Passeio Digital: Um sistema de multiprojeção de baixo custo voltado às
aplicações educacionais
Fernando Teubl, Olavo Belloc, Mario Nagamura, Marcia Kondo
Marcio Cabral, Fabio Doreto, Rodrigo Ferraz, Marcelo Zuffo, Roseli Lopes
Laboratório de Sistemas Integráveis (LSI)
Escola Politécnica da Universidade de São Paulo
{ftf, belloc, nagamura, mkondo, mcabral, fabioldr, rferraz, mkzuffo, roseli}@lsi.usp.br
Resumo
Este artigo apresenta um sistema imersivo 3D que foi implantado em um Museu na Capital do Estado de São Paulo.
Neste artigo serão apresentados os métodos e tecnologias
empregados neste projeto, assim como algumas soluções e
desafios para construção de sistemas de realidade virtual
de alta definição. Este artigo tem como principal objetivo
viabilizar a implantação de sistemas imersivos sofisticados
em locais com orçamento reduzido.
1. Introdução
Sistemas de processamento gráfico e projeção de imagens têm sido muito utilizados em aplicações como jogos,
vı́deo conferências, visualizações de imagens médicas, entre muitos outros. Nos últimos anos, os custos de unidades
de processamento gráfico e projetores vêm diminuindo, permitindo o seu uso em diversos outros ambientes.
Porém, o valor de computadores gráficos e projetores
de alto desempenho para aplicações avançadas — onde são
exigidos cálculos geométricos complexos e visualização de
alta definição, brilho e contraste — continuam muito caros,
dificultando a sua implantação fora do ambiente de pesquisa
tecnológica.
O uso de realidade virtual na área da educação é uma alternativa para o ensino tradicional[27], e permite extrapolar
os limites dos materiais didático tradicionais possibilitando,
por exemplo, a exploração de lugares virtuais, melhor compreensão da fı́sica e biologia, entre outras[8].
Este artigo apresenta a implantação de um sistema imersivo estereoscópico de alta definição utilizando
técnicas de multiprojeção no Museu Catavento Cultural e
Educacional[1] — localizado na Capital do Estado de São
Paulo — com objetivos educacionais para o público infan-
til e juvenil. Uma das metas deste trabalho é estimular a
disseminação de sistemas de realidade virtual em museus,
escolas, bibliotecas, entre outros, promovendo uma melhor
qualidade na educação e aprendizagem.
Para reduzir os custos dos sistemas de Realidade Virtual, o artigo propõe a substituição de máquinas monolı́ticas
avançadas e projetores complexos por aglomerados de
máquinas e projetores convencionais, reduzindo drasticamente o custo dos equipamentos sem comprometer a qualidade final.
De acordo com a Lei de Grosch[9], o poder computacional aumenta proporcionalmente ao quadrado do custo.
Assim, a tı́tulo exemplificativo, um projetor A com o dobro
de linhas e colunas do que outro projetor B, ou seja, com
uma resolução quatro vezes maior, deverá apresentar custo
muito superior a 4 projetores do tipo B.
Considerando que cada projetor B custe N , o projetor A
deverá custar (4)2 N = 16N . Desta forma, o custo de um
projetor A é 16N
4N = 4 vezes maior do que se fossem usados
quatro projetores B. Esta definição também pode ser aplicada para o processamento gráfico, onde um supercomputador monolı́tico pode ser substituı́do por um aglomerado de
computadores mais simples, reduzindo o custo do sistema.
2. Trabalhos Correlatos
Diversos sistemas de visualização baseados em
multiprojeção são estudados e propostos desde a década de
70. Na época, um sistema de simulação de voo utilizando
três projetores foi comercializado pela Evans&Sutherland.
O sistema era difı́cil de calibrar e tinha o custo elevado.
Além do custo elevado dos projetores, o processamento gráfico era gerado por computadores monolı́ticos
(e.g. SGI InfiniteReality), com o custo extremamente
elevado.
Para alinhar os projetores e apresentar uniformidade
aparente nas imagens, diversos estudos foram realizados sobre alinhamento de projeção, correção de distorção
geométrica e variações fotométricas. Inicialmente, todos
os ajustes dos projetores eram mecânicos, e as estruturas
eram complexas e difı́ceis de operar, exigindo muito tempo
de pessoas especializadas para realizar todos os ajustes de
calibração.
Perto da virada do século, os custos das placas gráficas
começaram a diminuir, e começaram então a surgir
os primeiros aglomerados de computadores gráficos, reduzindo o custo por substituir as máquinas monolı́ticas de
processamento gráfico de elevado custo por um grupo de
máquinas convencionais [32, 23, 18, 25, 24, 26].
