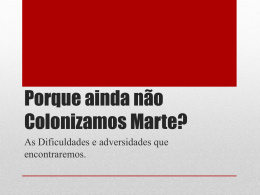
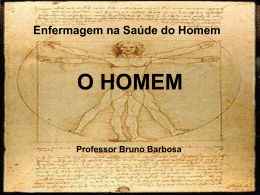
O PAPEL DA GEODÉSIA NA EXPLORAÇÃO DE MARTE Thiago Statella1 João Francisco Galera Monico2 1 Instituto Federal de Educação, Ciência e Tecnologia de Mato Grosso - IFMT Campus de Cuiabá – MT [email protected] 2 Universidade Estadual Paulista - UNESP Campus de Presidente Prudente – SP [email protected] Resumo A Geodésia é o ramo da ciência responsável pela medição e representação da Terra, bem como da determinação dos parâmetros de seu campo gravitacional. Porém, e curiosamente, esta definição não restringe a aplicação desta ciência aos limites de nosso planeta. Este artigo pretende mostrar que a Geodésia desempenha um papel fundamental na exploração de outros corpos do nosso sistema solar. Especificamente, são abordados os avanços e dificuldades na idealização e materialização do sistema de referencia geodésico de Marte, sem o qual jamais seria possível qualquer tentativa de se enviar àquele planeta uma missão tripulada. Introdução De tempos em tempos a comunidade científica renova seu interesse no planeta Marte e ameaça retomar a exploração espacial pela raça humana, aparentemente estagnada desde a última vez em que pisamos na Lua, em 1972, com a missão Apollo 17. Agora, agências espaciais da Europa e dos Estados Unidos começam, de maneira tímida, uma nova corrida espacial para colocar um astronauta no solo de Marte. A ESA (European Space Agency) divulgou que pretende enviar uma missão ao planeta em 2030. Na Rússia, voluntários testarão os efeitos do confinamento em uma viagem espacial simulada que pode durar cerca de 550 dias. Marte, cujo nome homenageia o deus da Guerra da mitologia romana, foi assim batizado por causa de sua coloração avermelhada, quando observado na faixa espectral do visível (porção do espectro eletromagnético na qual enxergamos), provocada pela abundante presença de óxido de ferro em sua superfície. Ele é conhecido e estudado desde a antiguidade: durante a Renascença seu movimento retrógrado serviu como evidência essencial ao modelo heliocêntrico de Copérnico para o sistema solar, e sua órbita relativamente elíptica levou Kepler a rejeitar o modelo de esferas concêntricas, antes proposto por Ptolomeu, em favor de órbitas elípticas para os planetas. Até o século 19, quando aconteceu o desenvolvimento de grandes telescópios, não era possível observar o planeta em detalhe. Mesmo então, as observações feitas da Terra davam uma idéia muito pálida da realidade física do planeta, levando pesquisadores a fazerem interpretações tão espalhafatosas que beiravam a ficção científica. Como exemplo, tempestades de areia eram interpretadas como mudanças na cobertura vegetal da superfície, e teorias sobre civilizações avançadas começaram a surgir (O’KEEFER, 2004). As origens de Marte são provavelmente muito similares às da Terra e algumas pesquisas sugerem que em seus primórdios ele pode ter sido muito mais quente, úmido e volto em uma atmosfera mais densa. Na Terra, evidência de vida pode ser encontrada em rochas com idade de quatro bilhões de anos. Superfícies em Marte com a mesma idade apresentam vestígios de lagos antigos, sugerindo que água líquida existiu ali em algum momento e que o clima era mais parecido com o da Terra. Futuras explorações podem revelar se algum tipo de vida se desenvolveu em Marte em algum ponto remoto de sua história, e também fornecer um melhor entendimento sobre eventos que a humanidade possivelmente enfrentará no futuro, conforme o desenvolvimento do planeta em que vive. Em resumo, se a ciência for capaz de entender os principais fatores que governam mudanças climáticas e a evolução de um planeta semelhante ao nosso, ela também será capaz de prever as consequências de mudanças naturais e induzidas pela raça humana na Terra (NASA, 1997). Dentre as inúmeras dificuldades impostas à exploração de outros planetas do nosso sistema solar está a necessidade de se conhecer em detalhes a forma e a dimensão dos corpos celestes que serão visitados. Na Terra, a ciência que se ocupa desta questão é a Geodésia (do grego “dividir a Terra”), que trata não só da medição e representação do nosso planeta, mas também da determinação dos parâmetros de seu campo gravitacional (GEMAEL, 1987). Embora, por motivos óbvios, a definição exata não se estenda a Marte, os mesmos fundamentos da Geodésia desenvolvidos e largamente utilizados no estudo da Terra são também aplicáveis àquele planeta. Neste trabalho objetiva-se apresentar os fundamentos de Geodésia factíveis de serem aplicados em Marte, visando sua exploração. A definição e realização de um referencial em Marte. Para o mapeamento da Terra, ou de Marte, a Geodésia se apóia em uma rede de