s) ∈ F, (16) sendo F o conjunto de controladores desacopladores, com uma estrutura especificada, que resulta em sistemas em malha-fechada robustamente estáveis. Dois problemas de otimização escalar serão considerados neste trabalho. O primeiro é o cálculo de um controle desacoplador robusto subótimo: ∗ Km (s) = arg min max kE(s, α, K)k∞ , K(s) α∈Ω (12) (17) sujeito a: K(s) ∈ F. O segundo problema de otimização escalar é o cálculo de um controle para rejeição de distúrbios, que garante um erro de aproximação especificado: Seja " K ∗ (s) = arg min max kTcd (s, α, K)k∞ , (13) K(s) α∈Ω sujeito a: max kE(s, α, K)k∞ ≤ ǫm , a matriz de transferência de malha fechada relacionando os sinais de referência e as saı́das da planta, um dos blocos de Tzw (s). Defina Am Bm (14) Tm (s) , Cm Dm (18) α∈Ω K(s) ∈ F, ∗ sendo ǫm > maxα∈Ω kE(s, α, Km )k∞ . A idéia por trás da formulação do problema de controle desacoplador robusto proposto é simples. Com um modelo de referência diagonal, se o máximo erro de aproximação é pequeno, isso significa que os ganhos dos elementos fora da diagonal da matriz de transferência de malha fechada, Tcr (s), serão próximos de zero para todas as freqüências, levando a um desacoplamento satisfatório entre as malhas de controle. Além disso, como sendo o modelo de referência diagonal: Tm (s) = diag{Tm,i(s)}, i = 1, . . . , m. É necessário adotar o modelo de referência como uma matriz de transferência diagonal para forçar o desacoplamento do sistema. Cada elemento da diagonal, Tm,i (s), irá garantir as especificações de resposta 3399 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 os elementos da diagonal de Tcr (s) estarão próximos da resposta em freqüência especificada garantindo indiretamente as respostas transitórias de rastreamento desejadas. tes equações recursivas: χk+1 Qk+1 1 Qk m̃, d +1 = χk − = d2 d2 − 1 2 T Qk − Qk m̃m̃ Qk , d+1 (19) sendo 3 m̃ = mk / Procedimento proposto de sı́ntese de controlador desacoplador robusto q mTk Qk mk , (20) em que mk é a soma dos gradientes normalizados das funções de restrição violadas, gi (χ) > 0, quando χk não é uma solução viável, ou o gradiente da função objetivo, f (χ), quando χk é uma solução viável. Os gradientes são calculados numericamente por meio do método das diferenças finitas. Seja ei a i-ésima coluna da matriz identidade de dimensão d, e δ um escalar tal que δ > 0 e δ → 0 (tı́picos valores na faixa entre 10−8 e 10−3 ). Cada elemento do vetor gradiente, ▽f (χ), pode ser calculado como: O procedimento proposto para tratar os problemas de otimização não-convexo (17) e (18) diretamente no espaço de parâmetros do controlador desacoplador é baseado em duas etapas: sı́ntese e análise. No passo de sı́ntese é aplicado um algoritmo de otimização não-linear para resolver os problemas de otimização (17) ou (18) com o conjunto infinito Ω substituı́do por um conjunto finito de pontos Ω̃ ⊂ Ω. Este conjunto finito é, inicialmente, o conjunto de vértices do politopo como considerado em formulações convexas. Uma vez que não existe garantia de convexidade, não é suficiente considerar apenas os vértices do politopo a fim de garantir a estabilidade robusta do sistema de malha-fechada e a minimização de kEk∞ para todo α ∈ Ω no problema (17), ou a minimização de kTcdk∞ garantindo kEk∞ ≤ ǫm para todo α ∈ Ω no problema (18). Para verificar o controlador desacoplador calculado no primeiro passo para todo α ∈ Ω, um procedimento de análise com base em uma combinação de um algoritmo branch-andbound e formulações LMI (Gonçalves et al., 2007) é aplicado no segundo passo. Se o procedimento de análise encontrar um sistema instável no domı́nio de incerteza ou se for verificado que os valores máximos das funções objetivo ou de restrição não ocorrem em um ponto pertencente a Ω̃, então estes