Com o uso de aglomerados gráficos, as aplicações se
tornaram escaláveis e com uma grande capacidade de
processamento gráfico. O uso de multiprojeção ganhou
destaque devido a popularização de aglomerados gráficos,
mas o seu uso ainda era complexo e caro devido ao valor
dos projetores, telas e estruturas.
No inı́cio deste século, o custo dos projetores começaram
a diminuir de forma significativa, e diversas pesquisas sobre
o uso de multiprojeção surgiram em diferentes grupos, todos buscando flexibilidade e alta qualidade visual[6, 19, 4,
3, 31, 30, 11, 5, 28, 29].
A maioria dos sistemas de multiprojeção encontrados na
literatura propõe configurações como: uma única tela plana
frontal de alta definição[13, 21], duas telas perpendiculares
(quinas)[2], telas panorâmicas curvadas[10] e telas com superfı́cies arbitrárias[20].
Trabalhos mais recentes publicados na área de
multiprojeção propõem formas de correção de brilho
e cor interprojetores e intraprojetores[16, 10]. Estes trabalhos buscam homogeneizar os tons na imagem composta
pelos projetores.
A maior parte dos trabalhos sobre multiprojeção e realidade virtual é voltada para fins de pesquisas tecnológicas, e
não sociais e educacionais.
Este artigo apresenta um sistema de realidade virtual
baseado em multiprojeção formado por três telas planas.
Embora o uso de estereoscopia em multiprojeção já tenha
sido proposto por alguns autores[14], este trabalho foca na
implantação de um sistema de realidade virtual multiprojetor estereoscópico de baixo custo.
2.1. Calibração de Projetores
O Sistema de Multiprojeção — em sua construção mais
simples — é composto por um grupo de projetores organizados em forma de grade fixados em prateleiras ou outras
estruturas. Geralmente, cada computador gráfico alimenta
um ou dois projetores, e é coordenado por um gerenciador
centralizado. Cada computador gráfico é conectado a um ou
mais projetores, e cada projetor contribui com uma porção
da imagem de forma sincronizada, onde todas as máquinas
encontram-se interconectadas por uma rede dedicada.
Em um sistema de Multiprojeção, cada projetor é disposto para colaborar com apenas uma porção da imagem
final. Para proporcionar qualidade visual, é fundamental
que a imagem projetada por cada projetor esteja alinhada
com os seus vizinhos, ou seja, a área de transição entre um
projetor e outro adjacente seja contı́nua.
Na literatura, há basicamente dois métodos para atingir
o alinhamento dos projetores: o método mecânico e o automático.
2.1.1. Alinhamento Mecânico
O alinhamento mecânico consiste em alinhar os projetores fisicamente para prover uma imagem contı́nua e uniforme. Comumente, os projetores são fixados em suportes
reguláveis de alta precisão, permitindo o ajuste fino individual de cada projetor. Geralmente, o uso de prateleiras com
suportes para cada projetor com três graus de liberdade são
utilizados[11].
A vantagem do alinhamento mecânico é que não há necessidade de nenhum software para o seu uso. Porém, o
processo de alinhamento é demorado e complexo. Além
disso, não é possı́vel aplicar nenhum tipo de correção para
telas irregulares ou correção para projetores cuja lente distorce as imagens projetadas, e as estruturas geralmente são
grandes e pesadas, dificultando o seu transporte.
2.1.2. Alinhamento Automático
O alinhamento automático permite realizar os ajustes dos
projetores sem utilizar recursos sofisticados ou estruturas
complexas. O sistema consiste em corrigir as imagens de
cada projetor em tempo real, ou seja, cada imagem gerada
por cada projetor sofre alterações de forma que a projeção
final pareça contı́nua e única.
Este ajuste da imagem é conhecido como correção
geométrica (Geometric Correction), e é calculada por um
software especial de calibração que utiliza uma ou mais
câmeras para obter padrões de imagens dos projetores, e assim, identificar a posição precisa de cada um em relação
à tela. Após a captura das posições de cada projetor, o
sistema armazena as informações geométricas. Isto é conhecido como registro geométrico (Geometric Registration).
Após o registro geométrico dos projetores, a correção
geométrica pode ser aplicada de duas formas: por software
ou por um hardware dedicado.
Por software, a imagem deve ser ajustada após cada
quadro pelo próprio computador que gerou a imagem.
Muitas vezes, a aplicação é modificada para chamar a
função de correção após a geração de cada quadro. Para
evitar modificações na aplicação, o uso de bibliotecas como
o Chromium[12] pode interceptar e modificar as chamadas
OpenGL para executar os ajustes necessários, sem a necessidade de alterar o código original da aplicação.
