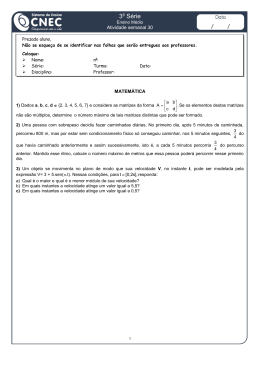
FILTRAGEM DE SISTEMAS DINÂMICOS NÃO-LINEARES COM APLICAÇÃO EM PLATAFORMA DE MOMENTO GIROSCÓPICO R ENATA C. M. C HUPEL∗, P EDRO H. T. M. DA F ONSECA∗, R ENATO A. B ORGES∗ ∗ Departamento de Engenharia Elétrica, Universidade de Brasília – UnB, 70910-900, Brasília, DF, Brasil Emails: [email protected], [email protected], [email protected] Abstract— In this paper, the problem of robust filter design for time-invariant continuous-time systems is investigated in the context of absolute stability. The filter is obtained in order to guarantee that the augmented system (filter connected to the plant) is absolute stable with respect to a cone bounded class of nonlinearities. The design conditions obtained by means of Lyapunov functions are expressed as linear matrix inequalities. Uncertainties in the system are also considered using polytopic models. A complete order filter is obtained by the solution of an H∞ optimization problem. A practical application on a platform of moment gyroscope is provided. Keywords— Robust filtering; Absolute stability; Lyapunov functions; Linear matrix inequalities. Resumo— Neste artigo, o problema de projeto de filtros para sistemas contínuos e invariantes no tempo é investigado no contexto de estabilidade absoluta. O filtro é obtido de tal forma a garantir que o sistema aumentado (filtro acoplado à planta) seja absoluto estável em relação a uma classe de não-linearidades limitadas em um cone. As condições de síntese obtidas por meio de funções de Lyapunov são expressas como desigualdades matriciais lineares. Incertezas no sistema também são consideradas utilizando modelos politópicos. Um filtro de ordem completa é obtido solucionando um problema de otimização H∞ . Uma aplicação prática em plataforma de momento giroscópico é apresentada. Palavras-chave— Filtragem robusta; Estabilidade absoluta; Funções de Lyapunov; Desigualdade matriciais lineares. 1 Introdução O conceito de estabilidade absoluta de um sistema dinâmico, introduzido por Lur’e e Postnikov na década de 40 (Hinrichsen e Pritchard, 2011), estabelece condições para a análise das trajetórias de um sistema cuja malha de realimentação é dada por uma função não-linear desconhecida. Para uma classe de nãolinearidades invariantes no tempo1, N : Kq 7−→ Kℓ , diferenciável na origem com N(0) = 0, e satisfazendo a condição global de Lipschitz, o ponto de equilíbrio nulo do sistema ẋ(t) = Ax(t) é dito estável no sentido absoluto em relação a um conjunto de perturbações D, se o sistema ẋ(t) = Ax(t) + BN(Cx(t)), t ≥ 0 for globalmente assintoticamente estável para todo N ∈ D. O estudo de estabilidade deste tipo de sistema ficou conhecido na literatura como problema de Lur’e, e provavelmente os resultados mais conhecidos apresentados até hoje são a conjectura de Aizerman, a conjectura de Kalman, o critério do Círculo e o critério de Popov (Khalil, 2002; Haddad e Chellaboina, 2008). Para as duas conjecturas, contra-exemplos mostraram que no caso geral elas não são válidas, como em sistemas dinâmicos com atratores ocultos, os quais possuem bacia de atração que não se intercepta com pequenas vizinhanças do ponto de equilíbrio (Leonov e Kuznetsov, 2013). Já os critérios do Círculo e de Popov constituem dois importantes teoremas que fornecem condi1K representa o campo dos