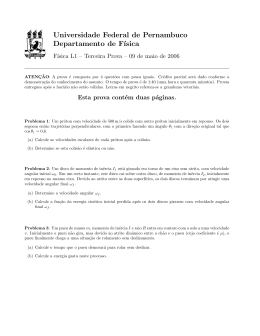
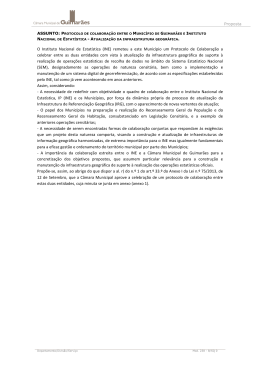
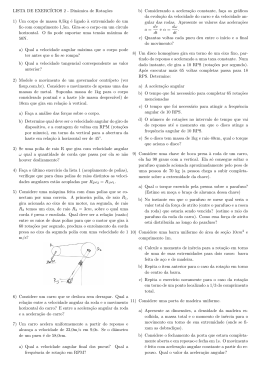
Corpos Rı́gidos M OMENTO A NGULAR Mecânica II (FIS-26) Prof. Dr. Ronaldo Rodrigues Pelá IEFF-ITA 5 de março de 2013 R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Roteiro 1 Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Roteiro 1 Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Movimento Plano do Corpo Rı́gido Quando todas as partı́culas de um corpo rı́gido se movem ao longo de trajetórias que são equidistantes de um plano fixo, diz-se que o corpo rı́gido possui um movimento plano. Há 3 tipos de movimento plano de corpo rı́gido 1 2 3 Translação: quando cada segmento de linha sobre o corpo rı́gido permanece, durante o movimento, paralelo à sua posição original. Rotação em torno de um eixo fixo: quando todas as partı́culas do corpo rı́gido (exceto as que se apoiam sobre o eixo de rotação) se movem em trajetórias circulares. Movimento plano geral: quando há uma combinação dos dois movimentos anteriores. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Movimento Plano do Corpo Rı́gido R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Movimento Plano Geral Movimento plano geral = translação + rotação O sistema de eixos xy é fixo e mede a posição “absoluta” de dois pontos A e B sobre o corpo. A origem do sistema x0 y 0 está fixada a um ponto A do corpo rı́gido (um ponto que geralmente tem um movimento conhecido) Os eixos x0 y 0 não giram com o corpo, eles podem apenas transladar em relação ao sistema fixo R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Movimento Plano Geral ~vB = ~vA + ~vB/A B está sempre à mesma distância de A Seu movimento (em relação a A) pode ser caracterizado como uma rotação em torno de um eixo “fixo” que passa por A ~vB = ~vA + ω ~ × ~rB/A ~aB = ~aA + α ~ × ~rB/A + ω ~ × (~ ω × ~rB/A ) R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Exemplo A barra AB mostrada na Figura está confinada a mover-se ao longo de planos inclinados em A e B. Se o ponto A tem uma aceleração de 3,00 m/s2 e uma velocidade de 2,00 m/s ambas direcionadas plano abaixo no instante em que a bara fica na horizontal, determine a aceleração angular da barra neste instante. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Solução Uma vez que A e B se movem em trajetórias retilı́neas, as velocidades (e acelerações) destes pontos estão dirigidas ao longo destas direções Como o comprimento da barra não varia com o tempo, vA cos 45◦ = vB cos 45◦ , ou seja, vB√= vA = 2,00 m/s. Como vB/A = ωrB/A , temos: (2).(2m/s).( 2/2) = (ω).(10,0 m), ou seja, ω ~ = (0,283 rad/s)ẑ R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Solução Aceleração angular: ~aB = ~aA + α ~ × ~rB/A + ω ~ × (~ ω × ~rB/A ) (aB cos 45◦ )x̂ + (aB sin 45◦ )ŷ = (aA cos 45◦ )x̂ − (aA sin 45◦ )ŷ + (10,0α)ŷ − (0,283)2 .(10,0)x̂ que conduz ao seguinte sistema de equações: aB cos 45◦ = aA cos 45◦ − (0,283)2 .(10,0) aB sin 45◦ = −aA sin 45◦ + 10,0α Substituindo aA = 3,00 m/s2 , obtemos α ~ = (0,344 rad/s2 )ẑ R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Momento Angular Corpo rı́gido girando em torno de um eixo fixo ∆. Componente do momento angular L∆ (ao longo do eixo de rotação): X X ~li .ê∆ L∆ = mi (~ri × ~vi ).ê∆ = i i R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Momento Angular ~li .ê∆ = li cos θ = (mi ωdi )ri cos θ = mi ωd2 . i ! X X L∆ = mi ωd2i = mi d2i ω. i X i mi d2i , I∆ : momento de inércia do corpo rı́gido em i relação ao eixo ∆ L∆ = I∆ ω Em algumas condições especiais (e.g. quando ∆ é um eixo de simetria), a identidade anterior pode ser reescrita na forma vetorial: ~ = I~ L ω R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Momento de Inércia ~ = I~ Por analogia com o momento linear P~ = M~v , L ω mostra que o momento de inércia mede a resitência de um corpo à rotação (I é como se fosse uma “massa” para a rotação). O momento de inércia mede como a massa está distribuı́da em torno de um eixo de rotação: quanto mais massa houver próximo ao eixo de rotação, menor será o momento de inércia. Para um dado corpo rı́gido, o momento de inércia depende do eixo considerado, já que a massa pode estar melhor distribuı́da em torno de um eixo que de outros. