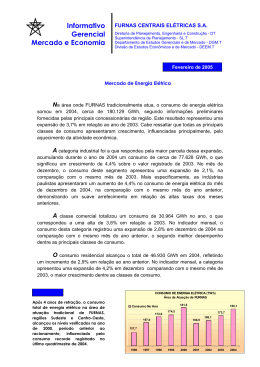
Motors & Digital Drives Servoreguladores brushless digital Servoacionamento brushless digital DGM 460 - DGM 240 Características principales / Principais Características STANDALONE • Tensión eléctrica de red desde 230V a 460Vca máximo • Gama de potencia desde 0,15 a 130 kW • Par máximo 200% del par nominal • Referencia de velocidad a 16 bit • Filtro EMC interno* • Circuito de precarga • Resistencia de frenado interno* STANDALONE • Tensão de Alimenteção de 230VAC a 460VAC • Range de Potencia de 0,15 a 130KW • Torque Máximo: 200% da Nominal • Referenciamento de Velocidade a 16 bit • Filtro EMC integrado* • Circuito de Pré carga integrado • Resistor de Frenagem integrado* SEGURIDAD • Entrada para parada de seguridad (STO) SEGURANÇA • Entrada SafeTorque (STO) TECLADO • Teclado de regulación con display de 5 dígitos. TECLADO •T eclado com display de 5 dígitos PUERTO DE COMUNICACIÓN • Puerto serial RS485 para: - Programación de Pc Windows - Protocolo Modbus • Puerto USB** • CanOpen DS301 y DS402** • Protocolo Profibus DPV0** • Protocolo Ethercat (desarrollo) PORTA DI COMUNICAZIONE •P orta serial RS485 para:1 - Programação Windows PC - Protocolo Modbus • Porta USB** • Protocolo CanOpen DS301/DS402** • Protocolo Profibus DPV0** • Protocolo Ethercat (em desenvolvimento) APLICACIONES SOFTWARE FEEDBACK • Control de Par • Eje Eléctrico • Multiposicionador • Leva electrónica • Corte volante • Bobinadora/desenrollador • Bobinadora en zig-zag • Motopotenciómetro Digital • Entradas impulsos/direcciones • Feedback de Resolver (resolución 16 Bit) • Encoder absoluto BISS/SSI FEEDBACK •R esolver Feedback (16 bit de resolução) • Encoder Absoluto BISS/SSI APLICAÇÕES DE SOFTWARE ENCODER SIMULADO • Controle de Torque • Eixo Eletônico • Multi-posicionamento • Came Eletrônico • Corte em Movimento • Bobinador/Desbobinador • Motopotenciômetro Digital • Entrada Pulso/Direção Salida encoder incremental simulado, Regulador en línea 5V, hasta 16384 impulsos/revolución SIMULAÇÃO DE ENCODER Saída de Simulação de Encoder em Line Drive 5V, até 16384 pulsos/volta E/S ANALÓGICAS PROTECCIONES • 2 entradas analógicas programables • 2 salidas analógicas programables • 1 entrada en frecuencia (dos canales) • Sobretensión de alimentación. • Subtensión de alimentación. • Imagen térmica temperatura del motor. • Sobretemperatura del motor de PTC. • Sobretemperatura del Regulador. • Cortocircuito fase-fase y fase-tierra. • Rotura resolver. • Imagen térmica de la resistencia de frenado. I/O ANALÓGICO •2 Entradas Analógicas programáveis • 2 Saídas Analógicas programáveis • 1 Entrada de Frequencia (2 canais) PROTEÇÕES • Sobtensão de Alimentação • Subtensão de Alimentação • Imagem Térmica Temperatura do Motor • Sobtemperatura do Motor via PTC • Sobtemperatura Drive • Curto circuito entre Fases e entre Fases e Terra • Ruptura do Resolver • Imagem Térmica da Resistência de Frenagem • SALIDA RELÉ REGULADOR OK • SAÍDA A RELÈ DRIVE OK • ALIMENTACIÓN DE LA LÓGICA • ALIMENTAÇÃO PARTE LÓGICA E/S DIGITALES • 8 entradas digitales optoaisladas • 6 salidas digitales optoaisladas I/O DIGITAL • 8 Entradas Digitais optoacopladas • 6 Saídas Digitais optoacopladas * En función de las dimensiones del regulador - Dependendo do tamanho do Drive ** Opcional - Opcional DGM 240 240 VAC Servoregulador brushless digital / Servoacionamento brushless digital TAMANÕS - TAMANHOS 1,5 Alimentación nominal Tensão Nominal VAC 3 4 10 1x 230V+10% -15% - 3x230V+10% -15% 3x 230V +10% -15% Corriente nominal Corrente nominal A 1,5 3 4 10 Corriente de pico para 2” Corrente de pico por 2” A 3 6 8 20 KW 0,42 0,84 1,12 2,8 Potencia de salida (w) Potência de Saída Resistencia de frenato interior Resistência interna de frenagem W RF47R/50W RF100R/90W Resistencia de frenato externo opcional Saída opcional para resitência externa Alimentación DC máx Alimentação DC máxima VDC 200÷360 Alimentación backup encoder sim Alimentação backup para simulação de encoder VAC 230VAC AISLADO +15% -60% (50/60Hz) 230VAC INSULATEDA +15% -60% (50/60Hz) Filtro EMC interior* Filtro EMC integrado* Dimensiones Dimensões Peso Peso Kg T0 T1 T2 1,6 2,6 2,8 = standard = not available - non disponibile * = (en cumplimiento de la norma EMC 61800-3 categoría C3) - (de acordo com a norma EMC 61800-3 cat. C3) DGM 460 460 VAC Servoregulador brushless digital / Servoacionamento brushless digital TAMANÕS - TAMANHOS Alimentación Tensão Nominal 1,3 2,5 6 10 20 VAC 35 45 75 100 150 225 3x400VAC -15% ÷ 3x460VAC +10% ( 50/60Hz ) Corriente nominal Corrente nominal A 1,3 2,5 6 10 20 35 45 75 100 150 225 Corriente de pico para 2” Corrente de pico por 2” A 2,6 5 12 20 40 70 90 150 200 300 450 KW 0,6 1,19 2,86 4,77 9,54 16,69 21,46 40 52 85 130 Potencia de salida (w) Potência de Saída Resistencia de frenato interior Resistência interna de frenagem W RF100R/90W RF82R/ 300W RF82R/600W RF62R/ RF39R/ 2xRF39R/ 1300W 1300W 1300 Resistencia de frenato externo opcional Saída opcional para resitência externa Resistencia de frenato externo sugirió Resistência externa opcional proposta RF18R/ 2000W Dependiente de la carga - Dependendo da carga Alimentación DC máx Alimentação DC máxima VDC 400 ÷ 700 Alimentación de la lógica Alimentação parte lógica VAC 1x 130 ÷ 1x 400 (50/60Hz) Filtro EMC interior * Filtro EMC integrado* EXTERNO -EXTERNO Dimensiones Dimensões Peso Peso T0 Kg T1 1,6 T2 2,6 T3 5,5 T4 5,5 12 T5 12 = standard = no está presente o no disponibile - não presente ou não disponível * = (en cumplimiento de la norma EMC 61800-3 categoría C3) - (de acordo com a norma EMC 61800-3 cat. C3) 20 T6 30 30 32 DGM: CARACTERÍSTICAS / DGM: CARACTERÍSTICA • DGM 240: tensión de línea mono o trifásica de 90 a 240 Vca, o de bus cc. • DGM 460: tensión de línea trifásica de 340 a 460 Vca o de bus cc. • Filtro EMC: incorporado en todos los tamaños de DGM 240, incorporado en los DGM 460 hasta el tamaño 6/12, de proveedor externo para los tamaños superiores. • Circuito de precarga: incorporado en todos los tamaños de DGM. • Circuito de frenado: incorporado en todos los tamaños de DGM. • Resistencias de frenado: incorporadas en todos los tamaños de los DGM 240, incorporadas en los DGM 460 hasta el tamaño 10/20, de proveedor externo para los tamaños superiores. • Control del anillo de velocidad y de corriente completamente