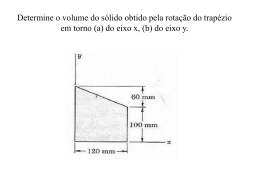
1 Engenharia da Computação 4º / 5° Semestre RESISTÊNCIA DOS MATERIAIS – APOSTILA 01 Prof Daniel Hasse Características Geométricas de Figuras Planas SÃO JOSÉ DOS CAMPOS, SP Mecânica dos Materiais 5 Ricardo Gaspar 44 CARACTERÍSTICAS GEOMÉTRICAS DE FIGURAS PLANAS O dimensionamento e a verificação da capacidade resistente de barras, como de qualquer elemento estrutural dependem de grandezas chamadas tensões, as quais se distribuem ao longo das seções transversais de um corpo. Daí vem a necessidade de se conhecer claramente as características ou propriedades das figuras geométricas que formam essas seções transversais. A Figura abaixo ilustra uma barra reta de seção transversal constante, chamada barra prismática. O lado da barra que contém o comprimento (L) e a altura (h) é chamado de seção longitudinal e o que contém a largura (b) e a altura (h) é chamado de seção transversal. h h L b seção longitudinal seção transversal L h b Figura 5.1 Barra prismática As principais propriedades geométricas de figuras planas são: Área (A) Momento de Inércia (I) Momento estático (M) Módulo de resistência (W) Centro de gravidade (CG) Raio de giração (i) 5.1 Área A área de uma figura plana é a superfície limitada pelo seu contorno. Para contornos complexos, a área pode ser obtida aproximando-se a forma real pela justaposição de formas geométricas de área conhecida (retângulos, triângulos, etc). A unidade de área é [L]2 (unidade de comprimento ao quadrado). A área é utilizada para a determinação das tensões normais (tração e compressão) e das tensões de transversais ou de corte. Mecânica dos Materiais 5.2 Ricardo Gaspar 45 Momento Estático Analogamente à definição de momento de uma força em relação a um eixo qualquer, defini-se Momento Estático (M) de um elemento de superfície como o produto da área do elemento pela distância que o separa de um eixo de referência. y dA x y M x = y ⋅ dA e M y = x ⋅ dA x y Momento Estático de uma superfície plana é definido como a somatória de todos os momentos estáticos dos elementos de superfície que formam a superfície total. A y M x = ∫ ydA e M y = ∫ xdA A dA x A A unidade do Momento Estático é área é [L]× [L]2 = [L]3. x O Momento Estático é utilizado para a determinação das tensões transversais que ocorrem em uma peça submetida à flexão. O Momento Estático de uma superfície composta por várias figuras conhecidas é a somatória dos Momentos Estáticos de cada figura. Exemplo: determinar o Momento Estático das figuras abaixo A1 CG 1 M 1, x = yCG1 ⋅ A1 2 M 2, x = yCG 2 ⋅ A2 CG 2 1 A 2 y CG M 3, x = yCG 3 ⋅ A3 y CG CG y CG A3 3 M x = M 1, x + M 2, x + M 3, x 3 x Elemento vazado 1 2 M x = M 1, x − M 2, x Mecânica dos Materiais 5.3 Ricardo Gaspar 46 Centro de Gravidade Se um corpo for dividido em partículas mínimas, estas ficam sujeitas à ação da gravidade, isto é, em todas estas partículas está aplicada uma força vertical atuando de cima para baixo. A resultante de todas estas forças verticais e paralelas entre si, constitui o peso do corpo. Mesmo mudando a posição do corpo aplicando-lhe uma rotação, ele permanecerá sempre sujeito à ação da gravidade. Isto significa que as forças verticais girarão em relação ao corpo, mas continuaram sempre