Fábio Pereira
Microcontroladores
RL78
Guia Básico
1ª Edição
Versão 1.01
Joinville - SC
Edição do Autor
2013
Microcontroladores RL78: Guia Básico
1
Copyright © 2013 Fábio Pereira
Todos os direitos reservados.
É proibida a redistribuição, de forma parcial, do conteúdo deste livro ou arquivo eletrônico.
A utilização parcial do material desta obra é condicionada a sua citação como fonte do
conteúdo.
Todas as marcas registradas, nomes ou direitos de uso citados neste livro pertencem aos seus respectivos
proprietários.
O autor acredita que todas as informações apresentadas nesta obra estão corretas e podem ser utilizadas para
qualquer fim legal. Entretanto, não existe qualquer garantia implícita ou explícita, de que o uso de tais informações
conduzirá sempre ao resultado esperado.
Acesse: www.perse.com.br para adquirir cópias impressas adicionais.
Material para download disponível em:
www.sctec.com.br/blog
ISBN: 978-85-8196-334-1
2
Microcontroladores RL78: Guia Básico
Agradecimentos
Este é o meu nono livro e ele não teria sido possível sem a colaboração de algumas
pessoas, por isso, os meus agradecimentos a:
- André Machado de Oliveira, da Renesas do Brasil, pela amizade e incentivo (há
anos) na utilização dos microcontroladores Renesas, além do suporte, ajuda na
revisão do texto, sugestões, kits e apoio incondicional ao livro.
- Huéliquis Fernandes, da Renesas do Brasil, pela amizade e grande apoio dado à
viabilização deste livro e também por acreditar no meu trabalho.
- Felipe Torrezan e Leonardo Carlos Afonso, da Renesas do Brasil, pelo apoio
técnico, ajuda na revisão e suporte ao livro.
- William Severino, da Renesas Electronics America, pelas sugestões iniciais e
apoio dado ao livro.
- Ritesh Tyagi, diretor da área de marketing de microcontroladores pelo apoio da
Renesas Electronics America a edição deste livro.
- José Carlos Nunes, da VLA, representante da Renesas no Brasil, pelo apoio dado
ao livro, sugestões e amostras.
Dedicatória
Escrever um livro implica em centenas de horas de dedicação. Por isso, quero
dedicar este livro a minha esposa Débora e agradecer pelo carinho, compreensão, apoio e
por estar ao meu lado!
Amo você!
Microcontroladores RL78: Guia Básico
3
Sobre o Autor
Fábio Pereira é técnico em Eletrônica (CEFET-PR), bacharel em Direito (ACE-SC),
especialista em projeto de equipamentos eletrônicos (CEFET-SC) e autor de outros oito
livros na área de programação de microcontroladores (sete deles em português e um em
inglês).
Também atuou como professor de disciplinas relacionadas a microcontroladores e
programação em C em cursos técnicos e universidades na região de Joinville e atualmente
trabalha como advogado e nas horas vagas mantém o seu blog FPB
(www.sctec.com.br/blog) além de desenvolver projetos de sistemas embarcados.
Ao longo dos últimos 20 anos, desenvolveu diversas aplicações utilizando diferentes
plataformas tais como 8051, ARM, AVR, Cortex, Coldfire, HC908, HCS08, MSP430, PIC,
RL78, Z8-Encore, Z-80 em diferentes linguagens como Assembly, BASIC, C e Pascal.
Outros livros do autor:
Microcontroladores PIC: Técnicas Avançadas;
Microcontroladores PIC: Programação em C;
Microcontroladores HC908Q: Teoria e Prática;
Microcontroladores MSP430: Teoria e Prática;
Microcontroladores HCS08: Teoria e Prática;
Tecnologia ARM: Microcontroladores de 32 bits;
HCS08 Unleashed: Designer’s guide to the HCS08 Microcontrollers;
Microcontrolador PIC18 Detalhado : Hardware e Software.
Para entrar em contato com o autor, acesse o blog: www.sctec.com.br/blog
4
Microcontroladores RL78: Guia Básico
Sobre a Renesas
Renesas é uma empresa japonesa na área de eletrônica e foi fundada em 2003 como
uma joint venture entre a Hitachi e a Mitsubishi Electric, ambas gigantes japonesas com
grande atuação na área da eletrônica. Em 2010 a NEC Electronics Corporation juntou-se à
Renesas e trouxe com ela a sua linha de microcontroladores e microprocessadores
(expandindo ainda mais a já ampla linha de MCUs e MPUs da Renesas).
A linha de produtos fabricados pela Renesas é digna do peso dos três principais
sócios da empresa: vai de microcontroladores 8 bits de baixo custo (como os 78K0
desenvolvidos pela NEC e H8 desenvolvidos pela Hitachi), passando pelos
microcontroladores de 16 bits (H8, R8C e M16C desenvolvidos pela Hitachi, 78K0R
desenvolvidos pela NEC e RL78 da Renesas), microcontroladores de 32 bits (como o
R32C, RX e RH850 da Renesas, V850 desenvolvido pela NEC e os SuperH desenvolvidos
pela Hitachi), até microprocessadores SoC de alta performance para os mercados móveis e
automotivos (utilizando múltiplos núcleos ARM, Cortex e SuperH). Além dos MCUs e
MPUs a Renesas fabrica diversos outros semicondutores como integrados LSI, ASSP,
Displays, IGBTs, MOSFETs, etc.
A Renesas foi o quinto maior fabricante de semicondutores nos anos de 2010 e 2011
e o primeiro em venda de microcontroladores no mesmo período. A participação da
Renesas no mercado mundial de microcontroladores é de aproximadamente 28%, com
vendas anuais de mais de 4 bilhões de dólares.
A empresa possui diversos escritórios ao redor do mundo. No Brasil, a presença da
empresa vem crescendo, com um escritório em São Paulo e investimentos em divulgação e
ampliação da margem local de mercado.
Microcontroladores RL78: Guia Básico
5
6
Microcontroladores RL78: Guia Básico
Índice
1. Introdução ............................................................................................................................... 13
1.1. Uma Breve História da Computação .......................................................................... 13
1.2. Sistemas Embarcados ................................................................................................. 17
1.3. Conceitos Básicos....................................................................................................... 18
1.4. Microcontroladores RL78........................................................................................... 30
1.5. Pinagens e Encapsulamentos ...................................................................................... 32
1.6. R5F100LEA ............................................................................................................... 35
1.7. Kits e Ferramentas de Programação ........................................................................... 36
1.8. Convenções Utilizadas ............................................................................................... 38
2. Ferramentas de Programação ............................................................................................... 41
2.1. O Ambiente Embedded Workbench EWRL78........................................................... 41
2.1.1. Criando o Primeiro Projeto ............................................................................. 41
2.1.2. Simulando um Programa................................................................................. 46
2.1.3. Depurando um Programa ................................................................................ 51
2.1.4. Gerando o Código Final .................................................................................. 52
3. Arquitetura e Modelo de Programação ................................................................................ 55
3.1. A CPU RL78 .............................................................................................................. 55
3.1.1. Registradores Especiais da CPU ..................................................................... 56
3.1.1.1. Registrador PSW....................................................................................................57
3.1.1.2. Registrador PC.......................................................................................................58
3.1.1.3. Registrador SP .......................................................................................................58
3.1.1.4. Registradores ES e CS ...........................................................................................60
3.1.1.5. Registrador PMC ...................................................................................................60
3.1.2. Mapa de Memória ........................................................................................... 61
3.1.3. Modos de Endereçamento ............................................................................... 63
3.2. Conjunto de Instruções Assembly .............................................................................. 65
3.2.1. Instruções de Manipulação de Dados.............................................................. 65
3.2.2. Instruções Aritméticas, Lógicas e de Comparação.......................................... 66
3.2.3. Instruções de Incremento e Decremento ......................................................... 68
3.2.4. Instruções de Rotação e Deslocamento de Bits ............................................... 68
3.2.5. Instruções de Manipulação e Processamento de Bits ...................................... 71
3.2.6. Instruções de Desvio ....................................................................................... 71
Microcontroladores RL78 Guia Básico
7
3.2.7. Instruções para Sub-rotinas e Funções ............................................................ 72
3.2.8. Instruções de Pulo Condicional....................................................................... 73
3.2.9. Instruções de Controle da CPU....................................................................... 73
3.2.10. Temporização das Instruções ........................................................................ 74
3.3. Módulo OCD e Código de Segurança (Security ID) .................................................. 74
3.4. Configurações do Chip ............................................................................................... 76
4. Suporte à CPU ........................................................................................................................ 81
4.1. Reset........................................................................................................................... 81
4.2. Sistema de Clock ........................................................................................................ 83
4.2.1. Oscilador X1 ................................................................................................... 84
4.2.2. Oscilador XT1................................................................................................. 85
4.2.3. Oscilador Interno de Alta Frequência ............................................................. 86
4.2.4. Oscilador Interno de Baixa Frequência........................................................... 87
4.2.5. Registradores do Sistema de Clock................................................................. 87
4.2.6. Exemplo .......................................................................................................... 91
4.3. Gerenciamento de Energia ......................................................................................... 92
4.3.1. Modo Halt ....................................................................................................... 93
4.3.2. Modo Stop....................................................................................................... 93
4.3.3. Modo Snooze .................................................................................................. 94
4.3.4. Gerenciamento de Clock................................................................................. 95
4.3.5. Dicas para Reduzir o Consumo de Energia..................................................... 96
4.3.6. Exemplo .......................................................................................................... 96
4.4. Clock/Buzzer Output .................................................................................................. 98
4.4.1. Exemplo .......................................................................................................... 99
4.5. Detector de Baixa Tensão......................................................................................... 100
4.5.1. Modo Reset ................................................................................................... 100
4.5.2. Modo Interrupção.......................................................................................... 101
4.5.3. Modo Interrupção e Reset ............................................................................. 101
4.5.4. Registradores do LVD .................................................................................. 102
4.6. Watchdog (WDT)..................................................................................................... 104
4.6.1. Exemplo ........................................................................................................ 106
4.7. Regulador Interno de Tensão.................................................................................... 108
5. Portas de Entrada e Saída.................................................................................................... 109
8
Microcontroladores RL78: Guia Básico
5.1. Registradores das Portas de E/S ............................................................................... 110
5.2. Redirecionamento de Funções.................................................................................. 116
5.3. Exemplo.................................................................................................................... 117
6. Sistema de Interrupções ....................................................................................................... 121
6.1. Categorias de Interrupções ....................................................................................... 123
6.2. Sistema de Interrupções do RL78............................................................................. 123
6.2.1. Sistema de Prioridades de Interrupção .......................................................... 127
6.2.2. Latência de Interrupção ................................................................................. 129
6.2.3. Utilizando os Bancos de Registradores dos RL78......................................... 130
6.3. Interrupções Externas ............................................................................................... 131
6.3.1. Exemplo ........................................................................................................ 133
6.4. Interrupção de Teclado ............................................................................................. 134
6.4.1. Exemplo ........................................................................................................ 134
7. Periféricos de Temporização................................................................................................ 137
7.1. Timer de Intervalo (IT)............................................................................................. 138
7.1.1. Exemplo ........................................................................................................ 139
7.2. RTC .......................................................................................................................... 140
7.2.1. Configuração do RTC ................................................................................... 142
7.2.2. Registradores do RTC ................................................................................... 143
7.2.3. Ajuste do RTC............................................................................................... 147
7.2.4. Exemplo ........................................................................................................ 148
7.3. TAU.......................................................................................................................... 150
7.3.1. Visão Geral de uma Unidade TAU ............................................................... 151
7.3.2. Operação em Modo Timer/Gerador de Onda Quadrada ............................... 153
7.3.3. Operação no Modo Gerador de Atraso/Disparo Único ................................. 156
7.3.4. Operação em Modo Contador de Eventos..................................................... 158
7.3.5. Operação como Divisor de Frequência ......................................................... 159
