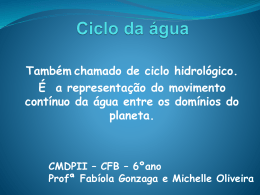
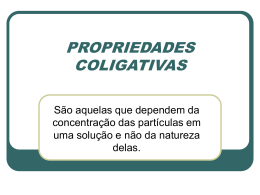
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO DEPARTAMENTO ACADÊMICO DE ELETRÔNICA ESPECIALIZAÇÃO EM AUTOMAÇÃO INDUSTRIAL ALINE DE OLIVEIRA BUENO ESTUDO DO CONTROLE DE NÍVEL DE UM TUBULÃO EM UM SISTEMA DE GERAÇÃO DE VAPOR MONOGRAFIA - ESPECIALIZAÇÃO CURITIBA 2011 ALINE DE OLIVEIRA BUENO ESTUDO DO CONTROLE DE NÍVEL DE UM TUBULÃO EM UM SISTEMA DE GERAÇÃO DE VAPOR Monografia de conclusão do curso de Especialização em Automação Industrial do Departamento Acadêmico de Eletrônica da Universidade Tecnológica Federal do Paraná apresentada como requisito parcial para obtenção do grau de Especialista em Automação Industrial. Prof. Dr. Carlos Raimundo Erig Lima CURITIBA 2011 Ministério da Educação Universidade Tecnológica Federal do Paraná Diretoria do Campus Curitiba Gerência de Pesquisa e Pós-Graduação Departamento Acadêmico de Eletrônica _______________________________________________________________ TERMO DE APROVAÇÃO PROPOSTA DE CONTROLE DE NÍVEL DE UM VASO EM UM SISTEMA DE GERAÇÃO DE VAPOR Área de conhecimento: Automação Eletrônica de Processos Elétricos e Industriais por Aline de Oliveira Bueno A presente monografia, requisito parcial para obtenção do título de ESPECIALISTA EM AUTOMAÇÃO INDUSTRIAL, foi avaliada pela banca examinadora, constituída pelos docentes abaixo discriminados, que considerou o trabalho Aprovado. ____________________________________ ____________________________________ Prof. Dr. Ségio Leandro Stebel Prof. M.Sc. Guilherme Alceu Schneider ______________________________________ Prof. Dr. Carlos Raimundo Erig Lima Orientador Curitiba, 11 de Março de 2011. Visto da coordenação _____________________________________ Prof. Dr. Jean Marcelo Simão A Folha de Aprovação assinada encontra-se na Coordenação do Curso. AGRADECIMENTOS A colaboração e compreensão de meus amigos, familiares, professores e colegas de trabalho foi fundamental à elaboração deste estudo. Agradeço inicialmente aos meus pais, que sempre foram os principais responsáveis pela minha educação e pela minha formação. Agradeço aos meus amigos, minha irmã e colegas, por seu incentivo e compreensão durante a execução do Curso de Especialização e elaboração deste estudo. Agradeço também a todos os professores do Curso de Especialização em Automação Industrial da UTFPR que contribuíram na expansão dos meus conhecimentos. Em especial agradeço ao meu orientador, pela dedicação e atenção a mim despendidas, que foram essenciais para o desenvolvimento deste estudo e para a consolidação dos novos conhecimentos adquiridos. “A mente que se abre a uma nova idéia jamais voltará ao seu tamanho original.” (EINSTEIN). RESUMO BUENO, Aline de Oliveira. Estudo do controle de nível de um tubulão em um Sistema de Geração de Vapor. 2010. 85 p. Monografia (Especialização em Automação Industrial) Programa de Pós-Graduação Departamento Acadêmico de Eletrônica, UTFPR, Curitiba, 2010. Este trabalho tem por objetivo o estudo de um controle de nível em um vaso de geração de vapor. Inicialmente apresenta o histórico desta aplicação e as dificuldades intrínsecas a este processo, tais como a resposta inversa e o fenômeno de contração e expansão. Na sequência apresenta o estudo de um controle focado em simulações do software Matlab/Simulink. O sistema em malha fechada simulado permite a análise dos problemas desta categoria particular de processo. Palavras-Chaves: Controle de nível; Gerador de Vapor; Resposta Inversa; Simulações em Matlab/Simulink. ABSTRACT BUENO, Aline de Oliveira. Proposta de controle de nível de um vaso em um Sistema de Geração de Vapor. 2010. 85 p. Monografia (Especialização em Automação Industrial) Programa de Pós-Graduação Departamento Acadêmico de Eletrônica, UTFPR, Curitiba, 2010. The objective of this research is to study a steam generator boiler level control. First this research shows the history of this application and the difficulties intrinsic of this process, so as the reverse response or the shrink and swell phenomena. In sequence it is shown the study of the process control with a focus on simulations with Matlab/Simulink software. The close loop simulated system allows the analysis of the frequently problems of this particular process category. Key Words: Level control; Boiler; Inverse Response; Shrink and Swell; Simulations with Matlab/Simulink. LISTA DE FIGURAS Figura 1- Caldeira Radiante à gás natural ou óleo (Babcock & Wilcox Co) ........................... 9 Figura 2 - Arranjo típico da Geração de Vapor através da recuperação de calor................. 10 Figura 3 - Compensador do fenômeno shrink and swell, em função da taxa de variação da vazão de vapor ou da pressão do vaso..................................................................................... 17 Figura 4 - Resposta inversa característica do nível de líquido em um vaso gerador de vapor. .................................................................................................................................................. 17 Figura 5 - Desenho esquemático do volume de controle do vaso gerador de vapor. ............. 18 Figura 6 - Diagrama de Blocos do Processo........................................................................... 20 Figura 7 - Controle de alimentação de água com dois elementos........................................... 22 Figura 8 - Controle de alimentação de água com três elementos. .......................................... 23 Figura 9 - Exemplo de Controle Feedforward......................................................................... 24 Figura 10 - Diagrama de blocos do controle antecipatório.................................................... 25 Figura 11 - Exemplo de Controle Feedback. ........................................................................... 26 Figura 12 - Diagrama de blocos do controle de nível de um vaso gerador de vapor utilizando o controlador MFA................................................................................................................... 29 Figura 13 - Modelo e simulação de um sistema gerador de vapor apresentado pelo Matlab®. .................................................................................................................................................. 32 Figura 14 - Bloco Boiler: Modelo baseado nas tabelas de vapor. .......................................... 33 Figura 15 – Linhas de comando de geração dos dados do ponto de operação. ..................... 34 Figura 16 – Resultado da geração dos dados do ponto de operação...................................... 34 Figura 17 – Linhas de comando do projeto do controlador.................................................... 35 Figura 18 – Resultado da simulação do controle de pressão do vaso gerador de vapor. ...... 36 Figura 19 – Estrutura incluída na simulação proposta........................................................... 37 Figura 20 - Resposta do processo a um degrau unitário......................................................... 38 Figura 21 - Diagrama de blocos da simulação. ...................................................................... 38 Figura 22 - Estrutura adotada para o PID industrial em série com filtro de 1ª ordem. ......... 39 Figura 23 - Arquitetura Clássica ............................................................................................. 40 Figura 24 - Arquitetura Alternativa......................................................................................... 41 Figura 25 – Linhas de comando para o modelo matricial. ..................................................... 42 Figura 26 – Linhas de comando para o modelo espaço de estados, modelo discreto............. 42 Figura 27 – Linhas de comando para a conversão do modelo de espaço de estados em função de transferência........................................................................................................................ 43 Figura 28 – Linhas de comando para o modelo jacobiano. .................................................... 45 Figura 29 - Linhas de comando para o modelo espaço de estados, modelo discreto. ............ 45 Figura 30 – Linhas de comando para a conversão do modelo de espaço de estados em função de transferência........................................................................................................................ 46 Figura 31 – Comportamento da vazão de vapor pela variação da água de alimentação....... 49 Figura 32 – Comportamento da variação do nível do vaso gerador de vapor. ...................... 50 Figura 33 - Resposta do controlador P (ITSAE) a um degrau unitário. ................................. 51 Figura 34 - Resposta do controlador PI (ITSAE) a um degrau unitário................................. 51 Figura 35 - Resposta do controlador PID (ITSAE) a um degrau unitário. ............................. 52 Figura 36- Resposta do controlador PID com filtro (ITSAE) a um degrau unitário. ............. 52 Figura 37 - Resposta do controlador P. .................................................................................. 53 Figura 38 - Resposta do Controlador PI ................................................................................. 54 Figura 39 - Resposta do controlador PID. .............................................................................. 54 Figura 40- Diagrama de controle e instrumentação do modelo de......................................... 55 Figura 41- Diagrama do processo simulado, interface Simulink. ........................................... 56 Figura 42 – Comportamento dos distúrbios do processo. ....................................................... 57 Figura 44 - Resposta do controle apresentado para a estrutura de dois elementos. .............. 57 Figura 44 - Diagrama do processo simulado, interface Simulink. .......................................... 58 Figura 45 - Resposta do controle apresentado para a estrutura de três elementos................ 58 Figura 46 - Resposta do controle apresentado para a estrutura de três elementos com saturação do controlador......................................................................................................... 59 Figura 47 - Resposta do controlador PI (ITSAE) a um degrau unitário................................. 60 Figura 48 - Resposta do controlador PID (ITSAE) a um degrau unitário. ............................. 61 Figura 49 - Resposta do controlador PID com filtro (ITSAE) a um degrau unitário. ............ 61 Figura 50 – Simulação proposta pelo autor para o modelo de controle de nível do vaso gerador de vapor. ..................................................................................................................... 63 Figura 51 - Resposta do controlador P (ITSAE) a um degrau unitário. ................................. 64 Figura 52 - Resposta do controlador PI (ITSAE) a um degrau unitário:................................ 64 Figura 53 - Resposta do controlador PID (ITSAE) a um degrau unitário. ............................. 65 Figura 54 - Resposta do controlador PID com filtro (ITSAE) a um degrau unitário. ............ 65 Figura 55- Resposta do controlador C2 PI (ITSAE) a um degrau unitário. ........................... 67 Figura 56 - Resposta dos controladores C1 e C2 PI (ITSAE) a um degrau unitário.............. 67 Figura 57 - Resposta do controlador C2 PID (ITSAE) a um degrau unitário. ....................... 68 Figura 58 - Resposta dos controladores C1 e C2 PID (ITSAE) a um degrau unitário. .......... 68 Figura 59 - Resposta dos controladores C2 PID com filtro (ITSAE) a um degrau unitário... 69 Figura 60 - Resposta dos controladores C1 e C2 PID (ITSAE) a um degrau unitário. .......... 69 Figura 61– Simulação proposta pelo autor para o modelo de controle de nível do vaso gerador de vapor. ..................................................................................................................... 70 Figura 62 - Resultados para o modelo de Mrunalini, Kundu e Dutta, onde: Entrada(1): Vazão de geração de Vapor, Entrada(2): Vazão de água de alimentação, Entrada(3): Vazão de combustível (carga térmica) e Saída(1): Nível, Saída(2): Pressão ......................................... 