PRH-ANP 16
RELATORIO FINAL
PROGRAMA DE RECURSOS HUMANOS DA
ANP PARA O SETOR PETRÓLEO E GÁS -PRH--ANP//MME//MCT
PRH-ANP 16
PU
UP
UNIVERSIDADE FEDERAL DE ITAJUBÁ
MONOGRAFIA:
“Controle e Supervisão de pressão e vazão
em Gasodutos”
Bolsista: Fábio Pereira Feletto
Orientador: Prof. Dr. Carlos Alberto Murari Pinheiro
Período: Agosto/2003 a Setembro/2005
I
PRH-ANP 16
RELATORIO FINAL
DEDICATÓRIA
Dedico este trabalho a Deus, a minha família, meus amigos e a todos
que compartilharam junto a mim momentos de alegria e tristeza.
I
PRH-ANP 16
RELATORIO FINAL
AGRADECIMENTOS
Agradeço a minha família e a todos que me ajudaram nos momentos de
dificuldade para realização deste trabalho.
Agradeço ao orientador Professor Carlos Murari Pinheiro pela ajuda no
desenvolvimento deste trabalho.
Agradeço ao Programa de Recursos Humanos da Agência Nacional de
Petróleo da Universidade Federal de Itajubá PRH-ANP 16, pela
oportunidade recebida para concretização desta pesquisa, em especial
aos coordenadores do programa Professores Jamil Haddad e Roberto
Alves de Almeida.
II
PRH-ANP 16
RELATORIO FINAL
RESUMO
A utilização de gasodutos é a maneira mais eficaz para o transporte de gás
natural em longas distâncias, de forma que este gera um envio contínuo e
ininterrupto de gás.
O controle e supervisão das variáveis vazão e pressão são de fundamental
importância para o funcionamento correto e seguro da rede. Para isso, a
instalação depende de uma grande quantidade de equipamentos estar
funcionando e se comunicando de maneira confiável, desde compressores
em estações de compressão a válvulas de bloqueio de gás natural. Este
trabalho vem em uma etapa inicial reunir informações descritivas dos
componentes e dispositivos de um sistema de transporte de gás natural por
dutos, passando pelos seus modelos, equações, maneiras de atuação e
forma de controle.
Os equipamentos de controle bem como o sistema SCADA de controle e
supervisão de variáveis comumente utilizados nas instalações de
gasodutos foram descritos analisando suas características e as novas
tecnologias que poderão ser utilizadas em futuras construções e
modernizações da malha existente.
Na parte de simulação computacional, foram utilizados os modelos e
equações obtidas previamente para simular o controle do compressor
centrifugo de uma estação de compressão, além da plotagem de algumas
de suas curvas especificas.
Palavras Chaves: Gás Natural, Gasoduto, Sistema de controle, Controlador
Programável, Supervisório, SCADA , Simulação.
III
PRH-ANP 16
RELATORIO FINAL
ABSTRACT
The use of gas pipelines is the way most eficient for natural gas transport in
long distances, of form that this provides a continuous and ininterrupted
sending.
The control and supervision of flow and pressure variables has a lot of
importance in order to correct and safe working of the net. For this, the
instalation depends of the work and communicating of a great amount of
devices and equipaments, since compression stations to natural gas block
valves. This work in a initial stage congregate descriptive information of the
components and devices of a natural gas pipeline system, passing for its
models, equations, performances and control way.
The equipament of controle as well SCADA system of control and supervision
with wide use in pipeline instalations was described analisyng its features and
the new technologies that can be used in next constructions or net
atualization.
In computational simulation part, was used the models and equations gotten
previously to simulate the control of a centrifugal compressor in a compressor
station, beyond the print of some specify curves.
Key Words: Natural Gas, Gas pipeline, Control system, Programable
Controller, Supervision, SCADA, Simulation.
IV
PRH-ANP 16
RELATORIO FINAL
SUMÁRIO
CAPÍTULO I - Descrição do sistema de transporte de gás natural por dutos e seus dispositivos
1.1.