7.3.6. Operação no Modo de Captura de Período.................................................... 160
7.3.7. Operação no Modo de Captura de Ciclo ....................................................... 161
7.3.8. Operação no Modo de Pulso Configurável ................................................... 162
7.3.9. Operação em Modo PWM............................................................................. 166
7.3.10. Registradores das TAU ............................................................................... 169
7.4. Outros Timers ........................................................................................................... 177
Microcontroladores RL78 Guia Básico
9
8. Periféricos de Analógicos ..................................................................................................... 179
8.1. Detalhes Gerais do Conversor A/D .......................................................................... 179
8.2. Modos de Operação.................................................................................................. 185
8.2.1. Conversão Simples ou Múltipla .................................................................... 185
8.2.2. Conversão de Um Canal ou Varredura de Canais......................................... 186
8.2.3. Formas de Disparo do Conversor.................................................................. 186
8.2.3.1. Disparo por Software........................................................................................... 187
8.2.3.2. Disparo por Hardware ......................................................................................... 187
8.3. Referência Interna de Tensão ................................................................................... 188
8.4. Sensor de Temperatura ............................................................................................. 188
8.5. Operação em Modo Snooze...................................................................................... 189
8.6. Registradores do ADC.............................................................................................. 190
8.7. Exemplo ................................................................................................................... 193
8.8. Outros Periféricos Disponíveis................................................................................. 194
8.8.1. Comparador Analógico ................................................................................. 194
8.8.2. Conversor A/D de 12 bits.............................................................................. 194
8.8.3. Conversor D/A .............................................................................................. 194
9. Periféricos de Comunicação................................................................................................. 195
9.1. Unidades SAU.......................................................................................................... 195
9.1.1. Registradores das SAU ................................................................................. 198
9.1.2. Modo UART ................................................................................................. 205
9.1.2.1. Configuração do Baud Rate................................................................................. 207
9.1.2.2. Operação em Modo Snooze................................................................................. 210
9.1.2.3. LIN ...................................................................................................................... 210
9.1.2.4. API Applilet ........................................................................................................ 210
9.1.2.5. Exemplo .............................................................................................................. 211
9.1.3. Modo CSI...................................................................................................... 213
9.1.3.1. Configuração do Baud Rate................................................................................. 216
9.1.3.2. API Applilet ........................................................................................................ 217
9.1.4. Modo I2C....................................................................................................... 218
9.1.4.1. I2C Simplificado na SAU .................................................................................... 220
9.1.4.2. Configuração do Baud Rate................................................................................. 223
9.1.4.3. Comunicação I2C................................................................................................. 223
9.1.4.4. API Applilet ........................................................................................................ 225
9.2. Unidades IICA (I2C)................................................................................................. 226
9.2.1. Operação da IICA ......................................................................................... 227
9.2.2. API Applilet .................................................................................................. 228
9.2.3. Registradores IICA ....................................................................................... 230
10
Microcontroladores RL78: Guia Básico
10. Tópicos Avançados ............................................................................................................. 235
10.1. Ajuste BCD ............................................................................................................ 235
10.2. Funções de Segurança ............................................................................................ 236
10.2.1. Checagem de CRC da Flash........................................................................ 237
10.2.2. Checagem de Paridade da RAM ................................................................. 238
10.2.3. Bloqueio de Registradores e da RAM ......................................................... 239
10.2.4. Execução de Opcode Ilegal (Trap).............................................................. 240
10.2.5. Acesso Ilegal à Memória (IAW) ................................................................. 240
10.2.6. Verificação do A/D ..................................................................................... 240
10.2.7. Verificação do Clock................................................................................... 240
10.3. CRC de Uso Geral .................................................................................................. 241
10.4. Gravação e Apagamento da Flash e DataFlash....................................................... 242
10.4.1. FSL.............................................................................................................. 242
10.4.1.1. Utilização da FSL ..............................................................................................247
10.5. Hardware de Multiplicação e Divisão .................................................................... 253
10.6. DMA....................................................................................................................... 255
10.6.1. Registradores dos Canais de DMA ............................................................. 258
10.6.2. Exemplo ...................................................................................................... 261
10.7. Otimizando Aplicações para o RL78...................................................................... 263
10.7.1. Tamanho do Dado ....................................................................................... 263
10.7.2. Endereçamento Rápido ............................................................................... 264
10.7.3. Campos de Bit ............................................................................................. 264
10.7.4. Funções CALLT.......................................................................................... 265
10.8. Utilizando o Applilet3 ............................................................................................ 266
10.8.1. Configuração do Timer de Intervalo ........................................................... 268
10.8.2. Configuração da UART .............................................................................. 271
11. Exemplos de Aplicação ....................................................................................................... 273
11.1. Utilização de Módulos LCD Alfanuméricos .......................................................... 273
11.2. Mostrador Analógico no LCD ................................................................................ 280
11.3. Termômetro Digital ................................................................................................ 283
11.4. Medidor de Distância por Ultrassom ...................................................................... 286
12. Tabela ASCII ...................................................................................................................... 291
Microcontroladores RL78 Guia Básico
11
12
Microcontroladores RL78: Guia Básico
1
Introdução
1. Introdução
O objetivo deste livro é apresentar a família RL78 de microcontroladores da Renesas, com
ênfase nos modelos RL78/G13. Antes de nos dedicarmos ao estudo deles é importante conhecer
um pouco da história da computação digital, além de revisar conceitos cruciais na área da
eletrônica digital e lógica de programação.
1.1. Uma Breve História da Computação
As primeiras máquinas de computação de que se tem notícia datam de 1623 (a máquina de
cálculos de Wilhelm Schickard) e 1642 (a máquina Pascaline de Blaise Pascal). Ambas eram
totalmente mecânicas e utilizavam intrincados mecanismos para realizar operações de adição.
Em 1671, o matemático e filósofo alemão Gottfried Von Leibniz desenhou a Staffelwalze
(também conhecida como “Stepped Reckoner” ou calculadora de passos), a primeira calculadora
mecânica capaz de realizar as quatro operações básicas da matemática (adição, subtração,
multiplicação e divisão).
Figura 1.1 – Pascaline
Fonte: http://fr.wikipedia.org/wiki/Fichier:Arts_et_Metiers_Pascaline
_dsc03869.jpg
Figura 1.2 – Stepped Reckoner
Fonte:http://en.wikipedia.org/wiki/File:Leibniz_Stepped_Reckoner.png
Todas essas máquinas eram apenas calculadoras mecânicas e não podiam ser programadas
para executar operações predefinidas.
As primeiras máquinas programáveis surgiram no início do século XIX e eram muito
diferentes do conceito atual de um computador. O tear Jacquard (criado por Joseph Marie
Jacquard em 1801) é provavelmente a primeira máquina passível de ser programada pelo usuário.
Utilizando cartões de papel perfurados, era possível programar complexos padrões a serem
tecidos, aumentando drasticamente a flexibilidade dos teares, que até então somente podiam tecer
um mesmo padrão. Isso permitiu que um mesmo tear fosse utilizado para produzir diferentes
padrões de tecidos.
Introdução
13
Alguns anos depois (1837), Charles Babbage desenhou a sua “Analytical Engine”
(máquina analítica) que seria provavelmente o primeiro computador totalmente programável se
ela tivesse sido realmente construída.
Figura 1.3 - Tear Jacquard.
Fonte: http://commons.wikimedia.org/wiki/Image:Jacquard.loom.
full.view.jpg
Figura 1.4 – Cartões perfurados para programação
do tear Jacquard. Fonte: http://en.wikipedia.org/
wiki/File:Jacquard.loom.cards.jpg
O grande progresso da computação ocorreu com o advento das “Tabulating Machines”
(máquinas de tabular) de Herman Hollerith (manufaturadas pela “Computing Tabulating
Recording Corporation”, que algum tempo depois originou a IBM).
As máquinas de tabular de Hollerith também utilizavam cartões de papel perfurados e
permitiram que o censo Norte-Americano de 1890 fosse completado em apenas dezoito meses (o
censo anterior, de 1880, foi completado em sete anos!). Essas máquinas não eram programáveis,
mas foram um passo importante na direção dos computadores programáveis.
Em 1941, no Iowa State College, o pesquisador John Vincent Atanasoff projetou e
construiu o Atanasoff-Berry Computer (ABC), primeiro computador eletrônico norte-americano.
Ele foi projetado especificamente para auxiliar na resolução de equações lineares e, apesar de não
ser programável nem ser máquina Turing completa, o ABC apresentou alguns conceitos
importantes:
14
•
Sistema organizado com unidades separadas de computação e de memória (como nos
computadores atuais).
•
Memória capacitiva regenerativa com aproximadamente 3.200 capacitores
organizados em dois tambores, cada um com 32 bandas de 50 capacitores (duas
bandas não eram utilizadas e ficavam como reserva), resultando numa capacidade
total de armazenamento de 60 números de 50 bits. Esse sistema de regeneração foi o
precursor dos sistemas de refresh das memórias DRAM atuais e funcionava
rotacionando os tambores num eixo com pinças para acesso aos dados.
Microcontroladores RL78: Guia Básico
•
Unidade lógica e aritmética (ULA) totalmente eletrônica construída com uso de cerca
de 280 válvulas a vácuo.
•
O sistema de I/O era composto de um sistema primário e um sistema secundário para
resultados intermediários (utilizado quando os problemas sendo resolvidos excediam
a capacidade de armazenamento da memória eletrônica interna).
O primeiro computador digital (e binário) totalmente programável foi o Z3, projetado e
construído pelo engenheiro alemão Konrad Zuse em 1941.
Esse computador utilizava cerca de
2.000 relés no papel de chaves, portanto era
eletromecânico. O programa era armazenado
externamente numa fita perfurada, permitindo
que diferentes programas fossem executados
com relativa facilidade.
O Z3 possuía em seu conjunto de
instruções
praticamente
todas
as
Figura 1.5 - Zuse Z3.
funcionalidades encontradas nos computadores Fonte:http://www.computerhistory.org/timeline/images/1941_zuse_z3_
large.jpg
modernos, com exceção das instruções de
desvio (que foram implementadas posteriormente no microcódigo para cálculos em ponto
flutuante).
Em 1943, os pesquisadores do Post Office Research Station em Dollis Hill (Inglaterra)
apresentaram o protótipo de um dos primeiros computadores eletrônicos: o Colossus Mark 1.
Esse computador (na verdade a sua segunda geração, Colossus Mark 2) foi utilizado para auxiliar
na decodificação das mensagens alemãs criptografadas durante a Segunda Guerra Mundial.
Outro famoso computador dessa era foi o ENIAC (Electronic Numerical Integrator And
Computer), um computador eletrônico projetado e construído pelo Laboratório de Pesquisa
Balística do Exército Norte-Americano, em 1946, para auxiliar no cálculo de tabelas de artilharia
e outros problemas matemáticos complexos (como os relacionados ao projeto das primeiras
bombas atômicas).
O ENIAC era um computador enorme,
composto por milhares de válvulas eletrônicas,
diodos de cristal e relés. Possuía registradores
decimais de dez dígitos e operava com clock de
100kHz, consumindo cerca de 174kW em
operação. Uma de suas grandes fraquezas era o
sistema de armazenamento do programa, que era
realizado pela interligação de fios no interior do
computador. Sendo assim, qualquer alteração
implicava esforço considerável.
Em 1948, alguns melhoramentos foram
adicionados ao ENIAC; o mais importante foi um
Introdução
Figura 1.6 - ENIAC. Fonte:
http://en.wikipedia.org/wiki/Image:Classic_shot_of_the_ENIAC.jpg
15
dispositivo de leitura de programa utilizando tabelas de funções (proposto pelo matemático John
von Neumann). Esse mecanismo funcionava como uma ROM (Read-Only Memory ou memória
somente de leitura) de programa primitiva.
Outro computador famoso e importante foi o ASCC (Automatic Sequence Controlled
Calculator - calculadora automática de sequência controlada) da IBM (também conhecido como
IBM Mark I), projetado por Howard H. Aiken da Universidade de Harvard e construído pela
IBM em 1944. Ele foi o primeiro computador totalmente automático e que funcionava de forma
muito semelhante aos computadores modernos.
O ASCC era um computador eletromecânico e possuía memórias separadas para o
armazenamento das instruções do programa e os dados. Essa arquitetura ficaria conhecida como
“arquitetura Harvard”.
