UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA
ELÉTRICA
VIABILIDADE DA UTILIZAÇÃO DE MÁQUINAS DE
INDUÇÃO CONVENCIONAIS COMO MOTORES SEM
MANCAIS MECÂNICOS
VALCÍ FERREIRA VICTOR
Natal, RN – Brasil
Novembro / 2012
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA
ELÉTRICA
VIABILIDADE DA UTILIZAÇÃO DE MÁQUINAS DE
INDUÇÃO CONVENCIONAIS COMO MOTORES SEM
MANCAIS MECÂNICOS
VALCÍ FERREIRA VICTOR
Orientador: Prof. Dr. Sc. Andrés Ortiz Salazar – UFRN – CT – DCA.
Tese de Doutorado submetida ao corpo docente da
Coordenação do Programa de Pós-Graduação em
Engenharia Elétrica da UFRN como parte integrante
dos requisitos para obtenção do título de Doutor em
Ciências da Engenharia Elétrica.
Natal, RN – Brasil
Novembro / 2012
ii
Seção de Informação e Referência
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede
Victor, Valcí Ferreira
Viabilidade da utilização de máquinas de indução convencionais como motores
sem mancais mecânicos / Valcí Ferreira Victor. – Natal, RN, 2012.
141 f. : il.
Orientador: Andrés Ortiz Salazar.
Tese (doutorado) – Universidade Federal do Rio Grande do Norte. Centro de
Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. DSP – Tese. 2. Elementos Finitos – Tese. 3. Enrolamento Dividido – Tese. 4.
Motor de Indução Convencional – Tese. 5. Motor-mancal. 6. Rotor Gaiola de
Esquilo. I. Salazar, Andrés Ortiz. II. Universidade Federal do Rio Grande do Norte.
III. Título.
RN/UF/BCZM
CDU 621.313
À minha Ida, aos
meus, Rafael e
Karine.
iv
Agradecimentos
À Deus pela vida;
Ao Professor Andrés Ortiz Salazar, pessoa de valor inestimável;
Ao colega João Coelho de Sousa Filho, amigo da eletrônica;
Aos colegas Luciano e Soares pela companhia ao caminhar nos passos do Coelho, trabalho de
muitas mãos;
Ao colega José Álvaro pelas colaborações durante esses cinco anos;
Aos colegas Álvaro e Gabriel pelas colaborações com o DSP;
À Professora Ana Catarina, pela colaboração na elegância do texto deste trabalho;
À Professora Sylmara Barreira, pela colaboração com o idioma inglês;
À minha Gê, meu Rafael, minha Karine, por me amarem tanto;
À minha mãe, meu abrigo enquanto distante da minha família;
Ao IFTO, pelos incentivos aos servidores nas diversas áreas de pesquisas;
Ao CNPq, CAPES, e PPgEE pelo apoio Financeiro;
Aos que de alguma forma contribuíram à consecução deste trabalho.
v
Sumário
Lista de Figuras e Tabelas
x
Lista de Símbolos
xiv
Resumo
xviii
Abstract
xix
Capítulo 1 – Motores sem Mancais Mecânicos
1
1.1. Introdução
1
1.2. Motores sem Mancais Mecânicos
2
1.3. Motores-mancais de Indução
5
1.4. Justificativas e Objetivos
6
1.5. Sumário
7
Capítulo 2 – Forças Radiais nos Motores-Mancais de Indução
8
2.1. Introdução
8
2.2. Geração de Forças em Motores de Indução
9
2.3. Motor-Mancal Radial de Indução Tipo Duplo Enrolamento
12
2.4. Motor-Mancal Radial de Indução Tipo Enrolamento Dividido
13
2.5. Motores-Mancais Radiais de Indução – Tipos de Rotores
15
2.6. Simulação de Forças Radiais para Motor-Mancal Radial de Indução
19
2.7. Conclusões
20
Capítulo 3 – Modelo do Motor-mancal de Indução do Tipo
Enrolamento Dividido
vi
21
3.1. Introdução
21
3.2. Modelo da Máquina
21
3.2.1. Correntes do Rotor e Estator
22
3.2.2. Equações de Torque
23
3.2.3. Equações das Correntes de Magnetização
23
3.3. Modelo da Posição Radial
25
3.3.1. Modelo da posição para uma direção
25
3.3.2. Modelo da posição para três direções
28
3.4. Simulação de Forças Radiais para o Modelo
35
3.5. Conclusões
38
Capítulo 4 – Características do Motor de Indução para Aplicação
Motor-Mancal
39
4.1. Introdução
39
4.2. Tipos de Motores de Indução
40
4.3. Tipos de Alimentação
40
4.4. Tipos de Rotores
46
4.5. Modos de Operação
47
4.5.1. Motor monofásico
47
4.5.2. Motores trifásicos
50
4.5.2.1. Número e formação de polos no estator
50
4.5.2.2. Ligação do enrolamento dos motores de indução
52
4.6. Conclusões
57
Capítulo 5 – Implementação do Sistema Motor-mancal
vii
60
5.1. Introdução
60
5.2. O Motor-Mancal de Indução
61
5.3. Inversores de Frequência
66
5.4. Interface DSP/IGBT’s
67
5.5. Conversor CC – CA
68
5.6. Interface / Sensores de Corrente
68
5.7. Interface / Sensores de Posição
70
5.8. Descrição do Módulo eZdspTMF281®
73
5.8.1. Etapas para realização do controle de posição
75
5.8.2. Etapas para realização do controle de posição
75
5.8.3. Descrição do sistema de controle
75
5.8.4. Considerações sobre os controladores do sistema
76
5.8.4.1. Controlador de posição
76
5.8.4.2. Controlador de corrente
79
5.8.4.3. Operação dos controladores em cascata
80
5.9. Conclusões
82
Capítulo 6 – Resultados Experimentais
84
6.1. Introdução
84
6.2. Controladores de Correntes
84
6.3. Controlador de Posição Radial
86
6.3.1. Resultados da operação do motor-mancal
88
6.3.1.1. Operação motor-mancal – 60 Hz
89
6.3.1.2. Operação motor-mancal – 75 Hz
92
6.3.1.3. Operação motor-mancal – 30 Hz
94
6.3.1.4. Operação motor-mancal – 20 Hz
95
viii
6.4. Conclusões
96
Capítulo 7 – Conclusões Finais e Perspectivas Futuras
98
7.1. Conclusões Finais
98
7.2. Perspectivas de Trabalhos Futuros
99
Apêndice A. Determinação dos Parâmetros do Motor de Indução
100
Apêndice B. Diagrama de Circuitos das Interfaces
106
B.1. Circuitos das Interfaces de Corrente
106
B.2. Circuitos das Interfaces de Posição
106
B.3. Circuitos das Interfaces DSP/IGBT
106
Apêndice C. Listagem do Programa de Controle
107
Apêndice D. Referências dos Trabalhos Publicados
119
Referências Bibliográficas
120
ix
Listas de Figuras e Tabelas
Figura
Página
1.1
Diagrama esquemático do mancal magnético
3
1.2
Máquina com mancais magnéticos
3
1.3
Motor-mancal
4
2.1
Graus de liberdade do rotor
8
2.2
Estrutura para suspensão magnética: (a) com dois graus de liberdade; (b) com
cinco graus de liberdade
8
2.3
Forças de Maxwell e de Lorentz em um motor-mancal
10
2.4
Forças de Maxwell para corrente com frequência 60 Hz
11
2.5
Representação esquemática do fluxo magnético para um par de bobinas no
estator, máquina de quatro pólos
11
2.6
Motor-mancal do tipo duplo enrolamento – geração de força radial: (a) sentido
positivo do eixo x; (b) sentido negativo do eixo x
13
2.7
Motor-mancal do tipo enrolamento dividido – geração de força radial: (a)
sentido positivo do eixo x; (b) sentido negativo do eixo x
14
2.8
Rotores de motores-mancais: (a) Rotor gaiola de esquilo; (b) Rotor 4-polos
15
2.9
Curvas torque x velocidade motor-mancal 3.7 HP, 4-polos, 1715 RPM, com
rotor gaiola de esquilo e rotor com estrutura 4-polos
16
2.10 Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor 4-polos, i4-polos
induzidas
17
2.11 Sentido das correntes: (a) Estator – campo i2-polos; (b) Rotor 4-polos, i2-polos
induzidas
17
2.12 Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo,
i4-polos induzidas
18
2.13 Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo,
i2-polos induzidas
18
2.14 Força de Maxwell para motor com rotor gaiola e rotor 4-polos, delta i = 80%
19
3.1
Esquema de distribuição das bobinas do estator
21
3.2
Diagrama de blocos do motor-mancal de indução tipo enrolamento dividido
24
3.3
Representação esquemática do fluxo magnético por um par de bobinas no
estator de uma máquina de quatro polos
25
3.4
Corte transversal do motor-mancal com rotor descentralizado
28
3.5
Detalhe do ângulo no deslocamento do rotor
29
3.6
Esquema de bobinas do estator
29
x
3.7
Diagrama de blocos geral do motor-mancal
34
3.8
Diagrama de blocos do modelo da posição
35
3.9
Distribuição do enrolamento do motor-mancal de indução enrolamento
dividido
36
3.10 Simulação do motor pelo FEM, ia1 = 5,74 e ia2 = 0.29 A: (a) Comportamento
do fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor
36
3.11 Simulação do motor pelo FEM, ia1 = 2,87 e ia2 = 2,87 A: (a) Comportamento
do fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor
37
3.12 Simulação do motor pelo FEM, ia1 = 0,29 e ia2 = 5,74 A: (a) Comportamento do
fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor
37
3.13 Forças radiais, no rotor, devido à variação de corrente nas bobinas a1 e a2
38
40
4.1
Tipos de motores de indução
4.2
Ligação em estrela: (a) motor de indução trifásico; (b) motor-mancal de
indução trifásico
44
4.3
Motor-mancal monofásico
45
4.4
Força radial no motor monofásico, f = 60 Hz
45
4.5
Esquema de um motor monofásico
48
4.6
Esquema de ligação dos grupos do motor monofásico para geração de forças
radiais e torque: (a) operação um grupo; (b) operação com dois grupos
49
4.7
Diagrama de ligações dos grupos do motor monofásico
49
4.8
Distribuição dos grupos: (a) polos ativos; (b) polos ativos e conseqüentes
51
4.9
Geração de forças radiais: (a) polos-consequentes; (b) polos ativos por fase; (c)
polos ativos de fase
51
4.10 Diagrama de ligações dos motores trifásicos 6 terminais: (a) 220 V; (b) 380 V
53
4.11 Diagrama de ligações dos motores trifásicos 9 terminais: (a) 220 V; (b) 440 V
53
4.12 Diagrama de ligações dos motores trifásicos 9 terminais: (a) 380 V; (b) 760 V
54
4.13 Diagrama de ligações dos motores trifásicos 12 terminais: (a) 220 V; (b) 380 V
54
4.14 Diagrama de ligações dos motores trifásicos 12 terminais: (a) 440 V; (b) 760 V
55
4.15 Diagramas de ligação dos motores de indução trifásicos Dahlander
56
5.1
Diagrama de blocos do sistema motor-mancal de indução
60
5.2
Sistema mecatrônico motor-mancal de indução
61
5.3
Motor-mancal de indução
62
5.4
Motor-mancal de indução trifásico: (a) distribuição do enrolamento no estator;
(b) divisão do enrolamento para alimentação pelos inversores
63
Estrutura simplificada: (a) motor de indução; (b) motor-mancal radial; (c)
motor-mancal radial em operação
64
5.5
xi
5.6
Excentricidades do eixo do motor-mancal
66
5.7
Inversores trifásicos (IGBT’s)
66
5.8
Diagramas dos inversores de potência do motor-mancal
67
5.9
Interface DSP/IGBT’s
67
5.10 Sinais PWM monitorados em uma das saídas da interface de transmissão
68
5.11 Diagrama do retificador de potência
68
5.12 Curva de resposta do sensor LTS – 6-NP
69
5.13 Placa com as interfaces de corrente
70
5.14 Correntes ia1, e ia2: (a) f = 20 Hz; (b) f = 60 Hz
70
5.15 Medida de posição x e y, rotor mais próximo do estator
71
5.16 Medida de posição x e y, rotor mais distante do estator
71
5.17 Curva de resposta do sensor de posição para o ferro e para o metal usado no
disco de medição
72
5.18 Interface de posição
73
5.19 Visão geral do módulo eZdsp™F2812
®
73
5.20 Interface de visualização e programação
74
5.21 Diagrama geral do sistema de controle do motor-mancal
74
5.22 Lugar das raízes: (a) sistema em malha aberta; (b) sistema em malha fechada
77
5.23 Transformação do sinal de posição: (a) Transformação rotacional; (b)
Transformação bifásico – trifásica
78
5.24 Resposta dos controladores de corrente
81
5.25 Corrente Ia1, Ia2, Ic1 e Ic2: (a) controladores na região estável; (b) controladores
na região instável
82
6.1
Corrente de referência e corrente da bobina a1 para o motor operando com
frequência 60 Hz
85
6.2
Operação do motor, f = 30 Hz: (a) Posição do rotor; (b) Corrente ia1 e ia2
86
6.3
Limite de deslocamento radial do rotor
87
6.4
Correntes ia1, ia2, ic1 e ic2 – operação do motor-mancal sem limitação do sinal de
posição
88
Operação do motor-mancal, f = 60 Hz: (a) Região de dispersão; (b) Posição
eixos x e y
90
6.6
Operação do motor-mancal, f = 60 Hz, correntes ia1, ia2, ic1 e ic2
90
6.7
Operação do motor de indução, f = 60 Hz: (a) Região de dispersão; (b) Posição
eixos x e y
91
Operação do motor de indução, f = 60 Hz, correntes ia1, ia2, ic1 e ic2
92
6.5
6.8
xii
6.9
Operação do motor-mancal, f = 75 Hz: (a) Região de dispersão; (b) Posição
eixos x e y
93
6.10 Operação do motor-mancal, f = 75 Hz, correntes ia1, ia2, ic1 e ic2
93
6.11 Operação do motor-mancal, f = 30 Hz: (a) Região de dispersão; (b) Posição
eixos x e y
94
6.12 Operação do motor-mancal, f = 30 Hz, ia1, ia2, ic1 e ic2
94
6.13 Operação do motor-mancal, f = 20 Hz: (a) Região de dispersão; (b) Posição
eixos x e y
95
6.14 Operação do motor-mancal, f = 20 Hz, ia1, ia2, ic1 e ic2
96
Tabela
Página
3.1
Entreferro para bobinas
29
3.2
Dimensões do motor
35
4.1
Número de terminais x terminais de alimentação do motor
52
4.2
Motores de indução úteis para aplicação motor-mancal
59
5.1
Parâmetros e características do motor
62
6.1
Parâmetros do controlador PI
86
6.2
Parâmetros do controlador PD
89
6.3
Mediana e Desvio Padrão, f = 60 Hz
91
6.4
Mediana e Desvio Padrão, f = 75 Hz
93
6.5
Mediana e Desvio Padrão, f = 30 Hz
95
6.6
Mediana e Desvio Padrão, f = 20 Hz
96
xiii
Lista de Símbolos
Símbolo
Pnominal
ωnominal
Vnominal
Inominal
RS e RR
L
LdS e LdR
Lm
LS e LR
Descrição
Potência Nominal
Velocidade Nominal
Tensão nominal
Corrente Nominal
Resistências de estator e de rotor por fase
Indutância de uma bobina
Indutâncias de dispersão do estator e do rotor por fase
Indutância de magnetização
Indutâncias próprias do estator e do rotor por fase
Ra
Resistência da bobina do grupo auxiliar
Rp
Resistência da bobina do grupo principal
XLa
Reatância indutiva do grupo auxiliar
Xc
Reatância capacitiva do grupo auxiliar
XLp
Reatância indutiva do grupo principal
α
Ângulo de deslocamento do rotor em relação ao eixo x
η
Ângulo do eixo magnético da bobina em relação ao eixo x
t
Tempo
f
Frequência da corrente elétrica
ω
Frequência angular da corrente elétrica
TR
Constante de tempo do rotor
np
Número de pares de polos
J
Momento de inércia do rotor
σ
Fator de dispersão
km
Constante de torque relacionada à indutância própria do estator
D
Fator de carga
µ0
Permeabilidade magnética
N
Número de espiras da bobina
Ag
Área do pólo magnético
g0
l
Medida do entreferro
Comprimento
r
Raio
j
Operador complexo
h
Deslocamento
xiv
HM
Intensidade de campo magnético
B
Densidade de fluxo magnético
Bg
Densidade de fluxo magnético no entreferro
ψ4
Fluxo magnético 4-polos
ψ2
Fluxo magnético 2-polos
Força externa
Fext
FMM
Força magnetomotriz
FM
Amplitude de força magnetomotriz
FL
Força de Lorentz
FMx
Força de Maxwell
ℑm
Parte imaginária
W
Energia magnética
k
Constante que depende do número de espiras, da permeabilidade do
meio e da área magnética eficaz
k1
Constante dependente do deslocamento radial do rotor
m
Massa
ρ
Posição angular do fluxo do rotor
ε
Posição angular instantânea do eixo do rotor
δ
γ
Posição angular instantânea do vetor de corrente de estator
iS
Vetor de corrente de estator
iR
Vetor de corrente de rotor
Deslocamento angular de 120º
iS 1 e iS 2
*
iS 1 e iS 2
Vetores de corrente das bobinas do estator
*
ia1 , ia 2 , ib1 , ib 2 , ic1 , ic 2
i1* , i2* , i3* , i4* , i5* e i6*
iR1 e i R 2
*
iR1 e i R 2
Conjugados dos vetores de corrente do estator
Vetores de corrente das bobinas das fases a, b, e c
Correntes individuais de referência para cada bobina do estator
Vetores de corrente das bobinas do rotor
*
iS1 , iS 2 e iS 3
Conjugados dos vetores de corrente do rotor
Valores instantâneos das correntes trifásicas do estator
iSa e iSb
Valores instantâneos das correntes bifásicas em coordenadas do
estator
iSd e iSq
Valores instantâneos das correntes de campo e torque em
coordenadas de campo do rotor
xv
imR
i a, i b e i c
iR
*
Valor instantâneo da corrente de magnetização
Correntes trifásicas de referência por fase
Conjugado do vetor de corrente do rotor
iRa , iRb , iRc
Vetores de correntes das bobinas das fases a, b, e c do rotor
imR1 e imR 2
Vetores de corrente de magnetização do rotor
i2-polos
Corrente 2-polos
i4-polos
Corrente 4-polos
IM
Amplitude máxima da corrente elétrica
ip
Corrente elétrica do grupo principal
ia
Corrente elétrica do grupo auxiliar
∆ix e ∆iy
Correntes para controle de posição
u a, u b e u c
Sinais de corrente de posicionamento após a transformação
rotacional e bifásico-trifásica
ux e uy
Sinais de corrente de posicionamento após a transformação
rotacional
uα e uβ
Sinal de corrente de posicionamento à saída do controlador de
posição
mM e mL
ω mec e ωmR
d
dt
∂/∂t
∫
sen x e cos x
Valores instantâneos do torque eletromagnético e do torque de carga
Valores instantâneos da velocidade mecânica e da velocidade de
escorregamento
Operador de derivação de uma função ou variável
Derivada parcial de uma grandeza
Operador de integração de uma função ou variável
Funções seno e cosseno de um ângulo x genérico
(x)
Função exponencial de uma variável x genérica
Y
Valores instantâneos das saídas reais
erro
Erro instantâneo entre duas variáveis
R(k)
Sinal de referência de uma variável genérica
P(k)
Ação de controle proporcional no instante k
I(k)
Ação de controle integrativa no instante k
D(k)
Ação de controle derivativa no instante k
e
KP
Valor do ganho proporcional
KI
Valor do ganho integrativo
KD
Valor do ganho derivativo
xvi
refx
Posição de referência na direção X
refy
Posição de referência na direção Y
X(k)
Posição do rotor na direção X
Y(k)
Posição do rotor na direção Y
posX, posY
Sinais dos sensores de posição X e Y
erroX e erroY
Sinais de erro de posição eixos X e Y
veloX e veloY
Sinais de variação do erro dos sinais de posição eixo X e Y
u(k)
Ação de controle genérica
+, -, * e /
Operadores de soma, subtração, multiplicação e divisão
Va, Vb e Vc
Tensão de alimentação alternada das fases a, b e c
Vcc
Tensão de alimentação contínua
VDSP
Valor digital de uma grandeza no DSP
>>
Deslocamento de bits à direita
<<
Deslocamento de bits à esquerda
Bloco de integração numérica de variáveis
cos
sen
Bloco de cálculo de senos e cossenos
Bloco de implementação do controlador PI
n
Constante multiplicativa de valor n
Vetores de entrada e saída, conexões entre blocos
Ponto de conexão
Ponto de soma de variáveis
Ponto de divisão de variáveis
Ponto de multiplicação de variáveis
Sensor de posição ou corrente
Inversores PWM
Retificador
Bobina do motor elétrico
xvii
Resumo da tese apresentada ao PPgEE/UFRN como parte dos requisitos necessários para a
obtenção do grau de Doutor em Engenharia Elétrica (D. Sc.)
Viabilidade da Utilização de Máquinas de Indução Convencionais como
Motores sem Mancais Mecânicos
Valcí Ferreira Victor
Novembro de 2012.
Motores elétricos transformam energia elétrica em energia mecânica com relativa
facilidade. Em algumas aplicações particulares, necessita-se de motores elétricos para
trabalhar com fluídos sem contaminação, em regime de altas velocidades, em condições
inóspitas, ou, ainda, em locais de difícil acesso e à profundidade bastante considerável. Nestes
casos, os motores com mancais mecânicos, cujo desgaste ocasiona a necessidade de
manutenções, não são adequados. Uma solução possível para este problema advém de duas
alternativas: motores com mancais magnéticos, que têm o inconveniente de aumentar o
comprimento da máquina, e motores-mancais, que agregam compacidade. Motores de
indução têm sido cada vez mais utilizados em pesquisas, pois conferem maior robustez aos
motores-mancais comparados a esses tipos de máquinas construídas com outros motores. As
pesquisas já realizadas com motores-mancais de indução utilizaram protótipos, cujas
estruturas do estator e/ou rotor foram modificadas, diferindo em grande parte dos motores de
indução convencionais. É objetivo deste trabalho, estudar a viabilidade do uso dos motores de
indução convencionais para a aplicação de motores-mancais, apontando os tipos de motores
dessa categoria que mais se adéquam. O estudo utiliza o Método dos Elementos Finitos –
FEM. Como comprovação, um motor de indução convencional com rotor gaiola de esquilo foi
utilizado com sucesso para a aplicação de motor-mancal do tipo enrolamento dividido,
ratificando a tese proposta. O sistema de controle foi implementado em um Processador
Digital de Sinais – DSP.
Palavras-chave: DSP; Elementos Finitos; Enrolamento Dividido; Motor de Indução
Convencional; Motor-mancal; Rotor Gaiola de Esquilo.
xviii
Abstract of thesis presented to PPgEE/UFRN as partial fulfillment of the necessary
requirements for degree of Doctor of Eletric Engineering (D. Sc.)
Viability of the Using Machines Induction Motors without bearings as
Conventional Mechanical
Valcí Ferreira Victor
November, 2012.
Electrical Motors transform electrical energy into mechanic energy in a relatively easy
way. In some specific applications, there is a need for electrical motors to function with noncontaminated fluids, in high speed systems, under inhospitable conditions, or yet, in local of
difficult access and considerable depth. In these cases, the motors with mechanical bearings
are not adequate as their wear give rise to maintenance. A possible solution for these
problems stems from two different alternatives: motors with magnetic bearings, that increase
the length of the machine (not convenient), and the bearingless motors that aggregate
compactness. Induction motors have been used more and more in research, as they confer
more robustness to bearingless motors compared to other types of machines building with
others motors. The research that has already been carried out with bearingless induction
motors utilized prototypes that had their structures of stator/rotor modified, that differ most of
the times from the conventional induction motors. The goal of this work is to study the
viability of the use of conventional induction Motors for the beringless motors applications,
pointing out the types of Motors of this category that can be more useful. The study uses the
Finite Elements Method (FEM). As a means of validation, a conventional induction motor
with squirrel-cage rotor was successfully used for the beringless motor application of the
divided winding type, confirming the proposed thesis. The controlling system was
implemented in a Digital Signal Processor (DSP).
Keywords: DSP; Finite Element; Winding Divided; Conventional Induction Motor,
Bearingless motor; Squirrel Cage Rotor.
xix
1
___________________________________________________________________________
Capítulo 1 – Motores sem Mancais Mecânicos
1.1. Introdução
Motores elétricos são máquinas que transformam energia elétrica em mecânica com
relativa facilidade. Devido a essa característica esse tipo de máquina é amplamente utilizado
para as mais diversas aplicações.
O motor de corrente contínua foi o primeiro tipo desenvolvido, permanecendo, durante
muito tempo, sendo utilizado, principalmente na indústria, devido a sua simplicidade para
controle de velocidade necessário a um grande número de aplicações. O desacoplamento entre
o controle de torque e o controle de fluxo permitia um controle independente de velocidade e
de torque, produzindo, dessa forma, um bom desempenho em regime ou em transitório.
A grande desvantagem do motor de corrente contínua está associada à construção do
motor em si, cujo constante desgaste das escovas e comutadores, necessários ao
funcionamento, eleva os custos de manutenção e fabricação dos mesmos.
O motor de indução com rotor gaiola de esquilo apresenta inúmeras vantagens em
relação ao de corrente contínua, seu precursor. Construção relativamente simples, baixo custo
de fabricação, robustez mecânica, inexistência de elementos que produzam faíscas, baixíssimo
custo de manutenção, possibilidade de aplicação em ambientes perigosos, são algumas das
vantagens desse tipo de motor. Durante muito tempo, sua principal desvantagem foi a
dificuldade envolvida no controle, que limitou o uso desse motor para aplicações cujo
controle de velocidade e torque era necessário.