pontos são incluı́dos no conjunto Ω̃ e é necessário executar os dois passos do procedimento novamente. O procedimento termina quando se verifica que o sistema de malha fechada é robustamente estável e os valores máximos das funções objetivo e de restrição ocorrem em pontos que pertencem a Ω̃ (ou que estão próximos a pontos desse conjunto, de acordo com a precisão especificada). vi = f (χ + δei ) − f (χ) , i = 1, . . . , d. δ (21) Na etapa de análise, é necessário encontrar os α ∈ Ω correspondentes aos máximos das funções objetivo e restrição em (17) ou (18), ou encontrar um α ∈ Ω que corresponde a um sistema instável. A estratégia básica do algoritmo branch-and-bound é particionar o domı́nio de incerteza, Ω, tais que as funções limitantes inferior e superior convirjam para a valor máximo da norma em Ω. Este algoritmo termina quando a diferença entre as funções limitantes é menor do que a precisão desejada. O algoritmo é implementado considerando-se como função limite inferior a norma H∞ calculada nos vértices e como função limite superior o custo garantido H∞ calculado por meio de formulações LMI (Gonçalves et al., 2007). Se o sistema não é robustamente estável, o algoritmo localiza um sistema instável no politopo durante o cálculo do valor máximo de norma. O custo garantido H∞ é calculado com base no Lema 1 apresentado em de Oliveira et al. (2004). A técnica de partição com base em malhas simpliciais (Gonçalves, Palhares, Takahashi and Mesquita, 2006) é aplicada para permitir que este processo seja aplicado aos modelos politópicos com maior eficiência. Por exemplo, considere um politopo definido por N = 4 vértices, {P1 , P2 , P3 , P4 }, tratado como um simplex no espaço 3D (α4 = 1−α1 −α2 −α2 ). A subdivisão simplicial calcula novos vértices, {P5 , . . . , P10 }, sobre os pontos médios de todas as arestas, e a técnica de subdivisão gera a lista de vértices que compõem os novos 23 simplexos como mostrado na Fig. 2. Cada linha da tabela apresentada na Fig. 2 lista os ı́ndices dos pontos que correspondem aos vértices de um novo simplex. O primeiro simplex é definido pelos vértices {P1 , P5 , P6 , P7 }, o segundo No passo de sı́ntese, o problema de otimização escalar pode ser resolvido por meio do algoritmo cone-elipsoidal (Takahashi et al., 2003). Seja χ ∈ Rd o vetor de parâmetros de otimização (neste caso, os parâmetros dos controladores PID e do desacoplador), f (χ) : Rd → R a função objetivo a ser minimizada e gi (χ) : Rd → R, i = 1, . . . , s, o conjunto de funções de restrição. Seja χk o centro do elipsóide e Qk = QTk ≻ 0 a matriz que determina as direções e dimensões dos eixos do elipsóide. Dados os valores iniciais χ0 e Q0 , o algoritmo elipsoidal é descrito pelas seguin- 3400 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 por {P5 , P2 , P8 , P9 } e assim por diante. A implementação desse algoritmo está disponı́vel para download (Gonçalves et al., 2014). Na maioria dos casos, o valor máximo das funções objetivo e restrição ocorrem em um vértice do politopo e o procedimento proposto exige apenas uma iteração. Um exemplo de um problema que requer mais de uma iteração do procedimento proposto é apresentado em Gonçalves, Palhares and Takahashi (2006). α3 1 P3 P6 P10 P8 P7 P4 1 5 5 6 5 6 6 7 α2 5 6 7 2 8 9 6 8 9 8 3 10 6 7 9 8 9 10 7 9 10 9 10 4 1 G(s) Gd (s) = A Cz Bu B2 02×3 (24) . Considerando w = [r1 r2 d]T , sendo d o distúrbio (fluxo de alimentação), z = [c1 c2 ]T , sendo c1 e c2 as composições de topo e fundo, respectivamente e y = [r1 r2 c1 c2 ]T , as entradas do controlador desacoplador. As demais matrizes do modelo dinâmico são definidas como Bw = [0n×2 B2 ]T , Dzu = 02×2 , Dzw = 02×3 , P1 P9 P2 Os parâmetros γ1 ∈ [0.9, 1.1] e γ2 ∈ [0.9, 1.1] foram incluı́dos para representar as incertezas nas constantes de