Já o IBM SSEC (Selective Sequence Electronic Calculator - calculadora eletrônica de
sequência seletiva), construído em 1948, implementava outra abordagem para a sua arquitetura
interna: um espaço de memória unificado onde são armazenadas tanto as instruções quanto os
dados. Essa arquitetura ficou conhecida como “Von Neumann” ou Princeton, em homenagem ao
matemático John von Neumann da Universidade de Princeton (EUA), ainda que John Presper
Eckert (um dos homens por trás do projeto do ENIAC) tenha proposto a mesma arquitetura anos
antes de Von Neumann.
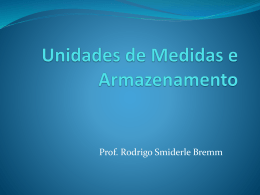
Essas duas arquiteturas de computadores (Von Neumann e Harvard) ainda estão em uso
mesmo nos mais modernos computadores da atualidade. A Figura 1.7 mostra os diagramas
simplificados dessas duas arquiteturas.
A arquitetura Von Neumann (também chamada Princeton) caracteriza-se por utilizar três
barramentos de comunicação que são compartilhados pela memória e E/S, um para o
endereçamento (seleção da posição a ser lida ou escrita), um para o controle (seleção do tipo de
operação a ser realizada) e outro para dados (que carrega a informação propriamente dita).
A arquitetura Harvard, por sua vez, utiliza conjuntos de barramentos separados para as
memórias e E/S, diferenciando ainda entre memória de programa (onde ficam armazenados as
instruções do programa) e de dados (onde ficam os dados utilizados pelo programa).
Endereço
Endereço (programa)
Memória
Programa/
Dados
Controle
CPU
Dados
Dados (programa)
Controle (programa)
Memória de
Programa
Endereço (dados)
CPU
Dados (dados)
Controle (dados)
Memória de
Dados
Endereço (periféricos)
Periféricos
Dados (periféricos)
Controle (periféricos)
Arquitetura Von Neumann (Princeton)
Periféricos
Arquitetura Harvard
Figura 1.7
Cada arquitetura apresenta prós e contras: Von Neumann oferece mais flexibilidade, pois
não faz distinção entre instruções e dados. Por outro lado, ela impõe uma única largura para o
barramento de dados, implicando que uma CPU de 8 bits busque instruções de 8 ou múltiplos de
16
Microcontroladores RL78: Guia Básico
8 bits. Outro ponto fraco da arquitetura Von Neumann é um problema conhecido como “gargalo
de Von Neumann”, causado pela capacidade limitada de transferência de dados da memória,
quando comparada à necessidade da CPU de acessar a memória para leitura de instruções e a
leitura/escrita de dados.
Apesar de todos os problemas impostos por essa arquitetura, ela ainda é vastamente
utilizada pela maioria dos computadores atuais e dos microprocessadores e microcontroladores
no mercado.
Na arquitetura Harvard, a velocidade é o benefício mais relevante do arranjo de múltiplos
barramentos: enquanto executa uma instrução, a CPU pode ler e escrever dados na memória de
dados e simultaneamente buscar a próxima instrução na memória de programa. Neste caso, os
prós e contras se misturam devido à distinção entre a memória de programa e de dados:
normalmente não é possível ter dados na memória de programa ou instruções na memória de
dados. Algumas máquinas Harvard incluem instruções especiais que permitem o acesso à
memória de programa para leitura/escrita de dados. Outras implementam áreas especiais de
memória compartilhadas por instruções e dados.
Além das arquiteturas de projeto citadas, existem também dois diferentes conceitos
básicos de projeto do conjunto de instruções de um processador: o conceito CISC e o conceito
RISC.
O conceito CISC (computador com conjunto complexo de instruções) defende que a
máquina possua uma grande quantidade de instruções (normalmente acima de 100), capazes de
desempenhar as mais diferentes tarefas. Máquinas CISC normalmente possuem instruções
complexas que realizam uma série de operações.
Já o conceito RISC (computador com conjunto reduzido de instruções) defende que a
máquina possua um conjunto pequeno de instruções, mas que devem ser executadas rapidamente.
Máquinas RISC normalmente possuem instruções simples e rápidas e necessitam de múltiplas
instruções para realizar operações mais complexas.
Normalmente encontramos máquinas RISC associadas à arquitetura Harvard, ao passo
que as máquinas CISC normalmente utilizam a arquitetura Von Neumann.
1.2. Sistemas Embarcados
A aplicação de computadores em dispositivos móveis ou capazes de ser movidos resultou
em uma geração totalmente diferente de computadores e originou o termo “embedded system” ou
sistema embarcado.
Um dos primeiros sistemas embarcados de que se tem notícia foi o Apollo Guidance
Computer, ou AGC. Ele foi um computador (na verdade um microcomputador) de 16 bits (15 de
dados mais um de paridade), que operava a 1,024MHz e que possuía 2.048 words de memória
RAM e 36.864 words de memória de programa. Este microcomputador foi um dos primeiros
computadores digitais a utilizar circuitos integrados e foi utilizado para o controle das
espaçonaves Apollo (que em diversas missões nas décadas de 60 e 70, levaram o homem à Lua).
Ele também possuía uma IHM (Interface Homem Máquina) composta de um teclado
numérico e displays eletroluminescentes, através da qual os astronautas podiam operá-lo, inserir
Introdução
17
e visualizar dados, executar comandos e programas e até mesmo reprogramá-lo (como aconteceu
na missão Apollo 14).
A – Módulos AGC e DSKY
B – Módulo DSKY.
Fonte: http://en.wikipedia.org/wiki/File:Agc_view.jpg
Fonte:http://www.computerhistory.org/timeline/images/
1968_apollo.jpg
Figura 1.8
O AGC utilizava a primeira geração de circuitos integrados (portas NOR duplas com 3
entradas cada e implementadas utilizando tecnologia RTL – Resistor Transistor Logic), mas foi o
advento do microprocessador (o 4004 desenvolvido pela Intel em 1971) e posteriormente do
microcontrolador (o TMS1000 desenvolvido pela Texas Instruments em 1971 e lançado em
1974) que permitiu que os sistemas embarcados pudessem ser barateados e terem reduzidos
drasticamente o seu tamanho físico e o consumo de energia (todos fatores importantes quando se
fala em sistemas embarcados).
Atualmente os microcontroladores e o termo “sistema embarcado” possuem uma
aplicação muito ampla, sendo utilizados em equipamentos simples (como torradeiras, cafeteiras,
etc.) até complexos (como equipamentos médicos, smartphones, GPS, etc.).
1.3. Conceitos Básicos
Eletrônica é a ciência que estuda e aplica a eletricidade (o movimento de cargas elétricas)
aos componentes (resistores, capacitores, indutores, semicondutores etc.) para construir circuitos
complexos que podem interagir com o ambiente ou com os seres humanos.
De cafeteiras a TVs LCD, de lâmpadas elétricas a smartphones, de relógios de pulso a
tablets e computadores, interagimos diariamente com um grande número de diferentes
dispositivos elétricos e eletrônicos, alguns dos quais são tão pequenos ou simples que sequer nos
damos conta da sua existência.
Dentro do universo da eletrônica, uma das áreas mais interessantes e que movimenta o
mercado é a dos microprocessadores e microcontroladores, pequenos chips que incluem
internamente praticamente toda a eletrônica necessária para construir máquinas e dispositivos
dotados de alguma forma de inteligência.
A base por trás dos microcontroladores e microprocessadores é a eletrônica digital. Para
melhor entendê-la, é necessária uma breve reflexão sobre como o universo funciona.
18
Microcontroladores RL78: Guia Básico
O mundo é analógico: a temperatura de uma sala, a intensidade da luz, o tempo, as
dimensões físicas de uma caixa, o som, a distância entre casas e trabalhos, tudo isso é medido por
grandezas analógicas. Elas podem ser medidas utilizando algum tipo de unidade de medição e
podem variar consideravelmente (imagine que nada no mundo é exatamente igual; mesmo os
mecanismos produzidos pela máquina mais precisa serão ligeiramente diferentes se medidos com
a devida precisão).
Por outro lado, os computadores modernos são máquinas eminentemente binárias. Eles
somente podem reconhecer dois tipos de informação: 0 (falso) ou 1 (verdadeiro). As imagens,
filmes e cores que vemos na tela de um computador ou em filme em DVD, a música que
ouvimos de um CD player ou de um MP3 player, tudo isso pode ser reduzido somente a zeros e
uns.
As razões para utilizar um sistema binário (digital) em vez de um sistema analógico são
muito simples:
1.
Por existirem somente dois níveis de tensão, é mais simples projetar os circuitos
eletrônicos de computadores digitais. A utilização de transistores como chaves
permite obter dois níveis distintos de tensão (0V para chave aberta ou falso e 5V para
chave fechada ou verdadeiro).
2.
A matemática por trás dos modernos computadores é baseada na álgebra booleana,
criada por George Boole (um matemático e filósofo inglês que viveu no século XVIII
e que criou a álgebra booleana, baseada em dois estados: verdadeiro e falso).
Vemos então que os computadores utilizam a base binária, ao passo que nós, seres
humanos, utilizamos a base decimal, constituída de 10 diferentes símbolos (0 a 9) e adotada em
virtude de possuirmos 10 dedos nas mãos (as mãos foram o primeiro instrumento de cálculo na
história da humanidade), mas além dessas duas bases, existem outras bases numéricas
importantes, entre elas a octal (que utiliza 8 diferentes símbolos, de 0 a 7) e hexadecimal (base 16
diferentes símbolos, de 0 a 9, A, B, C, D, E, F).
A base hexadecimal permite representar diretamente um valor binário utilizando poucos
dígitos. Ela foi muito importante nos primórdios da computação, pois permitia que os sistemas de
apresentação de dados utilizassem displays com poucos dígitos, assim como os teclados também
eram mais fáceis de construir (displays eram itens complexos e caros até a década de 80, foi
somente com a invenção dos LEDs e posteriormente dos displays LED que houve uma redução
significativa no custo dos mesmos).
A facilidade de representação de valores binários em hexadecimal é oriunda do processo
de conversão, que é absolutamente simples e intuitivo (o mesmo não ocorre com binário e
decimal, por exemplo).
Para entender a razão desta simplicidade, vejamos como funciona o sistema de bases
numéricas. Primeiramente, é importante observar que em qualquer base numérica existem dígitos
e através da junção de múltiplos dígitos é que se pode representar uma quantidade arbitrária
qualquer.
O primeiro dígito (o menos significativo) em qualquer base tem sempre o peso 1. Ele
corresponde a base elevada a potência 0. O dígito de magnitude imediatamente superior é o da
Introdução
19
base elevada a potência 1 e assim por diante. Os pesos das diferentes posições nas bases
numéricas podem ser vistos na tabela 1.2.
Binário Decimal Hexadecimal
0000
0
0
0001
1
1
0010
2
2
0011
3
3
0100
4
4
0101
5
5
0110
6
6
0111
7
7
1000
8
8
1001
9
9
1010
10
A
1011
11
B
1100
12
C
1101
13
D
1110
14
E
1111
15
F
Tabela 1.1
Peso
3
2
1
0
3
2
1
0
2 =1
1
Binário
2 =8
Decimal
3
2 =4
10 =1000
10 =100
10 =10
100=1
Hexadecimal
163=4096
162=256
161=16
160=1
2
2 =2
Tabela 1.2
Seguindo a tabela 1.2, o número 1001 binário equivale a 1*8 + 0*4 + 0*2 + 1*1 = 9
decimal, o número 1001 decimal equivale a uma milhar (1*1000) mais uma unidade (1*1) e o
número 1001 hexadecimal equivale a 1*4096 + 1*1 = 4097 decimal.
É fácil perceber que com dois dígitos binários podemos representar até 4 diferentes
valores (00, 01, 10 e 11), com dois dígitos decimais podemos representar até 100 diferentes
valores (de 0 a 99) e com dois dígitos hexadecimais podemos representar até 256 valores (de 0 a
FF).
Mas além da simplificação da representação de dados (em termos de redução no número
de dígitos), a base hexadecimal oferece ainda a facilidade adicional de permitir a simples e rápida
conversão de/para binário. Tudo o que é necessário é agrupar os dígitos binários em nibbles
(conjuntos de 4 bits) e em seguida realizar diretamente a conversão de/para hexadecimal.