pontos cujas coordenadas sejam conhecidas em um determinado sistema de referência. Semelhantemente aos sistemas de referencia relacionados com o planeta Terra, um Sistema de Referencia Fixo (SRFM) e um Sistema de Referência Inercial (SRIM), com origem no centro de Marte, podem ser definidos pela posição do centro de massa do planeta, pela orientação de seu eixo de rotação Z e por uma direção arbitrária para o eixo X. Para o SRFM o eixo X aponta na direção do meridiano principal de Marte, definido como sendo aquele passante pelo centro de uma pequena cratera nomeada Airy-0 (Figura 1) (DUXBURY et al., 2002). Figura 1: Cratera Airy-0, por onde passa o meridiano principal de Marte. Fonte: <www.msss.com/mars_images/moc/01_31_01_releases/airy0/index.html>. Acesso em: jun. 2010. A orientação do SRIM é definida de maneira análoga ao Sistema de Referência Inercial Terrestre (SRIT: eixo X aponta para uma posição muito próxima ao equinócio dinâmico, eixo Z aponta na direção do pólo de referência convencional e eixo Y forma o sistema dextrógiro, de acordo com Monico (2008)) apenas fazendo com que o eixo X aponte na direção do Equinócio Vernal de Marte (EVM). Uma alternativa é utilizar, em lugar do SRIM, o próprio SRIT definindo a orientação do vetor polar marciano em coordenadas no SRIT. A orientação do meridiano principal de Marte no espaço, para uma época qualquer, pode ser obtida atualmente com uma precisão da ordem de 100 m, graças às observações advindas dos instrumentos Mars Orbiter Camera (MOC) e Mars Orbiter Altimeter (MOLA), ambos embarcados na sonda Mars Global Surveyor (MGS), cujos dados coletados entre os anos de 1997 a 2006 ajudaram a produzir um mapeamento detalhado do planeta. Para medidas de posições na superfície do planeta, a MGS utiliza um sistema de coordenadas (XYZ) fixo à sonda e uma IMU (Inertial Mesurments Units) para medir sua atitude. A câmera MOLA, por sua vez, utiliza outro sistema de coordenadas que a relaciona ao sistema da sonda. O elipsóide de referência mais adequado para representação geométrica de Marte é biaxial, com centro geométrico coincidente com o centro de massa do planeta. Este elipsóide de referência possui raio equatorial a = 3.396.190 m, e um raio polar b = 3.376.200 m, ambos determinados com uma precisão de 100 m. A título de comparação, o elipsóide associado ao SIRGAS (Sistema de Referência Geocêntrico para as Américas), o GRS 80 (Geodetic Reference System 1980), possui raio equatorial a = 6.378.137 m e raio polar b = 6.356.752,31414 m (MORITZ, 1988). Com relação ao sistema de coordenadas, a União Astronômica Internacional (IAU no inglês) formalizou em 1970 o uso de dois tipos de sistemas para planetas: a) Sistema planetocêntrico, caracterizado por longitudes positivas ao leste (sistema dextrógero) e latitudes planetocênctricas, definidas como o ângulo entre o plano equatorial e uma linha partindo do centro do planeta até o lugar do “observador”; b) Sistema planetográfico, caracterizado por longitudes positivas na direção oposta àquela de rotação do planeta e latitudes planetográficas, definidas como o ângulo entre o plano do equador e a normal passante pelo lugar do “observador”. Duxbury et al. (2002) comentam que a maioria dos produtos cartográficos feitos entre 1970 e o final da década de 1990 usava o sistema planetográfico. Porém, o mapeamento mais preciso de Marte (2001), derivado de observações MOLA, utiliza o sistema planetocênctrico, e a tendência futura é que este sistema seja o adotado para especificação de coordenadas no planeta. No que diz respeito ao modelo geoidal do planeta vermelho, os primeiros modelos gravimétricos de Marte foram desenvolvidos com base em observações de suas luas, Phobos e Deimos. Posteriormente, os dados foram aprimorados pelo rastreio de sinais de rádio das sondas enviadas ao planeta, começando pela sonda Mariner 9. Atualmente, o melhor modelo do campo de gravidade Marciano (também chamado areóide) é o Goddard Mars Model 2B (GMM2B). Tal modelo foi desenvolvido pelo Godard Flight Center usando dados da missão Mars Global Surveyor (O’KEEFER, 2004). Na Figura 2 pode-se ver um mapa de anomalias da gravidade para a região conhecida como Valles Marineris. Um mapa planialtimétrico do planeta pode ser encontrado em: <http://74.125.93.132/search?q=cache:HPcNZPdivB8J:pubs.usgs.gov/ imap/i2782/i2782_sh2.pdf+gmm+2b&cd=10&hl=pt-BR&ct=clnk&gl=br> (Acesso em: jun. 2010). A realização do sistema de referência de Marte se dá através da construção do Mars Digital Image Model (MDIM). Sua versão mais atual realizada pelo USGS (United States Geological Survey) e nomeada MDIM 2.1 (Figura 3) está disponível em <http://astrogeology.usgs.gov/Projects/MDIM21> (Acesso em jun. 2010). O MDIM 