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Momento de Inércia Para distribuições contı́nuas de massa: X I= ri2 ∆mi , No limite em que ∆mi → 0: Z I = ri2 dm. Distribuição linear de massa: dm = λdl. Distribuição superficial de massa: dm = σdA. Distribuição volumétrica de massa: dm = ρdV . R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Exemplo Obter o momento de inércia da haste a seguir com relação ao eixo z. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Solução Tomando a divisão de massas como na Figura anterior, temos: Z L L3 M L2 I= x2 λdx = λ = 3 3 0 R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Exemplo Obter o momento de inércia do disco (massa M e raio R) em relação ao eixo de simentria normal ao seu plano R.R.Pelá Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Corpos Rı́gidos Solução Considerando a divisão de massas da Figura anterior: Z I= (x2 + y 2 )σdA = Z R Z 2π 0 r2 σrdθdr = σ 0 R4 M R2 2π = 4 2 Nas tabelas, mostramos o momento de inércia para diversos objetos com distribuição uniforme de massa. http://www.ief.ita.br/˜rrpela/downloads/ FIS26-MomentoArea-2011.jpeg http://www.ief.ita.br/˜rrpela/downloads/ FIS26-MomentoInercia-2011.jpeg R.R.Pelá Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Corpos Rı́gidos Teorema Se um corpo rı́gido pode ser dividido em duas partes A e B, então seu monento de inércia (em relação a um eixo ∆) é igual à soma dos momentos de inércia de A e B (com relação ao mesmo eixo). Prova: Basta dividir o domı́nio de integração em A e B: Z Z Z I= r2 dm = r2 dm + r2 dm = IA + IB . S=A+B A R.R.Pelá B Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Teorema dos eixos paralelos Teorema dos eixos paralelos ou de Steiner Se o momento de inércia em relação a um eixo que passa pelo CM é ICM , então o momento de inércia em relação a qualquer outro eixo paralelo a este é: I = ICM + M d2 , sendo d a distância dos eixos e M a massa do corpo rı́gido. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Teorema dos eixos paralelos Prova: Considere dois sistemas cartesianos com eixos paralelos, um dos sistemas está localizado no CM Escrevendo a expressão do momento de inércia X I= ri2 ∆mi . R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Teorema dos eixos paralelos Mas ~ri = ~rCM + ~ri/CM , e portanto, 2 2 ri2 = ~ri · ~ri = rCM + ri/CM + 2~rCM · ~ri/CM , o que implica: I = X = M d2 + ICM X X 2 ri/CM ∆mi + 2 ~rCM · ~ri/CM ∆mi , X + 2~rCM · ~ri/CM ∆mi . 2 rCM ∆mi + X X Como ∆mi~rCM = ~ri ∆mi , tem-se X X ~0 = (∆mi )(~ri − ~rCM ) = (∆mi )(~ri/CM ), donde segue que: I = ICM + M d2 . R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Exemplo Determine o momento de inércia da haste da Figura seguinte em relação ao eixo z. Solução: Usando o teorema dos eixos paralelos: M L2 M L2 = Iz + . 3 4 Iz = R.R.Pelá M L2 . 12 Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Raio de giração Ocasionalmente, o momento de inércia de um corpo rı́gido em relação a um eixo especı́fico é documentado em manuais através do raio de giração k. Ele é definido como: r I 2 . I = Mk ou k= M O raio de giração pode ser interpretado como a distância (em relação ao eixo de rotação) na qual se estivesse concentrada toda a massa M produziria o mesmo momento de inércia. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Teorema dos eixos perpendiculares Seja um corpo rı́gido plano com momentos de inércia Ix e Iy por dois eixos (perpendiculares entre si) que estão no mesmo plano do corpo. Se o eixo z é perpendicular a x e a y, então: Iz = Ix + Iy . Prova Z Ix = 2 y dm, Z Iy = x2 dm. t Z Iz = R.R.Pelá Corpos Rı́gidos (x2 + y 2 )dm = Ix + Iy . Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Exemplo Calcule o momento de inércia de um disco por um eixo passando por um diâmetro. Solução: Considere o disco ilustrado na Figura. Por simetria, temos Ix = Iy Usando o teorema dos eixos perpendiculares: Iz = Ix + Iy = 2Ix . 