UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
ESCOLA DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
MÁRCIO LUÍS OLEKSINSKI
PROJETO DE DIPLOMAÇÃO
ENSAIO DE MÁQUINAS DE INDUÇÃO
Porto Alegre
2009
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
ESCOLA DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
ENSAIO DE MÁQUINAS DE INDUÇÃO
Projeto de Diplomação apresentado ao
Departamento de Engenharia Elétrica da Universidade
Federal do Rio Grande do Sul, como parte dos
requisitos para Graduação em Engenharia Elétrica.
ORIENTADOR: Ály Ferreira Flores Filho
Porto Alegre
2009
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
ESCOLA DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
MÁRCIO LUÍS OLEKSINSKI
ENSAIO DE MÁQUINAS DE INDUÇÃO
Este projeto foi julgado adequado para fazer jus aos
créditos da Disciplina de “Projeto de Diplomação”, do
Departamento de Engenharia Elétrica e aprovado em
sua forma final pelo Orientador e pela Banca
Examinadora.
Orientador: _____________________________________
Prof. Ály Ferreira Flores Filho, UFRGS
Doutor pela University of Wales College of Cardiff, País de
Gales, Reino Unido
Co-Orientador:
Carlos Sonier Cardoso do Nascimento, UFSM
Mestrado em andamento pela UFRGS, Porto Alegre, Brasil
Banca Examinadora:
Prof. Luiz Tiarajú dos Reis Loureiro, UFRGS
Doutor pela UFRGS, Porto Alegre, Brasil
Prof. Roberto Petry Homrich, UFRGS
Doutor pela Universidade Estadual de Campinas, UNICAMP, Brasil.
Porto Alegre, dezembro de 2009.
DEDICATÓRIA
Dedico este trabalho aos meus pais, em especial pela dedicação e apoio em todos os
momentos difíceis.
AGRADECIMENTOS
Aos pais Mário Valdir Oleksinski e Márcia Maria Oleksinski, pela oportunidade de
obtenção de uma ótima formação.
Aos irmãos Diogo Renato, futuro estudante de Engenharia Elétrica dessa
Universidade, e Danilo Paulo Oleksinski, fonte de inspiração e motivação constante.
Aos colegas e amigos Henrique Sauer, Marco Auad e Carlos Nascimento pelo apoio e
ajuda na realização desse trabalho.
À Priscila Padilha pela força ao longo desses cinco anos de caminhada.
Ao Brasil, por fornecer ensino de qualidade através das universidades federais.
À Universidade, professores, funcionários,
RESUMO
Estudo de metodologia para obtenção de modelo elétrico de máquinas de indução baseada em
procedimentos de ensaio normalizados, empregando medidor trifásico multifunção, sistema
de medição de resistência a quatro fios e software desenvolvido para aquisição e tratamento
dos dados de ensaio.
Palavras-chaves: Engenharia Elétrica. Procedimento de Ensaio. Máquinas de Indução.
Aquisição de Dados. Modelo Elétrico.
ABSTRACT
Study methodology for obtaining electric model of induction machines based on standardized
testing procedures, using three-phase multifunction meter, measurement system for resistance
to four wires and software developed for acquisition and processing of test data.
KEYWORDS: Electrical Engineering. Test Procedure. Induction Machinery. Data
Acquisition. Electrical Model.
SUMÁRIO
1.
1.1.
2.
2.1.
2.2.
2.3.
2.4.
2.4.1.
2.4.2.
2.5.
2.6.
3.
3.1.
3.1.1.
3.1.1.1.
3.1.2.
3.1.2.1.
3.1.2.2.
3.1.3.
3.2.
3.2.1.
3.2.1.1.
3.2.1.2.
3.2.1.3.
3.2.1.4.
3.3.
3.4.
3.5.
3.5.1.
4.
4.1.
4.2.
4.3.
4.4.
4.4.1.
4.4.2.
4.5.
5.
5.1.
5.2.
6.
6.1.
6.2.
6.3.
6.4.
6.5.
6.6.
6.6.1.
6.6.2.
INTRODUÇÃO .................................................................................................. 18
Objetivos .............................................................................................................. 20
MÁQUINAS DE INDUÇÃO ............................................................................. 23
Princípio de funcionamento ............................................................................... 24
Escorregamento .................................................................................................. 26
Conjugado e Escorregamento ........................................................................... 27
Modelando uma Máquina de Indução .............................................................. 29
O Modelo Elétrico ................................................................................................... 30
Modelo do Rotor ..................................................................................................... 31
Análise do circuito equivalente.......................................................................... 34
Conjugado e potência através do equivalente Thevenin ................................. 38
ENSAIO E NORMALIZAÇÃO ........................................................................ 42
Medição da Resistência ...................................................................................... 43
Método da ponte ..................................................................................................... 44
Ponte de Wheatstone .............................................................................................. 44
Procedimento de medição ...................................................................................... 45
Correção da Temperatura ..................................................................................... 46
Obtenção dos valores de resistência ...................................................................... 46
Resultado das medições .......................................................................................... 47
Ensaio a Vazio ..................................................................................................... 47
Tipos de perdas ................................................................................................... 49
Perda I²R no Estator .............................................................................................. 49
Perda I²R no Rotor ................................................................................................. 49
Perda no núcleo, atrito e ventilação ...................................................................... 50
Perda por atrito e ventilação ................................................................................. 50
Ensaio com rotor bloqueado .............................................................................. 51
Ensaio à Velocidade Síncrona ........................................................................... 53
Obtenção dos parâmetros elétricos ................................................................... 54
Instrumentos e equipamentos ................................................................................ 57
AUTOMAÇÃO COM MEDIDOR MULTIFUNÇÃO .................................... 59
Desempenho básico ............................................................................................. 59
Princípio de funcionamento ............................................................................... 60
Princípios de cálculos ......................................................................................... 61
Ensaio de verificação de algoritmo ................................................................... 62
Procedimentos de ensaio ........................................................................................ 64
Resultados ............................................................................................................... 64
Conclusões ........................................................................................................... 66
AUTOMAÇÃO DO PROCESSO COM LABVIEW ...................................... 67
Plataforma LabVIEW ........................................................................................ 68
Virtual Instrument Desenvolvido ...................................................................... 71
PROCEDIMENTOS REALIZADOS PARA VALIDAÇÃO ......................... 75
Ensaio de máquina de indução trifásica ........................................................... 75
Ensaio a vazio ...................................................................................................... 75
Ensaio de rotor bloqueado ................................................................................. 77
Medição de resistência ôhmica .......................................................................... 78
Ensaio de velocidade síncrona ........................................................................... 79
Utilização dos procedimentos normalizados de cálculos................................. 81
Perdas Suplementares ............................................................................................ 82
Ensaio com o Rotor bloqueado .............................................................................. 82
6.6.3.
Metodologia e Formulário número 5 da NBR 5383 ............................................ 82
7.
RESULTADOS ALCANÇADOS ...................................................................... 83
7.1.
Resultados do ensaio de máquina de indução .................................................. 83
7.2.
Modelo Elétrico ........................................................................................................... 85
7.3.
Planilhas com valores calculados .............................................................................. 86
7.4.
Gráficos típicos ........................................................................................................... 87
7.5.
Resultados comparativos com normas ............................................................. 87
CONCLUSÃO......................................................................................................................... 89
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 92
ANEXOS.... ............................................................................................................................. 94
LISTA DE ILUSTRAÇÕES
FIGURA 1 - MÁQUINA SIMÉTRICA COM DOIS PÓLOS E TRÊS FASES (FITZGERALD, 2006) ......................................... 25
FIGURA 2 - CURVA CARACTERÍSTICA CONJUGADO VERSUS VELOCIDADE (FITZGERALD, 2006) ......................... 29
FIGURA 3 – CIRCUITO EQUIVALENTE MONOFÁSICO DO ESTATOR DE UM MOTOR DE INDUÇÃO POLIFÁSICO
(FITZGERALD, 2006) ..................................................................................................................................... 30
FIGURA 4 – CIRCUITO EQUIVALENTE MONOFÁSICO DO ROTOR DE UM MOTOR DE INDUÇÃO POLIFÁSICO
(FITZGERALD, 2006) ..................................................................................................................................... 33
FIGURA 5 – MODELO MONOFÁSICO DE UM MOTOR DE INDUÇÃO POLIFÁSICO (FITZGERALD, 2006) .................... 34
FIGURA 6 – CIRCUITO ELÉTRICO DE MOTOR DE INDUÇÃO, COM RESISTOR EQUIVALENTE À POTÊNCIA MECÂNICA
(FITZGERALD, 2006) ..................................................................................................................... 39
FIGURA 7 – CIRCUITO EM PONTE (ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS, 2002) ................. 45
FIGURA 8 – DETERMINAÇÃO DA PERDA POR ATRITO E VENTILAÇÃO (ASSOCIAÇÃO BRASILEIRA DE
NORMAS TÉCNICAS, 2002) ..................................................................................................................... 50
FIGURA 9 – ENSAIO À VELOCIDADE SÍNCRONA ....................................................................................................... 53
FIGURA 10 – WT1030M DA YOKOGAWA (YOKOGAWA, 1996) .......................................................................... 59
FIGURA 11 – DIAGRAMA DE BLOCOS DO MEDIDOR DE POTÊNCIA DIGITAL DA SÉRIE WT1000 (IWASE, 1997) ...... 61
FIGURA 12 – CIRCUITO ELÉTRICO UTILIZADO PARA MEDIÇÃO, LIGADO EM ESTRELA ATERRADA ........................... 63
FIGURA 13 – HIERARQUIA DO SOFTWARE DESENVOLVIDO EM LABVIEW.............................................................. 72
FIGURA 14 – FRONT PANEL DE MAIN.VI ............................................................................................................... 74
FIGURA 15 – DADOS DE PLACA DE MOTOR DE INDUÇÃO TRIFÁSICO ....................................................................... 75
FIGURA 16 – CIRCUITO MONTADO PARA O ENSAIO A VAZIO COM VALORES IMPORTANTES..................................... 76
FIGURA 17 – CIRCUITO MONTADO PARA O ENSAIO DE ROTOR BLOQUEADO ............................................................ 77
FIGURA 18 – CIRCUITO MONTADO PARA O ENSAIO DE VELOCIDADE....................................................................... 80
FIGURA 19 – CIRCUITO EQUIVALENTE DO ENSAIO DE VELOCIDADE........................................................................ 80
FIGURA 20 – CIRCUITO EQUIVALENTE DO ENSAIO DE VELOCIDADE (SOFTWARE LABVIEW) ................................. 85
FIGURA 21 – CIRCUITO EQUIVALENTE DO ENSAIO DE VELOCIDADE (SOFTWARE LABVIEW) ................................. 86
FIGURA 22 – GRÁFICO DE CONJUGADO (N.M) VERSUS VELOCIDADE (RPM) .......................................................... 87
FIGURA 23 – GRÁFICO DE CONJUGADO (N.M) VERSUS ESCORREGAMENTO (SOFTWARE LABVIEW) ...................... 87
LISTA DE TABELAS
TABELA 1 - DISTRIBUIÇÃO EMPÍRICA DE REATÂNCIAS DE DISPERSÃO EM MOTORES DE INDUÇÃO (FITZGERALD,
1990) ............................................................................................................................................................ 55
TABELA 2 – RELAÇÃO DOS INSTRUMENTOS DE LABORATÓRIO UTILIZADOS NOS ENSAIOS A VAZIO E ROTOR
BLOQUEADO ................................................................................................................................................. 58
TABELA 3 – TABELA DE VALORES MEDIDOS PELO WT1030M E CÁLCULOS EFETUADOS ........................................ 64
TABELA 4 – VALORES MEDIDOS PELA FONTE DA HP 6814B................................................................................... 65
TABELA 5 – VALORES RESULTANTES DO ENSAIO A VAZIO..................................................................................... 77
TABELA 6 – VALORES MÉDIOS RESULTANTES DO ENSAIO DE ROTOR BLOQUEADO ................................................ 78
TABELA 7 – VALORES DE RESISTÊNCIA DO ESTATOR (BOBINA A BOBINA) .............................................................. 79
TABELA 8 – VALORES DE RESISTÊNCIA DO ESTATOR (BOBINA A BOBINA) CORRIGIDOS PARA 66°C........................ 79
TABELA 9 – VALORES MÉDIOS RESULTANTES DO ENSAIO DE VELOCIDADE SÍNCRONA .......................................... 81
TABELA 10 – VALORES MÉDIOS RESULTANTES DO ENSAIO DE VELOCIDADE SÍNCRONA ........................................ 88
LISTA DE ABREVIATURAS
ABNT - Associação Brasileira de Normas Técnicas
DELET - Departamento de Engenharia Elétrica
PPGEE - Programa de Pós-Graduação em Engenharia Elétrica
UFRGS - Universidade Federal do Rio Grande do Sul
LMEAE- Laboratório de Máquinas Elétricas, Acionamento e Energia
ABNT - Associação Brasileira de Normas Técnicas
AC – alternating current (corrente alternada)
PCH – Pequena Central Hidrelétrica
GLP – Gás Liquefeito de Petróleo
Ф – Campo magnético resultante, em - Velocidade síncrona do campo girante da máquina de indução, em - Escorregamento normalizado em relação à velocidade síncrona do estator
– Velocidade angular do campo magnético de estator, em
– Velocidade angular do rotor, em
- Frequência do rotor, em – Rotações por minuto
- Constante que aglutina a FMM do rotor proporcional à , em . – Corrente do rotor, em – Ângulo entre a onda de FMM do rotor e a onda de FMM do estator, em graus (°)
FMM – Força magnetomotriz, em FCEM – Força contra eletromotriz, em – Tensão de terminal do estator para o modelo elétrico monofásico, em – Corrente de carga equivalente vista do estator, com o mesmo número de espiras
por fase que o estator em relação ao rotor. Também é chamada de corrente de rotor,
em - Corrente de excitação, em " – Tensão aplicada sobre a impedância alimentada pela corrente de magnetização !
ou tensão produzida pela FCEM do estator, em # - Componente da corrente de excitação que representa a parcela de corrente que
produz as perdas no núcleo, em que representa a componente de
"
– Componente da corrente de excitação magnetização, em $# – Resistência que representa a parcela de perdas no núcleo, em Ω
& - Reatância de magnetização, em Ω
' – Impedância de dispersão equivalente vista dos terminais de estator de um
secundário equivalente estacionário, em Ω
'()( - Impedância de dispersão do rotor na frequência de escorregamento, em Ω
*+ - É a relação de espiras efetivas entre o enrolamento do estator e o enrolamento do
rotor real
$ - Resistência do rotor referido ao circuito de estator, em Ω
& - Reatância de dispersão do rotor refletido ao estator, em Ω
- - Ângulo entre a tensão e corrente de fase de entrada do estator, em °
./0 - Potência ativa trifásica absorvida por uma máquina de indução, em 1
+* - Tensão de fase, ou seja, entre uma fase e o neutro, em 1
+* - Corrente de fase, em 23- - Fator de potência de entrada do circuito monofásico equivalente sob excitação
puramente senoidal
– Velocidade real do rotor, em 4 - Eficiência da máquina de indução
∑ 678 – Somatório das perdas da máquina de indução, em .9: – Perdas rotacionais, perdas no ferro e perdas suplementares, em .;* - Perdas de ferro ou perdas de núcleo, em .#<, - Perdas no cobre ou efeito Joule totais do circuito do estator, em .#<, - Perdas no cobre ou efeito Joule totais do circuito do rotor, em >8
– Entreferro, entre estator e rotor, em - Corrente total de estator, em - Corrente total de rotor, em $ - Resistência associada às perdas Ôhmicas do circuito de estator, em Ω
$ - Resistência associada às perdas Ôhmicas do circuito de rotor, em Ω
+* – Número de fases da máquina de indução polifásica
.*?*)(@0é)/# - Potência eletromagnética total fornecida ao rotor através do
entreferro, em A*?*)(@0é)/#( - Conjugado eletromagnético total, em .*# - Potência mecânica desenvolvida pela máquina de indução, em .*#úBCD - Potência mecânica útil disponível no eixo da máquina de indução, em A*#úBCD –Conjugado útil disponível no eixo da máquina de indução, em 1
,*E – Fasor de tensão da fonte equivalente de Thevenin, vista dos terminas a e b, em
!"
- Tensão induzida pelo fluxo de entreferro resultante no rotor equivalente, em ',*E - Impedância equivalente quando vista dos terminais a e b, em Ω
$,*E - Parte real da impedância ',*E de Thevenin quando vista dos terminais a e b,
em Ω
&,*E - Parte complexa da impedância ',*E de Thevenin quando vista dos terminais a
e b, em Ω
$
FGH
– Resistência equivalente à potência mecânica, em Ω
$I – Resistência desconhecida na ponte de Wheatstone, em Ω
$ - Valor de resistência auxiliar da ponte de Wheatstone, em Ω
$J - Valor de resistência auxiliar da ponte de Wheatstone, em Ω
$) – Resistência do enrolamento obtida no ensaio, à temperatura K) , em Ω
K) - Temperatura do enrolamento por ocasião da medição da resistência, em °M
K - Temperatura especificada para correção da resistência, em °M
$ - Resistência de enrolamento, corrigida para uma temperatura especificada, K , em
Ω
N - Constante igual a 234,5 para cobre eletrolítico com 100% de condutividade ou 225
para alumínio com condutividade em volume de 62%, em °M
VPQRS,TU – Tensão eficaz de fase a vazio, dada em Volts, em IPQRS,TU – Corrente eficaz de fase a vazio, dada em Ampères (H
PTU - Potência trifásica a vazio, em .()#/(0? - Perdas rotacionais, em &:X – Reatância do ensaio a vazio, resultante da impedância equivalente da máquina
de indução a vazio, em Ω
Y:X - Potência reativa equivalente da máquina de indução a vazio, em 8
I - Corrente eficaz medida ou calculada por terminal de linha a uma carga
especificada, quando da definição de perdas de cobre do estator, em R - Resistência em c.c. entre quaisquer dois terminais de linha, quando da definição de
perdas de cobre do estator, em Ω
VPQRS,Z[ - Tensão eficaz de fase com rotor bloqueado, em V
I[\]^Q,Z[ – Corrente eficaz de fase com rotor bloqueado, em PZ[ - Potência trifásica com rotor bloqueado, em fZ[ – Frequência aplicada ao estator durante o ensaio com rotor bloqueado, em HP – Horse Power, unidade de potência que equivale a 746 Watts
&J? – Reatância equivalente obtida do ensaio com rotor bloqueado, em Ω
- Frequência nominal da máquina, em Hz
& - Reatância de dispersão do circuito equivalente de estator, em Ω
b – Relação entre as reatâncias, dado por
cd
ce
DC – Direct current (corrente contínua)
GPIB – General Purpose Interface Bus
DSP – Digital Signal Processor
A/D – Analógico/Digital
RMS – Root Mean Square
PF – Fator de potência
DEG – simplificação utilizada para degree, ou seja, ângulo, em ° ou em 87
VA – Unidade de potência aparente, também conhecida como Volt. Ampère
Var – Unidade de potência reativa
W – Unidade de potência ativa
VARIAC – Variable Voltage Transformers
VI – Virtual Instrument
LED – Light-Emitting Diode
LabVIEW – Laboratory Virtual Instrument Engineering Workbench
I/O – sigla que representa dispositivos de entra e saída, ou seja, Input/Output
Plug-and-Play – também conhecido por PnP, ou seja, Conecte e Use
USB – Universal Serial Bus
PCI- Peripheral Component Interconnect
Wi-Fi – tecnologia de interconexão entre dispositivos sem fios, usando o
protocolo IEEE 802.11
3D – Três dimensões
.í - Potência ativa de saída n-fásica de uma máquina de indução operando como
gerador, em 4()( - Rendimento de uma máquina de indução operando como motor
4@*( - Rendimento de uma máquina de indução operando como gerador
23- - Fator de potência da máquina de indução operando ou como motor ou como
gerador
.0ú#?*(F*))(H - Perda monofásica no núcleo do estator, em .: - Potência ativa monofásica medida no ensaio a velocidade síncrona, em +*,: - Corrente eficaz de linha monofásica medida no ensaio a velocidade síncrona,
em 18
1.
INTRODUÇÃO
Nas últimas décadas muitas pesquisas têm sido feitas sobre geração de energia
utilizando fontes alternativas. A geração de energia a partir de gás natural e do
aproveitamento de potencial eólico de certa região constitui exemplo de forma de geração de
energia elétrica a partir de recursos naturais, ditos ainda como alternativos ao próprio sistema
hidráulico, nuclear ou térmico.
Dentro desse universo de possibilidades e pesquisas têm-se a constante busca por
viabilidade econômica e baixo impacto ambiental. Contudo, não se pode falar nisso sem
entrarmos na questão de qual dispositivo eletromagnético será utilizado para a conversão de
energia mecânica em energia elétrica e, mais especificamente, dos custos que tal dispositivo
representará no sistema a ser implantado, avaliando questões de eficiência, consumo próprio
de energia reativa, perdas, rendimento em condições de operação e custo econômico de
aquisição.
Nesse contexto é que se justificam os estudos feitos com máquinas de indução, quando
da utilização destes dispositivos como geradores de energia elétrica, uma vez que podem
apresentar viabilidade econômica e resultados satisfatórios dos pontos de vista elétrico e
mecânico.
Estudos sobre as máquinas de indução como gerador surgiram nos anos 1930 como
pode ser visto em (WAGNER, 1939). Quando comparado com o gerador síncrono, utilizado
em centrais hidrelétricas, o gerador de indução possui várias e importantes vantagens, onde se
destaca o já citado custo reduzido. Como desvantagem, para fins limitantes, cita-se o baixo
fator de potência de geradores de indução. De acordo com o trabalho de (CHAPALLAZ,
1990), por exemplo, o gerador de indução pode ser uma opção viável técnico e
economicamente para potências de até 100 kVA, o que acaba por englobar um grande sistema
19
de geração de energia a partir de pequenas centrais hidroelétricas (PCH), centrais a gás
natural, à biomassa e eólicas, todas com um futuro promissor.
Devido à qualidade dessas pesquisas desenvolvidas, chega-se a resultados
interessantes sobre o assunto. Um exemplo é o fato do rendimento de uma máquina de
indução na função como gerador apresentar um rendimento muito próximo ao que apresenta
na função de motor, conforme um estudo sobre geração a partir de máquina de indução como
gerador (SANTOS, 2003), desenvolvido na UFRGS.
Apresentado todo esse potencial de estudos futuros a cerca de máquinas de indução e,
ainda, se tomando conhecimento da importância de se analisar a questão do rendimento
dessas máquinas, se chega à questão de como realizar tal avaliação quantitativa e qualitativa
do rendimento desses motores de indução de forma o mais exata quanto possível. Tal
questionamento nos conduz diretamente à resposta que consiste na obtenção do modelo
elétrico da máquina de indução para análise de comportamentos. Isso se justifica pelo fato de
que a Engenharia é uma ciência que apresenta resultados baseados em modelagem de
processos e sistemas em diversos campos de atuação.
Podemos também avaliar a importância de uma modelagem de máquinas de indução
com um modelo de qualidade, baseado em equacionamento e considerações decisórias ou
simplificadoras, no ambiente laboratorial de academias. Todo curso de Engenharia Elétrica
apresenta em sua base curricular cadeiras de máquinas elétricas e, em algum momento, surge
a necessidade de obtenção dos parâmetros elétricos durante aulas práticas de laboratório, com
o intuito de obtenção do modelo elétrico equivalente por fase de um motor de indução.
Porém, o que se percebe na maioria das universidades públicas, é a utilização de
equipamentos pouco exatos para as medições das grandezas durante os ensaios. Não se
consegue a garantia de simultaneidade das medições e muito menos medições sucessivas,
20
temporizadas e automáticas das mesmas. Isso acarreta erros sistemáticos que propagam pelo
processo de modelagem, o qual, por si só, já apresenta simplificações com erro agregado.
1.1.
Objetivos
O foco desse trabalho é justamente a obtenção do modelo elétrico de máquinas de
indução operando como motor para que este modelo seja utilizado na análise de viabilidade e
eficiência quando a máquina for utilizada como gerador de indução em pequenas centrais
elétricas, em geração com turbinas eólicas ou mesmo em sistemas de geração a gás, ou ainda
em outras aplicações.
No entanto, o trabalho desenvolvido propõe uma solução ao problema mencionado
anteriormente no que diz respeito às dificuldades encontradas durante os ensaios de máquinas
de indução em laboratórios, apresentando um sistema automatizado de obtenção de medidas
elétricas durante os ensaios, o qual garante simultaneidade na obtenção dos valores
mensurados, possibilidade de programação de intervalos entre medições a serem gravadas e
configurações do equipamento multifunção de alta precisão utilizado no processo (feito
totalmente via software) que simula o equipamento multimedidor de grandezas de forma
virtual. Como resultados, teremos a geração do modelo elétrico e gráfico de rendimento e
conjugado de uma máquina funcionando como gerador de indução (além de outras opções de
gráficos).