Vejamos alguns exemplos: 01000010 em binário pode ser separado em 0100 e 0010, 0100
equivale a 4 hexadecimal, 0010 equivale a 2 hexadecimal, então 01000010 binário equivale a 42
hexadecimal. 10100110 em binário, 1010 equivale a A hexadecimal, 0110 equivale a 6
hexadecimal, então 10100110 binário equivale a A6 hexadecimal. A recíproca também é
20
Microcontroladores RL78: Guia Básico
verdadeira: 7B hexadecimal, 7 hexadecimal equiva e 0111 binário e B hexadecimal equivale a
1011 binário, então 7B hexadecimal equivale a 01111011 binário!
A aritmética, em qualquer que seja a base, também é baseada em princípios comuns e
deve sempre levar em consideração a quantidade de símbolos únicos existentes na base, para
cada posição numérica.
Assim, a soma de 7 + 5 em decimal é feita agrupando os dígitos de magnitude
equivalente. Nos casos onde não há dígito para representar a magnitude desejada, ocorre o
transporte para a próxima posição:
7
5
12
+
No caso, a adição de 7 com 5, resulta que não há um símbolo decimal único para
representar a grandeza, por isso, há um transporte para a próxima posição.
Nas operações em outras bases (seja binário, hexadecimal, etc.), o procedimento é
exatamente o mesmo. Vejamos a adição dos valores binários 10 + 10:
10
10
100
+
Outro exemplo, desta vez em hexadecimal. Vejamos a adição de 9 + 9:
9
9
12
+
Quando se realiza operações aritméticas envolvendo bytes (conjuntos de 8 bits), diz-se
que ocorre um transporte (carry em inglês) quando há um transporte binário do bit 7 (o oitavo bit
do byte).
No caso das operações de subtração, utiliza-se basicamente o mesmo princípio da adição e
os circuitos somadores, no entanto, para a subtração, faz-se a soma do minuendo com subtraendo,
sendo este escrito com sinal inverso:
-
10
4
6
10
-4
6
+
é o mesmo que
Isto permite que as unidades lógicas e aritméticas dos microprocessadores e
microcontroladores possam realizar operações de subtração a partir de um circuito somador. Para
isso, utiliza-se uma representação binária chamada de “complemento de dois”, que consiste no
complemento (inversão de todos os bits) e a adição de um. Assim, para obtermos o equivale a -4,
utilizamos o valor absoluto 4 para obter o complemento de dois conforme abaixo:
Valor absoluto (4)
Complemento
+
1
Resultado
0
1
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
0
1
0
Para realizar a operação 10-4 podemos, através de uma adição (8 bits), fazer:
Introdução
21
10
+
-4
Resultado
0
0
0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
0
1
0
0
A representação em complemento de dois também é utilizada nas operações com números
sinalizados (como os signed char e signed int em C). Neste caso, o bit mais significativo (aquele
mais à esquerda) representa o sinal (0 = positivo e 1 = negativo), enquanto que os demais bits
representam a magnitude do número.
Assim, a representação binária de 8 e 16 bits em complemento de dois segue a seguinte
forma:
sinal
Bit 6
Bit 5
sinal Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9
Bit 4
Bit 8
Bit 3
Bit 7
Bit 2
Bit 6
Bit 1
Bit 5
Bit 0
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Figura 1.9
A tabela a seguir mostra uma escala reduzida dos valores decimais de 8 bits sinalizados e
a sua representação binária em complemento de dois.
Decimal
127
126
...
2
1
0
-1
-2
...
-126
-127
-128
Binário
01111111
01111110
...
00000010
00000001
00000000
11111111
11111110
...
10000010
10000001
10000000
Tabela 1.3
Agora que já vimos alguns conceitos importantes acerca de bases numéricas e suas
operações básicas é hora de rever alguns dos conceitos relacionados aos circuitos digitais que
formam a base para os computadores e microcontroladores.
Circuitos digitais podem ser construídos com transistores (circuitos TTL - TransistorTransistor Logic), MOSFETs (circuitos CMOS - Complementary Metal-Oxide-Seminconductor),
etc. Nos circuitos TTL, transistores NPN e PNP, figura 1.10B, são utilizados para controlar os
níveis lógicos no interior do chip. Nos circuitos CMOS,
MOSFETs canal N e canal P (figura 1.10C), fazem o
papel das chaves. O propósito é sempre o mesmo:
utilizar um elemento de comutação para simular
uma chave, de forma a produzir os dois estados
lógicos possíveis.
Figura 1.10 - Três elementos de
Com base na álgebra booleana existem
comutação
quatro funções básicas na eletrônica digital: NÃO,
22
Microcontroladores RL78: Guia Básico
E, OU e OU exclusivo (ou simplesmente EOU). A função NÃO realiza a inversão do nível lógico
de entrada: NÃO 0 = 1 e NÃO 1 = 0. A função E retorna verdadeiro (1) quando todas as entradas
são verdadeiras, a função OU retorna verdadeiro quando qualquer uma das entradas é verdadeira
e a função EOU retorna verdadeiro quando as entradas são diferentes. A tabela 1.4 mostra a
tabela verdade para as três funções lógicas básicas.
Entrada
A
B
0
0
0
1
1
0
1
1
AND
0
0
0
1
Saída
OR EOR
0
0
1
1
1
1
1
0
Tabela 1.4 - Funções lógicas básicas da eletrônica digital
Nas figuras 1.11A e 1.11B é possível ver como são construídas portas lógicas NÃO e
NÃO-E utilizando MOSFETs.
A - Porta lógica NÃO
B - Porta lógica NÃO-E (NAND)
Figura 1.11
Os símbolos padronizados das funções lógicas básicas (chamadas portas lógicas) estão
representados na figura 1.12.
Figura 1.12 - Portas lógicas básicas: NÃO (A), E (B), OU (C) e EOU (D)
Utilizando estas funções lógicas básicas é possível criar circuitos digitais complexos que
podem ser classificados em duas categorias: circuitos combinacionais e sequenciais.
Nos circuitos combinacionais, a saída é uma função do sinal de entrada. Alguns exemplos
são os somadores, subtratores, comparadores digitais etc. A figura 1.13A mostra a
implementação de um somador completo (o bloco básico dos circuitos aritméticos de qualquer
computador).
Nos circuitos sequenciais, a saída é uma função não somente do conteúdo atual da
entrada, mas também dos estados anteriores. Alguns exemplos de circuitos lógicos sequenciais
Introdução
23
são os flip-flops, registradores, contadores, latches etc. A figura 1.13B mostra um latch de dados
que constitui um dos elementos básicos de memória nos computadores modernos.
B - Latch de dados
A - Somador completo
Figura 1.13
Os circuitos lógicos sequenciais e combinacionais são elementos construtivos básicos das
CPUs (Unidades Centrais de Processamento) dos microprocessadores e microcontroladores que
utilizamos diariamente.
Mas o que é microprocessador? Como ele funciona? Qual a diferença entre
microprocessador e microcontrolador?
Para entender o que é um microprocessador, primeiro devemos entender mais alguns
conceitos relacionados a programação.
Um programa é a codificação em linguagem computacional de um algoritmo lógico criado
para resolver um problema específico.
Para escrever um programa, é necessário analisar cuidadosamente o problema a ser
resolvido, identificando todos os passos necessários para se atingir a solução.
Uma vez determinados os passos para chegar à solução, é preciso criar um algoritmo que
os descreva. A utilização de uma ferramenta gráfica como um fluxograma pode auxiliar na
criação de tal algoritmo.
Como exemplo, imagine o problema simples de contar de 0 até 10. Os passos para a
solução deste problema poderiam ser:
1. Iniciar a contagem em 0.
2. A contagem atual é igual a 10?
3. Sim? Então vai para o final.
4. Não? Então incrementa a contagem em um.
5. Retorna ao passo 2.
Listagem 1.1
O fluxograma que descreve o algoritmo sugerido pode ser visto na figura 1.14.
Estando de posse do algoritmo, é possível iniciar a codificação do programa de forma que
um computador entenda, mas como se faz isso?
A resposta é simples: utilizando a linguagem binária de zeros e uns!
24
Microcontroladores RL78: Guia Básico
Figura 1.14 - Fluxograma
À primeira vista pode parecer incrível que um computador capaz de desempenhar tarefas
tão complexas (como navegar pela Internet, reproduzir música, jogos etc.) somente seja capaz de
diferenciar zeros de uns, mas é exatamente isso que acontece.
De fato, é possível agrupar bits formando-se sequências maiores, que podem representar
números, instruções, cores ou o que quer que o programador deseje representar.
Qualquer computador, microcomputador, microprocessador, microcontrolador, etc.
reconhece algumas sequências de bits como instruções. Essas instruções dizem o que ele deve
fazer: adicionar números, armazenar algo na memória, desviar para outro ponto do programa etc.
A CPU é responsável pela leitura dessas instruções da memória, sua interpretação e execução.
Esses grupos de bits que possuem significado especial para a CPU são chamados de
códigos de operação (em inglês operation codes ou opcodes).
Computadores diferentes frequentemente possuem diferentes CPUs e diferentes CPUs
possuem diferentes opcodes para as instruções que elas reconhecem (isso explica por que você
não pode executar uma aplicação de um celular Android® em um celular iPhone® ou vice versa).
Tomemos como exemplo a instrução clear (CLRB). Ela apaga (preenche com zero) um
registrador ou o conteúdo de uma posição da memória. Nos microcontroladores RL78, essa
instrução pode ser representada por diversos opcodes (dependendo do tipo de operando da
instrução), assim, a instrução CLRB end (apaga o conteúdo da posição de memória indicada por
end) é representada pelo código binário 11110100 xxxxxxxx yyyyyyyy (onde xxxxxxxx
yyyyyyyy é o endereço em binário de end). Após a leitura do opcode na memória do chip, a CPU
decodifica a instrução e executa a operação indicada.
Depois de apagar o conteúdo da posição de memória end, a CPU busca uma nova
instrução no endereço seguinte da memória e o processo de decodificação e execução é realizado
novamente. A figura 1.15 demonstra os ciclos básicos de execução de uma instrução.
No interior da CPU encontramos normalmente alguns importantes elementos (que variam
de um modelo de CPU para outro): o decodificador de instruções (responsável por decodificar
Introdução
25
cada opcode), o PC (Program Counter - contador de
programa, responsável por controlar a sequência do
programa), a unidade lógica e aritmética (ULA,
responsável pelos cálculos), o registrador
acumulador de resultados, além de outros
registradores de propósitos gerais.
O decodificador de instruções é um circuito
lógico que traduz os opcodes na sequência interna
de microoperações necessárias para realizar a
operação descrita pela instrução.
Algumas CPUs utilizam um decodificador
chamado de hardwired, ao passo que outras utilizam
um decodificador baseado em microcódigos.
Busca instrução na memória
Decodifica a instrução
Escreve o resultado da operação
Figura 1.15 - Ciclos de
execução de uma instrução.
Os decodificadores hardwired são normalmente mais rápidos, pois fazem com que grupos
de bits do opcode selecionem e ativem diretamente as partes da CPU necessárias para a execução
da instrução.
Os decodificadores baseados em microcódigos utilizam máquinas de estado para realizar a
decodificação das instruções, o que os torna normalmente mais lentos e ao mesmo tempo mais
flexíveis que os decodificadores hardwired.
A maioria das CPUs modernas inclui também algum tipo de memória interna. Os
elementos básicos de memória interna são os registradores, geralmente utilizados para o
armazenamento temporário de dados e no controle da operação da CPU. Os registradores mais
importantes em praticamente todas as arquiteturas são o contador de programa (PC) e o
acumulador.
O contador de programa (PC) é um registrador especial responsável pelo controle e
sequenciamento do fluxo do programa. Devido ao fato de ser uma máquina sequencial (na
maioria dos casos), a CPU deve executar uma sequência de instruções armazenadas em algum
tipo de memória. A função do PC é apontar o endereço de memória onde a próxima instrução a
ser executada encontra-se armazenada. A instrução apontada pelo PC é buscada e enviada ao
decodificador seguindo os passos descritos na figura 1.15. Antes de completar a instrução
corrente a CPU automaticamente incrementa o PC de forma que ele aponte sempre o endereço de
memória da próxima instrução.