paralelas e verticais. O ponto onde se cruzam as resultantes dessas forças paralelas, qualquer que seja a posição do corpo, chama-se Centro de Gravidade (CG). Portanto, atração exercida pela Terra sobre um corpo rígido pode ser representada por uma única força P. Esta força, chamada peso do corpo, é aplicada no seu baricentro, ou cento de gravidade (CG). O centro de gravidade pode localizar-se dentro ou fora da superfície. y x CG CG y CG O centro de gravidade de uma superfície plana é, por definição, o ponto de coordenadas: xCG My 1 = = ∫ x ⋅ dA A AA x yCG M 1 = x = ∫ y ⋅ dA A AA onde: xCG = distância do CG da figura até o eixo y escolhido arbitrariamente; yCG = distância do CG da figura até o eixo x escolhido arbitrariamente; Mx = momento estático da figura em relação ao eixo x; My = momento estático da figura em relação ao eixo y; A = área da Figura. Centro de gravidade de áreas compostas por várias figuras O centro de gravidade de uma superfície composta por várias figuras, é expresso por: y n A xn n xCG = ∑A ⋅x i n ∑A i i =1 A1 x1 i i =1 n yn y1 yCG = x ∑A ⋅y i i =1 n ∑A i =1 i i Mecânica dos Materiais Ricardo Gaspar 47 Centro de gravidade de algumas figuras planas retângulo y x CG xCG = b 2 yCG = h 2 CG h y CG x b triângulo y b 3 h = 3 xCG = h CG yCG y CG x x CG b círculo y xCG = 0 CG yCG = 0 x Semicírculo r r CG 4R ___ 3 π ¼ de círculo 4R ___ 3 π r CG yCG = 4r 3π xCG = 4r 3π yCG = 4r 3π 4R ___ 3 π trapézio y h1 = h a + 2b ⋅ 3 a+b h2 = h 2a + b ⋅ 3 a+b h2 CG h1 x Mecânica dos Materiais Ricardo Gaspar 48 Exemplos 1. Determinar o centro de gravidade CG do retângulo dA em relação ao eixo x que passa pela sua base. dy Área do retângulo A = b ⋅ h h O Momento Estático do retângulo em relação ao eixo x é somatória do produto de cada elemento de área dA pela sua distância em relação ao eixo x. x b Momento Estático Centro de Gravidade dA = b ⋅ dy h y CG M x = ∫ y ⋅ dA = ∫ y ⋅ b ⋅ dy 0 2 Mx = b⋅h 2 2 2. Determinar o CG da Figura. yCG = 2 h 2 1 (medidas em centímetros) 2 6 A = A1 − A2 − A3 1 2 A = 84 cm 2 2 15 A = (8 × 15) − (6 × 4 ) − (4 × 3) y CG = 10 h b ⋅ y b⋅h b ⋅0 Mx = = − 2 2 2 0 2 y CG = 7,5 A b ⋅ h2 M h = x = 2 = A b⋅h 2 2 3 y CG = 3,5 3 3 2 M 1, x = yCG1 ⋅ A1 = 7,5 × (8 ×15) = 900 cm 3 M 2, x = yCG 2 ⋅ A2 = 10 × (6 × 4 ) = 240 cm 3 M 3, x = yCG 3 ⋅ A3 = 3,5 × (3 × 4 ) = 42 cm 3 M x = M 1, x − M 2, x − M 3, x = 900 − 240 − 42 = 618 cm 3 yCG = M x 618 cm 3 = = 7,36 cm A 84 cm 2 4 2 x Mecânica dos Materiais Ricardo Gaspar 49 3. Determinar o centro de gravidade da figura hachurada. A1 = (12 × 8) = 96 cm 2 A2 = (3 × 3) = 9 cm 2 3 1 2 A = A1 − A2 = 87 cm 2 5,69 9 12 3 3 M 1, x = 6 × 8 × 12 = 576 cm 3 M 2, x = 9 × 3 × 3 = 81 cm 3 M x = M 1, x − M 2, x = 495 cm 3 x CG 8 yCG = M x 576 cm 3 = = 5,69 cm A 87 cm 2 4. Determinar o centro de gravidade da figura hachurada (medidas em centímetro). y 3 4 A Figura hachurada pode ser o resultado de um retangulo (12×6) cm do qual foram retirados um triângulo e um semicírculo. 