Esse trabalho parte do pressuposto de que modelar a máquina de indução com a qual
se quer trabalhar consiste no primeiro passo de qualquer estudo de qualidade. Para tanto,
alguns quesitos de normalização devem ser respeitados, bem como deve-se observar os
procedimentos de ensaios, geralmente presentes em normas específicas. E essa consiste uma
motivação inspiradora, pois o resultado a que se chega com o estudo desenvolvido nesse
trabalho é o “ponto de partida” para outros trabalhos sobre máquinas de indução. O trabalho a
21
seguir apresentará um sistema cujo principal objetivo se destina a simplificar o processo de
obtenção de modelos elétricos e fornecer modelos de alta qualidade técnica.
Sendo assim, o estudo foi desenvolvido em 8 partes, divididas como segue descrição e
nomes dos capítulos.
O primeiro capítulo é a INTRODUÇÃO. Nesse capítulo ficam claros os objetivos que
motivaram a elaboração e desenvolvimento do projeto. Uma breve introdução e motivações
foram apresentadas nesse capítulo.
A segunda parte é a chamada de MÁQUINAS DE INDUÇÃO. Esse capítulo realiza
uma revisão bibliográfica sobre os principais conceitos de máquinas de indução, uma revisão
sobre o equacionamento matemático das máquinas e aborda a questão do modelo elétrico
equivalente que deve ser obtido no processo de ensaio. Questões sobre equacionamento da
máquina quando em operação como gerador também são abordadas nesse capítulo.
A terceira parte fala sobre ENSAIO E NORMALIZAÇÃO. Esse capítulo apresenta
informações sobre procedimentos normalizados de ensaios e fala também sobre os diferentes
tipos de ensaios necessários para a obtenção do modelo elétrico equivalente da máquina
ensaiada. Os tipos de perdas fornecidas por cada um dos ensaios, ou melhor, os tipos de
perdas que podem ser associada a cada ensaio são também mostradas nesse capítulo.
A quarta parte mostra como foi feita a AUTOMAÇÃO COM MEDIDOR
MULTIFUNÇÃO. Esse capítulo nos mostra todas as principais características do principal
equipamento utilizado para os ensaios: WT1030M. A apresentação de suas características,
dos detalhes sobre o algoritmo de cálculo que o equipamento tem implementado em seu
hardware e do defeito que foi detectado nesse algoritmo (em conjunto com o ANEXO A) são
explicitados nesse capítulo.
A quinta parte chama-se AUTOMAÇÃO COM MEDIDOR MULTIFUNÇÃO. Esse
capítulo apresenta algumas características sobre a plataforma LabVIEW e descrições sobre
22
como tal plataforma está estruturada. Além disso, apresenta a descrição detalhada (em
conjunto como o ANEXO B) do software desenvolvido para a automação do processo de
ensaio de máquinas elétricas de indução.
A sexta parte do projeto é denominada PROCEDIMENTOS REALIZADOS PARA
VALIDAÇÃO.
Nessa parte são apresentados todos os procedimentos e montagens
executadas durante os ensaios. Estão descritas as ligações elétricas entre todos os
equipamentos, a listagem dos materiais utilizados nos ensaios e informações importantes para
cada um dos ensaios (a vazio, de rotor bloqueado, à velocidade síncrona e medição de
resistência).
A sétima parte apresenta os RESULTADOS. Uma apresentação dos resultados obtidos
com a conclusão e elaboração desse projeto será feita nessa parte do relatório. Gráficos,
tabelas e figuras fazem parte da exemplificação e apresentação dos resultados.
Por fim, tem-se a CONCLUSÃO, que apresenta sugestões para trabalhos futuros e as
conclusões retiradas do desenvolvimento do projeto em questão.
23
2.
MÁQUINAS DE INDUÇÃO
A máquina de indução ou assíncrona é a mais utilizada das máquinas em corrente
alternada (AC). Esta pode ser utilizada como motor ou como gerador. O nome máquina de
indução, segundo (FITZGERALD, 2006), vem do fato de que o enrolamento de estator cria
um campo magnético rotativo que induz corrente alternada no enrolamento do rotor.
Quando a excitação é feita por uma fonte polifásica equilibrada, um campo magnético
é produzido no entreferro e gira na velocidade síncrona. Essa velocidade é determinada pelo
número de pólos do estator e pela frequência aplicada ao estator. Devido à aplicação de
correntes alternadas diretamente no estator da máquina, correntes no rotor são produzidas por
indução, isto é, por efeito de transformador.
Dessa forma, segundo (FITZGERALD, 2006), a máquina de indução pode ser vista
como um transformador generalizado em que potência elétrica é transferida entre rotor e o
estator conjuntamente com uma mudança de frequência e um fluxo de potência mecânica.
O rotor de uma máquina de indução pode ser de dois tipos: rotor bobinado ou enrolado
e rotor de gaiola de esquilo.
O rotor bobinado, nomenclatura mais usual, é construído na forma de um enrolamento
polifásico semelhante ao estator e com o mesmo número de pólos. Os terminais do
enrolamento do rotor são conectados a anéis montados sobre o eixo da máquina de indução.
Segundo (FITZGERALD, 2006), escovas de carvão fazem contato com esses anéis e
permitem que os terminais do rotor sejam eletricamente acessíveis. O rotor é constituído por
um núcleo formado por um pacote de chapas de aço silício ranhuradas. Sendo o rotor
bobinado, essas ranhuras recebem as bobinas.
Já no que se refere a rotor de gaiola de esquilo, estas ranhuras alojam condutores
dispostos paralelamente entre si e que são unidos nas suas extremidades por dois anéis que os
curto-circuita.
24
A simplicidade de tal construção apresenta vantagens notáveis em relação ao rotor
bobinado e consiste no modelo de máquina mais utilizado atualmente.
Em pequenas máquinas, o rotor de gaiola completo, ou seja, as barras, os anéis das
extremidades e o material da fundição são forjados sem isolação elétrica entre ferro e barras
(estas geralmente em cobre, liga de cobre ou alumínio).
Dentre algumas das vantagens da máquina de indução com rotor do tipo gaiola de
esquilo em relação à máquina de rotor bobinado apresentamos:
•
Ausência de contato elétrico entre rotor e estator (não se utilizam escovas,
anéis coletores, por exemplo);
•
O rotor de gaiola de esquilo se apresenta de fácil concepção em termos de
fabricação, sendo este mais barato e rápido de se fazer;
•
Apresenta manutenção reduzida, pois não apresentam anéis coletores e
escovas, que são componentes sensíveis e de alto custo de aquisição. Como resultado, temos
que esse tipo de máquina suporta melhor ambientes hostis.
A principal desvantagem é a falta de controle da velocidade mais simples em
máquinas com rotor do tipo gaiola de esquilo. Isso se verifica uma vez que em máquinas de
indução com rotor bobinado temos os terminais livres de cada uma das bobinas do
enrolamento. Esses terminais são ligados a anéis coletores e estes, por sua vez, são ligados a
um reostato cuja função é a de reduzir a corrente de partida elevada, no caso de motores de
elevada potência, conseguindo uma partida mais suave e controle de velocidade em operação
normal sob carga ou sem carga.
2.1.
Princípio de funcionamento
Em operação como motor temos uma tensão trifásica aplicada aos enrolamentos do
estator. Correntes irão fluir em cada enrolamento do estator. Estas correntes estarão defasadas
25
de 120° em relação à outra (CHAPALLAZ, 1990). Para fins de definições e descrição de
funcionamento, consideremos uma máquina de indução, funcionando como motor, contendo
enrolamento de estator trifásico, e com dois pólos.
Segundo (CHAPALLAZ, 1990), a corrente fluindo através de cada uma das bobinas
criará um campo magnético polarizado em direção ao seu eixo magnético (respeitando a regra
da mão direita ou definições de produto vetorial) o qual está defasado do enrolamento de 90°,
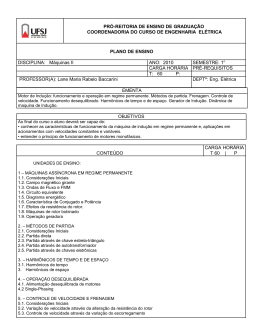
como se pode ver na figura 1. Devido ao formato da corrente ser senoidal, a força
magnetomotriz induzida em cada fase também irá oscilar entre um valor máximo positivo e
um máximo negativo. Apesar de cada um dos três vetores da força magnetomotriz ser
estacionário, o campo magnético resultante (que pode ser definido como Ф ) parece estar
girando, devido à variação temporal das correntes ao estator.
Figura 1 - Máquina simétrica com dois pólos e três fases (Fitzgerald, 2006)
O fluxo resultante Ф criado pelo estator se estabelece através do rotor, o qual se
encontra parado, e esse fato induz forças eletromotrizes nas barras do rotor.
26
As correntes do rotor são determinadas pelas magnitudes dessas tensões induzidas e
pela impedância apresentada pelo rotor na frequência de escorregamento, que é unitária para
um rotor parado. Portanto, o campo produzido pelas correntes do rotor gira com mesma
velocidade que o campo do estator, resultando em um conjugado de partida que faz com que o
rotor tenda a girar no sentido de rotação do campo de indução do estator. Caso o conjugado
seja o suficiente para superar a oposição à rotação imposta pela carga do eixo, carga a vazio
ou com carga aplicada, o motor atingirá a velocidade de operação de forma progressiva. No
entanto, segundo (FITZGERALD, 2006) essa velocidade não se iguala por si só à velocidade
síncrona, uma vez que nessa situação os condutores do rotor estariam estacionários em
relação ao campo do estator, não haveria indução de corrente e, conseqüentemente, nenhum
conjugado seria produzido.
2.2.
Escorregamento
Seja rotações por minuto a velocidade síncrona, dada pela equação 2. A diferença
entre a velocidade síncrona e a do rotor é referida comumente como escorregamento (de
slip, em literatura inglesa) do rotor. Assim, se pode definir o escorregamento normalizado e
relativo à velocidade síncrona como
=
F0g G0H
0g
(1)
Onde
= h
i
jó?(
k *
(2)
A velocidade do rotor pode ser expressa em termos do escorregamento e da velocidade
síncrona como:
= F1 − H
(3)
27
A velocidade angular do rotor, pode ser expressa em termos do escorregamento e da
velocidade síncrona angular como
= F1 − H
(4)
Segundo (FITZGERALD, 2006), o movimento relativo entre o campo girante do
estator e os condutores do rotor (barras) induz nesses últimos tensões de frequência dada
pela equação:
= *
(5)
Ainda segundo (FITZGERALD, 2006), com o rotor girando no mesmo sentido de
rotação que o campo do estator, a frequência das correntes do rotor será e elas produzirão
uma onda girante de campo magnético que irá girar com uma velocidade em relação ao
rotor no mesmo sentido do campo girante. Entretanto, superposta a essa rotação, está a
rotação mecânica do rotor. Assim, em relação ao estator, a velocidade da onda de fluxo
produzida pelas correntes do rotor será a soma dessas duas velocidades, sendo igual a
+ = + F1 − H = 2.3.
(6)
Conjugado e Escorregamento
Portanto, o que se percebe é que as correntes do rotor, cuja frequência é , produzem
uma onda de força magnetomotriz no entreferro que gira na velocidade síncrona , conforme
dedução acima. Como os campos magnéticos do estator e rotor encontram-se girando na
velocidade síncrona, a conclusão é que estão estacionários entre si, gerando um conjugado
constante para fins práticos.
Esse conjugado, que existe em qualquer velocidade mecânica do rotor que seja
diferente da velocidade síncrona, é chamado de conjugado de indução (FITZGERALD,
2006).
28
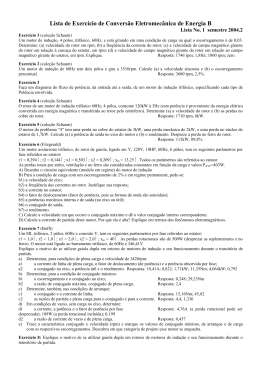
Tem-se uma curva típica de conjugado em função da velocidade de um motor de
indução operando com tensão e frequência constantes. Os fatores que determinam a forma
dessa curva podem ser observados pela equação do conjugado:
A = −. o o. 6
(7)
é uma constante (aglutinando a FMM do rotor proporcional à ) e um ângulo
que indica de quanto a onda de FMM do rotor está adiantada em relação à onda resultante de
FMM no entreferro.
O sinal negativo surge como necessário, porque a corrente induzida no rotor tem o
sentido que desmagnetiza o fluxo do entreferro, segundo (FITZGERALD, 1990;
FITZGERALD, 2006).
Em condições normais de funcionamento, o escorregamento é pequeno, sendo de dois
a dez por cento à plena carga na maioria dos motores de gaiola de esquilo. Para um motor de
60 Hz a frequência do rotor é de aproximadamente um a seis Hertz. Nesse intervalo a
impedância é grandemente resistiva e, portanto, independente do escorregamento. A tensão
induzida no rotor é proporcional ao escorregamento e adianta-se de 90° elétricos em relação
ao fluxo de entreferro resultante, segundo (FITZGERALD, 2006). Assim a corrente do rotor é
proporcional ao escorregamento e também é proporcional à tensão do rotor, estando essa
corrente defasada do fluxo de entreferro resultante em 180°.
Como resultado, a onda de FMM do rotor está atrasada de aproximadamente 90 graus
elétricos em relação ao fluxo do entreferro resultante e, assim 6 ≈ −1, segundo
(FITZGERALD, 2006).
Conforme o escorregamento do motor aumenta, aumenta também a impedância do
rotor, devido à contribuição crescente da indutância de dispersão do rotor. A corrente do rotor
também fica mais atrasada em relação à tensão induzida e o valor de 6 diminui.
29
O conjugado para o qual ocorre o valor máximo (ou de pico) é proporcional à
resistência do rotor. Portanto, um motor com rotor de gaiola de esquilo é substancialmente um
motor de velocidade constante tendo uma queda de velocidade de alguns poucos por cento
quando a máquina passa da condição de ausência de carga para a de carga plena (condições
nominais).
No caso de um rotor bobinado, a resistência de rotor pode ser aumentada, inserindo
resistências externas, variáveis ou não, aumentando o escorregamento de conjugado de pico e
diminuindo a velocidade até um valor que se queira.
Na figura 2 vemos um gráfico típico de conjugado em função do escorregamento e
velocidade, em dupla escala do eixo x.
Figura 2 - Curva característica conjugado versus velocidade (FITZGERALD, 2006)
2.4.
Modelando uma Máquina de Indução
Uma máquina de indução se parece de muitas formas com um transformador. Como
em um transformador, dois ou mais circuitos elétricos, ou seja, os enrolamentos do estator e
ou bobinas do rotor (ou barras), estão acoplados por um campo magnético tal que energia
elétrica possa ser transmitida de um circuito para o outro (CHAPALLAZ, 1996;
HINDEMARSH, 1984).
30
As considerações anteriores sobre fluxo e ondas de FMM podem ser expressas sob a
forma de circuito equivalente, em regime permanente. Nesse desenvolvimento, apenas
máquinas com enrolamentos polifásicos simétricos excitados por tensões polifásicas
equilibradas, são consideradas. Por conveniência, consideramos como se a máquina estivesse
em ligação estrela para levantar o modelo elétrico para uma das fases (uma vez que correntes
e tensões podem ser vistas como de fase).
Para o estudo de um motor de indução trifásico, em termos de modelo elétrico, basta
um adequado deslocamento de fase de 120° entre as bobinas (ou modelos levantados) e
correta interligação das extremidades das bobinas (se ligação em estrela ou em triângulo).
2.4.1.
O Modelo Elétrico
A onda de fluxo de entreferro ao girar sincronamente produz forças contra-
eletromotrizes (também chamadas de FCEMs) equilibradas nas fases do estator. Porém a
tensão de terminal, ou seja, , difere da FCEM pela queda de tensão na impedância de
dispersão equivalente do estator, ou seja, $ + &.
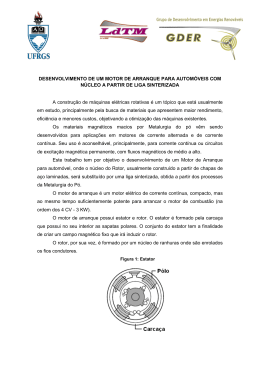
O que se percebe é a igualdade do modelo do estator de uma máquina de indução com
o de um transformador com o secundário aberto, como se pode ver na figura 3. Antes da
apresentação do equacionamento que caracteriza o modelo apresentado abaixo, se apresenta a
idéia física por traz do modelo, bem como as simplificações e considerações.
Figura 3 – Circuito equivalente monofásico do estator de um motor de indução
polifásico (Fitzgerald, 2006)
31
Como no caso de um transformador, a corrente de estator pode ser decomposta em
duas componentes: uma de carga e uma de excitação (magnetização). A componente de carga
produz uma FMM que corresponde à FMM da corrente do rotor. A componente de
excitação é a corrente de estator adicional que é necessária para criar o fluxo de entreferro
" (que está aplicada sobre a impedância do ramo alimentado pela
e é uma função da FMM !
componente de excitação ).
Segundo (FITZGERALD, 2006), a corrente de excitação pode ser decomposta em
uma componente de perdas no núcleo # e uma componente de magnetização "
, atrasada de
" . No circuito equivalente, mostrado na figura 3, a corrente de excitação é
90° em relação à !
levada em consideração incluindo-se um ramo em derivação, formado por uma resistência de
" .
perdas no núcleo $# em paralelo com uma reatância de magnetização & , ligado a !
Ainda conforme (FITZGERALD, 2006), ambas $# e & são determinadas para a
" próximo do valor esperado de operação;
frequência nominal do estator e para um valor de !
"
assume-se que esses valores permanecem constantes quando pequenos desvios em !
ocorrem durante o funcionamento normal do motor.
2.4.2.
Modelo do Rotor
Para completar o modelo, para o estator, precisamos do modelo equivalente para o
rotor de um motor de indução, utilizando grandezas refletidas para o circuito do estator e
perfeitamente determinadas. A partir da impedância equivalente ('q) vista a partir dos
" ), temos que:
terminais de FCEM do estator (!
r
'q = se
e
(8)
Quando um rotor real é substituído por um rotor equivalente, tendo um enrolamento
polifásico com os mesmos números de fases e espiras que o estator, mas produzindo a mesma
32
FMM e fluxo de entreferro que o rotor real, o desempenho não é alterado quando for
observado do ponto de vista dos terminais do estator. Esse conceito é muito útil para
modelagem de motores com rotor do tipo gaiola de esquilo nos quais a identificação dos
“enrolamentos de fase” não é evidente. O enrolamento de rotor de uma máquina de indução é
curto-circuitado e, desse modo, a impedância vista pela tensão induzida é simplesmente a
impedância de curto-circuito do rotor. A expressão que fornece a relação entre a impedância
de dispersão ' , na frequência de escorregamento, e a impedância de dispersão '()( , na
frequência de escorregamento, do rotor real deve ser:
' =
re
se
'()(
= *+
(9)
Segundo (FITZGERALD, 2006), *+ é a relação de espiras efetivas entre o
enrolamento do estator e o enrolamento do rotor real. Quando se quer conhecer as correntes
reais do circuito de rotor devemos conhecer a relação de espiras efetivas *+ . Porém, para fins
de obtenção de um modelo elétrico equivalente para motores de indução com rotor bloqueado
e para rotor gaiola de esquilo, pode-se utilizar uma representação de rotor equivalente para
fins práticos.
A dificuldade que se apresenta agora é representar o movimento relativo entre rotor e
estator (com tensões e correntes na frequência de escorregamento, cuja relação é conhecida)
por um rotor estacionário e com parâmetros mensuráveis.
Escrevendo a impedância de dispersão em função do escorregamento, temos, segundo
(FITZGERALD, 2006):
' = $ + t&
(10)
$ = é a resistência do rotor referida ao circuito de estator e & = é reatância de
dispersão do rotor associada à frequência de escorregamento.
33
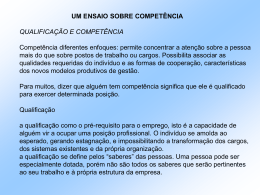
Essa reatância foi definida como sendo a reatância de dispersão do rotor referida ao
estator, na frequência do estator * , pois = * . A figura 4 mostra o circuito equivalente de
um rotor de motor de indução polifásico na frequência de escorregamento.
Figura 4 – Circuito equivalente monofásico do rotor de um motor de indução polifásico
(Fitzgerald, 2006)
Baseado em deduções de acordo com (FITZGERALD, 2006), a FMM de entreferro é
produzida pelos efeitos combinados da corrente de estator e da corrente de carga
equivalente . Considere-se que a onda de fluxo resultante induz a FCEM no rotor referido
" , e que ela induza a FEM no rotor !"
!
na frequência de escorregamento. Se não fosse o
efeito da velocidade, essas tensões teriam a mesma amplitude, porque o enrolamento do rotor
referido tem o mesmo número de espiras por fase que o enrolamento do estator. No entanto,
como a velocidade relativa da onda de fluxo em relação ao rotor é vezes a sua velocidade
em relação ao estator, a relação entre essas forças eletromotrizes é:
"
!"
= !
(11)
Manipulando-se a equação 10, chega-se à equação 12:
=
=
"e
r
se
ue
ve
+ t&
Dividindo-se a equação 11 por , tem-se que:
r
"
eg
se
Assim, conclui-se que:
≡
"e
r
se
(12)
=
ue
(13)
34
"e
r
se
=
ve
+ t&
(14)
Aqui se chegou ao objetivo de encontrar uma impedância de rotor estacionário
equivalente, para completar o modelo elétrico do estator e que representasse o comportamento
de tensões e correntes, de acordo com o escorregamento.
Como resultado, tem-se o circuito equivalente monofásico de um motor de indução
mostrado na figura 5. Lembra-se que todos os fenômenos elétricos que ocorrem no rotor,
quando vistos do estator, apresentam a frequência deste, porque o enrolamento do estator vê
as ondas de FMM e fluxo se deslocando na velocidade síncrona, como já comprovado na
equação 6.
Figura 5 – Modelo monofásico de um motor de indução polifásico (FITZGERALD, 2006)
2.5.
Análise do circuito equivalente
A análise do circuito equivalente mostrado na figura 5 serve para a determinação de
muitas características de desempenho de máquinas de indução em regime permanente.
Variações de corrente, velocidade, perdas, conjugado máximo e conjugado de partida são
bons exemplos. As deduções e teoria que se seguem serão praticadas para uma máquina de
indução operando como motor e, onde for conveniente, serão apresentadas informações sobre
as máquinas de indução operando como gerador, principalmente no que diz respeito ao
35
equacionamento de rendimentos e conjugados (a partir do modelo elétrico equivalente por
fase).
A potência ativa trifásica absorvida por uma máquina de indução, como motor, é dada
por
./0 = 3 +* +* 23-
(15)
onde - é o ângulo entre a tensão e corrente de fase. A equação 15 só servirá para o
cálculo considerando o modelo trifásico de um motor de indução. De forma genérica, pode-se
escrever da seguinte forma:
./0 = +* +* +* 23-
(16)
Pode-se ainda utilizar a formulação apresentada acima para descrever a potência ativa
n-fásica de saída para uma máquina de indução em funcionamento como gerador, ou seja,
.í = ./0 = +* +* +* 23-
(17)
A potência mecânica útil (.*#úBCD ), é função da velocidade do rotor e do conjugado.
.*#úBCD =
z
{i
A*#úBCD ()(
(18)
A eficiência 4 de uma máquina de indução operando como motor é dada por:
4=
A diferença entre
|}~úBCD
|C
./0 − .*#úBCD = ∑ 678
é chamada de somatório de perdas.
As seguintes perdas podem ser consideradas, segundo (CHAPALLAZ, 1990):
- mecânicas .9: : ou seja, perdas rotacionais por atrito e efeito de ventilação;
(19)
(20)
36
- perdas de ferro ou perdas de núcleo .;* : que são constituídas pelas perdas por
histerese e correntes parasitas. Perdas de ferro no rotor podem ser negligenciadas dado que as
mudanças na densidade de fluxo magnético no rotor são muito pequenas (o rotor gira próximo
à velocidade rotacional do campo magnético);
- perdas no cobre ou efeito joule .#<, e .#<, : com valores dados de forma genérica por
.#<, = +* o o $
(21)
.#<, = +* o o $
(22)
- perdas adicionais, que ocorrem nos enrolamentos do rotor. Essas perdas representam
cerca de 0.5% da potência mecânica da máquina e podem ser desprezadas para máquinas
pequenas.