71 Figura 63 - Resultados para o modelo de Marques, onde: Entrada(1): Pressão do vaso de vapor, Entrada(2): Vazão de geração de vapor e Entrada(3): Vazão de água de alimentação, sendo a única saída analisada: o nível. ................................................................................... 72 Figura 64 - Resposta do controlador PI (ITSAE) a um degrau unitário................................. 74 Figura 65- Resposta do controlador PID (ITSAE) a um degrau unitário. .............................. 74 LISTA DE TABELAS Tabela 3– Benefícios do uso do Controlador MFA ................................................................. 29 Tabela 4 – Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab® ............................................................................................................ 50 Tabela 5 – Parâmetros dos Controladores obtidos por Zigler & Nichols............................... 53 Tabela 6 – Parâmetros ajustados para os controladores ........................................................ 59 Tabela 7 – Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab® ........................................................................................................... 60 Tabela 8 - Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab® para a arquitetura clássica................................................................ 63 Tabela 9 - Parâmetro dos controladores C1 obtidos através da ferramenta de sintonia automática do Matlab® para a arquitetura alternativa .......................................................... 66 Tabela 10 – Parâmetro dos controladores C2 obtidos através da ferramenta de sintonia automática do Matlab® para a arquitetura alternativa .......................................................... 66 Tabela 11 – Parâmetros dos controladores apresentados por Marques (2005). .................... 73 Tabela 12 – Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab®. .......................................................................................................... 73 Tabela 13 – Resumo dos resultados obtidos ............................................................................ 76 SUMÁRIO 1 INTRODUÇÃO ................................................................................................................. 8 1.1 1.1.1 1.2 1.3 1.3.1 1.3.2 1.4 1.5 1.6 1.7 2 CONTROLE DE NÍVEL................................................................................................ 15 2.1 2.1.1 2.1.2 2.2 2.3 2.4 2.4.1 2.4.2 3 5.1 5.2 5.3 5.4 CONTROLE ANTECIPATÓRIO OU FEEDFORWARD .............................................................. 24 CONTROLE COM REALIMENTAÇÃO OU FEEDBACK ........................................................... 25 OUTRAS ESTRUTURAS DE CONTROLES ............................................................................ 26 Modelo Interno de Controle – IMC (Internal Model Control)....................................... 26 Controle Adaptativo Livre de Modelo – MFA (Model-Free Adaptive) ......................... 28 Sistemas lineares, invariantes com o tempo ou linear, time invariant systems (LTI) .... 30 METODOLOGIA ........................................................................................................... 31 4.1 4.1.1 4.2 4.3 4.4 4.5 4.6 4.7 5 A DINÂMICA DO CONTROLE DE NÍVEL DE UM TUBULÃO ................................................... 15 Efeito “encolhe-cresce” (shrink and swell) .................................................................... 15 Resposta Inversa ............................................................................................................. 17 MODELO MATEMÁTICO TÍPICO PARA O SISTEMA ............................................................. 18 DIAGRAMA DE BLOCOS E EQUAÇÃO CARACTERÍSTICA.................................................... 20 DIAGRAMA FUNCIONAL DE CONTROLE ............................................................................ 21 Controle de alimentação de água com dois elementos: .................................................. 21 Controle de alimentação de água com três elementos: ................................................... 22 ESTRATÉGIAS DE CONTROLES.............................................................................. 24 3.1 3.2 3.3 3.3.1 3.3.2 3.3.3 4 TEMA 8 Delimitação do tema ....................................................................................................... 11 PROBLEMA E PREMISSAS......................................................................................... 12 OBJETIVOS ................................................................................................................... 12 Objetivo geral ................................................................................................................. 12 Objetivo específico ......................................................................................................... 12 JUSTIFICATIVA ........................................................................................................... 12 PROCEDIMENTOS METODOLÓGICOS.................................................................... 13 EMBASAMENTO TEÓRICO ....................................................................................... 13 ESTRUTURA DO TRABALHO.................................................................................... 14 O MODELO DE ASTRÖM E BELL (2000) ............................................................................ 31 Controle de um Vaso gerador de Vapor – Matlab® Demo: ............................................ 32 O MODELO DE BEQUETTE (2003) ..................................................................................... 37 O MODELO DE HUANG ET AL. (2008) ............................................................................... 39 O MODELO DE XU, LI E CAI (2004) .................................................................................. 40 O MODELO DE MRUNALINI, KUNDU E DUTTA (2006) ...................................................... 41 O MODELO DE MARQUES (2005)...................................................................................... 43 O MODELO DE NANHUA, WENTONG E MING (2006) ........................................................ 46 RESULTADOS E ANÁLISES ....................................................................................... 48 RESULTADOS DA SIMULAÇÃO DO MODELO BOILER DEMO®............................................. 49 RESULTADOS DA SIMULAÇÃO DO MODELO DE BEQUETTE ............................................... 50 RESULTADOS DA SIMULAÇÃO DO MODELO DE HUANG ET AL.(2008) ............................... 59 RESULTADOS DA SIMULAÇÃO DO MODELO DE XU, LI E CAI (2004)................................. 63 5.5 5.6 5.7 5.8 6 RESULTADOS DA SIMULAÇÃO DO MODELO DE MRUNALINI, KUNDU E DUTTA (2006) ..... 70 RESULTADOS DA SIMULAÇÃO DO MODELO DE MARQUES (2005)..................................... 72 RESULTADOS DA SIMULAÇÃO DO MODELO DE NAHUA, WENTONG E MING (2006).......... 73 RESUMO DOS RESULTADOS .............................................................................................. 75 CONCLUSÕES ............................................................................................................... 78 REFERÊNCIAS ..................................................................................................................... 80 8 1 INTRODUÇÃO 1.1 TEMA Unidades geradoras de vapor, caldeiras, são amplamente empregadas no âmbito mundial, com as mais diversas capacidades e propósitos, desde o mero aquecimento residencial até a geração de energia em termoelétricas. As caldeiras são projetadas para produção de vapor conforme requisitos e necessidades do processo produtivo, juntamente ao emprego na geração de energia elétrica, conforme Perry e Green (1999, tradução da autora). Nas instalações industriais atuais, diversos elementos compõem o sistema de geração de energia: caldeiras, turbinas a vapor, motores de combustão, turbinas a gás, etc. Entre estes elementos destaca-se a caldeira de vapor, a qual normalmente constitui-se como o componente mais importante e mais caro do sistema de geração de energia, no ciclo rankine. (ARNAO, 2007, p. 02) Caldeiras à vapor são equipamentos destinados a produzir e acumular vapor sob pressão superior à atmosférica, utilizando qualquer fonte de energia segundo a NR-13 (Norma Regulamentadora do Ministério do Trabalho, 2008). No mercado industrial, geradores de vapor, ou caldeiras, tem sido projetadas para a queima de uma grande gama de combustíveis, para a operação em pressões acima de 12.4MPa (1800psia) e taxas de geração de vapor excedendo os 455kg/h, segundo Perry e Green (1999, tradução da autora). As caldeiras em geral utilizam-se basicamente da queima de combustíveis fósseis para gerar energia que é irradiada sobre a água que evapora controladamente, gerando o vapor em quantidade, pressão e temperatura desejada. Um modelo típico de caldeira industrial é ilustrado na figura 1. 9 Figura 1- Caldeira Radiante à gás natural ou óleo (Babcock & Wilcox Co) Fonte: Adaptado de Perry (1999, p. 27-41). A caldeira típica apresentada na Figura 1 demonstra as principais sessões de uma caldeira, desde o aquecedor de ar para a queima, a área dos queimadores da câmara de combustão, e as regiões de superaquecimento. No entanto, no âmbito da indústria atual, em que se valoriza mais e mais a recuperação de calor, ou o aproveitamento de energia, existem processos geradores de vapor que se utilizam da propriedade termodinâmica da conservação de energia para gerar vapor, aproveitando-se do calor gerado em outra parte do processo. Nestes casos, os produtos de um processo, com grande carga térmica que seria desperdiçada, trocam calor com a água em um refervedor onde a água evapora e circula naturalmente através de tubulações por diferença de densidade até o vaso de geração de 10 vapor, seguindo o mesmo princípio de geração de vapor de uma caldeira aquotubular, conforme demonstrado no fluxograma da figura 2. Figura 2 - Arranjo típico da Geração de Vapor através da recuperação de calor. Fonte: Autoria própria. A figura 2 apresenta um trocador de recuperação de calor proveniente do processo e que em contato com a água gera vapor acumulando-o no vaso gerador de vapor. Segundo Moradi, Avval e Bakhtiari-Nejad (2009, tradução da autora) o vaso de geração de vapor da caldeira, é um dos componentes mais críticos de uma Unidade de Geração de Energia, isto porque, a temperatura e a pressão afetam o desempenho destas unidades. Desta forma, o controle do nível de água do vaso e o acompanhamento dos comandos de variação da pressão e da energia gerada, são esperados nestes sistemas. De acordo com Bracco, Troilo e Trucco (2009, tradução da autora) o controle da operação de geradores de vapor é muito crítico, principalmente por motivos de segurança. Por isso os sistemas de geração de vapor são equipados com um grande número de dispositivos de segurança, tal como o controle de nível de água que previnem situações perigosas que podem ocorrer no caso de excesso de líquido, ou esvaziamento. 11 O primeiro controle automático conhecido foi o governador Fly-ball instalado na máquina a vapor de Watt1 em 1775 para regular a vazão de vapor. Quase um século mais tarde o primeiro modelo matemático do governador Fly-ball foi preparado por James Clerk Maxwell2 Isto ilustra uma prática comum no desenvolvimento do controle de processos, utilizando-se um sistema antes mesmo do completo entendimento do porque e de como ele realiza o trabalho. A expansão do uso de caldeiras a vapor resultou na introdução de outros sistemas de controle automático, como por exemplo, os reguladores de pressão do vapor e a primeira caldeira com elementos múltiplos, conforme Altmann (2005, tradução da autora). Por sua vez, a aplicação dos primeiros controles digitais em caldeiras, utilizados na divisão de químicos e na divisão de plásticos da União Carbide3, deram-se apenas em 1980, de acordo com Hughart (1982, tradução da autora). Atualmente, a utilização de caldeiras é tão difundida, e seus problemas tão conhecidos que institutos regulamentadores, como é o caso do Instrument Society of America (ISA), juntamente com a American National Standards Institute (ANSI), criaram a norma ANSI/ISA-S77.42.01-1999 com o propósito de uniformização da instrumentação em Sistemas de Controle de Alimentação de Vasos de Plantas de produção de Energia a partir de combustível fóssil. Além disso, devido ao histórico de instabilidades nestes sistemas, e visando a segurança do trabalhador, o próprio Ministério do Trabalho e Emprego brasileiro (MTE), gerou a Norma Regulamentadora NR-13, com sua primeira publicação em junho de 1978, específica para Caldeiras e Vasos de Pressão. 