21º Congresso Brasileiro de Engenharia Sanitária e Ambiental
X-004 - SISTEMA DE AUTOMAÇÃO DE BAIXO CUSTO PARA ESTAÇÕES
COMPACTAS DE TRATAMENTO DE ESGOTO SANITÁRIO
Celso J. Munaro
Engenheiro Eletricista pela Universidade Federal de Santa Maria. Mestre e Doutor em
Automação pela Universidade Estadual de Campinas. Professor do Departamento de
Engenharia Elétrica da Universidade Federal do Espírito Santo. Suas áreas de interesse
são automação industrial e estimação e controle robustos.
Leonardo Pereira Bastos
Engenheiro Eletricista pela Universidade Federal do Espírito Santo. Atualmente presta
serviços na área de automação industrial e é aluno do Mestrado em Automação da UFES.
Endereço: DEL-CT-UFES. Av. Fernando Ferrari, s/n – Bairro Goiabeiras - Vitória - ES - CEP: 29060-900 Brasil - Tel: (27) 335-2687 - e-mail: {munaro,bastos}@ele.ufes.br.
RESUMO
São apresentadas neste artigo propostas de automação de baixo custo para estações compactas de tratamento
de esgoto sanitário. Estas estações exigem a realização de algumas operações de rotina facilmente
implementáveis em um sistema de automação. Entretanto, o menor custo destas estações implica em que o
sistema de automação proposto seja adequadamente projetado para se tornar viável. Uma das propostas
apresentadas envolve o uso de um controlador lógico programável, e a outra o uso de um sistema
microcontrolado desenvolvido no Departamento de Engenharia Elétrica da UFES. Ambas apresentam um
custo compatível com o custo total da estação de tratamento considerada, que atende a 1000 habitantes. A
proposta usando sistema microcontrolado permite o registro de informações e uma interface com o usuário,
além de permitir a baixo custo medições e controles adicionais que melhoram a qualidade da operação do
processo.
PALAVRAS-CHAVE: Automação industrial, tratamento de esgoto sanitário, controle de processos,
operação desassistida .
INTRODUÇÃO
Estações de Tratamento de Esgoto (ETEs) compactas com baixa produção de lodo e baixo impacto ambiental
têm sido desenvolvidas como soluções para regiões densamente povoadas ([1]). Entretanto, sistemas assim
construídos demandam procedimentos de operação mais elaborados para garantir a eficiência no tratamento
do esgoto. A ETE de que trata este artigo consiste na associação de um reator anaeróbio de manta de lodo
(Upflow Anaerobic Sludge Blanket - UASB) e um biofiltro aerado submerso (BF), com capacidade para
atender a uma população de 1000 habitantes, tendo como características principais: compacidade, alta
eficiência, produção de energia e baixa produção de lodo. A automação descrita neste trabalho garante o
correto funcionamento dos principais processos que envolvem operações que devem ser executadas a
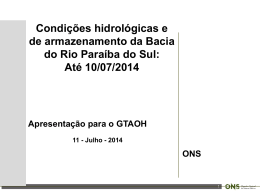
intervalos regulares, alertando o operador para eventuais falhas. Um diagrama de blocos básico da estação de
tratamento de esgoto é mostrado na figura 1.
O esgoto chega à ETE pela elevatória. A bomba da elevatória leva este esgoto e o lodo que é descartado do
BF após a sua lavagem ao UASB, que efetua o tratamento anaeróbio. Neste reator ocorre a liberação de
biogás e a produção de lodo pelas bactérias metanogênicas. Este lodo deve ser descartado de tempos em
tempos. Em seguida, o esgoto é levado ao biofiltro, responsável pelo tratamento aeróbio. O aerador é o
responsável pela injeção de ar neste reator. O biofiltro também produz lodo, sendo necessárias lavagens
periódicas para redução do mesmo.