Sendo assim, como se pode averiguar pelo circuito equivalente, a potência total
fornecida ao rotor através do entreferro (gap), a partir das +* do estator, é dada por:
.*?*)(@0é)/# = .@j = ./0 − .#<, − .;*
.*?*)(@0é)/# = +* o o F eH
v
(23)
(24)
Ainda se poderia definir a potência eletromagnética (.*?*)(@0é)/# ), a partir do
conjugado dito eletromagnético.
.*?*)(@0é)/# =
z
{i
A*?*)(@0é)/#( í0#(0
(25)
Por sua vez, as perdas elétricas totais do circuito do rotor podem ser determinadas a
partir do modelo elétrico do rotor proposto na figura 5, onde .
.#<, = +* o o $
(26)
Sendo a potência disponível no entreferro a potência eletromagnética, pode-se subtrair
desta as perdas de potência do rotor, calculadas pela equação 26, e obter a potência mecânica
desenvolvida pela máquina de indução, dada pela equação 27.
37
v
.*# = +* o o h e k − +* o o $
.*# = .*?*)(@0é)/# F1 − H
(27)
(28)
No entanto, a potência mecânica útil, .*#úBCD , pode ser obtida quando se desconta da
potência mecânica as perdas rotacionais .9: (a - atrito e v - ventilação). A expressão é dada
por
.*#úBCD = .*# − .9:
(29)
Para finalizar a análise, apresenta-se o conjugado útil, A*#úBCD , como segue.
|}~úBCD
(30)
0g~g |se |e h e kFGHG|
(31)
A*#úBCD = e
A*#úBCD =
0
B
g
e
0
B
O rendimento no motor de indução é definido como a razão da diferença entre a
potência eletromecânica .*# e as perdas rotacionais (atrito e ventilação) .9: , pela potência
(ativa) de entrada.
No caso da máquina de indução operando como gerador, o rendimento consistirá na
razão entre a potência ativa de saída, pela soma da potência eletromagnética .*# mais as
perdas rotacionais .9: , da seguinte forma:
4()( =
|gí
~C
4@*( = |
|C
|C
=
gí
~C
|}~ G|
=|
|C
|C
}~ 9|
(32)
(33)
O fator de potência 23- pode ser determinado pelo valor do argumento da
impedância total do circuito equivalente monofásico, conforme a figura 5, sendo:
')()? = F$ + t& H + h
ve
+ t& k //F$# // t& H
38
')()? = F$ + t& H +
Logo,
FF } H
h e 9ce k
g
}
FF } H
e
h 9ce k9
g
}
23- = cos FargF')()? HH
(34)
(35)
Para que se obtenha a corrente de fase do circuito equivalente da máquina de indução
operando como gerador e com ligação em estrela aterrada basta dividir a tensão de fase pela
impedância ')()? . A obtenção dessa grandeza (+* ) será importante para a obtenção do
rendimento do gerador de indução, conforme se verá a seguir.
Substituindo as equações 16 e 27 nas equações 32 e 33, chega-se a:
4()( =
0g~g |se |e h e kFGHG|
4@*( =
2.6.
g
0g~g g~ sg~ #(
0g~g g~ sg~ #(
0g~g |se |e h e kFGH9|
g
(36)
(37)
Conjugado e potência através do equivalente Thevenin
Com o intuito de enfatizar as relações de conjugado e potência, pode-se utilizar o
teorema de Thevenin para simplificar os circuitos. Pode-se, utilizando Thevenin (como se
chama simplificadamente o teorema de mesmo nome), achar o equivalente elétrico (ou seja,
uma fonte de tensão em série com uma impedância) entre dois terminais (a e b) de um circuito
(vide figura abaixo), sendo esse circuito constituído de elementos lineares e fontes de tensões
complexas (fasorialmente constantes).
A impedância equivalente de Thevenin é aquela que se apresenta nos terminais a e b
quando todas as fontes são zeradas no circuito (não sendo essas dependentes ou controladas).
A figura 6 mostra o circuito equivalente entre os terminais a e b, apresentando-se já a
resistência equivalente de Thevenin e a reatância equivalente de Thevenin.
39
Figura 6 – Circuito elétrico de motor de indução, com resistor equivalente à potência
mecânica (FITZGERALD, 2006)
Pela análise de Thevenin sobre o circuito da figura 5, percebe-se que a tensão da fonte
1
equivalente ,*E é resultado de um divisor de tensão (primeira linha da equação abaixo).
Desenvolvendo as associações em paralelo da equação abaixo e multiplicando-se o
numerador e o denominador pelo complexo conjugado do denominador da equação, chega-se
à equação abaixo
$# //t&
1
,*E =
F$ + t& H + F$# //t& H
c} 9Fv vd c} Gv cd c} H
1
vvdc}9v cd c}9v
k
,*E = h
Fv v Gc c He 9Fv c 9v c 9v c He
e
d
e
d }
e e
d }
e
d
}
e
(38)
1
Com a colocação da fonte ,*E em curto-circuito, como sugere o método, se pode
achar a impedância equivalente quando vista dos terminais a e b. O paralelo entre as
impedâncias é apresentando na expressão 39.
',*E = F$ + t& H//F$2 //t& H
(39)
Para facilitar os cálculos posteriores, pode-se obter $,*E e &,*E , a partir de ',*E , com
manipulação algébrica simples utilizando a multiplicação do numerador e denominador pelo
complexo conjugado do denominador, conforme segue.
$,*E =
2
$1 h$2 $1 &2 +$22 &1 & +$22 & k−&1 $22 $1 & −$2 &1 &2
F$1 $2 −&1 & H2 +F$1 & +$2 &1 +$2 & H2
(40)
40
&,*E =
2
&1 h$2 $1 &2 +$22 &1 & +$22 & k+$1 $22 $1 & −$2 &1 &2
F$1 $2 −&1 & H2 +F$1 & +$2 &1 +$2 & H2
(41)
A resistência de perdas no núcleo $# foi considerada para fins de deduções para que se
chegue a um modelo mais preciso.
Então, analisando-se o circuito resultante mostrado na figura 6, chega-se à expressão
da corrente , dada pela equação abaixo.
1
= ,*E ¢
ud,~¡ 9 ce 9 e
(42)
g
Cujo módulo é dado na equação que segue.
1
o o = o
,*E o £
¤Fvd,~¡ 9 e He 9 Fcd,~¡ 9ce He
g
¥
(43)
Por fim, tem-se a expressão do conjugado mecânico útil A*#úBCD , utilizando-se o
módulo da corrente e a resistência equivalente à potência mecânica ($
A*#úBCD =
Fd¦gH
|se |e ve
g
e
0
B
A*#úBCD =
=
Fd¦gH
|se |e ve
|se |e eFGH
g
e
FGH 0g
g
e
FGH 0g
=
|se |e e
g
e
0
g
FGH
).
(44)
(45)
A expressão simplificada do conjugado útil (disponível no eixo da máquina) em
função dos valores obtidos pela análise do teorema de Thevenin está apresentada na equação
abaixo, a qual parte do princípio de que o conjugado para uma máquina de indução polifásica
41
com +* pode ser obtido pela relação entre potência e velocidade angular, ou seja, A =
|
§g
=
se v
§g
.
A*#úBCD =
e
¨i 0g~g o1
d,~¡ o
z
0g
e
g
e e
Fvd,~¡ 9 H 9 Fcd,~¡ 9ce He
g
¢
(46)
Interessante notar que se tem também o valor do conjugado máximo que pode ocorrer
para uma máquina de indução polifásica. Pode-se calcular, igualmente, o valor do
escorregamento em que o conjugado máximo ocorre. Tal valor de conjugado pode ser
calculado conforme a equação abaixo.
A*#úBCDg} =
i.ª
§g
«
0g~g o1
d,~¡ o
e
Q® )(E<* = £
£
vd,~¡ 9¤vd,~¡ e 9Fcd,~¡ 9ce He
ve
¤vd,~¡ 9cd,~¡ 9ce
e
e
¥
¥¬
(47)
(48)
42
3.
ENSAIO E NORMALIZAÇÃO
A proposta desse trabalho é justamente um estudo de metodologia para obtenção de
modelo elétrico de máquinas de indução baseada em procedimentos de ensaio normalizados,
empregando medidor trifásico multifunção, sistema de medição de resistência a quatro fios e
software desenvolvido para aquisição e tratamento dos dados de ensaio.
A etapa de medição de resistência a quatro fios será feita com equipamento
apropriado. Em seção posterior, maiores detalhes serão apresentados sobre ligação elétrica
dos fios para a medição e informações sobre o sistema de medição de resistência, ou seja, do
aparelho que foi utilizado para a obtenção da resistência dos enrolamentos do estator.
Para a elaboração do software de aquisição e tratamento dos dados do ensaio, se
buscou a adequação e atendimento dos principais quesitos técnicos de equacionamento (na
maioria dos casos sugeridos pelas normas citadas), sobre procedimentos, utilização de
equipamentos, números de amostras indicadas para cada ensaio, sobre precisão de
equipamentos e demais detalhes referentes à questão de configuração do equipamento (via
software) pelo usuário. O objetivo de se apresentar no software os detalhes sugeridos por
normas como valores default de configuração visa a obtenção do modelo elétrico de máquinas
de indução, através do tratamento dos dados obtidos via medidor multifunção, para a posterior
análise da máquina de indução em termos de conjugado e rendimento.
Os parâmetros do circuito equivalente mostrado na figura 5 podem ser obtidos a partir
de ensaios elétricos do motor de indução. Precisam-se dos resultados da realização de ensaio a
vazio, ensaio de rotor bloqueado, ensaio de velocidade síncrona e da medição de resistências
CC dos enrolamentos do estator. Perdas suplementares também podem ser consideradas para
a obtenção de um modelo mais preciso. Não se utilizou esse modelo mais “preciso”, o que
incluiria as perdas suplementares, para o trabalho desenvolvido.
43
Basicamente as seguintes grandezas serão medidas e consideradas para a obtenção do
modelo elétrico equivalente:
a) medida da resistência do estator, fornecendo a resistência de cada enrolamento;
b) ensaio da máquina a vazio, com a medição da tensão aplicada ao estator, da
corrente de linha e da potência ativa;
c) ensaio da máquina com o rotor bloqueado, com medição da tensão aplicada ao
estator, da corrente de linha e da potência ativa.
d) ensaio da máquina à velocidade síncrona, com medição da tensão aplicada ao
estator, da velocidade, da corrente de linha e da potência ativa.
3.1.
Medição da Resistência
O equipamento utilizado para a medição da resistência foi o multímetro digital HP
3478A, cujas características são apresentadas a seguir.
Modelo 3478A;
5½ dígitos;
Calibração eletrônica;
DC Voltage 30mV ~ 300V;
AC Voltage (true RMS responding) 300mV ~ 300V;
Resistance 30 ohms ~ 30 M ohms;
DC current 300mA ~ 3A;
AC current (true RMS responding) 300mA ~ 3A.
Os detalhes sobre precisão desse equipamento encontram-se no anexo C.
Esta seção apresenta os métodos mais comuns para a medição da resistência elétrica
dos enrolamentos com corrente contínua, a uma determinada temperatura e para motores com
qualquer número de terminais disponíveis. Os métodos mais comuns são o da tensão e
44
corrente (queda de tensão) e o da ponte. Os valores encontrados, quando comparados com os
de fábrica, se disponíveis, podem fornecer indicações sobre a existência de espiras em curtocircuito, conexões e contatos em más condições. Desta forma é interessante um
acompanhamento desses valores ao longo do tempo de funcionamento, referindo tais valores
sempre à mesma temperatura para que se possa compará-los, como sugere (ASSOCIAÇÃO
BRASILEIRA DE NORMAS TÉCNICAS, 1996).
O método utilizado foi o método da ponte, dada a disponibilidade em laboratório de
equipamento de medição de resistência de precisão a quatro fios, o qual se verá a seguir.
3.1.1.
Método da ponte
Um circuito em ponte é o método mais exato para medir a resistência. A seguir são
mencionados dois circuitos de ponte mais comumente utilizados para medição direta da
resistência: a ponte de Wheatstone e a de Kelvin. De forma geral, a ponte de Wheatstone é
utilizada para medição de resistências de 5 Ω a 10.000 Ω, enquanto a ponte de Kelvin é para
valores de 100 µΩ a 5 Ω, por ser obtida com maior exatidão, devido à eliminação de erros
provenientes da resistência de contato. Outros circuitos podem ser encontrados em
(AMERICAN NATIONAL STANDARDS INSTITUTE, 1978).
3.1.1.1. Ponte de Wheatstone
O circuito da ponte de Wheatstone consta de quatro ramos de resistência, uma fonte de
corrente (geralmente uma bateria) e um detector. A medição da resistência desconhecida $I é
feita em função de três resistências conhecidas. O ajustamento das três resistências é feito
para a corrente zero no detector sob equilíbrio; por isto este é um método de medição da
resistência de “equilíbrio nulo” (ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS,
2002).
45
Quando a ponte está equilibrada, como indicado pela leitura nula no detector D,
apresentado explicitamente na figura 7 (que mostra a ligação elétrica e configuração de uma
ponte de Wheatstone) a resistência desconhecida é dada pela equação abaixo.
$I = h
Onde
v
v¯
k $
(49)
$ e $J são valores dos resistores auxiliares e
$ é o valor do resistor-padrão.
Figura 7 – Circuito em ponte (ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS,
2002)
3.1.2.
Procedimento de medição
O procedimento para a medição consiste em, segundo (ASSOCIAÇÃO BRASILEIRA
DE NORMAS TÉCNICAS, 2002):
a)
Calibrar e ajustar a ponte conforme as instruções de operação, em
conformidade com o equipamento utilizado;
$I );
b)
Fazer a ligação da ponte aos terminais do enrolamento (aqui representado por
c)
Devem ser efetuadas pelo menos três leituras, modificando-se a cada vez o
equilíbrio da ponte. O valor da resistência é obtido calculando-se a média aritmética dessas
leituras, desprezando-se os valores que diferem em mais de 1% do valor médio;
46
d)
A resistência dos enrolamentos do circuito rotórico, no caso de motores de
anéis, deve ser medida entre os citados anéis ou, de preferência, diretamente nos terminais dos
enrolamentos, de modo a não incluir a resistência das escovas e de seus contatos;
e)
Devem ser registradas as temperaturas do enrolamento no início e no final do
ensaio, bem como o tempo de execução de cada medição.
3.1.2.1. Correção da Temperatura
Para a correção da resistência de um enrolamento, $) , determinada por ensaio à
temperatura do enrolamento, K) , para uma temperatura especificada K , deve-se utilizar a
equação
$ = $)
F)g 9°H
F)B 9°H
(50)
Onde:
$ é a resistência de enrolamento, corrigida para uma temperatura especificada, K ;
K é a temperatura especificada para correção da resistência, em graus Celsius;
$) é a resistência do enrolamento obtida no ensaio, à temperatura K) ;
K) é a temperatura do enrolamento por ocasião da medição da resistência, em graus
Celsius;
N é igual a 234,5 para cobre eletrolítico com 100% de condutividade e 225 para
alumínio com condutividade em volume de 62%, em graus Celsius.
3.1.2.2. Obtenção dos valores de resistência
Essa obtenção depende de como estão ligados os enrolamentos:
47
a)
Se todos os terminais dos enrolamentos forem acessíveis, a medição é realizada
diretamente entre esses terminais (caso de motores com seis e 12 pontas ou três pontas com o
neutro acessível – ligação estrela);
b)
Se os terminais dos enrolamentos não forem acessíveis, a medição é realizada
entre dois terminais sucessivamente, utilizando a resistência equivalente, dependente da
ligação dos enrolamentos, cuja determinação não consta neste texto (caso de motores com
ligação estrela sem neutro acessível ou ligação triângulo).
3.1.3.
Resultado das medições
Os resultados das medições efetuadas devem ser comparados com os resultados
obtidos em ensaios anteriores (do fabricante, se possível), tendo-se o cuidado de utilizar as
correções de temperatura ambiente a uma mesma base, normalmente para 25ºC.
Em caso de discordâncias maiores que 2% deve ser considerada a existência de
anormalidade, tais como espiras em curto-circuito, número incorreto de espiras, dimensões
incorretas dos condutores, conexões e contatos em más condições.
3.2.
Ensaio a Vazio
O ensaio a vazio fornece informações em relação à corrente de excitação e às perdas a
vazio da máquina ensaiada. Geralmente se realiza este ensaio na frequência nominal e com
tensões polifásicas equilibradas aplicadas aos terminais do estator.
Antes de realizar as medidas das grandezas elétricas, deve-se deixar o motor
funcionando um tempo suficiente para que a lubrificação dos mancais esteja bem feita.
As medidas que deverão ser adquiridas nesse ensaio são:
Tensão de fase µV¶ = VPQRS,TU ;
Corrente de fase µA¶ = IPQRS,TU ;
48
Potência trifásica µW¶ = PTU .
Caso a tensão de linha seja medida, devemos calcular a tensão de fase, dividindo a
tensão de linha pelo fator √3.
A vazio, a corrente de rotor é a mínima necessária para produzir conjugado suficiente
para superar as perdas por atrito e ventilação, associadas à rotação do motor.
Desprezando-se as perdas joule do rotor (perdas sobre $# ), teremos que as perdas
rotacionais (.()#/(0? ), nas condições nominais de frequência e tensão nominal, poderão ser
encontradas pela simples subtração das perdas ôhmicas do estator da potência medida no
ensaio. Assim,
.()#/(0? = .:X − +* +*,:X $
(51)
As perdas rotacionais são consideradas constantes e iguais ao seu valor em vazio nas
condições de plena carga. Porém, como a resistência $ varia com a temperatura, se deve
cuidar para que se use a resistência na temperatura do ensaio, conforme já visto na seção
medição da resistência.
Analisando-se novamente o circuito da figura 5, se vê que a resistência equivalente do
v
rotor ( e) é muito elevada para valores muito pequenos de escorregamento quando o motor
está em operação a vazio. Em virtude dessas simplificações, vê-se que a reatância aparente
(&:X ), que é vista pelos terminais do estator a vazio, estará muito próxima de & + & ,
segundo (FITZGERALD, 2006), ou seja:
&:X = & + &
(52)
A partir das medidas feitas, podemos encontrar a potência reativa trifásica e, a partir
desta, determinar a reatância &:X .
Y:X = ¤+* +*,:X +*,:X −.:X (53)
49
&:X = 0
½¾
g~g sg~,¾
e
(54)
As normas nos apresentam algumas definições sobre os tipos de perdas que estão
presentes no ensaio a vazio. O conhecimento dessas e sua consideração são importantes para
o levantamento de um modelo de grande precisão. Abaixo segue os tipos definidos e a
referência.
3.2.1.
Tipos de perdas
Segundo (ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS, 2002) vários
tipos de perdas podem ser consideradas em motores trifásicos de indução. A seguir, mostramse as principais, contendo definições e, quando importante, a forma de se calculá-las.
3.2.1.1. Perda I²R no Estator
Esta perda é igual a 1,5 I²R para motores trifásicos, onde:
I é a corrente eficaz medida ou calculada por terminal de linha a uma carga
especificada;
R é a resistência em c.c entre quaisquer dois terminais de linha.
3.2.1.2. Perda I²R no Rotor
Essa perda, incluindo as perdas por contato da escova para motores com rotor
bobinado, deve ser determinada pelo escorregamento em fração decimal utilizando a equação
.678 ²$ 3 3K3 = F.*0) − .678se v 0( *))( − .678 0ú#?*( H ∗ (55)
50
3.2.1.3. Perda no núcleo, atrito e ventilação
Consiste na potência estabilizada (após lubrificação, estabilização de vibrações,
mancais) despendida para manter um conjugado para a condição em vazio do motor de
indução. A separação da perda no núcleo da perda por atrito e ventilação deve ser realizada
pela leitura da tensão, corrente e potência de entrada à freqüência nominal, quando a tensão é
variada desde 125% da tensão nominal, até o ponto onde a continuação da redução da tensão
acarrete o aumento da corrente.
3.2.1.4. Perda por atrito e ventilação
O valor da potência de entrada menos a perda I²R no estator versus a tensão é colocada
num gráfico, e a curva obtida é estendida até a tensão zero. A interseção com o eixo das
ordenadas para tensão zero é a perda por atrito e ventilação. A interseção pode ser
determinada com mais precisão se os valores de potência de entrada menos a perda I²R no
estator forem colocados num gráfico versus a tensão ao quadrado para valores na faixa de
menor tensão. Um exemplo é a curva tracejada da figura 8, situada abaixo.
Figura 8 – Determinação da perda por atrito e ventilação (ASSOCIAÇÃO BRASILEIRA DE
NORMAS TÉCNICAS, 2002)
51
3.3.
Ensaio com rotor bloqueado
Fornece informações sobre as reatâncias de dispersão e perdas ôhmicas nos
enrolamentos. Todos os detalhes devem estar ajustados antes da realização desse ensaio. Isso
deve ser considerado, porque o rotor bloqueado impede que a ventilação do motor seja feita e
isso acarreta um aumento de temperatura. Instrumentos, procedimentos e planilhas de
controle devem estar preparados desde a energização do motor de indução. O escorregamento
de um motor bloqueado é igual à unidade (não há movimento do rotor).
Ensaios com rotor bloqueado, com alimentação trifásica, envolvem esforços
mecânicos e taxas de aquecimento elevadas. Por isso é necessário que:
a)
O meio mecânico de bloqueio do rotor tenha rigidez adequada para evitar
possível dano ao pessoal ou ao equipamento;
b)
O sentido de rotação seja estabelecido antes do ensaio;
c)
O motor esteja à temperatura ambiente antes do início do ensaio.
As leituras de conjugado (se for utilizado algum sensor de conjugado) e corrente
devem ser feitas tão rapidamente o quanto possível e, para obter valores representativos, a
temperatura do motor não deve ultrapassar o limite de elevação de temperatura nominal
acrescido de 40°C. As leituras para qualquer ponto devem ser feitas dentro de 5s após a
tensão ser aplicada.
As medidas que deverão ser adquiridas nesse ensaio são:
Tensão de fase µV¶ = VPQRS,Z[ ;
Corrente de fase µA¶ = IPQRS,Z[ ;
Potência trifásica µW¶ = PZ[ ;
Frequência do ensaio µHz¶ = fZ[ .
Um motor de indução, segundo (FITZGERALD, 2006), é mais complexo do que um
transformador, embora o motor de indução tenha um comportamento semelhante a um
52
transformador em curto-circuito no ensaio de rotor bloqueado. A impedância poderá mudar
conforme a posição do rotor, ao ser bloqueado. Para nossa consideração (usando motores de
gaiola) isso não afeta significativamente.
Para um interesse em se analisar as características normais de funcionamento, o ensaio
deve ser feito com uma aplicação de tensão nos terminais do estator de modo que a corrente
aplicada seja o mais exato quanto possível da corrente nominal (devido ao fato de as
reatâncias serem muito afetadas pela saturação magnética do rotor).
A frequência também deve ser reduzida para que os valores efetivos de resistência e
dispersão não difiram. Deve-se usar cerca de vinte e cinco por cento da frequência nominal
para ensaios de rotor bloqueado, conforme sugerido em (AMERICAN NATIONAL
STANDARDS INSTITUTE, 2004). Porém, para máquinas com potência abaixo de 25 HP
nominais, pode-se utilizar a frequência nominal (FITZGERALD, 2006).
A partir das medidas feitas, se pode encontrar a potência reativa trifásica e, a partir
desta, determinar a reatância &J? .
YJ? = ¤+* +*,J? +*,J? −.J? &J? = h+ k F0
+
½¯D
g~g sg~,¯D
¯D
e
H
(56)
(57)
Na equação acima, é a frequência nominal da máquina e J? é a frequência do
ensaio. A resistência de rotor bloqueado (vista dos terminais do estator) pode ser obtida como
na equação imediatamente abaixo:
$J? = F0
|¯D
g~g sg~,¯D
e
H
(58)
Com esses parâmetros calculados, se partirá para uma análise da figura 5. Com uma
aproximação conveniente, ou seja, $ ≪ & , se chegará à impedância equivalente de rotor
bloqueado, conforme mostrado nas equações a seguir.
53
$J? = $ + $ Fc
&J? = & + & F
c}
e 9c}
c}
H
ce 9c}
(59)
H
(60)
Com uma simples manipulação matemática, podem-se isolar as variáveis que são de
interesse direto para a obtenção dos parâmetros elétricos equivalente. Assim, se terá:
& = F&J? − & HFc
$ = F$J? − $ HF
3.4.
c}
d 9c} Gc¯D
ce 9c} H
c}
H
(61)
(62)
Ensaio à Velocidade Síncrona
Através do auxílio de uma máquina primária, coloca-se a máquina de ensaio na
velocidade síncrona ( = 0) com a intenção de “desacoplar” o circuito equivalente ao rotor.