Introdução .............................................................................................................. 1
1.2.
Componentes do sistema – Rede de dutos ........................................................... 2
1.3.
Compressores ......................................................................................................... 5
1.3.1.
Compressores à jato ............................................................................. 6
1.3.2.
Compressores alternativos .................................................................... 7
1.3.3.
1.4.
1.5.
1.6.
Efeito Simples ............................................................... 8
1.3.2.2.
Duplo Efeito .................................................................. 9
Compressores dinâmicos ....................................................................... 9
1.3.3.1.
Centrífugos ................................................................... 9
1.3.3.2.
Axiais .......................................................................... 13
Máquinas primárias (Prime Movers) ....................................................................... 13
1.4.1.
Motores Elétricos ................................................................................. 14
1.4.2.
Turbinas a Vapor ................................................................................. 15
1.4.3.
Turbinas a Gás .................................................................................... 15
Válvulas .................................................................................................................. 17
1.5.1.
Válvulas de Bloqueio ............................................................................ 20
1.5.2.
Válvulas de Alívio de Pressão .............................................................. 21
1.5.3.
Válvulas Reguladora de Pressão ......................................................... 21
Medidores ............................................................................................................... 21
1.6.1.
1.6.2.
1.7.
1.3.2.1.
Pressão ................................................................................................ 21
1.6.1.1.
Manômetros ...........................................……….…….. 22
1.6.1.2.
Strain Gauges .......................................……….……... 23
1.6.1.3.
Medidor Diferencial Capacitivo ................................... 23
Vazão ................................................................................................... 23
1.6.2.1.
Tipo Placa de Orifício ................................................. 24
1.6.2.2.
Tipo Ultrasom ............................................................. 24
Considerações ........................................................................................................ 26
CAPÍTULO II - Controle de fluxo e pressão em gasodutos
2.1.
Introdução ........................................................................................................ 27
2.2.
Estrutura do sistema ........................................................................................ 28
2.2.1. Estação de Compressão ...................................................................... 28
2.2.2. Estação de Entrega .............................................................................. 37
V
PRH-ANP 16
RELATORIO FINAL
2.2.3. Estação de Medição ............................................................................. 38
2.2.4. Válvulas De Bloqueio
....................................................................... 41
2.3.
Problemas ........................................................................................................ 41
2.4.
Considerações ................................................................................................. 43
CAPÍTULO III - Equipamentos digitais de processamento de controle
3.1.
Introdução ........................................................................................................ 44
3.2.
Equipamentos digitais de controle ................................................................... 44
3.2.1. Controladores Programáveis ............................................................... 45
3.2.1.1.
Estrutura Básica ......................................................... 45
3.2.1.2.
Funções Especiais ..................................................... 48
3.2.1.3.
Programa Aplicativo ................................................... 49
3.2.1.4.
Linguagens de Programação ..................................... 51
3.2.2. PC Industrial ........................................................................................ 52
3.2.3. Sensores Inteligentes .......................................................................... 54
3.3.
Estruturas de controle ...................................................................................... 54
3.3.1. Estruturas utilizando CP ...................................................................... 55
3.3.2. Fieldbus ............................................................................................... 56
3.4.
3.3.2.1.
Aspectos Técnicos ..................................................... 59
3.3.2.2.
Topologias em Fieldbus ............................................. 63
3.3.2.3.
FISCO ........................................................................ 63
Considerações ................................................................................................. 65
CAPÍTULO IV – Aplicação do sistema SCADA no controle e supervisão de gasodutos
4.1.
Introdução ........................................................................................................ 66
4.2.
Caracterização de um sistema SCADA ........................................................... 66
4.2.1. Sensores e Atuadores .......................................................................... 68
4.2.2. Estações Remotas ............................................................................... 68
4.2.3. Rede de Comunicações ....................................................................... 69
4.2.4. Estações de Monitoramento Central .................................................... 71
4.3.