Alternativamente, um hardware dedicado — conectado
na saı́da de vı́deo do computador — aplica as alterações
necessárias de acordo com o registro geométrico para o projetor correspondente, e então envia o sinal modificado para
o projetor. A maior vantagem do uso de um hardware dedicado é que não é necessário nenhum software especial nos
computadores gráficos, reduzindo o uso de processamento,
além de permitir que qualquer dispositivo utilize o sistema
de multiprojeção, como, por exemplo, vı́deo games.
Em uma calibração automática de multiprojeção, duas
categorias de registro geométrico podem ser adotadas:
modelos paramétricos e não-paramétricos[15].
Não-Paramétricos:
A técnica de registro nãoparamétrico não considera a geometria da tela. Todos os
projetores são alinhados unicamente do ponto de vista da
câmera, ou seja, existe uma relação Pn (xn , yn ) → C(u, v),
onde Pn é um Projetor n e C é a câmera.
Paramétricos: A técnica de registro paramétrico é utilizada quando a tela é parametrizada através de uma determinada função. Todos os projetores são mapeados para
a coordenada de tela, ou seja, existe uma função tal que
Pn (xn , yn ) → C(u, v) → D(s, t), onde D é a coordenada
da tela parametrizada.
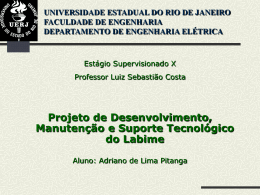
A figura 1 sumariza os sistemas de calibração
paramétricos e não paramétricos.
Figura 1. Calibração Paramétrica e Não
Paramétrica
O grande benefı́cio de parametrizar a tela é que a imagem
fica uniforme, enquanto na abordagem não paramétrica, a
imagem só é uniforme para o ponto de vista da câmera.
Desta forma, se existirem diversos observadores ao redor da
tela, os observadores mais afastados da linha da câmera em
relação à tela poderão observar uma distorção na imagem,
conforme apresentado na figura 1[15].
O sistema apresentado neste artigo implementa a
calibração paramétrica, porém não utiliza câmeras. Ao
invés disso, o usuário seleciona manualmente todos os limites da tela através de um cursor, e então marca as áreas
de intersecção entre os projetores. Isto é necessário para alinhar os projetores laterais com os projetores frontais nas
três telas, utilizando exatamente todo o espaço de projeção.
Caso fosse utilizado câmera, seria necessário incluir marcadores em todas as bordas da tela, e utilizar uma câmera de
alta definição para detectar estes marcadores precisamente,
encarecendo o sistema.
3. Sistema de Projeção
3.1. Infraestrutura
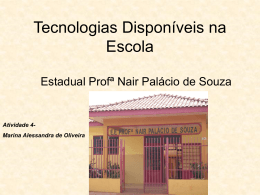
O Sistema de Projeção Imersivo 3D do Catavento é composto por três telas com dimensões: 3,5m × 2,4m (tela lateral esquerda), 6m × 2,4m (tela frontal) e 3,5m × 2,4m
(tela lateral direita), totalizando 31,2m2 de projeção. Foram
utilizados dois projetores para cada tela lateral, e quatro projetores para a tela frontal, totalizando oito projetores. Para
diminuir a distância de tiro dos projetores, cada aparelho foi
equipado com lentes 0.8:1 (Short Throw).
A figura 2 esquematiza a sala com as suas dimensões.
Figura 2. Sala de Projeção
Para prover a sensação de estereoscopia, foi adotada a
tecnologia de estereoscopia passiva com lentes polarizadas.
Assim, metade dos projetores são responsáveis por projetar imagens para o olho esquerdo, enquanto a outra metade
dos projetores são responsáveis por projetar imagens para o
olho direito. A estereoscopia passiva foi adotada por dois
motivos:
1. Possibilitar o uso de projetores convencionais em vez
de projetores com alta taxa de atualização, diminuindo
assim o custo dos equipamentos;
2. Por tratar-se de um museu com expectativa de alta
frequência de visitação, os óculos de estereoscopia
ativa demandariam um investimento e manutenção
muito superior aos óculos polarizantes, implementados na estereoscopia passiva.
Cada par de projetores contém dois filtros polarizantes
para separar a projeção de cada olho, e cada dupla de projetores é fixada em um suporte denominado “Totem de
Projeção”. Cada Totem de Projeção é equipado com um
computador gráfico. No sistema, existem quatro Totens de
Projeção, conforme apresentado na figura 2.
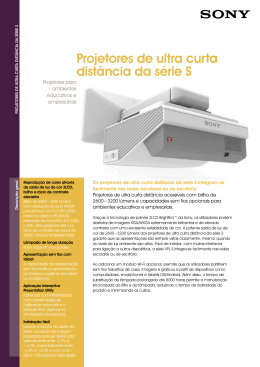
A figura 3 apresenta o Totem de Projeção com um par de
projetores e seus respectivos filtros polarizantes.