Complexos ou Reais. ções suficientes para a estabilidade absoluta de sistemas dinâmicos com não-linearidades limitadas em setor (Khalil, 2002; Haddad e Chellaboina, 2008; Hinrichsen e Pritchard, 2011), constituindo a base fundamental para os principais resultados vistos recentemente na literatura. No contexto de síntese de filtros e controladores para sistemas da engenharia, a estabilidade absoluta representa uma linha de investigação importante, pois ao considerar o estudo de sistemas dinâmicos nos quais o operador de realimentação não precisa ser explicitamente caracterizado, mas apenas sua classe bem definida, permite representar e tratar de forma conveniente a modelagem de diferentes tipos de perturbações ou incertezas no modelo. Dentre os exemplos mais conhecidos, destacam-se a representação dos efeitos de zona morta e saturação de sinais (Yang e Li, 2009; da Silva Jr. et al., 2013; Shi et al., 2013), e um caso talvez não tão comum, porém muito interessante, apresentado no contexto de análise numérica em (Kashima e Yamamoto, 2007). Recentemente, os trabalhos sobre estabilidade absoluta tem se concentrado em fornecer condições de análise e síntese para diferentes classes de nãolinearidades, por exemplo (Gomes da Silva Jr. e Tarbouriech, 2005) considera um setor específico para não-linearidades do tipo zona-morta, utilizado para síntese de controladores por realimentação dinâmica de saída em (da Silva Jr. et al., 2013); para diferentes tipos de funções de Lyapunov, quadráticas ou do tipo Lur’e (de Oliveira et al., 2002); e com estimação e otimização da bacia de atração do ponto de equilíbrio (Gonzaga et al., 2012). No entendimento dos autores, a maior parte dos resultados apresentados até o presente momento encontra-se dividida em dois grupos principais de problemas: análise de estabilidade e síntese de controladores. Extensões para o problema de filtragem absoluta, de importância inquestionável, pode se beneficiar de diversas contribuições apresentadas para síntese de controladores absolutos, e em alguns casos ainda carece de resultados semelhantes. Neste artigo, o problema de filtragem de sistemas não-lineares do tipo Lur’e é investigado. Condições de síntese de filtros dinâmicos tal que o sistema aumentado (filtro acoplado à planta) seja absolutamente estável em relação a uma classe de não-linearidades limitadas em um cone, com um limitante superior para o desempenho H∞ garantido, são apresentadas. Diferentes classes de funções são considerada para o filtro e a planta, permitindo tratar não-linearidades nas duas estruturas separadamente. Extensões para o caso de sistemas incertos também são consideradas por meio de modelos politópicos, sendo possível aplicar relaxações polinomiais na busca de condições menos conservadoras. As condições de síntese propostas foram validadas no projeto de um filtro para estimar a velocidade angular de um dos eixos de rotação da plataforma de controle de momento giroscópico da Educational Control Products (modelo 750). Giroscópios são mecanismos formados por um rotor suspenso acoplado a dois eixos articulados com juntas do tipo gimbal. São instrumentos utilizados principalmente para medir ou manter uma orientação, com aplicações essenciais em equipamentos de localização, sendo amplamente utilizados no contexto de sistemas de navegação