O desenvolvimento de técnicas de controle mais eficientes e também o avanço
conseguido com os acionamentos por meio da eletrônica de potência ampliaram o uso do
motor de indução para aplicações onde os motores de corrente contínua eram bastante
empregados, dada à necessidade de controle de velocidade mais acurado.
Devido às características mencionadas, o motor de indução com rotor em gaiola de
esquilo passou a ser utilizado em um número cada vez maior de aplicações, sendo atualmente
o tipo de motor elétrico mais utilizado.
Contudo, mesmo o motor de indução convencional, rotor gaiola de esquilo, apresenta
dificuldades para algumas aplicações bem específicas, residentes nos mancais mecânicos que
são os elementos mais suscetíveis de manutenção.
___________________________________________________________________________
2
___________________________________________________________________________
A eliminação/substituição dos mancais mecânicos é um fator que produziria melhor
custo-benefício e maior eficiência. Por exemplo, em máquinas sem mancais mecânicos, a
função de sustentação do eixo é realizada magneticamente.
1.2. Motores sem Mancais Mecânicos
Dentre as justificativas para a construção de motores sem mancais mecânicos podemse citar:
• Necessidade de redução dos custos de manutenção ocasionados pelos desgastes
dos mancais mecânicos;
• Dificuldade e alto custo para realização de serviços de manutenção e/ou
substituição dos mancais em algumas aplicações específicas (bombas submersas);
• Condições inóspitas (alta temperatura, fluido radioativo, etc.);
• Necessidade de circulação de fluídos isentos de contaminação;
• Operação a altíssimas velocidades;
• Aumento da robustez.
As soluções conhecidas para a substituição dos mancais convencionais são os motores
com mancais magnéticos e os motores-mancais.
Os motores-mancais, ou máquinas sem mancais como denominado em alguns
trabalhos, é segundo as definições clássicas: “motor com a função de mancal integrada
magneticamente” ou “mancal magnético com a função de motor integrada magneticamente”
(Chiba, 2005). Conforme estas definições um motor-mancal se diferencia de um motor
convencional por ter a função mancal magneticamente integrada.
Historicamente, observa-se que surgiu a primeira ideia para substituição dos mancais
mecânicos na década de 1970: os mancais magnéticos.
Os mancais magnéticos se constituíam em eletroímãs que substituíam os mancais
mecânicos durante o funcionamento do motor fazendo com que o rotor levitasse (Hermann,
1973), (Hermann, 1974). A Figura 1.1 apresenta o diagrama esquemático do mancal
magnético.
A operação do mancal para centralização do rotor é realizada pela atuação de forças
eletromagnéticas produzidas nos pares de bobinas situados na direção x (esquerda e direita) e
y (abaixo e acima).
___________________________________________________________________________
3
___________________________________________________________________________
Figura 1.1 – Diagrama esquemático do mancal magnético.
A força de atração magnética produzida por cada bobina é ajustada através de um
controlador de corrente que atua em modo diferencial para as duas bobinas diametralmente
opostas. Na direção y, por exemplo, um aumento do comprimento do entreferro na parte
superior é acompanhado de proporcional diminuição na parte inferior. Neste caso, para que o
rotor volte à posição inicial, a corrente elétrica na bobina superior é aumentada na mesma
proporção que se diminui a corrente na bobina inferior, de modo que a força magnética radial
aumente na direção do maior entreferro, conduzindo o rotor à centralização.
Os mancais magnéticos dispensam o uso de mancais mecânicos para sustentação do
eixo da máquina. Mas, por outro lado, se faz necessário o aumento do comprimento da
máquina para que seja possível alojar os mancais magnéticos, tornando-se as máquinas
maiores que as convencionais para mesma potência. A Figura 1.2 apresenta a estrutura básica
de uma máquina com mancais magnéticos.
Figura 1.2 – Máquina com mancais magnéticos.
___________________________________________________________________________
4
___________________________________________________________________________
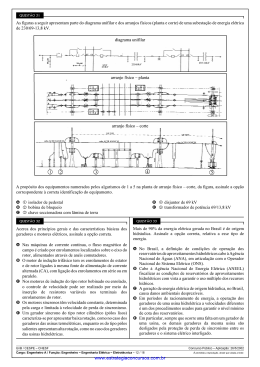
A proposta de uma máquina sem mancais mecânicos (Boch, 1988), cuja força de
posicionamento radial era ajustada a partir da corrente elétrica de excitação do motor,
dispensava o uso de mancais magnéticos e dos adicionais espaços necessários para alojamento
dos mesmos. Em contrapartida, surge um aumento na complexidade relacionada ao controle
da máquina. A Figura 1.3 apresenta a estrutura básica de um motor-mancal.
Figura 1.3 – Motor-mancal.
Os motores-mancais, em comparação às máquinas com mancais magnéticos,
apresentam como principal vantagem a compacidade da máquina para produção de torque e
de forças de sustentação do rotor, função mancal. Por outro lado, a potência da máquina deve
ser dividida para a realização desta dupla função.
Os
motores-mancais
foram
desenvolvidos
utilizando-se
diversos
tipos
de
motores/estruturas: motor síncrono de relutância (Chiba, 1990), máquina de indução sem
mancal (Chiba, 1991), motor sem mancal utilizando imã permanente (Chiba, 1994), motor de
relutância comutada (Preston, 1994), motor sem mancal tipo homopolar (Ichikawa, 1999) e
algumas estruturas especiais, tais como, rotor tipo disco (Ueno, 2000), rotor externo
(Masuazawa, 2000) e rotor tipo anel (Schob, 1998).
Os estatores dos motores-mancais apresentam duas configurações básicas: 1) dois
enrolamentos, sendo um para a produção de forças radiais e o outro para a produção de
torque; 2) um único enrolamento para a produção tanto de forças radiais quanto de torque. Os
rotores podem ser encontrados basicamente em três tipos: 1) gaiola de esquilo convencional;
2) gaiola modificada, estrutura 4-polos; 3) ímã permanente.
A denominação da máquina geralmente é tomada do tipo de motor utilizado como
base para construção e de características como configuração do estator e/ou rotor. Por
exemplo, a denominação “motor-mancal de indução do tipo duplo enrolamento” advém do
___________________________________________________________________________
5
___________________________________________________________________________
motor de indução com estator de duplo enrolamento (motor de dupla velocidade realizada por
comutação de enrolamento).
O desenvolvimento das máquinas com mancais magnéticos, bem como dos motoresmancais, foi acompanhado do prévio desenvolvimento das estratégias de controle de campos
magnéticos; integração dos inversores e controladores digitais para alimentação do
enrolamento motor e do enrolamento de controle de posicionamento; aplicação da técnica de
controle vetorial, entre outros.
1.3. Motores-Mancais de Indução
Os motores de indução, devido às características já mencionadas, têm sido cada vez
mais utilizados para a construção de motores-mancais. Nos motores-mancais de indução a
função motor e a função mancal são realizadas pelo(s) enrolamento(s) estatórico(s).
Ao longo dos anos, dois tipos de motores-mancais de indução foram propostos: os
motores-mancais de indução do tipo duplo enrolamento (Chiba, 1990) e os motores-mancais
do tipo enrolamento dividido (Salazar, 1993).
O primeiro utiliza enrolamentos distintos dispostos no estator, nos quais são realizadas
as funções de produção de torque e de força de posicionamento radial do rotor. O segundo
tipo utiliza o mesmo enrolamento estatórico para ambas as funções. As pesquisas realizadas
neste trabalho terão como base o motor-mancal de indução do tipo enrolamento dividido.
As pesquisas com motores-mancais de indução do tipo duplo enrolamento se
desenvolvem em grande parte no Japão. No Brasil, as pesquisas com motores-mancais de
indução do tipo enrolamento dividido são realizadas na Universidade Federal do Rio de
Janeiro (UFRJ), Universidade Federal Fluminense (UFF) e na Universidade Federal do Rio
Grande do Norte (UFRN).
No final da década de 1980, na UFRJ, foi proposto o uso do próprio enrolamento do
estator para função de mancais magnéticos em motores de corrente alternada (Salazar, 1990).
Em 1999, foi realizado o estudo do efeito de aplicação de carga torsional sobre o
posicionamento radial de um motor mancal (Santisteban, 1999).
Em 2000, foi proposta a levitação do rotor por motor-mancal radial e mancal
magnético por supercondutor (David, 2000). Em 2003, o controle simultâneo de velocidade e
posição em mancais motores magnéticos (Cardozo, 2003). Em 2007, a implementação do
controle de um motor-mancal utilizando DSP (Gomes, 2007). Em 2010, uma contribuição à
___________________________________________________________________________
6
___________________________________________________________________________
modelagem e controle do motor de indução suportado magneticamente é apresentada na UFF
(Rodriguez, 2010).
Na UFRN, no início da década de 2000, foi proposta a máquina sem mancal trifásica
de bobinado dividido para operação na vertical (Ferreira, 2002). Dois anos após, foram
realizadas otimizações do sistema de posicionamento radial do eixo do motor com o mesmo
funcionando na horizontal (Castro, 2004), sendo o controle realizado através do DSP. A
máquina utilizada teve o rotor adaptado para minimizar a influência das correntes
responsáveis pela produção de torque eletromagnético sobre o controle de posicionamento
radial. Um modelo de quatro polos foi confeccionado com circuitos independentes (Chiba,
1998).
Em 2006, foi realizada a modelagem matemática do motor-mancal trifásico baseada
no modelo vetorial da máquina de indução trifásica convencional (Ferreira, 2006), (Leonhard,
2001).
Em 2007, foi implementado um sistema de controle vetorial de velocidade rotacional
com o motor-mancal trifásico com bobinado dividido, utilizando duas redes neurais tipo
feedfoward multicamadas para estimação da magnitude da corrente de magnetização e
velocidade do fluxo do rotor (Paiva, 2007). Todo o sistema identicamente ao anterior foi
controlado digitalmente por um DSP.
Em 2011, foram implementadas novas interfaces eletrônicas, proporcionando mais
imunidade a ruídos e melhor qualidade dos sinais que são processados pelo sistema de
controle no DSP (Sousa Filho, 2011).
O presente trabalho avalia o uso de motores de indução convencionais para aplicação
de motores sem mancais mecânicos.
1.4. Justificativas e Objetivos
Avaliando-se as primeiras propostas para construção de máquinas sem mancais
mecânicos e o desenvolvimento dos motores-mancais, nota-se, por algumas razões expostas,
uma tendência de compactação da máquina. Os motores-mancais se aproximam mais de um
motor convencional que os motores com mancais magnéticos.
O motor-mancal de indução do tipo enrolamento dividido em relação ao do tipo duplo
enrolamento é mais semelhante a um motor de indução convencional. No entanto, várias
modificações têm sido realizadas/propostas na estrutura do motor do tipo enrolamento
dividido que o torna de mais difícil construção, mais alto custo e menos prático.
___________________________________________________________________________
7
___________________________________________________________________________
As pesquisas realizadas com o motor de indução do tipo enrolamento dividido têm
sempre se utilizado de protótipos que apresentam modificações no rotor ou estator. O motor
de indução convencional agrega aos motores-mancais robustez, praticidade e menor custo.
Este trabalho tem como objetivo estudar a viabilidade da utilização de máquinas de
indução convencionais para a construção de motores sem mancais mecânicos apresentando os
tipos de motores de indução mais aplicáveis. Para isto, os motores de indução convencionais
serão avaliados segundo as características próprias à construção de motores-mancais.
Validando o estudo, o motor-mancal de indução será implementado, utilizando-se um motor
de indução convencional trifásico, 3,7 KW, 4-polos, 1715 RPM, rotor gaiola de esquilo.
1.5. Sumário
Uma breve descrição dos conteúdos de cada um dos Capítulos deste trabalho é
apresentada a seguir:
O Capítulo 2 apresenta os dois tipos de motores-mancais de indução, mostrando mais
detalhadamente o modo como as forças radiais de restauração da posição do rotor são
produzidas.
No Capítulo 3, é apresentada a modelagem do motor-mancal de indução trifásico do
tipo enrolamento dividido.
O Capítulo 4 apresenta as diversas características dos motores-mancais radiais de
indução.
A implementação do sistema mecatrônico motor-mancal de indução é apresentada no
Capítulo 5.
O Capítulo 6 traz os resultados experimentais da implementação do motor-mancal de
indução do tipo enrolamento dividido.
O Capítulo 7 apresenta as conclusões finais e as sugestões de trabalhos futuros.
___________________________________________________________________________
8
___________________________________________________________________________
Capítulo 2 – Forças Radiais nos Motores-Mancais de Indução
2.1. Introdução
As estruturas de sustentação do eixo dos motores-mancais são construídas de acordo
com o número de graus de liberdade do rotor que são passíveis de serem controlados. Para a
levitação do eixo é necessário o controle de cinco graus de liberdade. Excluindo-se o
movimento giratório do rotor, deve existir um controle axial (eixo z), e quatro radiais (eixo x e
y), Figura 2.1.
Figura 2.1 – Graus de liberdade do rotor.
A Figura 2.2 apresenta dois tipos de estruturas utilizadas para a construção de
motores-mancais, outros tipos podem ser vistos na literatura (Chiba, 2005). Esses dois tipos
de estruturas foram utilizadas nos trabalhos de (Ferreira, 2002) – mancal radial magnético e
mancal axial-radial mecânico e de (David, 2000) – mancais radiais magnéticos e mancal axial
por supercondutor.
Figura 2.2 – Estrutura para suspensão magnética: (a) com dois graus de liberdade; (b) com cinco
graus de liberdade.
___________________________________________________________________________
9
___________________________________________________________________________
Os motores-mancais radiais de indução são máquinas elétricas giratórias, cujas
estruturas possibilitam o controle do movimento do rotor com graus de liberdades unicamente
radiais (o rotor é fixo axialmente). A centralização do rotor é conseguida utilizando-se um
controle ativo das forças eletromagnéticas de restauração da posição radial (eixo-x e y). As
estratégias para geração dessas forças para os dois tipos de motores-mancais de indução são
apresentadas a seguir.
2.2. Geração de Forças em Motores de Indução
Em um motor elétrico, é possível identificar dois tipos de forças de atuação
eletromagnética: força de Lorentz e força de Maxwell. A primeira age na direção tangencial,
sendo própria para a produção do torque eletromagnético necessário ao movimento de rotação
do rotor. A segunda age na direção normal, sendo utilizada nos motores-mancais radiais para
centralização do rotor no estator.
Nos motores de indução convencionais, se busca maximizar a produção das forças de
Lorentz e nos motores-mancais de indução, um equilíbrio entre essas duas forças, de maneira
que seja possível a produção de torque e de forças de restauração da posição do rotor.
As forças de Lorentz e Maxwell, apresentadas na Figura 2.3, são dadas em módulo
respectivamente por:
FL = i (l. B )
FMx =
Bg2
2 µ0
(2.1)
Ag
(2.2)
onde:
FL é a força de Lorentz;
FMx é a força de Maxwell;
i é a corrente que circula no condutor;
B é a densidade de fluxo;
Bg é a densidade de fluxo no entreferro;
l é o comprimento ativo do condutor;
Ag é a área eficaz atravessada pelo fluxo;
µ0 é a permeabilidade magnética do meio.
___________________________________________________________________________
10
___________________________________________________________________________
Figura 2.3 – Forças de Maxwell e de Lorentz em um motor-mancal.
A direção e o sentido da força de Lorentz dependem do vetor densidade de fluxo
magnético e do sentido da corrente no condutor. A força de Maxwell é sempre uma força de
atração que tende a diminuir o entreferro.
A força de Maxwell, dada por (2.2), pode também ser escrita em função da indutância
e da corrente da bobina, como em (2.3). Esta forma é bastante utilizada para o controle de
posição do rotor por trabalhar com grandezas terminais (corrente).
FMx =
1 ∂L 2
i
2 ∂h
(2.3)
onde:
L é a indutância da bobina;
h é o deslocamento.
O termo quadrático da corrente em (2.3), assim como no caso da densidade de fluxo
em (2.2), conduz a forças de Maxwell sempre positivas, tornando-as uma força de atração não
importando o sentido da corrente aplicada na bobina. A Figura 2.4 apresenta as forças
magnéticas atuando sobre o rotor para o caso de um par de bobinas instaladas no estator de
uma máquina de indução; a frequência das correntes aplicadas às bobinas é igual a 60 Hz.
Na Figura 2.4, o período da onda de força de Maxwell é igual a 8,33 ms, metade do
período da corrente aplicada às bobinas. A frequência da força de Maxwell, conforme prevista
por (2.3) e observada na Figura 2.4, é igual ao dobro da frequência da corrente.
___________________________________________________________________________
11
___________________________________________________________________________
600
500
Força (N)
400
300
200
100
0
0
5
10
15
20
25
30
35
t (ms)
Figura 2.4 – Forças de Maxwell para corrente com frequência 60 Hz.
As forças de Maxwell em máquinas rotativas são geradas pela variação do fluxo
magnético no entreferro. A geração das forças de Maxwell pode ser compreendida
observando-se a Figura 2.5 e o desenvolvimento que se segue.
Por questões de simplificação, somente uma linha de fluxo é apresentada mostrando o
caminho preferencial através do estator – entreferro – rotor.
(a2)
i a2
(a1)
i a1
Figura 2.5 – Representação esquemática do fluxo magnético para um par de bobinas no estator,
máquina de quatro polos.
Considerando-se o rotor centralizado, alimentando-se a bobina (a1) com corrente ia1,
tem-se a distribuição de fluxo apresentada pela linha contínua. Esta distribuição produz uma
r
concentração de fluxo na região do entreferro à direita, ocasionando uma força Fa 1 que tende
___________________________________________________________________________
12
___________________________________________________________________________
a mover o rotor para a direita. Alimentando-se ambas as bobinas com as correntes ia1 e ia2 de
mesma amplitude, a força resultante, agindo sobre o rotor, será igual a zero para o rotor
centralizado no estator. Pequenos deslocamentos para a direita tornam a amplitude da força
r
r
Fa 1 maior que Fa 2 , produzindo uma força resultante que tende a mover o rotor nesta direção.
Analogamente para o rotor centralizado, alimentando-se a bobina (a2) com uma
r
corrente ia2, tem-se a distribuição de fluxo apresentada pela linha tracejada. A força Fa 2
produzida tende a mover o rotor para a esquerda. Deslocamentos para a esquerda produzem
uma força resultante que tende a mover o rotor para esta direção.
Dado que, aleatoriamente ou por ação de uma força externa, o deslocamento radial do
rotor ocorra na direção do eixo das bobinas no sentido positivo de x, a força resultante tenderá
a crescer devido à diminuição do entreferro fazendo com que o rotor seja encostado no
estator.
A variação de posição do rotor em uma determinada direção será acompanhada do
aumento da força conduzindo à diminuição do entreferro. Daí se conclui que somente um
controle de forças ativo pode manter o rotor centralizado.
Como a composição de forças em um plano pode ser conseguida a partir de somente
duas direções, é possível produzir forças de restauração para a centralização do rotor
utilizando-se conjuntos de bobinas instalados em eixos ortogonais de forma que a posição
possa ser controlada a partir da variação das correntes nas bobinas como mostrado na Figura
2.5.
2.3. Motor-Mancal Radial de Indução Tipo Duplo Enrolamento
A Figura 2.6 apresenta de forma simplificada as distribuições de fluxo na seção
transversal de um motor-mancal de indução bifásico com os enrolamentos N4 e N2 com 4 e 2polos, respectivamente. Nela, se pode observar o princípio de geração de forças radiais de
posicionamento do rotor para motores-mancais do tipo duplo enrolamento.
Excitando-se o enrolamento N4 com corrente senoidal, produz-se uma distribuição
simétrica de fluxo ψ4 mostrada pelas linhas contínuas. Excitando-se o grupo N2a com
correntes entrando e saindo na configuração apresentada, o fluxo ψ2a produzido aumenta a
densidade de fluxo na região do entreferro à direita e reduz na região do entreferro à esquerda
como apresentado na Figura 2.6(a) pelas linhas tracejadas. Desta forma, a distribuição
simétrica do fluxo 4-polos ψ4 é desbalanceada.
___________________________________________________________________________
13
___________________________________________________________________________
Figura 2.6 – Motor-mancal tipo duplo enrolamento – geração de força radial: (a) sentido positivo do
eixo x; (b) sentido negativo do eixo x.
O desbalanceamento do campo magnético resulta em força radial aplicada ao rotor no
sentido positivo de x; pela inversão do sentido da corrente no grupo N2a a densidade de fluxo
será aumentada na região do entreferro à esquerda e reduzida à direita e a força radial aplicada
será no sentido negativo de x, como mostrada na Figura 2.6 (b).
Analogamente, a geração de força radial na direção y em ambos os sentidos pode ser
conseguida pela mudança no sentido da corrente aplicada ao grupo N2b. Assim, são geradas as
forças radiais para posicionamento do rotor a partir de qualquer posição.
Os enrolamentos N4 e N2 (composto por N2a e N2b) são denominados na literatura
como enrolamento motor (ou de acionamento) e enrolamento mancal (ou de suspensão). A
relação entre os números de polos dos dois enrolamentos do estator é descrita por np1 = np2 + 2
onde np1 e np2 são os números de pares de polos dos enrolamentos de torque (suspensão) e
suspensão (torque), respectivamente.
2.4. Motor-Mancal Radial de Indução tipo Enrolamento Dividido
A Figura 2.7 apresenta as distribuições de fluxo na seção transversal de um motormancal de indução bifásico com o enrolamento 4-polos N4. Nela, se pode observar o princípio
de geração de forças radiais de posicionamento do rotor para motores-mancais radiais de
indução do tipo enrolamento dividido. Por simplicidade, somente as bobinas de uma fase são
apresentadas.
___________________________________________________________________________
14
___________________________________________________________________________
Excitando-se o enrolamento N4 com corrente senoidal, é produzida a distribuição
simétrica de fluxo ψ4 mostrada pelas linhas contínuas. Aumentando-se a corrente de ∆I1 no
grupo à direita N4d e simultaneamente diminuindo-se a corrente de ∆I1 no grupo à esquerda
N4e, os fluxos ψ4d e ψ4e são produzidos, representados pelas linhas tracejadas na Figura 2.7(a).
A densidade de fluxo na região do entreferro à direita é aumentada, enquanto que na região do
entreferro à esquerda é diminuída. A distribuição simétrica do fluxo 4-polos ψ4 é
desbalanceada.
O desbalanceamento do campo magnético resulta em força radial aplicada ao rotor no
sentido positivo de x, Figura 2.7 (a).
Analogamente diminuindo-se a corrente de ∆I1 no grupo à direita N4d e
simultaneamente aumentando-se a corrente de ∆I1 no grupo à esquerda N4e, os fluxos ψ4d e
ψ4e são produzidos, representados pelas linhas tracejadas na Figura 2.7(b). A densidade de
fluxo na região do entreferro à esquerda é aumentada, enquanto que na região do entreferro à
direita é diminuída. A distribuição simétrica do fluxo 4-polos ψ4 é desbalanceada.
Na região superior e inferior do entreferro, os fluxos criados pelos desbalanceamentos
de corrente se opõem, não contribuindo para desbalancear o fluxo ψ4 na direção vertical.
O desbalanceamento do campo magnético nas regiões do entreferro à direita e à
esquerda resulta em força radial aplicada ao rotor no sentido negativo de x, Figura 2.7 (b).
∆Ι1
∆Ι1
∆Ι1
∆Ι1
Figura 2.7 – Motor-mancal do tipo enrolamento dividido – geração de força radial: (a) sentido
positivo do eixo x; (b) sentido negativo do eixo x.
___________________________________________________________________________
15
___________________________________________________________________________
A geração de forças radiais na direção y é realizada da mesma forma que para o eixo x
desbalanceando as correntes dos grupos de bobinas da segunda fase, cujo eixo está deslocado
de 90o. Os grupos de bobinas da segunda fase não estão representados na Figura 2.7.
Desse modo, são geradas as forças de restauração para posicionamento do rotor a
partir de qualquer posição.
O enrolamento N4 tem a dupla função de produção de torque eletromagnético e de
forças de restauração para posicionamento do rotor. A potência total da máquina fica dividida
para realização destas duas funções.
Observando-se as distribuições de fluxo no entreferro, nota-se que, em ambos os tipos
de máquinas, os desbalanceamentos no fluxo principal (produção de torque) nas regiões do
entreferro são idênticos, como era de se esperar para restauração da posição do rotor em uma
mesma direção e sentido. A diferença se encontra na forma como o desbalanceamento do
fluxo é produzido. Na máquina de duplo enrolamento, o desbalanceamento ocorre pela
produção de um segundo fluxo originado no enrolamento mancal; na máquina de enrolamento
dividido, o desbalanceamento do fluxo é produzido pelo desbalanceamento das correntes que
alimentam cada um dos grupos de bobinas da fase diametralmente distribuídos.
2.5. Motores-Mancais Radiais de Indução – Tipos de Rotores
Dois tipos de rotores têm sido utilizados para a construção de motores-mancais de
indução, rotor gaiola de esquilo e rotor com estrutura de pequenos circuitos 4-polos (Chiba,
1998). A Figura 2.8 apresenta de forma simplificada o circuito de ambos os rotores.
Figura 2.8 – Rotores de motores-mancais: (a) Rotor gaiola de esquilo; (b) Rotor 4-polos.
O rotor tipo gaiola de esquilo apresenta como grande vantagem a praticidade e
robustez. Por outro lado, devido ao seu projeto para maximização do torque os níveis de
forças radiais são inferiores aos obtidos com o rotor com circuitos 4-polos.
___________________________________________________________________________
16
___________________________________________________________________________
O rotor 4-polos necessita de usinagem para construção do motor-mancal. O torque
produzido por uma máquina com esse tipo de rotor é inferior ao conseguido com o rotor em
gaiola de esquilo convencional.
As curvas torque versus velocidade para o motor-mancal utilizado neste trabalho com
ambos os tipos de rotores são apresentadas na Figura 2.9. Nela, é possível notar um menor
torque para o motor com rotor 4-polos, principalmente na faixa de velocidade próxima à
velocidade nominal do motor, 1715 RPM.