1.1.1 Delimitação do tema O presente estudo pretende analisar, dentro deste escopo, as melhores práticas utilizadas na modelagem e simulação de processos de geração de vapor, adaptando ao processo em questão. Almeja-se, identificar desta forma, a melhor forma de controle a ser empregada de modo a evitar as oscilações e minimizar os distúrbios presentes neste processo. 1 James Watt (Escócia, 1736 – Inglaterra, 1819) foi um matemático e engenheiro escocês, construtor de instrumentos científicos, destacou-se pelos melhoramentos que introduziu no motor a vapor, que se constituíram num passo fundamental para a Revolução Industrial. 2 James Clerk Maxwell (Edimburgo, 1831 – Cambridge, 1879) foi um físico e matemático britânico, mais conhecido por ter dado sua forma final à teoria moderna do eletromagnetismo, que une a eletricidade, o magnetismo e a óptica. 3 Union Carbide é uma grande empresa do ramo químico e de polímeros, com mais de 3.800 funcionários (http://www.unioncarbide.com/about/index.htm) 12 1.2 PROBLEMA E PREMISSAS Como muitas paradas de emergência de unidades geradoras de energia são causadas pelo uso de um controle não adequado, o controle de estabilidade do nível é crítico para a operação econômica de qualquer unidade geradora de vapor dentro de Plantas de Energia, conforme Nanhua, Wentong e Ming (2006, tradução da autora). Este problema se torna ainda mais crítico em caso de unidades que geram vapor a partir da recuperação de calor dentro do processo, e utilizam o vapor gerado imediatamente no processo. Um exemplo deste caso se dá em Unidades Geradoras de Hidrogênio, onde um descontrole de nível do tubulão de geração de vapor acarreta a sérios danos materiais à unidade. Deve-se considerar, portanto, as diferentes condições operacionais deste sistema, tais como as variações de pressão, temperatura e densidade, identificando suas implicações na performance de controle e buscando uma condição ótima de operação deste sistema pela análise macro e micro dos componentes envolvidos neste sistema. 1.3 OBJETIVOS 1.3.1 Objetivo geral Estudar práticas utilizadas na modelagem e simulação de processos de geração de vapor, especificamente ao processo de controle do nível no vaso gerador de vapor. 1.3.2 Objetivo específico • Simular o comportamento de modelos de sistemas de geração de vapor, • Estudar diferentes controles de nível para o vaso do sistema de geração de vapor, • Comparar os resultados obtidos. 1.4 JUSTIFICATIVA Autores como Aström, Huang, dentre outros, já estudaram o comportamento de sistemas de geração de vapor, uma vez que os mesmos são amplamente utilizados. Além 13 disso, diversas estratégias de controle já foram propostas para este mesmo sistema. Mesmo assim, análises específicas da dinâmica em sistemas geradores de vapor dentro das unidades de processo que geram vapor como subproduto, recuperando a energia do processo, não são amplamente difundidas. Dessa forma, com o objetivo de estudar um controle que minimize os distúrbios para este tipo de sistema, optou-se pelo desenvolvimento deste estudo. Apesar do controle de nível em caldeiras ser um assunto de vasto desenvolvimento no âmbito mundial, baseado em pesquisa dos bancos de teses brasileiras, tais como sítios das universidades brasileiras: Universidade Federal de Santa Catarina (UFSC), Universidade Federal do Rio Grande do Sul (UFRGS), Universidade de São Paulo (USP), Universidade Estadual de Campinas (UNICAMP) e Universidade Federal da Bahia (UFBA), ainda existem poucos estudos destinados a este fim no Brasil. Assim se torna interessante o desenvolvimento de estudos neste âmbito reunindo os melhores desenvolvimentos na área. 1.5 PROCEDIMENTOS METODOLÓGICOS Este será um estudo baseado em pesquisa aplicada, de campo e explicativo, segundo Frascati (2002, tradução da autora). Para se atingir os objetivos propostos no item 1.3.1, será necessário utilizar uma ferramenta computacional em que se desenvolva a modelagem e simulação do processo em questão, baseados na literatura. Será utilizado o software MATLAB/SIMULINK® 6.5 para cumprir este procedimento e gerar o material necessário à análise do sistema. O registro formal dos resultados terá como objetivo difundir o estudo realizado proporcionando aos envolvidos na operação de processos semelhantes à uma melhor percepção da dinâmica do controle formação de uma massa crítica sob o comportamento do sistema, evidenciando assim o caráter explicativo da pesquisa. 1.6 EMBASAMENTO TEÓRICO Neste estudo, a principal linha teórica será o modelo proposto por Bequette (2003) que apresenta os parâmetros de simulação de um sistema de geração de vapor. Além deste autor, demais autores tais como Nanhua, Wentong e Ming (2006), Aström e Bell (2000), Bracco, Troilo e Trucco (2009), Xu, Li e Cai (2004), Kim e Choi (2005), Huang et al. (2008) e 14 Marques (2005), desenvolveram estudos de sistema de geração de vapor apresentando outras linhas de modelagem do mesmo sistema, todos estes trabalhos serão discutidos. 1.7 ESTRUTURA DO TRABALHO Este trabalho compõe-se de 5 (cinco) partes, com 6 (seis) capítulos, sendo; • Parte 1 – Capítulo introdutório. • Parte 2 – Fundamentos teóricos: Capítulos 2 e 3. • Parte 3 – Procedimentos metodológicos: Capítulo 4. • Parte 4 – Dados obtidos, análises e conclusões: Capítulos 5 e 6. • Parte 5 – Referências. O Capítulo 1, introdutório deste trabalho, estabelece seu tema central, esclarecendo os objetivos propostos ao presente estudo e as motivações do presente estudo. O Capítulo 2 inicia os fundamentos teóricos com os conceitos gerais sobre o controle de nível de um vaso gerador de vapor. O Capítulo 3 aborda os fundamentos teóricos dos tipos controladores e a metodologia para a sua sintonia. Os procedimentos metodológicos adotados na condução deste estudo estão descritos no Capítulo 4. O Capítulo 5 apresenta dados obtidos através das simulações dos modelos apresentados no Capítulo 4, bem como apresenta as análises dos resultados obtidos com as simulações. As conclusões do trabalho são apresentadas no Capítulo 6, seguido das referências bibliográficas utilizadas para a fundamentação teórica do mesmo. 15 2 CONTROLE DE NÍVEL Um dos controles mais importantes nas unidades industriais é o dos níveis. Estes controles são responsáveis pelos “balanços de massa” das Plantas. Isto é, para manter um nível de um tanque ou vaso constante é necessário que a vazão mássica de entrada seja igual à de saída. Desta forma, quando ocorre um aumento na vazão de entrada, o controle de nível deve aumentar a vazão de saída para manter a estabilidade do sistema. Entretanto, este aumento não precisa ser no mesmo instante. Ao contrário, deve-se procurar sintonizar a malha de nível de forma a usar o volume do tanque para amortecer as variações da vazão de saída. (CAMPOS, TEIXEIRA, 2006, p. 116) O principal objetivo de um bom controle de nível é o de absorver as variações do sistema, sem que os distúrbios sejam propagados ao restante do processo. Para melhor entendimento dos parâmetros envolvidos e das particularidades do controle de nível de um vaso gerador de vapor, alguns conceitos serão detalhados. 2.1 A dinâmica do controle de nível de um tubulão A grande dificuldade de estabilidade do controle de nível em um vaso de geração de vapor, devido à dinâmica do processo, talvez seja a principal dificuldade a ser contornada. Segundo Aström e Bell (2000, tradução da autora), uma das principais razões das paradas de emergência das unidades de geração de vapor, é causada pela deficiência de controle do nível do vaso. Uma das razões da dificuldade deste controle é a complicada dinâmica do efeito “encolhe-cresce” (shrink and swell). Este efeito frequentemente leva o sistema a apresentar uma resposta inversa à variação a ele submetida, sendo este o principal efeito a ser contornado no controle de nível do tubulão. 2.1.1 Efeito “encolhe-cresce” (shrink and swell) Este efeito é esclarecido por Shinskey (1988, tradução da autora) conforme descrito a seguir: Se a geração de vapor aumentar (saída de vapor) é suficiente para causar a queda da pressão do vaso, parte da água dos tubos irá vaporizar, temporariamente aumentando a vazão de líquido e vapor para dentro do vaso. Este efeito é chamado de encolhimento (swell), pois ele causa um aumento no nível do líquido transiente, mesmo que momentaneamente a taxa de saída de vapor possa superar a alimentação de água. De modo oposto, sob um aumento de pressão, o nível de líquido tende a encolher (shrink). Este efeito é mais proeminente no caso 16 de tubulões de baixa pressão, devido à grande diferença entre as densidades do vapor e da água. A alimentação de água a uma temperatura abaixo da temperatura de ebulição dentro do vaso causa alguma condensação interna. Um aumento repentino na vazão pode então momentaneamente reduzir a taxa de vaporização. O nível do líquido no vaso é suportado pelo aumento de bolhas da evaporação. Quando estas bolhas colapsam, em resultado da diminuição da taxa de evaporação, o nível de líquido cai. Consequentemente, um aumento na vazão de alimentação pode efetivamente causar a diminuição do nível de líquido momentaneamente antes do inventário de líquido começar a aumentar. A melhor forma de lidar com o efeito encolhe-cresce é ignorar ele, deixando uma malha antecipatória (forward) continuar a aumentar a carga, deixando solto o controlador de nível. Controladores de nível de vasos geralmente requerem uma banda proporcional próxima a 100% e diversos minutos de tempo integral, operando dessa forma. Contudo, a compensação dinâmica para o efeito encolhe-cresce já foi demonstrada com sucesso em medições de nível do vaso. Ela consiste em subtrair o derivativo da vazão de vapor da medição de nível do vaso, vide figura 3. A pressão do vaso também pode ser usada ao invés da vazão de vapor, com o sinal reverso. No estado estacionário, o controlador do nível enxerga a saída do transmissor de nível sozinho. À medida que a vazão de vapor aumenta (ou queda de pressão do vaso), o sinal para o controlador de nível é diminuído por um sinal do compensador proporcional, proporcional ao aumento da indicação de nível (swell). De modo similar, o encolhimento é compensado na queda da vazão de vapor (ou aumento de pressão do vaso). O atraso (lag) da figura 3 é tipicamente estipulado (setado) em torno de 15 segundos, e o ganho do avanço (KD) assume o valor necessário para o melhor resultado. 