Com esse procedimento não se terá potência transferida pelo entreferro da máquina de
indução e, com isso, a potência ativa medida nos terminais da máquina durante o ensaio
corresponderá às perdas ôhmicas do estator somadas com as perdas no núcleo do estator.
A figura abaixo apresenta o esquema elétrico equivalente, visto dos terminais da
máquina, para o ensaio à velocidade síncrona. De fato, quando a máquina for colocada na
velocidade síncrona (via máquina primária) ocorre o desacoplamento elétrico do circuito
equivalente do rotor ( = 0).
Figura 9 – Ensaio à velocidade síncrona
54
3.5.
Obtenção dos parâmetros elétricos
Devido ao desequilíbrio comum entre as potências medidas em ensaios (devido a
diferenças entre os enrolamentos do estator), pode-se optar pelo cálculo dos parâmetros
separados para cada fase, obtendo-se, com isso, três circuitos equivalentes no total. Uma boa
prática pode ser a utilização do circuito equivalente médio entre as fases para o levantamento
das características e comportamento da máquina.
Primeiramente, calculam-se as perdas rotacionais, as perdas no ferro do núcleo e as
perdas suplementares, pela fórmula:
.9: = .:X − Ifase,vz . $
(63)
A partir das medidas feitas para o ensaio a vazio, pode-se encontrar a potência reativa
trifásica e, a partir desta, determinar a reatância &:X como segue e como já foi apresentado no
item 3.2.
Y:X = ¤+* +*,:X +*,:X −.:X &:X =
½¾
0g~g sg~,¾ e
(64)
(65)
A partir das medidas feitas para o ensaio de rotor bloqueado, pode-se encontrar a
potência reativa trifásica e, a partir desta, determinar a reatância &J? como segue e como já foi
apresentado no item 3.3.
YJ? = ¤+* +*,J? +*,J? −.J? &J? = h+ k F0
+
¯D
½¯D
g~g sg~,¯D
e
H
(66)
(67)
Com esses parâmetros calculados, se partirá para uma análise da figura 5. Com uma
aproximação conveniente, ou seja, $ ≪ & , se chegará à impedância equivalente de rotor
bloqueado, conforme mostrado nas equações a seguir.
55
$J? = $ + $ Fc
&J? = & + & Fc
c}
e 9c}
c}
e 9c}
H
(68)
H
(69)
Para a obtenção dos parâmetros elétricos da máquina a partir desse ponto do
equacionamento, deve-se levar em consideração a classe da máquina de indução apresenta e
se estabelecer uma relação entre as reatâncias de dispersão equivalente do estator & e a
reatância de dispersão equivalente do rotor &.
De acordo com (AMERICAN NATIONAL STANDARDS INSTITUTE, 2004), para a
obtenção dos parâmetros elétricos de um motor de indução, devemos definir uma relação
válida entre as reatâncias da máquina, a fim de obtenção das demais grandezas em questão.
Dado o tipo de motor poderemos adotar uma relação entre & e & conforme a tabela 1
apresentada abaixo.
Tabela 1 - Distribuição empírica de reatâncias de dispersão em motores de indução
(FITZGERALD, 1990)
Classe do Motor
A
B
C
D
Bobinado
Fração de ÇÈ + ÇÉ
Descrição
Conjugado normal de partida, corrente normal de partida
Conjugado normal de partida, baixa corrente de partida
Alto conjugado de partida, baixa corrente de partida
Alto conjugado de partida, alto escorregamento
Desempenho varia de acordo com a resistência do rotor
ÇÈ
0,5
0,4
0,3
0,5
0,5
ÇÉ
0,5
0,6
0,7
0,5
0,5
Se utilizando a equação 52 para isolar o & e o substituir na equação 61, tem-se que,
segundo (FITZGERALD, 2006):
& = F&J? − & HFc ¾Gc d H
c Gc
¾
¯D
(70)
Com a relação tirada da tabela 1, pode-se estabelecer uma variável M, definida como
cd
ce
= b e, com isso se estabelecer o valor de & conforme a equação 70.
56
Para fins de software e para que sejam facilitados os cálculos, determinam-se quatro
equações deduzidas a partir das relações obtidas em função da classe do motor.
Se o motor for da classe A, D ou Rotor Bobinado (sendo, portanto, M=1) deduziu-se a
equação abaixo, apresentada por (FITZGERALD, 2006), ou seja:
b & + &J? F1 − bH − &:X F1 + bH& + &:X &J? = 0
& − 2&:X & + &:X &J? = 0
(71)
(72)
Se o motor for da classe B (sendo, portanto, M= ¨):
0,4489 & + F0,333 &J? − 1,333 &:X H& + &:X &J? = 0
(73)
¨
Se o motor for da classe C (sendo, portanto, M= Í):
0,184 & + F0,571&J? − 1,429&:X H& + &:X &J? = 0
Após, calculamos o & = b&.
(74)
A reatância de magnetização & pode ser calculada a partir da equação 52, obtendo-se
a equação resultante abaixo, onde:
& = &:X − &
(75)
Finalmente, usando-se a resistência de estator conhecida, os valores de & e &, se
pode calcular a resistência dada pela equação 62, completando o modelo elétrico.
$ = F$J? − $ HF
ce 9c} H
c}
(76)
O ensaio a velocidade síncrona fornece os valores das perdas no núcleo do estator,
pela fórmula:
.0ú#?*(F*))(H = .: − +*,: . $
(77)
Para operações com escorregamentos baixos (condições próximas às nominais), podese aproximar o valor das perdas no ferro da máquina como sendo o valor das perdas no ferro
57
do núcleo do estator, pois as perdas no rotor são proporcionais ao escorregamento, portanto,
podendo ser desconsideradas, o que torna o modelo aceitável e mais preciso.
Mas para um modelo mais preciso pode-se utilizar o $# nesse cálculo. Como a
ramificação do núcleo é composta pelo valor da resistência equivalente do ferro $# em
paralelo com a reatância de magnetização & , pode-se chegar à equação abaixo, a qual
conduzirá à expressão de perdas do núcleo .0ú#?*(F*))(H :
.88Ð6Ð3 F$# , t& H = v
v .c} e
e
9c}
e
+ t. v
v e .c}
.0ú#?*(F*))(H = +*,: . v
$# =
e
9c} e
v .c} e
Isolando-se $# , se obtém:
e 9c e
}
e
} e .Óg~,g e
} e
9Ò ¢ GÔ.c} e
ÑúD~
F~gBB
H
ÑúD~
F~gBB
H
(78)
(79)
(80)
para completar o modelo elétrico.
3.5.1.
Instrumentos e equipamentos
A listagem dos instrumentos e detalhes maiores, com exceção do medidor multifunção
WT1030M (YOKOGAWA, 1996), o qual terá uma seção de apresentação e demais
informações em anexo (anexo A) e justificativas de utilização, serão apresentadas a seguir.
A tabela 2 nos fornece sob a forma de colunas as principais características de cada
instrumento utilizado nos ensaios para levantamento dos parâmetros elétricos de máquinas de
indução. Aqui não serão detalhados materiais para montagem das experiências e testes
práticos, devido à fuga do tema e por ser de baixa prioridade. Assumem-se a utilização de
ferramentas adequadas, cabos com conexões seguras e dimensionamento adequado dos
mesmos (cálculos de correntes de circulação pelos cabos calculados de antemão). Na seção de
ensaio de validação estes dados serão mostrados. Considerações a cerca de montagens para
58
testes serão feitas na seção 6, onde um esquema geral, com detalhamento suficiente para
identificação dos componentes será apresentado.
Tabela 2 – Relação dos instrumentos de laboratório utilizados nos ensaios a vazio e rotor
bloqueado
Instrumento
Medidor
digital de
corrente,
tensão,
potência ativa
e reativa
Grandeza
Tensão (V)
Corrente (A)
Potência Ativa (W)
Potência Reativa (Var)
Multimetro
Digital
Resistência (Ohm)
Tacômetro
Velocidade (RPM)
Variador de
Tensão
(VARIAC)
Tensão (V)
Dados do instrumento
Fabricante
Yokogawa
Tipo
Digital Power Meter
Modelo
WT1030M
Resoluções
ver
ANEXO C
Resolução
16 bits
Fabricante
Hewlett Packard
ver
Tipo
Multímetro Digital
ANEXO C
Modelo
3478A
Fabricante
Takotron
1 RPM
Tipo Digital a cristal de quartzo
Modelo
TS-301
Fabricante
Equacional
Tipo
Variac Tripolar
Saída
0 a 240V
Corrente Saída (A)
10
59
4.
AUTOMAÇÃO COM MEDIDOR MULTIFUNÇÃO
O medidor multifunção de modelo WT1030M apresenta inúmeras características que
justificam a sua utilização no processo de automação de ensaios elétricos de máquinas de
indução. Segundo (IWASE, 1997) o equipamento utiliza avançada tecnologia de amostragem
digital e pode medir sinais de corrente contínua (DC) e corrente alternada (AC) com
frequências de 0,5 Hz até 300 kHz. É um equipamento com excelente precisão (vide anexo C
para maiores informações) e que oferece grande versatilidade para ser utilizado em testes de
motores. Esse aparelho possibilita também comunicação com o computador via GPIB.
Na figura abaixo apresenta-se uma imagem do medidor multifunção WT1030M,
utilizado no desenvolvimento do projeto de obtenção do modelo elétrico de máquinas de
indução, com detalhes dos displays, botões de seleção de configuração e detalhe de
possibilidade de impressão de “relatório” de medidas configuradas. O dispositivo da figura
abaixo apresenta o opcional Printer, o qual não se verifica no dispositivo utilizado no
desenvolvimento do projeto, cujo modelo utilizado foi WT1030M.
Figura 10 – WT1030M da Yokogawa (YOKOGAWA, 1996)
4.1.
Desempenho básico
A precisão fundamental é de 0,2%, com as medidas de voltagem e corrente estando
dentro da banda de frequência, seja medida em DC ou AC, de 0,5 Hz até 300 kHz ou de 200
kHz para medidas de potência, segundo (YOKOGAWA, 1996).
60
A taxa de atualização do display de 100ms permite a caracterização de motores em
curtos intervalos de tempo.
4.2.
Princípio de funcionamento
Segundo (IWASE, 1997), o equipamento pode ser dividido como seções ou blocos,
onde se destaca a entrada, o DSP, a CPU, o display e a alimentação. Na seção de entrada, um
sinal analógico é convertido para um sinal digital. Tem-se como entrada, basicamente, um
sinal de corrente e um sinal de tensão, através de conectores isolados entre si. O esquema de
detecção de tensão é feito com divisor de corrente. A detecção da corrente é feito através de
resistor shunt. Cada valor detectado pelo bloco de entrada é normalizado por um circuito
operacional para transformar os sinais lidos em valores de 16 bits, a uma taxa de
aproximadamente 60 kHz, o que é feito na etapa de conversão Analógico/Digital (A/D). Esses
valores digitais de 16 bits são isolados do próximo bloco (do bloco DSP) através de circuito
opto-acoplador.
Seguindo o diagrama sugerido na figura a seguir, a qual mostra um diagrama de
blocos para a família WT1000, esse sinal convertido para digital é corrigido na seção DSP, ou
seja, os valores de entrada são calculados para que se tenham valores eficazes, ou seja, para
que se tenham os valores RMS de tensão e corrente. Portanto, segundo (IWASE, 1997), nesse
bloco são calculados os valores de potência ativa (através de um somatório algébrico de
potências ativas instantâneas divididas pelo número de amostras em um período), tensão RMS
e corrente RMS, através de integração.
Com os valores de potências ativas, correntes e tensões, as potências reativas e fatores
de potências são calculados ainda no DSP.
61
Figura 11 – Diagrama de blocos do medidor de potência digital da série WT1000 (IWASE,
1997)
4.3.
Princípios de cálculos
Para o levantamento de parâmetros elétricos da máquina de indução ensaiada em
laboratório (a qual posteriormente será descrita, em seção própria destinada à apresentação e
comparação de resultados) utilizou-se uma forma de medição indireta para corrente elétrica,
baseada em emprego de transformadores de corrente, e de forma direta para tensões elétricas.
Para tanto, devido às facilidades de utilização e ligação elétrica, optou-se pela utilização da
configuração de fios (wire, como o aparelho descreve as formas possíveis de conexões
elétricas de fios) chamada de 3P4W, ou seja, medição trifásica a quatro fios.
Porém, analisando-se com cuidado o algoritmo empregado para cálculo, a partir dos
blocos DSP e CPU, das grandezas elétricas, se percebeu um erro conceitual no manual a cerca
do cálculo da potência aparente total do sistema analisado ou ensaiado. Com o intuito de
verificar-se a forma como é feito o cálculo da potência aparente total do sistema, realizou-se
um ensaio com cargas desequilibradas de forma proposital. Essa decisão foi tomada
considerando o fato de que no algoritmo de cálculo da potência mencionada, o manual
62
indicava uma simples soma algébrica das potências aparentes obtidas elemento a elemento, no
caso de medição trifásica. Porém, o que se sabe sobre potências, suas relações matemáticas e
análises fasoriais dos triângulos de potência, de acordo com a teoria como a presente em
(FITZGERALD, 2006), induz ao pensamento de que tal forma de cálculo só se verifica
verdadeira se a carga for perfeitamente equilibrada, situação essa em que a potência aparente
total do sistema será dada pela simples soma das potências aparentes de cada elemento
individualmente.
Para que tal problema de algoritmo do medidor multifunção seja considerado na
elaboração do algoritmo de automação das medidas elétricas efetuadas durante ensaios de
máquinas de indução (desenvolvido em LabVIEW e foco desse projeto), um ensaio de
verificação-conclusiva foi elaborado, cujas diretrizes e resultados constam no subitem 4.1.4 e
se encontra de forma mais detalhada no anexo A desse trabalho, para comprovação do erro de
algoritmo de cálculo para cargas desequilibradas. A seguir um resumo das conclusões.
4.4.
Ensaio de verificação de algoritmo
Com o intuito de verificar a forma de medição de potências do medidor de grandezas
da Yokogawa WT1030M, quando utilizado para medição de cargas trifásicas desequilibradas,
realizou-se um ensaio com cargas conhecidas e determinadas e, posteriormente, medidas
usando o WT1030 foram efetuadas para fins de comparação com os resultados via cálculo
matemático. Para confrontar os resultados medidos pelo medidor WT1030M e validar a forma
de cálculo se utilizou como fonte de tensão AC HP 6814B AC Power Source/Analyser que,
além de fornecer uma tensão configurável e estável, efetua medidas de potências ativas e
reativas, tensão e corrente. E, para que haja validação matemática, se apresenta no anexo A
todo o procedimento realizado, com os detalhamentos de cálculos e resultados obtidos. A
63
seguir um resumo será apresentado dos procedimentos realizados e das conclusões a que se
chegou com tal ensaio do multimedidor WT1030M.
O circuito montado está apresentado na figura 11 (ligação em estrela). A seguir se
seguem as explicações e breves resultados obtidos desse ensaio do multimedidor de grandezas
WT1030M. Relembrando que encontra-se no anexo A maiores informações sobre os
resultados obtidos e sobre o próprio ensaio do WT1030M.
As tensões trifásicas aplicadas ao circuito, dada em Volts RMS, são definidas
vetorialmente como:
V"
ÕÖ = V ∠0° µV¶
V"
ØÖ = V ∠120° µV¶
V"
ÙÖ = V ∠240° µV¶
As impedâncias, dadas em ohms, foram definidas como segue abaixo.
" = $ ∠0° µΩ¶
'
" = Ú$ + & ∠Û ° µΩ¶
'
"¨ = &∠90° µΩ¶
'
O diagrama de conexões elétricas entre impedâncias, rede de alimentação trifásica
equilibrada e medidor multifunção está apresentado abaixo, conforme apresenta a figura 11.
Figura 12 – Circuito elétrico utilizado para medição, ligado em estrela aterrada
64
4.4.1.
Procedimentos de ensaio
Para o ensaio de comprovação do algoritmo de cálculo, a ligação do medidor
WT1030M e das “cargas” foi efetuada conforme a figura 12.
Tal ligação tem por objetivo a obtenção das grandezas (tensão V, corrente I, potências
ativa, reativa e aparente) a partir da ligação em cada elemento do WT1030M a cada uma das
cargas avaliadas. Simultaneamente, se efetuou a medição das mesmas grandezas utilizando a
fonte HP 6814B AC Power Source/Analyser.
4.4.2.
Resultados
A tabela 3 apresenta os resultados de potência aparente trifásica medida pelo medidor
WT1030M e o corrigido via software. Uma terceira coluna apresenta os valores de potência
que deveriam ser encontrados e que foram obtidos teoricamente.
Tabela 3 – Tabela de valores medidos pelo WT1030M e cálculos efetuados
Cálculos realizados a partir de deduções teóricas (mostrado na seção 3 do ANEXO A)
Cálculos Teóricos
V Média (V)
I Média (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
50,121
49,163
70,208
0,7002
45,554°
Não útil
127
(desequilíbrio)
Medições efetuadas pela fonte HP6814B AC Power
Médias e somatórios das medidas fornecidas pela fonte HP 6814B AC Power Source/Analyser
V Média (V)
I Média (A)
Q total (Var)
P total (W)
50
49,1
Não útil
127
(desequilíbrio)
S total (VA)
PF
Só fornece
Só fornece
por fase
por fase
Deg (°)
Não fornece
Medições com WT1030 e software em LabVIEW
Medidas fornecidas pelo WT1030M e software em LabVIEW
Elemento 1 - Carga Resistiva Pura
VRN (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
126,94
0,251
0,66
31,832
31,832
1
0
65
Elemento 2 - Carga Mista Indutiva
VSN (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,192
0,187
16,787
16,857
23,79
0,7088
44,862
Elemento 3 - Carga Indutiva Pura
VTN (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,167
0,25
31,652
3,162
31,812
0,7593
0,0994
Somatório (Σ) fornecido pelo WT1030M
V Média (V)
I Média (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,099
0,229
49,099
51,851
87,439
0,75814
41,6045
Cálculos efetuados seguindo as equações de cálculo do manual do WT1030M
Somatório (Σ) - Calculado empregando as fórmulas do manual do WT1030M para as medidas acima
V Média (V)
I Média (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,1
0,229
49,1
51,85
87,44
0,758
41,60
Resultados das medidas com algoritmo de correção em LabVIEW
Medidas fornecidas pelo WT1030M (com algoritmo de correção)
V (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,099
0,229
49,099
51,851
71,409
0,856406
43,4398
A tabela 4 apresenta os valores efetuados pela fonte HP 6814B AC Power Source/
Analyser. Porém, essa fonte não fornece o valor de potência aparente total do circuito e serve
somente para comparação dos demais valores e certificação dos resultados obtidos.
Tabela 4 – Valores medidos pela fonte da HP 6814B
Carga Resistiva Pura - Fase R
V1
A1
W1
VA1
VAR1
PF1
127,00
0,255
32,4
32,4
0,6
1
Carga Mista Indutiva - Fase S
V2
A2
W2
VA2
VAR2
PF2
127,07
0,191
16,7
24,3
17,5
0,691
Carga Indutiva Pura - Fase T
V3
A3
W3
VA3
VAR3
PF3
127,00
0,256
1,9
32,5
32,5
0,057
66
4.5.
Conclusões
Segundo (YOKOGAWA, 1996), o WT1030M apresenta os seguintes métodos e
fórmulas de cálculo, inclusive na ordem apresentada, ligação 3P4W:
Σ Potência ativa:
ΣW = W + W + W¨
(81)
ΣVA = VA + VA + VA¨
(82)
ΣVAr = VAr + VAr + VAr¨
(83)
/ = ÚF/ H − F/ H²
(84)
ΣPF = ΣÝÞ
(85)
Σ Potência aparente:
Σ Potência reativa:
Σ PF:
ΣÜ
Σ DEG (Phase Angle):
ΣDEG = cos G hΣÝÞk
ΣÜ
(86)
O erro no algoritmo dos somatórios e resultantes das medidas efetuadas ocorre no
cálculo da potência aparente, conforme mostra a equação abaixo e conforme se pode verificar
na tabela 3:
ΣVA = VA + VA + VA¨
(87)
A partir desse erro de “algoritmo de cálculo” implantado no medidor utilizado,
seguem-se errados os cálculos de:
Σ PF;
Σ DEG (Phase Angle);
Σ Potência Aparente.
67
5.
AUTOMAÇÃO DO PROCESSO COM LABVIEW
A sequência lógica seguida nesse trabalho (capítulo a capítulo) atendeu aos seguintes
itens: apresentação de revisão bibliográfica no que se refere ao processo de dedução de
modelo elétrico de máquinas assíncronas, com equacionamentos matemáticos, simplificações
coerentes e simplificadoras; questões relevantes sobre normalização de processos de ensaios
com dispositivos girantes baseados em efeito de indução magnética e desenvolvimento do
software segundo o equacionamento desenvolvido no próprio texto.
Seguindo um modelo mundialmente aceito para representação de máquinas de indução
trifásicas, o qual se apresentou na figura 5, pode-se partir do modelo dessa figura e se supor
ensaios elétricos destinados à obtenção dos parâmetros elétricos que reproduzem o mais fiel
quanto possível as características do dispositivo ensaiado. Para que o trabalho de obtenção de
modelos elétricos seja obtido, são necessários cuidados durante os procedimentos de testes.
Esses procedimentos encontram-se no capítulo 3, o qual apresenta questões normalizadas a
serem seguidas ou sugeridas para que os resultados sejam aceitos e obtidos em conformidade
com as normas regulamentadoras e padrões internacionais de qualidade.
A partir desse capítulo, nota-se claramente a necessidade de utilização de equipamento
de medição que tenha baixo erro durante as amostras das grandezas elétricas desejadas, ou
seja, que o equipamento de medição seja o mais exato quanto possível e com alto nível de
repetibilidade (precisão). Esse fato justifica a utilização do dispositivo descrito no capítulo 4,
mesmo com a detecção do erro no algoritmo de cálculo do mesmo, conforme se pode ver na
seção 4.4.2.
Respeitadas todas as orientações por parte das normas de ensaios de máquinas
elétricas, respeitado o algoritmo de obtenção dos parâmetros elétricos de máquinas de indução
(algoritmo equacionado e apresentado ao longo do capítulo 2) e, somando-se a esses dois prérequisitos para obtenção de um ótimo modelo elétrico equivalente, o conhecimento de nível
68
intermediário em plataforma LabVIEW, tem-se como resultado todo ferramental necessário à
criação de um sistema automatizado de obtenção de medidas elétricas durante os diversos
tipos de ensaios a que uma máquina de indução pode estar sujeita. Com o desenvolvimento de
um sistema de aquisição de dados automatizado, pode-se aperfeiçoar o processo de obtenção
de modelos, tornando-o mais rápido, por exemplo, e aumentar a precisão do modelo obtido.
A idéia consiste basicamente na utilização da plataforma LabVIEW para a obtenção
dos valores de tensão, corrente e potências, além da apresentação dos resultados em interface
amigável no que diz respeito ao controle pelo usuário e de fácil interação com o mesmo. Em
comunicação permanente com a plataforma encontra-se o medidor multifunção da
YOKOGAWA, o qual é responsável pela aquisição das medidas elétricas durante os ensaios.
Como resultado do processo de automação, tem-se um programa (ou, em outras palavras, um
Virtual Instrument) executando em ambiente Windows, comunicando via porta USB-GPIB e
gerando resultados numéricos das medidas efetuadas, sendo esse produto final gerado pelo
programa de automação compatível com planilhas eletrônicas de cálculo (Excel, mais
precisamente).
Antes da apresentação do algoritmo desenvolvido, apresenta-se um pouco sobre a
plataforma em que o Instrumento Virtual foi desenvolvido, para fins de justificativas de
utilização da plataforma no projeto desenvolvido e características do programa mais
tradicional da National Instruments.
5.1.
Plataforma LabVIEW
Com o propósito de desenvolver um sistema automatizado de ensaio de máquinas de
indução, considerando o equipamento multifunção apresentado no capítulo 4 (ou seja, o
WT1030M) e sua capacidade de comunicação com um microcomputador, optou-se pela
programação e desenvolvimento de VIs, constituindo um programa de automação destinado à
69
ensaios elétricos de máquinas de indução trifásicas, dando origem ao produto final que se
chama de Virtual Instrument (VI), o qual foi desenvolvido em plataforma LabVIEW para
atender à proposta do projeto desenvolvido.
