NIAD&R
Distributed Artificial Intelligence & Robotics Group
•
NIAD&R is a member of LIACC
Artificial Intelligence and Computer Science Laboratory
University of Porto
Overview of NIAD&R
Coordinator: Eugénio Oliveira
http://www.fe.up.pt/~eol/MEMBERS/eco_html
LIACC - March 2004
1
NIAD&R
Distributed Artificial Intelligence & Robotics Group
OUTLINE
LIACC overview
NIAD&R main Goals
NIAD&R through Numbers
Main research lines
1 Models for Agents’ interaction
2 Advanced features for Autonomous Agents
3 Coordination of Agent-based teamwork
4 Agent-based Applications
Projects
Conclusions
Future work
LIACC - March 2004
2
NIAD&R
Distributed Artificial Intelligence & Robotics Group
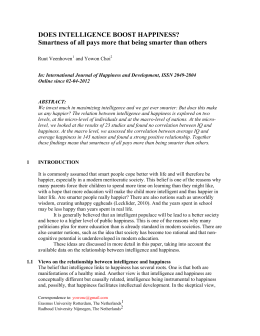
~50%
NCC
F. Sciences
University of Porto
Advisory
Committee
~23%
Coordination
Board
NIAD&R
F. Engineering
general coordinator
~27%
NIAAD
F. Economics
LIACC - March 2004
Scientific
Board
3
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Existe desde 1988.
No fim de 2003 incluía:
34 pessoas com doutoramento,
40 outros membros (estudantes de
doutoramento, bolseiros, etc.)
LIACC - March 2004
4
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Nos últimos 5 anos (‘99 – ‘03) foram publicados:
• 30 artigos publicados em Revistas Internacionais submetidos a
avaliação independente (13 em 2003);
• 105 artigos em livros publicados pelas editoras
reconhecidas (ex. Springer), submetidos a avaliação
independente, e com entrada no “Science citation index”
•
•
•
•
1 livro (editado);
16 capitulos de livros;
133 outros artigos in actas de Congressos / Workshops
9 actas de congressos ou Workshops editadas;
LIACC - March 2004
5
NIAD&R
Distributed Artificial Intelligence & Robotics Group
(’99 - ‘03) foram orientadas e concluídas:
• 18 Teses de Doutoramento,
• 34 Teses de Mestrado.
•Em 2004 estão a ser orientadas:
• 21 Teses de Doutoramento,
• 37 Teses de Mestrado.
LIACC - March 2004
6
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Nos últimos 5 anos (’99 - ‘03) foram organizados:
• 19 congressos / workshops
Em 2003 os membros do LIACC participaram em:
• 22 comissões de programa
• 6 editorial boards de revistas
LIACC - March 2004
7
NIAD&R
Distributed Artificial Intelligence & Robotics Group
NCC: - Declarative programming
Logic Programming Systems
Parallel Execution of Logic Programs
Constraint Programming
- Parallel and Distributed Systems
Concurrency, Distribution and Mobility
OO Languages for Distributed Environments
Parallel Programming Environments
- Logic, Language and Computation
Formal Systems; Logic and Grammars
Complexity
- Automatic Evaluation of Students Exercises
- Geo-Referenced Data Processing
LIACC - March 2004
8
NIAD&R
Distributed Artificial Intelligence & Robotics Group
NIAAD: Data Mining and Decision Support
Collaborative methodologies for DM & DS.
Recommendation tools for the selection of DA methods
Modeling Dynamic Systems
Modelling complex dynamic systems,
Advanced Techniques in Data Mining and DA
Modelling higher order concepts using ILP
Statistical methods for classification.
App. to the recognition of multi-spectral images and bioinformatics.
Data Mining for Text and Web
LIACC - March 2004
9
NIAD&R
Distributed Artificial Intelligence & Robotics Group
NIAD&R Main Objectives:
To develop:
Models for inter-operability in Agent-based Systems
Agent-based Software for practical Applications in DDD
To help young researchers in preparing their thesis
LIACC - March 2004
10
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Main Concept:
AGENTS :
Computational entities including the following features:
Distributed
Reactive and Communicative
Pro-Active
Autonomous
Other capabilities:
Mentalistic capabilities:
Beliefs, Desires, Intentions, Emotions
Multi-Agent Systems
LIACC - March 2004
11
NIAD&R
Distributed Artificial Intelligence & Robotics Group
What is the rationale behind our research?