17 Figura 3 - Compensador do fenômeno shrink and swell, em função da taxa de variação da vazão de vapor ou da pressão do vaso. Fonte: Adaptado de Shinskey (1988, p. 357) 2.1.2 Resposta Inversa Ainda segundo Shinskey (1988, tradução da autora), dinamicamente, a resposta inversa é caracterizada por um atraso (lag) acompanhado por um avanço (lead) negativo. O avanço negativo produz a característica familiar de um avanço positivo, mas desenvolve um atraso de fase. A magnitude relativa da constante de tempo pode ser inferida de uma resposta a um degrau pelo tempo requerido pela variável do controlador para atravessar a posição original. Este tempo é designado de tempo de inversão (ti), como representado na figura 4. Figura 4 - Resposta inversa característica do nível de líquido em um vaso gerador de vapor. Fonte: Adaptado de Shinskey (1988, p. 355) 18 2.2 Modelo Matemático Típico para o sistema O volume de controle a ser analisado para o qual o modelo matemático será apresentado, é demonstrado no desenho esquemático da figura 5. Nesta figura, observa-se a massa de água entrando no vaso e a massa de vapor gerada saindo proporcionalmente ao calor que é irradiado ao sistema. A vaporização da água ilustrada pela formação de bolhas. Figura 5 - Desenho esquemático do volume de controle do vaso gerador de vapor. Fonte: Autoria própria Um modelo matemático simplificado é apresentado por Bracco, Troilo e Trucco (2009): 2.2.1 Balanço de Massa A equação (1) de conservação de massa aplicada ao vaso de geração de vapor é escrita: • • m a − mv = dm dt • (1) • onde m a é a vazão mássica de líquido, da descarga da bomba de água, mv é a vazão mássica do vapor saturado, enquanto que a vazão total contida no vaso é dada pela equação (2). m = ma + mv = ρ a ( p ) ⋅ Va ( z ) + ρ v ( p ) ⋅ [V − Va ( z )] (2) 19 onde ma é a massa de líquido dentro do vaso, até o nível “z”, e mv é a massa de vapor saturado que fica sobre o nível de líquido. Nesta equação, ρ a é a densidade do líquido nas condições de saturação, ρ v é a densidade do vapor saturado, p é a pressão dentro do vaso, V é o volume total interno do vaso e Va é o volume ocupado pelo líquido dentro do vaso. Substituindo a equação (2) dentro da (1), temos a equação (3): • d ρ a ( p) dp dV ( z ) dz d ρv ( p) dp dV ( z ) dz • ⋅ ⋅ Va ( z ) + ρ a ( p) ⋅ a ⋅ + ⋅ ⋅ [V − Va ( z )] − ρ v ( p) ⋅ a ⋅ = m a − mv (3) dp dt dz dt dp dt dz dt Rearranjando a equação (3) tem-se a equação (4): • d ρ a ( p) dp d ρv ( p ) dVa ( z ) dVa ( z ) dz • ⋅ V ( z ) + ⋅ [ V − V ( z )] ⋅ + ( p ) ⋅ − ( p ) ⋅ ⋅ = m − m ρ ρ a v (4) a a v dp dt a dp dz dz dt 2.2.2 Balanço de Energia A equação usada para modelar o balanço de energia dentro do vaso, é baseada nas seguintes considerações: (a) as variações das energias potencial e cinética das duas fases do fluído são desconsideradas; (b) a perda de carga dentro do sistema não é levada em consideração; (c) o vaso é considerado isolado do ambiente externo, portanto o fluxo térmico é inteiramente usado para a produção de vapor saturado; (d) a vazão de água entra no vaso à uma temperatura constante Tent. O fluxo térmico que é transferido para a água no interior do vaso φT, é responsável tanto pelo aumento da temperatura do fluído até o seu ponto de saturação na pressão do vaso quanto pelo processo de vaporização para a obtenção do vapor saturado na saída do vaso. Assumindo as considerações apontadas, a equação do balanço de energia aplicada a este sistema é vista na equação (5): • • m a ⋅ hta ( p, Tent ) − mv ⋅ htv ( p ) + φT = dU dt (5) onde U denota a energia interna total do fluído (líquido e vapor) dentro do vaso, hta é a entalpia específica total da água que entra no vaso, e htv é a entalpia específica total do vapor saturado que sai do vaso. 20 A energia interna total U é dada pelas equações (6) e (7): U = ma ⋅ ua ( p ) + mv ⋅ uv ( p ) (6) U = ρ a ( p ) ⋅ Va ( z ) ⋅ ua ( p ) + ρ v ( p ) ⋅ [V − Va ( z )] ⋅ uv ( p ) (7) onde ua é a energia interna específica da fase líquida, enquanto uv indica a energia interna específica do vapor saturado. Substituindo a equação (7) dentro da equação (6), obtém-se a equação (8): dua ( p ) d ρa ( p) dp ⋅ Va ( z ) ⋅ ua ( p ) + dp ⋅ ρ a ( p ) ⋅ Va ( z ) + dz • • ⋅ = m a ⋅ hta ( p, Tent ) − m v ⋅ htv ( p ) + φT (8) d ρ v ( p ) ⋅ [V − V ( z )] ⋅ u ( p ) + duv ( p ) ⋅ ρ ( p ) ⋅ [V − V ( z )] dt a v v a dp dp Neste caso, a energia cinética é muito pobre quando comparada com a energia térmica e a entalpia, sendo seu termo sempre desconsiderado. 2.3 Diagrama de Blocos e Equação Característica O diagrama de Blocos para o processo de controle de um vaso gerador de vapor pode ser representado conforme representado na Figura 6, cujos blocos representam respectivamente as equações do controlador, da válvula de admissão de água, da dinâmica do processo, e do distúrbio ocasionado pelas variações de consumo de vapor (aumento ou diminuição da pressão do vaso): Figura 6 - Diagrama de Blocos do Processo. Fonte: Autoria própria E a função de transferência que corresponde à equação característica deste sistema em malha fechada, ignorando-se o distúrbio do processo, pode ser representada pela Equação 9. 21 g (s) = g p ( s )⋅ g v ( s ) ⋅ gc ( s ) 1 + g p (s) ⋅ gv (s) ⋅ gc (s) (9) O objetivo do sistema de controle é obter a saída y(s) em função da entrada r(s), ou do seu set-point. Para garantir que este sistema seja estável todos os pólos de g(s) deverão ser estáveis. 2.4 Diagrama Funcional de Controle Segundo a norma regulamentadora ANSI/ISA-S77.42.01-1999 (tradução da autora), os usuais controles de nível dos vasos geradores de vapor industriais devem ser compostos pelos seguintes arranjos: 2.4.1 Controle de alimentação de água com dois elementos: Consiste em um sistema de controle composto por duas variáveis de processo (vazão de vapor e nível do vaso) que são usadas como entradas (inputs) para uma malha fechada que regula a vazão de alimentação de água para o vaso, de modo a manter o nível do vaso no ponto de ajuste (setpoint). A entrada do controle antecipatório é a vazão de vapor, com a saída do controlador de nível do vaso como o sinal de controle primário. 22 Figura 7 - Controle de alimentação de água com dois elementos. Fonte: Adaptado de ANSI/ISA-S77.42.01-1999 2.4.2 Controle de alimentação de água com três elementos: Conforme a norma regulamentadora ANSI/ISA-S77.42.01-1999 o sistema de controle com três elementos, apresentado na figura 8, consiste em um sistema de controle composto por três variáveis de processo (vazão de vapor, vazão de água de alimentação e nível do vaso) que são usadas como entradas (inputs) para uma malha fechada que regula a vazão de alimentação de água para o vaso, de modo a manter o nível do vaso no ponto de ajuste (setpoint). Esta é uma malha cascata antecipatória com o nível do vaso como a primeira variável, a vazão de vapor como a entrada do antecipatório, e a vazão de água de alimentação (realimentação) como a segunda variável. De acordo com Bequette (2003), a estratégia de controle conhecida como modelo de três elementos é utilizada na prática. O propósito do controlador de vazão é rejeitar os 23 distúrbios de vazão de água de alimentação do vaso (devido à variação de pressão a jusante da válvula, ou a resistência ao início do movimento, por exemplo), enquanto o controlador antecipatório rejeita os distúrbios da demanda de vapor. O controlador de nível provém ainda uma ação corretiva de longo tempo. Figura 8 - Controle de alimentação de água com três elementos. Fonte: Adaptado de ANSI/ISA-S77.42.01-1999 24 3 ESTRATÉGIAS DE CONTROLES Neste capítulo serão abordadas as estratégias de controle usuais e as mais avançadas empregadas no controle foco deste estudo. 3.1 Controle Antecipatório ou Feedforward Quando a razão entre o tempo morto e a constante de tempo do processo for grande, o controle com realimentação não é capaz de evitar grandes desvios do “setpoint” em função das perturbações. Logo com o objetivo de minimizar estes desvios, pode ser interessante medir as principais perturbações e implementar um controle antecipatório ou “feedforward”(...) A vantagem do controle antecipatório é que ele permite compensar os efeitos das perturbações antes de elas perturbarem efetivamente e de forma considerável o processo. (CAMPOS, TEIXEIRA, 2006, p. 209) Um típico controle feedforward, ou antecipatório, é representado pelo diagrama de blocos da figura 9. Figura 9 - Exemplo de Controle Feedforward. Fonte: Autoria própria. O controle antecipatório pode ser configurado com base nas equações 10, 11, 12 e 13. O diagrama de blocos apresentado na figura 10 exemplifica as equações. 25 Figura 10 - Diagrama de blocos do controle antecipatório. Fonte: Adaptado de CAMPOS, TEIXEIRA (2006, p. 210). A função de transferência do controle antecipatório (GFF), a ser configurada no sistema digital de automação industrial, pode ser obtida a partir dos modelos dinâmicos identificados para o processo (G1 e G2), de forma a eliminar o efeito da perturbação na variável controlada (CAMPOS, TEIXEIRA, 2006, p. 210), segundo as equações 10 e 11. Y ( s ) = F1 ⋅ G2 ( s ) + ( F1 ⋅ GFF ( s ) + U 1) ⋅ G1 ( s ) (10) Y ( s ) = F1 ⋅ [G2 ( s ) + GFF ( s ) ⋅ G1 ( s )] + U 1 ⋅ G1 ( s ) (11) Para que a variável controlada (Y) só dependa da manipulada (U1), o primeiro termo associado com a perturbação (F1) deve ser igual a zero (CAMPOS, TEIXEIRA, 2006, p. 210), vide equação 12. G2 ( s ) + GFF ( s ) ⋅ G1 ( s ) = 0 (12) Assim define-se a função de transferência para o bloco de cálculo antecipatório como o inverso do modelo dinâmico do processo, que neste caso demonstra-se pela equação 13. GFF ( s ) = − 3.2 G2 ( s ) G1 ( s ) (13) Controle com Realimentação ou Feedback O termo realimentação (feedback) é usado para se referir a uma situação em que dois (ou mais) sistemas dinâmicos estão conectados um ao outro de forma que cada sistema influencie o outro e a sua dinâmica esteja fortemente acoplada, conforme Aström (2004, tradução da autora). 26 Um diagrama básico com realimentação é mostrado na Figura 11: Figura 11 - Exemplo de Controle Feedback. Fonte: Autoria própria. A malha deste sistema é composta por dois componentes, o processo P e o controlador C, e sua realimentação, em malha fechada. O objetivo do controlador é reduzir o erro através de um controle realimentado pela saída do processo. Segundo Seborg, Edgar e Mellichamp (1989, da autora) o controlador é a parte mais importante em um sistema com realimentação. E os três modos básicos de controle com realimentação que são amplamente empregados são o proporcional (P), o integral (I) e o controle derivativo (D). 3.3 Outras Estruturas de Controles Existem outros controladores já explorados para a aplicação em questão. Dois deles serão aqui apresentados de modo a subsidiar ao público deste estudo explorar outras técnicas de controle. 3.3.1 Modelo Interno de Controle – IMC (Internal Model Control) Segundo Bequette (2003), este modelo de controle foi desenvolvido para lidar com as incertezas dos processos e seus distúrbios. Trata-se de um modelo desenvolvido a partir da determinação do modelo do erro de um determinado processo, derivado de uma estrutura de malha aberta. Esta informação, por sua vez é utilizada pelo controlador de modo a compensar a incerteza do modelo. O mesmo é feito para o distúrbio. Existe um número de vantagens para a estrutura IMC (e procedimentos de projeto de controladores), quando comparados com os modelos clássicos da estrutura feedback. Uma delas é que se torna muito claro como as características de processo tais como delay de tempo 27 e efeitos de um zero da função de transferência no semi-plano direito (RHP), afetam a controlabilidade intrínseca do processo. Os IMC’s são muito mais fáceis de sintonizar do que os controladores nas estruturas normais do controle feedback. Ainda conforme Bequette (2003), a maior vantagem do controlador IMC é que ele disponibiliza uma estrutura limpa e clara para o projeto e a sintonia de um sistema de controle. Para muitos processos a estrutura resulta em um simples PID o que a torna agradável para o seu uso em equipamentos padrões, ao mesmo tempo em que viabiliza a implementação de seus algoritmos em um conceito “avançado” de controle. Outra qualidade do controlador IMC é que sua interface resulta em um único parâmetro de sintonia, o filtro IMC (λ). Como exemplificado por Bequette (2003), para o caso específico do controle de nível de um tubulão, pode-se adotar um controlador IMC baseado em um PID. Sabe-se que um controlador apenas feedback possui offset quando um distúrbio de alimentação ocorre. Isto ocorre porque o controlador não possui ação integral. Um controlador IMC baseado em um PID, com ação integral, pode ser desenvolvido para a integração deste processo com resposta inversa, conforme a equação 14. ~ ~ g p ( s) = k p ⋅ (− β .s + 1) s ⋅ (τ p ⋅ s + 1) (14) Adotando-se o filtro IMC demonstrado na equação 15: f ( s) = γ ⋅ s +1 (λ ⋅ s + 1) 2 (15) Sendo γ = 2.