digital. • Salida encoder incremental simulado regulador en línea, programable a 256, 1024, 4096 y 16384 impulsos/revolución. • Puerto serial RS485 con protocolo Modbus (RTU). • Puerto USB. • CANBUS con protocolo CANOPEN DS301 y DS402, optoaislado. (opcional). • Protocolo PROFIBUS DPV0 (opcional). • Alimentación de Back-up para encoder simulado 230Vca, aislado. • Puesta en fase automática motor/resolver. • Motor automático. • Gestión de interruptores de fin de carrera. • Control de par programable. • Rampas independientes en los cuatro cuadrantes. • Cuatro velocidades internas programables. • Memorización de las últimas 16 alarmas. • Salida estabilizada +10V/-10Vcc 10mA. • Salida estabilizada +24Vcc 50mA. • Frecuencia de salida 0-400Hz. • Filtro de Notch, para la supresión de las vibraciones. ENTRADAS DIGITALES • 8 entradas PNP optoaisladas, programables. SALIDAS DIGITALES • 6 salidas PNP optoaisladas, programables. • 1 salida con relé para regulador O.K. ENTRADAS DE REGULACIÓN • Analógica diferencial de la referencia de velocidad +/- 10Vcc (300kohm) 16 bit. • Analógica diferencial +/- 10Vcc (300kohm) 10 bit, programable como: - referencia de velocidad auxiliar - referencia de par - referencia de límite de par. • Analógica diferencial +/- 10 Vcc (300kohm) 10 bit, a disposición. • En frecuencia y signo, o encoder regulador en línea 5V ( o 24V con resistencia externa) o encoder regulador en línea 5V hasta 500KHz. SALIDAS ANALÓGICAS • 2 salidas +/- 10Vcc (3 mA) programables como: - referencias de velocidad - velocidad medida - referencia de corriente - corriente medida. PROTECCIONES • Sobretensión de alimentación. • Subtensión de alimentación. • Imagen térmica temperatura motor. • Sobretemperatura motor de PTC. • Sobretemperatura del regulador. • Cortocircuito fase-fase y fase-tierra. • Rotura resolver. • Ausencia +24Vcc auxiliar. • Imagen térmica de la resistencia de frenado. INDICACIONES EN PANTALLA • Código de alarma. • Velocidad – Corriente – Tensión - Posición. ACCESORIOS • Convertidor RS232/485 (CRS485). • Software para programación de PC. • Suministro de cables de conexión resolver y potencia. • Filtros de línea. • DGM 240: tensão de alimentação de 90 to 240 VAC monofasico ou 3-Fase, ou Tensão DC • DGM 460: tensão de alimentação de 340 to 460 VAC, ou Tensão DC • Filtro EMC: Integrado em todos tamanhos do DGM 240, integrado no DGM 460 até o tamanho 6/12, e conexão externa para os tamanhos maiores • Circuito de Pre-carga:Integrado em todos os modelos DGM. • Circuito de Frenagem: Integrado em todos os modelos DGM. • Resistor de Frenagen: Integrado em todos os tamanhos do DGM 240, integrado no DGM 460 até o tamanho 10/20 e conexão externa aos tamanhos maiores. • Controle digital de loop de velocidade e corrente.. • Saída de simulação de encoder incremental em Line Drive 5V, configuração programável para 256, 1024, 4096 e 16384 pulsos/volta. • Porta serial S485 com protocolo Modbus (RTU). • Porta USB. • CANBUS com protocolo CANOPEN DS301 e DS402, optoisolado (opcional). • Protocolo PROFIBUS DPV0 (opcional). • Alimentação de back-up para Simulação de Encoder. • Faseamento automático motor/resolver. • Auto-tuning