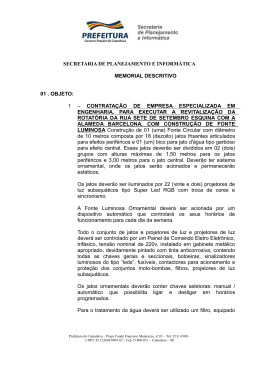
Figura 4. Tela e Projetores
maior custo na construção de sistemas de realidade virtual
com estereoscopia passiva baseado em polarização. Apesar
disso, mesmo usando telas com custo elevado, o uso de estereoscopia passiva apresenta um custo inferior à estereoscopia ativa, devido aos valores dos projetores.
O Totem de Interação controla o conteúdo da aplicação.
Localizado dentro da área de projeção (área do público, ver
figura 2), o Totem de Interação é conectado ao gerenciador
por uma rede sem fio, e disponibiliza para os usuários uma
interface simples com tela sensı́vel ao toque (touch screen).
A figura 5 apresenta o Totem de Interação.
Figura 3. Totem de Projeção
Para coordenar todos os Totens de Projeção, um quinto
computador gerencia e sincroniza todos os demais. Esta
máquina também é responsável por reproduzir o som,
conectado a um amplificador de áudio 5.1.
As telas são rı́gidas, formada por placas de acrı́licos e
uma pelı́cula especial de projeção. A pelı́cula tem um ganho
próximo de 1.0, ou seja, adequado para ambientes com
múltiplos pontos de vista: em telas com ganho superior a
1.0, existe um ganho de brilho em regiões diretamente a
frente e perpendicular à tela, porém perde muito brilho em
pontos mais afastados desta área, proporcionando uma imagem com brilhos diferentes de acordo com a região da tela
e posição dos observadores.
Além disso, a pelı́cula não modifica ou perde a
polarização da projeção, proporcionando qualidade na
sensação de estereoscopia. A figura 4 apresenta a tela e os
filtros dos projetores.
As telas de retro-projeção (back projection) que não prejudicam a polarização são muito caras, e poucos estudos
abordam este tipo de tela visando o baixo custo. Proporcionalmente, a tela de projeção é um dos componentes de
Figura 5. Totem de Interação
3.2. Software
O software de visualização desenvolvido para o projeto foi planejado para reproduzir vı́deos estereoscópicos
de forma distribuı́da, mantendo o conteúdo apresentado em
cada projetor coerente e sincronizado, além de ser o responsável por ajustar as imagens do vı́deo, com o objetivo de
corrigir eventuais erros provenientes do mau alinhamento
dos projetores e diferenças intrı́nsecas de brilho e cor existentes entre os diversos aparelhos de projeção que compõem
o sistema.
O software de visualização pode operar em dois modos:
calibração e reprodução de vı́deo. No modo calibração,
o software detecta imperfeições nas regiões da tela onde
existem intersecções de projetores. Atualmente, este procedimento de calibração é realizado com o auxı́lio do
usuário, que através de um joystick, indica para o software
de calibração as regiões iluminadas por cada aparelho de
projeção.
Através dos parâmetros de calibração, o software de
visualização consegue distorcer as imagens originais do
vı́deo, para que quando as mesmas sejam projetadas na
superfı́cie da tela, o observador não seja capaz de perceber os erros de alinhamento dos projetores e eventuais discrepâncias na tonalidade das cores e na intensidade do
brilho.
No modo reprodução de vı́deo, o software utiliza os
parâmetros obtidos no processo de calibração (Registro
Geométrico) para corrigir as imagens que serão projetadas
na tela. Embora cada projetor tenha o seu próprio arquivo de
vı́deo, o software de visualização precisa garantir o sincronismo para evitar descontinuidades temporais nas regiões
adjacentes, onde as imagens de um determinado aparelho
de projeção encontram com as imagens de outro projetor.
O sincronismo da apresentação foi realizado através
de um relógio de precisão compartilhado entre todas as
máquinas participantes do sistema. Este relógio de precisão
é usado pelo software na decodificação do vı́deo. Caso exista uma determinada instância do software cujo relógio
esteja com erro acima da margem permitida, o relógio é
corrigido, mantendo o sincronismo com os outros computadores do sistema.
Para facilitar o gerenciamento do sistema, o software foi
elaborado com uma arquitetura tipo mestre-escravo. Esta
arquitetura permite com que diversas instâncias do visualizador sejam criadas. No entanto, todas estas instâncias
precisam estar conectadas ao mestre, que é responsável por
gerenciar a apresentação do conteúdo e manter o relógio
de precisão atualizado. Desta forma, o mestre deve possuir
toda a configuração do roteiro e deve ser único para todo o
sistema.