tempo das funções de transferência na diagonal. O domı́nio de incerteza corresponde a um politopo com quatro vértices. Foi considerada uma realização no espaço de estados de 24a ordem considerando aproximações de Padé de 3a ordem dos atrasos: α1 Cy = P5 02×n Cz , Dyw = I2 02×2 02×1 02×1 (25) 1 Água de resfriamento Figura 2: Subdivisão orientada pelas arestas de um simplex 3D. LC 4 Refluxo u1 Exemplo Ilustrativo A Fig. 3 apresenta uma coluna de destilação binária em escala piloto aplicada para separar um mistura de metanol-água (Wood and Berry, 1973). O refluxo e fluxo de vapor são as variáveis manipuladas e as composições do topo e da base são as variáveis controladas. Este processo tem sido amplamente considerado para estudo de estratégias de controle PID multimalhas e controle desacoplador (Åström et al., 2002; Zhang et al., 2002; Huang et al., 2003; Lee and Edgar, 2006; Campestrini et al., 2009; Shen et al., 2010; Vu and Lee, 2010a; Vu and Lee, 2010b; Kumar et al., 2012). Em Wood and Berry (1973), é apresentado um modelo dinâmico simplificado desse processo, considerando variações em torno de um ponto de operação: −18.9e−3s 12.8e−1s γ 16.7s + 1 21.0s + 1 1 G(s) = , (22) 6.6e−7s −19.4e−3s c1 Produto do topo Alimentação d CC u2 LC Vapor CC c2 Produto da base Figura 3: Diagrama esquemático do sistema de controle da coluna binária de Wood e Berry. Foi considerada a aproximação de Padé de 3a ordem dos atrasos para que os resultados das simulações do sistema com os atrasos ou com suas aproximações fossem simulares. Considere o controlador I-P (ação proporcional somente na realimentação): 10.9s + 1 γ2 14.4s + 1 3.8e−8s 14.9s + 1 , (23) Gd (s) = 4.9e−3s 13.2s + 1 sendo Gd (s) a matriz de transferência relacionando as saı́das da planta e a entrada de distúrbio. 0 0 0 0 K= Kp1 0 0 Kp2 1/Ti1 0 0 0 0 1/Ti2 0 0 −1/Ti1 0 −Kp1 0 0 −1/Ti2 , 0 −Kp2 (26) defininindo χ1 = kp,1 , χ2 = Ti,1 , χ3 = kp,2 e χ4 = 3401 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 melhor rejeição de distúrbios, além do fato de que é garantida a estabilidade para todos os sistemas que pertencem ao domı́nio de incerteza. Ti,2 , e o desacoplador com a seguinte estrutura: Ad = BdT = Cd = 0 χ5 0 0 0 0 0 0 0 0 χ13 0 1 χ6 0 0 0 0 0 0 1 0 0 0 0 χ7 0 0 0 0 0 0 χ14 0 0 1 χ15 0 0 0 1 χ8 0 0 0 0 0 0 0 0 0 0 0 χ9 0 0 1 0 χ16 0 0 0 0 0 0 0 0 0 1 0 χ10 0 0 0 0 χ11 0 0 , 0 1 0 χ17 0 χ18 0 0 0 0 0 0 1 χ12 0 χ19 , 2.5 2 Saídas da planta 0 . χ20 (27) A escolha pela configuração I-P, ao invés da tradicional configuração PI, se deve ao fato de que tal estrutura tem resultado em melhor desacoplamento de sistemas multivariáveis em algumas situações (Åström et al., 2002). Resolvendo o problema de otimização (17) considerando os elementos do modelo de referência: 2 ωn,i (−τi /2s + 1) Tm,i (s) = 2 (τi /2s + 1)(s2 + 2ζi ωn,i s + ωn,i ) (28) −52.889(s + 0.194) , (s + 827.9)(s + 0.1107) D2,1 (s) = −14.502(s − 0.7384) , (s + 576.8)(s + 0.1036) D2,2 (s) = −8.8366(s + 1.566) . (s2 + 14.85s + 188.8) 150 200 250 300 Tempo (min) 350 400 450 Entradas da planta 0.4 0.3 0.2 u 1 0.1 u 1 u 2 0 u Com base neste segundo modelo de referência, é obtido maxα∈Ω kEk∞ ≤ 0.1142 para kp,1 = 1.4410, Ti,1 = 10.3930, kp,2 = 1.2134, Ti,2 = 5.0961, e o desacoplador com as seguintes funções de transferência: = 100 0.5 −0.011(s − 1.6)(s + − 2.2s + 1.95) Tm,2 (s) = . (s + 0.12)(s + 0.060)(s2 + 0.94s + 0.24) (29) D1,2 (s) 50 Figura 4: Respostas transitórias de rastreamento para o controle desacoplador proposto (linha cheia) e o resultado em Shen et al. (2012) (linha tracejada). 