λ + β, obtém-se a ação integral. Assim os parâmetros para um controlador PID ideal são apresentados nas equações 16, 17 e 18. kc = 2 ⋅ λ + β +τ p k p ⋅ (λ + β ) 2 (16) τ I = 2 ⋅ λ + β +τ p (17) τD = τ p ⋅ (2 ⋅ λ + β ) 2 ⋅ λ + β +τ p (18) 28 3.3.2 Controle Adaptativo Livre de Modelo – MFA (Model-Free Adaptive) Outro controle disponível no mercado para esta aplicação é o controle livre de modelo (Model-Free Adaptive), que conforme ele mesmo sugere é um método de controle adaptativo que não requer modelos de processo, baseado no sítio do próprio fabricante Cybosoft. Esta tecnologia patenteada foi desenvolvida pela própria CyboSoft General Cybernation Group Inc., e na sequência será descrito o comportamento deste controlador conforme informações disponíveis no sitio do fabricante. Este sistema de controle é definido para ter as seguintes propriedades: (a) conhecimento quantitativo preciso do sistema não é necessário, (b) a identificação ou o identificador do mecanismo do processo não é incluso no sistema, (c) o projeto de um controlador para um processo específico não é necessário, (d) a sintonia manual dos parâmetros do controlador não é necessária, e (e) a análise e o critério de estabilidade para o sistema em malha fechada é disponível para garantir a estabilidade do sistema. Este controlador, quando aplicado ao controle de nível de um vaso gerador de vapor, baseia-se nas variáveis principais que afetam o nível do tubulão: a vazão de água de alimentação, a demanda de vapor e as vazões de combustível. Cada variável impõe um tipo diferente de perturbação. O resfriamento da água leva a um tempo morto puro. O aumento brusco da vazão de vapor provoca resposta com o efeito encolhe-cresce. O controlador será “enganado” por que este efeito vai temporariamente mudar a direção da resposta do processo. O controlador MFA a três elementos, controla o nível do tubulão de maneira eficaz. O controle de nível MFA pode controlar efetivamente o nível do tubulão. Este controlador é cascateado com o controlador de carga para regular o nível do vaso e compensar as perturbações das vazões de carga e de vapor. O controlador MFA anti-delay manipula grandes variações de atraso de processo. O MFA feedforward, mantém a alimentação de água em equilíbrio com a demanda de vapor. A estrutura de uma estratégia típica de controle adotando-se dos controladores MFA, aplicada especificamente ao controle de nível de um tubulão é apresentada na figura 12. Usar um sistema de controle MFA no nível do vaso gerador de vapor confere vantagens múltiplas: • O nível do vaso pode permanecer em controle automático em uma larga faixa operacional com grandes perturbações e mudanças de carga de vapor. 29 • O compensador “Feed-forward” de 3 elementos é simples de implementar usando um controlador MFA, • Não é necessário nenhum modelo de processo ou identificação, o que facilita o comissionamento e a manutenção. Os benefícios da utilização do controlador MFA para esta aplicação são apresentados na tabela 3. Figura 12 - Diagrama de blocos do controle de nível de um vaso gerador de vapor utilizando o controlador MFA Fonte: Adaptado de http://www.cybosoft.com/ats/ats_3.htm, Cybosoft, 2010. Tabela 1– Benefícios do uso do Controlador MFA Uso do Controlador MFA Benefícios MFA com compensação de tempo morto O nível do tubulão é controlado entre limites alto e antecipatório trata de forma efetiva o e baixo durante grandes variações da pressão do problema “encolhe-cersce” vapor e outras perturbações da planta Evita que o nível atinja valores extremos Melhora de segurança e produtividade do sistema de vapor Evita quedas do sistema de vapor Aumento de eficiência e rendimento da produção Ajuda no controle da temperatura do Economia de energia vapor Aumenta a eficiência e produtividade Retorno do investimento em poucos meses Fonte: http://www.cybosoft.com/ats/ats_3.htm 30 3.3.3 Sistemas lineares, invariantes com o tempo ou linear, time invariant systems (LTI) Conforme descrito por Feldman (2007) os modelos LTI, ou sistemas contínuos, lineares e invariantes com o tempo referem-se a circuitos ou processos que levam um sinal de entrada e produzem um sinal de saída com as seguintes propriedades: (a) Ambas, a entrada e a saída são sinais contínuos no tempo; (b) O sistema é linear, significando que os sinais de entrada x1(t) e x2(t) geram sinais de saída y1(t) e y2(t) respectivamente, e se a1 e a2 são constantes, então o sinal de entrada a1 ⋅ x1 (t ) + a2 ⋅ x2 (t ) geram o sinal de saída a1 ⋅ y1 (t ) + a2 ⋅ y2 (t ) ; (c) O sistema é invariante no tempo, significando que o sinal de entrada x(t) gera um sinal de saída y(t), e então, para cada número real s, o sinal de entrada de tempo invertido x(t ) = x(t − s ) gera um sinal de saída de tempo invertido y (t ) = y (t − s ) . O Sistema de Controle do Matlab® (Control System ToolboxTM) possibilita manipular e analisar os modelos LTI. As funções podem ser contínuas ou discretas e os sistemas podem ser SISO ou MIMO. Os formatos especificados para os modelos LTI são funções de transferência (TF), modelos Zero-polo-ganho (ZPK), modelos de estados de espaço (SS) e também a modelos de resposta em frequência (FRD). 31 4 METODOLOGIA Neste capítulo serão apresentados os modelos que subsidiaram este estudo e será descrita a metodologia adotada no desenvolvimento de análise de alguns destes modelos, exemplificando o comportamento do processo em questão. Segundo Bequette (2003, tradução da autora), o desenvolvimento de uma estratégia de controle consiste na formulação ou identificação dos seguintes itens: 1. Objeto do controle; 2. Variáveis de entrada – classificadas em (a) manipuladas ou (b) variáveis de distúrbio, podendo variar continuamente ou em intervalos de tempo discretos; 3. Variáveis de saída – classificadas em (a) medidas ou (b) variáveis não medidas, medições pode ser feitas continuamente ou em intervalos de tempo discretos; 4. Restrições – classificadas em (a) pesadas e (b) leves, como exemplo de pesada seria a vazão mínima ou máxima conforme faixa de operação de uma válvula, e leve seria a composição do produto; 5. Característica da operação – classificada em (a) contínua, (b) em batelada, ou (c) semi contínua (ou semi batelada); 6. Considerações de segurança, considerações de meio ambiente, e considerações econômicas; 7. Estrutura do controle – os controladores podem ser feedback ou feed forward por natureza. Partindo-se desta metodologia, para o estudo do processo em questão foram adotados os modelos apresentados por Aström e Bell (2000), Bequette (2003), Huang et al (2008), Xu, Li e Cai (2204), Mrunalini, Kundu e Dutta (2006), Marques (2005) e Nanhua, Wentong e Ming (2006). Apesar de diversos autores apresentarem modelos para o mesmo processo, optou-se pela utilização de modelos no domínio “s”, modelados em Simulink, facilitando assim a análise, a comparação e a compreensão das simulações e dos resultados. 4.1 O modelo de Aström e Bell (2000) Talvez um dos modelos mais claros e completos em termos de análise de um sistema gerador de vapor foi apresentado por Aström e Bell em (2000), no estudo da dinâmica do gerador de vapor. O estudo de Aström e Bell a respeito iniciou-se anteriormente à 32 apresentação deste último trabalho, conforme é visto na apresentação da proposta de seu primeiro modelo não-linear para um sistema gerador de vapor em 1993. Estes modelos de Aström e Bell foram de grande interesse de estudo do meio acadêmico subsidiando diversos estudos subseqüentes tais como o de Mrunalini, Kundu e Dutta (2006), Marques (2005), Gaikwad et. al. (2009), Kim e Choi (2005), Xu, Li e Cai (2004), Huang et. al. (2008), e subsidiou até mesmo a elaboração de uma simulação demonstrativa (Demo) no Matlab®. ® 4.1.1 Controle de um Vaso gerador de Vapor – Matlab Demo: A seguir é descrita a simulação demonstrativa criada no Matlab®, com base no tutorial apresentado pela Mathworks®, que possibilita a simulação do sistema de controle de um vaso gerado de vapor. Este demonstrativo, no entanto, visa simular o comportamento do sistema diante das variações da pressão do vapor, regulando a pressão no vaso gerador de vapor. Para isso, o modelo reproduzido baseia-se nas tabelas de vapor. Figura 13 - Modelo e simulação de um sistema gerador de vapor apresentado pelo Matlab®. Fonte: Mathworks®, 2010. 33 Como é observado nas tendências da figura 13, o modelo é bastante representativo quando se reproduz o comportamento da pressão do vaso, a vazão de vapor e a de água sem algum controle sobre o sistema. Figura 14 - Bloco Boiler: Modelo baseado nas tabelas de vapor. Fonte: Mathworks®, 2010. Olhando-se dentro da máscara do bloco Boiler (tubulão), principal da simulação, observa-se o modelo adotado para reproduzir o comportamento da variação de pressão baseado nas tabelas de vapor, como é visto na figura 14. Para rodar a simulação do demonstrativo do Matlab®, adota-se a sequência de comandos apresentada na figura 15. Inicialmente geram-se os dados do ponto de operação especificado, onde os valores de estado são conhecidos. A figura 16 apresenta o ponto de operação obtido. 34 Figura 15 – Linhas de comando de geração dos dados do ponto de operação. Fonte: Mathworks® Figura 16 – Resultado da geração dos dados do ponto de operação. Fonte: Mathworks® Em seguida especificam-se os sinais de entrada e saída para o modelo linear, e na sequência o modelo é linearizado em torno do ponto de operação, conforme demonstrado na figura 17. 35 Definem-se ainda um regulador LQR e um filtro Kalman. Inicialmente encontram-se os offsets do controlador de forma ao controlador operar em torno do ponto de linearização escolhido. E então é definido o regulador. Todas estas linhas de comandos são apresentadas também na figura 17. Os resultados da simulação e teste do processo, para controle das entradas e saídas do referido processo são demonstrados nas figuras 18 e no próximo capítulo. Figura 17 – Linhas de comando do projeto do controlador. Fonte: Mathworks® 36 Figura 18 – Resultado da simulação do controle de pressão do vaso gerador de vapor. Fonte: Mathworks®, 2010. Com o objetivo de avaliar a variação do nível do vaso gerador de vapor, que é o foco do estudo do presente trabalho, foi incluído um bloco de visualização dentro da simulação proposta pelo Matlab®, conforme é visto na figura 19. O comportamento obtido é apresentado no próximo capítulo. 37 Figura 19 – Estrutura incluída na simulação proposta. Fonte: Adaptado de Mathworks®, 2010. 4.2 O modelo de Bequette (2003) O modelo proposto para o estudo do nível de um vaso de geração de vapor baseia-se na função de transferência apresentado na equação 19: g p (s) = 0, 25 ⋅ (− s + 1) s ⋅ (2 ⋅ s + 1) (19) E a função de transferência da válvula é apresentada na equação 20: gv (s ) = 1 0,15 ⋅ s + 1 (20) O comportamento do processo em questão pode ser avaliado através da resposta a um degrau unitário, onde é possível verificar o comportamento descrito de “encolhe cresce”, conforme apresentado na figura 20. 38 Figura 20 - Resposta do processo a um degrau unitário. Fonte: Autoria própria Na prática, existem controles de nível, como os dos tubulões de algumas caldeiras, e o de alguns vasos separadores, com dinâmicas ou tempo de residência de várias dezenas de minutos ou até horas, o que dificulta a sintonia e a análise do desempenho destes controladores. Nestes casos, uma boa solução seria o uso de um simulador (...) para se efetuar uma pré-sintonia, antes do ajuste final no campo. (CAMPOS, TEIXEIRA, 2006, p. 209) Partindo-se deste princípio, utilizou-se então a ferramenta do Simulink® do Matlab® de modo a simular o processo em questão e em seguida sintonizar controladores para este processo. Figura 21 - Diagrama de blocos da simulação. Fonte: Autoria própria 39 Figura 22 - Estrutura adotada para o PID industrial em série com filtro de 1ª ordem. Fonte: Stebel (2010) Utilizando-se também da ferramenta Sisotool® do Matlab®, realizou-se a sintonia automatizada (automated tunning) de modo a se obter as equações dos controladores e suas respostas a um degrau unitário. Os modelos utilizados pelo Sisotool são baseados nos modelos LTI do Matlab. Os parâmetros dos controladores obtidos, e suas respostas a um degrau serão apresentadas no próximo capítulo. 