O acumulador é utilizado principalmente nas operações lógicas e aritméticas. A maioria
das CPUs utiliza o conteúdo do acumulador como um operando nas instruções aritméticas e
lógicas (o outro operando pode ser um registrador ou um valor lido da memória). Como veremos
mais adiante, os RL78 não possuem um registrador acumulador específico, ao invés disso existe
um conjunto de registradores que podem também atuar como acumuladores.
Outro componente importante da CPU é a unidade lógica e aritmética (ULA). Esse
circuito lógico combinacional é utilizado por todas as operações aritméticas e lógicas. Na maioria
dos sistemas, a ULA possui duas entradas (os operandos das operações): uma é geralmente
conectada ao acumulador e a outra, a um registrador ou recebe um valor lido da memória. Os
resultados das operações da ULA são normalmente armazenados no acumulador.
26
Microcontroladores RL78: Guia Básico
Antes de retomarmos o tópico de programação, vejamos a diferença entre
microprocessador e microcontrolador. Em poucas palavras, podemos dizer que microprocessador
é um chip com uma CPU, ULA e circuitos básicos de suporte. Esses chips necessitam de
memórias externas e outros chips para poderem realizar tarefas úteis. Já o microcontrolador é um
chip que integra num mesmo encapsulamento a CPU, ULA, circuitos de suporte, memórias e
periféricos. Um microcontrolador é frequentemente referido como um computador num único
chip.
A aplicação alvo de um microprocessador também é diferente daquela de um
microcontrolador. Enquanto um microprocessador é projetado para ser utilizado em
computadores e dispositivos computacionais (como tablets e smartphones) de uso geral, capazes
de executar programas complexos e sistemas operacionais, um microcontrolador, por outro lado,
é projetado para realizar tarefas específicas e executar programas mais simples (geralmente sem a
necessidade de um sistema operacional).
É cada vez mais complexo estabelecer uma distinção entre microprocessadores e
microcontroladores, pois estes tornam-se mais e mais complexos e muitas vezes
confundem-se com microprocessadores.
Voltando ao tópico de programação, é fácil constatar que a utilização de números binários
e opcodes para escrever um programa pode ser bastante trabalhosa, especialmente porque
dificultam a leitura e o entendimento do código, além de aumentar a probabilidade de erros
(inclusive aqueles oriundos de falhas de digitação). Por isso, ainda na década de 1950 surgiu a
primeira linguagem de programação, o assembly.
Na verdade, a linguagem assembly é somente uma representação simbólica dos opcodes.
Utilizando um programa especial (chamado Assembler ou montador), os mnemônicos assembly
são traduzidos diretamente para códigos binários (opcodes). Essa tradução é feita numa razão de
um para um, ou seja, cada instrução assembly é traduzida em um único opcode.
Sendo assim, para podermos programar uma máquina, é necessário primeiramente
conhecer quais instruções essa máquina é capaz de entender e como utilizá-las corretamente.
Considerando a CPU dos RL78, existem cinco instruções (de um conjunto de oitenta e
uma) que podem ser utilizadas para implementar o programa descrito na listagem 1.1:
CLRB: apaga o conteúdo de um registrador ou endereço da memória.
CMP a,b: compara o conteúdo de uma registrador ou posição da memória (operando
“a”) com o conteúdo do segundo operando (“b”), modificando os bits Z, CY e AY, de acordo
com o resultado (a comparação é feita pela subtração do operando “b” do operando “a”).
INC: adiciona um ao operando.
BR: desvio incondicional para o endereço especificado.
BZ: desvio para o endereço especificado no caso do flag Z = 1.
A figura 1.16 apresenta uma adaptação do fluxograma da figura 1.13 utilizando instruções
assembly do RL78.
Introdução
27
Início
CLRB CNT
CMP CNT,#10
INC CNT
Fim
Figura 1.16
A listagem 1.2 mostra o programa codificado em linguagem assembly. Ele foi escrita com
base em algumas considerações iniciais:
1.
O programa é armazenado a partir do endereço 0x000CE (0x significa que o número
está em hexadecimal). Este é normalmente o endereço inicial da memória flash para
armazenamento de programas nos microcontroladores RL78;
2.
A variável “cnt” está localizada no endereço 0xEF00 da memória, o primeiro
endereço válido da memória RAM no modelo do RL78/G13 utilizado (o R5F100LE);
3.
Utilizaremos o prefixo “N:” para especificar um endereço de 16 bits na memória do
microcontrolador, esta é a notação utilizada pelo compilador IAR para representar o
modo de endereçamento direto de 16 bits (maiores detalhes serão vistos no capítulo
3);
4.
Uma constante (como o valor 10 decimal) é escrita precedida do símbolo #. Este
símbolo indica ao assembler que o valor que o segue é uma constante imediata;
5.
Os endereços e opcodes estão escritos em base hexadecimal.
Analisando o fluxograma da figura 1.16 e a listagem 1.2, podemos entender o
funcionamento do pequeno programa apresentado. É fácil perceber que a instrução CMP possui
um importante papel no controle do programa.
Endereço
Opcode
000CE
F500EF
000D1
000D5
4000EF0A
DD07
000D7
000DA
000DC
A000EF
EFF7
CLRB
repete:
CMP
BZ
INC
BR
final:
Assembly
N:cnt
N:cnt,#10
final
N:cnt
repete
Comentários
Apaga o conteúdo da memória cnt
Compara o valor de cnt com 10 (cnt-10)
Desvia
para
“final”
se
Z=1
(Z=1
comparação anterior cnt era igual a 10)
Incrementa cnt em um
Desvia para “repete”
se
na
Listagem 1.2
28
Microcontroladores RL78: Guia Básico
A instrução “CMP N:cnt,#10” realiza a comparação entre dois valores: o conteúdo da
variável “cnt” e o valor imediato 10 decimal. Observando a coluna dos opcodes, encontramos o
valor 0x4000EF0A, sendo 0x40 o código da instrução, 0x00EF o endereço do operando “cnt” na
memória de dados (o endereço da variável é 0xEF00 e na instrução é escrito em formato little
endian, iniciando pela parte menos significativa) e finalmente a constante com a qual deve ser
feita a comparação (0x0A que é a representação hexadecimal de 10 decimal).
Os termos little endian e big endian são utilizados em computação para especificar
como uma máquina armazena dados numéricos de múltiplos bytes na memória. No
formato little endian tais dados são armazenados na memória sempre iniciando-se
pelo seu byte menos significativo, já no formato big endian, tais dados são
armazenados na sua forma natural, ou seja, iniciando-se pelo byte mais significativo.
Exemplo: o número 0x1234 hexadecimal é armazenado 0x34,0x12 no formato little
endian e 0x12,0x34 no formato big endian!
Observe que a comparação é realizada por meio de uma operação de subtração realizada
no interior da ULA. De acordo com o resultado da comparação (subtração) alguns bits do
registrador PSW são alterados: Z, AC e CY. Se o valor do contador for igual a 10, o bit Z é
setado.
Em seguida, a instrução “BZ final” é o chamado desvio condicional. Este tipo de instrução
avalia uma condição e efetua o desvio do programa caso a condição seja verdadeira. No caso, a
instrução avalia o estado do bit Z (localizado no registrador PSW) e desvia para “final” caso Z=1.
Caso Z=0, a instrução não produz efeito e o programa segue a sua sequência natural.
Note que o opcode da instrução é 0xDD07, onde 0xDD indica a instrução propriamente
dita (BZ) e 0x07 é o endereço de destino do desvio. Nestas instruções o endereço de destino é
escrito relativamente ao endereço da instrução de desvio, ou seja, o valor 0x07 indica que o
endereço de destino é igual ao endereço de BZ (0x000D5) mais o deslocamento 0x07, ou seja,
0x000DC.
A próxima instrução “INC N:cnt” faz o incremento do valor da variável “cnt”, ou seja,
soma um ao conteúdo dela. Novamente podemos perceber que o opcode da instrução é
0xA000EF, onde 0xA0 indica a instrução INC e 0x00EF é o endereço little endian da variável
“cnt”.
A última instrução “BR final” provoca o desvio do fluxo do programa para o endereço
indicado por “repete”, ou seja 0x000D1. O opcode da instrução é 0xEFF7, sendo 0xEF o código
da instrução e 0xF7 o deslocamento do endereço de destino. Observe que neste caso o endereço
de destino está localizado antes da instrução de desvio e por isso o deslocamento é negativo. O
valor de deslocamento é calculado da seguinte forma: 0xD1 (o destino) – 0xDA (endereço onde
está a instrução de desvio) = 0xF7. Note que 0xF7 é a representação em complemento de dois do
número -9 decimal.
Analisando o programa inteiro podemos perceber que inicialmente a variável “cnt” é
iniciada em zero “CLRB N:cnt”, em seguida verificamos se o valor dela é igual a 10 “CMP
N:cnt,#10”, caso negativo “BZ final”, o programa segue, incrementa a variável “INC N:cnt” e em
seguida desvia “BR repete” para uma nova comparação. Quando a comparação da variável com
Introdução
29
10 “CMP N:cnt,#10” resulta verdadeira (Z=1), o desvio condicional “BZ final” é tomado e o
programa desvia para o endereço “final”!
Esta foi apenas uma apresentação rápida da operação de uma CPU e de como uma
sequência de instruções é executada. No decorrer do livro vamos explorar em mais detalhes o
funcionamento de cada instrução dos RL78.
1.4. Microcontroladores RL78
A linha de microcontroladores RL78 da Renesas é derivada da união de duas linhas de
microcontroladores: a linha 78K0R originalmente desenvolvida pela NEC e R8C da Renesas.
Os microcontroladores RL78 são máquinas CISC de 16 bits que possuem como
diferencial a sua alta eficiência, decorrente de duas características importantes das CPUs RL78:
alta velocidade de execução de código (pois utilizam um pipeline de três estágios que faz com
que 56% das instruções sejam executadas em apenas um ciclo de clock) e consumo de energia
extremamente baixo (graças ao design focado principalmente na eficiência energética e a
utilização de tecnologias de semicondutores de baixo consumo de energia), o consumo de
energia, no melhor caso, é de aproximadamente 66µA/MHz.
Um regulador interno de tensão também auxilia na redução do consumo de energia e
permite que os RL78 apresentem níveis muito baixos de emissão eletromagnética (EMI).
Além de consumirem pouca energia quando em operação, a existência dos modos de
baixo consumo de energia halt, stop e snooze permite reduzir grandemente o consumo de energia
quando a CPU não está em operação.
Em termos de performance, os RL78 podem operar até 32MHz, executam a maioria das
instruções em 1 ou 2 ciclos de clock e possuem capacidade de endereçamento de até 1MiB,
permitindo que o fabricante disponibilize grandes quantidades de memória flash e RAM (até
512KiB de flash e até 32KiB de RAM nos modelos mais poderosos lançados até o momento).
A linha de periféricos inclui unidades de temporização TAU onde cada canal de 16 bits
pode atuar praticamente como um timer independente, relógio de tempo real com calendário,
timer de intervalo, timer para controle de motores (até 6 canais de PWM), interfaces de
comunicação serial (síncronas SPI e I2C, assíncronas UART/LIN e USB), conversor A/D de 8, 10
ou 12 bits (com capacidade de varredura de 4 canais), conversor D/A, comparadores analógicos,
controlador de displays LCD, etc.
Praticamente todos os modelos contam com DMA (Direct Memory Access - acesso direto
a memória) de 1 ou 2 canais, que permite automatizar as transferências entre os periféricos e a
memória, dispensando a intervenção da CPU. Além de facilitar a transferência de dados entre a
memória e os periféricos, o DMA também pode auxiliar na redução do consumo de energia
(permitindo fazer transferências enquanto a CPU está em modo halt).
A maioria dos modelos (exceto os G10) possui suporte a divisão e multiplicação, em
alguns modelos por meio de um módulo periférico de hardware, em outros, por meio de
instruções DSP especiais (RL78/G14).