inercial, estabilização de veículos aéreos não tripulados (VANTs), orientação de veículos aquáticos, dentre outros. O princípio que rege seu funcionamento é a conservação do momento angular do sistema. Com os três eixos livres para girar, qualquer torque aplicado em um dos eixos resultará numa reação perpendicular que visa a manutenção do sentido de rotação do rotor. Dessa forma, é possível ter um referencial de orientação fixo, muito útil em diversas aplicações. Por exemplo, pode-se utilizar uma lei de controle para compensar qualquer torque aplicado em um dos eixos e garantir uma trajetória de interesse para um VANT. Neste contexto, a seguinte situação hipotética foi considerada, estimação da velocidade considerando a planta estabilizada e acesso à posição angular controlada do eixo em análise. No cenário em questão, o sinal de controle satura durante o transitório, e o filtro é projetado considerando esta característica não-linear da planta, ilustrando o resultado principal do artigo. em que x(t) ∈ IRn é o vetor de variáveis de estado, y(t) ∈ IRq a saída medida, z(t) ∈ IR p o sinal a ser estimado, e w(t) ∈ IRr um ruído externo com norma L2 limitada afetando a dinâmica e a saída da planta. As matrizes são reais, com dimensões apropriadas. As equações do filtro são dadas por ẋ f (t) = A f x f (t) + N f g(x f ) + B f y(t) z f (t) = C f x f (t) + M f g(x f ) (2) em que x f (t) ∈ IRn é o vetor de variáveis de estado do filtro e z f (t) ∈ IR p o sinal estimado. As matrizes do filtro são reais e com dimensões apropriadas. As funções f e g são não lineares, radialmente ilimitadas, pertencentes à classe de funções F (γ , δ ) = {x → f (x) = [ f1 (x1 ) . . . fn (xn )]′ : γi τ 2 < fi (τ )τ < δi τ 2 , 0 < γi ≤ 1 ≤ δi , fi (0) = 0} para todo i ∈ N∗ . Acoplando o filtro à planta, as equações que descrevem a dinâmica do sistema aumentado são ς̇ (t) = Ãς (t) + Ñ f˜(x(t)) + B̃w(t) e(t) = C̃ς (t) + M̃ f˜(x(t)) (3) em que ς (t) = [x(t)′ x f (t)′ ]′ , e(t) = z(t) − z f (t), f˜′ (x(t)) = [ f ′ (x(t)) g′ (x f (t))], e A Ã = BfC B̃ = 0 N , Ñ = Af Bf M 0 , Nf ′ L 0 B ′ , C̃′ = , M̃ = . −C′f −M ′f Bf D O problema a ser resolvido consiste em encontrar condições suficientes para síntese de filtros robustos do tipo (2) que assegurem que a dinâmica do sistema aumentado (3) seja absolutamente estável em relação à classe de não-linearidades F . O problema de filtragem a ser analisado pode ser definido conforme descrito a seguir. Problema 1 Encontre matrizes A f ∈ IRn×n , N f ∈ IRn×n , B f ∈ IRn×q , C f ∈ IR p×n e M f ∈ IR p×n do filtro (2), tais que a dinâmica do sistema aumentado (3) seja absolutamente estável em relação à classe de não-linearidades F , e um limitante superior µ do desempenho H∞ do erro de estimação seja garantido, ou seja, sup kwk2 6=0, w∈L 2 [0,∞) kek22 < µ 2, ∀ f ∈ F . kwk22 (4) 2 Preliminares e definição do problema 3 Estabilidade absoluta com desempenho H∞ Considere um sistema não-linear com t ∈ [0, ∞) ẋ (t) = Ax (t) + N f (x) + Bw (t) y (t) = Cx (t) + M f (x) + Dw (t) z (t) = Lx (t) (1) O lema a seguir apresenta uma condição suficiente para a análise de estabilidade absoluta de um sistema invariante no tempo com garantia de desempenho H∞ e será utilizado na solução do Problema 1. Lema 1 Dado um sistema não-linear invariante no tempo do tipo (1), matrizes diagonais ∆ ≻ 0 e Γ 0 (obtidas