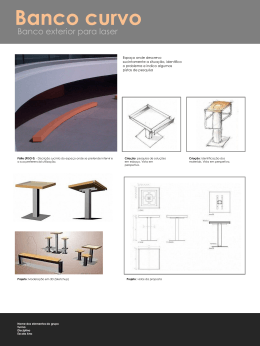
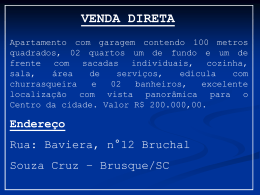
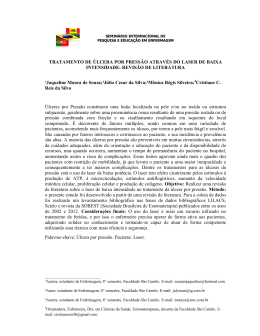
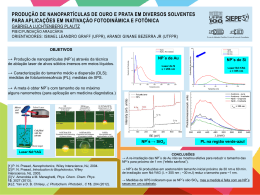
Anais do 12O Encontro de Iniciação Científica e Pós-Graduação do ITA – XII ENCITA / 2006 Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, Outubro, 16 a 19, 2006 Técnicas de Controle Digital para Lasers Semicondutores Marcelo Fernando Iguchi Instituto Tecnológico de Aeronáutica - Praça Marechal Eduardo Gomes, 50 - Vl. das Acácias, CEP 12.228-900 - São José dos Campos - SP [email protected] Neusa Maria Franco de Oliveira Instituto Tecnológico de Aeronáutica - Praça Marechal Eduardo Gomes, 50 - Vl. das Acácias, CEP 12.228-900 - São José dos Campos - SP [email protected] Ricardo Teixeira de Carvalho Instituto de Estudos Avançados - Rod. Dos Tamoios, km 5,5 - Torrão de Ouro, CEP 12.228-970 - São José dos Campos - SP [email protected] Resumo. Este trabalho descreve a implementação de um sistema de controle digital para lasers semicondutores. O objetivo do trabalho é estabilizar a potência de luz emitida, controlando a corrente que circula pelo mesmo, e a mesma técnica pode ser estendida ao controle de outros parâmetros do laser, tais como a temperatura e o comprimento de onda da luz emitida. Também discutimos sobre os circuitos analógicos de interface auxiliares para condicionar os sinais a níveis adequados de operação funcional do controle, bem como sobre o firmware de controle residente no microcontrolador, para fechar a malha de controle digital. Resultados experimentais são apresentados. Palavras chave: diodo laser, laser semicondutor, microcontrolador, controle digital. 1. Introdução Com o acelerado desenvolvimento da tecnologia dos dispositivos opto-eletrônicos nas últimas décadas a utilização de lasers semicondutores cresceu amplamente. Dessa forma, é necessário que se tenha um controle digital destes dispositivos em aplicações onde a potência óptica, a corrente aplicada e/ou o espectro de emissão possam ser estabilizadas e controladas, a fim de que seja possível operá-los com eficiência e segurança tanto do ponto de vista eletrônico quanto humano, uma vez que lasers podem ser potencialmente perigosos à saúde. Lasers semicondutores são aplicados em diversos campos, como na comunicação de dados e voz, nos leitores/gravadores de CD/DVDs, sensores inerciais a fibra óptica (Carvalho, 1996 e Shigueru Oho et al, 1995), equipamentos médicos, e instrumentos de medição entre outros. Em particular, a estabilização da potência emitida pelo laser é muito importante para a sua aplicação em sensores. Como exemplo, citamos um sensor interferométrico (Carvalho, 1996), aonde podemos mensurar indiretamente uma grandeza física que afete a fase e/ou a amplitude do campo elétrico na guiagem da luz em um dos braços do interferômetro. A potência medida no fotodetector conteria informação para inferirmos esta grandeza, mas este sinal é também proporcional a potência óptica originalmente emitida pela fonte. Se esta estiver variando com o tempo, não saberíamos se a flutuação total resultante observada no sinal do interferômetro vem desta variação indesejada, ou vem devido à variação da grandeza que se quer medir. Assim , a estabilização da potência serviria como uma das maneiras de se viabilizar esta classe de sensores. Só para mensurar este efeito indesejável de aumento do erro no sensor devido à flutuação da potência óptica, damos um exemplo com um giroscópio à fibra óptica (interferômetro de Sagnac). O erro adicional de medida na taxa de rotação devido a este efeito é muitas vezes maior do que o erro mínimo do giro, causado por outros fatores físicos, erro mínimo esse se não tivéssemos esta flutuação na potência. O erro total no sensor é de vital importância e deve ser minimizado ao máximo, pois este determina a menor taxa de rotação mensurável, e esta é integrada matematicamente três vezes em um sistema de navegação inercial, de modo que para um vôo longo o erro estimado de trajetória se torna colossal, mesmo para pequenos erros na taxa de rotação. Como exemplo, assumimos aqui, para efeito de cálculo, que o nosso giro medisse uma taxa de rotação de (1 ±0.0003) grau/s na ausência desta flutuação de potência. Uma flutuação de apenas ±1% na potência óptica faria com que esse mesmo giro medisse (1 ±0.01) grau/s. O erro aumentaria então de mais de 30 vezes só devido a isso, se não atuamos na estabilização da potência. Seria desejável, então, um controle preciso melhor que 0.1% em estabilidade em torno do set point. Outra maneira seria medir esta potência e normalizar o sinal