O processo de calibração deve ser realizado antes da
apresentação do Passeio Virtual, e os resultados obtidos ao
final do procedimento podem ser reutilizados, desde que as
posições e os parâmetros dos projetores não sejam alterados. Este mecanismo de calibração semi-automática facilita
a manutenção do sistema de projeção, evita a compra de
equipamentos sofisticados e a prática de longos cursos de
capacitação.
As principais informações que são enviadas do mestre
para o escravo são: o roteiro e o relógio de alta precisão. O
roteiro consiste em uma lista de vı́deos que devem ser apresentados no sistema de projeção. A informação de roteiro
é enviada ao escravo em tempo de execução para permitir
um roteiro dinâmico, caso seja interessante para a aplicação
final.
Na instalação implantada no Catavento, o roteiro é determinado pelo visitante, que escolhe a sequência de vı́deos
baseado em um mecanismo de votação. Os usuários que observam a trajetória votam no próximo destino que desejam
visitar. Após a apuração dos votos, o mestre envia o novo
roteiro para os escravos. Desta forma, enquanto o roteiro
escolhido é executado, os usuários podem determinar qual
o próximo ponto turı́stico a ser visitado.
3.3. Conteúdo
O conteúdo apresentado ao visitante consiste em um passeio virtual interativo aos principais pontos turı́sticos da
cidade do Rio de Janeiro virtual. O Rio de Janeiro virtual
é um modelo 3D contendo as principais atrações turı́sticas
da cidade. Esta modelagem procurou valorizar as caracterı́sticas naturais do ambiente. Os pontos turı́sticos presentes no roteiro são: Praia de Copacabana, Maracanã, Pão
de Açúcar e Cristo Redentor.
O sistema de projeção utilizado para apresentar o Rio de
Janeiro virtual possui caracterı́sticas pouco convencionais
quando comparado com sistemas simples com uma única
tela plana, como um monitor ou projetor LCD. Caracterı́sticas como resolução, brilho, sobreposição de imagens
e um conjunto de telas ortogonais, tornam o sistema complexo, dificultando a criação de vı́deos para o mesmo.
Os desafios encontrados durante o processo de criação
de conteúdo envolveram diversos aspectos: modelagem,
configuração e manipulação de câmera, renderização de
vı́deo estereoscópico e renderização de vı́deo panorâmico.
Estas tarefas, que são consideradas simples com conteúdos
convencionais, demonstraram ser consideravelmente complexas ao manipular vı́deos com caracterı́sticas especı́ficas
para este sistema.
3.3.1. Vı́deo Estereoscópico Panorâmico
A geração de conteúdo estereoscópico consiste na
renderização de duas imagens para cada quadro do vı́deo,
uma imagem para o olho esquerdo e outra para o olho direito. Cada uma destas imagens deve considerar o ponto
de vista do seu respectivo olho. Assim, as câmeras virtuais
precisam ter separação e perspectiva semelhante ao do olho
humano.
Já a geração de vı́deo panorâmico consiste na
renderização de diversas imagens para cada quadro do
vı́deo, uma imagem para cada tela do sistema de projeção.
Nesta configuração, a câmera deve ser posicionada em um
determinado ponto do espaço e utilizar o mesmo eixo de
rotação para todas as telas do sistema.
A figura 6 ilustra as duas técnicas necessárias na
criação do conteúdo: imagem estereoscópica e imagem
Figura 6. Câmeras em estéreo e panorâmicas
da mudança de perspectiva na qualidade do vı́deo[22, 17].
Esta técnica visa segmentar o ângulo de rotação em diversos ângulos menores. Desta forma, ao invés do vı́deo final
ser composto pelas imagens das câmeras nas posições D1 e
D2 apenas, ele será composto por diversas imagens geradas
por câmeras rotacionadas de ângulos pequenos. Assim, a
diferença de perspectiva nas imagens é suavizada por pequenas alterações nas posições das câmeras.
O resultado obtido pode ser observado na simulação
demonstrada pela figura 9. Nesta simulação, o sistema de
projeção utilizado é composto por apenas duas telas ortogonais, onde a união das telas é representada pela linha verde
da figura.
panorâmica. No entanto, observe que ao utilizar as duas
técnicas simultaneamente, não é possı́vel respeitar uma regra simples: ao rotacionar o par de câmeras estéreo, não é
possı́vel manter cada câmera no seu eixo de rotação. Isto
porque o eixo de rotação do par de câmeras estéreo fica no
meio das duas câmeras, ou seja, no centro da cabeça do observador virtual.