4.3 O modelo de Huang et al. (2008) O modelo proposto para o estudo do nível de um vaso de geração vapor baseia-se no modelo do nível perturbado pelo distúrbio vazão de alimentação de água apresentado na equação 21: G1 ( s ) = ε1 s ⋅ (T2 ⋅ s + 1) (21) onde T2 é igual a 10 e ε1 igual a 0,4. E também pelo modelo do nível perturbado pelo distúrbio vazão de vapor apresentado na equação 22: G2 ( s ) = TD ⋅ s + K D T1 ⋅ s ⋅ (T2 ⋅ s + 1) (22) onde T1 é igual a 3, T2 é igual a 2/3, TD é igual a 0 e KD é igual a 1. O modelo proposto pelo autor apresentou mais uma malha de controle acoplada referente a um controlador cascata visando minimizar os efeitos da variação de temperatura do vapor, utilizada para demonstrar um controlador preditivo. Como o presente estudo visa comparar apenas os modelos para o nível do vaso gerador de vapor, e propor apenas controladores usuais, utilizou-se novamente a ferramenta de controle do Matlab (Control and Estimation 40 Tools Manager), sintonizando os controladores através do automated tunning, apenas para o controle do nível, desacoplado do restante da malha de controle apresentada pelo autor. Para sintonizar um controlador para o presente modelo adotou-se novamente a arquitetura clássica, apesar desta não reproduzir a arquitetura proposta pelo autor. Os resultados são apresentados no próximo capítulo. Figura 23 - Arquitetura Clássica Fonte: Matlab® 4.4 O modelo de Xu, Li e Cai (2004) O modelo proposto para o estudo do nível de um vaso de geração de vapor baseia-se nas seguintes funções de transferência apresentadas nas equações 23 e 24: g p 2 (s) = g p1 ( s ) = −0, 064 1 + 80 ⋅ s 1, 23467 ⋅ e−20⋅s 2 (1 + 68 ⋅ s ) (23) (24) O modelo proposto foi utilizado para demonstrar um controlador preditivo. Como já descrito anteriormente, o presente estudo visa apenas comparar os modelos, e a partir deles propor controladores usuais. Desta forma, utilizando-se a ferramenta de controle do Matlab (Control and Estimation Tools Manager), sintonizaram-se os controladores através do automated tunning, para duas diferentes arquiteturas: uma arquitetura clássica, conforme já indicado na Figura 23 e outra arquitetura alternativa, mais próxima à proposta pelo autor, vide figura 24. Os resultados são apresentados no próximo capítulo. 41 Figura 24 - Arquitetura Alternativa Fonte: Matlab® 4.5 O modelo de Mrunalini, Kundu e Dutta (2006) O método analítico descrito por Mrunalini, Kundu e Dutta (2006), que desenvolveu um modelo de espaço de estados linear para um sistema gerador de vapor adaptado dos balanços de massa e energia apresentados por Aström e Bell (2000), descrito no item 4.1. Para melhor análise do modelo adotado, e com o objetivo de sua comparação aos demais modelos focos deste estudo, adotou-se a metodologia de conversão da forma de espaço de estados para a forma de função de transferência, utilizando-se da ferramenta Matlab®. A sequência de figuras 25 a 27 apresentam as linhas de comandos adotados no Matlab® que possibilitam a conversão de uma forma discreta em outra, convertendo as formas citadas. 42 Figura 25 – Linhas de comando para o modelo matricial. Figura 26 – Linhas de comando para o modelo espaço de estados, modelo discreto. 43 Figura 27 – Linhas de comando para a conversão do modelo de espaço de estados em função de transferência. 4.6 O modelo de Marques (2005) Marques (2005) também descreve um modelo de espaço de estados linear para um sistema gerador de vapor adaptado dos balanços de massa e energia apresentados por Aström e Bell (2000), descrito no item 4.1. Este modelo é aplicado a caldeiras nacionais atualmente em operação. A mesma forma de tratamento dos dados apresentada para o modelo de Mrunalini, Kundu e Dutta (2006), foi adotada para os dados apresentados por Marques (2005). Deste modo, para melhor análise do modelo adotado, e com o objetivo de fazer a analogia aos demais modelos focos deste estudo, adotou-se a metodologia de conversão da forma de espaço de estados para a forma de função de transferência, utilizando-se da ferramenta Matlab®. A sequencia de figuras 28 a 30 apresentam as linhas de comandos adotados no Matlab®. 44 45 Figura 28 – Linhas de comando para o modelo jacobiano. Figura 29 - Linhas de comando para o modelo espaço de estados, modelo discreto. 46 Figura 30 – Linhas de comando para a conversão do modelo de espaço de estados em função de transferência. Além deste modelo, em seu estudo é apresentado o comparativo entre o modelo linear e o não linear. Na sequência aplica ajustes para o modelo de três elementos pelo método do algoritmo genético, pela oscilação limite de Ziegler & Nichols e ainda pelo método da curva de reação de Cohen Coon. Os resultados significativos são reproduzidos no item 5.6, como referência para a discussão. 4.7 O modelo de Nanhua, Wentong e Ming (2006) O modelo proposto para o estudo do nível de um vaso de geração de vapor baseia-se nas seguintes funções de transferência apresentadas nas equações 25 e 26: G1 ( s ) = G2 ( s ) = 0, 018 13, 5 ⋅ s ² + s 1,92 0, 042 − 13, 3 ⋅ s + 1 s (25) (26) O modelo proposto foi utilizado para a validação do método apresentado pelo autor baseado em um preditor cinza (Grey predictor) adaptativo para uma caldeira de produção de 410t/h. 47 Adotando-se apenas controladores usuais para o modelo apresentado, a mesma metodologia aplicada aos demais autores foi adotada também para este modelo. Utilizando-se também da ferramenta de controle do Matlab (Control and Estimation Tools Manager), sintonizaram-se os controladores através do automated tunning, para a arquitetura clássica, conforme indicado na figura 24. O resultado obtido será apresentado no próximo capítulo. 48 5 RESULTADOS E ANÁLISES Neste capítulo utilizou-se a ferramenta Matlab® versão 6.5 para propiciar a simulação e a sintonia dos controladores estudados. Serão demonstrados também os resultados de simulações para os modelos demonstrados no capítulo anterior. Além disso, serão ainda ajustados os seus controladores para análise dos resultados, dentro da metodologia apresentada. Serão apresentadas as simulações para os seguintes sete modelos: • Modelo Boiler Demo®, • Modelo de Bequette (2003), • Modelo de Huang et al. (2008), • Modelo de Xu, Li e Cai (2004), • Modelo de Mrunalini, Kundu e Dutta (2006), • Modelo de Marques (2005), • Modelo de Nahua, Wentong e Ming (2006). 49 5.1 Resultados da Simulação do modelo Boiler Demo® Como apresentado no item 4.1, o resultado obtido da simulação disponível no demonstrativo do Matlab®, obtém o comportamento da variação da vazão de produção de vapor do tubulão (vaso gerador de vapor), proporcional à variação da vazão de água de alimentação. O comportamento obtido da simulação apresentada na figura 18 é observado na figura 31. Figura 31 – Comportamento da vazão de vapor pela variação da água de alimentação. Fonte: Mathworks® O resultado da simulação apresentada na figura 19, no item 4.1, é apresentado na figura 32. Observa-se que o comportamento obtido retrata a dificuldade em controlar o nível do vaso uma vez que o mesmo é suscetível à variação da pressão do vapor e da vazão de produção do vapor, e sua variação não é linear. 50 Figura 32 – Comportamento da variação do nível do vaso gerador de vapor. 5.2 Resultados da Simulação do modelo de Bequette Os parâmetros obtidos para o modelo de Bequette através do automated tunning são apresentados na tabela 4. As respostas dos controladores a um degrau unitário são demonstradas nas figuras 33 a 36. Tabela 2 – Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab® KI TD Controlador KP P 1,1642 PI 0,003928 450 PID 1,7577 0,3333 3,61 PID com filtro 478,77 3,027 3,704 51 Figura 33 - Resposta do controlador P (ITSAE) a um degrau unitário. Figura 34 - Resposta do controlador PI (ITSAE) a um degrau unitário. 52 Figura 35 - Resposta do controlador PID (ITSAE) a um degrau unitário. Figura 36- Resposta do controlador PID com filtro (ITSAE) a um degrau unitário. Utilizando-se a metodologia de sintonia por Ziegler e Nichols, cujos resultados obtidos foram simulados no Simulink e são apresentados na tabela 5. Na sequência das figuras 37 a 40 apresenta-se a resposta destes respectivos controladores. 53 Tabela 3 – Parâmetros dos Controladores obtidos por Zigler & Nichols. Controlador KP P 1,755 PI 1,5795 8,3333 PID 2,106 5 Figura 37 - Resposta do controlador P. TI TD 1,25 54 Figura 38 - Resposta do Controlador PI Figura 39 - Resposta do controlador PID. Como se observa, as duas metodologias de ajuste dos controladores não obtiveram parâmetros semelhantes, não apresentando em alguns casos nem mesmo ordens de grandeza 55 semelhantes. No entanto, os resultados demonstrados através dos gráficos são bastante demonstrativos e apresentaram, a exceção da figura 39, um bom desempenho de controle. Melhores ajustes do controle de tubulões são propostos quando são empregadas outras estruturas de controle. Desta forma propõem-se os arranjos de 2 e 3 elementos. Inicialmente implementa-se um controle feedback, que no entanto, quando se observa um tempo morto grande em relação à constante de tempo forem grandes, este controle sozinho se torna ineficaz a corrigir grandes oscilações, distanciando-se do ponto de ajuste. Por isso é que para o controle deste sistema foi implantado concomitantemente, um controlador feedforward, com o objetivo de medir as perturbações e assim ter uma resposta mais eficiente. Bequette (2003) também propôs arranjos de dois e três elementos, visando compensar o efeito das perturbações antecipadamente. Adotou-se então, duas novas simulações baseada nas propostas por Bequette (2003). O diagrama de blocos da figura 41 exemplifica o arranjo de três elementos. As estruturas simuladas e suas respostas são apresentadas nas figuras 41, 44 e 43, 45 respectivamente. Figura 40- Diagrama de controle e instrumentação do modelo de três elementos para o controle de nível do vaso de vapor. Fonte: Adaptado de Bequette (2003, p. 666) 56 Figura 41- Diagrama do processo simulado, interface Simulink. Fonte: Adaptado de Bequette (2003, 667) As simulações em questão tomaram como base o arranjo apresentado por Bequette (2003), mas foi adotada a metodologia de configuração de um controle feedforward de Campo e Teixeira (2006), exemplificado no item 3.3, e as respostas obtidas através configurações propostas são apresentadas na figura 43 e 45 O comportamento dos distúrbios do processo referentes ao aumento da demanda de vapor (consumo de vapor) e alimentação de água ao tubulão, baseados na mesma simulação, são demonstrados na figura 43. Observa-se que o aumento da demanda de vapor faz com que a tendência do nível caia, e ainda que o aumento da alimentação de água faça com que o nível do vaso suba rapidamente. Através desta mesma figura conclui-se que, apesar dos distúrbios interferirem drasticamente no nível do vaso gerador de vapor, o ajuste de um bom controlador faz com que os efeitos dos distúrbios sejam minimizados. 57 Figura 42 – Comportamento dos distúrbios do processo. A resposta do sistema à estrutura de dois elementos é observada na figura 43. Nesta figura observa-se o comportamento do controlador adotado. Figura 43 - Resposta do controle apresentado para a estrutura de dois elementos. 58 De maneira análoga a estrutura para o sistema com três elementos é apresentada na figura 44, onde é incorporado um segundo controlador ao sistema. Seu desempenho é observado na figura 45, em que se observa a saída de ambos os controladores com um comportamento mais acentuado visando minimizar os efeitos dos distúrbios, e ainda, verificase um menor tempo de acomodação, obtendo-se a estabilização do processo em menor tempo, quando comparada à resposta obtida para a estrutura de dois elementos. Figura 44 - Diagrama do processo simulado, interface Simulink. Fonte: Adaptado de Bequette (2003, 667) Figura 45 - Resposta do controle apresentado para a estrutura de três elementos. Os parâmetros dos controladores ajustados para as duas estruturas são apresentados na tabela 6. 