30
Microcontroladores RL78: Guia Básico
Também estão disponíveis periféricos de segurança como, por exemplo, checagem de
erros na memória flash (ECC com CRC) e RAM (paridade), watchdog com janela de tempo,
detector de baixa tensão, detecção de falha de oscilador e de acesso a endereço ilegal da
memória.
A linha RL78 é composta dos seguintes membros:
Modelos de uso geral:
•
RL78/G10 – com versões de 10 e 16 pinos, capacidades de memória flash de 1KiB
até 4KiB e memória RAM de 128 até 512 bytes. Estes microcontroladores possuem
núcleo de 8 bits e operam a até 20MHz, incluem interfaces de comunicação como
UART, SPI e I2C (nos modelos de 16 pinos), conversor A/D de 10 bits, comparador
analógico (nos modelos de 16 pinos) e são os elementos de uso geral e mais baixo
custo da linha RL78. Nestes chips a faixa de tensões de alimentação vai de 2,0 a
5,5V.
•
RL78/G12 - com versões de 20, 24 e 30 pinos, capacidades de memória flash de
2KiB até 16KiB, memória RAM de 256 bytes até 2KiB e dataflash até 2KiB. Estes
microcontroladores operam a até 24MHz, incluem interfaces de comunicação como
UART, SPI e I2C, conversor A/D de 10 bits, DMA (em alguns modelos) e juntamente
com os G10 são os elementos de uso geral e mais baixo custo da linha RL78.
o
•
RL78/G13 - com versões de 20 a 128 pinos, capacidades de memória flash de 16KiB
até 512KiB, memória RAM de 2KiB até 32KiB e dataflash de 4 ou 8KiB. Estes
microcontroladores operam a até 32MHz, incluem múltiplas interfaces de
comunicação como UART, SPI, I2C, conversor A/D de 10 bits, DMA e são voltados
ao uso geral em aplicações de pequena e média complexidade.
o
•
RL78/G1C - com versões de 32 e 48 pinos, capacidade de memória flash de
32KiB, memória RAM de 5,5KiB e dataflash de 2KiB. Estes
microcontroladores operam a até 24MHz e incluem interfaces de
comunicação como UART, SPI, I2C e USB 2.0 full speed (12Mbits/s) capaz
de operar como host ou device e compatível com a versão 1.2 da
especificação de carga de bateria pela porta USB (até duas portas USB
disponíveis).
RL78/G1A - com versões de 25 a 64 pinos, capacidades de memória flash
de 16KiB até 64KiB, memória RAM de 2KiB até 4 KiB e dataflash de 4KiB.
Estes microcontroladores operam a até 32MHz, incluem interfaces de
comunicação como UART, SPI e I2C, DMA e um conversor A/D de 12 bits.
RL78/G14 - com versões de 30 a 100 pinos, capacidades de memória flash de 16KiB
até 256KiB, memória RAM de 2,5KiB até 24KiB e dataflash de 4 ou 8KiB. Estes
microcontroladores operam a até 32MHz, além dos periféricos da linha G13, incluem
instruções DSP para processamento digital de sinais, timer para controle de motores,
D/A de 8 bits e comparador analógico. Eles são os membros mais avançados da linha
RL78 e são voltados ao uso geral em aplicações de média complexidade.
Com controlador de display LCD integrado:
Introdução
31
•
RL78/L12 - com versões de 32 a 64 pinos, capacidades de memória flash de 8KiB
até 32KiB, memória RAM de 1KiB até 1,5KiB e dataflash de 2KiB. Estes
microcontroladores operam a até 24MHz e incluem controladores para displays LCD
com até 280 segmentos (13 a 39 segmentos com 4 planos ou 18 a 35 segmentos com
8 planos).
•
RL78/L13 - com versões de 64 e 80 pinos, capacidades de memória flash de 16KiB
até 128KiB, memória RAM de 1KiB até 8KiB e dataflash de 4KiB. Estes
microcontroladores operam a até 24MHz e incluem controladores para displays LCD
com até 376 segmentos (36 a 51 segmentos com 4 planos ou 32 a 47 segmentos com
8 planos).
Modelos destinados a aplicações específicas:
•
RL78/D1x - com versões de 48 a 100 pinos, capacidades de memória flash de 24KiB
até 256KiB, memória RAM de 2KiB até 16KiB e dataflash de 8KiB. Estes
microcontroladores operam a até 32MHz e incluem controladores para displays LCD
com até 212 segmentos (4 planos com até 53 segmentos), controlador de motor de
passo e gerador de som, são voltados a aplicações de mostradores e painéis
automotivos.
•
RL78/F1x - com versões de 20 a 64 pinos, capacidades de memória flash de 8KiB até
64KiB, memória RAM de 512 bytes até 4KiB e dataflash de 4KiB. Estes
microcontroladores operam a até 32MHz, suportam temperaturas de até 150ºC e são
voltados para aplicações automotivas em dispositivos de carroceria (car body).
•
RL78/I1x - com versões de 20 a 38 pinos, capacidades de memória flash de 32KiB
até 64KiB, memória RAM de 2KiB até 4KiB e dataflash de 4KiB. Estes
microcontroladores operam a até 32MHz, com tensões de alimentação de 2,7 a 5,5V e
incluem controladores PWM para leds , UART com suporte a DALI e DMX512 e são
voltados a aplicações de controle de iluminação e correção de fator de potência.
1.5. Pinagens e Encapsulamentos
Abaixo apresentamos a pinagem de alguns modelos de RL78:
Figura 1.17 – Modelos de 10 pinos (RL78/G10)
32
Microcontroladores RL78: Guia Básico
Figura 1.18 – Modelos de 20 pinos (RL78/G12)
Figura 1.19 – Modelos de 20 pinos (RL78/G13)
Figura 1.20 – Modelos de 30 pinos (RL78/G13)
Introdução
33
Figura 1.21 – Modelos de 64 pinos (RL78/G13)
Pinos especiais:
•
VDD - alimentação positiva (1,6 a 5,5 Volts, nos G10 é de 2,0 a 5,5V)
•
EVDD0 - alimentação positiva (1,6 a 5,5 Volts) para as portas P0, P1, P3, P4, P5, P6, P7 e P14
•
VSS - referência de terra (0 Volt)
•
EVSS0 - referência de terra (0 Volt) para as portas P0, P1, P3, P4, P5, P6, P7 e P14
•
REGC - estabilização do regulador interno (conectar um capacitor de 0,47 a 1µF)
•
RESET - sinal de reset ativo em nível lógico “0”
•
P40/TOOL0 – pino de E/S (bit 0 da porta 4) e pino de programação/depuração (TOOL0)
Cuidado ao utilizar o pino TOOL0 como E/S na aplicação, pois cargas muito elevadas
neste pino podem prejudicar a programação e a depuração do chip no circuito!
34
Microcontroladores RL78: Guia Básico
1.6. R5F100LEA
O microcontrolador objeto de estudo deste livro é o R5F100LEA, um membro da linha
RL78/G13 de microcontroladores da Renesas. Ele inclui uma CPU RL78, além de 64kibibytes de
memória flash, 4.096 bytes de memória RAM e 4.096 bytes de memória dataflash. Este chip
pode operar a até 32MHz e a tensão de alimentação pode ir de 1,6 a 5,5 Volts.
Além das características gerais dos RL78/G13, o R5F100LEA inclui também:
•
58 pinos de entrada/saída, divididos em 11 portas de entrada/saída (E/S): P0, P1, P2,
P3, P4, P5, P6, P7, P12, P13 e P14;
•
Diversos pinos podem ser configurados para operar como saídas dreno aberto e
podem fazer interface com outros níveis de tensão (desde que dentro da faixa de 1,6 a
5,5V);
•
Seis pinos de interrupção externa, com borda de sensibilidade configurável;
•
Oito pinos de interrupção de teclado (geram interrupção ao mudar de estado);
•
Quatro diferentes periféricos de temporização:
o Duas unidades de temporização TAU, cada uma com 8 canais (total de 16
canais). Cada canal do TAU pode operar como um timer independente ou ser
utilizado em conjunto com outros canais. Os canais dos TAU podem fazer
captura de sinais (medição de período), comparação (geração de interrupção ou
sinais de largura definida), PWM, etc.
o Relógio de tempo real com calendário e interrupção de alarme, que pode operar
com clock externo de 32768Hz ou com clock interno de 15kHz;
o Timer de interrupção periódica (12 bits) que pode ser utilizado para criar bases de
tempo;
o Watchdog programável com operação em “janela de tempo”.
•
Dois tipos de interface de comunicação (até 7 portas seriais simultâneas):
o Duas unidades seriais SAU, que podem operar no modo SPI de 3 fios, UART ou
I2C simplificado* (a SAU0 pode operar como 4 canais SPI/I2C ou 2 canais
UART, a SAU1 pode operar como 2 canais SPI/I2C ou 1 canal UART com
suporte a LIN);
o Uma unidade I2C completa.
A interface I2C simplificada não pode operar no modo escravo e nem suporta o modo multimaster.
•
Conversor A/D de 10 bits com 12 canais de entrada, taxa de conversão de até 470ksps
(mil amostras por segundo), varredura de até 4 canais, comparador digital interno e
capacidade de operação em modo snooze;
•
Quatro canais de DMA, cada canal pode transferir blocos de até 1024 bytes ou words
(um byte ou word a cada disparo).
Introdução
35
1.7. Kits e Ferramentas de Programação
A Renesas possui uma série de kits disponíveis para facilitar o aprendizado e
desenvolvimento de aplicações com o RL78.
O kit mais acessível é o YRPBRL78G13, também chamado de “Promotion Board” do
RL78/G13. Este kit consiste numa PCI contendo um R5F100LEA e um microcontrolador
78F0730, que atua como programador e depurador USB.
Figura 1.22 – YRPBRL78G13
A placa possui também dois leds, um cristal de 32.768Hz conectado ao oscilador
secundário do RL78, um trimpot, duas fileiras de pads conectados aos pinos de E/S do chip e um
conector para programação do RL78 através de um programador E1 externo. Também existem
jumpers que podem ser utilizados para medição do consumo de corrente do chip.
A figura 1.23 mostra as conexões das duas fileiras de 30 pinos nas bordas da placa (o pino
1 é indicado na borda da placa).
Não conectado
P30
P05
P06
P147
P146
P137
P41
P42
P43
P120
T_RESET
P27
P26
P25
P24
P23
(conectado ao trimpot R15) P22
AVREFM
AVREFP
P130
P04
P03
P02
P01
P00
P141
P140
VDD
GND
Não conectado
P70
P71
P72
P73
P74
P75
P76
P77 (conectado ao LED D2)
P31
P63
P62
P61
P60
P50
P51
P52
P53
P54
P55
P17
P16
P15
P14 (recebe dados da COM virtual)
P13 (transmite dados para a COM virtual)
P12
P11
P10
VDD
GND
Conector E1
Figura 1.23
36
Microcontroladores RL78: Guia Básico
Para desenvolvimento de aplicações mais avançadas o “Starter kit” ou RSK do RL78/G13
inclui 4 leds, 3 teclas de usuário, módulo de display LCD de 8 caracteres por 2 linhas, cristal de
20MHz e de 32.768Hz, conector para depurador E1, porta serial DB9 e interface LIN. O kit
inclui um depurador E1 que pode ser utilizado para programar e depurar qualquer
microcontrolador RL78, RX e alguns modelos do R8C, 78K e V850.
Figura 1.24 – Starter kit do RL78/G13
Figura 1.25 – Depurador/programador E1
Outro kit bastante interessante e que inclui uma quantidade de periféricos muito maior que
os anteriores, é o “Demonstration kit” do RL78/G14. Ele utiliza um microcontrolador
R5F104PJA (256KiB de flash, 8KiB de dataflash e 24KiB de RAM num encapsulamento de 100
pinos) e inclui diversos periféricos interessantes na placa: módulo Wi-Fi GainSpan GS1011,
display LCD TFT gráfico de 1,5 polegadas, display Eink com seis segmentos, conector para
cartão MicroSD, acelerômetro de 3 eixos, sensor de temperatura, EEPROM I2C de 512kib,
memória flash SPI de 8Mib (conectada ao módulo Wi-Fi), sensor de luz, microfone, alto falante,
sensor de IR, led IR, conector serial DB9, treze leds de usuário, 4 teclas (1 reset), potenciômetro,
FET com conector externo, TRIAC isolado com conector externo, portas de expansão e
depurador TK integrado com conector USB.