Segundo (NI, 2009) o LabVIEW, acrônimo de Laboratory Virtual Instrument
Engineering Workbench, é um ambiente de programação gráfica usado por milhões de
engenheiros, estudantes e cientistas do mundo todo para desenvolver sofisticados sistemas de
medição, testes e controle de sistemas. A primeira versão surgiu em 1986 para o Macintosh e
atualmente existem também em ambiente Windows, Linux e Solaris. O processo de
desenvolvimento é feito usando-se linguagem gráfica intuitiva, baseada em ícones autoexplicativos e blocos lógicos. O software pode ser integrado com milhares de hardwares e
prover centenas de bibliotecas de funções para avançados sistemas de análise e visualização.
Todo programa em LabVIEW é chamado de Virtual Instrument ou simplesmente VI,
nome mundialmente difundido. Esses são compostos pelo painel frontal, que contém a
interface, e por um diagrama de blocos, que apresenta o código gráfico do programa
desenvolvido.
Os blocos são chamados de VIs. Isso ocorre porque cada programa (ou seja, Sub-VI)
pode ser utilizado por outros programas ou pode ser executado isoladamente, contendo
entradas e saídas ou produzindo saídas. Dada a utilização desse modelo de fluxo de dados, as
chamadas recursivas, ou seja, método pelo qual uma função pode chamar a si mesmo, não são
possíveis, podendo-se conseguir um efeito parecido com algum esforço de programação. O
programador pode ligar as VIs com linhas de ligação (wire) e define, desse modo, o fluxo de
dados. A execução de um VI começa quando todas as entradas estão disponíveis e o(s)
resultado(s) do processamento (é)são colocado(s) na(s) saída(s) assim que a execução do subprograma tenha terminado. Não existe uma ordem pré-definida, ou seja, não se pode exigir a
execução da esquerda para a direita dentro de uma VI ou Sub-VI. O resultado mais importante
70
da regra acima consiste na facilidade de processamento em paralelo de subprogramas no
programa LabVIEW, desde que uma VI não dependa dos resultados ou saídas de uma VI em
execução. Sobre os VIs ditos como normais, estes podem ser manipulados e adaptados pelo
programador.
Porém, todos os VIs se baseiam em uma série de funções básicas chamadas de
“primitivas”, que não podem ser modificadas. Por outro lado, muitas dessas funções básicas
são polimorfas, ou seja, a sua funcionalidade se adapta ao tipo de dados de entrada, quando
ocorre a ligação de um fio de ligação (wire). Pode-se citar a função Build-Array, a qual
poderá ser utilizada para strings, inteiros, funções arrays e clusters. Pode-se criar também VIs
polimorfas. Qualquer dado pode ser ligado ao painel frontal através de indicadores do tipo
LED, por exemplo, ou mesmo displays de strings ou números.
Sintetizando as vantagens em se utilizar a plataforma LabVIEW, apresenta-se:
Criação de componentes que executam em paralelo;
Programação gráfica;
Possibilidade de representação de data-flow;
I/O e comunicação, que permite comunicação com sensores, instrumentos e
drivers;
Plug-and-Play Hardware, que permite a utilização de dispositivos ligados à USB,
GPIB, PCI, Wi-Fi, Ethernet;
Apresentação de gráficos, controles e visualizações em 3D;
Utilização de indicadores de posição, níveis de determinada grandeza;
Compatibilidade com ambientes operacionais Windows, Linux, Mac, outros;
Reutilização de VIs e Sub-VIs.
Sintetizando as desvantagens de utilização do LabVIEW quando comparado com
programação em texto, apresenta-se:
71
Pequenas mudanças podem conduzir a profundas reestruturações do programa,
uma vez que sempre que se insere um novo bloco é necessário voltar a ligar os fios
e os símbolos para restabelecer o funcionamento normal;
Para evitar confusões de linhas, os conhecidos wires, é habitual introduzir mais
variáveis do que aquelas que são estritamente necessárias, diminuindo-se assim a
velocidade de programação e contrariando-se, de algum modo, o modelo de fluxo
de dados.
5.2.
Virtual Instrument Desenvolvido
Um software em plataforma LabVIEW foi desenvolvido como parte importante desse
projeto. No contexto de ensaio de máquinas de indução, a obtenção do modelo elétrico da
máquina ensaiada consiste o principal objetivo. Com um modelo elétrico de qualidade, obtido
a partir de procedimentos coerentes, normalizados e com equipamentos de qualidade, pode-se
simular a máquina ensaiada como um gerador de indução. Esse gerador poderá ser
“simulado” em função da variação do escorregamento e a partir do modelo elétrico
equivalente da máquina. O software apresenta-se como solução para amenizar todas as
dificuldades técnicas de obtenção de um modelo elétrico. Dentre essas dificuldades
amenizadas está a questão de simultaneidade na obtenção das medidas elétricas a partir de
wattímetros comuns. A utilização de um equipamento por si só já resolve tal problema, uma
vez que a medição simultânea das grandezas é uma das características. Outra dificuldade que
se verifica pelo método convencional de ensaio é a necessidade da anotação dos valores “à
mão”, o que implica a realização posterior de cálculos manuais (ou em planilha Excel) para a
obtenção do modelo (isso se o responsável pelos cálculos conhecer os procedimentos e
sequência de cálculo a fazer).
Com a utilização do software desenvolvido, não só o usuário poderá obter o modelo
elétrico com alguns “cliques” do mouse e com um conhecimento elementar como ainda
72
poderá gerar gráficos (com grandezas a sua escolha, quantas vezes quiser) simulando a
máquina como gerador, isso sem falar da possibilidade de salvar uma planilha em Excel com
as grandezas simuladas do comportamento como gerador de indução para sua posterior
manipulação ou para montagem de arquivo técnico da máquina ensaiada.
O software se verifica de fácil utilização e toda a sua descrição encontra-se, conforme
já mencionado, no anexo B desse trabalho. A seguir uma breve apresentação da estruturação
do software desenvolvido.
Uma hierarquia é fornecida pela ferramenta LabVIEW no que diz respeito aos Virtual
Instruments presentes no software, bem como suas ligações e demais informações. Essa
hierarquia é mostrada na figura abaixo e funciona como um fluxograma dos dados a partir do
VI que se nomeou como sendo MAIN.
Figura 13 – Hierarquia do software desenvolvido em LabVIEW
Cada VI foi detalhado, conforme as interligações apresentadas acima, no anexo B e
informações sobre os blocos funcionais são dadas ao longo do texto. Figuras foram utilizadas
para a apresentação dos algoritmos de cálculo.
O fluxograma de operação do sistema desenvolvido apresenta os seguintes itens:
73
a) o usuário monta o circuito conforme o tipo do ensaio (vide no capítulo 6 desse
documento) com os equipamentos mínimos necessários para a efetivação das
medições e conecta o multimedidor WT1030M ao computador via adaptador GPIB
para USB;
b) o ensaio se inicia e o usuário só precisa executar o VI MAIN para que o software
assuma o controle do medidor da YOKOGAWA;
c) as configurações de escalas (AUTO=default) para tensões, correntes e potências
podem ser re-configuradas pelo usuário;
d) para cada ensaio pode ser configurado formas de amostragem. Por exemplo: se for
interessante que sejam feitas no mínimo 10 amostras sendo que para cada amostra 5
medidas deverão ser feitas (para se poder gerar uma média dos valores
posteriormente) basta o usuário configurar o número de amostras (5, para o exemplo)
e dar amostrar 10 vezes. No total se terá uma matriz com 50 linhas de valores com 21
colunas de grandezas medidas por cada uma das amostras efetuada;
e) depois de finalizado o ensaio, basta o usuário salvar a planilha, a qual será em formato
compatível com Microsoft Office (Excel) e realizar os outros dois ensaios
mencionados anteriormente (de rotor bloqueado e o de velocidade síncrona).
f) De posse dar três planilhas salvas, basta que elas sejam importadas de volta ao
software;
g) Por fim, o usuário poderá gerar gráficos ou obter o modelo elétrico da máquina.
A figura a seguir apresenta a tela inicial do software que se chama Main.vi. Essa será a
plataforma de operação do usuário e dela derivam todas as opções.
74
Figura 14 – Front Panel de MAIN.vi
75
6.
PROCEDIMENTOS REALIZADOS PARA VALIDAÇÃO
6.1.
Ensaio de máquina de indução trifásica
A máquina de indução utilizada nesse primeiro ensaio foi uma máquina trifásica, do
fabricante EBERLE, que apresenta como dados de placa os dados apresentados na figura
abaixo.
Figura 15 – Dados de placa de motor de indução trifásico
6.2.
Ensaio a vazio
Em conformidade com o recomendado pelo fabricante, com o intuito de minimizar a
circulação de correntes harmônicas nos enrolamentos do motor, a ligação em estrela foi a
escolhida. A rede elétrica do laboratório de máquinas elétricas da UFRGS (LMEAE) fornece
apenas 220V de linha. Com o objetivo de limitar a corrente a um valor mais prático de ensaio
utilizou-se um banco de transformadores monofásicos (equivalente a um transformador
trifásico) capaz de suprir a tensão de 380V de linha e a corrente resultante e necessária ao
ensaio. Desta forma, a topologia apresentada na figura abaixo foi montada a fim de realização
do ensaio a vazio.
76
Figura 16 – Circuito montado para o ensaio a vazio com valores importantes
Os materiais, instrumentos e utilitários usados para esse ensaio foram:
Fonte de alimentação trifásica (rede concessionária);
Transformadores de corrente na relação de 10 A para 5 A;
Três bancos de transformadores monofásicos para alimentação trifásica
(220V/380V);
Wattímetro WT1030M;
Cabos elétricos e conectores para conexões elétricas;
Cabos de comunicação GPIB entre multimedidor WT1030M e computador;
Software desenvolvido em LabVIEW.
Devido à reatância de dispersão do banco de transformadores, mesmo com a adequada
ligação das bobinas, conseguiu-se um valor de tensão um pouco abaixo do esperado (ou seja,
dos 220V por fase).
Foram efetuadas 5 medições de 19 grandezas elétricas para cada fase e as médias dos
resultados obtidos estão apresentadas na tabela abaixo.
77
Tabela 5 – Valores resultantes do Ensaio a Vazio
Ensaio a vazio
R
S
T
Tensão Média (V)
Corrente Média (A)
Potência Ativa Média (W)
Potência Reativa Média (Var)
194,703
8,699
284,175
1.669,83
194,503
9,00625
157,075
1.744,2
193,573
8,44625
231,1
1.618,5
Os resultados desse ensaio serão sintetizados no próximo capítulo (capítulo 7) e
serão relacionados aos resultados obtidos a partir do software desenvolvido (ou seja, se terá
como resultado principal o modelo elétrico da máquina em questão, valores calculados com o
modelo e simulação da máquina operando como gerador).
6.3.
Ensaio de rotor bloqueado
O ensaio de rotor bloqueado ou travado de um motor de indução fornece
informações sobre as impedâncias de dispersão e sobre as perdas ôhmicas dos enrolamentos.
O rotor é bloqueado, de modo que não possa girar (sendo o escorregamento, portanto, igual à
unidade), e tensões polifásicas equilibradas são aplicadas aos terminais do estator
(FITZGERALD, 2004). A topologia da figura 17 foi utilizada para o ensaio de rotor
bloqueado.
Figura 17 – Circuito montado para o ensaio de rotor bloqueado
78
Os materiais, instrumentos e utilitários usados para esse ensaio foram:
Fonte de alimentação trifásica (rede concessionária);
Transformador trifásico (220V/46V);
Wattímetro WT1030M;
Cabos elétricos e conectores para conexões elétricas;
Cabos de comunicação GPIB entre multimedidor WT1030M e computador;
Software desenvolvido em LabVIEW.
Foram efetuadas 5 medições de 19 grandezas elétricas para cada fase e as médias dos
resultados obtidos estão apresentadas na tabela abaixo.
Tabela 6 – Valores médios resultantes do Ensaio de Rotor Bloqueado
Ensaio de rotor bloqueado
R
S
T
Tensão Média (V)
25,5395
25,643
25,96775
Corrente Média (A)
21,28
21,2675
20,9225
Potência Média (W)
Pot. Reativa Média (Var)
181,55
175,875
178,875
512,275
516,25
513,025
Os resultados desse ensaio serão sintetizados no próximo capítulo (capítulo 7), da
mesma forma que o ensaio a vazio.
6.4.
Medição de resistência ôhmica
Efetua-se esta medida logo após os testes anteriores, pois a resistência do estator
varia sensivelmente de acordo com a temperatura de operação. Neste momento a temperatura
do estator está próxima à de operação. Como os ensaios a vazio e a rotor bloqueado foram
realizados em dias diferentes, optou-se pela medição em temperatura ambiente e se efetuou a
correção deste valor para uma determinada temperatura (AMERICAN NATIONAL
STANDARDS INSTITUTE, 2004) estimada para operação como gerador.
79
Os valores medidos por fase estão apresentados na tabela abaixo.
Tabela 7 – Valores de resistência do estator (bobina a bobina)
MEDIDAS DA RESISTÊNCIA DO ESTATOR (âÈ ) ( mΩ ) para 26°C
W-Z
U-X
Y-V
187,3
189,1
187,1
186,6
188,3
187,5
187,5
187,5
187,6
187,1
189,7
188,0
186,8
185,5
187,5
187,1
187,1
187,1
Média:
187,1
187,8
187,5
Segundo (SANTOS, 2003) uma estimativa de temperatura nos enrolamentos do
estator, medida em condições nominais, é em torno de 66º. Portanto, calcula-se o valor para
as resistências estatóricas para cada fase da máquina, que é apresentado pela tabela a seguir.
Tabela 8 – Valores de resistência do estator (bobina a bobina) corrigidos para 66°C
ESTIMATIVA DA RESISTÊNCIA DO ESTATOR (âÈ ) ( mΩ ) para 66°C
W-Z
U-X
Y-V
215,7743
216,6585
216,2356
Com isso, $ (média das três bobinas monofásicas) é igual a 0,2162 Ω . Também se
poderia ter feito as medições de resistência com a colocação da máquina em condições
nominais de operação. Com isso se teriam os valores de $ de forma mais coerente. Porém,
dada a potência da máquina ensaiada (15kW) se verificou de difícil colocação em carga
nominal no laboratório. Daí a justificativa da aproximação.
Os resultados desse ensaio serão sintetizados no próximo capítulo (capítulo 7), da
mesma forma que o ensaio a vazio e bloqueado.
6.5.
Ensaio de velocidade síncrona
Através do auxílio de uma máquina primária, coloca-se a máquina de ensaio na
velocidade síncrona (s=0) com a intenção de “desacoplar” o circuito equivalente ao rotor.
80
A topologia da figura 18 foi utilizada para o ensaio de rotor bloqueado. A figura 18
mostra o circuito equivalente do ensaio de velocidade síncrona.
Figura 18 – Circuito montado para o ensaio de velocidade
Figura 19 – Circuito equivalente do ensaio de velocidade
Os materiais, instrumentos e utilitários usados para esse ensaio foram:
Inversor de frequência da Danfoss (configurado para satisfazer as condições de
torque da máquina primária) destinado ao controle da máquina primária;
Wattímetro WT1030M;
81
Cabos elétricos e conectores para conexões elétricas e cabos de comunicação
GPIB entre multimedidor WT1030M e computador;
Software desenvolvido em LabVIEW;
Máquina primária funcionando como motor de indução.
Foram efetuadas 5 medidas de 19 grandezas elétricas por cada fase e as médias
dos resultados obtidos são apresentados na tabela abaixo.
Tabela 9 – Valores médios resultantes do ensaio de Velocidade Síncrona
6.6.
Ensaio de velocidade síncrona
R
S
T
Tensão Média (V)
Corrente Média (A)
Potência Média (W)
Pot. Reativa Média (Var)
212,11
10,412
280
2191
211,04
9,67
112
2038
211,49
9,36
159
2104
Utilização dos procedimentos normalizados de cálculos
Segundo o Método 7 (ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS,
2002), um circuito equivalente com valor assumido das perdas suplementares poderá ser
obtido. Seguindo o procedimento da norma, um ensaio a vazio da máquina com variação da
tensão desde 125% da tensão nominal até o ponto onde a continuação da redução da tensão
acarretasse o aumento da corrente, conforme itens 14.3.3, item 14.3.3.1 e 14.3.3.2 de
(ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS, 2002), deveria ser feito para que
se pudesse “separar” as perdas por atrito e ventilação das perdas do núcleo. O que deveria ser
feito segue abaixo.
O valor da potência de entrada menos a perda I²R no estator versus a tensão deve ser
colocada num gráfico, e a curva obtida é estendida até a tensão zero. A interseção com o eixo
das ordenadas para tensão zero é a perda por atrito e ventilação. A interseção pode ser
determinada com mais precisão se os valores de potência de entrada menos a perda I²R no
estator forem colocados num gráfico versus a tensão ao quadrado para valores na faixa de
82
menor tensão. Um exemplo é a curva tracejada da figura 8, anteriormente mostrada. As
perdas do núcleo seriam obtidas da simples subtração das perdas totais a vazio das perdas
por atrito e ventilação. Porém o ensaio não foi realizado e essa separação não pode ser feita.
6.6.1.
Perdas Suplementares
Nenhum procedimento foi executado nos ensaios visando obter tais perdas. Isso não
pode nem sequer ser cogitado porque tanto na medição de forma direta como na indireta,
condições de carga variando de 25% da carga nominal até 150% da carga nominal deveriam
ser aplicadas à máquina ensaiada. Com isso se poderia, via formulação, obter as perdas
suplementares.
Pode-se assumir, segundo a norma, a perda suplementar para uma máquina de 15kW
como sendo 1,8% do valor de potência nominal de saída da máquina.
6.6.2.
Ensaio com o Rotor bloqueado
Ensaio realizado em conformidade com a norma, a menos de medição da temperatura
com termopares nos enrolamentos (lugares estratégicos).
6.6.3.
Metodologia e Formulário número 5 da NBR 5383
Não se conseguiu efetuar o cálculo das perdas de núcleo separadamente, conforme já
mencionado na seção 2.2. Essa separação é pedida e utilizada no cálculo de $ . Porém, se
utilizou o valor de perda de núcleo obtido a partir do ensaio de velocidade para que se
pudesse calcular o valor estimado de $ .
83
7.
RESULTADOS ALCANÇADOS
Utilizando-se os procedimentos normalizados estabelecidos nas normas específicas
para ensaios de máquinas de indução e o software de aquisição de medidas elétricas,
manipulação dos valores mensurados e gerador do modelo equivalente em LabVIEW, onde se
pode salientar a capacidade de geração de gráficos que simulam a operação da máquina de
indução ensaiada em operação como gerador pelo software já apresentado no capítulo 5,
efetuou-se os ensaios de uma máquina de indução trifásica para validação dos procedimentos
normalizados apresentados nesse trabalho e também para a validação dos resultados obtidos
pelo software criado.
7.1.
Resultados do ensaio de máquina de indução
A obtenção do modelo elétrico considerando a resistência que representa a parcela de
perdas no núcleo ($# ) consiste em um importante resultado. A partir desse resultado derivam
outros resultados não menos importantes. A simulação da máquina operando como gerador de
indução trifásico, seus gráficos de rendimentos em função da velocidade, seus gráficos de
potência de eixo em função do escorregamento ou velocidade e a curva de conjugado em
função da velocidade são importantes resultados e de fácil visualização por parte do usuário
do software desenvolvido.
Nesse contexto, o próprio software desenvolvido (que se encontra operacional e ativo)
se verifica como um sucesso obtido com o desenrolar desse projeto. Porém, como o software
se encontra documentado e explicado no anexo B, não se apresentarão maiores detalhes sobre
ele.
A questão da correção via software de uma falha de algoritmo implementado no
multimedidor de grandezas e sua detecção foi um resultado positivo para futuros ensaios e
para que se garanta a integridade e veracidade das informações, tornando-as confiáveis e sem
84
que haja a necessidade de intervenção manual do usuário para cálculo corretivo das grandezas
problemáticas (vide anexo A, em conclusões).
Então, sintetizando, antes de se apresentarem os resultados de forma prática (gráficos,
planilhas e algoritmo), reúne-se a seguir os principais resultados obtidos pelo trabalho de
pesquisa e desenvolvimento praticado. São eles:
obtenção do modelo elétrico na sua forma mais prática orientada na literatura,
ou seja, considerando a resistência que representa as perdas no núcleo por
correntes parasitas e de Focault;
obtenção de planilhas em formato xls (Excel) contendo informações sobre
potências, corrente, escorregamento, velocidade, rendimento, conjugado e fator
de potência da máquina ensaiada (a partir do resultado citado acima, ou seja, a
partir do modelo) funcionando como gerador de indução trifásico;
obtenção de curvas de conjugado, rendimento, potências em função de oito
outras grandezas e possibilidade de combinações entre essas grandezas. Dentro
desse resultado, salienta-se a possibilidade de se gerar dois gráficos
simultaneamente e a possibilidade de salvá-los em formado JPG (arquivo de
imagem);
correção via software de algoritmo falho do medidor de grandezas elétricas
WT1030M da YOKOGAWA, o que torna o sistema confiável no que diz
respeito à qualidade das leituras praticadas e manipuladas pelo software;
desenvolvimento de uma sequência de cálculo dos parâmetros elétricos da
máquina de indução ensaiada considerando a resistência chamada de “ferro”
no equacionamento (ver na seção 3.5 referente à obtenção dos parâmetros
elétricos), sem muitas aproximações que são comumente praticadas como em
(FITZGERALD, 2004);
85
utilização de um ensaio pouco utilizado em ambientes de laboratório de
máquinas de Universidades que consiste no ensaio à velocidade síncrona, que
fornecerá informações sobre as perdas ôhmicas do estator e sobre as perdas no
núcleo do estator.
Para o ensaio praticado para fins de validação de software e utilização das informações
sintetizadas nesse documento no que diz respeito aos procedimentos indicativos de ensaio,
cuidados e informações extras se utilizou a máquina de indução com as características já
mencionadas anteriormente.
Alguns resultados a que se chegou com o trabalho são os que se seguem.
7.2.
Modelo Elétrico
O modelo elétrico obtido está apresentado na figura abaixo.
Figura 20 – Circuito equivalente do ensaio de velocidade (software LabVIEW)
86
7.3.
Planilhas com valores calculados
A figura seguinte apresenta uma imagem das matrizes de 2000 colunas cada uma delas
que foram calculadas pelo software utilizando os parâmetros elétricos obtidos acima. A posição
da matriz selecionada, ou seja, a posição “1022”, correspondente aos valores nominais da
máquina ensaiada. Tal informação pode ser extraída ao se observar as informações de placa da
máquina, tal como a velocidade de 1760 RPM em condições nominais.
Figura 21 – Circuito equivalente do ensaio de velocidade (software LabVIEW)
87
Uma planilha de 2000 linhas também foi gerada contendo todos os valores acima,
organizados por colunas (cada grandeza em uma das colunas) em formato Excel, mas não será
apresentada aqui por questões de síntese.
7.4.
Gráficos típicos
As figuras a seguir apresentam alguns dos gráficos gerados para a máquina ensaiada.
Figura 22 – Gráfico de conjugado (N.m) versus velocidade (RPM)
Figura 23 – Gráfico de conjugado (N.m) versus escorregamento (software LabVIEW)
7.5.
Resultados comparativos com normas
Chegou-se a uma tabela contendo informações dos valores obtidos pela utilização dos
procedimentos normalizados (através do FORMULÁRIO Cinco) onde todos os valores
obtidos dos ensaios foram utilizados para os cálculos a mão e pelo software. Porém, quando
88
se chegou ao ponto de se calcular o >+* e o +* não se conseguiu obter o valor ã , pois esse
dependia da utilização de + (que representa a potência por ventilação e atrito, em Watts). O
que se fez foi utilizar a fórmula sugerida em norma sem que se se subtraísse a parcela de
perdas por atrito e ventilação, ou seja, + .
A tabela abaixo mostra os resultados comparativos.
Tabela 10 – Valores médios resultantes do ensaio de Velocidade Síncrona
Procedimentos
Parâmetros Normalizados
NBR 5383
R1
X1
Xm
Rc
R2
X2
0,2162
0,5815
21,9258
174,6808
0,1911
0,5815
Software
LabVIEW
Diferença
0,2162
0,5818
21,5040
157,7840
0,1933
0,5818
0,00%
0,04%
-1,92%
-9,67%
1,16%
0,04%
A tabela mostra que o desvio máximo produzido com a utilização do software
desenvolvido no LabVIEW para utilização na obtenção de modelos elétricos de máquinas de
indução foi menor do que 10% para uma das grandezas obtidas, ou seja, referente ao
parâmetro que corresponde às perdas no ferro.