59 Tabela 4 – Parâmetros ajustados para os controladores Controlador Controlador Primário KP 1,579 KI 8,333 TD - Controlador Secundário 0,960 6,750 1,250 Conforme proposto pelo autor, adicionou-se uma saturação aos controladores, e o desempenho deste recurso é apresentado na figura 46. O efeito desta saturação é a obtenção de menor sobre sinal na variação do nível, com menor amplitude em comparação ao desempenho sem a saturação. Figura 46 - Resposta do controle apresentado para a estrutura de três elementos com saturação do controlador. Com as respostas apresentadas destas últimas simulações (figuras 43, 45 e 46), constata-se a eficácia em se incorporar ao sistema um controlador feedforward em complemento ao controlador feedback. 5.3 Resultados da Simulação do modelo de Huang et al.(2008) Análogo aos resultados obtidos para o modelo de Bequette (2003) através da utilização da ferramenta automated tunning são apresentados na tabela 7 e figuras 47 a 49, os resultados adotando-se a arquitetura apresentada na figura 23, para o modelo de Huang et al.(2008). 60 Tabela 5 – Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab® Controlador P KP - KI PI 9,000 90,090 PID -5,000 0,203 4,926 PID com filtro -500,750 2,203 0,456 Figura 47 - Resposta do controlador PI (ITSAE) a um degrau unitário. TD 61 Figura 48 - Resposta do controlador PID (ITSAE) a um degrau unitário. Figura 49 - Resposta do controlador PID com filtro (ITSAE) a um degrau unitário. Diferente do modelo apresentado no item anterior, o presente modelo não apresentou um comportamento ideal à sintonia automática. Para o presente modelo não pôde ser determinado um controlador proporcional, e o controlador PI não se mostrou representativo. 62 Por sua vez o controlador PID apresentou muito ruído para os parâmetros determinados automaticamente, não sendo uma situação desejada à sintonia de um controlador. A resposta do PID com filtro apresentou um melhor comportamento, e através de sua resposta observa-se nitidamente a resposta inversa intrínseca ao processo. Na prática, adotam-se muitos controladores com filtros para esse tipo de processo, uma vez que na dificuldade em se controlar a resposta inversa onde a compensação de um controlador possa levar o processo ao sentido contrário ao desejado, opta-se por “filtrar” o controle no período transiente, “ativando” o controlador apenas após o efeito da resposta inversa. Esta solução para o controle de nível de tubulões é bastante adotada dependendo-se do conhecimento do processo de modo a se ajustar o melhor filtro, da capacitância do vaso que deva ser tão grande quanto necessária à absorção da oscilação evidenciada, e do tempo de resposta desejado para o referido processo. A reprodução da simulação apresentada pelo autor no Simulink®, conforme apresentado na figura 50, também não foi representativa e, portanto, seus resultados não serão apresentados. O modelo apresentado para a simulação representou muito bem o comportamento dos distúrbios de vazão de vapor e de água de alimentação, mas, como o arranjo original possuía a malha referente à cascata de controle da temperatura do vapor, que por não ser foco deste estudo foi excluída e desacoplada, tornando o modelo não representativo à sintonia de um controlador desacoplado do restante do sistema. 63 Figura 50 – Simulação proposta pelo autor para o modelo de controle de nível do vaso gerador de vapor. Fonte: Adaptado de Huang et al.(2008) 5.4 Resultados da Simulação do modelo de Xu, Li e Cai (2004) Análogo aos resultados obtidos para os modelos anteriores, são apresentados nas tabelas 8, 9 e 10, e nas figuras 51 a 60 para os resultados do modelo de Xu, Li e Cai (2004), para duas diferentes arquiteturas, conforme esclarecido no item 4.4. Tabela 6 - Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab® para a arquitetura clássica. Controlador KP KI TD P -78,323 PI -26,092 145,9854 PID -899,800 13,635 19,837 PID com filtro -1,309x109 0,030 4184,100 64 Figura 51 - Resposta do controlador P (ITSAE) a um degrau unitário. Figura 52 - Resposta do controlador PI (ITSAE) a um degrau unitário: 65 Figura 53 - Resposta do controlador PID (ITSAE) a um degrau unitário. Figura 54 - Resposta do controlador PID com filtro (ITSAE) a um degrau unitário. Frente às respostas obtidas observa-se que o controlador que melhor se ajustou ao modelo proposto para a arquitetura clássica, foi o PID. O controlador PI também apresentou 66 bom desempenho, com sobre sinal e tempo de resposta próximos ao PID. Já o controlador PID com filtro apresentou alto ruído, devendo ser, portanto evitado. De forma análoga, os resultados obtidos para a arquitetura alternativa, composta por dois controladores, conforme proposta do autor, são demonstrados nas tabelas 9 e 10 e suas respostas nas figuras 55 a 60. Como já esclarecido, esta arquitetura foi adotada por se assemelhar à proposta pelo autor, e para sua sintonia procede-se inicialmente o ajuste do controlador (C2) interno e posteriormente o externo (C1), conforme sequência das respostas apresentadas. Tabela 7 - Parâmetro dos controladores C1 obtidos através da ferramenta de sintonia automática do Matlab® para a arquitetura alternativa Controlador KP KI TD P - PI -3,542 35,460 PID -36,817 0,023 43,100 PID com filtro -278,040 0,302 1,422 Tabela 8 – Parâmetro dos controladores C2 obtidos através da ferramenta de sintonia automática do Matlab® para a arquitetura alternativa Controlador KP KI TD P - PI 0,947 9,434 PID -5,000 0,102 9,804 PID com filtro 499,630 0,172 5,814 67 Figura 55- Resposta do controlador C2 PI (ITSAE) a um degrau unitário. Figura 56 - Resposta dos controladores C1 e C2 PI (ITSAE) a um degrau unitário. 68 Figura 57 - Resposta do controlador C2 PID (ITSAE) a um degrau unitário. Figura 58 - Resposta dos controladores C1 e C2 PID (ITSAE) a um degrau unitário. 69 Figura 59 - Resposta dos controladores C2 PID com filtro (ITSAE) a um degrau unitário. Figura 60 - Resposta dos controladores C1 e C2 PID (ITSAE) a um degrau unitário. A análise da resposta deste modelo para a arquitetura alternativa se assemelha à resposta obtida para o modelo de Huang et. al (2008), onde não se pôde determinar um controlador proporcional, e o controlador PI não se mostrou representativo. 70 Da mesma forma, o controlador PID apresentou muito ruído para os parâmetros determinados automaticamente, não sendo uma situação desejada à sintonia de um controlador, devendo ser evitado. Já a resposta do PID com filtro apresentou o melhor comportamento, e na figura 60 pôde-se observar a importância de se incluir um novo controlador ao sistema, ajustando a resposta apresentada na figura 59. Sua resposta também mostrou nitidamente a resposta inversa intrínseca ao processo, e ainda, conforme já esclarecido, processos com filtro são bastante adotados para o controle de nível de tubulões. O modelo apresentado pelo autor para a simulação deste processo, conforme apresentado na figura 61, foi utilizado com o objetivo de se demonstrar o comportamento de um controlador preditivo. Desta forma, não foi possível adotar o arranjo proposto para simular e ajustar um controlador usual, conforme objetivo do presente estudo. Figura 61– Simulação proposta pelo autor para o modelo de controle de nível do vaso gerador de vapor. Fonte: Adaptado de Xu, Li e Cai (2004) 5.5 Resultados da Simulação do modelo de Mrunalini, Kundu e Dutta (2006) Baseado no trabalho de Aström e Bell (2000) o resultado do modelo apresentado, após o tratamento dos dados do modelo de Mrunalini, Kundo e Dutta no domínio de espaço de estados, conforme apresentado no item 4.4, obteu-se o comportamento dinâmico multivariável das variáveis de saída do processo em resposta a um degrau nas variáveis de entrada, como pode ser visto na figura 62. 71 Figura 62 - Resultados para o modelo de Mrunalini, Kundu e Dutta, onde: Entrada(1): Vazão de geração de Vapor, Entrada(2): Vazão de água de alimentação, Entrada(3): Vazão de combustível (carga térmica) e Saída(1): Nível, Saída(2): Pressão Observa-se que a coerência dos resultados obtidos com o processo conhecido, através da queda do nível do vaso, com o comportamento inicial de resposta inversa, junto à queda da pressão do vaso em resposta à um aumento da vazão de geração de vapor. Da mesma forma observa-se o aumento do nível do tubulão com proporcional queda da pressão para um aumento na alimentação de água no vaso. Isto ocorre porque a água fria ao entrar no vaso condensa as partículas de vapor fazendo com que a pressão do vaso caia. Por fim, observa-se o comportamento de queda do nível com o aumento de combustível, ou seja, aumento de carga térmica, vaporizando a fase líquida. Neste trabalho foram selecionados como entrada do sistema de múltiplas entradas e múltiplas saídas: a vazão de água de alimentação, a vazão do combustível, e o vazão de vapor, variáveis de estado o volume de água, pressão do vaso, volume do vapor, e fração mássica de vapor, e como variáveis de saída, a pressão do vaso e o nível do vaso. Considerando o modelo apresentado MIMO (multiple input multiple output). O modelo não linear de espaço de estados foi linearizado pelo autor utilizando a aproximação da série de Taylor e o método jacobiado, junto aos valores iniciais das variáveis determinadas no ponto de alimentação médio. A principal importância em se desenvolver um modelo espaço de estados linear, segundo Mrunalini, Kundu e Dutta (2006), é possibilitar a implementação de uma estratégia 72 de controle precisa e acurada para múltiplas variáveis de saída, tais como a pressão do vaso e o nível de água do vaso, por um sistema de controle apropriado e bem projetado. 5.6 Resultados da Simulação do modelo de Marques (2005) De forma semelhante à Mrunalini, Kundo e Dutta (2006), Marques também baseou-se no modelo apresentado por Aström e Bell (2000) e aplicou seu modelo linear à um sistema conhecido de uma Caldeira de pressão de operação igual a 8.500.000 Pa e vazão de geração de vapor de 36 kg/s. Tratando-se os dados do modelo apresentado obteve-se o comportamento para o sistema apresentado na figura 63. Figura 63 - Resultados para o modelo de Marques, onde: Entrada(1): Pressão do vaso de vapor, Entrada(2): Vazão de geração de vapor e Entrada(3): Vazão de água de alimentação, sendo a única saída analisada: o nível. Os resultados obtidos por Marques (2005) assemelham-se aos obtidos para o modelo de Mrunalini, Kundu e Dutta (2006). Observa-se igual coerência aos resultados obtidos com o comportamento esperado para o processo já conhecido, através do aumento do nível com o aumento de pressão no vaso, gerado pela maior formação de bolhas dentro do nível líquido. 73 De forma análoga observa-se a queda do nível devido o aumento do consumo de vapor gerado. Por fim observa-se o aumento do nível com o aumento de vazão de água de alimentação, observando-se de forma tênue a presença do comportamento de resposta inversa inicial. Além deste modelo, o autor obteve o ajuste do controlador para este processo adotando o procedimento de oscilação limite de Ziegler & Nichols, cujos resultados obtidos são apresentados na tabela 11. Comparativamente estes parâmetros obtidos não coincidiram em ordem de grandeza com os parâmetros obtidos para os demais modelos apresentados neste estudo, mas apresentaram bastante representatividade para o processo adotado por Marques (2005) que foi validado com dados reais. Tabela 9 – Parâmetros dos controladores apresentados por Marques (2005). Controlador KP KI TD P 45,00 PI 40,50 125,00 PID 54,00 75,00 18,75 PID com filtro - - - 5.7 Resultados da Simulação do modelo de Nahua, Wentong e Ming (2006) Tabela 10 – Parâmetro dos controladores obtidos através da ferramenta de sintonia automática do Matlab®. KI TD Controlador KP P - PI -0,369 7246,377 PID -2,483 169,918 4,761 PID com filtro - - - O controlador proporcional apresentou um comportamento instável em malha fechada e, portanto, não pôde ser sintonizado para o presente modelo. Da mesma forma, o PID com 74 filtro não foi representativo e o automated tunning não conseguiu gerar uma resposta de sintonia para a arquitetura apresentada referente a este controlador. As respostas a um degrau unitário são apresentadas nas figuras 64 e 65. Figura 64 - Resposta do controlador PI (ITSAE) a um degrau unitário Figura 65- Resposta do controlador PID (ITSAE) a um degrau unitário. 