Curvas Torque x Velocidade
25
Rotor Gaiola
Rotor Circuitos 4-pólos
Torque (n.m)
20
15
10
5
0
1710
1720
1730
1740
1750 1760 1770
Velocidade (RPM)
1780
1790
1800
Figura 2.9 – Curvas torque x velocidade motor-mancal 3,7 HP, 4-polos, 1715 RPM, com
rotor gaiola de esquilo e rotor com estrutura 4-polos.
Considerando-se um motor-mancal com estator 4-polos, com ambos os tipos de
rotores, a distribuição de fluxo magnético produzido pelo enrolamento do estator é
apresentada de forma simplificada nas Figuras 2.10 a 2.13. Para facilitar a compreensão, se
utiliza um rotor com somente quatro barras.
A Figura 2.10(a) mostra a seção transversal do motor-mancal com rotor estrutura 4polos, no qual é apresentada a configuração das correntes induzidas no rotor devido ao campo
4-polos do estator.
Segundo a lei de Lenz, a corrente induzida no rotor se opõe a causa que a produziu.
Para a circulação de correntes 4-polos no enrolamento do estator, as correntes induzidas no
rotor se apresentam entrando nas barras 1, 3 e saindo nas barras 2, 4. Na Figura 2.10(b), podese observar o sentido da corrente em cada trecho do anel e também das barras do rotor.
___________________________________________________________________________
17
___________________________________________________________________________
A Figura 2.11(a) mostra o sentido das correntes induzidas no rotor para a circulação de
correntes 2-polos no enrolamento do estator.
Observando-se, na Figura 2.11(b), o sentido da corrente em cada trecho do rotor,
(barras e anéis) nota-se que correntes 2-polos produziriam a circulação de correntes em
sentidos opostos para um mesmo trecho do circuito, o que de fato é uma impossibilidade.
Veja-se, por exemplo, a circulação de correntes nos anéis entre as barras 1 – 2, 2 – 3, 3 – 4, e
4 – 1. Conclui-se que este tipo de rotor com estrutura 4-polos, devido a sua geometria,
restringe a circulação de correntes induzidas 2-polos.
Figura 2.10 – Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor 4-polos, i4-polos induzidas.
Figura 2.11 – Sentido das correntes: (a) Estator – campo i2-polos; (b) Rotor 4-polos, i2-polos induzidas.
Nas Figuras 2.12(a) e 2.13(a), são apresentadas as distribuições de fluxo do estator
idênticas àquelas das Figuras 2.10(a) e 2.11(a). Porém, para o rotor gaiola de esquilo é
___________________________________________________________________________
18
___________________________________________________________________________
possível a circulação de corrente induzidas no rotor tanto de 4-polos como de 2-polos, Figura
2.12(a) e 2.12(b).
Neste caso, devido à produção de correntes induzidas 2-polos, existirá certo atraso na
atuação do controle de posicionamento (Castro, 2004). Segundo Chiba, se faz necessário a
compensação para atraso e erro de direção no posicionamento ocasionado pelo uso do rotor
em gaiola de esquilo em motores-mancais de indução (Chiba et al, 2007).
Figura 2.12 – Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo, i4-polos
induzidas.
Figura 2.13 – Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo, i2-polos
induzidas.
___________________________________________________________________________
19
___________________________________________________________________________
2.6. Simulação de Forças Radiais para Motor-Mancal Radial de Indução
Como forma de comparar o nível das forças de Maxwell, produzidas em um motormancal radial de indução 4-polos, utilizando cada um dos tipos de rotor apresentados nas
Figuras 2.9 e 2.11, algumas simulações foram realizadas utilizando o Método dos Elementos
Finitos – FEM.
O motor-mancal utilizado na simulação é do tipo trifásico. Cada fase possui seis
bobinas, sendo três a três ligadas em série e esses conjuntos divididos e alimentados
individualmente por correntes senoidais de mesmo ângulo de fase. As bobinas possuem cada
uma 103 espiras. A distribuição do enrolamento no estator pode ser verificada na Figura 3.1
no capítulo seguinte.
Como forma de avaliar a influência das forças produzidas em somente um eixo as
bobinas das outras duas fases não foram energizadas.
A Figura 2.14 apresenta a simulação, considerando um desbalanceamento de corrente
igual a 80% para ambas as bobinas da fase. A corrente nominal para a bobina é igual a 4,06
A. A força magnética de Maxwell para o motor com rotor 4-polos é 37,55% superior, àquela
produzida com o rotor em gaiola de esquilo convencional.
35
Rotor gaiola
Rotor 4-pólos
30
Força (N)
25
20
15
10
5
0
0
5
10
15
Tempo (ms)
20
25
30
Figura 2.14 – Força de Maxwell para motor com rotor gaiola e rotor 4-polos, delta i = 80%.
___________________________________________________________________________
20
___________________________________________________________________________
2.7. Conclusões
Em resumo, se pode afirmar que as forças de posicionamento radiais para o rotor são
geradas pela modificação da densidade de fluxo em regiões especificas do entreferro. Para
conseguir esta variação, altera-se o sentido e/ou a intensidade da corrente em um ou mais
grupos-bobinas do estator.
Pode-se dizer que, em ambos os tipos de máquinas, o enrolamento é dividido com o
fim de realizar a função mancal. Com relação ao tamanho da máquina, pode-se afirmar que as
máquinas do tipo enrolamento dividido se aproximam mais do tamanho das máquinas
convencionais, pois somente um enrolamento é utilizado sendo o estator idêntico aos dos
motores de indução convencionais.
As forças radiais produzidas por motores-mancais de indução com rotor gaiola de
esquilo são úteis para o posicionamento do rotor, apesar de serem em magnitude inferiores
àquelas produzidas nos motores-mancais com o rotor circuitos 4-polos.
A possibilidade de construção de motores-mancais com rotor gaiola de esquilo é
indicada também pela construção de protótipos de motores-mancais de indução, ainda que o
estator e/ou rotor tenham sofrido modificações.
___________________________________________________________________________
21
___________________________________________________________________________
Capítulo 3 – Modelo do Motor-Mancal de Indução do Tipo
Enrolamento Dividido
3.1. Introdução
O modelo utilizado e apresentado, neste trabalho, é tomado de (Ferreira, 2006). O
referencial do fluxo do rotor é utilizado por possuir um menor número de equações sem
perdas significativas da exatidão (Santisteban, 2001). Modelos em coordenadas do rotor
foram utilizados em outros trabalhos com motores-mancais nas últimas pesquisas realizadas
na UFRN (Ferreira, 2006), (Paiva, 2007).
A Figura 3.1 apresenta a distribuição das bobinas no estator e as correntes em cada
meio grupo do enrolamento para o motor-mancal utilizado na pesquisa.
ib1
ia2
i b1
i c2
i c1
i c2
ia2
ia1
i c1
ib2
i a1
ib2
Figura 3.1 – Esquema de distribuição das bobinas do estator.
O enrolamento será considerado como dois conjuntos de bobinas, a1– b1 – c1 e a2–
b2 – c2, defasadas de 120o entre si.
3.2. Modelo da Máquina
No modelo, para facilitar a manipulação e controle, as equações para o torque e a
velocidade são obtidas a partir de grandezas terminais.
___________________________________________________________________________
22
___________________________________________________________________________
3.2.1. Correntes do Rotor e Estator
De acordo com a Figura 3.1, os vetores de correntes, e os conjugados destes são dados
por (3.1) e (3.2)
iS 1 (t ) = ia1 (t ) + ib1 (t )e
j
2π
3
iS 1 * (t ) = ia1 (t ) + ib1 (t )e
iS 2 (t ) = ia 2 (t )e
jπ
iS 2 * (t ) = ia 2 (t ) e
+ ic1 (t )e
−j
+ ib 2 (t )e
− jπ
2π
3
−j
j
2π
3
+ ic1 (t )e
π
+ ic 2 (t ) e
3
+ ib 2 (t )e
−j
j
π
3
(3.1)
2π
3
j
π
3
+ ic 2 (t )e
−j
π
(3.2)
3
onde:
iS 1 e iS 2 são os vetores de correntes dos conjuntos de bobinas do estator;
*
*
iS 1 e iS 2 são os conjugados dos vetores de corrente do estator;
ia1 , ia 2 , ib1 , ib 2 , ic1 , ic 2 são os vetores de corrente das bobinas das fases a, b e c,
respectivamente.
Os vetores de correntes dados podem ser compactados como
iS ( t ) = iS 1 ( t ) + iS 2 ( t )
(3.3)
Para o motor-mancal com rotor em gaiola de esquilo, as correntes do rotor serão
tratadas como um reflexo das correntes do estator, identicamente para os motores de indução
convencionais. O vetor de correntes do rotor será representado por
iR (t ) = iRa (t ) + iRb (t )e
j
iR (t ) = iRa (t ) + iRb (t )e
*
2π
3
−j
+ iRc (t )e
2π
3
j
4π
3
+ iRc (t )e
−j
4π
3
(3.4)
As correntes do rotor serão um reflexo das correntes dos dois conjuntos de bobinas do
estator, pois a corrente por fase é sempre a mesma independente dos desbalanceamentos dos
dois meios grupos ligados à mesma fase. A orientação será tomada como sendo a do primeiro
grupo de bobinas trifásicas do estator.
___________________________________________________________________________
23
___________________________________________________________________________
3.2.2. Equações de Torque
*
[ LR ]−1[ LS 1R ](imR1 (t ) − iS 1 (t ))
2 rlµ 0 k1π
mM (t ) =
ℑ m iS ( t )
−1
g0
+ [ LR ] [ LS 2 R ](imR 2 (t ) − iS 2 (t ))
(3.5)
onde:
mM é o torque da máquina;
r, l são o raio e o comprimento do rotor, respectivamente;
µ0 é a constante de permeabilidade magnética do ar;
k1 é uma constante dependente do deslocamento radial do rotor;
g0 é o comprimento do entreferro;
ℑm é a
parte imaginária;
[LR] é a matriz de indutância própria do rotor;
[LS1R] e [LS2R] são as matrizes de indutâncias mútuas entre os conjuntos de bobinas do estator
e o rotor;
imR1 e imR 2 são os vetores de correntes de magnetização do rotor;
iS 1 e iS 2 são os vetores de correntes dos conjuntos de bobinas do estator.
Pode-se ainda considerar o torque da máquina como sendo composto das parcelas
mM1 e mM2, correspondentes a cada um dos conjuntos de bobinas do estator
*
[ LR ]−1[ LS 1R ](imR1 (t ) − iS 1 (t ))
2 rlµ 0 k1π
mM 1(t ) =
ℑ m iS 1 ( t )
+ [ L ]−1[ L ](i (t ) − i (t ))
g0
R
S 2R
mR 2
S2
(3.6)
*
[ LR ]−1[ LS 1R ](imR1 (t ) − iS 1 (t ))
2 rl µ 0 k1π
(3.7)
mM 2(t ) =
ℑ m iS 2 ( t )
−1
g0
+ [ LR ] [ LS 2 R ](imR 2 (t ) − iS 2 (t ))
3.2.3. Equações das Correntes de Magnetização
O modelo descrito pelas equações (3.6), (3.7) e (3.8) é apresentado na Figura 3.2
___________________________________________________________________________
24
___________________________________________________________________________
dimR 1 (t )
dε
= RR [ LRS 1 ]−1[ LR ]−1[ LRS 1 ] iS 1 (t ) + j
[ I ] − RR [ LRS 1 ]−1[ LR ]−1[ LRS 1 ] imR 1 (t )
dt
dt
dimR 2 (t )
dε
= RR [ LRS 2 ]−1[ LR ]−1[ LRS 2 ] iS 2 (t ) + j
[ I ] − RR [ LRS 2 ]−1[ LR ]−1[ LRS 2 ] imR 2 (t )
dt
dt
(3.8)
onde:
RR e є são a resistência de cada bobina do rotor e a posição angular do rotor.
dε
é a velocidade mecânica ωmec.
dt
Figura 3.2 – Diagrama de blocos do motor-mancal de indução tipo enrolamento dividido.
___________________________________________________________________________
25
___________________________________________________________________________
O modelo apresentado é equivalente a duas máquinas para a composição do torque de
saída. São gerados dois ângulos de fluxo do rotor, ρ1 e ρ2, onde cada um dos dois pode ser
usado como referência.
3.3. Modelo da Posição Radial
O modelo da posição será considerado inicialmente para uma direção. Em seguida,
será ampliado para três direções.
3.3.1. Modelo da posição para uma direção
Considerando o rotor como uma massa que pode se movimentar em um só eixo, o
modelo da posição para essa condição pode ser entendido observando-se a Figura 3.3 e
acompanhando o desenvolvimento que se segue.
As seguintes considerações são feitas:
•
A permeabilidade magnética do ferro é muito maior que a do ar;
•
O material ferromagnético está livre de saturação magnética;
•
O deslocamento do rotor ocorre somente na direção do eixo x;
•
Não há indutância mútua entre as bobinas a1 e a2;
•
As bobinas são consideradas concentradas, não distribuídas.
ia1
i a2
Figura 3.3 – Representação esquemática do fluxo magnético por um par de bobinas no estator de uma
máquina de quatro polos.
___________________________________________________________________________
26
___________________________________________________________________________
onde:
ia1, ia2 são as correntes nas bobinas a1 e a2, respectivamente;
d1, d2 são os valores de entreferro.
As correntes, nas bobinas, são dadas por um valor de referência e um valor diferencial.
No caso do rotor centralizado ia1 = ia2.
ia 1 = I a + ∆ ia
ia 2 = I a − ∆ ia
(3.9)
A força exercida sobre o rotor pode ser encontrada através da variação de energia
magnética do sistema como
Fx =
∂W
∂x
(3.10)
Para as bobinas a força é dada por
ia21
Fa1 = k 2
d1
Fa 2
k =
i2
= k a 22
d2
(3.11)
1 2
N µ A – onde N é o número de espiras da bobina, µ é a permeabilidade magnética do
4
meio, e A é a área eficaz atravessada pelo fluxo magnético.
Considerando-se o tamanho do entreferro como sendo g, e g0 a medida do entreferro
quando o rotor está centralizado, as equações de força para as bobinas são reescritas como
( I a + ∆ ia ) 2
Fa1 = k
( g − x)2
Fa 2
( I a − ∆ ia ) 2
=k
( g + x)2
(3.12)
Linearizando-se (3.12) em torno do ponto (x0, Ia) utilizando-se série de Taylor temos
___________________________________________________________________________
27
___________________________________________________________________________
2
Ia2
Ia
I
Fa1 ( x0 , I a ) = k 2 + 2 3 x + 2 a2 ∆ia
g0
g0
g0
2
Ia2
Ia
I
Fa 2 ( x0 , I a ) = k 2 − 2 3 x − 2 a2 ∆ia
g0
g0
g0
(3.13)
Em que (g0, Ia) é o ponto de operação e (x, ∆ia) são as variáveis de controle.
A equação de forças para o sistema é encontrada aplicando-se a primeira lei de
Newton
Fa1 − Fa 2 + Fext
dx 2
=m 2
dt
(3.14)
que conduz a
m
Ia2
dx 2
Ia
=
4
k
x
+
∆
i
+ Fext
a
3
2
dt 2
g
g
0
0
(3.15)
(g0, Ia) é o ponto em torno do qual as variáveis atuam, sendo considerados constantes.
A equação (3.15) pode ser reescrita como
dx 2
Fext
Ka
x
Kb
i
=
.
+
.
∆
+
a
dt 2
m
2
(3.16)
2
Ia
Ia
e
Kb
=
4
k
As constantes de (3.16) são Ka = 4 k
.
m.g 03
m.g 02
Desprezando-se a força externa Fext e aplicando a transformada de Laplace com
condições iniciais nulas, temos a função no domínio da frequência que é dada por
X (s) =
Kb .∆ I ( s )
s 2 − Ka
(3.17)
Arranjando (3.17), a função de transferência passa a ser:
___________________________________________________________________________
28
___________________________________________________________________________
G(s) =
X (s)
Kb
= 2
∆I ( s ) s − Ka
(3.18)
3.3.2. Modelo da posição para três direções
Em se tratando do entreferro da máquina, o motor-mancal de indução diferencia-se do
motor de indução convencional por possuir entreferro não constante, variando desde zero até
duas vezes o comprimento do entreferro para o rotor centralizado no estator. A Figura 3.4
apresenta a vista da seção transversal da máquina com a representação das forças de
posicionamento produzidas por cada bobina.
Figura 3.4 – Corte transversal do motor-mancal com rotor descentralizado.
O entreferro, ao longo da circunferência do estator pode ser encontrado através da
seguinte expressão:
d ( x , y , α ) = g 0 − x cos(α ) − ysen (α )
(3.19)
onde α é o ângulo observado para o deslocamento do rotor, conforme Figura (3.5).
Considerando-se que as bobinas do estator se encontrem em qualquer posição em
relação aos eixos x e y, a expressão genérica para o entreferro deve também ser função da
defasagem desta bobina, como pode ser observado na Figura 3.6. Assim a expressão do
entreferro passa a ser:
___________________________________________________________________________
29
___________________________________________________________________________
d ( x , y , α ,η ) = g 0 − x cos(α + η ) − ysen (α + η )
(3.20)
O entreferro para cada uma das bobinas é apresentado na Tabela 3.1.
a
a
Figura 3.5 – Detalhe do ângulo no deslocamento do rotor.
Figura 3.6 – Esquema de bobinas do estator.
Tabela 3.1 – Entreferro para bobinas.
Bobina
Ângulo α (rad)
Entreferro
a1
0
g0 – xcos(η) – ysen(η)
a2
2π
g0 + xcos(η) + ysen(η)
b1
2π/3
g0 – xcos(2π/3+η) – ysen(2π/3+η)
b2
-π/3
g0 – xcos(-π/3+η) – ysen(-π/3+η)
c1
-2π/3
g0 – xcos(-2π/3+η) – ysen(-2π/3+η)
c2
π/3
g0 – xcos(π/3+η) – ysen(π/3+η)
___________________________________________________________________________
30
___________________________________________________________________________
Substituindo o entreferro de acordo com a Tabela 3.1 em (3.4), vem:
( I + ∆ia ) 2
Fa1 = k
( g 0 − xcos (η ) − ysen (η )) 2
Fa 2
( I − ∆ ia ) 2
=k
( g 0 + xcos (η ) + ysen (η )) 2
Fb1 = k
( I + ∆ib ) 2
( g 0 − xcos ( 2π / 3 + η ) − ysen ( 2π / 3 + η )) 2
Fb 2 = k
( I + ∆ ib ) 2
( g 0 − xcos ( −π / 3 + η ) − ysen ( −π / 3 + η )) 2
Fc1 = k
( I + ∆ic ) 2
( g 0 − xcos ( −2π / 3 + η ) − ysen ( −2π / 3 + η )) 2
Fc 2 = k
( I + ∆ ic ) 2
( g 0 − xcos (π / 3 + η ) − ysen (π / 3 + η )) 2
(3.21)
Linearizando-se as expressões para x e y, temos:
I2
I2
I2
I
Fa1 x = k 2 + 2cos (η ) 3 x + 2 sen (η ) 3 y + 2 2 ∆ia cos (η )
g0
g0
g0
g0
I2
I2
I2
I
Fa 2 x = k 2 − 2cos (η ) 3 x − 2 sen (η ) 3 y − 2 2 ∆ia cos (π + η )
g0
g0
g0
g0
I2
2π
I2
2π
I2
I
2π
Fb1 x = k 2 + 2cos (
+ η ) 3 x + 2 sen (
+ η ) 3 y + 2 2 ∆ib cos (
+η)
3
3
3
g
g
g
g
0
0
0
0
Fb 2 x
I2
I2
I2
I
π
π
π
= k 2 + 2cos ( − + η ) 3 x + 2 sen ( − + η ) 3 y − 2 2 ∆ib cos ( − + η )
3
3
3
g0
g0
g0
g0
I2
2π
I2
2π
I2
I
2π
Fc1 x = k 2 + 2cos ( −
+ η ) 3 x + 2 sen ( −
+ η ) 3 y + 2 2 ∆ic cos ( −
+η)
3
3
3
g0
g0
g0
g0
I2
π
π
π
I2
I2
I
Fc 2 x = k 2 + 2cos ( + η ) 3 x + 2 sen ( + η ) 3 y − 2 2 ∆ic cos ( + η )
3
3
3
g0
g0
g0
g0
(3.22)
___________________________________________________________________________
31
___________________________________________________________________________
I2
I2
I2
I
Fa1 y = k 2 + 2cos (η ) 3 x + 2 sen (η ) 3 y + 2 2 ∆ ia sen (η )
g0
g0
g0
g0
I2
I2
I2
I
Fa 2 y = k 2 − 2cos (η ) 3 x − 2 sen (η ) 3 y − 2 2 ∆ ia sen (π + η )
g0
g0
g0
g0
I2
I2
I2
I
2π
2π
2π
Fb1 y = k 2 + 2cos (
+ η ) 3 x + 2 sen (
+ η ) 3 y + 2 2 ∆ ib sen (
+η)
3
3
3
g0
g0
g0
g0
I2
π
π
π
I2
I2
I
Fb 2 y = k 2 + 2cos ( − + η ) 3 x + 2 sen ( − + η ) 3 y − 2 2 ∆ ib sen ( − + η )
3
3
3
g0
g0
g0
g0
I2
I2
I2
I
2π
2π
2π
Fc1 y = k 2 + 2cos ( −
+ η ) 3 x + 2 sen ( −
+ η ) 3 y + 2 2 ∆ ic sen ( −
+η)
3
3
3
g
g
g
g
0
0
0
0
2
2
2
I
π
π
π
I
I
I
Fc 2 y = k 2 + 2cos ( + η ) 3 x + 2 sen ( + η ) 3 y − 2 2 ∆ ic sen ( + η )
3
3
3
g0
g0
g0
g0
(3.23)
As forças, nas direções x e y, são dadas pela soma das parcelas nestas respectivas
direções:
Fx = Fa1 x + Fa 2 x + Fb1 x + Fb 2 x + Fc1 x + Fc 2 x
F y = Fa1 y + Fa 2 y + Fb1 y + Fb 2 y + Fc1 y + Fc 2 y
(3.24)
___________________________________________________________________________
32
___________________________________________________________________________
I2
π
π
2π
2π
+ η ) + cos ( − + η ) + cos ( −
+ η ) + cos ( + η )
2 cos (
3
3
3
3
g0
π
2π
2
2 2π
2
2
η
η
η
η
c
os
c
os
c
os
c
os
2
(
)
+
(
+
)
+
(
−
+
)
+
(
−
+
)
2
3
3
3
+ 2 I x
3
π
g0
+ cos 2 ( + η )
3
2π
2π
2 sen (η )cos (η ) + sen ( 3 + η ) cos ( 3 + η ) +
I2
2π
2π
π
π
Fx = k + 2 3 y + sen ( − + η ) cos ( − + η ) + sen ( −
+ η )cos ( −
+ η ) + Fextx
3
3
3
3
g0
+ sen ( π + η )cos ( π + η )
3
3
+ 4 ∆i I cos (η ) + 2 ∆i I cos ( 2π + η ) − cos ( − π + η ) +
a
b
2
2
3
3
g0
g0
π
I
2π
+ 2 ∆ic 2 cos ( − 3 + η ) − cos ( 3 + η )
g0
(3.25)
I2
π
π
2π
2π
2 sen ( 3 + η ) + sen ( − 3 + η ) + sen ( − 3 + η ) + sen ( 3 + η )
g0
π
π
2
2
η
η
η
η
+
+
+
+
2
c
os
(
)
sen
(
)
c
os
(
)
sen
(
)
3
3
π
π
I2
2π
2π
+ 2 3 x + cos ( − 3 + η ) sen ( − 3 + η ) + cos ( − 3 + η ) sen ( − 3 + η ) +
g0
+ cos ( π + η ) sen ( π + η )
3
3
π
π
π
2
2
Fy = k
+ Fexty
2 sen 2 (η ) + sen 2 (
+ η ) + sen 2 ( − + η ) + sen 2 ( −
+ η )
2
I
3
3
3
+ 2 3 y
g0
2 π
+ sen ( + η )
3
+ 4 ∆i I sen (η ) + 2 ∆ i I sen ( 2π + η ) − sen ( − π + η )
a
b
2
2
3
3
g0
g0
+ 2 ∆i I sen ( − 2π + η ) − sen ( π + η )
c
2
3
3
g0
(3.26)
___________________________________________________________________________
33
___________________________________________________________________________
Considerando as simplificações trigonométricas
π
π
2π
2π
+ η ) + cos ( − + η ) + cos ( −
+ η ) + cos ( + η ) = 0
3
3
3
3
π
π
2π
2π
2 cos 2 (η ) + cos 2 (
+ η ) + cos 2 ( − + η ) + cos 2 ( −
+ η ) + cos 2 ( + η ) = 3
3
3
3
3
π
π
2π
2π
2 sen (η )cos (η ) + sen (
+ η )cos (
+ η ) + sen ( − + η )cos ( − + η ) +
3
3
3
3
π
π
2π
2π
sen ( −
+ η )cos ( −
+ η ) + sen ( + η ) cos ( + η ) = 0
3
3
3
3
cos (
(3.27)
2π
2π
π
π
+ η ) + sen ( − + η ) + sen ( −
+ η ) + sen ( + η ) = 0
3
3
3
3
2π
2π
π
π
2 sen (η )cos (η ) + sen (
+ η )cos (
+ η ) + sen ( − + η )cos ( − + η ) +
3
3
3
3
2π
2π
π
π
sen ( −
+ η )cos ( −
+ η ) + sen ( + η )cos ( + η ) = 0
3
3
3
3
π
π
2π
2π
2 sen 2 (η ) + sen 2 (
+ η ) + sen 2 ( − + η ) + sen 2 ( −
+ η ) + sen 2 ( + η ) = 3
3
3
3
3
(3.28)
sen (
Assim (3.25) e (3.26), se reduzem a:
I2
I
I
2π
π
6 3 x + 4 ∆ia 2 cos (η ) + 2 ∆ib 2 cos ( 3 + η ) − cos ( − 3 + η )
g
g0
g0
Fx = k 0
+ Fextx
π
I
2π
+ η ) − cos ( + η )
+ 2 ∆ic 2 cos ( −
3
3
g0
(3.29)
I2
I
I
2π
π
6 3 y + 4 ∆ia 2 sen (η ) + 2 ∆ib 2 sen ( 3 + η ) − sen ( − 3 + η )
g
g0
g0
Fy = k 0
+ Fexty
π
I
2π
+ η ) − sen ( + η )
+ 2 ∆ ic 2 sen ( −
3
3
g0
(3.30)
___________________________________________________________________________
34
___________________________________________________________________________
Na forma matricial, temos:
I2
6 3
Fx
g0
F = k
y
0
4
+ k
4
x +
2
I y
6 3
g 0
0
I
cos (η )
2
g0
2
I
2
g0
2π
π
cos ( 3 + η ) − cos ( − 3 + η )
I
sen (η )
2
g0
2
I
2
g0
2π
π
sen ( 3 + η ) − sen ( − 3 + η )
2π
π
cos ( − 3 + η ) − cos ( 3 + η ) ∆ia
∆i
b
I
2π
π
2 2 sen ( −
+ η ) − sen ( + η ) ∆ic
3
3
g0
2
I
2
g0
Fextx
+
Fexty
(3.31)
que é a expressão para a força nas direções x e y na forma matricial.