0.049)(s2 73.171(s + 0.3292) , (s + 633.7)(s + 0.07461) 0.5 −0.5 0 0.0065(s2 + 0.47s + 0.22)(s2 − 2.7s + 2.7) , Tm,1 (s) = (s2 + 0.23s + 0.020)(s2 + 0.31s + 0.19) = 1 0 com τ1 = 1, ωn,1 = 0.2, ζ1 = 0.9, τ2 = 3, ωn,2 = 0.3 e ζ2 = 0.9, é obtido um desempenho satisfatório de controle com maxα∈Ω kEk∞ ≤ 0.1327. O modelo de referência é aperfeiçoado com base no modelo reduzido da aproximação dos elementos da diagonal de Tcr (s) resultante: D1,1 (s) 1.5 2 −0.1 −0.2 0 50 100 150 200 250 300 Tempo (min) 350 400 450 Figura 5: Respostas transitórias dos sinais de controle para o controle desacoplador proposto (linha cheia) e o resultado em Shen et al. (2012) (linha tracejada). (30) Para melhorar a rejeição de distúrbios, considerando ǫm = 0.25 no problema de otimização (18), é obtido kp,1 = 2.0959, Ti,1 = 9.4305, kp,2 = 3.0186, Ti,2 = 11.1035, e as seguintes funções de transferência do desacoplador: O controle desacoplador obtido com o procedimento proposto é comparado com o controle PI desacoplador apresentado em Shen et al. (2012). As respostas transitórias obtidas são apresentadas nas Fig. 4 e 5 para sinais de referência tipo degrau unitário, r1 (t) = 1(t), r2 (t) = 1(t − 150), e um sinal de distúrbio tipo pulso, d(t) = 0,5 × 1(t − 300) − 0,5 × 1(t − 375). A vantagem do procedimento proposto é o de obter a resposta transitória desejada, com o esforço de controle menor e uma 3402 D1,1 (s) = 14.202(s + 2.419) , (s2 + 16.1s + 144) D1,2 (s) = −22.684(s − 0.5753) , (s + 227.1)(s + 0.5036) D2,1 (s) = −14.502(s − 0.7384) , (s + 576.8)(s + 0.1036) D2,2 (s) = −31.549(s + 0.5616) . (s2 + 8.33s + 275.4) (31) Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Este controle desacoplador melhora a rejeição ao distúrbio sacrificando um pouco o desacoplamento do sistema. Fica a critério do projetista escolher a melhor opção. 5 Garrido, J., Vaı̀zquez, F., and Morilla, F. (2013). Industrial & engineering chemistry research, Centralized Inverted Decoupling Control 52(23): 7854–7866. Gonçalves, B. M., Gonçalves, E. N., Palhares, R. M. and Takahashi, R. H. C. (2012). Robust decoupling PI controllers for multi-loop control, Proceedings of the 51st IEEE Conference on Decision and Control, IEEE, Maui, Hawaii, USA, pp. 1530–1535. Conclusões Foi proposto um novo procedimento de sı́ntese de controle desacoplador robusto para sistemas lineares com incerteza politópica. Os objetivos de controle são o desacoplamento entre malhas de controle, o desempenho de resposta de rastreamento e rejeição de distúrbios. Verificou-se que a estratégia de aproximação de modelo de referência pode garantir tanto um desacoplamento satisfatório bem como o desempenho da resposta de rastreamento. O procedimento proposto foi aplicado a um sistema multivariável bastante estudado na literatura. As vantagens do procedimento de sı́ntese proposto são: (i) considerar sistemas incertos, (ii) considerar o desempenho de rastreamento e rejeição de distúrbios e (iii) calcular simultaneamente os controladores PID multimalhas e o desacoplador causal e estável com a estrutura desejada. Gonçalves, E. N., Bachur, W. E. G., Palhares, R. M. and Takahashi, R. H. C. (2011). Robust H2 /H∞ /reference model dynamic output-feedback control synthesis, International Journal of Control 84(12): 2067–2080. Gonçalves, E. N., Palhares, R. M. and Takahashi, R. H. C. (2006). H2 /H∞ filter design for systems with polytope-bounded uncertainty, IEEE Transactions on Signal Processing 54(9): 3620–3626. Gonçalves, E. N., Palhares, R. M. and Takahashi, R. H. C. (2008). A novel approach for H2 /H∞ robust PID synthesis for uncertain systems, Journal of Process Control 18(1): 19–26. Agradecimentos Os autores agradecem os apoios das agências CAPES, CNPq e FAPEMIG e aos comentários construtivos dos revisores que foram úteis no aprimoramento desse trabalho. Gonçalves, E. N., Palhares, R. M., Takahashi, R. H. C. and Mesquita, R. C. (2006). Algorithm 860: SimpleS - an extension of Freudenthal’s simplex subdivision, ACM Transactions on Mathematical Software 32(4): 609–621. Referências Åström, K., K.H.Johansson and Wang, Q.