Porém, com a correta separação das perdas por atrito e ventilação das do núcleo,
conforme o sugerido em (ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS, 2002),
e baseado nos erros máximos produzidos nas outras grandezas (máximo de 1,92% para a
reatância de magnetização) uma maior precisão será obtida para tal valor de 9,67%.
89
CONCLUSÃO
O trabalho desenvolvido ao longo de um ano produziu importantes resultados no
processo de ensaio de máquinas de indução e, por isso, atingiu os objetivos principais a que se
destinou desde o princípio. O software ficou de fácil utilização, otimizado e auto-explicativo.
O processo de obtenção de modelos equivalentes elétricos para máquinas de indução
encontrou um grande facilitador com as ferramentas utilizadas nesse projeto, o que contempla
o multimedidor WT1030M e sua possibilidade de comunicação com microcomputadores via
GPIB-USB, a própria plataforma LabVIEW e os equipamentos elétricos importantes para a
montagem dos três ensaios mínimos necessários para a obtenção dos parâmetros elétricos de
qualquer máquina de indução, onde se destaca o ensaio a vazio, o ensaio de rotor bloqueado e
o ensaio de velocidade.
Se todas essas ferramentas forem agregadas de forma inteligente se terá uma bancada
de ensaio de máquinas elétricas de indução, que poderá ser utilizado pelo Laboratório de
Máquinas Elétricas, Acionamento e Energia da UFRGS e até por outras Universidades que
tenham em sua grade curricular as disciplinas de Máquinas Elétricas ou assemelhadas. Aulas
práticas poderiam ser programadas e executadas de forma ágil, eficiente e com uma ótima
precisão (o que não acontece até os dias atuais nos laboratórios).
Ficam algumas sugestões para melhoria desse projeto desenvolvido até agora que, de
certa forma, foi criado para que seja uma ferramenta utilizada pela UFRGS em seu laboratório
de Máquinas Elétricas e em suas necessidades de modelagem de dispositivos rotativos de
indução. Nessa linha de raciocínio, sugere-se a sequência dos trabalhos no que diz respeito à
alteração do presente software para comportar ensaios de máquinas síncronas da mesma
forma que foi abordado para máquinas de indução.
Outra idéia importante que seria interessante desenvolver seria a extensão do
programa para outros medidores de grandezas (podendo ser uma família mais ampla) da
90
YOKOGAWA, por exemplo, onde se configuraria o tipo de medidor que se está utilizando e
que houvesse compatibilidade com o software. A partir desse ponto o software começaria a
ganhar uma abrangência maior e sairia da exclusividade de uso do WT1030M, o qual já se
encontra “obsoleto” se comparado com modelos mais atuais do mesmo fabricante.
Sugere-se também a utilização de dispositivos medidores de conjugado e de
velocidade ligados à máquina ensaiada e conectados ao multimedidor, principalmente um
medidor de velocidade. Isso ajudaria significativamente o monitoramento da velocidade no
ensaio à velocidade síncrona e evitaria o uso de dispositivos manuais (tacômetros) que
representam grande fonte de erro não sistemático no processo, uma vez que qualquer
mudança no alinhamento do eixo do tacômetro em relação ao eixo da máquina ensaiada já
pode ser fonte de erro considerável da velocidade nominal do dispositivo.
Outra sugestão que está amparada por normas diz respeito à medição da resistência de
estator da máquina elétrica de indução sob teste com o método da queda de tensão. Uma fonte
de tensão seria ligada (ou fonte de corrente) aos terminais da máquina e, com a corrente
circulando pelo enrolamento de estator, o multimedidor poderia estar monitorando esses
valores de correntes, tensões e potências. Isso deveria ser programado em software como se
fosse um novo ensaio, um ensaio que se poderia chamar de Ensaio de Resistência, por
exemplo. O usuário ligaria a fonte de corrente em série com a entrada de corrente do
WT1030M (respeitando os 20 A máximos) e essa fonte estaria ligada em série com uma das
bobinas do estator da máquina. A amostra de tensão seria retirada dos terminais da bobina que
foi posta em série com a fonte e como medidor.
Um teste que se poderia realizar seria a comparação entre a medição de resistência a
partir do método de queda de tensão com os valores obtidos pelo método da medição a 4 fios
Se o erro fosse tolerável entre o resultado a quatro fios e o método da queda de tensão, todo o
91
ensaio de uma máquina de indução seria feito utilizando somente o WT1030M como fonte de
medidas elétricas necessárias (sem que se precise de um multímetro a quatro fios).
Outra idéia para o caso de uma montagem de bancada profissional para ensaio de
máquinas, automatizada e eficiente seria a adaptação de um sensor de temperatura de fácil
instalação em algum ponto da máquina para que se monitorem as elevações de temperatura.
Isso seria útil caso a idéia de medir a resistência usando o WT1030M fosse empregada, uma
vez que o valor da temperatura do enrolamento seria necessário para a correção dos valores de
resistências (para o caso de não possibilidade de colocação em condição nominal de carga
para que se efetue essa medida ou medidas).
92
REFERÊNCIAS BIBLIOGRÁFICAS
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR-7094: Máquinas Elétricas
Girantes – Motores de Indução Trifásicos - Especificação. Rio de Janeiro, 1996. 50 p.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR-7094: Máquinas Elétricas
Girantes – Motores de Indução Trifásicos - Especificação. Rio de Janeiro, 2000. 5 p.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR-5383-1: Máquinas
Elétricas Girantes – Parte 1: Motores de Indução Trifásicos - Ensaios. Rio de Janeiro, 2002,
62 p.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR-7094: Máquinas Elétricas
Girantes – Motores de Indução Trifásicos - Especificação. Rio de Janeiro, 2003. 6 p.
AMERICAN NATIONAL STANDARDS INSTITUTE. ANSI/IEEE Std 118: IEEE
Standard Test Code for Resistance Measurement. New York, 1978. 31 p.
AMERICAN NATIONAL STANDARDS INSTITUTE. ANSI/IEEE Std 112: IEEE
Standard Test Procedure for Polyphase Induction Motors and Generators. New York, 2004.
79 p.
AYASUN, S; NWANKPA, C. O. IEEE Transactions on Education, vol. 48, no. 1: Induction
Motor Tests Using MATLAB/Simulink and Their Integration into Undergraduate Electric
Machinery Courses. 2005. p. 37-47. Disponível em: < http://ieeexplore.ieee.org/stamp/stamp.
jsp?tp= &arnumber=1393102&isnumber=30321>. Acesso em: 30 ago. 2009.
BELUCO, A. Viabilidade De Microcentrais Hidrelétricas Baseadas no Emprego de
Equipamentos de Mercado. 1994. 170 p. Dissertação de Mestrado - Escola de Engenharia,
Universidade Federal do Rio Grande do Sul, Porto Alegre, 1994.
CHAPALLAZ, J.M et al. Manual on Induction Motors Used As Generators. MHPG
Series. Vol. 10. Germany: Fried. Vierweg & Sohn Verlagsgesellschaft mbH, 1990. 221 p.
ISBN: 3-528-02068-7.
CHAPMAN, S. J. Electric Machinery Fundamentals. 2nd ed.. United States of America:
McGraw Hill series in electrical engineering Power and Energy, 1991. 771 p. ISBN: 0-07010914-1.
FITZGERALD, A. E. et al. Electric Machinery. New York: Mcgraw-Hill, 1990. 599 p.
ISBN: 0-07-021134-5.
FITZGERALD, A.E.; KINGSLEY Jr. C.; UMANS, S.D. Máquinas Elétricas. Com
introdução à eletrônica de potência. 6th ed.. Porto Alegre: Bookman, 2006. 648 p. ISBN:
007-3660094.
93
HEWLETT PACKARD. User’s Guide: HP Models 6814B and 6834B AC Power
Source/Analyzers. Hewlett Packard. 1nd ed.. United States of America, 1996. Microfiche
Part No. 5962-0888.
HINDEMARSH, JOHN. Electrical Machines and their Applications. 4 th ed.. England:
Butterworth Heinemann, 1984. 662 p. ISBN: 0-7506-2794-8.
KRAUSE, C. PAUL; WASYNCZUK, O; SUDHOFF, S.D. Analysis of Electric Machinery
and Drive System. 2 th ed.. United States of America: Wiley-Interscience publication
(Wiley-IEEE Press), 2002. 614 p. ISBN: 0-471-14326-X.
LabVIEW 7.1. LabVIEW™ HELP. National Instruments. United States of America:
March 2004 Edition. Part Number: 370117D-01.
NI. What Is LabVIEW. Disponível em:<http://www.ni.com/labview/whatis/>. Acesso em:
06 set. 2009.
SANTOS, S. Implantação de Microcentrais Hidrelétricas Automatizadas com o emprego de Geradores De indução. 2003. 114 p. Dissertação de Mestrado (Mestrado
Engenharia Elétrica), Universidade Federal do Rio Grande do Sul, Porto Alegre, 2003.
SHINDO, R. Cálculo de parâmetros de motor de indução trifásico Utilizando o método
dos elementos finitos. 2003. 165 p. Tese (Mestrado Engenharia Elétrica), Universidade
Federal do Rio de Janeiro, COPPE, 2003.
YOKOGAWA. Digital Power Meter: User´s Manual: WT1030/WT1030M. Yokogawa
Electric Corporation. 1nd ed.. Tokio, 1996. IM 253620-01E.
IWASE, H. et al. Yokogawa Technical Report English Edition: MODELS
WT1010/WT1030/WT1030M DIGITAL POWER METERS. N° 23. 1997. p. 9-11.
Disponível em: < http://search.yokogawa.com/query.html?qt=WT1030&ct=1369374900&la=
en&col=gtop&x=4&y=4>. Acesso em: 02 set. 2009.
WAGNER, C. F. Self Excitation of Induction Motors. Vol. 58.. AIEE Transactions on
Electrical Engineering, February 1939. P. 47-51.
94
ANEXOS
ANEXO A – Ensaio com Medidor YOKOGAWA WT1030M e Fonte HP6814B AC
Source/Analyser
ANEXO B – Descrição do software desenvolvido em LabVIEW
ANEXO C – Resoluções e Precisões
ANEXO A
Ensaio com Medidor YOKOGAWA WT1030M
e
Fonte HP6814B AC Source/Analyser
2
Sumário
1.
2.
2.1.
2.2.
2.3.
2.4.
3.
4.
4.1.
5.
6.
6.1.
6.2.
OBJETIVO ........................................................................................................... 4
CIRCUITO E DEFINIÇÕES .............................................................................. 4
Tensão de alimentação ......................................................................................... 4
Impedâncias .......................................................................................................... 5
Correntes [A]......................................................................................................... 5
Potências ................................................................................................................ 6
Valores calculados teóricos .................................................................................. 8
PROCEDIMENTOS DE ENSAIO E RESULTADOS ...................................... 9
Procedimentos do ensaio ...................................................................................... 9
RESULTADOS ................................................................................................... 10
ANÁLISE DOS RESULTADOS ....................................................................... 12
Cálculos efetuados pelo WT1030M na função somatório (Σ)......................... 12
COMPARAÇÕES entre equipamentos ............................................................ 13
3
Lista de Figuras
FIGURA 1 - CIRCUITO ELÉTRICO MONTADO .............................................................................................................. 4
FIGURA 2 - TRIÂNGULO DE POTÊNCIAS..................................................................................................................... 6
FIGURA 3 – TRIÂNGULO DE POTÊNCIAS OBTIDO ....................................................................................................... 8
FIGURA 4 – CIRCUITO COM LIGAÇÃO DO WT1030M INDICADA (3-PHASE, 4-WIRE) ................................................. 9
4
1.
Objetivo
Com o intuito de descobrir a forma de medição de potências do medidor de grandezas da Yokogawa
WT1030M, quando utilizado para medição de cargas trifásicas desequilibradas, realizou-se um ensaio com
cargas conhecidas e determinadas, seguido de cálculo matemático de grandezas a serem avaliadas e
posteriormente medidas usando o WT1030 para comparação das medidas. Após, chegaremos a conclusões sobre
a forma de medir do equipamento quando comparado com métodos usando álgebra vetorial e cálculos simples.
Para confrontar os resultados medidos pelo medidor WT1030M e validar a forma de cálculo se utilizou como
fonte de tensão AC a fonte HP 6814B AC Power Source/Analyser que, além de fornecer uma tensão
configurável, efetua medidas de potências, tensão e corrente.
A dedução das equações e o circuito montado serão apresentados a seguir. Os resultados obtidos e
ligações elétricas serão também apresentados nesse anexo A.
2.
Circuito e definições
O circuito montado está apresentado na figura 1 (ligação em estrela).
Figura 1 - Circuito elétrico montado
As grandezas definidas e utilizadas para efetuar as medidas de potência são:
2.1.
Tensão de alimentação
Conforme já mencionado no objetivo, a tensão trifásica à alimentação das cargas mostradas na figura 1
foi fornecida pela fonte HP 6814B AC Power Source/Analyser. Com a utilização do User’s Guide, baseado nas
características da fonte e informações relevantes, se procedeu à configuração da tensão de alimentação conforme
a guia Examples of Front Panel Programming, situado no manual User’s Guide, na seção Front Panel
Operation 4-12 até 4-14. Tais configurações incluíram a configuração do módulo da tensão, frequência e
proteções do dispositivo, baseado em cálculo de correntes do circuito, posteriormente apresentados.
Porém, como a fonte já nos apresenta uma configuração default, que consiste em saída com 60 Hz,
forma de onda senoidal e módulo (amplitude da tensão) de zero V RMS. Porém não temos saída de tensão assim
que ligamos a fonte, uma vez que a saída encontra-se OFF, mostrado no display, o qual deverá estar ON para
que a saída apresente a tensão configurada. O procedimento de configuração foi basicamente baseado em
alteração da amplitude da tensão e das proteções do dispositivo.
5
Tensão configurada:
Módulo de 127 V rms;
Frequência de 60 Hz;
Proteção contra sobrecorrente de 0,5 A (vide User’s Guide, Front Panel Operation 4-7);
Forma de onda senoidal, defasadas no tempo em 120°, seguindo a sequência R, S e T.
A tensão trifásica aplicada ao circuito, dada em Volts RMS, é definida vetorialmente como:
= ∠0°
= ∠120°
= ∠240°
2.2.
[1]
[2]
[3]
Impedâncias
As impedâncias, dadas em ohms, são definidas como segue abaixo.
2.2.1.
2.2.2.
Impedância :
= ∠0°
[4]
= + [5]
Impedância :
Escrevendo a impedância de forma equivalente, teremos que:
2.2.3.
= + ∠ °
Impedância :
= ∠90°
2.3.
Correntes [A]
2.3.1.
Corrente :
! =
&
|#
$% |
'
∠0°
[6]
[7]
[8]
Simplificando a expressão, chega-se a
! =
2.3.2.
Corrente :
! =
&
|#
(% |
)*
#
'
[9]
∠120° − °
[10]
∠120° − °
[11]
Simplificando a expressão, chega-se a
! =
#
* ²,-* ²
6
2.3.3.
Corrente :
! =
&
|#
.% |
)/
∠240° − 90°
[12]
Simplificando a expressão, chega-se a
! =
2.4.
#
-/
∠150°
[13]
Potências
Conforme dedução a partir da definição de potência instantânea, da definição de valor RMS da tensão e
da corrente elétrica, o cálculo da potência aparente, expresso em [VA], ou seja, volt-ampère é dado por,
∗
12 = 344 !344
2.4.1.
[14]
:
Cálculo da potência aparente 6
∗
1 = ! = #
'
∠ − 0° =
#*
'
∠0°
[15]
Com isso podemos calcular a parcela de potência ativa e parcela de potência reativa a partir de relações
trigonométricas simples. Chegamos a, seguindo a notação da figura 2, com o somatório das potências ativas e
reativas das três cargas Z:
7 = 8128 9:; [16]
< = 8128 ;=> [17]
Figura 2 - Triângulo de potências
Portanto,
7 = 81 8 9:; 0° =
#*
'
< = 81 8 ;=> 0° = 0
[18]
[19]
7
2.4.2.
:
Cálculo da potência aparente 6
∗
1 = ! = #
* ²,-* ²
∠?120° − 120° − °@ =
#*
* ²,-* ²
∠ °
[20]
Portanto,
2.4.3.
7 = 81 8 9:; ° =
< = 81 8 ;=> ° =
#*
* ²,-* ²
9:; °
[21]
* ²,-* ²
#*
;=> °
[22]
:
Cálculo da potência aparente 6
∗
∗
1 = ! = ! = #
-/
∠240° − 150°
[23]
Portanto,
7 = 81 8 9:; 90° = 0
< = 81 8 ;=> 90° =
2.4.4.
[24]
#*
[25]
-/
Cálculo da potência aparente 6&
ABACD :
2.4.4.1. Método vetorial
A potência aparente total poderá ser determinada de duas formas basicamente. Uma delas consiste em
fazer uma soma vetorial das componentes ativas e reativas da potência, conforme calculado acima e,
posteriormente, realizar um cálculo simples usando relações trigonométricas e fasoriais para encontrar o fasor
potência aparente total para a configuração apresentada na figura 1.
Componente ativa [W]:
7EFG = 7 + 7 + 7 = H
#*
'
+
#*
9:; ° + 0I
#*
;=> ° +
* ²,-* ²
[26]
Componente reativa [Var]:
<EFG = < + < + < = H0 +
* ²,-* ²
#*
-/
I
[27]
8
Figura 3 – Triângulo de potências obtido
2.4.4.2. Método algébrico
A segunda alternativa é partir da definição de potência aparente, calcular a corrente total do circuito e
multiplicar pela tensão aplicada ao mesmo. Porém, não se pode utilizar a fórmula deduzida para cargas
equilibradas. Teremos que fazer um somatório de potências por fase.
Teremos o seguinte:
12 = 344
!
4JK3 344 4JK3 ∗
+ 344
!
4JK3 344 4JK3 ∗
+ 344
!
4JK3 344 4JK3 ∗
[28]
A dedução acima já foi feita e mostrada sob a forma fasorial na figura 3.
3.
Valores calculados teóricos
Para que se conhecessem os valores ôhmicos das cargas utilizadas no ensaio proposto, ou seja, os
valores de R e X, uma tensão eficaz foi aplicada sobre a carga e se efetuou a medida da corrente eficaz (tensão
fornecida pela fonte HP 6814B e leitura de corrente efetuada pela mesma fonte). Com isso, os valores a que se
chegou foram de:
= 498,269 Ω
= 457,772 Ω
= QR = 479,702 Ω
= QR = 495,910 Ω
= 46,341°
Os valores de referência calculados acima, a serem considerados nos cálculos teóricos, serão
considerados como o padrão para comparações em termos percentuais das grandezas medidas.
A partir dos valores medidos para as cargas ensaiadas, se realizou os cálculos das grandezas
mencionadas abaixo e deduzidas anteriormente.
9
7EFG = 7 + 7 + 7 = H
#*
'
+
<EFG = < + < + < = H0 +
#*
* ²,-* ²
#*
* ²,-* ²
9:; ° + 0I
;=> ° +
#*
-/
I
1&
EFG = T7EFG + <EFG
[29]
[30]
[31]
Assim,
7EFG = 49,163 [V]
<EFG = 50,121 [XY]
1&
EFG = T7EFG + <EFG = 70,208 [X]
4.
Procedimentos de ensaio e resultados
4.1.
Procedimentos do ensaio
Para o ensaio de comprovação do algoritmo de cálculo, os procedimentos numerados abaixo foram
realizados.
4.1.1. Montagem do circuito conforme a figura 1.
4.1.2. Ligação do medidor WT1030M conforme a figura 4.
Figura 4 – Circuito com ligação do WT1030M indicada (3-phase, 4-wire)
Tal ligação tem por objetivo a obtenção das grandezas (tensão V, corrente I, potências ativa, reativa e
aparente) a partir da ligação em um elemento do WT1030M a cada uma das cargas avaliadas, vista no circuito da
figura 4. Simultaneamente, se efetuou a medição das mesmas grandezas utilizando a fonte HP 6814B AC Power
Source/Analyser. Os resultados serão apresentados abaixo.
10
5.
Resultados
As medidas efetuadas para as cargas definidas no item 2.2 desse relatório e conforme o circuito da
figura 4, acima, são as mostradas na tabela abaixo. Os valores considerados para cálculo de , , , e foram obtidos a partir de tensão alimentada pela fonte HP 6814B AC Power Source/Analyser, feita fase a fase.
Com os valores obtidos, os demais cálculos deduzidos ao longo da seção 2 foram calculados, produzindo a
tabela 1. A tabela 2 nos apresenta os valores medidos pela fonte HP 6814B para a ligação trifásica das cargas
conforme a figura 1. As demais tabelas foram elaboradas a partir dos dados e medidas produzidas pelo
WT1030M (tabelas 3, 4 e 5).
Tabela 1 – Cálculos realizados a partir de deduções teóricas (mostrado na seção 3)
Cálculos Teóricos
V Média (V)
I Média (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
50,121
49,163
70,208
0,7002
45,554°
Não útil
127
(desequilíbrio)
Tabela 2 – Medições efetuadas pela fonte HP6814B AC Power
Médias e somatórios das medidas fornecidas pela fonte HP 6814B AC Power Source/Analyser
V Média (V)
I Média (A)
Q total (Var)
P total (W)
50
49,1
Não útil
127
(desequilíbrio)
S total (VA)
PF
Só fornece
Só fornece
por fase
por fase
Deg (°)
Não fornece
Tabela 3 – Medições com WT1030 e software em LabVIEW
Medidas fornecidas pelo WT1030M e software em LabVIEW
Elemento 1 - Carga Resistiva Pura
VRN (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
126,94
0,251
0,66
31,832
31,832
1
0
Elemento 2 - Carga Mista Indutiva
VSN (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,192
0,187
16,787
16,857
23,79
0,7088
44,862
Elemento 3 - Carga Indutiva Pura
VTN (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,167
0,25
31,652
3,162
31,812
0,7593
0,0994
11
Somatório (Σ) fornecido pelo WT1030M e software em LabVIEW
V Média (V)
I Média (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,099
0,229
49,099
51,851
87,439
0,75814
41,6045
Tabela 4 – Cálculos efetuados seguindo as equações de cálculo do manual do WT1030M
Somatório (Σ) - Calculado empregando as fórmulas do manual do WT1030M para as medidas acima
V Média (V)
I Média (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,1
0,229
49,1
51,85
87,44
0,758
41,60
Tabela 5 – Resultados das medidas com algoritmo de correção em LabVIEW
Medidas fornecidas por software em LabVIEW (com algoritmo de correção)
V (V)
I (A)
Q total (Var)
P total (W)
S total (VA)
PF
Deg (°)
127,099
0,229
49,099
51,851
71,409
0,856406
43,4398
12
6.
Análise dos resultados
Conforme deduções teóricas apresentadas na seção 2 desse anexo, a conclusão a que se chegou é que o
medidor WT1030M efetua um cálculo de forma errada da potência aparente quando esse equipamento é
utilizado com o intuito de medição de circuitos com cargas desequilibradas, como se pode conferir na tabela 3.
O cálculo correto envolveria um somatório vetorial a partir das potências ativa e reativa. O algoritmo de
cálculo do equipamento efetua a medição da tensão, da corrente e da potência diretamente e, a partir dessas
medidas, calcula a potência aparente a partir da multiplicação da tensão com a corrente, a potência reativa, o
fator de potência e o ângulo de fase. Tais cálculos, na configuração do aparelho 3P4W, são feitos elemento a
elemento.
Porém, o problema do algoritmo do WT1030M está na forma de calcular os somatórios associado à
função Σ do aparelho. Essa função Σ tem diferentes aplicações e definições, conforme o modo configurado (no
caso 3 Phase, 4 Wire). Para tensões e correntes, essa função nos fornece a média entre as três medidas efetuadas,
ou seja, nos fornece a média das medidas de tensão e corrente dos elementos 1 ao 3. Já para as grandezas
potência aparente, potência reativa, potência ativa, fator de potência e ângulo de fase essa função nos fornece um
somatório de fato. A potência reativa e a potência ativa, por exemplo, devem ser diagnosticadas a partir de um
somatório simples das potências de cada elemento. De fato é isso que o aparelho WT1030 nos fornece, como se
pode ver na tabela 3. Porém, as grandezas fator de potência e ângulo de fase, calculados pelo equipamento a
partir da grandeza somatório de potências aparentes dos elementos (Σ VA) são apresentadas de forma errônea.
Isso se deve ao fato de que a função Σ VA está definida a partir de um algoritmo que efetua a simples soma
algébrica das potências aparentes de cada elemento. Pode-se perceber tal fato na coluna referente ao somatório
da potência aparente da tabela 3.
6.1.
Cálculos efetuados pelo WT1030M na função somatório (Σ)
Segundo o item 17.1 do manual do WT1030M, temos as seguintes fórmulas e método de cálculo,
inclusive na ordem apresentada.