Agents Interaction
Negotiation protocols
Coordination of teams of Agents
Conflict resolution
Agent Capabilities
Agent Applications
LIACC - March 2004
Learning and Adaptation
Emotion-based agent architecture
Electronic Institutions for VO
Multiple-Experts DSS
Simulation
12
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Nr. of Researchers
Senior Res.
PhDs
Res.Ass.
Ext.Coll.
TOTAL
Tech.
Adm.
LIACC - March 2004
1999 2000 2001 2002
2003
1
1
5
2
9
_
1
2
6
2
12
_
1
4
13
3
21
_
½
½
1
2+1-1
8-1
2
11
_
1
4
13
3
20
_
½ (shared) ½ (shared)
½ (shared)
13
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Scientific production 1999 2000 2001 2002
2003
Chap. in Books
Journ + Series
Proceed +TRep
Total Publications
1
1+9
9+4
20(+4)
1
+4
4+6
9 (+6)
4
1+3
2*+5
3+9
13+8
11 (+9) 20(+8)
PhD Thesis approved 1
MSc.Thesis approved 4
2
1
1(+1)
2
1
1
1
2
Total (Theses appr.) 5
3
4
2
3
(without Tech. Reports)
Theses in prep(PhD+M)
1
1+3
15+1
20 (+1)
4+4
3+8
5+6
* Interview to TRN- Technical Research News Magazine
LIACC - March 2004
14
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Scientific production 1999 2000 2001 2002
2003
Prototypes (rev)
2(+3)
2+(2)
3+(1)
4+(2)
2+(4)
Conf. Org.+PCs
+4
+5
3+5
1+10
1+11
Ed.Boards
1
1
2
2
2
2
3+4
1+4
7
2
3
2
1+*
P.g.Courses+Inv. Sem.
Awards (prizes)
-
* Plus one nomination for the best paper at CIA’03
LIACC - March 2004
15
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Main Research lines:
1.
Flexible and trustful tools and platforms for
agents interaction:
Electronic Institutions for B2B
LIACC - March 2004
Automatic negotiation
Distributed Belief Revision
16
NIAD&R
Distributed Artificial Intelligence & Robotics Group
1.
Flexible and trustful environments for agents interaction:
Norms
& Rules
V.O.
formation
V.O.
operation
Q-Negotiation
Monitoring
links to
other
Institutions
V.O
dissolution
Ontology
Services
EAgt
financial
MAgt
legal
LIACC - March 2004
EAgt
EAgt
EAgt
Electronic
Contract
Ana Paula Rocha+ Henrique + Andreia+ ECO
17
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Negotiation and Electronic Institutions
Q-negotiation protocol:
Multi-Attribute bid Evaluation
Qualitative feedback
Adaptive bid formation
Distributed dependencies resolution
FOREV implementation (V.E. formation platform)
Electronic Contracts (in progress)
Ontology Services (in progress)
LIACC - March 2004
Protocols for both inter and intra coalition
negotiation for Distributed Resources management
MACIV (MAS for Civil Construction)
ECO + JMFonseca-UNL
18
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Agent-based System for EC :
MAS architecture suitable for
B2C interaction
Agent Tactics and Strategies for Negotiation
Adaptive to the market dynamics (Q learning)
SMACE prototype available through the WEB
Time-dependent tactics
0
0
0
Time
LIACC - March 2004
1
1
Utility
Utility
Utility
1
Greedy
Linear
Anxious
Time
Time
Henrique Cardoso + ECO 19
NIAD&R
Distributed Artificial Intelligence & Robotics Group
I can do
70 for 40
I can do 30
for 20
I need
100
I can do
50 for 30
I can do 90
for 50
D
Need 100
30 for 20
Task announcing
70 for 40
50 for 30
Coalition formation
Edification
Machinery
Supervisors
Stocks
manager
Workers
Storehouse
Four useful coalitions:
- C & D (cost=70)
- B & C (cost=60)
- A & C (cost=90)
- A & D (cost=80)
Coalition team & best offer
announcing to coordinators
Leading
Quit
Facilitator
Stocks
manager
One software agent for each
physical resource ...
55
New best offer announcing to
coordinators
Leading
45
Leading
Quit
Chief
Intra-coalition negotiation
50
The winner !!!
