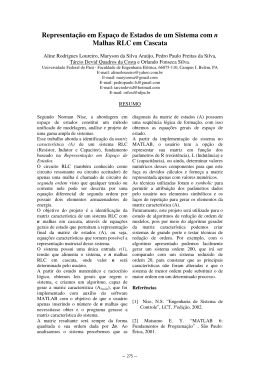
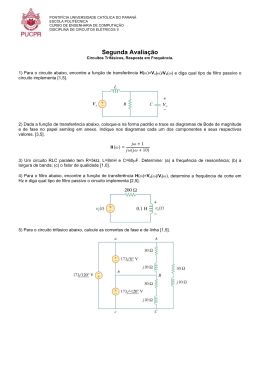
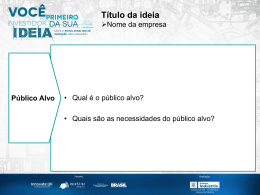
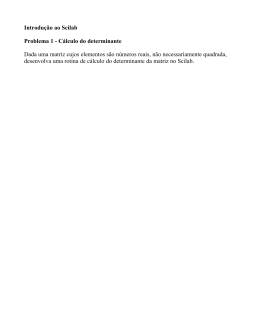
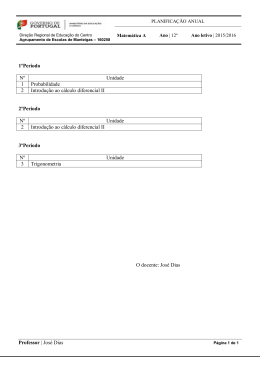
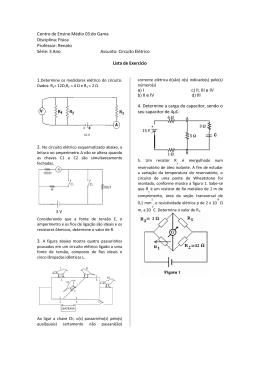
UNIVERSIDADE DO ESTADO DE SANTA CATARINA CENTRO DE CIÊNCIAS TECNOLÓGICAS – CCT Sistemas de Controle (CON) – Aula Prática 03 (13/03/2012) Prof. Eduardo Bonci Cavalca Aluno:_________________________________________________________________ Aluno:_________________________________________________________________ MODELAGEM DE SISTEMAS DINÂMICOS Experiência 1: Considere o seguinte circuito elétrico RLC série: Ele é alimentado por uma fonte de tensão V(t) (com valor ajustado pelo bloco step) e desenvolve uma corrente I(t) (medida pelo amperímetro). 1.1) Obtenha o modelo desse sistema no formato de uma equação diferencial, em função das constantes R, L e C e de V(t) e I(t): V(t) = Dicas: a tensão no capacitor é dada pela multiplicação da integral da corrente multiplicada pelo inverso da capacitância; já a tensão no indutor é diretamente proporcional à indutância que apresenta e à taxa de variação da corrente no tempo. 1.2) Utilizando o Scilab/Xcos, represente graficamente o circuito acima, adicionando: um bloco scope (limites -0.5 e 1.5, período 3s); com um bloco clock (início 0s e período 0.001s); um bloco mux para duas entradas no scope; bloco end (tempo 3s); e um bloco ground no negativo da fonte de tensão (requisito para o software realizar a simulação). No mux do scope ligar a saída do amperímetro e a saída do step (ajustado para inicial 0, final 1, tempo 1). Ajuste também os valores dos componentes R, L e C, conforme a figura anterior. O gráfico obtido deve ser semelhante a este, com I(t) em azul e V(t) em preto: Analisando-se o gráfico, é possível notar que depois do instante t=2s temos que I(t) = 0A. Com base nessa constatação e no modelo diferencial do item 1.1, o que se pode concluir sobre a fórmula e o valor da tensão em cada um dos componentes após t=2s? Vind= Vres= Vcap= Lembrete: a lei de Krichhoff das malhas garante que o somatório das tensões na malha é nulo, ou seja, as tensões dos componentes somadas deve ser igual à tensão da fonte. 1.3) Considere agora um sistema de rotação mecânico, composto pelos elementos representados na figura abaixo: Ele apresenta um momento de inércia J=0.1, um conjugado resistente do tipo viscoso de coeficiente resultante B=1 e uma constante elástica K=10 para o eixo com elasticidade de torção. Além de um torque, ou conjugado, aplicado T(t) e uma velocidade angular ω(t). Sabendo que o modelo diferencial desse sistema pode ser escrito como: ∫ Isole a derivada de mais alto grau de ω(t) (que será a nossa saída) e monte no Scilab/Xcos a equação diferencial apresentada acima. Configure a entrada T(t) como um step, da mesma forma que no circuito RLC, bem as mesmas propriedades para a os blocos de clock, scope, e end. Qual o valor do máximo pico do sinal de saída? Em que instante ele ocorre? ωmáx=_______________ t mp=_______________ 1.4) Compare o sinal obtido para o sistema de rotação mecânica com o do circuito RLC: __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ 1.5) Considerando os instantes após t=2s, ou seja, no equilíbrio, faça uma comparação, estabelecendo um paralelo, entre os torques em cada um dos elementos mecânicos e a tensão em cada um dos componentes elétricos dos dois sistemas. Faça também, de forma qualitativa, uma análise da transferência e do armazenamento de energia nos elementos e componentes. __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________
Download