75 O processo associado ao controle de nível costuma a ter constante de tempo dominante muito maior que o tempo morto então o controlador se aproxima a um PI puro. (Campos, Teixeira, 2006). Esta constatação pôde ser visualizada para o modelo do presente autor e é visualizada através das respostas obtidas ao um degrau unitário, visualizada na figura 65, evidenciando que os controladores mais indicados a este processo, são os controladores PI, sendo que neste caso o termo derivativo não é expressivo. Através dos controladores PI e PID especificados, verificou-se novamente que apenas um controlador não consegue eliminar a resposta inversa inicial deste processo. Comparando-se estes dois controladores, constata-se efetivamente que o controlador PI apresenta uma resposta mais rápida para o referido processo, confirmando a literatura. 5.8 Resumo dos resultados Como já expressado, cada autor adotou uma metodologia diferente para gerar um modelo representativo ao mesmo processo alvo. Os resultados demonstrados neste estudo, através das simulações efetuadas conforme a metodologia respectiva à cada um dos modelos, obtiveram como principal resultado a percepção da manipulação dos modelos estudados. Por se tratarem de modelos distintos, não é possível a comparação qualitativa entre os resultados, uma vez que a adoção de metodologias distintas pode refletir na qualidade dos resultados. Desta forma, o resumo dos resultados obtidos é apresentado na tabela 13. 76 Tabela 11 – Resumo dos resultados obtidos Modelo Descrição ® Boiler Demo - Modelo representativo, - Baseado em tabelas de vapor, - Boa resposta à variação de pressão e temperatura. Bequette (2003) - Modelo didático, - Possibilidade de controle por três elementos, - Junção de controladores feedback e feedforward - Parâmetros para o PID facilmente determinados e sintonizados, - Ideal para projeto e sintonia de sistemas. Huang et al. (2008) - Modelo baseado nos distúrbios do processo, - Difícil simulação e sintonia, - Proposta de utilização de um filtro para o controle do sistema. 77 Continuação da Tabela 13: Xu, Li e Cai (2004) - Arquitetura alternativa com dois controladores, - Um controlador PID com filtro foi suficiente para sintonizar o modelo apresentado. Mrunalini, Kundu Dutta (2006) Marques (2005) Nahua, Wentong Ming (2006) e - Modelo em espaço de estados não linear baseado em Åstrom, - Fácil tratamento dos dados com bastante representatividade, - Possibilidade de se obter um modelo com maior precisão por estar baseado em múltiplas entradas e múltiplas saídas. - Modelo em espaço de estados semelhante a Mrunalini, Kundu e Dutta, também baseado em Åström, - Modelo representativo e validado. e - Modelo de difícil reprodução, - Melhor ajuste de controle para o controlador puramente PI, - Resposta mais rápida, - Confirmação da necessidade de mais um controlador para melhor controle do sistema proposto. 78 6 CONCLUSÕES Os modelos estudados no presente projeto apresentaram-se bastante representativos, fazendo com que os objetivos gerais e específicos do presente estudo fossem atingidos. Nas diversas aplicações apresentadas no presente trabalho observou-se que a resposta inversa é virtualmente equivalente ao tempo morto; seu ganho dinâmico é integrado, e ele desenvolve um período natural aproximadamente quatro vezes maior ao valor observado. Comparando-se ao tempo morto, a resposta inversa se comporta melhor na presença de uma ação derivativa, mas pior sem ela. Infelizmente o ruído presente nas medições de nível do vaso exime o uso da ação derivativa, perdendo-se esta vantagem. A comparação entre os diferentes modelos apresentados pelos diferentes autores criou a possibilidade de avaliar e adotar o modelo mais adequado associado ao resultado desejado dentro da aplicação estudada. Mesmo que os processos de geração de vapor sejam semelhantes entre si, alguns deles requerem certos cuidados. A atenção especial ao controle de nível se dá a processos em que a injeção do vapor gerado é direto no processo, devendo desta forma ser minimizado ao máximo qualquer oscilação do processo. Com o presente estudo também ficou claro que alguns processos, tais como caldeiras que suprem vapor como utilidade, possuem o foco no controle baseado na qualidade, ou seja, a pressão, do vapor gerado. Outros processos mais críticos necessitam do controle de nível mais acurado por possuírem pequeno tempo de residência do vaso, sem absorver facilmente variações do nível. Outra conclusão obtida foi à importância de se realizar simulações dos processos e seus controladores antes de ajustar na prática o controlador em questão. Esta atitude garante a segurança do processo e a qualidade da malha proposta. Dentre os modelos comparados, o modelo de Bequette (2003) foi considerado o mais reprodutivo e que proporcionou maiores análises. Através dele foi possível observar a importância e o comportamento do sistema já difundido de controle com três elementos. A adoção dos controladores feedback e feedforward foram assim justificados, conforme a tabela 13. Futuros trabalhos podem ser desenvolvidos avaliando-se o comportamento do nível através das variações de carga térmica do sistema de geração de vapor. E ainda uma nova estrutura de controle pode ser sugerida adotando-se mais uma válvula de controle para drenar o vaso toda vez que o nível subir abruptamente, e o controle principal não conseguir responder. O ajuste de tempo destas malhas deverá ser estudado de modo que a primeira seja 79 mais rápida e possa atuar a contento durante o transiente do processo, sem causar descontrole do nível. Sendo assim, o presente estudo apresentou diferentes formas de se modelar o processo de geração de vapor, bem como de se tratar o controle de nível do seu vaso. Através da elaboração deste estudo verificou-se que o tema em questão é bastante didático para o desenvolvimento de diversos tipos de controladores, dos mais simples aos mais sofisticados. O processo é bastante representativo, pois possui perturbações intrínsecas que o torna de grande interesse de estudo e bastante flexível ao desenvolvimento de formas de controle. 80 REFERÊNCIAS ALTMAN, Wolfgang. Practical Process Control for Engineers and Technicians. Oxford: Elsevier, 2005. ANSI/ISA–77.42.01 - Fossil Fuel Power Plant Feedwater Control System - Drum Type – America National Standard, Carolina do Norte, Estados Unidos, 1999. Disponível em: <http://www.isa.org> Acesso em 23/06/2010, 08:40. ARNAO, Juan H. S. Caldeiras Aquatubulares de Bagaço – Estudo do Sistema de Recuperação de Energia. 2007. 233 f. Tese (Doutorado em Engenharia Mecânica) – Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas, Campinas, 2007. ÅSTRÖM, Bell. Drum Boiler Dynamics. Automatica 36, 2000. Disponível em: <http://www.dei.unipd.it/~picci/Files/TEACHING/CONTROLLO_DEI_PROCESSI/DrumBo iler.pdf> Acesso em 19/06/2010, 14:25. BEQUETTE, Wayne B. Process Control: Modelin, Design, and Simulation. Prentice Hall Internacional. New Jersey: 2003. BRACCO, S., TROILO, M., TRUCCO, A. A simple dynamic model and stability analysis or a steam boiler drum, 2009. Disponível em: <http://journals.pepublishing.com/content/u8w685504k741088/> Acesso em: 11/04/2010, 10:15. CAMPOS, Mario Cesar M., TEIXEIRA, Herbert C. G. Controles Típicos de equipamentos e processos industriais. São Paulo: Editora Edgard Blücher, 2006. CYBOSOFT®. Model-Free Adaptive Control of Steam Drum Level. CyboSoft, General Cybernation Group, Inc., 2010. Disponível em:< http://www.cybosoft.com/ats/ats_3.htm> Acesso em: 21/08/2010, 21:34. EINSTEIN, Albert. Disponível em <http://www.pensador.info/autor/Albert_Einstein/7/> Acesso em: 11/04/2010, 16:22. FELDMAN, Joel. Discrete Time Linear, Time Invariant Systems and Z Transforms., 2007. Disponível em: <http://www.math.ubc.ca/~feldman/m267/ltiz.pdf > Acesso em: 21/10/10, 19:36. FRASCATI MANUAL – Proposed Standard Practice for Surveys on Research and experimental development, 2002. Disponível em: <http://www.mct.gov.br/index.php/content/view/4639.html> Acesso em 23/04/2010 21:14. GAIKWAD, Avinash J., VIJAYAN, P. K., IYER, Kannan, BHARTIYA, Sharad, KUMAR, Rajesh, LELE, H. G., GHOSH, A. K. Effect of Loop Configuration on Steam Drum Level Control for a Multiple Drum Interconnected Loops Pressure Tube Type Boiling Water Reactor. IEEE Transactions on Nuclear Science, vol. 56, no. 6, dezembro de 2009. 81 Disponível em: < http://ieeexplore.ieee.org/xpl/periodicals.jsp> Acesso em: 30/07/2010, 18:36. HUANG, Wei, HUANG, Qiaoli, HE, Qiang, ZHAO, Yixin, QI, Qian, DAI, Lijuan. Decoupling Control for Steam and Water System, 2008. Disponível em: < http://ieeexplore.ieee.org/xpl/periodicals.jsp> Acesso em: 30/07/2010, 18:36. JOHAN, Karl, ÅSTRÖM, Bell, MURRAY, Richar. Feedback Systems: An Introduction for Scientists and Engineers. California Institute of Technology, 2004 KIM, H., CHOI, S. A model on water level dynamics in natural circulation drum-type boilers, 2005. Disponível em: <http://www.sciencedirect.com> Acesso em: 09/04/2010, 18:52. LIMA, Carlos Raimundo Erig. Notas de aula de fundamentos de controle. Especialização em Automação Industrial, Universidade Tecnológica do Paraná, Curitiba: 2009. MARQUES, Francisco de Assis Pinto. Modelagem e Controle de Nível do Tubulão de uma Caldeira Aquatubular de uma Refinaria de Petróleo. Universidade Federal do Rio de Janeiro, Rio de Janeiro: 2005. Disponível em: <http://www.pee.ufrj.br/teses/textocompleto/2005040801.pdf> Acesso em: 29/08/2010, 10:42. MARTIN, Carla et. al. Interactive Simulation of Object-oriented hybrid models, by combined use of EJS, Matlab/Simuling and Modelica/Dymola. 18th European Simulation Multiconference, Graham Horton SCS Europe, 2004. Disponível em: <http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.137.3284&rep=rep1&type=pdf> Acesso em: 28/08/2010, 15:12. MARTIN, Carla, URQUIA, Alfonso, DORMIDO, Sebastian. Object-oriented Modeling of Virtual Laboratories for Control Education. Dept. Informática y Automática, E.T.S. de Ingeniería Informática, U.N.E.D., Madrid, 2005. Disponível em: <http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.101.9023&rep=rep1&type=pdf> Acesso em: 28/08/2010, 15:26. MATHWORKS® Simulink Control Design: Regulating Pressure in a Drum Boiler. The MathWorks, Inc., 1994-2010. Disponível em: <http://www.mathworks.com/products/simcontrol/demos.html?file=/products/demos/shipping /slcontrol/scdboilerpad.html> Acesso em: 28/08/2010, 18:42. MINISTÉRIO DO TRABALHO, NR-13: Caldeiras e vasos de pressão, Disponível em: <http://www.mte.gov.br/legislacao/normas_regulamentadoras/nr_13.pdf> Acesso em 12/04/2010 19:23. MORADI, Hamed, BAKHTIARI-NEJAD, Firooz, SAFFAR-AVVALORADI, Majid. Robust Control of na Industrial Boiler System; a comparison between two approaches: Sliding mode control & H technique. Energy and Control Centre of Excellence, Deparment of Mechanical Engineering, Amirkabir University of Technology, Tehran, Iran, 2009. Disponível em: Energy Conversion and Management 50, pags. 1401-1410 < www.elsevier.com/locate/enconman> Acesso em: 27/08/2010, 10:13. 82 MRUNALINI, K., KUNDU, P., DUTTA, K. K. State Space Model for Drum Boiler System. Jadavpur University, Kolkata: 2006. NAHUA, Yu, WENTONG, Ma, MING, Su. Application of adaptive Grey predictor based algorithm to boiler drum level control, 2006. Disponível em: <http://www.sciencedirect.com> Acesso em: 09/04/2010, 18:47. PERRY, Robert H., GREEN, Don W. Chemical Engineers Handbook. 7. ed. Nova Iorque: McGraw-Hill, 1999. SEBORG, Dale E., EDGAR, Thomas F., MELLICHAMP, Duncan A. Process Dynamics and Control. Estados Unidos: John Wiley & Sons Inc., 1989. SHINSKEY, F. Greg. Process Control Systems Application, Design and Tuning 3. ed. Nova Iorque: McGraw-Hill Publishing Company, 1988. STEBEL, Sergio Leandro. Notas de aula de sintonia de controladores e estratégias de controle. Especialização em Automação Industrial, Universidade Tecnológica do Paraná, Curitiba: 2010. UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. Normas para elaboração de trabalhos acadêmicos. Curitiba: Editora da UTFPR, 2008. XU, Min, LI, Shaoyuan, CAI, Wenjian Cascate generalized predictive control strategy for boiler drum level, 2004. Disponível em: <http://www.sciencedirect.com> Acesso em: 09/04/2010, 18:51.
Baixar