pela especificação do setor), uma matriz bloco diagonal Q ≻ 0, e um escalar positivo µ , se existir uma matriz simétrica W ≻ 0 (variável do problema) tal que2 ′ 0 M̃ ′ −Q Ñ W + 12 Q (Γ + ∆) ′ (⋆) Ã W + W Ã − Γ∆Q W B̃ C̃′ ≺0 Ξ := (⋆) (⋆) −µ 2 I 0 (⋆) (⋆) (⋆) −I (5) então o sistema (3) é absolutamente estável para todo f˜ ∈ F (γ , δ ) com um limitante superior para a norma H∞ dado por µ . Demonstração: Primeiramente será verificado que Ξ ≺ 0 implica na estabilidade absoluta do sistema (3) para ∀ f˜ ∈ F (γ , δ ). Para tanto, considere w = 0 e perceba que se Ξ ≺ 0 então ′ −Q Ñ W + 12 Q (Γ + ∆) ≺ 0. ′ (⋆) Ã W + W Ã − Γ∆Q Multiplicando a desigualdade acima à esquerda pelo vetor [ f˜′ x̃′ ] e à direita pelo seu transposto tem-se v̇(x̃) < f˜′ Q f˜ − x̃′ ΓQ f˜ − f˜′ Q∆x̃ + x̃′ ΓQ∆x̃ (6) com v(x̃) = x̃′W x̃. Além disso, para toda f˜ ∈ F(γ , δ ) segue que f̃i (x̃i ) − γi x̃i > 0 e f̃i (x˜i ) − δi x˜i < 0, logo n ∑ i=1 para ||w||22 6= 0, w ∈ L 2 [0, ∞), o que conclui a demonstração. A condição de análise apresentada no Lema 1 pode ser facilmente estendida para o caso de sistemas com incertezas modeladas por politopos, semelhante à condição apresentada no Teorema 2 em (Montagner et al., 2009), conforme será apresentado adiante. Vale mencionar que para o caso de sistemas precisamente conhecidos, a principal diferença do Lema 1 em relação ao Teorema 2 proposto em (Montagner et al., 2009) diz respeito à utilização da função de Lyapunov quadrática ao invés da função de Lyapunov do tipo Lur’e. Estas mudanças proporcionam vantagens algébricas na obtenção das condições de síntese de filtros com erro de estimação absolutamente estável. Além disso, diferente do proposto em (Montagner et al., 2009), o Lema 1 garante um limitante superior à norma H∞ do sistema. 4 Resultados principais O teorema a seguir apresenta uma condição suficiente para a síntese de filtros com erro de estimação absolutamente estável. Teorema 1 Dado um sistema não-linear do tipo (1), matrizes diagonais ∆11 ≻ 0, ∆22 ≻ 0 (obtidas pela especificação do setor), Q11 ≻ 0, Q22 ≻ 0 e um escalar positivo µ , se existirem (variáveis do problema) matrizes simétricas X, Z ∈ Rn×n , e matrizes E, G, R ∈ Rn×n , F ∈ Rq×n , S, M f ∈ R p×n tais que f̃i (x̃i ) − γi x̃i qii f̃i (x˜i ) − δi x˜i < 0, ∀qii > 0, que pode ser reescrito na forma matricial como ′ f˜(x̃) − Γx̃ Q f˜(x̃) − ∆x̃ < 0 que é exatamente a expressão no lado direito da desigualdade (6). Desta forma, tem-se que v̇(x̃) < 0 garantindo a estabilidade absoluta do sistema (3). Por último, para verificar a garantia de desempenho H∞ na presença de ruído (w 6= 0), multiplique a desigualdade Ξ ≺ 0 à esquerda pelo vetor [ f˜′ x̃′ w′ ] e à direita pelo seu transposto, o que fornece v̇(x̃) < µ 2 w′ w − e′ e. Integrando os dois lados da desigualdade acima e considerando condições iniciais nulas tem-se Z ∞ 0 v̇(x̃) dt < µ 2 Z ∞ w′ w dt − 0 Z ∞ e′ e dt ϒ := 2O símbolo (⋆) representa o bloco simétrico na matriz. T13 1R 2 T33 (⋆) (⋆) (⋆) ≻0 T14 G T34 T44 (⋆) (⋆) (7) 0 0 Z′B T45 −µ 2 I (⋆) 0 −M ′f T36 L′ 0 −I ≺0 então existe um filtro dado por (2), tal que o erro de estimação (3) é absolutamente estável para todo f˜ ∈ F (γ , δ ) com um limitante superior para a norma H∞ dado por µ . As matrizes do filtro são dadas por A f = (U ′ )−1 E ′YV −1 , B f = (U ′ )−1 F ′ , N f = (U ′ )−1 G′ , C f = SYV −1 , M f , 0 < µ 2 ||w||22 − ||e||22 ||e||22 < µ2 ||w||22 0 −Q22 (⋆) (⋆) (⋆) (⋆) Z X (8) ′ T13 = N Z + 12 Q11 ∆11 , T36 = L′ − S′ ′ ′ T14 = N X + M F + 12 Q11 ∆11 , ′ ′ ′ T33 = A Z + ZA, T34 = A X + C F + E + ZA ′ ′ T44 = A X + C F + XA + F ′C, T45 = XB + F ′ D 0 o que implica −Q11 (⋆) (⋆) (⋆) (⋆) (⋆) Z Z em que Y = Z −1 , V = (Q22 ∆22 )−1 RZ −1 , U = (V −1 − XZ −1V −1 )′ . Demonstração: Primeiramente defina as seguintes matrizes particionadas ′ ′ I I XU YV W= , W −1 = , K̃ = VY −1 0 V Ŷ U X̂ Q11 0 ∆11 0 Q= , ∆= . 0 Q22 0 ∆22 Em seguida, definindo Y = Z −1 e utilizando as equa′ ções XY + U V = I e UY + X̂V = 0 obtidas da identidade WW −1 = I, tem-se que o produto K̃ ′W K̃ fornece a LMI (7). Por último, definindo K = diag[I, K̃, I, I], e as mudanças de variáveis G = N ′f U, R = Q22 ∆22VY −1 , F = B′f U, ′ ′ E = Y −1V A f U, S = C f VY −1 em que V e U = (V −1 − XZ −1V −1 )′ satisfazem a iden′ tidade XY + U V = I, tem-se que ϒ em (8) pode ser escrito como ϒ = K ′ ΞK com Ξ definido em (5). Consequentemente, Ξ ≺ 0 se, e somente se, ϒ ≺ 0, o que de acordo com o Lema 1 garante a estabilidade absoluta do erro de estimação com um limitante superior para a norma H∞ dado por µ . As matrizes do filtro são obtidas pelas mudanças de variáveis definidas acima, o que conclui a demonstração. É importante mencionar que a minimização de µ sujeito às condições do Teorema 1 fornece o filtro dinâmico com o menor custo garantido H∞ assegurando a estabilidade absoluta do erro de estimação (3). Por último, considerando a representação de incertezas por meio de politopos convexos, ou seja, um conjunto compacto convexo com um número finito de pontos extremos (Grünbaum, 2003), o Teorema 1 pode ser estendido para tratar o caso no qual o sistema (1) possui incertezas descritas por um vetor de parâmetros α ∈ IRN pertence ao N-simplexo unitário ( ) ′ T13 = N(α ) Z + 21 Q11 ∆11 , T36 = L(α )′ − S′ ′ ′ T14 = N(α ) X + M(α ) F + 12 Q11 ∆11 , ′ T33 = A(α ) Z + ZA(α ), ′ ′ T34 = A(α ) X + C(α ) F + E + ZA(α ) ′ ′ T44 = A(α ) X + C(α ) F + XA(α ) + F ′C(α ), T45 = XB(α ) + F ′ D(α ). Para garantir a estabilidade absoluta do filtro robusto às incertezas politópicas projetado utilizando o Corolário 1, a nova LMI dependente de α deverá ser verificada para todo α ∈ UN . Apesar de neste caso o problema se tornar de dimensão infinita, o fato do vetor α estar contido em um N-simplexo unitário permite escrever condições suficientes descritas em função apenas dos vértices do politopo (Oliveira e Peres, 2007), (Bliman et al., 2006). Além disso, a interface ROLMIP (Agulhari et al., 2012), disponível para download gratuitamente no site dos desenvolvedores, já trata internamente este procedimento facilitando a implementação de LMIs dependentes de parâmetros. Condições menos conservadoras para o Corolário 1 podem ser obtidas utilizando relaxações polinomiais no parâmetro α , como por exemplo por meio de extensões do Teorema de Pólya muito utilizadas neste contexto (Oliveira e Peres, 2005), (Oliveira e Peres, 2007). 