Figura 1.26 – Demonstration kit do RL78/G14
Introdução
37
1.8. Convenções Utilizadas
No decorrer deste livro utilizamos algumas convenções para representação de símbolos,
nomes e outros termos técnicos:
•
Este livro utiliza as unidades de informação padronizadas pela Comissão
Internacional de Eletrotécnica (IEC) em 2000, as quais foram criadas para ajudar na
diferenciação entre os padrões decimais (utilizados no cotidiano) e os padrões
binários (utilizados para representar grandezas binárias, comuns no mundo da
computação digital):
Prefixo Padrão
(Sistema Internacional)
Prefixo Símbolo
Peso
Kilo
k
103
6
Prefixo Binário
(Sistema Internacional)
Prefixo Símbolo
Peso
kibi
Ki
210
mebi
Mi
220
Mega
M
10
Giga
G
109
gibi
Gi
230
Tera
T
10
12
tebi
Ti
240
Peta
P
1015
pebi
Pi
250
E
18
exbi
Ei
260
Exa
10
Tabela 1.5
Note que 1024 bytes são 1KiB e 1024 bits são 1Kibit!
38
•
Referências a nomes de bit e nomes de registrador são feitas sempre utilizando letras
maiúsculas.
•
As referências aos nomes dos bits são feitas sempre utilizando o nome ou a
associação do nome do registrador e o nome do bit no seguinte formato:
REGISTRADOR.BIT. Assim, a referência ao bit Z do registrador PSW pode ser
feita apenas ao nome do bit (Z) ou PSW.Z.
•
Para representar genericamente um conjunto de registradores ou bits pertencentes a
um periférico ou registrador, utilizamos a letra “x” minúscula. Assim, o termo Px
representa qualquer um dos seguintes registradores: P0, P1, P2, etc. No caso dos
timers, TAUx poderá significar TAU1 ou TAU0 e assim por diante.
•
Os símbolos C utilizados neste livro são aqueles definidos e fornecidos pela IAR. Os
registradores e bits específicos que podem ser manipulados diretamente pelo código
em C estarão sempre grafados em letras maiúsculas. Os símbolos escritos com a
primeira letra minúscula “b” referem-se aos bits dos registradores e somente devem
ser utilizados nas operações envolvendo registradores. Por exemplo: para se setar o
bit RTCEN (registrador PER0) é possível escrever RTCEN = 1 (uma operação de
manipulação direta de bit) ou ainda PER0 = bRTCEN (uma operação de escrita de 8
bits no registrador). Os símbolos bXXXX estão definidos no arquivo myRL78.h.
Microcontroladores RL78: Guia Básico
•
No decorrer do texto, as palavras reservadas da linguagem C estão escritas em
negrito.
•
As notas importantes são apresentadas utilizando a seguinte caixa de texto:
Esta é uma nota importante!
As dicas de utilização utilizam a seguinte caixa de texto:
•
Esta é uma dica!
•
Os registradores do microcontrolador são representados por figuras como a mostrada
a seguir:
Registrador LVIM (Exemplo)
Nome
BIT 7
Leitura
LVIM
Escrita
Reset
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
LVISEN
0
0
0
0
0
0*
0
0
0
0
0
BIT 1
BIT 0
LVIOMSK
LVIF
0
0
0*
0*
* Após um reset LVD este registrador não é alterado.
Nome do Bit
Descrição
LVISEN
Controle de escrita no registrador LVIS:
0 – escrita desabilitada (não produz efeito)
1 – escrita habilitada
LVIOMSK
Máscara de estado de saída do LVD:
0 – LVD operando normalmente
1 – LVD em estabilização
LVIF
Indicador de status do LVD:
0 – tensão (VDD) ≥ valor configurado (VLVD) (ou quando o
LVD está desligado)
1 – tensão (VDD) < valor configurado (VLVD)
Bit C
Símbolo C
LVISEN
bLVISEN
LVIOMSK
bLVIOMSK
LVIF
bLVIF
Vejamos como ler a tabela:
Existem três linhas rotuladas “Leitura”, “Escrita” e “Reset”. A primeira e a segunda linhas
indicam a função de cada bit na sua leitura e escrita respectivamente. A linha “Reset” indica o
estado de cada bit após um reset.
Os bits 0 e 1 deste registrador são do tipo “somente leitura”, o que significa que eles
somente podem ser lidos pelo software, mas não modificados por ele.
A leitura do bit 0 do registrador retorna o estado do bit LVIF, mas a escrita no mesmo não
produz efeitos. Da mesma forma, a leitura do bit 1 retorna o estado do bit LVIOMSK, mas a
escrita não produz efeitos.
Os bits 2 a 6 não são implementados e a leitura deles retorna sempre o valor “0”.
Normalmente se recomenda escrever somente “0” nos bits não implementados. Alguns bits
Introdução
39
podem apresentar um “?” no seu estado de reset. Isso significa que ele não é alterado após um
reset.
O bit 7 (LVISEN) pode ser lido ou escrito pelo software.
Desta forma, supondo que o registrador LVIM possua o valor 0x00, após a seguinte linha
de código:
LVIM = 0x81;
O registrador irá conter o valor 0x80 (já que o bit 0 não é alterado pelo programa).
Observe que os símbolos definidos na coluna “Bit C” estão incluídos nos headers do chip
e são fornecidos juntamente com o compilador (pasta include dentro da pasta onde foi instalado o
compilador IAR).
Cada modelo de microcontrolador possui dois arquivos header com as definições dos seus
registradores SFR e GPR: o arquivo “ior5f10xxx.h” para os SFR principais e “ior5f10xxx_ext.h”
para o conjunto de registradores estendido.
No caso do microcontrolador utilizado neste livro (R5F100LE) os arquivos header são
"ior5f100le.h" e "ior5f100le_ext.h".
Os símbolos mostrados na coluna “Símbolo C” estão definidos no arquivo “myRL78.h”
que pode ser baixado juntamente com os projetos deste livro.
40
Microcontroladores RL78: Guia Básico
2
Ferramentas de Programação
2. Ferramentas de Programação
2.1. O Ambiente Embedded Workbench EWRL78
O ambiente IAR Embedded Workbench for RL78 (EWRL78) é um IDE que integra
editor, compilador, assembler, linker, simulador e depurador em um único software.
Os leitores dos livros “MSP430: Teoria e Prática” e “Tecnologia ARM:
Microcontroladores de 32 bits” irão perceber que o EWRL78 (como é chamado o Embedded
Workbench para os RL78) é muito semelhante ao EW430 e EWARM. Esta identidade de
ambientes é sem dúvida uma vantagem para os desenvolvedores que necessitam trabalhar com
múltiplas plataformas, pois o tempo gasto com a familiarização com a ferramenta de
programação é amplamente reduzido.
2.1.1. Criando o Primeiro Projeto
No decorrer deste tópico o leitor poderá aprender como configurar corretamente o
ambiente EWRL78 (versão 1.20) e a criação de um projeto em linguagem C.
Para criar um novo projeto no IAR, é necessário selecionar a opção “Create a New
Project” dentro do menu principal.
Figura 2.1A
Figura 2.1B
Em seguida, devemos selecionar a linguagem de programação a ser utilizada no projeto.
Nos exemplos deste livro, utilizaremos a linguagem C, por isso, a seleção deve ser feita conforme
a figura 2.1A. Uma vez selecionada a linguagem é necessário dar um nome ao projeto, conforme
demonstra a figura 2.1B.
Ferramentas de Programação
41
Feito isso, teremos uma tela igual a representada na figura 2.2. Nela encontramos a janela
do workspace atual (2), a janela de edição de código fonte (3) e a janela de mensagens da IDE (4)
e a seleção do modo do projeto (1).
1
3
2
4
Figura 2.2
O projeto inclui um arquivo genérico “main.c” que consiste no mínimo de código
necessário a um programa em C, ou seja, apenas a função principal (main).
Vencida esta etapa é necessário configurar o projeto. Para isso, selecione a opção Project
> Options... no menu principal ou, alternativamente, pressione as teclas ALT+F7, ou ainda,
pressione o botão direito do mouse sobre a janela do workspace e selecione a opção Options no
menu flutuante. A janela de opções (figura 2.3) será exibida.
As configurações de projeto feitas para o modo “Debug” (item 4 da figura 2.2) deverão
ser feitas também para o modo “Release”. O modo “Debug” é útil durante a fase de
desenvolvimento e testes da aplicação, ao passo que a o modo “Release” é utilizado para geração
do código final (normalmente um arquivo .hex para gravação em produção).
Nesta janela, o programador irá selecionar o modelo de RL78 utilizado (no campo
Device), além do modelo de memória a ser utilizado para o código (Code model) e dados (Data
model) e como as constantes “near” serão colocadas na memória.
Modelos “near” utilizam apenas um segmento de 64KiB de memória, ao passo que
modelos “far” utilizam todo o espaço de 1MiB de endereçamento. Preferencialmente devemos
utilizar modelos “near”, pois eles geram códigos menores e mais rápidos que os gerados com
modelos “far”.
42
Microcontroladores RL78: Guia Básico
Pressione este
botão para
selecionar a
CPU
Figura 2.3
Ainda na categoria “General Options”, clique na aba “Library Configuration”. Ali é
possível selecionar o tipo de biblioteca padrão C que será utilizada com o projeto (“Normal
DLIB”, “Full DLIB” ou “Custom”) e também é possível selecionar se o compilador deve ou não
utilizar o hardware de multiplicação integrado (“Use hardware multiplier/divider unit”). Esta
opção, ao ser selecionada, faz com que o compilador inclua uma pequena biblioteca (cerca de
260 bytes) que faz com que o multiplicador/divisor por hardware seja utilizado para acelerar as
operações de divisão e multiplicação.
Cabe ao programador decidir sobre a necessidade ou não de se utilizar o hardware
multiplicador/divisor interno, mas via de regra, se você tiver 260 bytes de flash sobrando, os
benefícios em termos de ganho de velocidade valem o espaço adicional necessário.
Além das configurações da categoria “General Options” é importante também
configurarmos outras opções. Na categoria “C/C++ compiler”, verifique a aba “Output” e
certifique-se de que a opção “Generate debug information” esteja selecionada. Esta opção faz
com que o compilador gere informações adicionais necessárias à depuração do programa.
Na aba “Optimizations” é possível configurar algumas opções de otimização de código.
Por hora não iremos nos preocupar com isso, mas para produção de código final, é importante
utilizar a otimização máxima do compilador (“level high”). Note que é possível otimizar o
programa para ocupar menos espaço (Optimize for space), para ser executado mais rapidamente
(optimize for speed) ou para a melhor relação custo/benefício entre velocidade e tamanho
(balanced).
Na categoria “Linker”, aba “Output”, é importante que a opção “Debug information for CSPY” esteja selecionada. Ela é responsável por gerar código de depuração necessário para que a
ferramenta C-SPY possa funcionar corretamente.
Ferramentas de Programação
43
Ainda na categoria “Linker” é possível selecionar outro arquivo de configuração do
linker. Isto é necessário quando se necessita modificar a forma como o linker utiliza e distribui
código e dados na memória do microcontrolador. Um exemplo típico é o uso das bibliotecas
FSL, FDL ou EEL para armazenamento de dados na flash, todas elas necessitam de modificações
na configuração do linker para poder operar corretamente.
Adicionalmente, pode ser interessante configurar o linker para gerar um arquivo de
informações sobre a utilização e alocação da memória. Para isso, basta selecionar a aba “List” e
habilitar a opção “Generate linker listing”.
O arquivo .map gerado irá conter diversas informações acerca da distribuição das funções
e símbolos na memória do chip. Também é possível verificar a quantidade de memória flash e
RAM utilizada.