Funções ........................................................................................................... 71
4.3.1. Aquisição de dados .............................................................................. 72
4.3.2. Visualização de dados ......................................................................... 72
4.3.3. Processamento de alarmes ................................................................. 73
4.3.4. Tolerância a falhas ............................................................................... 74
4.4.
Modos de comunicação ................................................................................... 74
VI
PRH-ANP 16
RELATORIO FINAL
4.4.1. Comunicação Mestre-Escravo ............................................................. 74
4.4.2. Comunicação por Interrupção .............................................................. 75
4.5.
Software …………………………………………………………………………...… 76
4.5.1. FactorySuite ………………………………………………………………... 77
4.6.
4.5.1.1.
Intouch ................................................……………..… 78
4.5.1.2.
Industrial SQL Server ……………………………………78
4.5.1.3.
FactorySuite Web Server .............…………................ 79
4.5.1.4.
InControl ..................................................................... 79
4.5.1.5.
I/O Servers ................................................................. 79
Considerações ................................................................................................. 80
CAPÍTULO V - Simulação de sistemas de controle e compressão em gasodutos
5.1.
Introdução ................................................................................................................... 81
5.2.
Simulação Computacional .......................................................................................... 82
5.3.
Simulação da compressão de gás natural .................................................................. 83
5.4.
Simulação de controle ................................................................................................ 89
5.5.
Softwares dedicados .................................................................................................. 93
5.6.
Considerações finais .................................................................................................. 94
BIBLIOGRAFIA .......................................................................................................................... 96
VII
PRH-ANP 16
RELATORIO FINAL
LISTA DAS FIGURAS
Figura 1: Perda de carga em tubulação horizontal ......................................................................... 5
Figura 2: diagrama exemplo de utilização de compressor à jato ................................................... 6
Figura 3: Diagrama do comportamento real de um compressor alternativo ................................... 7
Figura 4: Fator de perdas X razão de compressão- compressores alternativos ............................ 8
Figura 5: construção básica de um compressor centrifugo .......................................................... 10
Figura 6: Esquema funcional de uma turbina á gás ..................................................................... 15
Figura 7: Formas de estrangulamento de fluxo pelas válvulas .................................................... 18
Figura 8: Curva Head-Vazão ........................................................................................................ 30
Figura 9: Limite de surge .............................................................................................................. 32
Figura 10: Deslocamento do set-point por aumento da perda de carga pós-compressor ............ 34
Figura 11: Diagrama de fluxo interno de uma estação de compressão ....................................... 35
Figura 12: Estação de entrega ..................................................................................................... 38
Figura 13: Diagrama de blocos da medição ................................................................................. 39
Figura 14: Estação de medição .................................................................................................... 40
Figura 15: Estrutura básica de funcionamento do CP .................................................................. 45
Figura 16: Forma cíclica de trabalho do CP ................................................................................. 51
Figura 17: Etapas para programação de um CP .......................................................................... 52
Figura 18: Arquitetura tradicional com CP .................................................................................... 55
Figura 19: Arquitetura utilizando Fieldbus e instrumentos inteligentes ........................................ 59