Modo de operação do equipamento: 3 fases com 4 fios (3P4W).
Σ Potência ativa:
Σ Potência aparente:
Σ Potência reativa:
ΣW = W + W + W
[35]
ΣVA = VA + VA + VA
[36]
Σvar = var + var + var
[37]
var` = Xa − Va ²
[38]
Onde:
Σ PF:
ΣPF =
Σd
Σef
[39]
13
Σ DEG (Phase Angle):
ΣDEG = cos m n
Σd
Σef
o
[40]
O grande erro no algoritmo dos somatórios e resultantes das medidas efetuadas ocorre no cálculo da
potência aparente, conforme segue:
ΣVA = VA + VA + VA
[41]
Que é feito de forma algébrica. A partir desse erro, seguem-se errados os cálculos de:
Σ PF;
Σ DEG (Phase Angle);
Σ Potência Aparente.
A comprovação de todos os erros constantes no item 6.1 desse anexo encontram-se nos resultados da
tabela 4, o qual foi calculado conforme o manual indica e que confere com relativa precisão ao que o medidor de
fato mede (observar a tabela 3). Isto quer dizer que o manual apresenta um erro no algoritmo de cálculo das
grandezas mencionadas acima e o multimedidor WT1030M tem esse algoritmo falho implementado fielmente de
acordo com o seu manual.
6.2.
COMPARAÇÕES entre equipamentos
O HP 6814B AC Power Source/Analyser não efetua o cálculo da potência reativa total, ou seja, ele não
apresenta algoritmo de cálculo (mesmo que for um simples somatório) para essa grandeza. Isso se justifica pelo
fato de que tal equipamento é uma fonte de alimentação poderosíssima, não um medidor de grandezas elétricas,
como se apresenta o WT1030M.
O HP 6814B AC Power Source/Analyser não efetua o cálculo da potência aparente total, ou seja, ele
não apresenta algoritmo de cálculo (nesse caso, um somatório vetorial) para essa grandeza. Isso se justifica pelo
fato de que tal equipamento é uma fonte de alimentação poderosíssima, não um medidor de grandezas elétricas,
como se apresenta o WT1030M
Por observações das tabelas de número 1 até a tabela 5 podem-se avaliar todas as medidas que foram
realizadas e se comprovar (baseado na dedução que foi elaborada) que o erro no algoritmo de cálculo é um
FATO.
ANEXO B
Descrição do software desenvolvido em LabVIEW
2
Sumário
1.
1.1.
1.2.
1.3.
1.3.1.
1.3.2.
1.3.3.
1.4.
1.5.
1.5.1.
1.5.2.
1.5.3.
1.5.4.
1.5.5.
1.6.
1.7.
1.7.1.
SOFTWARE DESENVOLVIDO EM LABVIEW ............................................ 4
Main.vi ................................................................................................................... 4
Configura Menu.vi ............................................................................................... 9
Gerar_Modelo_Manual.vi ................................................................................. 12
Medias das Matrizes.vi ........................................................................................... 18
Modelo.vi ................................................................................................................. 20
Gráficos.vi ............................................................................................................... 21
Configurações.vi ................................................................................................. 23
User’s Interface.vi ............................................................................................... 24
Seleciona_Grandezas_Plotar.vi ............................................................................. 25
Plotagem_Gráficos.vi ............................................................................................. 27
Seleciona Grandezas Tabela.vi .............................................................................. 28
Diagrama de Ligações.vi ........................................................................................ 30
Mostra Modelo Elétrico.vi ..................................................................................... 30
Edita Tabela.vi .................................................................................................... 31
Aquisição.vi ......................................................................................................... 33
Calcula_Potencias.vi ............................................................................................... 33
3
Lista de ilustrações
FIGURA 1 - PAINEL FRONTAL DE MAIN.VI ................................................................................................................ 4
FIGURA 2 – PARTE 1 DO DIAGRAMA DE BLOCOS DE MAIN.VI.................................................................................... 5
FIGURA 3 – PARTE 2 DO DIAGRAMA DE BLOCOS DE MAIN.VI.................................................................................... 6
FIGURA 4 – DIAGRAMA DE BLOCOS DE CONFIGURA ELEMENTOS.VI ........................................................................ 7
FIGURA 5 – PARTE 3 DO DIAGRAMA DE BLOCOS DE MAIN.VI.................................................................................... 8
FIGURA 6 – PAINEL FRONTAL DE CONFIGURA MENU.VI ......................................................................................... 10
FIGURA 7 – IMPORTA TESTES EM PAINEL FRONTAL DE CONFIGURA MENU.VI ....................................................... 10
FIGURA 8 – PAINEL FRONTAL COM MENSAGEM DE ERRO DE CONFIGURA MENU.VI ................................................ 11
FIGURA 9 – DIAGRAMA DE BLOCOS DE IMPORTA TESTES DE CONFIGURA MENU.VI ............................................... 11
FIGURA 10 – PAINEL FRONTAL DE GERAR_MODELO_MANUAL.VI......................................................................... 13
FIGURA 11 – PAINEL FRONTAL DE GERAR_MODELO_MANUAL.VI DURANTE O CÁLCULO ...................................... 14
FIGURA 12 – PRIMEIRA PARTE DO DIAGRAMA DE BLOCOS DE GERAR_MODELO_MANUAL.VI ............................... 15
FIGURA 13 – SEGUNDA PARTE DO DIAGRAMA DE BLOCOS DE GERAR_MODELO_MANUAL.VI ............................... 16
FIGURA 14 – TERCEIRA PARTE DO DIAGRAMA DE BLOCOS DE GERAR_MODELO_MANUAL.VI ............................... 17
FIGURA 15 – QUARTA PARTE DO DIAGRAMA DE BLOCOS DE GERAR_MODELO_MANUAL.VI ................................. 18
FIGURA 16 – PAINEL FRONTAL DE MEDIAS DAS MATRIZES.VI ............................................................................... 18
FIGURA 17 – PRIMEIRA PARTE DO DIAGRAMA DE BLOCOS DE MEDIAS DAS MATRIZES.VI ...................................... 19
FIGURA 18 – SEGUNDA PARTE DO DIAGRAMA DE BLOCOS DE MEDIAS DAS MATRIZES.VI ...................................... 20
FIGURA 19 – DIAGRAMA DE BLOCOS DE MODELO.VI ............................................................................................. 21
FIGURA 20 – PAINEL FRONTAL DE GRÁFICOS.VI..................................................................................................... 22
FIGURA 21 – SEGMENTO DO PAINEL FRONTAL DE GRÁFICOS.VI ............................................................................. 23
FIGURA 22 – PAINEL FRONTAL DE CONFIGURAÇÕES.VI.......................................................................................... 23
FIGURA 23 – SEGMENTO DO DIAGRAMA DE BLOCOS DE GRÁFICOS.VI .................................................................... 24
FIGURA 24 – PAINEL FRONTAL DE USER’S_INTERFACE.VI ..................................................................................... 25
FIGURA 25 – PAINEL FRONTAL DE SELECIONA_GRANDEZAS_PLOTAR.VI .............................................................. 26
FIGURA 26 – PRIMEIRA PARTE DO PAINEL FRONTAL DE SELECIONA_GRANDEZAS_PLOTAR.VI.............................. 26
FIGURA 27 – SEGUNDA PARTE DO PAINEL FRONTAL DE SELECIONA_GRANDEZAS_PLOTAR.VI.............................. 27
FIGURA 28 – PAINEL FRONTAL DE PLOTAGEM_GRÁFICOS.VI ................................................................................. 27
FIGURA 29 – DIAGRAMA DE BLOCOS DE PLOTAGEM_GRÁFICOS.VI........................................................................ 28
FIGURA 30 – PAINEL FRONTAL DE SELECIONA GRANDEZAS TABELA.VI ................................................................ 28
FIGURA 31 – SEGMENTO DO DIAGRAMA DE BLOCOS DE SELECIONA GRANDEZAS TABELA.VI ................................ 29
FIGURA 32 – SEGUNDO SEGMENTO DO DIAGRAMA DE BLOCOS DE SELECIONA GRANDEZAS TABELA.VI ................ 29
FIGURA 33 – PAINEL FRONTAL DE DIAGRAMA DE LIGAÇÕES.VI ............................................................................. 30
FIGURA 34 – PAINEL FRONTAL DE MOSTRA MODELO ELÉTRICO.VI ....................................................................... 31
FIGURA 35 – PAINEL FRONTAL DE EDITA TABELA.VI ............................................................................................. 31
FIGURA 36 – DIAGRAMA DE BLOCOS DE EDITA TABELA.VI .................................................................................... 32
FIGURA 37 – PAINEL FRONTAL DE SALVA XLS.VI.................................................................................................. 32
FIGURA 38 – DIAGRAMA DE BLOCOS DE AQUISIÇÃO.VI.......................................................................................... 33
FIGURA 39 – DIAGRAMA DE BLOCOS DE CALCULA_POTENCIAS.VI ........................................................................ 34
4
1.
SOFTWARE DESENVOLVIDO EM LABVIEW
O software é constituído por Virtual Instruments. Cada VI executa uma determinada rotina ou lógica
configurada. A recursividade, ou seja, um VI poder chamar a si mesma, de um mesmo banco de VI, pode ser
uma forma de utilização vantajosa e pode ser empregada em softwares. Uma descrição de cada VI será feita,
apresentando-se figuras com o diagrama lógico (Diagrama de blocos) empregado e o respectivo Painel frontal.
Onde for conveniente ou interessante, uma maior ênfase será dada para mostrar etapas importantes (ou mais
importantes) dentre todo o algoritmo desenvolvido. Diga-se isso devido ao fato de que algoritmos de correção de
cálculo de medidas elétricas foram feitos (devido ao defeito do WT1030M) e também ao fato de que cálculos
importantes, deduções e demais equacionamentos foram implementados a fim de que chegasse à simulações de
curvas de comportamento de máquinas de indução quando operadas como gerador.
1.1.
Main.vi
Essa consiste, como o próprio sugere, o VI principal do software. Esse VI apresenta a inicialização do
instrumento multimedidor WT1030M, efetua as configurações desse e apresenta a lógica de funcionamento
contínuo em “loop” justamente após todas as demais configurações efetuadas. Quando o software se encontra no
regime contínuo de varredura, o usuário pode alterar as configurações default conforme necessidades bem como
fazer uso dos recursos de software.
A figura a seguir apresenta o Painel frontal do VI Main.vi. O detalhamento do diagrama de blocos
será efetuado a seguir.
Figura 1 - Painel frontal de Main.vi
Dada a extensão e complexidade da rotina contida no diagrama de blocos de main. vi optou-se pela
apresentação da visão geral do todo como uma figura e, após, o detalhamento, VI a VI, das lógicas envolvidas e
considerações. Uma divisão em partes será efetuada para facilidade de documentação e explicações técnicas.
Informações elementares relativas ao software, para dummies, serão ignoradas e nem serão citadas. Isso inclui
informações como “ligação entre uma variável utilizada e sua relação com uma lâmpada de sinalização para
indicação de status” e coisas básicas para um usuário habituado à plataforma LabVIEW.
A figura a seguir apresenta a primeira divisão do diagrama de blocos do VI Main. Essa figura nos
apresenta a inicialização de variáveis chamadas de globais (por poderem ser utilizadas em qualquer ponto do
5
software e a qualquer momento) com valores decimais específicos para cada finalidade ou lógica em que essa
variável esteja sendo empregada na inicialização do programa. Essa atribuição de valores é uma segurança de
software que garante de certa forma a “limpeza” de expúrios ou valores antigos que possam estar atribuídos às
variáveis globais. Porém, todo o cuidado foi tomado em software nas atribuições dos valores desejados como
default para as variáveis mais importantes.
Figura 2 – Parte 1 do diagrama de blocos de Main.vi
Na mesma figura, tem-se um VI para inicialização do multimedidor WT1030M e outro VI para
configuração do tipo de ligação elétrica do equipamento.
A figura a seguir apresenta mais configurações iniciais a serem impostas ao multimedidor. Dentre
elas, a tensão no modo automático (AUTO) é setada, bem como a corrente (também em modo AUTO) e as
escalas possíveis de se atribuir às grandezas de tensão, corrente e potência, todas configuradas como escalas
unitárias.
6
Figura 3 – Parte 2 do diagrama de blocos de Main.vi
O VI Config Scaling.vi é fornecido também pelo fabricante do LabVIEW. Os outros dois instrumentos
virtuais também foram extraídos de site da National Instruments.
Por sua vez, o VI cuja caixa apresenta escrito “Config” apresenta o primeiro VI desenvolvido para esse
software. Nesse VI são executadas as configurações de quais grandezas deverão ser extraídas do pacote de
informações (ou seja, dentre todas as medidas efetuadas pelo multimedidor e enviadas por ele via GPIB) para
posterior utilização no software. Com isso, grandezas fundamentais são necessárias para a elaboração dos
ensaios de máquinas de indução. Dentre elas, configuraram-se as seguintes: tensões de cada uma das fases;
correntes; potências reativas; potências ativas; potências aparentes; ângulos de fase e fator de potência. Na figura
a seguir apresenta-se uma janela do diagrama de blocos do VI Configura Elementos.vi mostrando como é
efetuada a configuração das tensões e das correntes, elemento a elemento e fase a fase. A configuração segue da
mesma forma para as demais grandezas elétricas mencionadas anteriormente.
7
Figura 4 – Diagrama de blocos de Configura Elementos.vi
Retornando ao diagrama de blocos de Main.vi, tem-se o diagrama apresentado na figura abaixo. Aqui se
percebe a utilização de recursos de programação utilizando variáveis globais como determinantes de ações a
serem executadas. Por exemplo, tem-se o caso do teste lógico da variável global “Display Informativo” com a
constante inteira e numérica “2” funcionando como habilitador de uma função lógica da plataforma LabVIEW
que funciona como uma chave lógica, ou seja, se o teste com a variável “2” for verdadeira, a caixa de texto
“Status gravação” recebe o conteúdo (no caso, um texto em formato string) “Gravando amostras...” e, senão,
recebe atualizando. Da mesma forma a variável global “Bloqueia botões”, a qual está ligada ao property node
dos botão “Ler” e ao property node do botão “Botão Configuração”, funciona como uma chave lógica, ou seja,
se essa variável contiver o valor numérico inteiro entre zero e dois, uma ação ocorrerá com os botões no que diz
respeito à opção disabled. O que vai ocorrer se dá a partir das seguintes codificações: 0-Enabled, 1-Disabled, 2Disabled and Grayed Out (ou seja, o botão fica desabilitado para execução e fica em segundo plano sem que se
possa sequer clicá-lo).
8
Figura 5 – Parte 3 do diagrama de blocos de Main.vi
Todo o funcionamento do programa está relacionado à figura acima, uma vez que, após todas as
inicializações, o programa entra em um laço while de execução que só terminará quando o botão acima mostrado
(botão stop, ao pé da figura) que é o botão “Sair” presente no Painel frontal de Main.vi, for pressionado As
janelas que vão se abrindo conforme a interferência do usuário consiste em subprogramas ou Virtual Instruments
que executam a partir de um dos seguintes Virtual Instruments:
9
Configura Menu.vi;
Gerar_Modelo_Manual.vi;
Configurações.vi;
User’s Interface.vi;
Edita Tabela.vi;
Aquisição.vi.
Ao final da explicação e detalhamento de cada um dos VI’s acima mencionados se terá o programa todo
explicado e documentado. Isso porque, todas as chamadas de software, chamadas de outras VI’s existentes no
programa, telas de interface e comunicação e demais componentes do sistema desenvolvido se dá a partir de
laços fechados do tipo while ou laços do tipo case structure. Cada seção que se seguirá, apresentará o Painel
frontal, o qual servirá para mostrar as informações que o usuário poderá averiguar e utilizar, e o diagrama de
blocos, o qual conterá a lógica de programação de blocos. Cada VI interno a cada um desses VI’s será
apresentado da mesma forma (Painel frontal + diagrama de blocos) e, em casos de uma lógica mais elaborada
desenvolvida, esta será detalhada com maior profundidade para melhor compreensão.
1.2.
Configura Menu.vi
A figura a seguir apresenta o Painel frontal do VI Configura Menu. Nesse Painel frontal se tem a opção
de configurar qual a escala desejada pelo usuário para a grandeza corrente elétrica, para a tensão e para a
potência. Essa opção é útil a partir do momento que se instalam transformadores de corrente com uma relação
conhecida, por exemplo, de 2 A para 1 A e se deseja que a corrente mostrada no display do software seja a
corrente real. Para que isso ocorra basta configurar a escala respectiva à corrente para 2 e se terá a corrente real.
Ainda note-se na figura abaixo a existência de outras duas guias (“Range Tensão/Corrente” e “Configura
Amostras”), cada uma com a opção de executar alguma configuração pelo usuário no que diz respeitos às escalas
de tensão e corrente e de configurações de número de amostras e tempo aproximado em segundos entre uma
amostra e outra (para o caso de se querer manter um tempo preciso entre uma amostra e outra e que essa
amostragem ocorra por número de amostras vezes.
10
Figura 6 – Painel frontal de Configura Menu.vi
Basicamente, tem-se nessa rotina a existência de três caixas do tipo Box de seleção por clique onde cada
uma representa uma ação a ser selecionada. Existe uma caixa para seleção do caminho do arquivo a ser
importado pelo usuário, sendo que esse arquivo deverá ser do tipo xls, ou seja, uma planilha do Excel. Após
selecionar a box com o tipo de planilha a ser importada, basta o usuário buscar a planilha no diretório em que ele
a tenha salvo e clicar em “Importar Ensaio”. O usuário deverá fazer isso para as três planilhas a serem
importadas.
Figura 7 – Importa Testes em Painel frontal de Configura Menu.vi
Caso o usuário quiser salvar um arquivo (determinado pelo caminho selecionado) em duas planilhas ou
mais simultaneamente, a mensagem de erro aparecerá conforme se apresenta na figura a seguir indicando para
que seja selecionado só uma planilha por vez.
11
Figura 8 – Painel frontal com mensagem de erro de Configura Menu.vi
A figura a seguir apresenta a rotina do diagrama de blocos de Configura Menu.vi referente à aba
“Importa Testes”.
Figura 9 – Diagrama de blocos de Importa Testes de Configura Menu.vi
12
A explicação da rotina desenvolvida é a seguinte: um AND lógico é feito do sinal de cada um dos
botões com o sinal invertido dos outros dois botões. Isso serve para garantir que só um deverá estar pressionado
por vez. Quando no mínimo duas box estiverem pressionadas a saída do AND lógico será false e isso já é o
suficiente para não permitir que se habilite nem um dos três cases structures e se execute o que se encontra
dentro de cada um. Por sua vez, quando houver um “erro” ocasionado pela seleção de duas planilhas a serem
importadas haverá uma comparação lógica com um sinal true e dessa comparação resultará um sinal verdadeiro
ou falso que controlará a chave lógica já mencionada anteriormente. Se for falso o resultado da comparação a
mensagem “ERRO!!! Selecione UMA planilha a ser importada!!!” aparecerá na tela e o botão “Importar Ensaio”
estará desabilitado e oculto até que só uma planilha seja selecionada.
Dentro de cada case structure está contida a seguinte lógica: salvar o conteúdo da variável global
“Endereço de importação atual” em uma outra variável global de mesmo tipo criada para um dos tipos de ensaio.
Além essa lógica, salva o valor numérico “2” na respectiva variável global associada ao tipo de ensaio para
servir como habilitador de rotinas posteriores (como por exemplo para informar que todos os caminhos foram
salvos conforme o tipo de ensaio pelo usuário).
As demais rotinas não serão comentadas pela simplicidade de lógica e por representarem somente
carregamento de variáveis globais com valores ou simplesmente por serem responsáveis por setarem valores em
VI’s pré elaborados para comunicação com o WT1030M pela própria National Instruments.
1.3.
Gerar_Modelo_Manual.vi
Para o processo de geração do modelo elétrico da máquina de indução ensaiada, essa consiste no VI
mais importante, com exceção do Main.vi, por questões óbvias. É nesse VI que são feitos os cálculos
matemáticos (efetuados com a utilização de variáveis globais do tipo float ou variáveis locais (semelhantes às
globais, porém voláteis). Além disso, nesse VI é apresentado o status de importação das planilhas de ensaio a
vazio, de rotor bloqueado e de velocidade síncrona. Sem que a importação das três planilhas esteja “OK” o
usuário não poderá nem configurar as demais informações nem clicar no botão “Calcular” com o intuito de gerar
o modelo elétrico propriamente dito. Providencialmente foi realizada uma simulação com a correta importação
das planilhas, conforme mostrado na figura abaixo e uma simulação com a importação de uma das planilhas
faltando, também na figura abaixo, porém do lado direito).
13
Figura 10 – Painel frontal de Gerar_Modelo_Manual.vi
Em caso de algum erro de importação o botão “Calcular” encontra-se desabilitado para ser acionado
pelo usuário. Isso é uma precaução porque não é aceitável tentar gerar um modelo elétrico sem se ter os três
ensaios necessários para isso (inclua-se aqui como necessário o ensaio de velocidade, para a obtenção da
resistência que representa as perdas ôhmicas do núcleo).
A figura abaixo mostra a mensagem que é mostrada ao usuário quando esse pressiona o botão
“Calcular” após este ter importado corretamente as três planilhas dos ensaios e também efetuado todas as
configurações (que serão apresentadas na seção Configurações.vi) sobre a rede, sobre a máquina de indução
ensaiada ou mesmo um modelo elétrico já desenvolvido anteriormente (existe a opção de se digitar os valores de
um modelo elétrico fornecido pelo fabricante, por exemplo, conforme se verá a em Configurações.vi).
14
Figura 11 – Painel frontal de Gerar_Modelo_Manual.vi durante o cálculo
As figura a seguir mostra a primeira parte do diagrama de blocos do VI Gerar_Modelo_Manual. Como
esse VI é extenso horizontalmente se apresentará em partes, utilizando numeração ordinal.
Como não se utilizou um laço do tipo while para que a janela permaneça aberta durante as escolhas e
configurações do usuário, uma lógica que foi muito utilizada na elaboração desse software foi empregada: uma
variável é carregada com um valor numérico qualquer quando um botão de abertura for clicado. Como o
programa Main.vi está em constante loop, ou seja, preso em um laço while, toda a vez o programa passar pelo
botão que chamou o VI Gerar_Modelo_Manual.vi ele efetuará a comparação lógica da variável global
anteriormente carregada com um valor com um valor constante (que aqui é “1”, como se pode ver o teste lógico
entre a variável global “Habilita Janela “Gerar_Modelo_Manual.vi”” com o valor numérico inteiro “1”). Tal
rotina só será finalizada ou, em outras palavras, só fechará o laço case quando um botão de sair for pressionado e
esse botão carregar forçadamente um valor diferente de “1” – nesse caso específico – para que o programa não
mantenha mais o Painel frontal aberto.
15
Figura 12 – Primeira parte do diagrama de blocos de Gerar_Modelo_Manual.vi
Essa segunda parte do diagrama de blocos apresenta a rotina para fechar o Painel frontal
Gerar_Modelo_Manual e um conector para chamar o VI Configurações.
16
Figura 13 – Segunda parte do diagrama de blocos de Gerar_Modelo_Manual.vi
A terceira parte do diagrama de blocos do VI apresenta a lógica para efetuar a rotina de cálculos
matemáticos. Todos os cálculos são realizados nesse momento. Além dos cálculos essa figura apresenta alguns
testes lógicos que fazem aparecer uma caixa de texto durante a etapa de cálculo ou habilitam ou não botões.
Porém a parte mais importante que aparece nessa terceira parte do diagrama é a efetivação da
importação das planilhas em Excel a partir dos caminhos dos diretórios previamente configurados pelo usuário.
Para isso se faz uso de um bloco próprio do LabVIEW (Read From Spreadsheet File.vi é o nome do bloco) que
permite a importação de arquivos em Excel com relativa simplicidade. A seguir optou-se por armazenar essa
matriz sob a forma de tabela do tipo string para posterior utilização nos cálculos. E essa operação é feita para os
três caminhos de diretórios selecionados anteriormente.
17
Figura 14 – Terceira parte do diagrama de blocos de Gerar_Modelo_Manual.vi
18
A quarta parte mostrada na figura abaixo apresenta mais três VI’s que possuem diferentes finalidades e
que contém grandes quantidades de cálculos. O VI Média das Matrizes realiza a média das grandezas elétricas
salvas durante os procedimentos de ensaio, fazendo uma varredura na matriz de dados por linhas, somando-os e,
ao final, divide pelo total de valores que foram considerados durante a soma e gera um valor único que será o
valor médio. O VI faz isso para todas as colunas.