Motor. • Controle chaves de fim de curso. • Controle de Torque programável. • Rampas independentes nos quatro quadrantes. • 4 velocidades internas programáveis. • Memorização dos últimos 16 alarmes. • Saída estabilizada +10V/-10VDC 10mA. • Saída estabilizada +24 VDC 50mA. • Saída em frequencia 0-400Hz. • Filtro Notch, para supressão de vibração.. ENTRADAS DIGITAIS • 8 Entradas PNP programáveis optoacopladas. SAÍDAS DIGITAIS • 6 Saídas PNP programáveis optoacopladas. • 1 Saída a relé para Drive OK. ENTRADAS DE RESOLUÇÃO •E ntrada analógica diferencial +/-10VDC (300Kohm) 16 bits de referência de velocidade. •E ntrada analógica diferencial +/-10VDC (300Kohm) 10 bits programável como: - rederência de velocidade auxiliar, - referência de torque, - referência de limite de torque. • Entrada analógica diferencial +/-10VDC (300Kohm) 10 bits disponível. •E m frequencia e sinal 5V (ou 24V com res. ext) ou encoder Line Drive 5V até 500KHz. SAÍDAS ANALÓGICAS •2 saídas programáveis +/-10VDC ( 3 mA ) como: - referencia de velocidade - velocidade medida - referência de corrente - corrente medida. PROTEÇÕES • Sobretensão de Alimentação • Subtensão de Alimentação • Imagem térmica da temperatura do Motor • Sobretemperatura do Motor por PTC • Sobretemperatura do Drive • Curto-circuito Fase-Fase e Fase-Terra • Ruptura do Resolver • Falta de alimentação +24VDC auxiliar • Imagem térmica do resistor de frenagem • Entrada p/ bloqueio de segurança (Safe Torque Off) INFORMAÇÕES DISPLAY • Código de Alarmes • Velocidade - Corrente -Tensão - Posição ACESSÓRIOS • Conversor RS232/485 (CRS485) • ACCORD: Ferramenta de programação via PC • Cabos de conexão resolver e potência • Filtro de Rede E D B A C K J4 U J1 V W L AUX 1 L AUX 2 J2 J2 INT B.R. EXT B.R. L3 INT B.R. L2 I N P U T \ O U T P U T -DC BUS +DC BUS J5 L3 L2 L1 E D B AI CN KP U T \ O U I T NP PU UT T \ O U T P U T J4 L AUX 1 L AUX 1 L AUX 2 BUS L-DC AUX 2 +DC BUS -DC BUS INT B.R. EXTBUS B.R. +DC J5 J2 EXTL1 B.R. J5 L3 L2 L1 1.2 DGM: DIMENSIONES / DGM: DIMENSÕES 64 4.5 1.2 64 4.5 31 87,3 166.2 20 87.6 20 11 4.5 11 30.2 40 11 DGM 460 4.5 166.2 1,2 4.5 40 40 4.5 184,4 4.5 DGM 4.5 * ENTER U J1 S L AUX 1 J4 L AUX 2 J1 B U S U F E E D B A C K L AUX 1 V -DC BUS W L AUX 1 F E E D B A C K J4 +DC BUS J4 U J1 V W INT B.R. L AUX 2 L3 INT B.R. J2 L2 EXT B.R. L3 L AUX 1 J2 I N P U T \ O U T P U T EXT B.R. -DC BUS +DC BUS J5 L1 L2 L AUX 2 J2 INT B.R. EXT B.R. J5 L3 L2 L1 4.5 L1 I N P U T \ O U T P U T -DC BUS +DC BUS I N P U T \ O U T P U T J5 L AUX 2 INT B.R. V L1 L AUX 2 31 64 87,3 101,2 1.2 1.2 184,4 166.2 87.6 131.2 31 87,3 T3 40 4.5 38,4 20 * J5 J2 I N P U T \ O U T P U T 4.5 31 87,3 101,2 31 87,3 -DC BUS +DC BUS J2 INT B.R. EXT B.R. 4.5 J5 L3 L2 23.8 152.4 202.4 L1 4.5 I N P U T \ O U T P U T T1 64 4.5 23.8 4.5 1,2 ENTER J3 DGM J3 L AUX 1 267.4 315.5 F I E L D J4 B U S L AUX 2 J4 L3 F E E J2 D B A C K J5 J3 L2 216,4 241 L1 I N U 288 267.4 87.6 .5 Ø6 131.2 INT B.R. EXT B.R. L3 J5 V L AUX 2 T \ O U T P U TJ1 J4 38,4 23.8 31,2 38,4 L3 J5 L1 F I E L D 4.5 J3 1.2 * F E E D B A C K J4 I N P U T \ F OI UE TL PD UB T U S J5 184,4 T2 30 183.6 20 F E E D B A C K I N P U T \ O U T P U T ESC J3 L