2.1 é um mosaico de imagens Viking com resolução de 231m/pixel e substitui dois mosaicos antigos produzidos anteriormente pelo USGS a partir do mesmo conjunto de aproximadamente 4.600 imagens Viking. A precisão posicional das feições no MDIM 2.1 é de 200 m. Em comparação, essa precisão no MDIM 2.0 (realizado em 2001) era de 3 km e para o MDIM 1.0 (realizado em 1991) era pior que 6 km. Além do controle geodésico impreciso, as versões anteriores eram afetadas por algumas mudanças em parâmetros cartográficos, como exemplo, a definição da longitude 0°. O novo mosaico usa as definições e sistema de coordenadas mais recentemente adotadas pelo IAU/IAG 2000. Figura 2: Mapa de anomalias da gravidade obtidas com GMM 2B. Fonte: <http://denali.gsfc.nasa.gov/697/MARS/valles.mgm1004d.gif>. Acesso em: jun. 2010. Uma das razões que levaram a este significativo aumento da acurácia do mosaico foi a incorporação de 1.232 pontos de controle (além dos 1.054 pontos derivados de imagens Mariner 9 e 5.317 pontos advindos de imagens Viking) no terreno globalmente distribuídos cujas latitudes e longitudes foram injuncionadas a valores medidos a partir de dados MOLA. Com os dados deste instrumento também foi possível ortorretificar o mosaico, eliminando distorções causadas por paralaxe nas realizações anteriores. O mosaico global é dividido em 30 regiões baseadas nas séries cartográficas de Marte (USGS Mars Chart) de escala 1: 5.000.000. Todas as regiões foram mapeadas em projeção Equirretangular (ASTROGEOLOGY, 2009). Figura 3: Mosaico MDIM 2.1. Fonte: <http://astrogeology.usgs.gov/Projects/MDIM21>. Acesso em: jun. 2010. A solução da rede de controle de Marte conta com 90.204 observações de 37.645 pontos de controle espalhados em 6.371 imagens. Destas observações, 77.687 foram feitas sobre 5.317 imagens Viking, enquanto 12.517 observações foram feitas em 1.054 imagens Mariner 9. A Figura 4 mostra pontos de controle MOLA, medidos em grupo com espaçamento de 30° em longitude e 15° em latitude. Figura 4: Pontos de controle MOLA. Fonte: Archinal et al. (2003) Considerações finais Muito embora as definições dos sistemas de referência marcianos sejam praticamente idênticas às dos sistemas terrestres, a materialização destes sistemas no planeta vermelho ainda enfrenta várias limitações, visto que apenas recentemente se atingiu, para a rede de referência de Marte, uma precisão de cerca de 200 m, enquanto os sistemas mais recentes em vigência na Terra alcançam precisão de poucos centímetros. Esta é uma importante barreira à exploração de Marte, pouco lembrada, especialmente pelos meios de comunicação, nas discussões sobre as dificuldades de se organizar uma viagem tripulada àquele planeta. Para os pesquisadores e profissionais acostumados a lidar, em suas áreas de atuação, com problemas que envolvem a localização espacial, a constatação apresentada não é surpresa. Para o usuário comum, basta lembrar-se do transtorno causado por uma informação incorreta ou imprecisa fornecida pelo receptor GPS de seu veículo. Neste caso mais simples, o leitor pode tomar uma rua errada, chegar a um ponto sem retorno ou entrar em uma contramão. No caso de Marte, astronautas podem descobrir que erros causados pela imprecisão do sistema de referência os forçarão a pousar em banco de rochas ou numa cratera em vez de num mar de tranquilidade! Referências bibliográficas ARCHINAL, B. A. et al. Mars Digital Image Model (MDIM) 2.1 control network. In: ISPRS Working Group Workshop “Advances in Planetary Mapping 2003”, Houston, 2003. Anais do ISPRS Working Group Workshop “Advances in Planetary Mapping 2003”. ASTROGEOLOGY. <http://astrogeology.usgs.gov/Projections/MDIM21>. Acesso em: jun. 2010. DUXBURY, T. et al. Mars Geodesy/Cartography working group recommendations on Mars constants and coordinate systems. In: Symposium on Geopotential Theory, Processing and Applications, 2002. Anais do Symposium on Geopotential Theory, Processing and Applications. GEMAEL, C. Introdução à Geodésia Geométrica (1ª parte). Curitiba – PR: Ed. Universidade Federal do Paraná, 1987. MONICO, J. F. G. Posicionamento pelo GNSS: descrição, fundamentos e aplicações. 2ª ed. São Paulo - SP: Ed. UNESP, 2008. 476 p. MORITZ, H. Geodetic Reference System 1980. Bulletin Geodesique, v. 62, n. 3, 1988. NASA. Mars Global Surveyor Arrival. Press kit. Nasa, 1997. Disponível em: < http://mars.jpl.nasa.gov/missions/past/globalsurveyor.html>. Acesso em: jun. 2010. O’KEEFER, K. Simulation and Evaluation of the Performance of the Proposed Mars Network Constellation for Positioning, Orbit Improvement, and Establishment of a Spatial Reference Frame for Mars, 2004. Tese (Doutorado em Engenharia Geomática) – Universidade de Calgary, Canadá.
Baixar