Figura 9. Resultado da projeção com ângulos
intermediários
Figura 7. Rotação de câmeras em estéreo
A figura 7 demonstra que ao realizar a rotação no eixo
das câmeras, a perspectiva da câmera D1 foi drasticamente modificada ao rotacioná-la para a posição D2. Esta
alteração brusca de perspectiva causa desconforto visual
para o observador na imagem resultante.
Figura 8. Segmentação do ângulo de rotação
A figura 8 mostra uma técnica para minimizar o impacto
A figura 9 ilustra o mesmo sistema de projeção sendo
iluminado pelas imagens geradas através das duas técnicas:
com e sem ângulos intermediários. Na esquerda, foram
consideradas apenas duas posições de câmera, uma posição
para cada tela. Já na direita, foram consideras oito posições
intermediárias, quatro posições para cada tela. Observe que
esta segmentação suaviza as transições de perspectiva da
câmera.
No projeto, foram utilizadas 16 câmeras para cada olho
humano, sendo aproximadamente 4 câmeras para cada 3
metros de tela. Como o vı́deo é estereoscópico, foram
necessárias 32 câmeras no total, onde cada uma das câmeras
contribui com uma pequena fatia da imagem final do vı́deo.
3.3.2. Renderização paralela
O sistema de projeção montado possui três telas: uma
frontal e duas laterais, contendo uma superfı́cie de projeção
com área igual a 13m × 2,4m. Cada projetor utilizado possui resolução de 1400 × 1050 pontos. Para projetar em toda
a superfı́cie de projeção mantendo a qualidade do vı́deo,
foram usados 8 projetores em estéreo, 4 projetores para cada
olho. Desta forma, a resolução final do vı́deo a ser apresentado no sistema é de 5600 × 1050 pontos.
Em um vı́deo com resolução de 5600 × 1050, cada
quadro deste vı́deo possui 5.880.000 pontos. Por se tratar
de uma sistema com estereoscopia, cada quadro do vı́deo
deve apresentar duas imagens, uma para o olho esquerdo e
pontos
outra para o direito, totalizando 11.760.000 quadro
. Caso
quadros
o vı́deo seja elaborado com 30 segundo
, cada segundo de
vı́deo deve apresentar 352.800.000 pontos.
Considerando que um longa metragem realizado por
grandes produtoras é geralmente produzido na resolução de
quadros
, cada segundo de vı́deo
1280 × 720 pontos, com 24 segundo
apresenta 22.118.400 pontos, aproximadamente 16 vezes
menor que a quantidade produzida neste projeto.
A animação final, que inclui todos os trajetos realizados pelo Rio de Janeiro, possui aproximadamente
9.000 quadros, cerca de 5 minutos de vı́deo. Cada
quadro do vı́deo foi dividido em 32 fatias. O tempo de
renderização de cada fatia é de aproximadamente 8 minutos
em um computador com dois processadores AMD Opteron
2.2Ghz (Dual-core), com 8 GB de memória RAM. Assim, uma única máquina demoraria 4,5 anos para concluir a
renderização de todo o vı́deo.
Para viabilizar a renderização do vı́deo em um tempo
razoável foi necessário utilizar um aglomerado de computadores. A solução adotada para gerenciar e distribuir as tarefas de renderização no aglomerado de computadores foi
o Dr. Queue[7]. Este gerenciador de tarefas foi instalado
em um computador com sistema operacional Linux para
controlar um aglomerado de computadores com 64 processadores ao todo.
Após a paralelização do processo de renderização, o
tempo total foi reduzido para 90 dias. Neste perı́odo, todas as máquinas pertencentes ao aglomerado permaneceram
ligadas 24h por dia, sete dias por semana.
Para facilitar a manipulação do conteúdo renderizado,
foi criado um vı́deo para cada projetor utilizado no sistema.
Desta forma, cada vı́deo contém apenas as imagens correspondentes a porção de sua respectiva tela, e, portanto, com
uma resolução e tamanho inferior, respeitando as limitações
existentes nos softwares convencionais de edição de vı́deo.
4. Conclusão e Trabalhos Futuros
O sistema de projeção imersivo do Catavento foi elaborado com o objetivo de reduzir o seu custo de implantação
e manutenção, sem comprometer a qualidade final das imagens apresentadas. Estes objetivos foram alcançados com
a utilização de duas técnicas: construção do próprio sistema de projeção imersivo, utilizando uma arquitetura de
multiprojeção, e segmentação de vı́deo em fatias, utilizando
renderização paralela e distribuı́da.