AUX 2 F I E L D B U S J3 F I E L D J4 F E E D B A C K J5 I N P U T \ O U T P U T B U S F I E L D J4 F E E D B A C K B U S J4 42,5 ENTER J3 ENTER ESC ENTER L AUX 1 F E E D B A C K 35 * ESC * Ø6.5 DGM 460 DGM 460 4.5 35 30 183.6 87.6 286,6 30 1,2 * I N P U T \ O U T P U T 246 1.2 DGM 460 F I E L D 215.9 215.9 23.8 249 4.5 33 B U S 4.5 33 J5 I N P U T \ O U T P U T Ø6.5 ENTER ESC * 1.2 20 DGM 460 87.6 20 131.2 152.4 202.4 31 87,3 23.8 101,2 152.4 202.4 MOTOR POWER CONNECTOR 87.6 131.2 20 152.4 202.4 F E E D B A C K J5 I N P U T \ O U T P U T * -DC BUS +DC BUS INT B.R. J2 EXT B.R. J5 L2 L2 23.8 B U S F E E D B A C K J2 L3 EXT B.R. 4.5 W 33 W BUS -DC MOTOR POWER CONNECTOR INT B.R. J2 20 J4 31 87,3 +DC BUS 4.5 J1 F I E L D 183.6 T4 J1PU U L AUX 1 4.5 I N P U T \ O U T P U T J1 33 31,2 J5 4.5 20 L1 ENTER -DC BUS ESC +DC BUS EXT B.R. 231,4 20 23.8 184,4 F E E D B A C K +DC BUS 4.5 246 B U S V J1 W -DC BUS 4.5 20 ENTER W V V V J4 20 40 INT B.R. U U W L AUX 2 184,4 23.8 ESC DGM 460 ESC U B U S I N P U T \ O U T P U T J5 \ O U T P U T L1 166.2 DGM 460 11 L1 T ENTER J5 * F I E L D J3 F E E D B A C K N P U T \ O U T P U T J5 L3 I N P U J2 ESC MOTOR POWER L AUX 1 CONNECTOR 1,2 23.8 4.5 INT B.R. EXT B.R. L2 184,4 B U S J4I J2 L2 L2 87.6 4.5 305.6 297.7 285 288 1,2 4.5 152.4 20 152.4 INT B.R. ENTER F I E L D E E D B A C K EXT B.R. +DC BUS * 23.8 23.8 DGM L AUX 2 +DC BUS * E L D L AUX 1 J3 1.2 * F L AUX 2 F E E D B A C K J4 327.9 L AUX 2 42,5 ENTER I J4 B U S 4.5 L3 380 J1 V ENTER J3F -DC BUS 368.5 J4 U W L1 L AUX 1 L1 31 87,3 101,2 J5 L3 J5 L2 I N P U T \ O U T P U T L2 F E E D B A C K I N P U T \ O U T P U T J2 L3 38,4 35 DGM 460 J3 40 L AUX 1 231,4 J2 J5 INT B.R. EXT B.R. J4 I N P U T \ O U T P U T -DC BUS +DC BUS F E E D B A C K W 31,2 30 -DC BUS 216,4 B U S 20 23.8 F I E L D 327.9 B U S F E E D B A C K L AUX 2 11 267.4 231,4 241 232 216.4 V -DC BUS +DC BUS L AUX 1 INT B.R. L AUX 2 EXT B.R. -DC BUS L3 +DC BUS L2 INT B.R. L1 EXT B.R. F I E L D J3 J4 J1 U L AUX 1 L AUX 2 ENTER E D B A C K 184,4 215.9 184,4 1,2 B U SESC 241 F J3 E J4 J4 L AUX 1 F I E L D * F E E D B A C K W B U S 1.2 184,4 1,2 4.5 ESC ENTER * * J1 V F I E L D J1 V W 216,4 ESC B U S ESC J3 288 216,4 241 231,4 U DGM E L D B U S U F J3 F I E L D J3 I ENTER J3 1,2 20183.6 DGM 460 ESC 297.7315.5 380 288 368.5 305.6 267.4 327.9 285 297.7 ENTER ENTER 4.5 DGM 460 DGM ESC 31 87,3 ENTER 297.7 241 216,4 241 231,4 4.5 31 87,3 101,2 DGM 460 4.5 ESC I N P U T \ O U T P U T J5 Ø6.5 DGM ESC J5 87.6 152.4 33 87.6 4.5 I N P U T \ O U T P U T J2 L3 4.5 4.5 11 460 40 DGM DGM ESC INT B.R. EXT B.R. 20 4.5 380 11 31,2 368.5 4.5 40 L3 L2 L1 4.5 20 23.8 EXT B.R. L AUX 2 4.5 20 23.8 11 J5 MOTOR POWER L1 CONNECTOR 166.2 F E E D B J2 A C K J4 INT B.R. L AUX 1 -DC BUS +DC BUS I N P U T \ O U T P U T J1 J2 L2 * -DC BUS +DC BUS L1 U INT B.R. 1,2 J1L AUX 2 L2 L3W 152.4 F E E D B A C K J4 L AUX 1 V EXT B.R. 4.5 B U S J5 F E E D B A C K J4 B U S L AUX 1 U W I N P U T \ O U T P U T -DC BUS TØ 30.2 J2 J1 L3 L2 W J3 +DC BUS 4.5 64 23.8 J3 W V F I E L D -DC BUS +DC BUS EXT B.R. U J1 F I E L D V J4 * * B U S U F E E D B A C K ENTER 351.7 F E E D B A C K J3 B U S 351.7 V F I E L D ENTER ESC 