Figura 20: Estrutura de controle e supervisão de processos ....................................................... 67
Figura 21: Esquema básico de funcionamento do sistema SCADA ............................................. 68
Figura 22: Estrutura de uma RTU com transmissão via radio modem ......................................... 70
Figura 23: Curva termodinâmica do compressor Solar C452 ....................................................... 85
Figura 24: Curva de compressor aproximada obtida através de modelo ..................................... 88
Figura 25: Curva de compressor aproximada para 8000 RPM .................................................... 88
Figura 26: Simulação do controle de capacidade de um compressor centrífugo por variação da
rotação .......................................................................................................................................... 90
VIII
PRH-ANP 16
RELATORIO FINAL
Figura 27: Pressão de descarga do compressor compensada .................................................... 91
Figura 28: Variação de rotação devido a degrau da pressão de descarga .................................. 92
Figura 29: Pressão de descarga para regime de distúrbio seqüencial ......................................... 92
Figura 30: Tela do software Pipeline Studio da Energy Solutions ................................................ 93
IX
PRH-ANP 16
RELATORIO FINAL
LISTA DE VARIÁVEIS
Q = Vazão volumétrica [cu ft/day]
Pb = Pressão base [psia]
Tb = Temperatura base [ºR]
(1/f )0,5 = fator de transferência
P1 = pressão entrada [psia]
P2 = pressão saída [psia]
T1= Temperatura de entrada [ºR]
T2= Temperatura de saída[ºR]
G = Constante do gás (ar=1)
T = média da temperatura do gás [ºR]
L = comprimento [milhas]
D = Diâmetro interno da tubulação [pol]
Di = Diâmetro do impelidor [pol]
Z = fator de compressibilidade
K = rugosidade efetiva [pol]
Kp= coeficiente de perda de carga
Le= comprimento equivalente
Re= Número de Reynolds
k = razão entre os calores específicos Cp/Cv
H = head real [pé/libra quad]
Hp= Head politrópico [pé/libra quad]
Hth= Head termodinâmico
H’= head por estágio [pé/libra quad]
Pex= Potencia requerida no eixo [Hp]
e0 = Eficiência geral do sistema
Hp= Head politrópico [pé/libra quad]
n = expoente politrópico da compressão
N = velocidade rotativa [RPM]
X
PRH-ANP 16
RELATORIO FINAL
P= numero de pares de pólos
µ = coeficiente de pressão
C1 = constante de proporcionalidade
f0= freqüência base [Hz]
θ = ângulo entra o onda e escoamento [graus]
Vs = velocidade do som no fluído [m/s]
Vm= velocidade media [m]
Ls= distancia entre os sensores [m]
Tm= tempo médio [s]
E= erro
SP=set point
XI
PRH-ANP 16
RELATORIO FINAL
CAPÍTULO I
TRANSPORTE DE GÁS NATURAL POR DUTOS
1.1- INTRODUÇÃO
A malha nacional de transporte de gás natural via dutos foi profundamente
modificada com a recente construção de novos gasodutos de grande porte e a
crescente demanda por este tipo de fonte energética proporciona uma maior
necessidade de otimização e expansão do sistema. Tal fato, portanto, modificou
a matriz energética brasileira e junto trouxe alguns gargalos tecnológicos
principalmente relacionados ao controle, supervisão e segurança de grandes
gasodutos, que exigem soluções específicas.
A simulação computacional por si só possui um caráter de extrema
importância relacionada com o tópico, uma vez que é através deste tipo de
atividade é que se torna possível a previsão de eventos sem a necessidade de
envolver o meio físico real. É possível também a análise da utilização de
determinados equipamentos utilizando tecnologia digital que possam atuar no
campo e realizar um trabalho otimizado.
Este trabalho vem descrever as peculiaridades do funcionamento de um
sistema de transporte de gás via dutos e seus componentes, auxiliando na
escolha das variáveis do processo que serão controladas, dos equipamentos e
sistemas digitais para controle e monitoramento à distância. Sugerindo
modificações em sistemas obsoletos e sugestões para implantação de novas
unidades.
Este capítulo mostra as características de um sistema de transporte de
gás
natural
por
dutos,
relacionando
seus
principais
componentes
e
equipamentos, e as equações que modelam as variáveis com o sistema em
funcionamento.
1
PRH-ANP 16
RELATORIO FINAL
1.2- COMPONENTES DO SISTEMA- REDE DE DUTOS
A rede de dutos é composta por peças de seção circular cilíndricas
geralmente compostas por aço, sendo interconectadas entre si de modo a se
obter uma linha contínua pela qual o fluído irá escoar. A espessura do gasoduto
é calculada a fim de suportar a pressão existente e a seção é obtida de modo a
atender a vazão de projeto da linha. Toda a tubulação deve ser preservada por
um sistema de proteção catódica para evitar a corrosão, além de um
revestimento anticorrosivo externo.