A Figura 3.7 apresenta o diagrama de blocos completo, envolvendo o modelo da
posição.
Figura 3.7 – Diagrama de blocos geral do motor-mancal.
O diagrama de blocos do modelo da posição é mostrado na Figura 3.8.
___________________________________________________________________________
35
___________________________________________________________________________
Figura 3.8 – Diagrama de blocos do modelo da posição.
3.4. Simulação de Forças Radiais para o Modelo
Com o objetivo de avaliar o comportamento das forças magnéticas produzidas pelas
bobinas do estator do motor-mancal, algumas simulações foram realizadas, utilizando-se o
Método dos Elementos Finitos através do aplicativo Ansoft Maxwell®. As principais medidas
do motor-mancal de indução trifásico, 3,75 kW, 4 polos, 380 V, 60 Hz, In = 8,12 A, 103
espiras/bobina, entreferro 0,20 mm, são apresentadas na Tabela 3.2. Outras características e
ensaios do motor podem ser verificados no Apêndice A.
Tabela 3.2 – Dimensões do motor.
Estator
Rotor
Diâmetro interno (mm)
100,0
Diâmetro externo (mm)
220,0
Número de ranhuras
36
Número de espiras/ranhura
103
Diâmetro interno (mm)
30,0
Diâmetro externo (mm)
99,6
Número de ranhuras
28
Comprimento (mm)
130,0
A Figura 3.9 apresenta a distribuição dos grupos de bobinas das três fases no estator.
Em cada uma das fases, os grupos estão divididos em duas partes, sendo alimentados
independentemente. Uma metade do grupo da fase a, representada por BOBINA “a1”, é
composta por 3 bobinas ligadas em série. As demais metades dos grupos de bobinas das fases
também são compostas por 3 bobinas.
___________________________________________________________________________
36
___________________________________________________________________________
Figura 3.9 - Distribuição do enrolamento do motor-mancal de indução enrolamento dividido.
Com o rotor centralizado no estator, as correntes de cada uma das metades do grupo de
bobinas da fase a, BOBINA “a1” e BOBINA “a2”, foram variadas, iniciando-se com ia1 =
0,00 A e ia2 = 5,74 A, aumentando-se a corrente ia1 e diminuindo-se a corrente ia2 até que ia1 =
5,74 A e ia2 = 0,00 A. As variações de corrente, para ambas as metades de grupo da fase,
foram realizadas com passos de 0,287 A. As Figuras 3.10, 3.11 e 3.12 mostram as simulações
do comportamento do fluxo magnético e também dos vetores de densidade de fluxo
magnético que produzem as forças de posicionamento no rotor.
(a)
(b)
Figura 3.10 – Simulações do motor pelo FEM, ia1 = 5,74 A e ia2 = 0,29 A: (a) Comportamento do
fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor.
___________________________________________________________________________
37
___________________________________________________________________________
(a)
(b)
Figura 3.11 – Simulação do motor por FEM, ia1 = 2,87 A e ia2 = 2,87 A: (a) Comportamento do
fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor.
(b)
(a)
Figura 3.12 – Simulação do motor por FEM, ia1 = 0,29 A e ia2 = 5,74 A: (a) Comportamento do fluxo
magnético; (b) Vetores de densidade de fluxo magnético rotor.
Na Figura 3.10, a distribuição de fluxo e também dos vetores de densidade de fluxo
magnético se concentram em grande parte na bobina superior, aquela que tem a maior
magnitude de corrente.
___________________________________________________________________________
38
___________________________________________________________________________
Quando se aplica correntes de igual amplitude, a distribuição de fluxo e também dos
vetores de densidade de fluxo magnético são iguais para cada uma das bobinas, Figura 3.11.
As distribuições apresentadas nas Figuras 3.10, 3.11 e 3.12, confirmam a possibilidade
de controle das forças magnéticas que agem sobre o rotor, ajustando as correntes que
alimentam as bobinas de forma a obter maior densidade de fluxo na direção e sentido
pretendidos.
A Figura 3.13 apresenta o comportamento das forças no rotor, devido às variações de
corrente nos meios grupos de bobinas alinhadas com o eixo y (BOBINA “a1” e BOBINA
“a2”).
FORÇAS RADIAIS x VARIAÇÕES DE CORRENTE NAS BOBINAS
1500
1000
500
Força (N) 0
-500
-1000
Fx
Fy
-1500
0
1
2
3
Corrente (A)
4
5
6
Figura 3.13 – Forças radiais, no rotor, devido à variação de correntes nas bobinas a1 e a2.
A força radial obtida, relativamente grande para variações de correntes mais
acentuadas, é capaz de mover o rotor. A relação entre as forças radiais produzidas pelas
variações de corrente é linear, como esperada para possibilidade de controle (Bessa, 1997).
3.5. Conclusões
O modelo elétrico do motor-mancal apresentado, dadas as simplificações, aproxima-se
do modelo do motor de indução convencional. Simulações, realizadas para a força produzida
por um par de bobinas, também apresenta uma relação linear, indicando a possibilidade de
realização do controle através da variação nas correntes das bobinas do estator.
___________________________________________________________________________
39
___________________________________________________________________________
Capítulo 4 – Características do Motor de Indução para Aplicação
Motor-Mancal
4.1. Introdução
Os motores de indução convencionais são máquinas bastante simples do ponto de vista
construtivo, comparado aos motores síncronos e de corrente contínua. A diferença principal
destes motores se encontra no tipo de rotor de cada um deles.
O rotor em gaiola de esquilo pode ser usado para motores de indução com qualquer
número de polos, inclusive para motores que possuem mais de uma velocidade de operação,
quer essa velocidade seja obtida por comutação de polos ou por comutação de enrolamento,
sendo apropriado para a maximização do torque.
Os motores-mancais de indução, como já observado, necessitam de certo equilíbrio
entre a produção de torque e de forças radiais. Esse duplo compromisso tem conduzido às
modificações na estrutura do motor de indução convencional que intencionam melhorias de
desempenho, no geral, relacionadas ao aumento da magnitude das forças radiais necessárias à
centralização do rotor no estator, considerando um ou mais graus de liberdade (Chiba et al.,
1996).
As modificações, no motor, em geral, são trabalhosas e onerosas, pois necessitam de
construção específica de todo o motor ou de alguma parte deste. As modificações da máquina
são realizadas no rotor, estator ou em ambos, seja no aumento do tamanho do eixo, no
aumento no número de estatores, na duplicação do número de enrolamentos no rotor, no
aumento do número de enrolamentos, na mudança na forma da gaiola de esquilo, entre outras.
Como exemplo dessas mudanças, podem-se citar as máquinas utilizadas nos seguintes
trabalhos:
•
(Gomes, 2007) – motor de indução bifásico com duplo estator e duplo rotor em gaiola
de esquilo, montados em um mesmo eixo;
•
(Castro, 2004) – motor de indução trifásico de duplo estator, com dois rotores em
gaiola de esquilo modificada, montados em um mesmo eixo;
•
(Chiba, 1993) – motor de indução trifásico com duplo enrolamento e rotor em gaiola
de esquilo modificada, estrutura 4-polos.
Neste trabalho, de forma inovadora, busca-se utilizar o motor de indução convencional
para aplicação de motores-mancais de forma que se minimizem os custos e o trabalho
___________________________________________________________________________
40
___________________________________________________________________________
necessário para a construção de tais máquinas. Como será visto, as forças radiais produzidas
por motores de indução convencionais, sem modificações no tipo de rotor, são suficientes
para restaurar a posição do rotor.
Nos tópicos que se seguem as características dos diversos tipos de motores de indução
convencionais são avaliadas com o fim de indicar aqueles que mais se adéquam à construção
de motores-mancais radiais de indução.
4.2. Tipos de Motores de Indução
Em geral, os motores de indução são classificados segundo a fonte de alimentação,
tipo de rotor e modo de funcionamento (Weg, 2005). Observando-se os estatores e
enrolamentos de cada um desses motores, pode-se ainda notar diversas características não
identificáveis nessa classificação, mas que são importantes, referindo-se à utilização desses
motores para a aplicação motores-mancais. Algumas destas são: tipo de enrolamento,
fechamento das bobinas do estator, formação dos polos do motor (ativos, conseqüentes),
número de polos, etc.
A Figura 4.1, mostra a classificação dos diversos tipos de motores de indução,
conforme pode ser encontrado na literatura de motores elétricos.
Figura 4.1 – Tipos de motores de indução.
4.3. Tipos de Alimentação
A alimentação de um motor de indução, seja monofásica ou trifásica, é feita por
corrente alternada, indicando o número de fases ligadas ao estator. Em cada motor, os
___________________________________________________________________________
41
___________________________________________________________________________
estatores são construídos de forma que um campo magnético girante equilibrado seja
produzido pela alimentação com corrente senoidal polifásica.
A produção do campo magnético girante pelas correntes alternadas, que alimentam o
enrolamento do estator, depende não somente do número de fases e da defasagem entre estas,
mas também do defasamento espacial dos grupos de bobinas. Genericamente, dado um
conjunto de n grupos iguais, cujos eixos incidam em um mesmo ponto e sejam alimentados
por corrente senoidal de mesma frequência e intensidade, para que seja produzido um campo
magnético girante de intensidade e velocidade constante, a defasagem entre os grupos e entre
as correntes que os alimentam deve ser igual a
produzido será igual a
H M .(n / 2) ,
360o / n . A intensidade do campo girante
onde HM é o valor máximo do campo produzido por
cada um dos grupos (Fitzgerald, 2003).
As expressões das forças magnetomotrizes para produção dos campos magnéticos
girantes para motores bifásicos e trifásicos são dadas respectivamente por
FMM (θ , t ) = FM . cos(ωt − θ )
FMM (θ , t ) =
3
FM . cos(ωt − θ )
2
(4.1)
(4.2)
onde:
FM é a amplitude da FMM máxima produzida pelos grupos;
ω é a frequência angular das correntes;
θ é o ângulo de um ponto genérico no entreferro;
t é o tempo.
Teoricamente, os motores elétricos de indução podem ser alimentados por qualquer
número de fases, mas, por razões técnicas e econômicas, tanto os sistemas de distribuição de
energia existentes quanto os motores de indução convencionais, são trifásicos ou
monofásicos.
A geração de campo magnético girante nos motores-mancais de indução ocorre da
mesma maneira que nos motores de indução convencionais. Para os motores-mancais de
indução trifásicos, a força magnetomotriz resultante F(θ) em qualquer direção do entreferro é
dada por:
___________________________________________________________________________
42
___________________________________________________________________________
F (θ ) = Fa (θ ) + Fb (θ ) + Fc (θ )
(4.3)
A FMM produzida por cada uma das bobinas do estator é dada por:
Fa (θ ) = N ia .cos (θ )
Fb (θ ) = N ib .cos (θ − 2π / 3)
Fc (θ ) = N ic .cos (θ + 2π / 3)
(4.4)
As correntes ia, ib e ic são funções senoidais que variam no tempo, assim a FMM
resultante passa a ser:
F (θ ) = NI m cos (ω t )cos (θ )
+ NI m cos (ω t − 2π / 3)cos (θ − 2π / 3)
+ NI m cos (ω t + 2π / 3)cos (θ + 2π / 3)
(4.5)
Pelo uso de identidade trigonométrica cosA cosB = ½ (cos(A – B)) + ½ (cos(A +B)),
pode-se escrever F(θ) como sendo:
F (θ ) =
1
1
N I m . cos (ωt − θ ) + N I m . cos (ωt + θ ) +
2
2
1
1
N I m . cos (ωt − θ ) + N I m . cos (ωt + θ − 2π / 3)
2
2
1
1
N I m . cos (ωt − θ ) + N I m . cos (ωt + θ + 2π / 3)
2
2
(4.6)
Como a soma das parcelas segunda, quarta e sexta é igual a zero, a força
magnetomotriz resultante é igual à expressão já apresentada em (4.2):
F (θ ) =
3
N I m . cos (ω t − θ )
2
(4.2)
A equação (4.2) representa a resultante da força magnetomotriz girante no entreferro
com frequência angular ω = 2πf. Dessa equação, nota-se que, para uma força magnetomotriz
constante em amplitude e velocidade, é necessário que as correntes, que alimentam os três
grupos de bobinas, tenham mesma amplitude e mesma frequência angular. Diferenças entre as
magnitudes e/ou fase das forças magnetomotrizes produzem torque pulsante.
Nos motores-mancais do tipo enrolamento dividido as variações de correntes
produzem variação na amplitude e direção das forças de restauração da posição do rotor.
___________________________________________________________________________
43
___________________________________________________________________________
Grandes variações de amplitudes podem conduzir a pulsações de torque que por sua vez
perturbam o posicionamento do eixo conduzindo a instabilidade.
No ponto mais crítico de variação da posição, eixo mais próximo do estator, as
variações de corrente para um par de bobinas pode chegar a duas vezes a corrente de operação
do grupo.
Para o motor com o rotor centralizado uma variação de corrente do grupo da ordem de
100% implicaria em multiplicar por 2 a corrente de metade do grupo e multiplicar por zero a
corrente da outra metade do grupo. Essa condição produz a geração de força magnetomotriz
conforme (4.7):
F (θ ) = N I m . cos (ωt − θ ) + N I m . cos (ω t + θ ) +
1
1
N I m . cos (ω t − θ ) + N I m . cos (ω t + θ − 2π / 3)
2
2
1
1
N I m . cos (ωt − θ ) + N I m . cos (ωt + θ + 2π / 3)
2
2
(4.7)
Que conduz a:
1
F (θ ) = 2 N I m . cos (ω t − θ ) + N I m . cos (ω t + θ )
2
(4.8)
Comparando-se as equações (4.2) e (4.8), nota-se que o torque do motor será tanto
mais pulsante quanto maior for o desequilíbrio provocado pelo controle de posição. Assim,
para um funcionamento mais estável, é importante que a posição do eixo não varie bastante,
fugindo da vizinhança do centro do estator, em outras palavras, o ponto de operação deve ser
o mais próximo possível da referência.
No caso do rotor não estar centralizado, a força magnetomotriz produzida não será
expressa exatamente por (4.8), devido às variações das indutâncias produzidas com o
deslocamento radial do rotor (Ferreira, 2006).
A priori, pode-se dizer que não existem restrições quanto à alimentação. Motores de
indução convencionais, monofásicos e/ou trifásicos, podem ser úteis para aplicação de
motores-mancais. A Figura 4.2(a) mostra o diagrama de ligação do enrolamento do estator
para um motor de indução trifásico convencional, cujos grupos de cada fase são representados
por duas bobinas ligadas em paralelo. A Figura 4.2(b) mostra a ligação desse mesmo motor
no caso de aplicação como motor-mancal do tipo enrolamento dividido. A divisão das bobinas
de cada fase, no motor-mancal, permite a alimentação por correntes impostas, possibilitando o
___________________________________________________________________________
44
___________________________________________________________________________
controle de posicionamento do rotor pelo método de atuação diferencial das correntes nas
bobinas do estator, como visto anteriormente.
No motor-mancal, em cada metade do grupo, as correntes estão em fase e para
frequências próximas a nominal; não apresentam dificuldades para controle da posição do
rotor, visto que se aproveita a componente média das forças pulsantes. A operação em baixas
frequências pode implicar em problemas para manter uma força média útil capaz de restaurar
a posição do rotor (Ferreira, 2002), devido à dificuldade de estabilizar o sistema durante o
período de troca de polaridade.
Figura 4.2 – Ligação em estrela: (a) motor de indução trifásico; (b) motor-mancal de indução
trifásico.
Alinhando-se as bobinas de uma das fases com o eixo x (ângulo η = 0), a força
magnética radial Fm, dada pelo modelo apresentado em (3.29) e (3.30) para os eixos x e y,
serão:
I2
I
I
I
Fx = k 6 3 x + 4 ∆i a 2 − 2 ∆ib 2 − 2 ∆ic 2 + Fextx
g0
g0
g 0
g 0
(4.10)
I2
I
I
F y = k 6 3 y + 2 3 .∆ib 2 − 2 3 .∆ic 2 + Fexty
g0
g0
g0
(4.11)
Considerando que os grupos de cada fase sejam alimentados por correntes alternadas
senoidais, cada uma das parcelas, exceto Fextx, terá um termo que depende de cos2ωt. Devido a
esse termo, a força resultante produz um termo médio e um termo oscilante com o dobro da
frequência da corrente de excitação, cos2ωt = ½ + cos(2ωt).
___________________________________________________________________________
45
___________________________________________________________________________
A Figura 4.3 apresenta a seção transversal de um motor de indução monofásico com
potência nominal 1,2 KW, 1715 RPM, 220 V, utilizado para simulação de forças radiais. A
Figura 4.4 apresenta a simulação de forças radiais nas direções x e y realizadas para um
motor-mancal 4-polos, estator 24 ranhuras, rotor 16 ranhuras. Na simulação por FEM,
somente as bobinas do grupo de trabalho do motor foram alimentadas com corrente nominal,
60 Hz. O motor foi simulado com o rotor sem a gaiola de esquilo.
Figura 4.3 – Motor-mancal monofásico.
Força Radial eixo x
1200
Fx
Fy
1000
Force (N)
800
600
400
200
0
-200
0
20
40
60
80
100
tempo (ms)
120
140
160
180
Figura 4.4 – Força radial no motor monofásico, f = 60 Hz.
___________________________________________________________________________
46
___________________________________________________________________________
Durante o tempo em que a corrente em cada meio grupo passa pelo zero, ocorre certa
falta de controle que se torna crítica no caso de baixas frequências das correntes de
alimentação.
Um maior número de fases para alimentação do motor contribui para um melhor
controle, pois se considera a interação entre todas as fases, aproveitando-se a defasagem entre
elas para geração da força magnética para posicionamento do rotor. O preço pago pelo
aumento do número de fases para alimentação de um motor mancal é o aumento do número
de braços de inversores necessários para imposição de correntes para cada meio grupo de cada
uma das fases do motor.
4.4. Tipos de Rotores
Os motores de indução são construídos com rotores do tipo enrolado ou do tipo gaiola
de esquilo. Os motores de indução com rotor enrolado, por possuírem escovas, apresentam
dificuldades para aplicação em alguns tipos de motores-mancais.
As escovas, pressionadas por molas, apoiam-se sobre os anéis coletores instalados na
superfície do rotor. Assim, para motores-mancais, cujo eixo permita o controle de quatro
graus de liberdade radiais na ausência dos mancais mecânicos, o conjunto escovas-anéis
coletores funcionaria como mancal radial em uma das extremidades do rotor, inviabilizando
sua utilização para construção de máquinas que por concepção não possuem mancal. Para
máquinas com somente dois graus de liberdade radiais, o uso deste tipo de motor é viável.
Deve-se, no entanto, afirmar que a dificuldade para utilização de motores de indução
com rotor enrolado consiste no fato do mesmo possuir escovas e anéis coletores que ficam em
contato com o rotor durante o funcionamento da máquina. Alternativamente, poder-se-ia
propor motores que possuíssem sistema de levantamento das escovas e curto-circuito dos
terminais das bobinas após a partida, (Weg, 2010). Motores de indução com este dispositivo
são fabricados atualmente para potências na faixa de 160 KW a 27 MW.
Se um aumento significativo de forças radiais para posicionamento do rotor puder ser
alcançado pelo uso do rotor enrolado, a exemplo do que se consegue com rotores com
estrutura 4-polos, deve-se ponderar esse ganho com o prejuízo da instalação de mecanismos
que possibilitem o uso temporário das escovas e anéis coletores. Resíduos de escovas e anéis
coletores comprometem o uso deste sistema para aplicações específicas como circulação de
fluídos sem contaminação.
___________________________________________________________________________
47
___________________________________________________________________________
Outra possibilidade para uso de motores de indução com rotor bobinado é curtocircuitar os terminais das bobinas do rotor e retirar as escovas e anéis coletores. O ganho
relacionado à melhoria das condições de partida, advindas pelo uso do rotor enrolado em
conjunto com resistências externas, pode ser igualmente alcançado com o acionamento por
inversores de potência que já são necessários para o controle dos motores-mancais. Além
disso, continuar utilizando escovas e anéis coletores, ainda que minimamente (somente
durante a partida), passa a ser uma fonte de manutenção, reduzindo a robustez.
Protótipos de motores-mancais, com rotores do tipo gaiola modificada, cujos terminais
são inacessíveis, foram utilizados em algumas pesquisas com motores-mancais de duplo
enrolamento (Chiba, 1998) e do tipo enrolamento dividido (Castro, 2004) (Ferreira, 2006)
(Paiva, 2007).
Protótipos de motores-mancais, com rotor do tipo gaiola de esquilo, foram utilizados
em alguns motores-mancais de indução, como pode ser visto em (Rodriguez, 2011), (David,
2000).
O rotor em gaiola de esquilo produz atraso e redução da resposta das forças de
posicionamento, devido ao fluxo produzido pelas correntes do rotor não variar bruscamente.
Para minimizar esses efeitos, tem-se modificado o rotor como já comentado ou se insere um
bloco de compensação de atraso de fase no sistema de controle (Nomura, 1993).
4.5. Modos de Operação
Os modos de partida, operação ou funcionamento diferenciam os diversos tipos de
motores de indução monofásicos. Para os motores trifásicos alguns poucos tipos podem ser
elencados.
As diferenças se encontram nos tipos de enrolamentos, ligação das bobinas e
fechamento dos grupos.
4.5.1. Motor monofásico
Os enrolamentos dos estatores dos motores monofásicos, em geral, podem ser
representados pela Figura 4.5. Nos motores monofásicos, o grupo auxiliar e o grupo principal
são responsáveis pela partida e operação do motor respectivamente. Estes grupos estão
defasados de 90º entre si.
___________________________________________________________________________
48
___________________________________________________________________________
ia
i
ip
Figura 4.5 – Esquema de um motor monofásico.
Na maioria dos motores monofásicos, além do grupo auxiliar são utilizados um
capacitor e uma chave centrífuga durante a partida. Alguns tipos de motores mantêm um
capacitor em operação após a partida do motor com a finalidade de defasar a corrente do
grupo de partida em relação à corrente do grupo principal. O defasamento das correntes
proporciona maior torque fazendo com que o motor monofásico opere mais próximo de um
motor bifásico.
Os motores-mancais necessariamente utilizam inversores de potência para realizar o
controle de posição e/ou velocidade. Os inversores permitem alterar a amplitude, a fase e a
frequência das correntes aplicadas aos grupos de bobinas do motor. Assim, para motoresmancais, construídos com motores de indução monofásicos, os equipamentos auxiliares são
desnecessários, devendo ser desligados, pois a alteração de fase pode ser realizada pelo
próprio inversor.
Teoricamente, observando-se somente a ligação do enrolamento do motor de indução,
o motor-mancal pode funcionar como:
a) Bifásico somente durante a partida;
b) Bifásico durante toda a operação do motor.
No primeiro caso, a produção de torque e de forças radiais para posicionamento do
rotor é realizada unicamente pelo grupo principal, Figura 4.6(a). Para o segundo caso, a
produção de toque é realizada por ambos os grupos, as forças radiais podem ser geradas por
um dos grupos, Figura 4.6(b), onde:
ia é a corrente do grupo auxiliar;
ip é a corrente do grupo principal;
∆ix e ∆iy são as correntes para controle de posição.
___________________________________________________________________________
49
___________________________________________________________________________
ip+ iy
ip+ iy
ia
ip+ ix
ip+ ix
ip - ix
ip- ix
i p - iy
i p - iy
(a)
(b)
Figura 4.6 – Esquema de ligação dos grupos do motor monofásicos para geração de forças radiais e
torque: (a) operação com um grupo; (b) operação com dois grupos.
Contudo, o grupo principal e o grupo auxiliar possuem número de espiras e/ou bitola
dos condutores das bobinas diferentes. Então, no caso de operação destes motores como
motor-mancal bifásico, a alimentação por corrente impostas deve levar em consideração que a
força magnetomotriz produzida no grupo auxiliar é diferente daquela produzida no grupo
principal o que pode conduzir à produção de torque não equilibrado para o motor.
O circuito elétrico do estator, para os diversos tipos de motores de indução
monofásicos, pode ser sintetizado na Figura 4.7.
Em um motor bifásico, a defasagem dos grupos (fase a e b) e das correntes (ia e ib) é
igual a 90º. No motor monofásico, a defasagem dos grupos é igual à do motor bifásico, mas a
defasagem das correntes (ia e ip) depende da impedância de cada um dos grupos.
ia
i
La
a
ip
Lp
c
p
Figura 4.7 – Diagrama de ligações dos grupos do motor monofásico.
___________________________________________________________________________
50
___________________________________________________________________________
Assim, motores-mancais, construídos a partir de motores monofásicos, apresentariam
dificuldades para operação como bifásicos, devido aos grupos auxiliar e principal não serem
idênticos. O uso dos dois grupos para operação como motor é dificultada, sendo necessário
avaliar as forças magnetomotrizes produzidas por ambos os grupos, com o fim de produzir
torque no motor de forma mais equilibrada possível.