351.7 B U J3 ESC * B U S W F I E L D 241 232 216.4 F I E L D J3 216,4 231,4 241 216,4 232 216.4 241 * F I E L D J3 J3 * 288 241 267.4 231,4 ENTER ESC DGM 241 241 231,4 231,4 216,4 216,4 ENTER ESC 297.7 DGM F I E L D L1 I N P U T \ O U T P U T .5 Ø6 1.2 23.8 215.9 .5 Ø6 V W 1.2 J1 33 246 184,4 30 33 20 35 42,5 4.5 87.6 131.2 249 183.6 20 249 1.2 30 1.2 286,6 30 183.6 MOTOR POWER CONNECTOR 1,2 183.6 246 U 286,6 215.9 T5 Ø6.5 23.8 4.5 288 ESC 4.5 ENTER ESC 267.4 DGM ENTER 327.9 40 297.7 ESC 380 11 4.5 368.5 DGM DGM 30.2 * Dejar 6 cm de espacio para los conectores - Deixar 6 cm de espaço para os conectores DGM 460 Medidas en milímetros - Medidas em milimetros. 152.4 23.8 31,2 38,4 183.6 33 ESC 30 Ø6.5 ENTER F I E 35 42,5 42,5 DGM: SOFTWARE DGM ACCORD: La programación estándar de teclado puede realizarse vía PC con ACCORD, un instrumento software específico para Sistemas Operativos Microsoft Windows. ACCORD vuelve aún más simple el acceso a toda la serie de funciones del convertidor, permite optimizar la calibración del regulador y de ejecutar la copia de respaldo de los parámetros. Accord tiene a disposición un instrumento osciloscopio profesional para visualizar y analizar las variaciones de los valores del regulador. La comunicación se realiza a través de la línea RS-485 y de un KIT de conversión RS232 o puerto USB. CARACTERÍSTICAS PRINCIPALES: • Configuración del Regulador • Lectura, carga y memorización de los parámetros del regulador • Osciloscopio de 4 canales configurables con posibilidad de registro, memorización e impresión de las medidas realizadas • Autoajuste y autocorrección del desfase del motor • Selección y configuración de la Modalidad operativa: - Control del Par - Control en límite del par - Control de velocidad y posicionador - Multiposicionador - Eje Eléctrico - Leva Electrónica - Corte volante - Bobinadora - Bobinadora en zig-zag. Accord DGM ACCORD: A programação standard do teclado pode ser feito pelo PC com o ACCORD, uma ferramenta de programação para sistema operacional Microsoft Windows. ACCORD torna fácil o acesso a todas as características do DGM. Ele permite a você a otimização do Drive, back-up da configuração e seleciona as opções de redes de campo. ACCORD oferece um osciloscópio profissional em tempo real. O Software é conectado através da porta serial RS485 e kit de conversão da porta RS232 ou porta USB. PRINCIPAIS CARACTERÍSTICAS: • Configuração do Drive •P ossibilidade de Ler, Carregar e Salvar os parâmetros de configuração •4 canais configuráveis de osciloscópio. Permite gravar, salvar e imprimir as medidas • Autotuning e autophasing do motor •S eleção e configuração dos modos de operação: - Controle de Torque - Controle de limite de Torque - Controle de velocidade e posicionamento - Multiposicionamento - Eixo Eletônico - Came Eletônico - Corte em movimento (Flying shear) - Bobinador - Desbobinador DGM: FIRMWARE APLICACIONES DGM se ha diseñado para conectarse a sistemas CNP, PLC y a Cuadros de Operador (PO), a través tanto de las tecnologías analógicas tradicionales, como de Bus de campo digitales. Los protocolos digitales implementados son el Modbus (RTU), CanOpen DS301 