Facilitator
80
Task announcement & 100negotiation100
Garage
75%
100
OK
A B
40 20
Initial costs
Facilitator
C
30
D
A B
10
Coalition configuration
Machinery
C
100 64%
Personnel
A B
C
100 62.5%
C
D
A B
A OK but D refuses
75
100
Facilitator
D
7
A B
D
Coordinator proposes new
percentage to A and D
25C
A and D OK but B and C
refuses
100
OK
Workers
OK
A B 18
D
Coordinator receives new
lower value and divulges
the lowering percentage
C
D
Coordinator proposes new
percentage to A
75
OK
A B
C
D
A B
A accepts
C
D
Coordinator sends new proposal
Intra-coalition negotiation
Planning
Experts
Facilitator
LIACC - March 2004
Edification
Garage
Storehouse
Planning
Personnel
Interconnecting network
A 1
Coordinator 1
B
2
C
Coordinator 2
The self-depreciation problem
JMFonseca + ECO
20
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Multi-agent systems dealing with Conflict resolution
Argumentation-based Belief Revision in a Distributed
MAS involving a GIS
Application domain: DSS for Land use assessment
Prototype: DiPLoMAT System
LIACC - March 2004
available
M.Benedita Malheiro + ECO
21
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Cooperation Layer
Self Model
Cooperation Layer
Expert
System
Acquaintance
Model
Communication
Module
Cooperation Module
Assumption based Belief Revision System
Problem Solver
ATMS
Knowledge Base
Facts
Assumptions
Justifications
Consumers
Beliefs
Scheduler
LIACC - March 2004
Inferred Nodes
22
6. DOMÍNIO DE APLICAÇÃO
NIAD&R
Distributed Artificial Intelligence & Robotics Group
LIACC - March 2004
23
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Main Research lines:
2. Advanced features for Autonomous Agents:
LIACC - March 2004
Agents and MAS Learning capabilities
Learning marketing strategies
“Emotion-based" agents’ architectures
24
NIAD&R
Distributed Artificial Intelligence & Robotics Group
2. Advanced features for Autonomous Agents:
Agents and MAS Learning capabilities
“How can Heterogeneous Agents interactively learn and
“influence” each other in their learning process?”
Non-deterministic, partially observable, Nonsupervised environment- Traffic Lights Control
LIACC - March 2004
Luis Nunes + ECO
25
NIAD&R
Distributed Artificial Intelligence & Robotics Group
• Traffic Light Control
• Simulation based on real
data
• Simplified car movement
• 1, 2 and 4 crossings
scenarios x 3 teams (GA,
QL, Heuristic)
LIACC - March 2004
Luis Nunes + ECO
26
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Learning for Multi-Agent Systems:
Exchanging Advice
Use communication to improve learning performance
• Environments:
Multiple agents dealing with similar problems
Agents use different learning techniques
• Expected features:
Improved resistance to local minima
No pre-selection of the “best algorithm”
Group performs better than the best of its individuals
LIACC - March 2004
Luis Nunes + ECO
27
NIAD&R
Distributed Artificial Intelligence & Robotics Group
3.To whom ?
Environment
T7.A,Ar
* PAr(S) advice
> TA,O * PO(S)
Integrate
1. Observed State
Advisee
4. 8.
State
(observed
theact
Advisee)
Choose
actionby
and
2. Should I request advice ?
ScA * PA < PO or ConfusedAbout(State)
Advisor
LIACC - March 2004
Self-confidence
Performance
State
Trust
Actors:
6. Advised action (a)
5. Best guess is (a)
Concepts:
Advisee
Advisor
Other agents
28
NIAD&R
Distributed Artificial Intelligence & Robotics Group
“Emotion-based“ agent architectures:
based on neuro-science (cognition-emotion relationship)
“How to escape from traditional utility-based functions”?
Agents new features: valence-based memory,
<V,I,E,G> associating Valence with
Goals and both internal and external sources
Relationships between
“emotion-like parameters”
Luis Sarmento + Daniel Moura+ECO
LIACC - March 2004
29
NIAD&R
Distributed Artificial Intelligence & Robotics Group
•
Emotional Elicitation
– Process of evaluating the chances (V) of achieving a given
goal (G) upon the state of the environment (<E>) and the
agent internal state (<I>).
V = EEFG(<E>,<I>)
•
Emotion Accumulators
– Enable to model emotions behavior through time (t);
– Consumes a percentage (PInput) of an EEFG;
– Value decays according to a decay constant (Td).