O motor de Repulsão e polos sombreados utiliza a distorção do campo no entreferro
com o objetivo de criar um campo girante para a partida do motor. Como o campo é
distorcido, o efeito do mesmo precisa ser avaliado em conjunto com o controle de posição.
4.5.2. Motores trifásicos
Os motores de indução trifásicos, com rotor em gaiola de esquilo, possuem três grupos
de bobinas, um por cada fase, que são utilizados para a produção do campo magnético girante.
Nos motores-mancais de indução trifásicos do tipo enrolamento dividido, além da
produção de torque, os grupos de bobinas são responsáveis também pela produção de forças
radiais para posicionamento do rotor.
4.5.2.1. Número e formação de polos no estator
O número de polos das máquinas de indução é determinado pelo enrolamento do
estator. Nos motores-mancais de indução este número é determinado pelo tipo de estratégia
utilizada para obtenção das forças radiais e nos motores do tipo enrolamento dividido, deve
ser múltiplo de quatro.
A formação dos polos do estator é determinada pelo número, disposição e ligação das
bobinas do enrolamento do estator.
Em um motor elétrico de indução, os dentes das ranhuras, envolvidos por uma bobina,
constituem-se em polos ativos do motor; polos formados nas regiões entre dois polos ativos
são denominados conseqüentes.
Para um mesmo número de polos, os enrolamentos do estator constituídos de polos
ativos e consequentes, possuem metade da quantidade de bobinas daqueles constituídos
somente de polos ativos.
Os motores de indução convencionais são fabricados com estatores, cujo número de
polos pode ser 2, 4, 6 ou 8. Estatores com número de polos superior a dois podem ser
encontrados na configuração de polos ativos ou polos ativos e consequentes. A Figura 4.8
___________________________________________________________________________
51
___________________________________________________________________________
apresenta a distribuição de grupos para dois estatores 4-polos em ambas as configurações. Por
simplicidade, somente os grupos de bobinas de uma das fases estão representados.
Figura 4.8 – Distribuição dos grupos: (a) polos ativos; (b) polos ativos e consequentes.
Motores-mancais 4-polos, com estatores em ambas as configurações têm sido
utilizados (Ferreira, 2002), (Ferreira, 2006).
Em relação à ligação dos grupos para obtenção das forças radiais de posicionamento
do rotor os grupos podem ser ligados como apresentados na Figura 4.9. Por simplicidade,
somente os grupos de uma fase estão representados.
i- i
i+ i
i- i
i+ i
i- i
i- i
i+ i
i+ i
Figura 4.9 – Geração de forças radiais: (a) polos-consequentes; (b) polos-ativos por fase; (c) polosativos de fase.
A primeira configuração permite o controle das forças de posicionamento do rotor em
uma única direção; para outra direção, os grupos das demais fases devem ser utilizados. O
mesmo acontece para a segunda configuração. Para a terceira configuração, todos os grupos
de uma mesma fase são utilizados para possibilitar o controle das forças radiais.
___________________________________________________________________________
52
___________________________________________________________________________
No caso da terceira configuração, as outras fases podem também ser utilizadas para
geração de forças radiais para ambas as direções, aumentando com isso a intensidade da força
média útil para o posicionamento do rotor. No entanto, deve-se dizer que será necessário um
maior número de braços de inversores para que o controle das correntes em cada grupo possa
ser realizado individualmente.
O número de braços de inversores que devem ser utilizados para a operação do motormancal está relacionado ao número de fases, ao número de polos, à configuração utilizada na
formação de polos (ativos e/ou consequentes) e à configuração de ligação dos grupos para
obtenção das forças radiais para posicionamento do rotor.
Motores-mancais radiais de indução do tipo enrolamento dividido têm sido
construídos utilizando cada uma das configurações apresentadas na Figura 4.9 (Paiva, 2007),
(Ferreira, 2002), (Kauss, 2008).
4.5.2.2. Ligação do enrolamento dos motores de indução
A forma como os grupos de bobinas do enrolamento são ligados, implica na tensão de
alimentação. Nos motores monofásicos, os grupos podem ser conectados em série e/ou em
paralelo para as tensões de 220 e 110 V, respectivamente. O enrolamento do motor-mancal
pode ser ligado para qualquer das tensões.
Os motores de indução trifásicos convencionais são fabricados para operação nas
tensões 220, 380, 440 ou 760 V, sendo esta última utilizada somente para a partida do motor.
A Tabela 4.1 mostra a relação das tensões possíveis de acordo com o número de terminais do
motor.
Tabela 4.1 – Número de terminais x tensões de alimentação do motor
Número
Tensões (V)
de terminais
6
220 / 380
9
220 / 440
9
380 / 760
12
220 / 380 / 440 / 760
Os motores de 6 e 9 terminais permitem ligação em somente duas tensões. Os motores
de 9 terminais podem ser encontrados em dois tipos. As Figuras 4.10 a 4.14 apresentam os
diagramas de ligações desses motores.
___________________________________________________________________________
53
___________________________________________________________________________
Figura 4.10 – Digrama de ligações dos motores trifásicos 6 terminais: (a) 220 V; (b) 380 V.
Figura 4.11 – Digrama de ligações dos motores trifásicos 9 terminais: (a) 220 V; (b) 440 V.
___________________________________________________________________________
54
___________________________________________________________________________
Figura 4.12 – Digrama de ligações dos motores trifásicos 9 terminais: (a) 380 V; (b) 760 V.
O motor trifásico com terminais 9 se diferencia do motor com 12 terminais pela
ligação de três terminais internamente no estator. Nos motores que permitem a ligação para
220 / 440 V os terminais 1 – 12, 2 – 10 e 3 – 11, são conectados internamente no estator e são
disponibilizados na caixa de ligação como 1, 2 e 3; nos motores que permitem a ligação 380 /
760 V os terminais 10, 11 e 12 são ligados internamente no estator e não são disponibilizados
na caixa de ligação. Nas Figuras 4.11 e 4.12, a ligação interna destes terminais está
representada pelas linhas tracejadas.
Figura 4.13 – Digrama de ligações dos motores trifásicos 12 terminais: (a) 220 V; (b) 380 V.
___________________________________________________________________________
55
___________________________________________________________________________
Figura 4.14 – Digrama de ligações dos motores trifásicos 12 terminais: (a) 440 V; (b) 760 V.
Nos motores-mancais, a quantidade de terminais do motor, acessíveis na caixa de
ligação, é um dado importante, pois a estratégia de obtenção das forças radiais para
posicionamento do rotor utiliza a divisão dos grupos das fases para alimentação de forma
individualizada, conforme apresentado na Figura 4.2. Esse fato impossibilita a aplicação dos
motores de indução de 6 terminais para motores-mancais.
A ligação para as tensões 220 e 440 V é realizada com o fechamento do enrolamento
do motor em triângulo paralelo e triângulo série, respectivamente. Nesses tipos de ligações,
não há como disponibilizar a alimentação dos grupos de forma individualizada. Desse modo,
é necessário que o fechamento do enrolamento seja realizado em estrela paralela para a tensão
de 380 V, visto que a maior tensão é útil somente para a partida do motor. O fechamento em
estrela paralela pode ser observado na Figura 4.2(a) para o motor de indução e na Figura 4.2
(b) para o motor-mancal.
Um tipo de motor trifásico com fechamento do enrolamento de forma bem
particularizada é o motor conhecido como Dahlander. A ligação implica em uma relação de
polos 1:2 com consequente relação de rotação de 1:2.
O motor Dahlander permite a ligação em uma só tensão, geralmente 220 V. Podem ser
ligados de três diferentes formas: conjugado constante, potência constante e conjugado
variável. A Figura 4.15 apresenta os três diagramas de ligação do motor.
___________________________________________________________________________
56
___________________________________________________________________________
Figura 4.15 – Diagramas de ligação dos motores de indução trifásicos Dahlander.
A utilidade do motor Dahlander como motor-mancal precisa ser analisada com
algumas características já citadas como: possibilidade de ligação em estrela com terminais
acessíveis, permitindo a ligação de metade do grupo de cada fase por um braço de inversor e
número de polos múltiplo de quatro.
Avaliando-se as ligações possíveis para o motor, nota-se que somente seis terminais
são disponibilizados, impossibilitando o uso deste motor para aplicação motor-mancal assim
como no caso do motor de indução trifásico de 6 terminais.
Para que o motor Dahlander seja utilizado como motor-mancal, é necessário que as
conexões dos grupos de bobinas sejam modificadas internamente no estator. Mas isso
significa exatamente desfazer a “ligação Dahlander” que caracteriza esse tipo de motor em
relação aos motores de indução trifásicos padrão. Se for preferido esse caminho, pode-se mais
facilmente utilizar os motores trifásicos convencionais de 6 terminais.
___________________________________________________________________________
57
___________________________________________________________________________
Dado que a ligação do motor Dahlander seja desfeita, é necessário verificar se o motor
escolhido possui número de polos múltiplo de quatro para a configuração escolhida. A relação
de polos 1:2 nos motores Dahlander é conseguida utilizando-se a formação de polos ativos e
consequentes para baixa rotação e somente ativos para alta.
Motores Dahlander podem ser encontrados com as seguintes combinações de polos:
4:2, 8:4 ou 12:6.
O motor com relação de polos 4:2 somente pode ser utilizado para a aplicação motormancal se o fechamento do mesmo for realizado para baixa rotação, pois é nesta rotação que o
número de polos é múltiplo de quatro. No entanto, é necessário também que o fechamento
para este número de polos permita a ligação do motor em dupla estrela. Desse modo, para
conciliar estas duas características, somente a configuração potência constante pode ser
utilizada.
O motor com relação de polos 8:4 pode ser utilizado para aplicação motor-mancal
tanto em baixa como em alta rotação, visto que para ambas as rotações os números de polos
são múltiplos de quatro. O fechamento para ambas as rotações deve ser dupla estrela.
A configuração utilizada deve ser:
•
potência constante para operação em baixa rotação;
•
conjugado constante para alta rotação;
•
conjugado variável para alta rotação.
O motor com relação 12:6 pode ser utilizado para aplicação motor-mancal somente
para baixa rotação, dado que unicamente para esta rotação o número de polos é múltiplo de
quatro. A configuração potência constante deve ser utilizada, pois é a única que apresenta a
ligação em dupla estrela.
4.6. Conclusões
Os motores de indução são úteis para aplicação motor-mancal, observadas algumas
características imprescindíveis, tais como: número de polos múltiplo de quatro; possibilidade
de fechamento do enrolamento em dupla estrela; número de terminais acessíveis do
enrolamento estatórico maior ou igual a nove.
Os motores com rotor enrolado também podem ser utilizados, mas, para tanto, é
necessário curto-circuitar o enrolamento rotórico e retirar as escovas. O motor com rotor em
gaiola de esquilo pode ser utilizado sem modificações.
___________________________________________________________________________
58
___________________________________________________________________________
Nos motores trifásicos, é possível se obter um maior nível de produção de forças
radiais úteis para o posicionamento do rotor quando comparado aos motores monofásicos. Os
motores monofásicos também são úteis para aplicação motor-mancal, mas seu uso demanda
maiores modificações.
Os motores de indução convencionais úteis para aplicação com suas devidas
observações podem ser sintetizados na Tabela 4.2.
___________________________________________________________________________
59
___________________________________________________________________________
Tabela 4.2 – Motores de indução úteis para aplicação motor-mancal.
Alimentação
Rotor
Operação
Observações
-Número de polos múltiplo de 4;
Fase
Dividida
- O grupo auxiliar pode ser utilizado após a partida do
motor;
- Os elementos auxiliares de partida, chave centrífuga e
capacitor devem ser desconectados do motor.
- Número de polos múltiplo de 4;
Capacitor
de partida
- O grupo auxiliar pode ser utilizado após a partida do
motor;
- Os elementos auxiliares de partida devem ser
desconectados do motor.
Gaiola de
Monofásico
Esquilo
- Número de polos múltiplo de 4;
Capacitor
permanente
- O grupo auxiliar pode ser utilizado para a produção de
torque e forças radiais de posicionamento do rotor;
- Os elementos auxiliares de partida devem ser
desconectados do motor.
Polos
sombreados
- Apresenta dificuldade devido a partida do motor ser
realizada pela distorção de campo no entreferro.
- Número de polos múltiplos de 4;
Capacitor de
dois valores
- O grupo auxiliar pode ser utilizado para produção de
torque e forças radiais de posicionamento do rotor;
- Os elementos auxiliares de partida e o capacitor
permanente devem ser desconectados do motor.
Enrolado
Gaiola de
Esquilo
Repulsão
- Apresenta dificuldade devido à distorção do campo no
funcionamento do motor.
- Número de polos múltiplos de 4;
Convencional - Possibilidade de ligação em dupla estrela;
- Número de terminais acessíveis maior ou igual a 9.
- Número de polos múltiplo de 4
Trifásicos
Enrolado
Convencional
- Possibilidade de ligação em dupla estrela;
- Número de terminais acessíveis maior ou igual a 9.
- Fechamento do enrolamento rotórico em estrela.
Gaiola
de esquilo
- Número de polos múltiplo de 4;
Dahlander
- Desconexão da ligação Dahlander;
- Possibilidade de ligação em dupla estrela.
___________________________________________________________________________
60
___________________________________________________________________________
Capítulo 5 – Implementação do Sistema do Motor-Mancal
5.1. Introdução
Neste capítulo, será descrito o sistema mecatrônico que envolve o motor-mancal,
retificador, inversores de potência, sensores e interfaces de posição e corrente, interface dos
drives inversores e DSP. Todo o sistema de controle foi implementado utilizando o DSP
eZTMS 2812®. A Figura 5.1 apresenta o diagrama de blocos do sistema motor-mancal.
As interfaces e as adaptações necessárias para que o fluxo de informações eletroeletrônicas se transmitisse com exatidão e segurança entre os diversos componentes do
sistema são tomadas de (Souza Filho, 2011). No trabalho, as relações entre os sinais e as
funções de transferência de cada uma das interfaces, os diagramas eletrônicos e demais
detalhes podem ser obtidos.
Figura 5.1 – Diagrama de blocos do sistema motor-mancal de indução.
A corrente alternada, desde a Fonte até a alimentação das bobinas do estator é
transformada em corrente contínua no Conversor e novamente transformada em alternada no
Inversor de Frequência. A modulação da corrente nos Inversores de frequência, é realizada
através dos sinais vindos do sistema de controle no DSP. A corrente produzida é responsável
pela geração tanto do torque quanto das forças radiais de posicionamento do rotor.
___________________________________________________________________________
61
___________________________________________________________________________
O sistema completo, incluindo cada um dos elementos apresentados no diagrama de
blocos e demais componentes como interfaces, sensores e dispositivos de comandos, pode ser
observado na Figura 5.2.
Figura 5.2 – Sistema mecatrônico motor-mancal de indução.
5.2. O Motor-Mancal de Indução
O motor-mancal de indução utilizado neste trabalho é mostrado na Figura 5.3. Ele foi
construído a partir do motor de indução trifásico convencional com rotor em gaiola de
esquilo. Alguns dos principais parâmetros e características são apresentados na Tabela 5.1.
Alguns dos parâmetros foram obtidos através de ensaios realizados no laboratório e podem ser
vistos no Apêndice A.
___________________________________________________________________________
62
___________________________________________________________________________
Figura 5.3 – Motor-mancal de indução.
Tabela 5.1 – Parâmetros e características do motor.
Parâmetro
Potência nominal (kW)
Velocidade nominal (RPM)
Tensão nominal (V)
Corrente nominal (A)
Resistência do estator (Ω)
Resistência do rotor (Ω)
Indutância do estator (mH)
Indutância do rotor (mH)
Indutância de magnetização (H)
Momento de inércia (kg.m2)
Fator de espraiamento
Número de polos
Valor
3,70
1715
380
8,11
1,18
1,42
6,56
6,56
0,14
0,00995
0,10
4
O estator é trifásico com quatro polos, na configuração de polos consequentes. Cada
fase possui um grupo de bobinas que foi dividido ao meio para possibilitar o controle de
posição pelo modo diferencial de correntes. Cada meio grupo tem 3 bobinas ligadas em série;
todo o enrolamento é distribuído em 36 ranhuras situadas na periferia do estator. A Figura 5.4
mostra a distribuição do enrolamento no estator e a ligação do motor com as bobinas
divididas (dupla estrela).
A tensão nominal de alimentação de cada parte do grupo deve ser igual a 220 V. A
divisão do grupo de bobinas de cada uma das fases é necessária para que o controle de
posicionamento do rotor possa ser realizado pelo modo diferencial.
___________________________________________________________________________
63
___________________________________________________________________________
Figura 5.4 – Motor mancal de indução trifásico: (a) Distribuição do enrolamento no estator; (b)
Divisão do enrolamento para alimentação pelos inversores.
A alimentação do motor-mancal é realizada através de dois inversores de potência
trifásicos, montados com IGBT’s, que impõe as correntes em cada um meio grupo de bobinas,
Figura 5.8.
Na construção do motor-mancal, algumas alterações foram realizadas no motor de
indução. Mantendo a proposta de utilização do motor de indução convencional para a
construção de motores sem mancais mecânicos, o estator e rotor não sofreram qualquer
alteração. Modificações foram realizadas na tampa dianteira e traseira e no rolamento traseiro
As alterações foram realizadas com o objetivo de possibilitar a movimentação do eixo
com dois graus de liberdade nas direções radiais x e y na parte superior, sendo relacionadas a
seguir:
•
Aumento do diâmetro do furo da tampa dianteira em 0,50 mm;
•
Aumento do diâmetro do furo da tampa traseira em 0,50 mm;
•
Aumento do diâmetro do espaço de alojamento do rolamento dianteiro em 0,15 mm;
•
Substituição do rolamento traseiro por um de mesmo diâmetro autocompensado.
As duas primeiras alterações permitiram que o eixo oscilasse sem tocar as tampas
quando da operação do motor. O aumento do diâmetro da tampa dianteira no espaço do
alojamento do rolamento permitiu que o eixo se deslocasse radialmente operando como uma
máquina sem mancal mecânico.
___________________________________________________________________________
64
___________________________________________________________________________
O sistema de controle de posição realizado pelo DSP permitiu o funcionamento do
motor sem atrito. O rolamento dianteiro passou a funcionar como mancal de segurança para o
início do movimento do eixo e/ou na eventual falha do sistema de controle, visto que o
entreferro estator-rotor mede 0,20 mm sendo 0,05 mm menor que o entreferro rolamento
dianteiro (espaço entre o rolamento e a caixa de alojamento do mesmo).
A estrutura mecânica do motor com as partes mencionadas e as alterações realizadas
nas tampas conjuntamente com a instalação do rolamento autocompensado podem ser
observadas no esquema apresentado na Figura 5.5.
Figura 5.5 – Estrutura simplificada: (a) motor de indução; (b) motor-mancal radial; (c) motor-mancal
radial em operação.
Quando o motor é energizado, a parte superior do eixo que está livre passa a se
deslocar radialmente. Os sensores de posição fixados na tampa dianteira do motor, um na
direção x e o outro na direção y, medem a posição eixo. No caso do rotor estar
descentralizado, o controle digital realizado através do DSP recebe as informações da posição
e ajusta as correntes que alimentam cada meio grupo de bobinas, realizando o controle de
correntes por modo diferencial. Assim, as forças radiais são produzidas sobre o rotor para
centralização do eixo no estator.
___________________________________________________________________________
65
___________________________________________________________________________
A construção de motores-mancais radiais, utilizando-se motores de indução
convencionais, é bastante dificultada devido à precisão mecânica necessária na usinagem de
tampas e componentes necessários às medições de posição.
Quando lidamos com dimensões bastante diminutas, como as encontradas nos
entreferros dos motores de indução convencionais atuais, os erros relacionados às medições
de posição devem ser os mínimos possíveis de modo que o controle do posicionamento não
seja inviabilizado. Excentricidades no eixo devem ser minimizadas.
Os protótipos de motor-mancal podem ser construídos para operar com entreferros
maiores na faixa de 0,50 a 2,00 mm. As perdas devido ao aumento de entreferro podem ser
reduzidas se o motor operar a alta velocidade (Lähteenmäki, 2002). Os motores-mancais
construídos a partir de motores convencionais inevitavelmente operam com entreferros
menores e necessitam de um controle de posição mais acurado, visto que o range de
deslocamento radial do eixo é menor.
A princípio, como a variação radial possível para o motor-mancal utilizado era inferior
a 0,20 mm, optou-se por utilizar o mancal traseiro do próprio motor. A folga do rolamento
permitiria o deslocamento radial do eixo na parte superior.
No entanto, por causa da dificuldade para centralizar o eixo manualmente quando o
mesmo se encontrava parado optou-se pela substituição do rolamento convencional por um
autocompensador de esferas para permitir maior liberdade radial do eixo na tampa dianteira.
O rolamento autocompensador proporcionou maior facilidade de centralização do eixo
manualmente, também possível através do controle quando o motor está em operação.
Os testes, após a instalação do rolamento autocompensador mostraram que o eixo
passara a produzir várias órbitas quando deslocado perifericamente. Esse fenômeno, apesar de
estranho e indesejável quando se requer controlar a posição do eixo, é considerado normal
para esse tipo de rolamento. As várias órbitas são produzidas devido às folgas no sistema
rolamento-eixo-mancal (Matos, 1997).
A Figura 5.6 apresenta três órbitas possíveis projetadas ao se deslocar o eixo
perifericamente na caixa de alojamento do rolamento superior.
A projeção de várias órbitas, quando do deslocamento do rotor, dificultou o ajuste dos
ganhos do controlador de posição. As órbitas foram projetadas girando-se o eixo
manualmente e, depois, translacionando-o pela periferia do entreferro.
___________________________________________________________________________
66
___________________________________________________________________________
Figura 5.6 – Excentricidades do eixo do motor-mancal
mancal.
ência
5.3. Inversores de Frequência
Dois conjuntos de inversores trifásicos alimentam os seis grupos de bobinas do motormotor
mancal. O número de chaves é igual a 12,
12 permitindo que cada um dos grupos seja controlado
individualmente através de 6 sinais PWM no DSP. Sinais PWM,
PWM complementares dois a dois,
dois
intervalados por um tempo morto,
morto completam o chaveamento adequado de cada um dos
braços do IGBT. A Figura 5.7 apresenta os inversores instalados no Quadro
Quad de Comandos.
Figura 5.7 – Inversores trifásicos (IGBT’S).
O circuito dos inversores com as respectivas saídas de correntes de cada um dos
braços e as entradas de sinais PWM vindas da interface com o DSP,
DSP é apresentada na Figura
5.8.
___________________________________________________________________________
67
___________________________________________________________________________
Figura 5.8 – Diagrama dos inversores de potência do motor-mancal.
5.4. Interface DSP/IGBT’s
Os sinais PWM, com amplitudes 3,3 V, vindos do DSP, são amplificados para a faixa
de 13,0 a 15,0 Vcc, sendo os sinais enviados aos inversores em nível lógico alto igual a 12,0
Vcc. A Interface é apresentada na Figura 5.9.
Figura 5.9 – Interface DSP/IGBT’s.
___________________________________________________________________________
68
___________________________________________________________________________
Uma mostra de sinais PWM enviados aos drives IGBT’s é vista na Figura 5.10.
Figura 5.10 – Sinais PWM monitorados em uma das saídas da Interface de transmissão.
5.5. Conversor CA – CC
O conversor CA – CC é um retificador de onda completa, não controlado, alimentado
diretamente pela fonte trifásica para possibilitar o controle do nível da tensão na saída para os
inversores de potência, IGBT’s. O diagrama do retificador é apresentado na Figura 5.11.
Figura 5.11 – Diagrama do retificador de potência.
5.6. Interface / Sensores de Corrente
A interface de corrente é responsável pela conformação dos sinais de corrente, lidos
em cada metade de grupo das fases e enviados aos canais A/D do DSP. As correntes são
obtidas por seis sensores de efeito Hall, instalados um em cada saída para alimentação de cada
meio grupo de bobinas do motor.
___________________________________________________________________________
69
___________________________________________________________________________
A corrente, em cada sensor, é ajustada para a faixa de entrada de 0 a 3 A, com tensão
de saída variando de 0 a 5,0V. A interface de corrente faz a conformação do sinal para que a
tensão máxima na entrada do DSP seja igual ou inferior a 3,3 V.
A corrente nominal do motor vale 8,11 A, mas, como o enrolamento tinha as bobinas
ligadas em paralelo e foram divididas para ligação do motor-mancal, cada metade do grupo de
uma fase tem corrente nominal 4,055 A.
Os valores de corrente nominal são considerados para operação do motor à plena
carga. Como o motor-mancal não operará nessa condição, os sensores de efeito Hall foram
configurados para operação com corrente nominal igual a 3,0 A, com o objetivo de
proporcionar uma melhor resolução na leitura. O sensor utilizado nas interfaces foi o LTS – 6NP.
A curva de operação do sensor é apresentada na Figura 5.12. As interfaces de
correntes foram construídas em duas placas, nas quais estão três sensores de corrente, Figura
5.13.
A Figura 5.14 apresenta as correntes ia1, e ia2, frequência 20 Hz e as correntes ia1 e ia2,
frequência 60 Hz. Na Figura, as correntes ia1 e ia2 estão indicadas pelos canais 1 e 2
respectivamente.
Figura 5.12 – Curva de resposta do sensor LTS – 6-NP.
___________________________________________________________________________
70
___________________________________________________________________________
Figura 5.13 – Placa com as interfaces de corrente.
(a)
(b)
Figura 5.14 – Correntes ia1, e ia2: (a) f = 20 Hz; (b) f = 60 Hz.
5.7. Interface / Sensores de Posição
A posição do rotor em relação ao centro do estator é medida por dois sensores de
posição instalados nas direções x e y, respectivamente. Os sensores utilizam as correntes
parasitas sobre materiais condutores.