y DS402 y Profibus DPV0 (EtherCAT en desarrollo). El regulador DGM integra varias soluciones software para sectores específicos de la automatización. APLICAÇÕES DGM foi projetado para integração com controle de movimentos como CNC, PLC e IHMs, conectados usando tanto tecnologia analógica como redes digitais. Os protocolos digitais implementados são Modbus (RTU), CanOpen DS301 e DS402 e Profibus DPV0 (EtherCAT em desenvolvimento). O Drive DGM oferece muitas soluções de softwares aplicativos específicos para os campos de automação. Slave Slave LEVA ELECTRÓNICA Master APLICACIONES TÍPICAS: empacadoras, máquinas alimentarias. máquinas para impresión flexográficas, etiquetadoras.. Modbus Profibus CANopen CAME ELETÔNICO APLICAÇÕES TÍPICAS: máquinas embalagens, máquinas de impressão, máquinas de alimentos, máquinas etiquetadoras. MULTIPOSICIONADOR APLICACIONES TÍPICAS: empacado, pick&place, paletizadoras, encoladoras, perforadoras, punzonadoras, manipuladoras. MULTI-POSICIONAMENTO APLICAÇÕES TÍPICAS: embalagens, pick and place, máquinas paletizadoras, sistema de colagem, furação, fresagem, máquinas de furação. Modbus Profibus CANopen Eje Eléctrico / Eixo Eletônico EJES INTERPOLADOS Y EJE ELÉCTRICO Slave APLICACIONES TÍPICAS: máquinas para corte de láser, plasma, agua, máquinas de ejes interpolados, fresadoras. Master EIXOS INTERPOLADOS E EIXO ELETÔNICO APLICAÇÕES TÍPICAS: plasma, laser, máuinas de corte jato d´água, máquinas CNC, fresadoras. CanOpen Ejes Interpolados Eixos Interpolados Master Slave CORTE VOLANTE APLICACIONES TÍPICAS: impresoras, empacadoras, cintas sincronizadas, cortadoras.. FLYING SHEAR ModBus CanOpen APLICAÇÕES TÍPICAS: impressão/estamparia, embalagens, transportadores sincronizados, sistema de corte em movimento, faca rotativa. BOBINADORA Y BOBINADORA EN ZIG ZAG APLICACIONES TÍPICAS: máquinas textiles, operaciones de bobinado en zig zag, máquinas envolvedoras para la elaboración de metal y papel, máquinas para impresión flexográficas. BOBINADOR E DESBOBINADOR APLICAÇÕES TÍPICAS: máquinas de bobinas texteis, máquina de bobinamento para metal e papel e desbobinamento para máquinas texteis e máquinas de confecção de cabos. Master Slave 02.2010 IN THE ELECTRONIC SCHIO PIOVENE THIENE SCHIO MONTE DI MALO THIENE SCHIO HDT Vi a Si l e MALO A31 VALDAGNO Priabona DUEVILLE SS46 MALO SS46 VICENZA TREVISO VICENZA NORD VICENZA OVEST VICENZA A4 VICENZA EST MILANO © HDT 2009. La información de este folleto sólo tiene carácter orientativo y no forma parte de ningún contrato. No se puede garantizar su exactitud porque HDT aplica un proceso continuado de desarrollo y se reserva el derecho a modificar las especificaciones de sus productos sin previo aviso. A4 VENEZIA © HDT 2009. A informação contida neste folheto é apenas para orientação e não fazem parte de nehum contrato. A precisão não possa ser garantida pois a HDT tem um processo continuo de desenvolvimento e nos reservamos o direito de alterar as especificações dos seus produtos sem um aviso prévio. H.D.T. srl Via Sile, 8 - 36030 Monte di Malo (VI) Italy Tel: +39.0445.602744 - Fax: +39.0445.602668 - EMail: [email protected] - www.hdtlovato.com E P
Baixar