EAG(t,PInput ,Td)
•
Basic Emotional Mechanism
EEFG(<E>,<I>)
Luis Sarmento + Daniel Moura+ECO
LIACC - March 2004
EAG(t,PInput ,Td)
30
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Main Research lines:
3. Coordination of Agent-based teams
LIACC - March 2004
Coordination policies in adversarial environments
31
NIAD&R
Distributed Artificial Intelligence & Robotics Group
3.
Coordination of Agent-based teams
agent-based common framework suitable for
controlling teams of cooperative robots (either
physical or simulated)
Techniques: distinction between active and strategic
situations
Agents Coordination mechanisms: Situation-basedSP,
DPRExchange, ADVCOM, SLM, MM.
New team strategies (tactics, formations, player
types…)
COACH UNILANG: general language to enable a special
agent ("coach") to supervise a team of co-operative robots.
LIACC - March 2004
Luis Paulo Reis
32
NIAD&R
Distributed Artificial
Intelligence
& Robotics Group
Flexible
Strategies
LIACC - March 2004
33
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Constraint Satisfaction in a distributed environment:
UNIPS - University Planning and Scheduling
to reach mutual agreement in distributed multiagent system applications
UniLang: language for representing timetabling problems
LIACC - March 2004
Luis Paulo Reis
34
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Main Research lines:
4. Application oriented:
Proof of “intelligent agent” concept in
specific application domains:
Elec. Market, Mob.Comm.Networks, Brokering,
3D Visualisation, Traffic Control management…
LIACC - March 2004
35
NIAD&R
Distributed Artificial Intelligence & Robotics Group
4. Application oriented work:
Intelligent Brokering for the Insurance domain (BeeGent) –
LNogueira
ILP for Time Series Analysis. Optimal traffic control in
multi-class packet switched networks –Alex Alves
MAS platform for Electrical Energy e-Market - JLPinto
Agent-based framework making available security
mechanisms and negotiation algorithms tuned for this EEmarket
LIACC - March 2004
36
NIAD&R
Distributed
Artificial
Intelligence
& Robotics Group
2-BIAS (Brokerage
in Insurance
– an Agent-based
System)
Interaction on
user’s behalf
Customer
description and
needs
CA
Product
proposals
Broker
IA
Customers
communities
IA
Stereotypes
...
Negotiation
Personalised
offers
LIACC - March 2004
Qualitative
feedback
IA
Ontology
Luis Nogueira+ECO
37
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Traffic Engineering of Data CommunicationsNetwork
VBR Traffic
Time Series Forecasting
observed
90
85
80
75
Load
–To assess the
adequacy of ILP for
Time Series Analysis
automation
predicted
70
65
60
55
50
1
6
11
16
21
26
31
36
41
46
51
56
61
66
71
76
81
86
91
Tim e
LIACC - March 2004
Alex Alves+RC+ECO
38
96
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Multi-agent Platform for Electricity
E-Market
• Agents interaction using XML and
HTTPS (or SOAP?)
• Intra-platform communications
with XML-RPC
• Market Operator acts as a message
router; Auctions.
• Agents authenticate through digital
certificates
• Messages between the Market
Operator and the Market Agents
are digitally signed
LIACC - March 2004
Certificatio
n
Authority
Database
Auctioneer
Market
Operator
System
Operator
System
Service
Provider
Platform
Generator
Agent
Consum
er
Agent
Service
Provider
Agent
João Luis Pinto
Service
Consumer
Agent
39
NIAD&R
Distributed Artificial Intelligence & Robotics Group
MAS for 3D visualisation of RoboCup games
For the RoboCup
Simulation League
Agent-based control
Cameras deciding on
the best perspective
on the situation +
Director agent
Sérgio Louro+LPR+ECO
LIACC - March 2004
40
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Agent-based Robotics control:
Hybrid layered architecture:
Reactive Agents for immediate action
Deliberative agents responsible for
advising about the plan to be execute
Learning basic competencies :
Simple neural networks,
Fuzzy rules
1 PhD Thesis submitted and several papers produced
LIACC - March 2004
41
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Agent-based Robotics control:
LIACC - March 2004
42
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Projects (1999-2001)
AVOEC: Agent-based platform for VE formation and
B2B EC
funding:FCT+FEDER finished 2001
MACIV:Multi-Agent System for Distributed resource
management
funding:FCT+FEDER finished 2000
AgentLink I (98-00) AMEC SIG
finished 2000
AgentLink II (00-02)
AMEC +ALAD SIGs
funding: European Union
FINESSE: Formalisation of Institutions and Norms for
Electronic Social Structures for Exchange
submitted
Inter-Network (EUNET, ILPNET, AgentLinkII) SIG on
"Agents that Learn, Adapt and Discover funding:E.U.