A leitura da posição é realizada para a superfície do disco de leitura da posição. O
disco de leitura é um cilindro de metal instalado na parte superior do eixo acima da tampa do
motor. Inicialmente, um rolamento convencional fora utilizado como alvo para o sensor de
posição, mas devido a ruídos na leitura o mesmo foi substituído.
Devido à qualidade da usinagem e/ou montagem do disco de leituras da posição no
eixo e também devido à substituição do rolamento traseiro convencional por um rolamento
autocompensador, diferenças de leituras muito acentuadas passaram a ser produzidas.
___________________________________________________________________________
71
___________________________________________________________________________
Com o objetivo de avaliar as diferenças de leituras, os sensores de posição foram
calibrados e o disco de medição foi marcado a cada 22.5o e foram tomadas leituras em cada
um dos sensores primeiro aproximando ao máximo o eixo e em seguida afastando-o ao
máximo. As Figuras 5.15 e 5.16 apresentam os gráficos com as medidas para cada ponto. As
leituras foram tomadas pelo canal A/D do DSP como valores digitais.
Algumas tentativas de correção das causas, que produziram as discrepâncias de
leituras de posição, foram realizadas, melhorando-se a qualidade da usinagem e montagem do
conjunto disco de medição – eixo. No entanto, não foram obtidos resultados satisfatórios.
Figura 5.15 – Medida de posição x e y, rotor mais próximo do estator.
Figura 5.16 – Medida de posição x e y, rotor mais distante do estator.
___________________________________________________________________________
72
___________________________________________________________________________
Para que fosse possível o controle de posição do eixo, foi utilizado o filtro da mediana
das posições para corrigir as diferenças nas leituras do sistema de posição.
No programa de controle no DSP, ao invés do sinal do controle de posição ser
atualizado a cada leitura, optou-se por atualizá-lo pela média das 16 últimas leituras. O
número de leituras para atualização do sinal de posição foi obtido por tentativa e erro,
observando-se o comportamento do controle de posição.
A curva de resposta do sensor para a distância é apresentada na Figura 5.17. De acordo
com o fabricante, para cada material se tem uma curva diferente.
Figura 5.17 – Curva de resposta do sensor de posição para o ferro e para o metal usado no disco de
medição.
A faixa de entrada é de 0 a 2 mm, com tensão de saída correspondente na faixa de –5 a
+5V. A conformação dos sinais de posição para os níveis de tensão dos canais de entrada
ADC do DSP é realizada pela interface de posição, nela os sinais são modificados para que
não sejam inferiores a 0,0 V e nem superiores a 3,3 V. A Figura 5.18 apresenta a interface de
posição. O diagrama do circuito da interface pode ser visto no Apêndice B.
___________________________________________________________________________
73
___________________________________________________________________________
Figura 5.18 – Interface de posição.
5.8. Descrição do Módulo eZdspTMF2812®
O módulo escolhido para o controle do sistema foi desenvolvido comercialmente pela
Spectrum Digital o eZdsp™F2812®, Figura 5.19. O módulo utiliza o processador digital de
sinais TMS3202812 de 32 bits da Texas Instruments, arquitetura de ponto fixo em hardware.
Figura 5.19 – Visão geral do módulo eZdsp™F2812.
Os elementos apresentados na Figura 5.19 são os seguintes: P1 – Interface JTAG; P2 –
Pinos de Expansão; P3 – Controlador de interface paralela Port/JTAG; P4/P8/P7 – Interface
de entrada e saída; P5/P9 – Interface analógica; e P6 – Fonte de Alimentação.
O processamento do algoritmo de controle do sistema motor-mancal de indução é
realizado no DSP através do code composer®. Para programação é utilizada a linguagem
ANSI C. No módulo, são utilizados o conversor Analógico/Digital, as saídas PWM e a
interface paralela. A visualização das variáveis é realizada pelas janelas watch window e
___________________________________________________________________________
74
___________________________________________________________________________
graphic view. As Figuras 5.20 e 5.21 apresentam o ambiente de programação e o sistema de
controle completo respectivamente.
Figura 5.20 – Interface de visualização e programação.
DSP TMS 2812
senθ
ia
ib
ic
cosθ
uX
uY
ua
ub
uc
ia*1 ia*2 ib*1 ib*2 ic*1 ic*2
uβ
uα
Figura 5.21 – Diagrama geral do sistema de controle do motor-mancal.
___________________________________________________________________________
75
___________________________________________________________________________
5.8.1. Etapas para realização do controle de posição
•
Geração da referência trifásica de corrente;
•
Cálculo do seno e cosseno para transformação rotacional de posição;
•
Leitura das posições x e y;
•
Cálculo das médias das leituras de posição x e y;
•
Cálculo dos sinais de erros para as posições x e y;
•
Cálculo da variação dos sinais de erro da ação derivativa do controlador PD;
•
Cálculo da ação proporcional do controlador PD;
•
Cálculo da ação derivativa do controlador PD;
•
Cálculo da lei de controle para as direções x e y;
•
Limitação do sinal de controle de posição nas direções x e y;
•
Transformação rotacional dos sinais de controle de posição x e y;
•
Transformação bifásica-trifásica dos sinais de controle de posição nas direções x e y;
•
Cálculo dos sinais de referência de corrente (corrente de torque + corrente de posição).
5.8.2. Etapas para realização do controle de corrente
•
Leitura dos seis sinais de corrente do estator;
•
Cálculo do erro dos sinais de corrente;
•
Cálculo da ação proporcional;
•
Cálculo da ação integrativa;
•
Limitação da ação integrativa;
•
Cálculo da lei de controle;
•
Limitação do sinal de controle;
5.8.3. Descrição do sistema de controle
O sistema de controle do motor-mancal se divide em duas etapas: o controle de
posição e o controle de corrente.
As correntes de referência de torque (ia, ib, e ic) são geradas pelo DSP, seguida da
geração dos sinais (sen e cos) para a transformação rotacional dos sinais de controle de
posição. Os conversores A/D recebem os sinais de posição (posX e posY) e os sinais de
corrente (ia1, ia2, ib1, ib2, ic1, e ic2), então os erros (erroX e erroY) e as variações dos erros
___________________________________________________________________________
76
___________________________________________________________________________
(veloX e veloY) dos sinais de posição são calculados para as referências (refx e refy). As leis
de controle para cada uma das direções x e y são calculadas; em seguida, através dos sinais de
transformação rotacional (sen e cos), os sinais de controle de posição são rotacionados,
seguido da transformação bifásico-trifásica. Após as transformações, os três sinais de corrente
de posicionamento (ua, ub e uc) são somados às correntes de referência de torque (ia, ib, e ic)
para gerar as referências de corrente, (ia1 = ia + ua, ia2 = ia – ua, ib1 = ib + ub, ib2 = ib – ub, ic1 = ic
+ uc, ic2 = ic – uc).
No controlador de corrente, é calculado o erro para cada uma das seis correntes do
estator em relação às referências de corrente (ia1, ia2, ib1, ib2, ic1, e ic2) obtidas do controlador
de posição. A ação integrativa é limitada e calcula-se a lei de controle (soma da ação
proporcional e integrativa) e por fim são produzidos os pulsos PWM para geração das
correntes senoidais que alimentam cada um dos seis meios-grupos de bobinas do estator
através dos IGBT’s.
As correntes, produzidas nas saídas do IGBT’s, são compostas de duas partes: a
componente referente à geração de torque e a componente referente à geração de forças
radiais. Quando o rotor tem a posição alterada em relação à referência, as componentes de
correntes produzidas pelo controlador de posição percorrem as bobinas do estator. A força
resultante produzida nos seis grupos de bobinas pela ação das componentes de corrente de
posição reposiciona o rotor.
Quando o rotor se encontra na referência, o motor-mancal opera como um motor de
indução convencional. As seis referências de corrente têm somente as parcelas referentes à
produção de torque.
Em cada par de grupos de bobinas diametralmente distribuído no estator (bobinas
instaladas em um mesmo eixo magnético, bobinas da mesma fase), as parcelas de corrente
somadas a um meio grupo é subtraída do outro, de forma que a corrente total, na fase,
permanece igual à corrente de referência de torque gerada inicialmente pelo DSP.
5.8.4. Considerações sobre os controladores do sistema
5.8.4.1. Controlador de posição
O modelo de posicionamento do rotor tem sido apresentado em vários trabalhos
(Salazar, 1993), (Ferreira, 2002), (Castro, 2004), como um modelo instável em malha aberta
por apresentar um polo no semiplano direito do plano R. Para tornar o sistema estável, um
controlador do tipo PD tem sido adotado, devido à função de transferência do mesmo incluir
___________________________________________________________________________
77
___________________________________________________________________________
um zero. O zero é posicionado de modo a atrair os ramos do lugar das raízes para o semiplano
esquerdo. A Figura 5.22 apresenta o lugar das raízes para o sistema em malha aberta e malha
fechada.
(a)
(b)
Figura 5.22 – Lugar das raízes: (a) sistema em malha aberta; (b) sistema em malha fechada.
Devido a não linearidade do sistema, a sintonia dos controladores se torna de difícil
obtenção.
Neste
trabalho,
os
parâmetros
dos
controladores
foram
determinados
empiricamente.
Equações do controlador:
•
•
•
•
Cálculo do erro:
erro(k) = ref(k) – x(k)
(5.1)
P(k) = Kp*erro(k)
(5.2)
D(k) = KD*[erro(k) – erro(k – 1)]
(5.3)
u(k) = P(k) + D(k)
(5.4)
Ação proporcional:
Ação derivativa:
Ação de controle:
Os controladores para posição de ambos os eixos têm a mesma estrutura.
Os sinais de posicionamento são rotacionados para obtenção de forças de atuação
radial invariantes no tempo (Chiba; Power; Rahman, 1991). A transformação realizada no
sistema de controle pode ser entendida acompanhando o texto a seguir e observando-se a
Figura 5.23.
As componentes de torque das correntes nas fases a, b e c são geradas pelo DSP como:
___________________________________________________________________________
78
___________________________________________________________________________
ia = I máx .sen (ω t + 0)
ib = I máx .sen (ω t + 2π / 3)
ic = I máx .sen (ω t − 2π / 3)
(5.5)
Figura 5.23 – Transformação do sinal de posição: (a) Transformação rotacional; (b) Transformação
bifásico – trifásica.
u x = uα cos (ω t ) + u β sen (ω t )
u y = −uα sen (ω t ) + u β cos (ω t )
(5.6)
Para a transformação bifásico-trifásico alinhando-se ux com a fase c, tem-se
ua = u x
u b = −u x sen (π / 6) + u y cos (π / 6)
= −0,500 u x + 0,867 u y
(5.7)
u c = −u x sen (π / 6) − u y cos (π / 6)
= −0,500 u x − 0,867 u y
___________________________________________________________________________
79
___________________________________________________________________________
onde:
uα e uβ são os sinais provenientes do sensor de posição;
ux e uy são os sinais de posição após a transformação rotacional para o sistema ortogonal;
ua, ub, e uc são os sinais de posição após a transformação para o sistema trifásico.
Os sinais ua,.ub e uc são adicionados ou subtraídos às correntes em cada meio grupo de
bobinas das fases a, b, e c, respectivamente, para controle das forças de restauração da
posição do rotor.
I a1 = I a + u a
I a 2 = I a − ua
I b1 = I b − u b
I b 2 = I b + ub
(5.8)
I c1 = I c − u c
I c 2 = I c + uc
5.8.4.2. Controlador de corrente
Os controladores de corrente serão do tipo PI. Este controlador foi escolhido devido a
sua simplicidade e por ter como característica eliminar erros em regime.
Equações do controlador:
•
Cálculo do erro:
erro(k) = ref(k) – x(k)
•
•
•
(5.9)
Ação proporcional:
P(k) = Kp*erro(k)
(5.10)
I(k) = I(k – 1)+ KI*erro(k)
(5.11)
u(k) = P(k) + I(k)
(5.12)
Ação integrativa:
Ação de controle:
Os controladores para as seis correntes têm a mesma estrutura.
___________________________________________________________________________
80
___________________________________________________________________________
5.8.4.3. Operação dos controladores em cascata
O sistema de controle implementado no DSP opera com os controladores de corrente e
posição em cascata. E pela estrutura do controle, o controlador de corrente deve ser mais
rápido que o controlador de posição.
A inobservância deste detalhe pode conduzir a dificuldades na escolha dos parâmetros
do controlador de corrente. O motor-mancal pode funcionar satisfatoriamente com um
controlador PI em condições de regime onde variações de corrente acentuadas não são
exigidas.
Na realização do controle de posição o desbalanceamento das correntes pode chegar,
para a condição mais crítica a 100%. Por exemplo, ia1 = 2ia e ia2 = 0. Nesta situação, o
controlador de corrente deve acompanhar a dinâmica do controlador de posição. Em outras
palavras, o controlador de corrente deve ser rápido o suficiente para permitir as variações de
corrente impostas pelo controlador de posição.
Pela razão exposta, devem-se buscar os parâmetros do controlador de corrente que
permitam o funcionamento do motor com magnitude de corrente adequada, sem considerar
influências do controle de posição, operação como motor de indução. No entanto, deve-se
avaliar o desempenho desse controlador após a inserção do controlador de posição no sistema,
operação como motor-mancal.
A solução para esse problema carrega um tanto de dificuldade, pois, a priori, os
parâmetros do controlador de posição não são conhecidos com a agravante de que o
desempenho do controle de posicionamento é dependente do controlador de corrente
escolhido.
A sintonia dos controladores torna-se mais trabalhosa quando se nota que os
parâmetros dos controladores são ótimos para um ponto de operação específico. Se o motor
operar em diferentes velocidades, a penosa tarefa de dupla sintonia de controladores deve ser
repetida para cada velocidade, sugerindo a utilização de controladores não clássicos ou de
métodos mais eficientes de sintonia. Neste trabalho, a sintonia de ambos os controladores foi
realizada empiricamente.
O motor-mancal foi colocado para operar como motor de indução com correntes de
frequência igual a 60 Hz e foram escolhidos vários controladores de corrente diferentes,
diferentes (Kp, Ki), alterando-se a referência de corrente para obter a região de operação linear
dos controladores. Esse processo foi repetido para valores de corrente dentro da faixa de
___________________________________________________________________________
81
___________________________________________________________________________
operação do motor de indução para cada um dos controladores. As curvas de operação são
apresentadas na Figura 5.24.
O ganho Ki de cada um dos controladores testados foi igual a Kp/5.
Resposta do Controlador de Corrente
3
Kp=3.125
Kp=6.250
Kp=9.375
Kp=12.5
2.5
ia1 (A)
2
1.5
1
0.5
0
0
0.5
1
1.5
ia1* (A)
2
2.5
3
Figura 5.24 – Resposta dos controladores de corrente.
As curvas dos controladores foram interrompidas no instante em que o motor de
indução passou a operar de maneira instável. A Figura 5.25 mostra as correntes ia1, ia2, ic1, e ic2
com o motor operando em ambas as regiões. O controlador utilizado foi Kp 9.375. As
correntes foram deformadas.
Observando-se a Figura 5.24 nota-se uma diminuição no nível de corrente após a
referência de corrente ia1*, 1,5 A. Isso acontece devido ao motor ter iniciado o movimento do
rotor. A diminuição da força contra eletromotriz produz uma maior corrente para uma mesma
referência imposta no DSP. Se os parâmetros do controlador permanecem os mesmos, o
controlador entrará na região de instabilidade e o motor de indução não funcionará
adequadamente. No caso do motor-mancal, não haverá como controlar a posição do eixo.
___________________________________________________________________________
82
___________________________________________________________________________
Figura 5.25 – Corrente Ia1, Ia2 , Ic1 e Ic2: (a) controladores na região estável; (b) controladores na
região instável.
Os ganhos dos controladores deverão ser ajustados para que o motor vença a inércia e
inicie o movimento de rotação do eixo até que o mesmo atinja a velocidade nominal de
rotação para a frequência ajustada e depois deve ser reajustados para que o motor permaneça
em operação.
Se, em baixas rotações, o controlador de posição tiver desempenho insatisfatório, o
sistema deve possuir mancal de segurança.
Os controladores de corrente devem atuar na região linear com velocidade satisfatória,
para que as variações de corrente, ocasionadas pelo controle de posição, possam ser
correspondidas. Assim, para operação do motor-mancal na frequência de 60 Hz, dos quatro
controladores testados, escolheu-se o controlador (Kp; Ki) = (3,125; 0,625) por ter uma faixa
maior de operação na região estável. Esse procedimento foi repetido para as frequências de
20, 30 e 75 Hz.
5.9. Conclusões
Este capítulo apresentou os componentes necessários para que o sistema motor-mancal
pudesse operar corretamente e para que se pudesse coletar e apresentar dados das grandezas
do sistema.
Na implementação e testes de cada um dos componentes, foram observadas algumas
condições indesejáveis e alguns problemas para os quais se procurou encontrar soluções para
que o motor-mancal pudesse operar conforme pretendido. É o caso dos controladores de
posição e corrente e também das discrepâncias de leituras nas posições dos eixos x e y.
___________________________________________________________________________
83
___________________________________________________________________________
A eficácia dos componentes em separadamente e no conjunto do sistema motormancal já fora provada no trabalho realizado por (Sousa Filho, 2011), sendo aqui comprovada
na operação do motor-mancal em diferentes condições de funcionamento.
___________________________________________________________________________
84
___________________________________________________________________________
Capítulo 6 – Resultados Experimentais
6.1. Introdução
O sistema constituído do motor-mancal de indução radial do tipo enrolamento
dividido, controlado através do DSP, conjuntamente com cada uma das interfaces e demais
componentes necessários ao funcionamento, foi testado para obtenção dos resultados
experimentais.
Este capítulo mostra a operação do sistema motor-mancal e das partes envolvidas com
o conjunto de resultados suficientes para validar a proposta deste trabalho.
O motor utilizado foi apresentado na Tabela 5.1. As razões que levaram a escolha
deste motor foram: o motor trifásico permite um melhor controle de posição por apresentar
um maior número de fases; número de polos igual a quatro, devido ser o menor número
possível para máquinas do tipo enrolamento dividido; formação de polos consequentes no
estator por ser necessário um menor número de braços de inversor para alimentar cada uma
das metades do grupo do motor; número de terminais do motor acessíveis igual a 12;
possibilidade de ligação em dupla estrela; alta disponibilidade do mesmo no mercado.
6.2. Controladores de Correntes
Os controladores de corrente foram testados inicialmente na operação de um motor de
indução convencional idêntico ao motor utilizado para construção do motor-mancal. O
segundo passo foi testar os controladores que funcionaram adequadamente em conjunto com
os controladores de posição.
Escolhido um controlador, o motor foi alimentado iniciando-se com corrente de
amplitude igual a zero, aumentando-se com passos de 5% até 100% da corrente de referência.
A cada alteração se observava o padrão de funcionamento do motor com relação à velocidade
e ausência de pulsação de torque (estabilidade).
Os controladores de corrente, cujos desempenhos consideraram-se satisfatórios, foram
testados para variações mais amplas com passos de até 50%, tanto acima quanto abaixo da
corrente de referência na tentativa de observar se os mesmos responderiam às variações de
corrente impostas pelo controle de posição quando da operação do motor-mancal.
A Figura 6.1 apresenta a corrente de referência, ia1*, e a corrente da bobina a1, ia1, para
operação do motor na frequência 60 Hz. Nota-se que a corrente sensoriada acompanha a
___________________________________________________________________________
85
___________________________________________________________________________
referência senoidal de corrente. Na Figura, VDSP é o valor digital da variável escolhida para
plotagem no gráfico de visualização do DSP (graphic view).
Escala vertical: 5 mA/VDSP
Escala horizontal: 0.25 ms/VDSP
Figura 6.1 – Corrente de referência e corrente da bobina a1 para o motor operando com frequência 60
Hz.
Após este teste, a rotina do controle de posição foi adicionada ao sistema de controle,
através do ambiente de programação code composer®, para verificar se o controlador de
corrente atenderia às variações de corrente, agora imposta pela mudança de posição do eixo.
Para facilitar o trabalho, visto que a dinâmica da posição é muito rápida quando o
motor-mancal está operando, usou-se como estratégia alimentar o motor de indução pelos
inversores trifásicos e instalar os sensores de posição no motor-mancal.
Assim, movendo-se radialmente o rotor do motor-mancal, as variações de posição
produzidas manualmente alteravam as amplitudes das correntes que alimentavam o motor de
indução. O desempenho do controlador de corrente foi observado enquanto se variava a
posição do rotor.
Esta estratégia possibilitou não somente observar o desempenho do controlador de
corrente para uma dada posição do eixo, mas também observar visualmente a perturbação do
torque pela influência de variações de posição muito intensas como antecipado no cálculo das
forças magnetomotrizes para motores trifásicos visto no capítulo 4.
A Figura 6.2 apresenta as correntes ia1, ia2, e a posição para o rotor alinhado com o
eixo x nas proximidades da bobina a1. As bobinas a1 e a2 têm o eixo magnético alinhado
com o eixo x conforme pode ser visto no capítulo 4. O círculo projetado, na Figura, foi obtido
escolhendo-se a órbita mais regular daquelas possíveis e seguindo os procedimentos indicados
na seção 5.2.
___________________________________________________________________________
86
___________________________________________________________________________
Escala vertical: 0.4 A/div.
Escalas: 0.04 mm/div.
(b)
(a)
Figura 6.2 – Operação do motor, correntes de f = 30 Hz: (a) Posição do rotor;
rotor (b) Corrente ia1 e ia2.
Os ganhos dos controladores de corrente para operação
operação do motor-mancal
motor
em quatro
diferentes frequências
ências das correntes são apresentados na Tabela 6.1. Os parâmetros do
controlador são alterados no algoritmo de controle através do ambiente code
c
composer®.
Para o funcionamento do motor-mancal
motor
inicialmente foram fixados os ganhos dos
controladores e a frequência
ência das correntes que alimentaram
alimenta
o motor conforme a Tabela 4.1.
Depois, a amplitude das correntes foi alterada gradualmente para evitar picos de corrente
durante a partida. Esse procedimento foi repetido
repetido para operação em cada uma das frequências.
freq
Tabela 6.1 – Parâmetros do controlador PI.
Frequência
Parâmetro
(Hz)
Kp
Ki
20
4,375
1,250
30
9,375
1,975
60
3,125
0,625
75
3,125
1,250
6.3. Controlador de Posição Radial
O motor foi acionado com sucesso após vários ajustes nos parâmetros dos
controladores. Os passos para operação são indicados a seguir:
seguir
•
Traçar, na tela do osciloscópio os sinais de posição x e y, projetando-se
projetando
o círculo a
partir da varredura do rotor ao longo da periferia do limite mecânico
mecânic do rolamento de
segurança na tampa dianteira do motor, Figura 6.3;
___________________________________________________________________________
87
___________________________________________________________________________
•
Centralizar o rotor manualmente e ajustar as referências de posição x e y no algoritmo
de controle;
•
Ligar o motor-mancal
mancal e ajustar a corrente para que o motor inicie o movimento rotor
até atingir a velocidade nominal para a frequência
freq
de operação;
•
Reajustar a corrente para que o motor continue operando de forma estável após o
mesmo atingir a velocidade nominal;
•
Observar as alterações no deslocamento do rotor e ajustar os parâmetros do
controlador
rolador de posição.
Figura 6.3 – Limite de deslocamento radial do rotor.
Durante os experimentos, o motor-mancal
motor
foi colocado em operação e se aplicou uma
força externa para que a posição do rotor fosse modificada para o extremo direito do eixo x,
proximidade da bobina a1.. Neste instante, foram coletadas as correntes que alimentam dois
grupos de bobinas, um na fase a e o outro na fase c.
Observou-se
se que as correntes para as duas metades dos grupos de cada uma das fases
estavam defasadas de 180o, conformee pode ser visto na Figura 6.4. Isto ocorreu devido à
amplitude da corrente de desbalanceamento (ua, e uc) ser superior à amplitude da corrente de
referência de torque (ia, e ic).
No caso da fase a,, por exemplo, ia1 = ia + ua, a parcela ua, quando negativa,
negativa é superior
a ia. Como já observado, esta condição não contribui para produção de forças radiais para
posicionamento do rotor.
Para evitar essa condição,
condição foi inserida, no programa de controle,
controle uma rotina para
limitação da ação do controle de posicionamento.
posicionamento. A amplitude da corrente de
desbalanceamento, referente à posição,
posição será no máximo igual à amplitude da corrente de
referência de torque.
___________________________________________________________________________
88
___________________________________________________________________________
Escala vertical: 0.80 A/div.
Figura 6.4 – Correntes ia1, ia2, ic1 e ic2 – operação do motor-mancal sem limitação do sinal de posição.
Com a inserção de limitadores para ação do controle de posição, as correntes para os
grupos de bobinas da fase a e c, para a mesma condição de teste, são semelhantes às
apresentadas na Figura 6.2.
6.3.1. Resultados da operação do motor-mancal
Nesta seção são apresentadas as regiões de posicionamento, os gráficos de posição nos
eixos x e y e as correntes de duas fases para a operação do motor-mancal, realizados nas
frequências listadas na Tabela 6.1. Estas frequências correspondem às velocidades síncronas
600, 900, 1800 e 2250 RPM.
Nos resultados, se pode observar que o motor-mancal, construído a partir do motor de
indução trifásico, operou com sucesso após ajustes dos controladores de corrente e posição.
Os ganhos dos controladores de posição para operação do motor-mancal em quatro
diferentes frequências são apresentados na Tabela 6.2.
Os procedimentos para operação do motor-mancal em cada uma das frequências foram
os seguintes:
•
Traçar, na tela do osciloscópio, os sinais x e y, projetando-se o círculo de
posição;
•
Centralizar o rotor manualmente e ajustar as referências de posição x e y no
algoritmo de controle;
•
Ajustar a frequência de operação para as correntes de alimentação do motormancal;
___________________________________________________________________________
89
___________________________________________________________________________
•
Ajustar os parâmetros do controlador de corrente para a frequência de operação
desejada;
•
Ajustar a amplitude da corrente de alimentação do motor-mancal para zero;
•
Aumentar gradativamente a amplitude da corrente de alimentação do motormancal até o rotor atingir a velocidade nominal para a frequência de operação
escolhida;
•
Reajustar a corrente de alimentação do motor para que o motor continue
operando de forma estável após o mesmo atingir a velocidade nominal;
•
Ajustar os parâmetros do controlador de posição até que o posicionamento do
rotor seja aceitável;
•
Coletar dados de posição, dispersão da posição e correntes de alimentação dos
grupos de bobinas do motor.