ABES – Trabalhos Técnicos
1
21º Congresso Brasileiro de Engenharia Sanitária e Ambiental
Biogás
Esgoto
Efluente
Elevatória
UASB
Biofiltro
Lodo
Descartado
Aerador
Lodo da Lavagem
Figura 1. Diagrama de blocos da ETE
DESCRIÇÃO DA AUTOMAÇÃO
Descrevemos agora os diversos automatismos que podem ser introduzidos na ETE descrita e as soluções
propostas usando um controlador lógico programável (CLP) e um sistema microcontrolado desenvolvido para
esta finalidade. O CLP utilizado tem apenas 20 pontos de entrada CA e 12 pontos de saída a relé. Possui 1K
de memória do usuário, memória EEPROM embutida, canal de comunicação RS-232, mais de 65 instruções
de programação e tamanho bastante reduzido. O sistema microcontrolado é descrito em [2], e foi
desenvolvido no Departamento de Engenharia Elétrica da UFES, dentro de projetos de pesquisa
desenvolvidos em conjunto com o Departamento de Hidráulica e Saneamento, também da UFES. Trata-se de
uma placa baseada no microcontrolador INTEL 80C196, que se comunica com um computador via saída RS232. O usuário interage com a mesma através de programa instalado no PC, tendo acesso aos dados medidos
através de um mostrador de 2 linhas e 16 caracteres.
ELEVATÓRIA
A elevatória é composta basicamente por um reservatório, onde o esgoto que será posteriormente tratado é
armazenado até ser bombeado para o UASB. Como é comum que a vazão do esgoto ao longo do dia sofra
variações consideráveis, o uso de um inversor de freqüência para obter variações contínuas de vazão da
bomba é aconselhável. O controle de velocidade da bomba centrífuga se justifica, pois há uma redução
significativa no número de partidas do motor, o que aumenta bastante a sua vida útil. Há ainda uma grande
economia de energia fazendo a bomba funcionar abaixo da sua velocidade nominal. Em uma bomba
centrífuga, a vazão varia proporcionalmente e a potência varia com o cubo da velocidade, fazendo com que a
50% da vazão (ou velocidade) nominal, a potência fique reduzida a 13%.
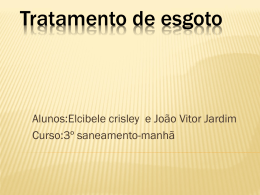
O objetivo do sistema de controle a ser instalado consiste em controlar a vazão da bomba a partir da
informação da vazão ou nível de afluente que chega à elevatória. A solução com CLP é mostrada na figura 2.
Utilizamos, quatro sensores de nível de baixo custo para a detecção do nível para o ajuste da velocidade da
bomba.
Para conseguir controlar a velocidade da bomba, via inversor, o CLP empregado utiliza três de suas saídas
digitais para enviar uma seqüência binária de três bits ao inversor. Essa seqüência de bits define qual das sete
velocidades previamente programadas no inversor deve ser aplicada à bomba. Os valores dessas velocidades
são encontrados na análise do comportamento de variação da vazão ao longo do dia, que pode ser obtido a
partir de um hidrograma. Para manter a vazão da bomba mais próxima possível da vazão do esgoto usando
as informações dos sensores de nível, adotou-se a estratégia de decrementar ou incrementar a velocidade da
mesma quando o nível atingir os sensores 1 e 2 ou 3 e 4, respectivamente. Considera-se a região entre os
sensores 2 e 3 como sendo uma região em que o nível deve ser mantido. Caso ocorra uma redução na vazão
de entrada, tornando a vazão bombeada maior que a vazão de chegada no reservatório, o nível irá abaixar e o
sensor de nível 2 irá indicar. O CLP iniciará uma rotina de tentativa de correção. Nesta rotina, a cada
intervalo de tempo estabelecido, o controlador reduzirá a velocidade da bomba de um certo ∆, mudando para
a velocidade, dentre os sete valores pré-programados, imediatamente inferior a que possuía antes de entrar
2
ABES – Trabalhos Técnicos
21º Congresso Brasileiro de Engenharia Sanitária e Ambiental
nesta região. Se todas as velocidades forem tentadas e mesmo assim o nível chegar no sensor de nível 1, o
CLP sinalizará indicando alarme de nível mínimo, desligará a bomba e permanecerá nesta condição até que o
sensor de nível 2 seja atuado, quando retorna à condição normal de operação.