LIACC - March 2004
43
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Projects (2002-2004)
LEMAS: Learning in MASystems in the RoboCup SLLeague
Funding: FCT+FEDER(03-04)
FCPortugal: New Coordination Methodologies applied to the
Simulation League
Funding: FCT+FEDER(03-04)
AgentLink III
AMEC +ALAD SIGs
Funding: European U. (03-)
PORTUS: A common framework for cooperation in Mobile
Robotics
Funding: FCT+FEDER(02-05)
OPEN: Open Platform for Enterprise Network – submitted to E.U.
LIACC - March 2004
44
NIAD&R
Distributed Artificial Intelligence & Robotics Group
International links
Member of the Editorial Board of the AAMAS Journal
ed. Kluwer AP, (EO)
Member of the European Board of IOS Press and
Omsha Ltd “Frontiers in AI and Applications” Series for
European dissertations (EO)
Member of Technical Committee of the RoboCup
Simulation League (LPR)
Exchange of students+researchers under Socrates
Program (U.Trier/G, Imperial College/UK, City
College/UK, ENM SaintEtienne/Fr)
Research Evaluation at Univ. J.Fourrier-Grenoble/Fr
“Coordination and Cooperation” in MAS Robo Cup-SIG
LIACC - March 2004
45
NIAD&R
Distributed Artificial Intelligence & Robotics Group
International links
DFKI-Germany (KlausFisher, Mathias Klush)
Imperial College/Univ.London (A.Mamdani)
Czech Technical University (V.Marik, O.Stepankova)
U.Southampton (N.Jennings, M.Luck)
Lab. Leibnitz- IMAG (Dr. Y.Demazeau)
Univ. Utrecht (F.Dignum)
Université de Technologie de Compiègne (J.P.Barthés)
École National des Mines Saint-Etienne (O.Boissier)
Institut Inteligencia Artificial, Barcelona (C.Sierra)
QMWC/U.London (N.Jennings)
LIACC - March 2004
46
NIAD&R
Distributed Artificial Intelligence & Robotics Group
International links
Univ. São Paulo (J.Sichman)
Pontifícia Univ. Católica Paraná (M.Schmeil)
Univ. Bath (J.Padget)
Univ. Federal Rio Grande do Sul (A.Bazzan)
Univ. of Trier/Germany (N.Kuhn)
Xerox Research Centre in Europe, (J.M.Andreolli)
Achmea, Netherlands (V.Dignum)
LIACC - March 2004
47
NIAD&R
Distributed Artificial Intelligence & Robotics Group
National links
Faculdade de Ciências Univ. Lisboa (Prof.H.Coelho)
Instituto Superior Técnico, U.T.Lisboa (Drª. A.Paiva)
FCT- Univ. Nova de Lisboa (Prof. A.Garção)
IEETA- Univ. Aveiro (Dr. L.Seabra Lopes, Dr. N.Lau)
INESCPorto (Prof.M.Matos)
ISR Porto (Dr.A.PMoreira, Dr. P.Costa)
CEMAS-C.Modelação e Análise Sistemas Ambientais
(Prof. P.Duarte)
I2S- Integrated Systems Software Company(A.Lhamas)
Guião (J.A.Alves)
Mota&Companhia (Civil Construction)
Univ. Beira Interior (DrªP.Prata)
LIACC - March 2004
48
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Weak points:
Difficult to keep fruitful links with industry
Not enough publications in Journals
Robotics not enough attractive for software
people
“Strong” points:
EI and Agent-based Negotiation for EC and VO
Sophisticated prototypes have been released
Good results in competitions by using agent-based
team coordination
New research directions like “emotion-based” agents
and MAS Learning
LIACC - March 2004
49
NIAD&R
Distributed Artificial Intelligence & Robotics Group
Future Directions:
More efforts on:
Multi-agent Learning
Emotion-like Agents Architectures
General framework for Electronic Institutions including
Ontology related Services and Electronic Contracts
More efforts on the Applications:
Adaptive Negotiation Electricity e-Market
Simulation Tool for fire-combat training
Application of EI to a real-life domain
To keep a fair balance between Research and Applications
LIACC - March 2004
50
Download