Tabela 6.2 – Parâmetros do controlador PD.
Frequência
Parâmetro
(Hz)
Kp
Kd
20
0.234
18.750
30
0.234
14.063
60
0.156
11.719
75
0.352
14.063
6.3.1.1. Operação motor-mancal – 60 Hz
O controlador de posição mantém o eixo centralizado, apresentando uma pequena
região de dispersão. A região de dispersão do eixo e a variação de posição nos eixos x e y
podem ser observadas na Figura 6.5. As correntes nas bobinas a1, a2, c1 e c2 podem ser
visualizadas na Figura 6.6.
A região de dispersão foi obtida com o osciloscópio na posição de persistência
determinando os locais pelos quais o rotor se deslocou durante o experimento. A linha mais
nítida representa os últimos deslocamentos do eixo.
Na região de dispersão, observa-se que não há pontos da trajetória do rotor que
coincidam com a órbita delineada manualmente. Isso se deve a duas razões: em primeiro,
como o motor-mancal opera na vertical, o eixo não obrigatoriamente repousa sobre a órbita na
parte inferior movido pela força peso; a segunda é o fato do controle de posição ter sido
___________________________________________________________________________
90
___________________________________________________________________________
acionado somente depois que a máquina atingiu a velocidade nominal de operação para a
frequência escolhida.
motor
desde a velocidade zero até a velocidade nominal
No funcionamento do motor-mancal,
de operação, o mancal de segurança impede que o rotor colida com o estator. Quando o motor
atinge a velocidade nominal,
nominal o controle de posição é ajustado para que o eixo seja
centralizado no estator.
Escala vertical: 0.16
0. mm/div.
(b)
Escalas: 0.04 mm/div.
(a)
Figura 6.5 – Operação do motor-mancal,
motor
f = 60 Hz: (a) Região de dispersão; (b) Posição eixos x e y.
Escala vertical: 0.71 A/div.
Figura 6.6 – Operação do motor-mancal,
motor
f = 60 Hz, correntes ia1, ia2, ic1 e ic2.
O cálculo da mediana e do desvio padrão para as leituras coletadas pelos sensores de
posição foi realizado utilizando a ferramenta computacional Matlab® sendo apresentado na
Tabela 6.3. Os dados para cálculo das medidas foram coletados durante 2,0 s.
___________________________________________________________________________
91
___________________________________________________________________________
Tabela 6.3
6. – Mediana e Desvio Padrão,, f = 60 Hz.
Hz
Frequência
ência
Mediana (mm)
Desvio Padrão (mm)
(Hz)
Pos X
Pos Y
Pos X
Pos Y
60
0.0160
0.0060
0.0477
0.0259
259
A mediana representa
representa a medida de tendência central das medidas coletadas pelos
sensores, enquanto o desvio padrão denota a dispersão das medidas.
As medianas das leituras para ambos os eixos se aproximam bastante de zero, sendo
um pouco maior para o eixo x. Ajustes de parâmetros
tros diferentes para os controladores de
posição do eixo x e do eixo y podem reduzir a diferença entre ambas as medianas e um melhor
desempenho de ambos os controladores deve aproximar ainda mais região de dispersão do
caso ideal, como apresentado para o motor
m
de indução.
Os resultados da operação do motor de indução convencional foram registrados a
título de comparação. As Figuras 6.7 e 6.8 mostram a posição e correntes. O comportamento
da posição serve como condição ideal de operação do sistema motor-manc
motor mancal com o controle
de posição funcionando otimamente.
No motor de indução,
indução a posição radial do rotor é fixada pelo mancal,
mancal sendo
desnecessáriaa a operação dos
d controladores de posição. As informações de posição do eixo
foram coletadas para plotagem. A região de dispersão do eixo e a variação de posição,
posição nos
eixos x e y, podem ser observadas na Figura 6.7. As correntes nas bobinas a1, a2, c1 e c2
podem ser visualizadas na Figura 6.8.
Escala vertical: 0.16
0. mm/div.
(b)
Escalas: 0.04 mm/div.
(a)
Figura 6.7 – Operação do motor de indução, f = 60 Hz: (a) Região de dispersão;
dispersão (b) Posição eixos x e
y.
___________________________________________________________________________
92
___________________________________________________________________________
Escala vertical: 0.71 A/div.
Figura 6.8 – Operação do motor de indução, f = 60 Hz, correntes ia1, ia2, ic1 e ic2.
A variação da posição para o motor de indução, como era de se esperar para uma
máquina que possui mancal mecânico, é praticamente inexistente, Figura 6.7. As correntes se
apresentam equilibradas, como é o caso para grupo de bobinas idênticos.
6.3.1.2. Operação motor-mancal – 75 Hz
Com o objetivo de avaliar o comportamento do controlador de posição para velocidade
superior à nominal, o motor-mancal foi alimentado com correntes de frequência igual a 75
Hz.
Comparada à dispersão observada na operação do motor-mancal alimentado com
correntes de frequência nominal, observa-se um pequeno alargamento da região na qual o
rotor se desloca quando se deveria observar um estreitamento desta região.
As forças radiais de posicionamento do rotor aumentam com o aumento da frequência
das correntes que alimentam os grupos de bobinas como pode ser visto em (2.3). No entanto,
o posicionamento do rotor depende não somente da intensidade das forças produzidas, mas
também, e em grande parte, do desempenho do sistema de controle do motor-mancal. Razão
pela qual o posicionamento do rotor foi um pouco melhor para frequência nominal do motor.
___________________________________________________________________________
93
___________________________________________________________________________
Escala vertical: 0.16
0. mm/div.
(b)
Escalas: 0.04 mm/div.
(a)
Figura 6.9 – Operação do motor-mancal,
motor
f = 75 Hz: (a) Região de dispersão; (b) Posição eixos x e y.
Escala vertical: 0.71 A/div.
Figura 6.10 – Operação do motor-mancal,
motor
f = 75 Hz, correntes ia1, ia2, ic1 e ic2.
As variações das correntes dos grupos de bobinas são mais acentuadas indicando
maior atuação do controle de posição.
p
A mediana e o desvio padrão para a posição do rotor foram calculados e são
apresentados na Tabela 6.4. O mesmo procedimento é também utilizado para operação do
motor-mancal
mancal nas demais frequências.
freq
Tabela 6.4
6. – Mediana e Desvio Padrão,, f = 75 Hz.
Hz
Frequência
ência
Mediana (mm)
Desvio Padrão (mm)
(Hz)
Pos X
Pos Y
Pos X
Pos Y
75
0.0180
0.0560
0.0291
0.0324
As medianas das leituras para ambos os eixos ainda são menores que a metade da
medida do entreferro do motor, porém, apresentam valores superiores aos observados para a
___________________________________________________________________________
94
___________________________________________________________________________
operação do motor quando alimentado com corrente de frequência
freq ência igual a 60 Hz. A dispersão
dos dados é mais equilibrada para as duas direções.
6.3.1.3. Operação motor-mancal
mancal – 30 Hz
Para avaliar o comportamento do controlador de posição para velocidade inferior à
frequência nominal, o motor-mancal
motor mancal foi alimentado com correntes de frequência
freq
igual a 30
Hz.
Com a redução da frequência,
frequência notou-se a ampliação da região de dispersão da posição
para o motor-mancal.
mancal. No experimento,
experimento evidencia-se a dificuldade de conseguir otimizar o
desempenho dos controladores de posição.
Escala vertical: 0.16
0. mm/div.
(b)
Escalas: 0.04 mm/div.
(a)
Figura 6.11 – Operação do motor-mancal,
motor
f = 30 Hz: (a) Região de dispersão;; (b) Posição eixos x e y.
Escala vertical: 0.71 A/div.
Figura 6.12 – Operação do motor-mancal,
motor
f = 30 Hz, correntes ia1, ia2, ic1 e ic2.
ência de operação 30 Hz, a mediana e o desvio padrão foram calculados e
Para a frequência
apresentados na Tabela 6.5.
___________________________________________________________________________
95
___________________________________________________________________________
Tabela
ela 6.5
6. – Mediana e Desvio Padrão,, f = 30 Hz.
Hz
Frequência
ência
Mediana (mm)
Desvio Padrão (mm)
(Hz)
Pos X
Pos Y
Pos X
Pos Y
30
0.0580
0.0821
0.0421
0.0546
As medianas das leituras,
leituras para ambos os eixos, são próximas da metade da medida do
entreferro do motor. O aumento da região de dispersão evidencia maior dificuldade de
controle de posicionamento do eixo possivelmente devido a redução da frequência
freq
de
operação. O desvio padrão das medidas também é mais acentuado que para frequência
freq
próximas à nominal.
As variações
iações de corrente para os grupos de bobinas são pequenas indicando a
possibilidade de melhoria no desempenho do controlador de posição.
6.3.1.4. Operação motor-mancal
mancal – 20 Hz
A operação do motor-mancal
motor
em frequência muito baixas é bastante dificultada. A
grande região de dispersão da posição apresentada na Figura 6.13(a) indica também a
dificuldade de parametrização dos controladores de posição.
Escalas: 0.04 mm/div.
(a)
Escala vertical: 0.16
0. mm/div.
(b)
Figura 6.13 – Operação do motor-mancal,
mo
f = 20 Hz: (a) Região de dispersão;; (b) Posição eixos x e y.
___________________________________________________________________________
96
___________________________________________________________________________
Escala vertical: 0.71 A/div.
Figura 6.14 – Operação do motor-mancal, f = 20 Hz, correntes ia1, ia2, ic1 e ic2.
A redução da frequência para as correntes que alimentam o motor-mancal pode
inviabilizar a operação como motor-mancal se a mesma estratégia de controle for utilizada.
A mediana e o desvio padrão foram calculados e são apresentados na Tabela 6.6.
Tabela 6.6 – Mediana e Desvio Padrão, f = 20 Hz.
Frequência
Mediana (mm)
Desvio Padrão (mm)
(Hz)
Pos X
Pos Y
Pos X
Pos Y
20
0.0900
0.0720
0.0459
0.0405
As medianas das leituras, para ambos os eixos, aproximam-se da metade da medida do
entreferro do motor. A grande região de dispersão para operação nesta frequência indica a
limitação de aplicação do motor para velocidades de rotação mais baixas com a estratégia de
posição para o modelo utilizado.
As correntes, que alimentam cada um dos grupos de bobinas, variam mais que aquelas
observadas para a frequência de 30 Hz.
6.4. Conclusões
Os resultados experimentais comprovam a viabilidade do uso de motores de indução
convencionais para aplicação motores-mancais. A operação em velocidades próxima e acima
da velocidade nominal da máquina projeta melhor desempenho. Não somente por causa de
maior estabilidade da posição, mas também pela menor interferência no torque da máquina.
___________________________________________________________________________
97
___________________________________________________________________________
Os aspectos ainda não ótimos na operação do motor-mancal, não inviabilizam a
proposta deste trabalho como pretendido. A operação em baixas velocidades ainda apresenta
dificuldades; a dispersão da posição do eixo torna-se tanto mais acentuada quanto menor for a
velocidade do eixo.
Algumas razões são apontadas para a dispersão do deslocamento do rotor:
•
A excentricidade observada para o conjunto disco-eixo;
•
Desempenho dos controladores ainda possíveis de melhorias;
•
Utilização de um modelo linearizado considerando que a planta é não linear do ponto
de vista mecânico e magnético;
A continuidade das pesquisas com a máquina utilizada neste trabalho é sugerida nas
perspectivas de trabalhos futuros.
___________________________________________________________________________
98
___________________________________________________________________________
Capítulo 7 – Conclusões Finais e Perspectivas Futuras
7.1. Conclusões Finais
O objetivo deste trabalho foi o estudo da viabilidade de utilização de máquinas de
indução convencionais como motores sem mancais mecânicos. Para a consecução desta
proposta várias etapas foram realizadas: desenvolvimento de interfaces, programa de controle
em um DSP, aplicação de modelos já testados em protótipos de máquinas sem mancais,
escolha de um motor de indução convencional para operação, testes e validação da proposta.
O motor de indução trifásico convencional foi escolhido de acordo com as
características apresentadas neste trabalho e os testes finais validaram a proposta: motores de
indução convencionais são úteis para a aplicação de motores sem mancais mecânicos.
Com a implementação do sistema motor-mancal de indução do tipo enrolamento
dividido e pela análise dos resultados obtidos foram possíveis algumas conclusões:
•
Os controladores clássicos, PI e PD, já utilizados em trabalhos anteriores, são úteis ao
controle de corrente e posição, respectivamente;
•
A sintonia dos controladores de corrente e posição é de difícil obtenção por método de
tentativa e erro, como realizado neste trabalho, sendo aconselhado o uso de técnicas
e/ou controles inteligentes;
•
Existe um compromisso muito forte entre a escolha dos controladores de corrente e
posição;
•
O controle de posição para baixas rotações ainda não foi possível com a estratégia de
controle utilizada, devendo-se fazer uso de mancal de segurança durante a partida do
motor;
•
As imprecisões advindas do processo de usinagem e substituição de rolamento do
motor são críticas para o funcionamento do controle de posição quando se opera com
entreferros muito pequenos como é o caso nos motores de indução convencionais;
•
As forças de posicionamento do rotor, possivelmente também, mas não unicamente
devido ao controle, ainda são muito pequenas;
•
As forças de posicionamento do rotor ainda são pequenas, possivelmente devido ao
funcionamento ainda não ótimo do controle de posição;
•
O motor funciona satisfatoriamente para velocidade maior ou igual a 600 RPM sendo
tanto melhor quanto maior for a velocidade de operação;
___________________________________________________________________________
99
___________________________________________________________________________
7.2. Perspectivas de Trabalhos Futuros
As perspectivas futuras notadamente devem conter soluções que contribuam para a
melhoria do que foi realizado após a conclusão deste trabalho além de outras como segue:
•
Implementação de um método de sintonia de controladores utilizando estratégias
inteligentes;
•
Implementação de controle robusto para o sistema de controle do motor-mancal;
•
Melhorar a precisão dos processos mecânicos para transformação dos motores
convencionais em motores-mancais;
•
Implementar controladores não clássicos para verificar a possibilidade de operação do
motor em baixas rotações;
•
Implementar o controle de velocidade em conjunto com o controle de posição,
utilizando controle vetorial para obtenção de respostas melhores em regime e
transitório;
•
Implementar o motor-mancal de indução com a técnica sensorless para a posição;
•
Implementar o motor-mancal de indução utilizando um motor de indução com rotor
bobinado;
•
Estudar a viabilidade de operação de máquinas hexafásicas para melhorar o nível de
forças de Maxwell;
•
Estudo e implementação com o motor-mancal de indução objeto deste trabalho
operando na vertical com 4 graus de liberdade;
•
Estudo do sistema com o motor-mancal objeto deste trabalho com o motor operando
na horizontal;
Conclui-se que o objetivo proposto foi alcançado e que este trabalho servirá para a
continuidade de pesquisas futuras com os motores-mancais de indução utilizando motores de
indução convencionais.
___________________________________________________________________________
100
___________________________________________________________________________
Apêndice A
Determinação dos Parâmetros do Motor de Indução
Os parâmetros foram determinados após medições e cálculos de algumas grandezas. Para
realizar as medições foram inseridos no circuito que alimenta o motor um amperímetro, um
voltímetro e dois wattímetros para que a corrente, tensão e potência fossem medidas. As
resistências das bobinas foram medidas utilizando-se um multímetro na função de resistência.
•
•
•
•
O motor foi conectado em Y;
Os valores das grandezas medidas são médios e foram observados em três ensaios;
Os valores de resistência foram calculados à temperatura 75o C;
Os ensaios são baseados em [Simone, 2008]
MOTOR:
POTÊNCIA: 3,7 KW
TENSÃO DE ALIMENTAÇÃO Y: 380 V
CORRENTE NOMINAL Y: 8,11 A
TEMPERATURA AMBIENTE: 28º C
1. ENSAIOS - Máquina de Indução
a) Ensaio em Vazio
VRN
(V)
225,90
VSN
(V)
220,47
VTN
(V)
222,30
IR
(A)
4,061
IS
(A)
4,132
IT
(A)
4,157
WR
(W)
80,07
WS
(W)
76,00
IS
(A)
8,29
IT
(A)
8,12
WR
WS
(W)
(W)
164,67 179,33
WT
(W)
71,30
b) Ensaio com rotor bloqueado
VRN
(V)
46,60
VSN
(V)
47,47
VTN
(V)
46,47
IR
(A)
8,01
WT
(W)
172,00
c) Ensaio de tensão DC
VDCR
(mV)
112,2
VDCS
(mV)
116,0
VDCT
(mV)
119,6
IDCR
(mA)
111,4
IDCS
(mA)
115,4
IDCT
(mA)
119,8
d) Medição de resistência das bobinas do estator
Bobinas 1- 4
(Ω)
1,0
Bobinas 2 - 5
(Ω)
1,0
Bobinas 3 - 6
(Ω)
1,0
___________________________________________________________________________
101
___________________________________________________________________________
Parâmetros da Máquina de Indução
R(28 o ) =
0,170
0,171
R(28 o ) = 0,998Ω
R(75 o ) = 0,998.1,179
R(75 o ) = 1,176Ω
R(75 o ) = RF = R1 = 1,18Ω
i.
Determinação da potência dissipada no ferro do estator da máquina
3.( I F ) 2 = ( I FR ) 2 + ( I FS ) 2 + ( I FT ) 2
= ( 4,1) 2 + ( 4,1) 2 + ( 4,2) 2
I F = 4,13 A
A potência total é dada por:
PT (lida ) = PFerro do Estator + PCobre do Estator
P1 + P2 + P3 = PFerro do Estator + 3.R1 .( I F ) 2
80,7 + 76,0 + 71,3 = PFerro do Estator + 3.(1,18).( 4,13) 2
228,0 = PFerro do Estator + 60,4
PFerro do Estator = 167,6 W
ii.
Determinação da potência entregue ao ramo magnetizante da máquina
3.(VFN ) 2 = (VRN ) 2 + (VSN ) 2 + (VTN ) 2
3.(VFN ) 2 = (225,9) 2 + (220,5) 2 + (222,3) 2
VFN = 222,91 V
A potência aparente disponibilizada pela rede é:
S = 3.V F .I F
= 3 . 222,91 . 4,13
= 2761,87 VA
cos φ =
P
S
= 0,083
senφ = 0,99
___________________________________________________________________________
102
___________________________________________________________________________
A potência indutiva será:
QMag = S .senφ
= 2743,05 VAr
iii.
Determinação da reatância de magnetização da máquina de indução trifásica no
modelo por fase
V F = X Mag . I Mag
QMag / Fase = V F . I Mag
QMag / Fase
VF 2
=
X Mag / Fase
VF 2
X Mag / Fase =
QMag / Fase
222,912
=
2743,05 / 3
X Mag / Fase = 53,34 Ω
X Mag = 2 . π . f . LMag
LMag / Fase = 0,14 H
iv.
Determinação da resistência equivalente às perdas no ferro do pacote do estator
V F 2
R FE =
PFE
222,912
=
167,6 / 3
= 891,02 Ω
222,91
891,02
= 0,25 A
IP =
222,91
53,34
= 4,18 A
I Mag =
A corrente de excitação será dada por:
___________________________________________________________________________
103
___________________________________________________________________________
2
I 01 = I P2 + I Mag
= 4,18 2 + 0,25 2
= 4,19 A
v.
Determinação das perdas do enrolamento do rotor
3.( I F ) 2 = ( I FR ) 2 + ( I FS ) 2 + ( I FT ) 2
= (8,0) 2 + (8,3) 2 + (8,1) 2
I F = 8,13 A
A potência aparente:
S = 3.VF .I F
= 3. 46,9. 8,13
= 1143,89 VA
A potência ativa:
PLida = 164,7 + 179,3 + 172,0
= 517 W
R1 = 1,18 Ω
PCU Estator = 3. R1 . I F
2
= 3. 1,18. 8,13 2
= 233,98 W
A potência ativa do rotor:
PCU Rotor = PLida − PCU Estator
= 516,00 − 233,98
= 282,02 W
PCU Rotor = 3. R2 . I F
'
2
282,02
3. 8,13 2
= 1,42 Ω
R2 =
'
vi.
Determinação das reatâncias de dispersão para o modelo por fase
___________________________________________________________________________
104
___________________________________________________________________________
S = 1143,89 VA
P = 516,00 W
QMag Rotor Bloqueado =
2
V FN
X Mag
46,9 2
=
53,34
= 41,24 VAr
O ensaio de rotor bloqueado envolveu a potência reativa de:
Q Rotor Bloqueado = 1143,89 2 − 516,00 2
= 1020,90 VAr
Q Dispersão Rotor Bloqueado = Q Rotor Bloqueado − Q MagnetizaçãoRotor Bloqueado
= 1020,90 − 41,24
= 979,66 VAr
A reatância de dispersão global da máquina por fase é calculada como:
QDispersão Rotor Bloqueado = 3. X Rotor Bloqueado . I F
X Rotor Bloqueado =
QDispersão Rotor Bloqueado
3. I F
= 40,17 Ω
Considerando que o motor é da categoria N, teremos que a reatância de dispersão do
estator e rotor são idênticas.
QDispersão Rotor Bloqueado = 3. X Rotor Bloqueado . I F
X d1 = X d 2 =
'
X Rotor Bloqueado
2
= 20,09 Ω
vii.
RF = R1
1,18 Ω
OS PARÂMETROS DA MÁQUINA SÃO:
R’R = R’2
1,43 Ω
RFE
891,02 Ω
XMag
53,4 Ω
XF = Xd1
20,09 Ω
X’R = X’d2
20,09 Ω
A Figura A.1 apresenta o circuito equivalente da máquina utilizada.
___________________________________________________________________________
105
___________________________________________________________________________
Figura A.1 – Circuito equivalente do motor de indução trifásico.
RESUMO DOS PARÂMETROS
Tabela A.1 – Parâmetros da Máquina de indução sem mancais.