de saída, porém abordagem de controle permite melhor precisão e, uma vez efetiva para a potência óptica, pode ser estendida para a estabilização de outros parâmetros do laser, tais como a temperatura e o comprimento de onda da luz emitida. A potência óptica emitida varia porque o processo de geração de fótons via corrente elétrica, que acontece em lasers semicondutores, é um processo fortemente dependente de temperatura ambiente/temperatura de junção, e de flutuação da corrente de alimentação do laser. Ora, uma estabilização direta do parâmetro desejado, que é a potência Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006 , óptica, se faz vantajosa em relação à estabilização direta de ambas temperaturas e corrente via malha dupla de controle. Aqui ressaltamos, porém, que ao estabilizarmos só a potência óptica diretamente, o fazemos sem levar em conta flutuações eventuais do comprimento de onda emitido, importante como referência em medidas envolvendo diferenças de fase óptica. Nesses casos, então, potência e comprimento de onda devem ser estabilizados, e um controle digital bivaríável, que mexa em ambas temperatura e corrente, poderá, dentro de um certo domínio de valores admissíveis desejados e que haja estabilidade do controle assim descrito, produzir a estabilidade simultânea de potência e comprimento de onda. Tal abordagem também se beneficia da discussão feita neste trabalho. Este trabalho está sendo desenvolvido como parte de um projeto envolvendo uma rede de microcontroladores de dimensões físicas reduzidas, para realizar simultaneamente multitarefas de controle e supervisão com alto desempenho (Iguchi et al., 2005). Uma das tarefas a serem realizadas por um dos microcontroladores da rede é o controle de lasers. O controle do laser semicondutor é realizado através de uma malha fechada de controle onde o programa presente no microcontrolador analisará a realimentação a fim de avaliar a decisão necessária para o sistema atuador, dessa forma, consistindo o trabalho em desenvolver o circuito de controle envolvendo eletrônica analógica e digital, programar o microcontrolador e realizar a análise do sistema. A organização do trabalho está dividida da seguinte forma: Na seção 2 são descritas as principais características do microcontrolador e do laser semicondutor; na seção 3 é explicado o modo de implementação do sistema de controle digital; na seção 4 são apresentados e discutidos os resultados obtidos e na seção 5 são apresentadas as conclusões relativas as tarefas já desenvolvidas. 2. Laser e microcontrolador O laser semicondutor ou diodo laser utilizado é fabricado pela Sanyo, com potência de saída de dezenas de miliwatts, comprimento de onda de 785nm, possuindo um fotodetector interno ao laser que será utilizado para a realimentação do sistema. Por ser um dispositivo sensível a variações bruscas de tensão, corrente, sobre tensão e tensão reversa, alguns circuitos de proteção tiveram que ser projetados e serão explicados na próxima seção. O microcontrolador utilizado para o desenvolvimento deste trabalho é o C8051F300 da Silicon Laboratories que utiliza o núcleo do 8051, originalmente fabricado pela Intel, com todas as características do dispositivo original, acrescidas de algumas melhorias como a integração de conversor analógico-digital de 8bits, comparadores de tensão, contadores adicionais, saídas de modulação de largura de pulso (PWMs), 256 bytes de memória RAM e 8kbytes de memória FLASH, oscilador interno de 24.5MHz, interface SMBus, UART aprimorada, capacidade de depuração de software no próprio sistema e dimensões físicas reduzidas (Fig. 1). Este microcontrolador foi escolhido para este trabalho principalmente devido as suas dimensões físicas reduzidas, possui encapsulamento MLP-11 (3x3mm), aliado ao núcleo do 8051, visto que a tarefa desempenhada pelo sistema é parte integrante de uma rede de microcontroladores para sistemas embarcados com forte restrição física de espaço. O projeto foi desenvolvido utilizando-se de um kit de desenvolvimento da Silicon Laboratories (C8051F300-DK), onde é possível a monitoração de todos os sinais, variáveis e registradores envolvidos na execução do trabalho. Figura 1. Diagrama dos blocos internos do C8051F300. Fonte: Datasheet C8051F300. Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006 , 3. Implementação do sistema O presente trabalho propõe-se a implementar um controlador digital de laser semicondutor. Para isto iniciaremos com a caracterização do laser, passando pela eletrônica analógica, desenvolvimento de software, integração e testes do sistema. 