2 3 4 6 5,15 3 x Área da figura A = AR − AT − ASC A = (12 × 6 ) − [0,5 × (3 × 6 )] − (0,5 × π × r 2 ) = 56,72 cm 2 A = 53,72 cm 2 Momento Estático M R , x = 12 × 6 × 3 = 216 cm 3 M T , x = 4 × 0,5 × 3 × 6 = 36 cm 3 4×2 3 M SC , x = 0,5π × 2 2 6 − = 32,37 cm 3π M x = M R , x − M T , x − M CC , x = 147,63 cm 3 Coordenada yCG do centro de gravidade yCG = Mx A yCG = 147,63 = 2,6 cm 56,72 Mecânica dos Materiais Ricardo Gaspar 50 Analogamente, determina-se a coordenada xCG. y 3 3 4 2 8 6 1 6 x M R , y = 6 × 12 × 6 = 432 cm 3 M T ,y = 1 × = 9 cm 3 M SC , y = 50,26 cm 3 3×6 2 π × 22 = 8× 2 M y = M R , y − M T , y − M SC , y = 372,73 cm 3 Coordenada xCG do centro de gravidade xCG = 5.4 My xCG = A 372,73 = 6,57 cm 56,72 Momento de Inércia O momento de inércia de uma superfície plana em relação a um eixo de referência é definido como sendo a integral de área dos produtos dos elementos de área que compõem a superfície pelas suas respectivas distâncias ao eixo de referência, elevadas ao quadrado. y dA x I x = ∫ y 2 dA A A I y = ∫ x 2 dA y A x A unidade do momento de inércia é [L]2×[L]2=[L]4 . O momento de inércia é uma característica geométrica importantíssima no dimensionamento dos elementos estruturais, pois fornece, em valores numéricos, a resistência da peça. Quanto maior for o momento de inércia da seção transversal de uma peça, maior a sua resistência. Mecânica dos Materiais Ricardo Gaspar 51 A Propriedade: CG 1 A O momento de inércia total de uma superfície é a somatória dos momentos de inércia das figuras que a compõe. I x = I 1, x + I 2, x + I 3, x 2 CG A 2 CG 3 1 3 Exemplo Determinar o momento de inércia da superfície hachurada em relação ao eixo x que passa pelo CG. (medidas em centímetros) 8 3 b ⋅ h3 12 4 6 I xCG = I xCG = 4 x CG I xCG = 1.024 cm 4 6 5.5 1 ( 8 × 123 − 3 × 83 ) 12 Translação de eixos O momento de inércia de uma superfície em relação a um eixo qualquer é igual ao momento de inércia em relação ao eixo que passa pelo seu centro de gravidade, acrescido do produto da área (A) pelo quadrado da distância que separa os dois eixos. 2 I x = I xCG + A ⋅ yCG 2 I y = I yCG + A ⋅ xCG y y CG x CG x CG CG y CG onde: x Ix = momento de inércia da figura em relação ao eixo x. Iy= momento de inércia da figura em relação ao eixo x. I xCG = momento de inércia da figura em relação ao eixo xCG que passa pelo CG da figura. I yCG = momento de inércia da figura em relação ao eixo yCG que passa pelo CG da figura. xCG = distância do eixo y até o eixo yCG . y CG = distância do eixo x até o eixo xCG . Mecânica dos Materiais Ricardo Gaspar 52 O momento de inércia é utilizado para a determinação das tensões normais a que estão sujeitas as peças submetidas à flexão. As formulações acima podem ser expressas em função do momento estático: Mx = y⋅ A → M x2 = y 2 ⋅ A2 → y2 = M x2 A2 I x = I xCG + → 2 I x = I xCG + A ⋅ y CG I x = I xCG + M x2 ⋅A A2 M x2 A ⇒ M x2 = Ix − A I xCG Exemplo: Determinar o momento de inércia do retângulo em relação aos seguintes eixos: a) x, passando pela base inferior. b) xCG , passando pelo CG. a) dA=b.dy I x = ∫ y 2 dA A dy h h h b ⋅ y3 I x = ∫ y bdy = 3 0 0 2 x b b) h I xCG +h/2 h/2 b ⋅ h3 → Ix = 3 h b ⋅ h3 2 = ∫ y bdy = 3 −h 2 −h 2 2 2 CG x I xCG = h/2 -h/2 3 3 b h h ⋅ − − 3 2 2 b I xCG = ∫ y dA 2 A I xCG = I xCG = b h3 h3 ⋅ + 3 8 8 b 2h 3 b ⋅ h 3 ⋅ = 3 8 12 Mecânica dos Materiais Ricardo Gaspar 53 Utilizando a formulação de mudança de eixos 2 I x = I xCG + A ⋅ yCG h/2 CG h Ix = x CG h/2 x b Momento de inércia do retângulo em b ⋅ h3 relação ao seu CG → I x ,CG = 12 5.6 Ix = b ⋅ h3 h + bh ⋅ 12 2 2 b ⋅ h 3 b ⋅ h 3 bh 3 + 3 ⋅ bh 3 + = 12 4 12 4b ⋅ h 3 Ix = 12 ⇒ b ⋅ h3 Ix = 3 Módulo Resistente Define-se módulo resistente de uma superfície plana em relação aos eixos que contém o CG como sendo a razão entre o momento de inércia relativo ao eixo que passa pelo CG da figura e a distância máxima entre o eixo e a extremidade da seção estudada. y y sup Wx = I CG y max Wy = I CG x max CG x y inf x esq x dir onde: ICG = momento de inércia da peça em relação ao CG da figura x, y = distância entre o eixo do CG da figura e a extremidade da peça. A unidade do módulo resistente é [L]4 = [L]3 . [L] O módulo resistente é utilizado para o dimensionamento de peças submetidas à flexão. Para o retângulo, tem-se: h/2 CG h/2 b Ix = b ⋅ h3 12 A = b⋅h b ⋅ h3 b ⋅ h3 2 b ⋅ h2 12 Wx = = ⋅ = h 12 h 6 2 Mecânica dos Materiais 5.7 Ricardo Gaspar 54 Raio de Giração Define-se raio de giração como sendo a raiz quadrada da relação entre o momento de inércia e a área da superfície. A unidade do raio de giração é o comprimento. O raio de giração é utilizado para o estudo da flambagem. cm 4 = cm cm 2 I A i= Características Geométricas de algumas figuras conhecidas Momento de Inércia Figura Momento Resistente Raio de Giração Quadrado Ix = CG h h4 12 Wx = h3 6 ix = ix = h 12 h Retângulo CG h x CG I xCG = bh 3 12 Wx = b ⋅ h2 6 I xCG = bh 3 36 Wx = b ⋅ h2 12 πd 4 Wx = h 12 b Triângulo h x CG CG ix = h⋅ 2 6 b Círculo CG x CG I xCG = 64 π ⋅ D3 ix = 32 D 4 D Círculo vazado D d I x CG = CG x CG π (D 4 − d 4 ) 64 Wx = π (D 3 − d 3 ) 32 ix = 1 D2 + d 2 4 Mecânica dos Materiais Ricardo Gaspar Exemplo A figura representa a seção transversal de uma viga “T”. Para a figura, determinar: a) o centro de gravidade; b) o momento de inércia em relação ao eixo x; c) os módulos Resistentes superior e inferior; d) o raio de giração. (medidas em centímetros) 2 55 3 2 1 2 3 3 y sup x CG CG 5 y inf x Para facilitar a determinação das propriedades geométricas de figuras compostas, convém montar a seguinte tabela: Figura 1 2 3 b (cm) 3 2 3 h (cm) 2 7 2 Σ yCG (cm) 6 3,5 6 A (cm2) 6 4 6 26 Mx (cm3) 36 49 36 121 ICGi (cm4) 2 57,17 2 Ixi (cm4) 218 228,67 218 664,67 Centro de gravidade (CG) y CG = ∑M ∑A x = 121 = 4,65 cm 26 Como o eixo de referência passa pela base da figura, então yinf=4,65cm e ysup=2,35cm. Na coluna ICGi (cm4) foi determinado o momento de inércia de cada figura, passando pelo respectivo centro de gravidade. Por se tratar de retângulos, utilizou-se a expressão I x = b ⋅ h 3 / 12 . Em seguida, deve-se proceder à translação destes momentos de inércia para eixo x de referência para determinar a sua somatória. A translação de eixos é feita por meio da expressão: I x = I CG + y 2 ⋅ A Obtido o momento de inércia total em relação ao eixo x, deve-se agora proceder à translação para o eixo x que passa pelo centro de gravidade da figura, por meio da seguinte expressão: I CG M x2 = Ix − A I CG 1212 = 664,67 − 26 O momento de inércia da figura em relação ao seu centro de gravidade é I CG = 101,55 cm 4 Em seguida, calculam-se os momentos resistentes: Wx ,sup = I CG 101,55 = = 43,21 cm 3 ysup 2,35 Finalmente, determina-se o raio de giração. ix = I CG A ix = 101,55 = 1,98 cm 26 Wx ,inf = I CG 101,55 = = 21,84 cm 3 4,65 y inf
Baixar