As técnicas de multiprojeção permitiram que o trajeto pelo Rio de Janeiro virtual fosse apresentado em alta
resolução, mesmo utilizando projetores convencionais. O
software de calibração foi desenvolvido para corrigir eventuais erros de alinhamento, cor e brilho. O resultados obtidos através da calibração do software foram satisfatórios,
minimizando as falhas presentes na intersecção dos proje-
tores e impedindo o observador de perceber a união das imagens geradas por dois aparelhos de projeção adjacentes.
A renderização paralela e distribuı́da viabilizou a
geração de conteúdo de alta resolução em um tempo
razoável. Este conteúdo, apesar de apresentar somente
5 minutos de vı́deo contı́nuo, foi o suficiente para criar
uma programação curta. Esta programação se mostrou ter
tamanho ideal para o local onde o sistema foi instalado, uma
vez que o Museu apresenta um número considerável de visitantes diários, fazendo com que a permanência controlada
dos observadores em determinados locais seja de extrema
importância para manter constante o fluxo de pessoas.
Apesar do Sistema de Projeção Imersivo 3D do
Catavento ter sido elaborado com telas rı́gidas, não foi
possı́vel obter um material de baixo custo que mantivesse
a polarização da luz, e portanto, viabilizasse a projeção de
imagens em estereoscopia passiva baseada em polarização.
Uma parte do material para produzir as telas de projeção do
sistema é proprietário, e seu custo foi incompatı́vel com o
resto dos materiais adquiridos para o projeto.
Desta forma, os trabalhos futuros do grupo envolverão
a pesquisa por materiais rı́gidos ou flexı́veis que permitam
a construção de telas para estereoscopia passiva em retroprojeção. Os resultados desta pesquisa irão reduzir ainda
mais o custo dos sistemas de projeção imersivos.
5. Agradecimentos
Agradecemos toda a equipe do Museu Catavento Cultural e Educacional, em especial, o Dr. Sergio Silva de Freitas, por toda dedicação e ajuda durante todo o desenvolvimento do projeto. Agradecemos também toda a equipe do
Laboratório de Sistemas Integráveis da Escola Politécnica
da Universidade de São Paulo, que de forma direta ou indireta, ajudaram a viabilizar e implantar este projeto.
Referências
[1] Catavento
cultural
e
educacional.
http://www.cataventocultural.org.br, Fevereiro 2009.
[2] M. Ashdown, M. Flagg, R. Sukthankar, and J. M. Rehg. A
flexible projector-camera system for multi-planar displays.
IEEE Computer Society Conference on Computer Vision and
Pattern Recognition (CVPR’04), 2:165–172, 2004.
[3] M. S. Brown and W. B. Seales. A practical and flexible tiled
display system. IEEE Pacific Graphics, page 194, 2002.
[4] H. Chen, R. Sukthankar, G. Wallace, and K. Li. Scalable alignment of large-format multi-projector displays using camera homography trees. In Proceedings of Visualization, pages 339–346, 2002.
[5] Y. Chen, D. W. Clark, A. Finkelstein, T. C. Housel, and
K. Li. Automatic alignment of high-resolution multiprojector display using an un-calibrated camera. In IEEE
Visualization, 2000.
[6] D. Cotting, R. Ziegler, M. Gross, and H. Fuchs. Adaptive
instant displays: Continuously calibrated projections using
per-pixel light control. Proceedings of Eurographics 2005,
24:705–714, 2005.
[7] DrQueue.
http://www.drqueue.org/cwebsite/, Fevereiro
2009.
[8] I. K. Ficheman, A. A. M. Nogueira, M. C. Cabral, B. T. santos, A. G. D. Corrêa, M. K. Zuffo, and R. de Deus Lopes.
Gruta digital: um ambiente de realidade virtual imersivo
itinerante para aplicacoes educacionais. Proceedings of
the XVII Simposio Brasileiro de Informatica na Educacao,
2006.
[9] H. R. J. Grosh. Grosch’s law revisited. In Computerwold,
1975.
[10] M. Harville, B. Culbertson, I. Sobel, D. Gelb, A. Fitzhugh,
and D. Tanguay. Practical methods for geometric and photometric correction of tiled projector. In IEEE International
Workshop on Projector-Camera System, 2006.
[11] M. Hereld, I. R. Judson, and R. L. Stevens. Introduction
to building projection-based tiled display systems. In IEEE
Computer Graphics and Applications, 2000.
[12] G. Humphreys, M. Houston, R. Ng, R. Frank, S. Ahern,
P. Kirchner, and J. T. Klosowski. Chromium: A stream processing framework for interactive rendering on clusters. In
SIGGRAPH, 2002.