Figura 2. Controle da elevatória via CLP
Já em situação dual à anterior, caso ocorra um aumento na vazão de entrada, tornando-a maior que a vazão
atual que a elevatória bombeia para o UASB, ocorrerá uma nova mudança de região de funcionamento para a
região de incremento de velocidade. Ao cruzar o limite da região acionando o sensor de nível 3, o CLP
iniciará uma nova rotina de tentativa de correção. Nesta rotina, a cada intervalo de tempo estabelecido, o
controlador aumentará a velocidade da bomba de um certo ∆, mudando para a velocidade, dentre os sete
valores pré-programados, imediatamente superior a que possuía antes de entrar nesta região. No caso da ETE
ser bem projetada, espera-se que, com a bomba e o esgoto afluente em suas vazões máximas, não ocorra o
transbordo da elevatória, a não ser que a bomba apresente defeito ou a tubulação entre a elevatória e o UASB
esteja entupida. Nestes casos, o inversor detecta um problema com a bomba ou uma sobrecarga,
respectivamente, e o CLP irá emitir um alarme apropriado ao operador da ETE. Uma possível falha nos
sensores de nível pode ser detectada através da análise realizada pelo CLP de combinações impossíveis para
os sensores de nível.
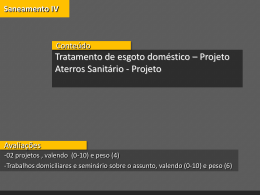
A solução usando o sistema microcontrolado com transdutor de ultra-som é mostrada na figura 3. O
transdutor de ultra-som fornece continuamente a informação de nível, que por sua vez permite o cálculo e o
controle da vazão, o que não era possível no caso anterior. O microcontrolador fornece uma saída 0-10V para
controle do inversor. Assim, tanto o controle de nível quanto de vazão são possíveis.
REATOR ANAERÓBIO DE MANTA DE LODO (UASB)
Não há nenhuma operação que ocorra com muita freqüência no UASB, por isso não se implementou
nenhuma automação. O descarte de manta e leito de lodo para esta ETE ocorre muito esporadicamente, não
justificando o investimento em válvulas automáticas. Entretanto, o monitoramento do pH neste reator pode
prevenir má operação do processo devido a condições inadequadas para as bactérias anaeróbias. A medida da
produção de biogás também é um bom indicativo da atividade das bactérias metanogênicas. Estas duas
medidas foram implementadas através do sistema microcontrolado, utilizando sondas comerciais com
circuitos condicionadores de sinais, podendo fazer parte do sistema de automação proposto.
ABES – Trabalhos Técnicos
3
21º Congresso Brasileiro de Engenharia Sanitária e Ambiental
Figura 3. Controle da elevatória via microcontrolador
BIOFILTRO
O processo de controle do BF compreende duas fases bem distintas: a operação normal e a operação de
lavagem. Na operação normal, um ajuste do nível de aeração deve ser feito, garantindo condições para a
atividade aeróbia. A figura 4 apresenta um pequeno esquema do BF com os sensores e válvulas a ele
interligados. As operações de lavagem devem ser feitas periodicamente (a cada 1 ou 2 dias) , envolvem uma
série de acionamentos de válvulas e bombas e devem ser feitas preferencialmente fora de horários de pico, daí
a importância de automatizá-las.
Figura 4. Biofiltro e equipamentos associados
Para a lavagem do BF, são necessários dois sensores de nível de baixo custo, duas válvulas pneumáticas, duas
válvulas solenóides para controle das válvulas pneumáticas e uma válvula solenóide para injetar ar com
maior pressão que a normal, no momento da lavagem do BF. Estando em um horário adequado e com o
reservatório da elevatória em seu nível mínimo, inicia-se o processo de lavagem executando as seguintes
operações:
4
ABES – Trabalhos Técnicos
21º Congresso Brasileiro de Engenharia Sanitária e Ambiental
1.
2.
3.