Seleção do
depurador a
ser utilizado
pelo EWRL78
Figura 2.4
Finalmente, o último passo para configuração do projeto consiste em selecionar o tipo de
depurador a ser utilizado. Esta seleção será realizada conforme o tipo de hardware de depuração
disponível. Normalmente iremos optar entre o simulador e um depurador externo como o TK ou
E1.
A opção pelo simulador (figura 2.4) pode ser interessante para se testar trechos de código,
desde que estes não utilizem nenhum periférico dos RL78, pois o simulador da IAR não simula
periféricos internos do microcontrolador.
Uma vez que o projeto esteja configurado, podemos nos dedicar ao programa
propriamente dito. Assim, o arquivo “main.c” do projeto recém criado deve ser alterado
conforme a listagem do exemplo 2.1. Este programa exemplo irá fazer com que o led da placa de
demonstração do RL78 pisque.
#include
#include
#include
#include
"ior5f100le.h"
"ior5f100le_ext.h"
"intrinsics.h"
"myRL78.h"
// Configura watchdog = desligado
#pragma location = "OPTBYTE"
__root __far const char opbyte0 = WDT_OFF;
// Configura detector de baixa tensão = desligado
#pragma location = "OPTBYTE"
44
Microcontroladores RL78: Guia Básico
__root __far const char opbyte1 = LVD_OFF;
// oscilador 32MHz flash high speed
#pragma location = "OPTBYTE"
__root __far const char opbyte2 = FLASH_HS | CLK_32MHZ;
// debug ativado, com apagamento em caso de falha de autenticação
#pragma location = "OPTBYTE"
__root __far const char opbyte3 = DEBUG_ON_ERASE;
/* Configura security ID */
#pragma location = "SECUID"
__root __far const char senha[10] = {0,0,0,0,0,0,0,0,0,0};
#define LED_D2
P7_bit.no7
unsigned long int temp, cnt;
void main( void )
{
PM7_bit.no7 = 0; // porta P77 como saída
cnt = 0;
while (1)
{
LED_D2 = 1;
for (temp=100000;temp;temp--);
LED_D2 = 0;
for (temp=100000;temp;temp--);
cnt++;
}
}
Exemplo 2.1 – Pisca led por software
Uma vez que o programa tenha sido digitado (ou carregado) corretamente, a aparência do
IDE deve ser próxima a da figura 2.5. Podemos então passar a etapa de compilação e depuração.
Para proceder à compilação e montagem completa do projeto, basta clicar no botão
MAKE indicado na figura 2.5. O IDE irá automaticamente compilar e “linkar” o programa,
gerando os arquivos binários conforme selecionado nas opções do projeto. O mesmo efeito pode
ser obtido pressionando-se a tecla F7 ou selecionando-se a opção Project>Make no menu
principal.
DEBUG
Depurar o
projeto atual
MAKE
Compilar o
projeto atual
Figura 2.5
Ferramentas de Programação
45
Após o processo, a janela de mensagens da IDE estará mostrando, na aba Build, as
mensagens emitidas pelo compilador e pelo linker. Caso a mensagem exibida seja diferente de
“Total number of errors: 0” e “Total number of warnings: 0”, verifique o código digitado a
procura de erros.
2.1.2. Simulando um Programa
Após termos compilado o programa, podemos passar ao teste do mesmo. Primeiramente
iremos testar o programa utilizando o simulador do EWRL78.
Para isso é necessário selecionar a opção simulator na janela de opções do projeto
conforme a figura 2.4.
Pressionando-se o botão DEBUG (figura 2.5), poderemos dar início a uma sessão de
depuração utilizando o simulador.
Após pressionar o botão DEBUG, a tela do IDE deverá passar a ser aquela da figura 2.6.
Botões do
depurador
Go to
Janela de
disassembly
Figura 2.6 – Depurador do EWRL78
Repare que a janela de mensagens apresenta informações na aba Debug Log, informando
que o download foi completado e que o Target (dispositivo alvo, que no caso é o simulador) foi
ressetado.
Além disso, temos uma nova janela (Disassembly) e uma barra de botões do depurador.
A janela Disassembly apresenta uma visão da memória de programa do chip, incluindo os
endereços de memória, o conteúdo hexadecimal e a instrução assembly correspondente.
Permeando as instruções assembly encontramos linhas de código C: as instruções seguintes a
cada linha de código C representam as instruções necessárias para executar a tarefa determinada
pela linha de código de alto nível.
46
Microcontroladores RL78: Guia Básico
O campo “Go to” permite visualizar o código a partir de um endereço específico, por
exemplo: se o programador desejar visualizar o código a partir do endereço 0x2000, basta entrar
com este valor no campo “Go to” e pressionar a tecla ENTER.
As linhas destacadas em fundo verde representam o próximo comando/instrução a ser
executado
A barra de botões do depurador permite controlar a execução do programa: estão
disponíveis botões para executar o programa, paralisar a execução, execução passo a passo,
criação de breakpoints, etc. A figura 2.7 apresenta a função de cada um dos botões.
Saída do modo de depuração;
Executa o programa até um ponto de parada (breakpoint) ou o término do programa
(tecla F5);
Executa o programa até o ponto em que se encontra o cursor;
Pula para o próximo comando (o atual é executado sem visualização no depurador)
(tecla F10);
Executa o programa até o término da função atual (teclas SHIFT + F11);
Executa a próxima instrução ou comando (passo a passo) (tecla F11);
Executa a próxima instrução ou comando (se for uma chamada de função, ela é
inteiramente executada e o controle retorna para a instrução seguinte à chamada);
Para a execução do programa;
Reset do processador.
Figura 2.7 – Botões de controle do depurador
Utilizando a execução passo a passo (tecla F10), podemos acompanhar exatamente o que
ocorre com a CPU RL78 durante a execução dos comandos C ou das instruções assembly.
Observe que se a janela selecionada for a disassembly, a execução passo a passo do
programa será feita instrução por instrução assembly. Se a janela selecionada for a do código
fonte em C, a execução do programa será de comando por comando C.
Além de executar o programa é possível visualizar o estado dos registradores da CPU e
dos periféricos, além do conteúdo das variáveis e da memória.
Para visualizar o conteúdo dos
registradores é necessário selecionar a opção
View > Register no menu principal. Isto fará
com que a janela Register (figura 2.8) seja
apresentada na tela.
A janela “Register” pode ser utilizada
para visualizar e alterar o conteúdo tanto dos
registradores da CPU (conforme mostra a
figura 2.8) como de qualquer registrador de
periféricos. Para selecionar o conjunto de
registradores a ser apresentado, basta utilizar a
caixa drop-down localizada no topo da janela.
Ferramentas de Programação
Seleção do conjunto
de registradores a
ser visualizado
Contadores de
ciclos
Figura 2.8 – Janela de registradores
47
Agora que já vimos os procedimentos para execução do programa, o próximo passo é
visualizarmos o conteúdo das variáveis. No presente caso, iremos nos limitar a visualizar as
variáveis globais “temp” e “cnt”. Para isso, basta selecionar a opção View > Statics no menu
principal, o que irá fazer com que a janela da figura 2.9A seja apresentada.
Figura 2.9A
Figura 2.9B
Repare que estão listados outros símbolos globais, como os bytes de opção (option bytes)
e a variável “temp”, que aparece na última linha. Também são apresentados os endereços onde os
símbolos estão armazenados. No caso da variável “temp”, o endereço da mesma é 0xFEF00.
Caso necessário, também é possível alterar o formato de visualização da variável, bastando clicar
com o botão direito do mouse sobre a mesma e no menu flutuante selecionar a opção desejada
(figura 2.9B).
Também é possível alterar o valor de qualquer variável, basta clicar sobre ela e digitar o
novo valor seguido da tecla ENTER.
Uma outra possibilidade interessante é a janela de visualização em tempo real “Live
Watch”, ela permite que se acompanhe a alteração do conteúdo das variáveis em tempo real, ou
seja, durante a execução do programa. Selecionando a opção View > Live Watch no menu
principal será apresentada uma janela similar a da figura 2.10A, onde podem ser inseridas as
variáveis cujo conteúdo se deseja visualizar em tempo real.
Figura 2.10A
Figura 2.10B
Por padrão, o conteúdo da janela “Live Watch” é atualizado a cada segundo (1000ms),
mas este valor pode ser modificado na janela de opções da IDE (Tools > Options no menu
principal). A figura 2.10B mostra esta janela e o campo para alteração do intervalo de atualização
da janela “Live Watch”.
Outra característica importante é a criação de breakpoints (pontos de parada) que são
utilizados para interromper a execução do programa. Os breakpoints permitem que o
48
Microcontroladores RL78: Guia Básico
programador possa paralisar o programa em um determinado ponto ou no instante em que uma
determinada condição ocorra (breakpoints condicionais).
Primeiramente, iremos criar um breakpoint de código, que consiste em marcar uma
determinada linha de código ou um endereço de memória que ao ser atingido, a execução do
programa é suspensa. Para fazer isso, basta um duplo-clique na área cinza que precede a linha de
código na janela do código fonte.
A título de exemplo, sugerimos que se dê um duplo-clique na linha de programa indicada
como breakpoint 1 na figura 2.11.
Ao fazer isso, surgirá um círculo vermelho em frente a linha, indicando que a mesma
possui um breakpoint ativo.
Antes de prosseguirmos com os testes é interessante que o leitor habilite a janela de
breakpoints, de forma a poder visualizar e selecionar os breakpoints marcados. Para fazer isso,
basta selecionar a opção View > Breakpoints no menu principal.
Breakpoint
1
Breakpoint 2
Janela de breakpoints
Figura 2.11 – Breakpoints
Uma vez que tenha marcado o breakpoint e ativado a janela de breakpoints, a aparência do
IDE deve ser aproximadamente igual a da figura 2.11.
Se o leitor desejar, poderá iniciar a execução do programa pressionando a tecla F5 e verá
que o programa será executado até encontrar o ponto marcado como breakpoint 1 na figura 2.11.
Até aqui, nada mais fizemos do que criar breakpoints de código. No entanto, podemos
adicionar inteligência ao mesmo: clique com o botão direito do mouse sobre a variável “temp” no
código fonte, no menu que irá surgir (figura 2.12A), selecione a opção “Set Data Breakpoint for
‘temp’”. Um novo breakpoint será adicionado na janela de breakpoints (figura 2.12B).
Ferramentas de Programação
49
Figura 2.12A
Figura 2.12B
Figura 2.12C
Clicando-se com o botão direito do mouse sobre o data breakpoint na janela de
breakpoints e selecionando-se a opção “Edit” será apresentada a janela da figura 2.12C, na qual é
possível preencher a condição desejada para que o programa seja interrompido (no caso o
programa irá parar quando “temp” atingir o valor 10000).
Se o programa for executado (tecla F5), o leitor poderá observar que a execução será
paralisada na linha do comando for e no mesmo instante, a janela de visualização das variáveis
estáticas estará indicando que a variável “temp” possui o valor 10000, exatamente o que seria de
se esperar. Desta forma, criamos um breakpoint condicional.
Finalmente é importante saber que é possível desabilitar temporariamente um breakpoint.
Para isso, basta clicar sobre a marca em frente ao mesmo na janela de breakpoints. Um
breakpoint desabilitado é representado como um círculo vermelho preenchido de branco.
Uma característica interessante do simulador é a disponibilidade de dois contadores de
ciclos (CCTIMER1 e CCTIMER2), que podem ser utilizados para se efetuar medições do tempo
de execução do programa ou de trechos do mesmo, inclusive com a possibilidade de alterar o
conteúdo dos mesmos de forma a facilitar as medições. Estes contadores estão disponíveis na
janela de visualização de registradores da CPU do simulador.
As figuras 2.13 e 2.14 demonstram a utilização do contador de ciclos para medição do
intervalo de tempo transcorrido durante uma chamada à função atraso no nosso programa
exemplo.
Na figura 2.13, o CCTIMER1 foi zerado manualmente antes de executar o comando for.
Figura 2.13
A figura 2.14 mostra o conteúdo do CCTIMER1 após a execução do laço for. Observe
que o conteúdo do mesmo é apresentado em vermelho, indicando que o mesmo foi alterado desde
o último comando do depurador.
50
Microcontroladores RL78: Guia Básico
Download