-G. (2002). Design of decoupled PI controllers for two-by-two systems, IEE Proceedings on Control Theory and Applications 149(1): 74– 81. Gonçalves, E. N., Palhares, R. M., Takahashi, R. H. C. and Mesquita, R. C. (2007). H2 and H2 ε-guaranteed cost computation of uncertain linear systems, IET Control Theory and Applications 1(1): 201–209. Campestrini, L., Filho, L. C. S. and Bazanella, A. S. (2009). Tuning of multivariable decentralized controllers through the ultimatepoint method, IEEE Transactions on Control Systems Technology 17(6): 1270–1281. Gonçalves, E. N., Palhares, R. M., Takahashi, R. H. C. and Mesquita, R. C. (2014). H2 and H2 ε-guaranteed cost computation of uncertain linear systems, MATLAB Central - File exchange. http://www.mathworks.com/matlabcentral/ fileexchange/46646-h2hinf-cost-computatiozip. de Oliveira, P. J., Oliveira, R. C. L. F., Leite, V. J. S., Montagner, V. F. and Peres, P. L. D. (2004). H∞ guaranteed cost computation by means of parameter-dependent Lyapunov functions, Automatica 40: 1053–1061. Huang, H.-P., Jeng, J.-C., Chiang, C.-H. and Pan, W. (2003). A direct method for multi-loop PI/PID controller design, Journal of Process Control 12: 769–786. Dittmar, R., Gill, S., Singh, H. and Darby, M. (2012). Robust optimization-based multiloop PID controller tuning: A new tool and its industrial application, Control Engineering Practice 20(4): 355–370. Kumar, V. V., Rao, V. S. R. and Chidambaram, M. (2012). Centralized PI controllers for interacting multivariable processes by synthesis method, ISA Transactions 51(3): 400–409. Gagnon, E., Pomerleau, A. and Desbiens, A. (1998). Simplified, ideal or inverted decoupling?, ISA Transactions 37(4): 265–276. 3403 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Lee, J. and Edgar, T. F. (2006). Multiloop PI/PID control system improvement via adjusting the dominant pole or the peak amplitude ratio, Chemical Engineering Science 61(5): 1658–1666. Pradhan, J. K. and Ghosh, A. (2013). Design and implementation of decoupled compensation for a twin rotor multiple-input and multipleoutput system, IET Control Theory and Applications 7(2): 282–289. Rajapandiyan, C. and Chidambaram, M. (2012). Controller design for MIMO processes based on simple decoupled equivalent transfer functions and simplified decoupler, Industrial & Engineering Chemistry Research 51(38): 12398–12410. Shen, Y., Cai, W.-J. and Li, S. (2010). Multivariable process control: Decentralized, decoupling, or sparse?, Industrial & Engineering Chemistry Research 49(2): 761–771. Shen, Y., Sun, Y. and Li, S. (2012). Adjoint transfer matrix based decoupling control for multivariable processes, Industrial & Engineering Chemistry Research 51(50): 16419–16426. Takahashi, R. H. C., Saldanha, R. R., DiasFilho, W. and Ramı́rez, J. A. (2003). A new constrained ellipsoidal algorithm for nonlinear optimization with equality constraints, IEEE Transactions on Magnetics 39(3): 1289–1292. Vu, T. N. L. and Lee, M. (2010a). Independent design of multi-loop PI/PID controllers for interacting multivariable processes, Journal of Process Control 20(8): 922–933. Vu, T. N. L. and Lee, M. (2010b). Multi-loop PI controller design based on the direct synthesis for interacting, ISA Transactions 49: 79– 86. Vu, T. N. L. and Lee, M. (2013). An extended method of simplified decoupling for multivariable processes with multiple time delays, Journal of Chemical Engineering of Japan 46(4): 279–293. Wood, R. K. and Berry, M. W. (1973). Terminal composition control of a binary distillation column, Chemical Engineering Science 28: 1707–1212. Zhang, Y., Wang, Q.-G. and Åström, K. (2002). Dominant pole placement for multi-loop control systems, Automatica 38(7): 1213–1220. 3404
Download