5 Simulações numéricas com aplicação em bancada de momento giroscópico A plataforma de análise e controle de momento giroscópico utilizada neste experimento possui 4 graus de liberdade referentes ao rotor central D e aos gimbals A, B e C, conforme pode ser visto na Figura 1. Por N UN := β ∈ IRN : ∑ βi = 1, βi ≥ 0 . i=1 Neste caso, a realização {A, N, B, C, M, D, L} do sistema é dada pela combinação convexa dos vértices do politopo conforme descrito abaixo A(α ) N(α ) B(α ) Ai Ni Bi N C(α ) M(α ) D(α ) = ∑ αi Ci Mi Di . i=1 L(α ) − − Li − − O corolário a seguir considera a síntese de filtros para sistemas com incertezas politópicas. Corolário 1 O Teorema 1 pode ser aplicado para fornecer filtros absolutamente estáveis do tipo (2) com custo garantido H∞ nos casos em que o sistema (1) possui incertezas descritas por politopos convexos. Para tanto, a LMI (8) deve ser alterada para −Q11 (⋆) (⋆) (⋆) (⋆) (⋆) 0 −Q22 (⋆) (⋆) (⋆) (⋆) T13 1R 2 T33 (⋆) (⋆) (⋆) T14 G T34 T44 (⋆) (⋆) 0 0 Z ′ B(α ) T45 −µ 2 I (⋆) 0 −M ′f T36 L(α )′ 0 −I ≺0 Rotor – peça A (eixo 1) Peça B (eixo 2) Peça C (eixo 3) N3 N1 N2 Peça D (eixo 4) Figura 1: Plataforma do giroscópio. construção da plataforma, todos os centros de massa estão localizados no centro geométrico do rotor D, o que permite desconsiderar os efeitos da gravidade e qualquer componente de dinâmica linear, reduzindo a análise do sistema à sua dinâmica angular. Ainda, no experimento realizado, o gimbal C foi mantido fixo por meio de um freio contido no mecanismo do giroscópio, o que permite aproximar a dinâmica do sistema por um modelo linearizado de ordem 3 cuja represen- angular ω4 . O setor considerado para o esforço de controle em função da variável de estado de interesse, x2 (t) = ω2 (t), pode ser visto na Figura 3. O filtro projetado ainda tolera eventuais não-lineares nas demais componentes do esforço de controle relacionadas com a posição angular q4 e velocidade ω4 desde que limitadas por um setor com inclinação 0.1 conforme especificação de projeto, embora apresente um erro maior durante o transitório. O resultado obtido para a tação no espaço de estados é dada por 0 q̇4 ω̇2 = 0 ω̇4 0 0 0 1 −JD Ω ID +KA +KB +KC 0 q JD Ω 4 1 (IC +ID )(ke2 /ke4 ) ω2 + (I +I )k k C D u2 e4 ω4 0 0 T2 em que q4 é a posição angular do gimbal 4, w2 e w4 as velocidades angulares dos gimbals 2 e 4 respectivamente, Ω a velocidade angular do rotor D, T2 o torque de B em C através do movimento do gimbal 2, ke2 e ke4 os ganhos estáticos dos encoders instalados no giroscópio, ku2 o ganho estático associado ao atuador do eixo 2 e IC , ID , JD , KA , KB e KC os momentos de inércia escalares nas respectivas direções (I na direção N1 , J na direção N2 e K na direção N3 ). A escolha das variáveis de estados q4 , w2 e w4 deve-se à configuração em análise, ou seja, movimento do eixo 4 com atuação pelo eixo 2. Para o sistema em análise, os valores dos momentos de inércia são dados por IC = 0.0092 kg.m2 , ID = 0.0148 kg.m2 , JD = 0.0273 kg.m2 , KA = 0.0667 kg.m2 , KB = 0.0297 kg.m2 e KC = 0.0221 kg.m2 , a velocidade angular do rotor D utilizada foi de Ω = 400 rpm, e os ganhos dos encoders e atuador respectivamente ke2 = 124256, ke4 = 81504 e ku2 = 9.0874 × 10−05 . Considerando o sistema estabilizado por uma realimentação de estados u(t) = [−4.5 0.072 − 0.22]x(t), o sistema foi excitado com um pulso unitário de largura 4s. Neste cenário, o sinal de controle satura em +/-10V durante o primeiro pico do transitório, vide Figura 2, e uma representação conforme (1) precisa ser utilizada para descrever a dinâmica do sistema. Logo, Esforço de controle versus velocidade angular 2 (w2) 45 Função esforço