2 Como Iz = M R /2: Ix = R.R.Pelá M R2 . 4 Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Momento Angular: caso geral Componente do momento angular ao longo do eixo de rotação é L∆ = I∆ ω Mas o momento angular é um vetor paralelo ao eixo de rotação (ou então, a ω ~ )? A resposta é: geralmente não. ~ eω Então, qual a relação entre L ~ ? Vejamos. X ~ = L ~ri × (∆mi~vi ). i Para um eixo fixo ~vi = ω ~ × ~ri X ~ = L (∆mi )~ri × (~ ω × ~ri ). i R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Momento Angular: caso geral Sendo ω ~ = ωx x̂ + ωy ŷ + ωz ẑ e ~ri = xi x̂ + yi ŷ + zi ẑ, podemos escrever o duplo produto vetorial como: ~ri × (~ ω × ~ri ) = [(yi2 + zi2 )ωx − xi yi ωy − xi zi ωz ]x̂ = [−xi yi ωx + (x2i + zi2 )ωy − yi zi ωz ]ŷ = [−xi zi ωx − yi zi ωy + (x2i + yi2 )ωz ]ẑ Tomando o limite em que ∆mi → 0 e reescrevendo na forma matricial, temos: ~ = I~ ˜ω L R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Tensor de inércia Ixx Ixx −Ixy −Ixz Iyy −Iyz I˜ = −Iyx −Izx Izy Izz Z Z Z 2 2 2 2 = (y +z )dm Iyy = (x +z )dm Izz = (x2 +y 2 )dm Z Ixy = Iyx = xydm Z Ixz = Izx = xzdm Z Iyz = Izy = R.R.Pelá yzdm Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Tensor de inércia I˜ é conhecido como tensor de inércia de um corpo rı́gido. Ixx , Iyy e Izz são conhecidos como momentos de inércia em relação aos eixos x, y e z, respectivamente Ixy , . . . , Izy são conhecidos como produtos de inércia. Para definir bem o tensor de inércia I˜ é necessário especificar uma origem O e os eixos x, y e z. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Tensor de inércia Se fixamos o ponto O e fazemos uma rotação (de eixos) dada pela matriz de mudança de base R̃, então: 0 x x y = R̃ y 0 . z z0 ~ = R̃L ~0 e ω Logo L ~ = R̃~ ω0. Como R̃ é uma matriz ortogonal: ~ 0 = (R̃T I˜R̃)~ L ω0 O tensor de inércia nos novos eixos é: I˜0 = R̃T I˜R̃ R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Tensor de inércia Como I˜ é simétrico, sempre é possı́vel encontrar um conjunto de eixos ortogonais, x0 , y0 e z0 , em relação ao qual o tensor é diagonal (trata-se de um problema de autovalores e autovetores). Neste caso, o tensor de inércia estará diagonalizado e pode ser escrito na forma simplificada: I x0 0 0 0 . I˜ = 0 Iy0 0 0 Iz0 Ix0 , Iy0 e Iz0 são chamados de momentos principais de inércia do corpo rı́gido (com relação ao ponto O). Os eixos x0 , y0 e z0 são chamados de eixos principais de inércia. R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Tensor de inércia Quando um corpo rı́gido gira em torno de um eixo principal de inércia ∆, podemos dizer que: ~ = I∆ ω L ~. A determinação dos eixos principais de inércia é um problema de autovetores (note que I∆ é um autovalor associado). Existem muitos casos, entretanto, em que os eixos principais de inércia podem ser determinados por inspeção (no caso de um eixo de simetria, por exemplo). Dos três momentos principais de inércia, um será o maior e outro será o menor de todos os momentos de inércia de eixos que passam pelo ponto O (daı́ a vantagem em se conhecer os eixos principais de inércia). R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Tensor de inércia Alguns eixos principais de inércia são dados na Figura R.R.Pelá Corpos Rı́gidos Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Exemplo Determine os eixos principais de inércia com relação ao ponto O. O corpo rı́gido mostrado na Figura ?? é formado por 4 massas (duas massas M e duas m) ligadas por hastes de massas desprezı́veis. Considere M 6= m. R.R.Pelá Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Corpos Rı́gidos Solução Izz = 4ma2 + 4M a2 = 4a2 (m + M ), Ixx = 2ma2 + 2M a2 = 2a2 (m + M ) = Iyy , Ixy = −2ma2 + 2M a2 = 2a2 (M − m), Iyz = Ixz = 0. 2 2a (m + M ) 2a2 (m − M ) 0 I˜ = 2a2 (m − M ) 2a2 (m + M ) 0 , 2 0 0 4a (m + M ) Cujos autovetores são: 0 0 1 1 √ 2 1 √ 2 0 R.R.Pelá 1 √ 2 1 √ − 2 0 Corpos Rı́gidos . Corpos Rı́gidos Movimento Plano do Corpo Rı́gido Momento Angular Solução Os eixos principais de inércia aparecem na Figura. R.R.Pelá Corpos Rı́gidos
Download