3.1 Eletrônica analógica A Fig. 2 apresenta o diagrama de blocos do sistema projetado: Figura 2. Diagrama de blocos do sistema de controle do laser. O primeiro experimento a ser realizado para a concepção do sistema foi o levantamento das características do laser semicondutor, cujos resultados servirão de entrada para os cálculos realizados pelo microcontrolador. Nesse experimento foram levantadas as curvas de potência óptica em relação a corrente do dispositivo e da tensão de realimentação do fotodetector em relação a corrente do laser. No último, foi necessária a introdução de um amplificador de transimpedância antes de realizarmos a medição de tensão, pois a saída do fotodetector do diodo laser se dá em corrente. Foram ainda desenvolvidos circuitos de proteção utilizando-se diodos, diodos zener e capacitores para proteger o laser contra sobre corrente, inversão de tensão, e variações bruscas de tensão e corrente. Para o condicionamento do sinal proveniente da saída modulada por largura de pulso (PWM) do microcontrolador, foi elaborando um circuito inversor de nível lógico, uma vez que quando o microcontrolador é energizado, as suas portas vão para nível lógico alto, impondo dessa maneira uma corrente máxima para o laser. Ao se colocar o circuito inversor isto não ocorre. O filtro passa baixas (filtro RC na Fig. 2), foi calculado com uma freqüência de corte de 5Hz, para transformar o sinal do PWM, com freqüência de 8kHz em um nível de tensão contínua. Também a fim de preservar a integridade do laser foi elaborado um circuito sensor de corrente do laser, pois o chaveamento para a amostragem de corrente em um amperímetro digital poderia ser potencialmente danoso ao diodo laser. O circuito consiste em um amplificador diferencial com um ganho G = 10,644 cuja saída se dá em tensão proporcional à corrente do laser. Ao realizarmos a multiplicação do valor lido na saída pelo ganho tem-se a corrente do laser. 3.2 Eletrônica digital Para completar a descrição dos blocos da Fig.2, nesta seção será descrito o funcionamento do programa presente no microcontrolador, cujo fluxograma é ilustrado na Fig. 3. Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006 , Figura 3. Fluxograma do programa presente no microcontrolador. O programa consiste em realizar aquisições utilizando-se do conversor análogo-digital presente no dispositivo, efetuar uma média simples com 256 valores, comparar o resultado desta média com um valor pré-determinado (set point) armazenado em um registrador e incrementar ou decrementar o valor do PWM a para estabilizar a potência do laser semicondutor. Para reduzir a instabilidade do sistema foi adicionada uma rotina de retardo assim como uma faixa de valores de ±1 valor hexadecimal em relação ao valor pré-determinado (histerese). A histerese consiste em uma faixa de valores em torno do valor set point, onde a potência do laser semicondutor é aceita como a potência desejada. O valor pré-determinado em notação hexadecimal de comparação do sistema foi obtido através da Eq. (1), cujo valor Vin representa o dado obtido no experimento de caracterização do diodo laser, Vref+ e Vref-, representam os valores de tensão de 3,3V e 0V respectivamente, n é o número de bits da conversão do microcontrolador, neste caso 8bits e Vd é o valor pré-determinado em notação decimal que depois será convertido em notação hexadecimal e armazenado no programa. Vd = Vin − Vref − Vref + − Vref − * 2n (1) Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006 , 4. Resultados Nesta seção serão mostrados os resultados práticos obtidos com os ensaios citados na seção anterior, assim como o cálculo realizado para obter o valor de referência para comparação do microcontrolador. 4.1 Caracterização do laser semicondutor O experimento foi realizado utilizando-se de uma fonte de tensão como substituta da saída PWM do microcontrolador conforme o sistema já exposto na Fig. 1, medindo-se dessa forma tanto a corrente quanto a potência óptica de saída do laser semicondutor. O resultado é ilustrado na Fig. 4. 1,60E-03 1,40E-03 Pot. O ptica (W ) 1,20E-03 1,00E-03 8,00E-04 6,00E-04 4,00E-04 2,00E-04 0,00E+00 0 0,005 0,01 0,015 0,02 0,025 0,03 I Laser (A) Figura 4. Resultado da caracterização do laser semicondutor. O gráfico da Fig. 5 foi levantado no mesmo experimento anterior e ilustra a tensão de realimentação do sistema em relação à corrente do laser semicondutor. 4,5 Tensão de Realimentação (V) 4 3,5 3 2,5 2 1,5 1 0,5 0 0,005 0,01 0,015 0,02 0,025 0,03 Corrente do Laser (A) Figura 5. Gráfico ilustrando a tensão de realimentação do laser semicondutor em relação à corrente do dispositivo. Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006 , 4.2 Cálculo do valor de referência Tomando como base o gráfico da fig. 5, para uma corrente de 23mA do laser semicondutor, temos um valor de realimentação de 0,9V na entrada do conversor análogo-digital. Empregando a Eq. 1, e considerando Vin = 0,9V, temos que Vd resulta no valor decimal de 69,8. Convertendo-o para a notação hexadecimal temos que Vd = 45H. Este resultado obtido foi então o valor de referência adotado (set point) do sistema de controle de potência do laser, para efeito de testar o sistema. Procuramos exemplificar com um set-point de baixa potência óptica para evitar testar o sistema com potência elevada, de modo a se prevenir contra acidentes pessoais de manuseio do laser no laboratório. O valor foi inserido no código do programa, e o sistema apresentado na Fig. 1 foi testado. O resultado do teste pode ser ilustrado na Fig. 6, que é a forma de onda do PWM depois do estágio de inversão de nível lógico. Figura 6. Forma de onda da saída do PWM do microcontrolador depois do estágio de inversão. Alguns problemas relativos à instabilidade no controle de potência do laser semicondutor, tais como a variação excessiva da potência do laser, foram resolvidos com a adequação dos tempos de retardo no programa do microcontrolador, e com a adição de um capacitor na entrada do conversor análogo-digital. 4.3 Comparações com um sistema com malha aberta Realizaremos nesta seção algumas comparações do sistema de controle microcontrolado com um sistema com malha aberta Para o sistema com malha aberta, foi colocado na entrada do sistema, no lugar da saída PWM do microcontrolador, um gerador de funções com uma onda quadrada cujas características são semelhantes ao sinal do microcontrolador com um ciclo de trabalho de 58,8%. Para esta caracterização mediu-se uma variação na realimentação do sistema (entrada A/D do microcontrolador) de 2,95mV. Já para o sistema de controle microcontrolado com a malha fechada, houve uma variação de 1,5mV. Considerando que a precisão do conversor análogo-digital é dada pela Eq. 2: V= Vref + − Vref − 2n (2) Onde: V = precisão do conversor análogo-digital, Vref+ = 3,3V, Vref- = 0V e n = 8bits. Realizando os cálculos utilizando a Eq.1 tem-se que a precisão do bit menos significativo do conversor análogodigital é de 11,7mV. O erro percentual pode ser calculado se linearizarmos a curva de potência em torno do ponto de trabalho aplicando a equação: Anais do XII ENCITA 2006, ITA, Outubro, 16-19, 2006 , δP P = ∂V *100 V Onde: δP P (3) é a variação de potência percentual, δV é a variação de tensão (1,5mV) e V é o nível médio do PWM (2,05V). Cujo resultado é de 0,073%, menor que 0,1% proposto. 5. Conclusões Considerando os resultados apresentados na seção 4.3 o sistema comportou-se da maneira esperada, mantendo-se dentro da faixa de tolerância dos erros calculados. Tanto a faixa de histerese quanto o set-point do sistema podem ser facilmente alterados se necessários, bastando apenas algumas alterações no software presente no microcontrolador. No sistema completo da rede de microcontroladores, onde cada dispositivo desempenha uma função, tais parâmetros poderão ser alterados utilizando-se a comunicação entre os dispositivos da rede. Para completar o desenvolvimento da rede de microcontroladores, será implementado o protocolo de comunicação, bem como as demais tarefas dos demais microcontroladores pertencentes à rede. 6. Agradecimentos Realizamos os ensaios nos laboratórios da Divisão de Física Aplicada (EFA) do Instituto de Estudos Avançados (IEAv), conjuntamente com o Instituto Tecnológico de Aeronáutica (ITA), e contamos ainda com o apoio do Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq). 7. Referências Carvalho, Ricardo T. de.,1996, “Sagnac Interferometry for Accurate Sensing of Non-Reciprocal Effects. Texas A&M University”, 127p. Iguchi, Marcelo F., Shibuya, Lídia H.,de Oliveira, Neusa M. F. e Carvalho Ricardo T. de, 2005, “Redes de Microcontroladores para Gerenciamento Distribuído de Funções em Eletrônica Embarcada de Sensores Inerciais para Sistemas de Defesa”, VII Simpósio de Guerra Eletrônica (VII SIGE), São José dos Campos. Oho, Shigueru, Kajioka, Hiroshi and Sasayama, Takao, 1995, “Optical Fiber Gyroscope for automotive Navigation”, IEEE Transactions on Vehicular Technology, vol. 44, no. 3, pp 698-705 Silicon Laboratories, Datasheet do C8051F30X. Acessado em março/2006. [on-line]. <http://www.silabs.com/public/documents/tpub_doc/dsheet/Microcontrollers/Small_Form_Factor/en/C8051F30x.pd f>
Download