Fecha-se válvula do efluente do BF e liga-se a bomba do reservatório (água para lavagem);
Aguarda-se o nível do reator atingir o nível máximo;
Liga-se a aeração com fluxo de ar máximo durante um tempo pré-definido, através da válvula de ar de
lavagem (tipo liga-desliga);
4. Desliga-se a aeração e abre-se a válvula de descarte de lodo;
5. Quando atingir o nível do reator atingir o mínimo, fecha-se a válvula de descarte do lodo;
6. Repete-se o procedimento durante um número programado de vezes, até lavar adequadamente o BF.
Todas as operações acima são do tipo liga-desliga, e podem assim ser executadas pelo CLP, a partir da
decisão do operador ou de uma programação horária. Outra possibilidade para decidir sobre efetuar a
lavagem é através da medida da perda de carga. Para isto, basta que a perda de carga atinja um nível prédefinido, e uma entrada digital do CLP pode ser usada para detectá-lo e iniciar a lavagem.
O controle do nível de aeração também é importante para evitar falta de oxigênio (OD) às bactérias aeróbias
ou consumo desnecessário de energia, causado por aeração excessiva. Para isto, o oxigênio dissolvido deve
ser medido e uma válvula de controle proporcional deve ser usada, substituindo a válvula tipo liga-desliga
utilizada. Neste caso, o sistema microcontrolado é utilizado, por possuir recursos de entrada e saída analógica
não disponíveis no CLP de baixo custo utilizado. Uma sonda de OD é ligada à placa microntrolada e um
sinal de tensão (0-10V) aciona a válvula proporcional.
COMENTÁRIOS SOBRE AS PROPOSTAS
A tabela 1 permite visualizar as operações automáticas possíveis em cada uma das propostas, usando CLP ou
o sistema microcontrolado.
Tabela 1. Análise comparativa entre as propostas.
Processo
Característica
Elevatória
Controle de nível
Controle de vazão
UASB
Medida de pH
Medida de vazão de biogás
BF
Operação de lavagem
Medida de OD
Controle da aeração
Decisão sobre a lavagem
Interface
Leitura de dados medidos
Emissão de relatórios
CLP
X
X
X
µcontrolador
X
X
X
X
X
X
X
X
X
X
As duas propostas apresentadas envolvem a aquisição de válvulas automáticas empregadas na lavagem do BF
e o inversor utilizado para controlar a vazão na elevatória. Os sensores utilizados para a detecção de nível
têm custo muito baixo. Ambas propostas permitem o controle da elevatória, a realização das lavagens bem
como a decisão automática sobre quando fazê-lo. A diferença de custo entre o CLP e o sistema
microcontrolado com medição de nível é pequena, com a vantagem de que o sistema microcontrolado
permite um controle mais preciso do inversor. Uma análise feita estimou o custo do sistema de automação em
20% do custo da ETE.
Um avanço em relação a esta proposta de menor custo envolve a medição de pH, biogás e OD, e, com estas
informações monitorar o funcionamento do reator anaeróbio e controlar o nível de aeração.
CONCLUSÕES
Neste trabalho foram apresentadas duas propostas de automação de baixo custo aplicáveis a uma ETE
compacta tipo UASB+BF: uma usando um controlador lógico programável de baixo custo e outra usando um
ABES – Trabalhos Técnicos
5
21º Congresso Brasileiro de Engenharia Sanitária e Ambiental
sistema microcontrolado desenvolvido. Ambas propostas permitem realizar com baixo custo as operações de
rotina da ETE, contribuindo assim para melhorar a eficiência do processo e reduzir as possibilidades de
falhas. Com um custo um pouco maior, o sistema microcontrolado permite também o monitoramento e
registro de informações adicionais, além de permitir o controle do nível de aeração.
REFERÊNCIAS BIBLIOGRÁFICAS
1.
Gonçalves,R.F., Bof,V.S., Araújo,V.L., (1998) - Balanço energético e produção de lodo em uma ETE do
tipo UASB + biofiltros aerados submersos - Anais do VIII SILUBESA / ABES, Vol. 1, pp. 398 - 406, J
2. Munaro,C.J., Amaral,P.F.S, Bastos,L.P., Costa,W.T., Vivacqua,R.D.P., (2001), Sistema de medição
microprocessado para estações compactas de tratamento de esgoto sanitário, Anais 210 CBESA, artigo a ser
apresentado.
6
ABES – Trabalhos Técnicos
Baixar