[13] K. Li, H. Chen, Y. Chen, D. W. Clark, P. Cook, S. Damianakis, G. Essl, A. Finkelstein, T. Funkhouser, A. Klein,
Z. Liu, E. Praun, R. Samanta, B. Shedd, J. P. Singh, G. T.
Zheng, and Jiannan. Early experiences and challenges in
building and using a scalable display wall system. In IEEE
Computer Graphics and Applications, 2000.
[14] H. Liao, N. Hata, M. Iwahara, S. Nakajima, I. Sakuma, and
T. Dohi. High-resolution stereoscopic surgical display using parallel integral videography and multi-projector. Medical Image Computing and Computer-Assisted Intervention,
2489:85–92, 2002.
[15] A. Majumder and M. S. Brown. Practical Multi-Projector
Display Design. A K Peters, 2007.
[16] A. Majumder and S. Irani. Perception based contrast enhancement of images. In ACM Transactions on Applied Perception, 2007.
[17] S. Peleg, M. Ben-Ezra, and Y. Pritch.
Omnistereo:
Panoramic stereo imaging. IEEE Trans. Pattern Anal. Mach.
Intell., 23(3):279–290, 2001.
[18] B. Raffin, M. K. Zuffo, H. Kaczmarski, P. Zhigeng, B. Schaeffer, C. Goudeseune, and L. P. Soares. Introducion to commodity clusters for multiprojector displays. In IEEE VR
Workshop Commodity Cluster for Virtual Reality, 2003.
[19] A. Raij, G. Gill, A. Majumder, H. Towles, and H. Fuchs.
Pixelflex2: A comprehensive, automatic, casually-aligned
multi-projector display. IEEE International Workshop on
Projector-Camera Systems, 2003.
[20] R. Raskar, M. S. Brown, R. Yang, W.-C. Chen, G. Welch,
H. Towles, B. Seales, and H. Fuchs. Multi-projector displays using camera-based registration. In IEEE Visualization, 1999.
[21] D. R. Schikore, R. A. Fischer, R. Frank, R. Gaunt, J. Hobson, and B. Whitlock. High-resolution multiprojector display walls. In IEEE Computer Graphics and Applications,
2000.
[22] A. Simon, R. C. Smith, and R. R. Pawlicki. Omnistereo
for panoramic virtual environment display systems. In VR
’04: Proceedings of the IEEE Virtual Reality 2004, page 67,
Washington, DC, USA, 2004. IEEE Computer Society.
[23] L. P. Soares. Um Ambiente de Multiprojeção Totalmente
Imersivo Baseado em Aglomerados de Computadores. PhD
thesis, Escola Politécnica, Universidade de São Paulo, 2005.
[24] L. P. Soares, M. C. Cabral, P. A. Bressan, H. Fernandes,
R. D. Lopes, and M. K. Zuffo. Management of commodity
computer cluster oriented to virtual reality applications. In
Proceedings of V Symposium on Virtual Reality, 2002.
[25] L. P. Soares, M. C. Cabral, P. A. Bressan, R. D. Lopes,
and M. K. Zuffo. Powering multiprojection immersive environments with cluster of commodity. In Proceedings of 1o
SIACG, 2002.
[26] G. Stoll, M. Eldridge, D. Patterson, A. Webb, S. Berman,
R. Levy, C. Caywood, M. Taveira, S. Hunt, and P. Hanrahan.
Lightning-2: A high-performance display subsystem for pc
clusters. In SIGGRAPH, 2001.
[27] F. Vendruscolo, J. A. Dias, G. Bernardi, and M. L. Cassal.
Escola tri-legal – um ambiente virtual como ferramenta de
apoio ao ensino fundamental através de jogos educacionais.
Revista digital da CVA-RICESU, 3, 2005.
[28] R. Yang, M. S. Brown, W. B. Seales, and H. Fuchs. Geometrically correct imagery for teleconferencing. In ACM
International Conference on Multimedia, 1999.
[29] R. Yang, M. S. Brown, W. B. Seales, and H. Fuchs. Geometrically correct imagery for teleconferencing. In ACM
International Conference on Multimedia, 1999.
[30] R. Yang, D. Gotz, J. Hensley, H. Towles, and M. Brown.
Pixelflex: A reconfigurable multi-projector display system.
IEEE Visualization 2001, pages 167–174, 2001.
[31] R. Yang and G. Welch. Automatic projector display surface
estimation using every-day imagery. In 9th International
Conference in Central Europe on Computer Graphics, Visualization and Computer Vision, 2001.
[32] J. A. Zuffo, L. P. Soares, M. K. Zuffo, and R. D. Lopes.
Caverna digital - sistema de multiprojeção esteroscópico
baseado em aglomerados de pcs para aplicações imersivas
em realidade virtual. In Proceedings of IV Symposium on
Virtual Reality, 2001.
Baixar