Pnominal Potência Nominal
Vnominal Tensão Nominal
Velocidade Nominal
Inominal Corrente Nominal
RS Resistência de Estator por fase
RR Resistência de Rotor por fase
LdS Indutância de dispersão do estator por fase
LdR Indutância de dispersão do rotor por fase
Lm Indutância de magnetização
LS Indutância do estator por fase
LR Indutância do Rotor por fase
np Número de Par de Polos
J Momento de Inércia
σ Fator de Dispersão
3,7 kW
380 V
1715 RPM
8,11 A
1,18 Ω
1,43 Ω
53,32 mH
53,32 mH
141,56 mH
265,66 mH
265,66 mH
2
9,95.10-3 kg.m2
0,5
___________________________________________________________________________
106
___________________________________________________________________________
Apêndice B
Diagramas de Circuitos das Interfaces
B1. Circuito das Interfaces de Corrente
B2. Circuito das Interfaces de Posição
B3. Circuito das Interfaces DSP/IGBT’s
___________________________________________________________________________
107
___________________________________________________________________________
Apêndice C
/*****************************************************************
Programa de controle do motor-mancal
******************************************************************/
#include "sgen.h"
#include "DSP281x_Device.h" // DSP281x Headerfile Include File
#include "DSP281x_Examples.h" // DSP281x Examples Include File
// Prototype statements for functions found within this file.
interrupt void timer_isr (void);
void inicializa(void);
void desabilita_PWM(void);
void habilita_PWM(void);
//void Gpio_select(void);
//Criando função para o BUFF:
void BUF(void);
// ADC start parameters
#define ADC_MODCLK 0x3
// HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 =
150/(2*3)
= 25MHz
#define ADC_CKPS
0x1
// ADC module clock = HSPCLK/2*ADC_CKPS
=
25MHz/(1*2) = 12.5MHz
#define ADC_SHCLK 0xf // S/H width in ADC module periods
/******************** Controle de corrente ***********************/
// alteramos o PWM_MAX para aumentarmos o ganho da corrente sgen3.gain
#define PWM_MAX 1250 /* 1500: ciclo de trabalho igual a 100% */
/* 1500 ==> 13,33
kHz */
#define PWM_50 625 //900 /* 750: ciclo de trabalho igual a 50% */
/* 750 ==> 75 us */
/* Deslocamentos de ciclo de trabalho para os braços inversores */
int DES = 1250;
int OFFSET = 507;
/******* Parâmetros do sensor de velocidade *******/
#define per_tmr2 65535 /* período do Timer 2 */
#define per_tmr3 1250 /* período do Timer 3 */
#define BIT_ON (GpioDataRegs.GPBSET.bit.GPIOB13=1)
#define BIT_OFF (GpioDataRegs.GPBCLEAR.bit.GPIOB13=1)
/******* Variáveis de controle de corrente **********/
___________________________________________________________________________
108
___________________________________________________________________________
int offset[6], ref[6], erro[6], ui[6], Ia = 0, Ib = 0, Ic = 0, sen, cos, k = 1, cont = 0, controle[6];
int corrente0=0, corrente1=0, corrente2=0, corrente3=0, corrente4=0, corrente5=0;
/******* Variáveis de controle de posição ***********/
int refx = 450, refy = 500,
posX, posY, erroX=0, erroY=0,
erroX_ant=0, erroY_ant=0,
prop=0, deriv=0,
velo_x=0, velo_y=0,
u_x=0, u_y=0, u_al = 0, u_be = 0,
u_a = 0, u_b = 0, u_c = 0, tmp, x_ant=0, y_ant=0,
iX=0, iY=0, u_al_ant=0, u_be_ant=0, erro_ant=0, aux=16, u_a0=0, u_a1;
int tinic=0;
//#########################################################
//Ganho dos controladores de corrente
int GPC = 25;
int GIC = 5;
/****** Controle de posição ao longo dos eixos X e Y *******/
int GP = 25; /* (9 / 128) ganho proporcional de posição */
int GD = 750; /* (50 / 64) ganho derivativo de posição */
/*Ganhos dos Controladores do PID - Posição X */
//int GPX = 50; /* ganho proporcional de posição */
//int GDX = 0; /* ganho derivativo de posição */
//int GIX = 0; /* ganho integrativo de posição */
//int P1 = 0; /* ganho de polo negativo estabilizador */
/*Ganhos dos Controladores do PID - Posição Y */
//int GPY = 50; /* ganho proporcional de posição */
//int GDY = 0; /* ganho derivativo de posição */
//int GIY
= 0; /* ganho integrativo de posição */
long int MPI = 25;
long int MC = 1250;
int c1 = 29;
int c2 = 35;
int FREQ_NOMINAL = 1610;
int DES_ADC = 50;
// - Buffer para plotagem de algumas variaveis no graphview ---- //
___________________________________________________________________________
109
___________________________________________________________________________
long int BUF1[256], BUF2[256],BUF3[256],BUF4[256];
// ----------------- Contadores ------------------------- //
unsigned int escolha=0, escolha1=0, i=0, d=0, d_end=2;
unsigned int Inversor=2;
int ganho = 0;
/*################ Fim das declarações ###############*/
/* Início das funções */
SGENT_3 sgen3 = SGENT_3_DEFAULTS;
void init_sgen3 (void){
/* Inicializa gerador de senóides (frequências, fases, etc.) */
sgen3.freq = 8192;//1610;//FREQ_NOMINAL;
/* freq = f * 2^15 / freq_max ; 5461 ==>
60 Hz */
sgen3.step_max = 2150;
freq_max = step_max * Fs / 2^16 = 360,03 ; Fs = 1 / (5 * 75 * 10^-6) */
sgen3.alpha = 0x0000;
/* 0x4000 = 90° */
sgen3.offset = 0;
sgen3.gain = 0;
}
void desabilita_PWM (void){
EvaRegs.ACTRA.all = 0x0FFF;
EvbRegs.ACTRB.all = 0x0FFF;
}
void habilita_PWM (void){
EvaRegs.ACTRA.all = 0x0666;
EvbRegs.ACTRB.all = 0x0666;
}
/***************************************************************************
*/
/*
ROTINA PRINCIPAL
*/
/***************************************************************************
*/
void main(void) {
//
int i, j, tmp;
___________________________________________________________________________
110
___________________________________________________________________________
InitSysCtrl();
//#########################################################
/* ------ Variação da Frequência de Chaveamento--------SysCtrlRegs.HISPCP.all = 0x0000; -> 60 khz
SysCtrlRegs.HISPCP.all = 0x0001; -> 30 khz
SysCtrlRegs.HISPCP.all = 0x0002; -> 15 khz
SysCtrlRegs.HISPCP.all = 0x0003; -> 10 khz
SysCtrlRegs.HISPCP.all = 0x0004; -> 7 khz
SysCtrlRegs.HISPCP.all = 0x0005; -> 6 khz
SysCtrlRegs.HISPCP.all = 0x0006; -> 5 khz
SysCtrlRegs.HISPCP.all = 0x0007; -> 4 khz
*/
//#########################################################
InitGpio(); // Skipped for this example
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW;
PieVectTable.T1UFINT = &timer_isr;
EDIS;
EALLOW;
GpioMuxRegs.GPAMUX.all = 0x013F;
GpioMuxRegs.GPADIR.all = 0x007F;
GpioMuxRegs.GPBMUX.all = 0x007F;
GpioMuxRegs.GPBDIR.all = 0x013F;
GpioMuxRegs.GPDMUX.all = 0x0000;
GpioMuxRegs.GPDDIR.all = 0x0010;
GpioMuxRegs.GPEMUX.all = 0x0000;
GpioMuxRegs.GPEDIR.all = 0x0000;
GpioMuxRegs.GPFMUX.all = 0x0000;
GpioMuxRegs.GPFDIR.all = 0x0000;
GpioMuxRegs.GPGMUX.all = 0x0000;
GpioMuxRegs.GPGDIR.all = 0x0000;
EDIS;
InitAdc();
___________________________________________________________________________
111
___________________________________________________________________________
// Specific ADC setup for this example:
AdcRegs.ADCTRL1.bit.ACQ_PS = ADC_SHCLK;
AdcRegs.ADCTRL3.bit.ADCCLKPS = ADC_CKPS;
AdcRegs.ADCTRL1.bit.SEQ_CASC = 1;
AdcRegs.ADCTRL1.bit.CONT_RUN = 1;
/* ----------------- Gerenciadores de eventos -------------------- */
/* Configuração do Timer 2 - Utilizado para medir velocidade */
EvaRegs.T2CNT = 0x0000; /* limpa contador do timer 2 */
EvaRegs.T2PR = per_tmr2; /* define período de contagem */
EvaRegs.T2CON.all = 0x1740; /* inicia contagem */
// prescaler 111 = 128 para medir velocidade 4.77Hz
/* Configuração Timer 1 */
EvaRegs.GPTCONA.all = 0x0000;
EvbRegs.GPTCONB.all = 0x0041;
EvaRegs.T1PR = 2500; //PWM_MAX;
EvaRegs.T1CON.all = 0x0840;
/* Configuração Timer 3 */
EvbRegs.T3CNT = 0x0000;
EvbRegs.T3PR = 2500;
EvbRegs.T3CON.all = 0x0840;
/* Configuração dos PWM's" */
EvaRegs.DBTCONA.all = 0x0000;
EvbRegs.DBTCONB.all = 0x0000;
EvaRegs.ACTRA.all = 0x0999;
EvbRegs.ACTRB.all = 0x0999;
EvaRegs.COMCONA.all = 0x8200;
EvbRegs.COMCONB.all = 0x8200;
/* Configura interrupções do EVA */
EvaRegs.EVAIFRA.all = 0xFFFF;
EvaRegs.EVAIFRB.all = 0xFFFF;
EvaRegs.EVAIFRC.all = 0xFFFF;
EvaRegs.EVAIMRA.all = 0x0200;
EvaRegs.EVAIMRB.all = 0x0000;
EvaRegs.EVAIMRC.all = 0x0000;
/* Configura interrupções do EVB */
EvbRegs.EVBIFRA.all = 0xFFFF;
EvbRegs.EVBIFRB.all = 0xFFFF;
EvbRegs.EVBIFRC.all = 0xFFFF;
EvbRegs.EVBIMRA.all = 0x0000;
EvbRegs.EVBIMRB.all = 0x0000;
EvbRegs.EVBIMRC.all = 0x0000;
___________________________________________________________________________
112
___________________________________________________________________________
/* Configuração da unidade de captura */
EvaRegs.CAPFIFOA.all = 0x0000;
EvaRegs.CAPCONA.all = 0x2040;
EvaRegs.CAPCONA.all = 0xA040;
/* Gerador de referência trifásica */
init_sgen3 ();
/* inicializa senoides */
sgen3.calc (&sgen3); /* calcula valores dos senos */
/* Inicializa memória dos integradores */
ui[0] = 0;
ui[1] = 0;
ui[2] = 0;
ui[3] = 0;
ui[4] = 0;
ui[5] = 0;
// Step 5. User specific code, enable interrupts:
// Enable PIE group 2 interrupt 6 for T1UFINT
PieCtrlRegs.PIEIER2.all = M_INT6;
// Enable CPU INT2 for T1UFINT
IER |= (M_INT2);
// Enable global Interrupts and higher priority real-time debug events:
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
for(;;);
} // fim do void main()
/******* INTERRUPT SERVICE ROUTINES **************/
/* Interrupção gerada pelo timer 1 */
interrupt void timer_isr (void){
//int i, j, temp;
/***Atualização das Correntes Trifásicas Senoidais de Referência**/
sgen3.calc (&sgen3);
/* Correntes nominais trifásicas */
Ia = (sgen3.out1);
Ib = (sgen3.out2);
/* sgen.out1 = fase A */
/* sgen.out3 = fase B */
___________________________________________________________________________
113
___________________________________________________________________________
Ic = (sgen3.out3);
/* sgen.out2 = fase C */
/* Cálculo de sen(t) e cos(t) */
sen = sgen3.out1;
cos = ((sgen3.out2 - sgen3.out3) * 74) >> 7;
//#########################################################
/* Prepara para a aquisição das correntes */
AdcRegs.ADCMAXCONV.all = 0x0007;
AdcRegs.ADCCHSELSEQ1.all = 0x3210;
AdcRegs.ADCCHSELSEQ2.all = 0x7654;
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1;
AdcRegs.ADCTRL2.bit.SOC_SEQ1 = 1;
while (AdcRegs.ADCST.bit.INT_SEQ1== 0);
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1;
/* Leitura das Correntes*/
corrente0 = (AdcRegs.ADCRESULT0 >> 6);
corrente1 = (AdcRegs.ADCRESULT1 >> 6);
corrente2 = (AdcRegs.ADCRESULT2 >> 6);
corrente3 = (AdcRegs.ADCRESULT3 >> 6);
corrente4 = (AdcRegs.ADCRESULT4 >> 6);
corrente5 = (AdcRegs.ADCRESULT5 >> 6);
u_a1 = u_a0*(corrente0 - OFFSET);
u_a1 = u_a1 >> 4;
/* Leitura das Posições */
posX = 0;
for(tinic=0; tinic<aux; tinic++)
posX = posX +(AdcRegs.ADCRESULT6 >> 6);
posX = posX/aux;
posY = 0;
for(tinic=0; tinic<aux; tinic++)
posY = posY +(AdcRegs.ADCRESULT7 >> 6);
posY = posY/aux;
/************************ Controle de posição radial **************************/
/***Leitura da posição no Eixo X e cálculo de Erro de Posição ***/
___________________________________________________________________________
114
___________________________________________________________________________
erroX = -(refx - posX);
/****Leitura da posição no Eixo Y e cálculo de Erro de Posição ****/
erroY = -(refy - posY);
/********Cálculo da Variação dos Erros nas Direções X e Y *******/
velo_x = (erroX - erroX_ant);
velo_y = (erroY - erroY_ant);
/* limite para o sinal acumulativo do integrador */
erroX_ant = erroX;
erroY_ant = erroY;
/*************** Controle de posição radial no Eixo X**************/
/* Cálculo do controle PD */
prop = (GP * erroX) >> 7;
deriv = ((GD * velo_x) >> 6);
/* Lei de controle X */
u_al = prop + deriv;
//Atualização:
//
erro_ant = erroX;
//
u_al_ant = u_al;
/*************** Controle de posição radial no Eixo Y**************/
/* Cálculo do controle PD */
prop = (GP * erroY) >> 7;
deriv = ((GD * velo_y) >> 6);
/* Lei de controle Y */
u_be = prop + deriv;
// Atualização:
//
erroY_ant = erroY;
//
u_be_ant = u_be;
/****************Transformações para a força radial***************/
/* T1: rotacional */
u_x = ((sen * u_al) >> 7) + ((cos * u_be) >> 7);
___________________________________________________________________________
115
___________________________________________________________________________
u_y = -((cos * u_al) >> 7) + ((sen * u_be) >> 7);
/* T2: mudança de bifásico para trifásico */
u_a = u_x;
u_b = -(u_x >> 1) + ((u_y*111)>>7);
u_c = -(u_x >> 1) - ((u_y*111)>>7);
if (u_a > sgen3.gain)
u_a = sgen3.gain;
else
if (u_a < -sgen3.gain)
u_a = -sgen3.gain;
if (u_b > sgen3.gain)
u_b = sgen3.gain;
else
if (u_b < -sgen3.gain)
u_b = -sgen3.gain;
if (u_c > sgen3.gain)
u_c = sgen3.gain;
else
if (u_c < -sgen3.gain)
u_c = -sgen3.gain;
// Algoritmo de controle de posição : PID digital
/* Calcula os sinais de referência */
ref[0] = Ia + u_a + OFFSET;
ref[1] = Ia - u_a + OFFSET;
ref[2] = Ib - u_b + OFFSET;
ref[3] = Ib + u_b + OFFSET;
ref[4] = Ic - u_c + OFFSET;
ref[5] = Ic + u_c + OFFSET;
if (Inversor == 1)
{
// Conversor Ligado
/* Algoritmo de controle: PI digital */
erro[0] = ref[0] - corrente0;
ui[0] += ((GIC * erro[0]) >> 3);
if (ui[0] > MPI)
ui[0] = MPI;
else
if (ui[0] < -MPI)
ui[0] = -MPI;
controle[0] = ((GPC * erro[0]) >> 3) + ui[0] + DES;
___________________________________________________________________________
116
___________________________________________________________________________
EvaRegs.CMPR1 = (controle[0] < 0) ? 0 : controle[0];
erro[1] = ref[1] - corrente1;
ui[1] += ((GIC * erro[1]) >> 3);
if (ui[1] < -MPI)
ui[1] = -MPI;
else
if (ui[1] > MPI)
ui[1] = MPI;
controle[1] = ((GPC * erro[1]) >> 3) + ui[1] + DES;
EvaRegs.CMPR2 = (controle[1] < 0) ? 0 : controle[1];
erro[2] = ref[2] - corrente2;
ui[2] += ((GIC * erro[2]) >> 3);
if (ui[2] > MPI)
ui[2] = MPI;
else
if (ui[2] < -MPI)
ui[2] = -MPI;
controle[2] = ((GPC * erro[2]) >> 3) + ui[2] + DES;
EvaRegs.CMPR3 = (controle[2] < 0) ? 0 : controle[2];
erro[3] = ref[3] - corrente3;
ui[3] += ((GIC * erro[3]) >> 3);
if (ui[3] < -MPI)
ui[3] = -MPI;
else
if (ui[3] > MPI)
ui[3] = MPI;
controle[3] = ((GPC * erro[3]) >> 3) + ui[3] + DES;
EvbRegs.CMPR4 = (controle[3] < 0) ? 0 : controle[3];
erro[4] = ref[4] - corrente4;
ui[4] += ((GIC * erro[4]) >> 3);
if (ui[4] > MPI)
ui[4] = MPI;
else
if (ui[4] < -MPI)
ui[4] = -MPI;
controle[4] = ((GPC * erro[4]) >> 3) + ui[4] + DES;
EvbRegs.CMPR5 = (controle[4] < 0) ? 0 : controle[4];
erro[5] = ref[5] - corrente5;
ui[5] += ((GIC * erro[5]) >> 3);
if (ui[5] < -MPI)
ui[5] = -MPI;
___________________________________________________________________________
117
___________________________________________________________________________
else
if (ui[5] > MPI)
ui[5] = MPI;
controle[5] = ((GPC * erro[5]) >> 3) + ui[5] + DES;
GpioDataRegs.GPBSET.bit.GPIOB8 = ref[5];
EvbRegs.CMPR6 = (controle[5] < 0) ? 0 : controle[5];
}
else if (Inversor == 2) // Conversor Desligado
{
EvaRegs.CMPR1 = 0;
EvaRegs.CMPR2 = 0;
EvaRegs.CMPR3 = 0;
EvbRegs.CMPR4 = 0;
EvbRegs.CMPR5 = 0;
EvbRegs.CMPR6 = 0;
}
BUF();
EvaRegs.EVAIFRA.bit.T1UFINT = 1; /* limpa bit correspondente à interrupção do
timer */
// Acknowledge interrupt to receive more interrupts from PIE group 2
PieCtrlRegs.PIEACK.all = PIEACK_GROUP2;
}
/*<><><><><><><>BUF<><><><><><><><><><><><>*/
void BUF(void)
{
//------- Armazena duas variaveis para serem plotadas -----//
if (d >= d_end)
{
switch(escolha)
{
case 0:
BUF1[i] = ref[0] - OFFSET;
BUF2[i] = u_a1;
BUF3[i] = controle[0];
BUF4[i] = erro[5];
___________________________________________________________________________
118
___________________________________________________________________________
break;
case 1:
BUF1[i] = refx;
BUF2[i] = posX;
BUF3[i] = u_al;
BUF4[i] = u_be;
break;
default:
escolha = 0;
break;
}
i++;
if(i==256)
i=0;
d=0;
//GpioDataRegs.GPFDAT.bit.GPIOF8 ^= 1;
}
d++;
}
___________________________________________________________________________
119
___________________________________________________________________________
Apêndice D
Trabalhos Publicados em Congressos e/ou Revistas
1. 10o Congresso Brasileiro de Eletrônica de Potência – Setembro 2009
Performance Analysis Of A Neural Flux Observer For A Bearingless Induction Machine With
Divided Windings. Authors: Valcí Ferreira Victor, José Álvaro De Paiva, Andrés Ortiz
Salazar, André Laurindo Maitelii.
2. Revista de Eletrônica de Potência – Maio 2010
Performance Analysis Of A Neural Flux Observer For A Bearingless Induction
Machine With Divided Windings. Autores: J. A. Paiva, V. F. Victor, O. S.
Andres, A. L. Maitelli
3. ISMB 13 – The International Symposium on Magnetic Bearings
Analysis and Study of a Bearingless AC Motor type Divided Winding, Based on a
Conventional Squirrel Cage Induction Motor. Autores: Valcí F. Victor, Luciano P. Dos S.
Junior, José S. B. Lopes, and Andres O. Salazar
4. Intermag 2012 – IEEE International Magnetics Conference
Analysis and Study of a Gearless AC Motor type Divided Winding, Based on a Conventional
Squirrel Cage Induction Motor. Autores: V.F. Valci, F.O. Quintaes, A.S. Lock, A.O. Salazar,
J.A Diaz-Amado and J.S. Lopes
5. Magnetics IEEE Transactions on – Nov. 2012, Volume 48, Issue 11, page(s) 3571 – 3574
Journal & Magazines
Analysis and Study of a Bearingless AC Motor Type Divided Winding, Based on a
Conventional Squirrel Cage Induction Motor. Victor, V.F, Quintais F.O., Lopes J.S.B, Júnior
L. D. S., Lock, A. S., Salazar A.O.
___________________________________________________________________________
120
___________________________________________________________________________
Referências Bibliográficas
(Bessa, 1997)
Bessa, M. F.; “Cálculo de Forças em Mancais Magnéticos Através do
Mapeamento de Campo Por Elementos Finitos”, Dissertação de
Mestrado, PGMEC-UFF, Niterói, Julho 1997.
(Bosch, 1988)
Bosch, R., “Development of a bearingless electric motor”, ICEM, pp.
373-375, 1988.
(Cardozo, 2003)
Cardoso N. N., “Controle Simultâneo da Velocidade e Posição em
Mancais Motores Magnéticos”, Dissertacão de Mestrado, COPPE,
UFRJ, Rio de Janeiro, 2003.
(Castro, 2004)
Castro, F. E. F., “Motor de indução trifásico sem mancais com
bobinado dividido: otimização do sistema de posicionamento radial”,
Dissertação de mestrado, PPgEE – UFRN, Natal, 2004.
(Chiba, 1990)
Chiba A. , A.,Chida, K., Fukao, T., “Principle and characteristics of
a reluctance motor with windings of magnetic bearing”, IPEC, pp.
919-926, Japan, April, 1990.
(Chiba, 1991)
Chiba A., Power D. T., Rahman M. A., "Characteristics of a
bearingless induction motor", IEEE Trans. On Mag, pp 5199-5201,
Sep, 1991.
(Chiba, 1994)
“Characteristics of a permanent magnet Type bearigless motor",
IEEE IAS A.M., Vol. 2, pp 196-202, Denver 1994.
(Chiba, 1996)
Chiba, A., Miyatake, R., Hara, S., Fukao, T., “Transfer
Characteristics of Radial Force of Induction-Type Bearingless
Motors with Four-Pole Rotor Circuits”, The 5th International
Symposium on Magnetic Bearing, pp.175-181, Kanazawa, Japan,
August, 1996.
(Chiba, 1998)
Chiba, A., Fukao. T., “Optimal design of rotor circuits in induction
type bearingless motors”, IEEE Transactions on Magnetics, Vol. 34,
Nº 4, 1998.
(Chiba, 2005)
Chiba, A., Fukao. T. Ichikawa O., Oshima M., Takemoto M. and
Dorrell D. G., “Magnetic Bearings and Bearingless Drives”, IEEE
Transactions on Magnetics, Vol. 34,
Nº 4, 1998.
(David, 2000)
David, D. B. F., “Levitação de Rotor por Mancais-Motores Radiais
Magnéticos e Mancal Axial Supercondutor Auto-Estável”, Tese de
Doutorado COPPE, UFRJ, Rio de Janeiro, Dezembro 2000.
___________________________________________________________________________
121
___________________________________________________________________________
(Ferreira, 2002)
Ferreira, J. M. S., “Proposta de máquinas de indução trifásica sem
mancal com bobinado dividido”, Dissertação de mestrado, Programa
de Pós-Graduação em Engenharia Elétrica - UFRN, Natal-RN, Brasil,
2002.
(Ferreira, 2006)
Ferreira, J. M. S., “Modelagem de máquina de indução trifásica sem
mancais com bobinado dividido”, Tese de Doutorado, Programa de
Pós-Graduação em Engenharia Elétrica - UFRN, Natal-RN, Brasil,
2006.
(Fitzgerald, 2003)
A.E. Fitzgerald, C. Kingsley Jr., S.D. Umans, Electric Machinery, Ed.
McGraw-Hill Science. USA/ 6th ed., 2003.
(Gomes, 2007)
Gomes R. R., “Motor Mancal com Controle Implementado em DSP”,
Dissertacão de Mestrado, COPPE, UFRJ, Rio de Janeiro, 2007.
(Hermann, 1973)
Hermann, P.K., “A radial active magnetic bearing”, London Patent
Nº 1 478 868, November 20, 1973.
(Hermann, 1974)
Hermann, P.K., “A radial active magnetic bearing having a rotating
drive”, London Patent Nº 1 500 809, February 09, 1974.
(Ichkawa, 1999)
O. Ichikawa, A. Chiba, T. Fukao, "Development of Homo-Polar type
bearingless motors", IEEE, IAS Annual Meeting Conference Record,
pp. 1223-1228, Oct. 1999.
(Kauss, 2008)
Kauss, Wilmar L, “Motor Mancal Magnético com Controle Ótimo
Implementado em um DSP”, Dissertação de Mestrado, UFRJ, 2008.
(Lähteenmäki,
Lähteenmäki, J. K., “Design and Voltage Supply of High-Speed
Induction Machines”, Acta Polytechica Scandiavica, Electrical
Engineering Series No 108, Espoo, Filand. 140 p.
2002)
(Leonhard, 2001)
Leonhard, W., “Control of electrical drives”, Springer-Verlag, Third
Edition, Berlin Heidelberg New York, Germany, 2001.
(Masuazawa, 2000) Masuzawa T., Kita T., Ezoe S., Ueno S., Okada Y., “Application of
the combined motor-bearing to artificial hearts”, IPEC, pp. 21202125, Japan, Apr. 2000.
(Matos, 1997)
Matos, C. S., Rocha, R. D., Matos, W. S., Zindeluk, M., “Estudo de
Efeitos Dinâmicos Induzidos por Folga em Mancais de Rolamento em
um Rotor Vertical”, 12º Congresso Brasileiro de Manutenção –
ABRAMAN, 1997.
(Paiva, 2007)
Paiva, José Álvaro. "Controle vetorial de velocidade de uma máquina
de indução sem mancais trifásica com bobinado dividido utilizando
estimação neural de fluxo", Tese Doutoral, UFRN – Natal, RN, 2007.
___________________________________________________________________________
122
___________________________________________________________________________
(Preston, 1994)
M. A. Preston, J.P.F Lyons, E. Richter and K. Chung, "Integrated
Magnetic Bearing/Switched Reluctance Machine", United States
Patent, No 5 424 595, 22, Dec. 1994.
(Rodriguez, 2011)
Rodriguez, Elkin Ferney ; Santisteban, J. A., An Improved Control
System for a Split Winding Bearingless Induction Motor. IEEE
Transactions on Industrial Electronics (1982. Print) JCR, v. 58, p.
3401-3408, 2011.
(Salazar, 1990)
Salazar, A. O., “Mancais Magnéticos para Motores de Indução
Utilizando os Próprios Enrolamentos do Estator”, Dissertação de
Mestrado, COPPE, UFRJ, Rio de Janeiro, 1989.
(Salazar, 1993)
Salazar, A. O., Stephan, R. M., “A bearingless method for induction
machine”, IEEE Transations On Magnetics, Vol. 29, Nº 6, pp. 29652967, November, 1993.
(Salazar, 1994)
Salazar, A. O., “Estudo de Motor CA com Mancal Magnético
Utilizando os Próprios Enrolamentos do Estator”, Tese de
Doutorado COPPE, UFRJ, Rio de Janeiro, Março 1994.
(Santisteban, 1999)
Santisteban, J. A., “Estudo da Influencia da Carga Torsional sobre o
Posicionamento Radial de um Motor-Mancal”, Tese de Doutorado –
Programa de Engenharia Elétrica / UFRJ– Rio De Janeiro/RJ, Brasil,
1999.
(Santisteban, 2001)
Santisteban, J. A., Stephan, R. M., “Vector Control Methods for
Induction Machines: An Overview”, IEEE Transactions on
Education, Vol. 44, Nº 2, pp. 170-175, May, 2001
(Schob, 1998)
Schob R., Barletta.N., “Principle and application of a bearingless
slice motor”, V ISMB, pp. 333-338, Kanazawa, Japan 1996.
(Sousa Filho, 2011) João Coelho de Sousa Filho, Sensores e Interfaces com Aplicações
em Motor Mancal, Dissertação de Mestrado, UFRN, Natal, RN, 73 p.
(Ueno, 2000)
Ueno S., Kanebako H., Yamane T., Okada Y., “Single-axis controlled
combined motor-bearing system using repulsion tipe permanent
magnet”, IPEC,PP. 371-376, Japan, Apr. 3-7 2000.
(Weg, 2005)
CURSO CTC - Centro de Treinamento de Clientes, Weg Indústrias
S.A, CD versão 1.2
(Weg, 2010)
“Rotor bobinado com sistema motorizado de levantamento das
escovas”. www.weg.net, Folden Ref 60201/012010.
___________________________________________________________________________
Download