de controle vs velocidade borda superior do setor borda inferior do setor 40 35 esforço de controle 30 25 20 15 10 5 0 −5 0 20 40 60 80 velocidade w2 100 120 140 Figura 3: Não-linearidade limitada em setor. estimação de ω4 , implementado na plataforma, pode ser visto na Figura 4. Velocidade w4 estimada 100 80 Posição comandada e esforço de controle 600 10 0 200 −10 Contagens do encoder 400 tensão (volts) Contagens do encoder 60 40 20 0 −20 −40 −60 −80 degrau (posição comandada) esforço de controle 0 0 0.1 0.2 0.3 0.4 Tempo (segundos) 0.5 0.6 −20 0.7 Figura 2: Saturação na planta estabilizada. o sistema a ser considerado possui uma matriz dinâmica dada conforme acima, M e D são nulas, L é uma identidade, e as demais matrizes podem ser vistas a seguir 0 0 0 1 ′ N = −2118 33.9 −103.5 , C = 0 , 0 0 0 0 ′ B = 0 0.1 0 , L = 0 0 5 . O setor é definido pelas matrizes ∆11 = diag([0.1 0.3 0.1]), ∆22 = 10−7 diag([1 1 1]), e as matrizes Q11 e Q22 são variáveis do problema. O Teorema 1 foi aplicado para projetar um filtro absoluto em relação a saturação e robusto a eventuais perturbações na planta, que estime a velocidade −100 Velocidade estimada Velocidade medida 0 0.5 1 1.5 2 Tempo (segundos) 2.5 3 Figura 4: Velocidade ω4 estimada. As matrizes do filtro são dadas por 3.4347 A f = 107 3.8185 −1.9120 −0.5927 −0.6589 0.3299 −8.5506 B f = 106 −9.5062 , 4.7597 4.0172 C f = 392.2914 166.4833 −0.6932 −71.0701 −19.8862 4.9878 5.5451 , −2.7765 5.8337 539.9837 . 260.0109 No caso de N f e M f , os valores obtidos possuem magnitude desprezíveis, o que está de acordo com o fato de que o setor definido para g(x f ), dado por ∆22 , possui valor muito próximo de zero conforme pode ser visto acima. O limitante superior para a norma H∞ obtido minimizando µ sujeito às condições do Teorema 1 foi de 5.311 × 10−7, indicando uma boa característica robusta do filtro a pequenas perturbações. Por último, vale mencionar que a taxa de amostragem considerada foi de Ts = 0.00884s, o que de acordo com o fabricante é suficiente para tratar o sistema de forma contínua. 6 Conclusão Neste artigo, um procedimento de síntese de filtros contínuos no tempo para sistemas com nãolinearidades limitadas em setor tal que a dinâmica do erro de estimação seja absolutamente estável com desempenho H∞ garantido foi apresentado. A principal característica das condições propostas está no fato de que tanto o sistema quanto o filtro são considerados afetados por não-linearidades limitadas em uma região pré-estabelecida. Tal resultado foi obtido utilizando uma função de Lyapunov quadrática, que apresentou vantagens algébricas quando comparada com funcões de Lyapunov do tipo Lur’e no contexto do problema de filtragem considerado. Ressalta-se que da forma como foi considerado o projeto do filtro, a planta também precisa ser absolutamente estável. Extensões para o caso de sistemas incertos, com modelos politópicos para as incertezas, também foram consideradas. O filtro obtido é resultado da solução de um problema de otimização com restrições LMIs, em que um limitane superior da norma H∞ é minimizado. O experimento realizado ilustra o resultado principal apresentado no texto. Agradecimentos Às agências de fomento CAPES e CNPq, e ao DPP/UnB. Referências Agulhari, C. M., de Oliveira, R. C. L. F. e Peres, P. L. D. (2012). Robust LMI Parser: a computational package to construct LMI conditions for uncertain systems, XIX Brazilian Conference on Automation (CBA 2012), Campina Grande, PB, Brazil, pp. 2298–2305. Bliman, P.