Figura 15 – Quarta parte do diagrama de blocos de Gerar_Modelo_Manual.vi
1.3.1. Medias das Matrizes.vi
A figura abaixo mostra o painel frontal do VI Medias das Matrizes. Esse Painel frontal é de utilização
para debugs por parte do programador. O usuário durante a execução do software não tem acesso às informações
contidas e mostradas desse painel.
Figura 16 – Painel frontal de Medias das Matrizes.vi
19
Nessa primeira parte do diagrama de blocos tem-se claramente a presença de um conector para a matriz
genérica a ter suas médias calculadas e, já no primeiro flat sequence tem-se a amostragem do número de linhas e
número de colunas da matriz de entrada (que nesse momento ainda é uma tabela do tipo string) e também uma
inicialização de uma matriz linha com valores default nulos, ou seja, “0”. Interessante é notar que o bloco
funcional chamado de “Fract/Exp String To Number” já converteu a matriz string em valores numéricos para
serem manipulados.
Os demais cálculos presentes nessa parte dizem respeito ao cálculo iterativo das médias. O algoritmo foi
desenvolvido para que a matriz seja numérica, primeiramente. Após, utilizando os próprios incrementos de “i”
do laço for, se fez a lógica para que uma coluna seja endereçada por vez e, dentro dessa coluna, cada linha seja
varrida até que todos os valores tenham sido somados para após serem divididos pelo número total de valores
somados para gerar a média por coluna. Lembrando que se optou pela separação antecipada de uma coluna (cujo
comprimento é “1”, ou seja, comprimento de uma coluna e total de linhas dado por N° Linhas averiguados e
mostrado na figura abaixo.
Figura 17 – Primeira parte do diagrama de blocos de Medias das Matrizes.vi
A partir daí é que um laço do tipo {for “i” menor do que (N° Linhas-1)} (isso porque a contagem de
linhas começa por zero para fins de endereçamento) executa a varredura linha a linha, realiza a soma do valor
atual com o valor total já armazenado na variável local “Somador” que é do tipo float (como todas as grandezas
laranja).
Finalizada essa etapa, um novo valor de “i” do laço while externo da rotina incrementará em uma
unidade a coluna a ser selecionada mantido o comprimento “1”.
20
A figura a seguir mostra a etapa que calcula a média dos valores somados linha a linha e salva na
variável local “Matriz das médias finais”. Essa variável local salva também a matriz final de médias em uma
variável global de mesmo tipo para que se possa utilizar tal matriz em outros locais do software.
Figura 18 – Segunda parte do diagrama de blocos de Medias das Matrizes.vi
1.3.2. Modelo.vi
O VI desenvolvido e chamado de Modelo.vi segue a rotina de cálculos estabelecidos no item 3.5 desse
trabalho. Conforme a descrição fornecida no item mencionado, uma sequência de cálculos procurou ser
estabelecida para que se chegasse ao produto final: a obtenção dos parâmetros elétricos para o modelo da
máquina de indução. Todas as variáveis necessárias para a execução correta desse VI são extraídas das matrizes
de médias calculadas (que já foram descritas anteriormente) e das próprias configurações do usuário (conforme
se verá na descrição do VI Configurações).
Nesse mesmo VI são efetuados alguns cálculos apresentados no item 2.6, no que diz respeito ao
“Conjugado e potência através do equivalente Thevenin”, onde se calcula via software os valores de tensão
equivalente de Thevenin ܸ
ଵ, , resistência equivalente de Thevenin ܴଵ, e reatância equivalente de Thevenin
ܺଵ, . Esses últimos cálculos serão necessários para a simulação do comportamento da máquina de indução
quando essa funcionar como gerador. Com eles, as expressões de conjugado elétrico e de rendimento, por
exemplo, serão obtidas com relativa simplicidade e sem muito esforço computacional.
A figura abaixo mostra como foi efetuado o cálculo da tensão equivalente de Thevenin com a utilização
das variáveis globais referentes a cada uma das grandezas elétricas.
21
Figura 19 – Diagrama de blocos de Modelo.vi
1.3.3. Gráficos.vi
O VI Gráficos é o responsável por todos os cálculos necessários para que gráficos sejam gerados. Esses
gráficos poderão ser gerados pelo usuário, o qual poderá escolher entre quais grandezas elétricas deseja plotar o
gráfico, escolhendo uma para o eixo x e outra para o eixo y. Dois gráficos poderão ser gerados simultaneamente.
Sendo assim, como todas as grandezas que são calculadas aqui são em função do escorregamento da máquina
funcionando como gerador de indução, esse será o primeiro cálculo realizado. Para isso foram selecionados 2000
valores de escorregamento, variando de -1 até 1. As demais grandezas, a cada incremento do laço “for” utilizado
para associar cada valor de escorregamento (situado em uma posição dentro de uma matriz linha) à mesma
posição para todas as demais grandezas dependentes do escorregamento, ou seja, Grandeza = f(s).
A figura a seguir apresenta o painel frontal de Gráficos.vi, com valores calculados para a máquina de
indução ensaiada (sendo que esta máquina, os procedimentos e demais características elétricas encontram-se no
capítulo 6 desse trabalho), onde a posição da matriz “1022” corresponde aos valores nominais da máquina
simulada, ou seja, todas as grandezas calculadas estão vinculadas ao escorregamento de 0,023.
22
Figura 20 – Painel frontal de Gráficos.vi
A figura a seguir apresenta como é feita a lógica de criação da matriz correspondente ao
escorregamento do gerador de indução (simulado a partir do modelo elétrico). Pode-se perceber a presença de
um laço for com incrementos de 0,001 no escorregamento, partindo de i=0 até i=1999, ou seja, a matriz terá
2.000 posições, conforme configurado e mostrado no diagrama de blocos.
Salienta-se como é feita a indexação do escorregamento, posição a posição dentro da matriz de dados:
para incremento de i, uma nova posição dentro da matriz de dados é criada, recebendo o valor atual de
escorregamento. Isso é possível com a utilização do bloco funcional chamado de Replace Array Subset.
23
Figura 21 – Segmento do painel frontal de Gráficos.vi
1.4.
Configurações.vi
O VI Configurações é o responsável por gerenciar as entradas efetuadas pelo usuário e configurações
elétricas sobre ensaios, sobre a máquina ensaiada e informações diversas. A figura abaixo mostra o painel frontal
com exemplos de entradas que devem ser fornecidas pelo usuário para que o processo de gerar o modelo elétrico
seja feito com precisão e coerência. Qualquer informação faltante, ou que for posta de forma equivocada,
provocará erro no cálculo dos parâmetros elétricos.
Figura 22 – Painel frontal de Configurações.vi
24
A figura abaixo mostra um segmento do diagrama de blocos que implementa o VI Configurações.
Especificamente na figura abaixo se dá ênfase à janela Configurações (mostrada na figura acima), onde há a
opção ao usuário de entrar com o seu modelo elétrico já pronto. Para tanto, variáveis do tipo float foram
configuradas para aceitarem valores reais e que serão truncados com 6 dígitos de precisão. Caso essa opção for
selecionada o software ignorará as planilhas que foram (e tiveram que ser importadas), calculará da mesma
forma todas as grandezas (simulando a máquina como gerador para o modelo determinado pelo usuário) e irá
gerar os gráficos de desejo do usuário.
Figura 23 – Segmento do diagrama de blocos de Gráficos.vi
As demais janelas desse diagrama de blocos são simples e não merecem destaque algum, já que
recebem os valores configurados (ou digitados) pelo usuário e o atribuem à variáveis globais devidamente
criadas para que seja intuitivo o processo de programação. Na verdade, o VI Configurações é uma mera função
de entrada de dados de forma direta com o usuário, semelhante ao VI Configura Elementos já apresentado
anteriormente (destinado às configurações do WT1030M).
1.5.
User’s Interface.vi
Como o próprio nome sugere, essa é a principal interface de comunicação entre os resultados
produzidos pelo software e os interesses do usuário. Nesse VI estão contidas informações sobre o modelo
elétrico (cuja obtenção é um dos objetivos desse trabalho), sobre os gráficos que poderão ser gerados para que o
usuário atenda suas necessidades de simulações sem que seja necessário a utilização de Excel, sobre os
diagramas de ligações sugeridos durante os ensaios e conforme o ensaio praticado e apresenta a possibilidade de
gerar planilhas em Excel contendo todas as grandezas simuladas a partir do escorregamento.
Uma explicação sobre cada uma das possibilidades será apresentada a seguir. A figura abaixo mostra o
painel frontal de User’s_Interface.vi, com as possibilidades e opções ao usuário. No caso apresentado abaixo,
ainda continuando a simulação com a máquina de indução apresentada no item 6 desse trabalho, se deixou
propositadamente assinaladas somente duas das três opções. Isso serve para exemplificar como a lógica foi
25
desenvolvida, isto é, quando se habilitar uma das “box” os botões associados àquela função descrita em cada
item serão habilitados ao usuário para que haja interferências por parte desse. No caso abaixo, o que se refere à
geração de planilhas em Excel das grandezas elétricas e possibilidades de exportação dessas planilhas encontrase não selecionada. Em conseqüência o botão “Seleciona Grandezas” também se encontra desabilitado e
bloqueado para o usuário.
Figura 24 – Painel frontal de User’s_Interface.vi
A seguir se apresenta a figura do diagrama de blocos do VI User’s Interface. Porém, como esse
diagrama tem basicamente a função de apresentar as opções ao usuário, não será dada muita importância à lógica
contida nesse campo. Por sua vez, um detalhamento será dado para cada um dos VI’s associados às funções
apresentadas acima. Praticamente todo o resultado prático a que esse trabalho desenvolvido se dispôs encontrase nesse Virtual Instrument.
1.5.1. Seleciona_Grandezas_Plotar.vi
Oferece as possibilidades ao usuário escolher quais as grandezas (e a relação que lhe interessa) que
serão plotadas em gráficos do tipo XY. A figura abaixo mostra o VI que apresenta essas opções ao usuário.
Como existe a possibilidade de se plotarem dois gráficos, o usuário deve escolher uma grandeza para cada um
dos eixos, ou seja, uma para o eixo horizontal do gráfico número 1 e outra para o eixo vertical do mesmo
gráfico. O mesmo é necessário que seja feito para nas atribuições dos eixos para o gráfico 2. Caso duas
grandezas sejam selecionadas para um mesmo eixo a mensagem de erro é fornecida, como se pode verificar na
figura abaixo, onde propositadamente um erro foi provocado no eixo vertical do gráfico número 2. No status
da seleção da grandeza do EIXO VERTICAL pode-se perceber qual a mensagem de erro fornecida ao usuário em
contraposição ao status de “Grandeza selecionada corretamente.”. Note-se também que o botão “Sair”
encontra-se desabilitado e isso ocorrerá toda a vez que o usuário cometer um erro como o que foi forçado a
fazer. Trata-se de uma proteção de software. Isso justifica a utilização de caixas de conversação destinadas às
orientações de operação em tempo real.
26
Figura 25 – Painel frontal de Seleciona_Grandezas_Plotar.vi
A figura abaixo mostra um segmento do diagrama de blocos de Seleciona_Grandezas_Plotar.vi.
Basicamente o algoritmo aqui desenvolvido faz um teste lógico (utilizando operação lógica do tipo AND) entre
cada um dos botões (representados pelos quadrados com opção box para que se assinale) e o inverso dos demais
botões, exatamente igual à idéia já desenvolvida anteriormente no processo de importação de planilhas. Caso
duas ou mais opções tenham sido marcadas pelo usuário, haverá somente resultados FALSE ligados aos cases.
Isso fará com que um teste lógico de um OR com 9 entradas com a constante TRUE resulte em um resultado
FALSE. Esse resultado lógico FALSE fará com que imediatamente o status associado à condição de erro seja
exibido ao usuário.
Figura 26 – Primeira parte do Painel frontal de Seleciona_Grandezas_Plotar.vi
27
Figura 27 – Segunda parte do Painel frontal de Seleciona_Grandezas_Plotar.vi
1.5.2. Plotagem_Gráficos.vi
Essa rotina encontra-se intimamente ligada ao VI Seleciona_Grandezas_Plotar. As grandezas que o
usuário definir para cada eixo será atribuído automaticamente a um dos eixos dentre os quatro eixos disponíveis
(dois gráficos com dois eixos). A figura abaixo mostra o gráfico produzido pela seleção do usuário do
escorregamento para o eixo horizontal do gráfico número 1 e do conjugado para o eixo vertical do mesmo
gráfico. Percebe-se que a curva obtida apresenta o formato esperado de curvas típicas conhecidas para máquinas
de indução.
Figura 28 – Painel frontal de Plotagem_Gráficos.vi
A figura a seguir apresenta um segmento do diagrama de blocos de Plotagem_Gráficos.vi. Claramente e
com relativa simplicidade se vê que existe um bloco pronto responsável pela plotagem de gráficos do tipo XY,
cujas entradas são simplesmente uma matriz numérica do tipo linha (ou coluna) associada ao eixo X e outra
matriz do tipo linha (ou coluna) associada ao eixo Y.
28
Figura 29 – Diagrama de blocos de Plotagem_Gráficos.vi
1.5.3. Seleciona Grandezas Tabela.vi
Oferece ao usuário a opção de que uma planilha em formato Excel seja exportado para qualquer
diretório desejado contendo as informações que o usuário venha a selecionar. Permite ainda a opção de que o
usuário selecione se deseja inserir a data no nome do arquivo, o que será feito de forma automática, ou inserir a
hora que o arquivo foi criado, para uma melhor organização das planilhas fornecidas. Um status de gravação é
mostrado ao usuário assim que ele salva a planilha. É importante que o botão “Confirma” seja pressionado pelo
usuário antes de salvar a planilha. Isso porque se ele clicar em “Salvar” antes de haver a confirmação, todas as
grandezas serão salvas. Isso não consiste em um problema, uma vez que toda informação advinda do software
poderá ser utilizada e manipulada dentro da planilha Excel e que a configuração default são todas as grandezas
serem gravadas quando se clicar em salvar.
Figura 30 – Painel frontal de Seleciona Grandezas Tabela.vi
A figura abaixo mostra um segmento do diagrama de blocos de Seleciona Grandezas Tabela.vi. Nesse
segmento vemos a parte em que a variável global “Tabela Final Salvar” foi criada e se está construindo uma
tabela do tipo string, chamada de “Tabela Final”. A partir desse ponto, o próximo flat sequence introduz nessa
29
matriz criada pela seleção do usuário das variáveis que ele desejou salvar no cabeçalho que irá acompanhar a
planilha em Excel na ordem em que forem salvas as matrizes, conforme o mostrado.
Figura 31 – Segmento do diagrama de blocos de Seleciona Grandezas Tabela.vi
A figura a seguir mostra a parte da rotina do diagrama de blocos que efetua a configuração do diretório
que o usuário deseja salvar a planilha a ser exportada por ele e como ocorre a concatenação de strings a partir
das opções e seleções (no que diz respeito à presença da hora e da data no nome do arquivo) feitas pelo usuário.
Cabe ressaltar que a planilha só será efetivamente salva após o usuário clicar no botão “Salvar” que
produzirá um sinal lógico TRUE e que fará com que a função “Write to Spreadsheet File.vi” efetue a criação da
planilha no diretório especificado pelo usuário, contendo as informações por ele selecionadas.
Figura 32 – Segundo segmento do diagrama de blocos de Seleciona Grandezas Tabela.vi
30
1.5.4. Diagrama de Ligações.vi
A figura que se segue apresenta os esquemas de ligações sugestivos (que no caso do trabalho de
validação desenvolvido nesse projeto, foram montados dessa forma) no processo do ensaio de máquina de
indução escolhida e que está apresentada no item 6 desse trabalho.
O usuário pode visualizar o esquema de ligação efetuado durante os ensaios ou ter noção de como
proceder para realização de tais ensaios (que também contém embasamento em normas de ensaios).
Figura 33 – Painel frontal de Diagrama de Ligações.vi
1.5.5. Mostra Modelo Elétrico.vi
Por fim, dentro do VI User’s Interface, tem-se a apresentação do modelo elétrico resultante do ensaio
da máquina de indução. A figura apresenta a nomenclatura de cada um dos elementos do modelo elétrico, sem
maiores explicações (que podem ser encontrados aqui nesse trabalho, nos itens referentes à obtenção do modelo
elétrico ou, para ser mais preciso, no item 3.5) ao usuário.
Para cada uma das variáveis existe uma caixa numérica, como se fosse um display, mostrando qual foi
o valor a que se chegou após todos os cálculos efetuados com sucesso a partir dos dados obtidos durante os
ensaios pelo próprio software.
31
Figura 34 – Painel frontal de Mostra Modelo Elétrico.vi
1.6.
Edita Tabela.vi
O VI Edita Tabela apresenta as possibilidades de manipulação por parte do usuário sobre os valores
adquiridos durante o ensaio. Essa manipulação se limita a deletar alguma eventual amostra que possa ter sido
“disparada” em momento errado ou que esteja com valores incoerentes por algum motivo, como a percepção de
que o primeiro conjunto de medidas foram feitos com uma escala errada configurada de tensão, corrente ou
potência. Para que isso seja solucionado sem que haja a necessidade de que a tabela seja limpa, outros eventuais
dados sejam perdidos ou qualquer outro motivo, pode-se selecionar a amostra que se deseja deletar e confirmar
clicando no botão “Confirmar”. Ao fazer isso o usuário irá excluir somente a amostra que foi selecionada,
incluindo todos os “ciclos” de medição que possam ter sido praticados durante a ocorrência do erro. Caso
houverem mais de uma amostra com problema visível, sugere-se ao usuário que limpe a tabela e reinicie as
amostras, dado que após a primeira exclusão ocorre um re-aranjo da matriz de dados que já foi manipulada uma
vez. A figura a seguir apresenta o painel frontal do VI Edita Tabela, juntamente com as suas opções.
Figura 35 – Painel frontal de Edita Tabela.vi
32
A figura a seguir apresenta um segmento do diagrama de blocos referente à Edita Tabela.vi.
Basicamente se utiliza o bloco “Delete From Array” para deletar a amostra que apresenta erro. Assim, o número
de amostras (ciclos, na realidade)(configurados pelo usuário) apresenta o tamanho a ser deletado da planilha a
partir de um determinado ponto dela. O “N° Inicial” é o número que o usuário digitou como sendo a amostra a
ser deletada. O valor “1” deve ser subtraído dele porque a indexação das planilhas começa a partir do zero.
Figura 36 – Diagrama de blocos de Edita Tabela.vi
Após a exclusão de uma amostra selecionada que possa conter algum problema o usuário procede ao
“Salvar Tabela”. Quando fizer isso, abrirá o Painel frontal do VI Salva XLS que o permitirá salvar uma planilha
com os dados produzidos pelo ensaio da máquina de indução no diretório de sua escolha, com o nome de sua
escolha e com opções de inserção automática da data e horário nos nomes da planilha. Caso nenhum ensaio seja
selecionado, a fim de que se estabeleça uma relação entre a planilha salva e o tipo de ensaio que foi realizado,
uma mensagem de erro será apresentada, como a que se pode ver na figura abaixo, onde propositadamente não
se selecionou nenhum tipo de ensaio. Note-se que a possibilidade de se salvar uma planilha sem que o tipo de
ensaio seja indicado foi inibido sob a forma de bloqueio do botão “Salvar” para possível intervenção do usuário.
Porém esse pode sair sem salvar planilha alguma clicando em “Sair sem salvar”.
Figura 37 – Painel frontal de Salva XLS.vi
33
1.7.
Aquisição.vi
Esse VI é responsável pela aquisição do pacote configurado previamente de grandezas elétricas (tensão,
corrente e potência por fase e por elemento). A partir de VI’s próprias desenvolvidas pela empresa National
Instruments para a família de multimedidores da YOKOGAWA WT10XX para aquisição de medidas elétricas
efetuadas pelo equipamento. Basicamente o que esses VI’s fazem é estabelecer via GPIB a comunicação do
software LabVIEW e o medidor, onde o software desenvolvido solicita as medidas pré-configuradas no VI
Configura Elementos. Esse pacote é recebido e é tratado para a que se estabeleça a correção via software para o
cálculo da potência aparente (devido à falha do algoritmo do WT1030M, cuja explicação está contida no Anexo
A).
Figura 38 – Diagrama de blocos de Aquisição.vi
Um VI importante desenvolvido para a solução desse problema de lógica da família de multimedidores
WT10XX foi desenvolvido e será explicado no item a seguir.
1.7.1. Calcula_Potencias.vi
O VI Calcula_Potencias é a solução para a falha de algoritmo implementado nos cálculos da potência
aparente trifásica e demais grandezas que venham a depender dela (ângulo de fase e fator de potência) para
cargas desequilibradas. O que se realizou nessa rotina foi basicamente pegar a matriz de medidas recebidas pelo
software via GPIB advindas do WT1030M e, via indexação da posição das grandezas de interesse para a
solução, se propôs a ocupação das grandezas corretas medidas para realizar um somatório de forma vetorial das
potências ativas com as reativas a fim de produzir a potência aparente real do sistema trifásico, seja este
equilibrado ou não.
Para que se entenda melhor, considere-se uma matriz de valores configurada durante a inicialização do
equipamento (já explicado no VI Configura Elementos) com 21 colunas, ou seja, contendo 21 grandezas
34
elétricas configuradas e lidas de fato a cada amostragem solicitada (cuja ordem é pré-estabelecida no manual do
WT1030M, ou seja, a ordem de saída é pré-estabelecida, embora se possa configurar O QUÊ medir para cada
elemento. E é isso que, na realidade, é feito em Configura Elementos.vi).
De posse das potências ativas e das potências reativas fase a fase se pode encontrar a potência aparente
resultante no formato polar a partir do cálculo de módulo e ângulo. O módulo será dado pela raiz quadrada do
quadrado da soma das potências ativas com o quadrado da soma das potências reativas. O ângulo será dado pelo
arco tangente da parte imaginária pela parte real (isto é, do somatório das potências reativas com o somatório das
potências ativas). Após os cálculos, se insere duas novas colunas (uma para a potência trifásica aparente e outra
para o ângulo de fase trifásico) na matriz de medidas efetuadas, indexadas para serem inseridas na coluna 22 da
matriz (dado que 21 grandezas são efetuadas já como default).
Figura 39 – Diagrama de blocos de Calcula_Potencias.vi
ANEXO C
Resoluções e Precisões
2
Sumário
1.
2.
HP AGILENT 3478A ........................................................................................... 3
WT1030M .............................................................................................................. 3
3
1.
HP Agilent 3478A
Precisões para o equipamento HP Agilent 3478A
Measurement Functions HP AGILENT 3478A (5 1/2 digit)
Specifications dc Voltage
Resistance (2-Wire, 4-Wire)
Characteristics dc current
Characteristics ac current
2.
Range
30mV
300mV
3V
30V
300V
Input Resistance
30mV
300mV
3V
30V
300V
30 ohm
300 ohm
3 K ohm
30 K ohm
300 K ohm
3 M ohm
300 mA
3A
300 mA
3A
Resolution
100nV
1uV
10uV
100uV
1mV
Value
>(10ଵ ) Ohm
>(10ଵ ) Ohm
>(10ଵ ) Ohm
10 M Ohm ± 1%
10 M Ohm ± 1%
100 u Ohm
1 m Ohm
10 m Ohm
100 m Ohm
1 Ohm
10 Ohm
1 uA
10 uA
1 uA
10 uA
WT1030M
Precisões para o multimedidor YOKOGAWA WT1030M
Measurement Functions WT1030M/WT1030
Description
LEAD/LAG
phase detection
accuracy
Accuracy when
line filter is ON
Description
Voltage/Current
Power
When both the voltage and current inputs are sine waves, and the input
level is 50% or more of the range rating: ±5 deg (20 kHz to 10 kHz)
Voltage/current: For fc/5 or below, Power: For fc/5 or below, add 2% of
add 1% of reading to the accuracy
reading to the accuracy when the
when the filter is OFF.
filter is OFF.
Frequency Measurement Functions
4
Frequency
range: When the
input is at least
10% of rated
range.
Description
Apparent Power
(VA)
Reactive Power
(var)
Power Factor
(PF)
Phase Angle
(deg)
Description
Torque
computing
analog inputs:
Revolution
speed
computing
analog input:
Revolution
speed
computing pulse
input:
±(0.05% of rdg + 1 digit)
Computing Accuracy
±0.001% of VA range
±0.001% of VA range
±0.0001
Calculated from the power factor, with an additional error of ±0.005°
Motor Evaluation Functions (253640)
±(0.1% of rdg + 0.1% of F.S.)
±(0.1% of rdg + 0.1% of F.S.)
±(0.05% of rdg + 2 digits)
Download