-A., Oliveira, R. C. L. F., Montagner, V. F. e Peres, P. L. D. (2006). Existence of homogeneous polynomial solutions for parameter-dependent linear matrix inequalities with parameters in the simplex, Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, pp. 1486–1491. da Silva Jr., J. M. G., Castelan, E. B., Corso, J. e Eckhard, D. (2013). Dynamic output feedback stabilization for systems with sector-bounded nonlinearities and saturating actuators, Journal of The Franklin Institute 350: 464– 484. de Oliveira, M. C., Geromel, J. C. e Hsu, L. (2002). A new absolute stability test for systems with state-dependent perturbations, International Journal of Robust and Nonlinear Control 12(14): 1209–1226. Gomes da Silva Jr., J. M. e Tarbouriech, S. (2005). Antiwindup design with guaranteed regions of stability: An LMI-based approach, IEEE Transactions on Automatic Control 50(1): 106–111. Gonzaga, C. A. C., Jungers, M. e Daafouz, J. (2012). Stability analysis of discrete-time Lur’e systems, Automatica 48: 2277–2283. Grünbaum, B. (2003). Convex polytopes, Graduate texts in mathematics, 2nd edn, Springer-Verlag, New York. Haddad, W. M. e Chellaboina, V. (2008). Nonlinear dynamical systems and control: a Lypunov-based approach, 1st edn, Princeton University Press, New Jersey. Hinrichsen, D. e Pritchard, A. J. (2011). Mathematical Systems Theory I: Modelling, State Space Analysis, Stability and Robustness, Vol. 48 of Texts in Applied Mathematics, 3rd printing edn, Springer. Kashima, K. e Yamamoto, Y. (2007). System theory for numerical analysis, Automatica 43: 1156–1164. Khalil, H. K. (2002). Nonlinear Systems, 3rd edn, Prentice Hall, Upper Saddle River, NJ. Leonov, G. A. e Kuznetsov, N. V. (2013). Hidden attractors in dynamical systems. From hidden oscillations in Hilbert-Kolmogorov, Aizerman, and Kalman problems to hidden chaotic attractor in Chua circuits, International Journal of Bifurcation and Chaos 23(1): 1330002 (69 pages). Montagner, V. F., Oliveira, R. C. L. F., Calliero, T. R., Borges, R. A., Peres, P. L. D. e Prieur, C. (2009). Robust absolute stability and nonlinear state feedback stabilization based on polynomial Lur’e functions, Nonlinear Analysis Series A: Theory, Methods & Applications 70(5): 1803–181. Oliveira, R. C. L. F. e Peres, P. L. D. (2005). Stability of polytopes of matrices via affine parameter-dependent Lyapunov functions: Asymptotically exact LMI conditions, Linear Algebra and Its Applications 405: 209– 228. Oliveira, R. C. L. F. e Peres, P. L. D. (2007). Parameterdependent LMIs in robust analysis: Characterization of homogeneous polynomially parameter-dependent solutions via LMI relaxations, IEEE Transactions on Automatic Control 52(7): 1334–1340. Shi, T., Su, H. e Chu, J. (2013). Reliable H-infinity filtering for linear systems with sensor saturation, Journal of Control Theory and Applications 11(1): 80–85. Sturm, J. F. (1999). Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones, Optimization Methods and Software 11(1–4): 625–653. http://sedumi.ie.lehigh.edu/. Yang, F. e Li, Y. (2009). Set-membership filtering for systems with sensor saturation, Automatica 45: 1896– 1902.
Baixar