Uma gama de parâmetros relacionada à linha ou ao próprio gás natural
transportado influencia diretamente nas variáveis pressão e vazão ao longo do
sistema e, portanto devem ser considerados. Alguns parâmetros de maior
importância são:
-
Coeficiente de atrito;
-
Gravidade específica do gás;
-
Fator de transferência;
-
Temperatura;
A equação que determina a vazão do gás em dutos horizontais,
considerando a transferência do fluído como um processo isotérmico pode ser
expressa por : [1]
0 ,5
0,5
Tb 1 P12 − P 2 2
2 ,5
Q = 38.77.
. .
(1.1)
.D
Pb f GTLZ
A determinação do tipo de fator de transmissão depende do regime de
escoamento do fluído. Para isso existem algumas fórmulas de fluxo que já
consideram tal fator para o calculo da vazão. Estas fórmulas estão descritas a
seguir.
2
PRH-ANP 16
RELATORIO FINAL
Weimouth (para tubulação de aço):
0.5
Tb P12 − P22
2 , 667
Q = 433,5
D
Pb GTLZ
(1.2)
Panhandle A:
1, 0788
Tb
Q = 435,7
Pb
P12 − P22
0,8539
TLZ
G
0, 5392
D 2,6182
(1.3)
New Panhandle:
1, 02
Tb
Q = 737
Pb
P12 − P22
0,961
G TLZ
0, 51
D 2,53
(1.4)
De maneira geral, o regime de escoamento em operação natural dos
gasodutos é bastante turbulento com números de Reynolds bastante elevados.
Desta maneira o fator de transmissão se torna:
1
f
0 ,5
D
= 4 log 3,7
k (1.5)
e portanto a equação da vazão é expressa por:
0 ,5
2
2
Tb
3,7 D P1 − P2
2 ,5
Q = 155,08
log
D
Pb k GTLZ
(1.6)
Ao escoar por um trecho reto de tubulação, o fluído sofre uma perda de
energia denominada perda de carga distribuída que é diretamente proporcional
ao fator de atrito. Normalmente se utiliza um revestimento nas paredes internas
de pintura epóxi com o objetivo de diminuir o fator de atrito e assim diminuir as
perdas de carga.
3
PRH-ANP 16
RELATORIO FINAL
Existem vários tipos de equações para cálculo da perda de carga. Uma
delas é denominada equação de Darcy-Weisbach:
f .L.v 2
hf =
D.2 g (1.7)
Porém, durante toda a malha existem singularidades que pelo fato de
acarretarem perturbações no escoamento, ocasionam perda de cargas
localizadas maiores que a perda de carga distribuída e que são dadas por:
hf =
K p .v 2
2g
(1.8)
Entretanto, devido ao grande grau de empirismo destas equações (que podem
acarretar em grandes erros) é preferível realizar o calculo da perda através da
própria equação de vazão em linhas horizontais, fixando o valor de variáveis
como vazão e pressão inicial. Desta forma, é possível obter uma função da
perda de carga pelo comprimento da linha.
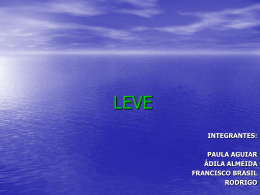
Fixando assim a pressão inicial como 92 Kg/cm2 (≈ 1310psi), assumindo uma
vazão de 20MMm3/dia (706,293 MMcft/dia) e assumindo valores típicos para a
situação temos para o caso de uma tubulação com diâmetro interno de 32
polegadas, a perda de carga levantada e representada no gráfico da figura 1:
4
PRH-ANP 16
RELATORIO FINAL
Figura 1: Perda de carga em tubulação horizontal
A perda de carga que ocorre na realidade deve ser acrescida das perdas
de carga localizadas e das perdas de carga devido ao relevo.
Nos períodos de baixo consumo ocorre uma tendência de elevação da
pressão na linha decorrente da diminuição da vazão. Desta maneira, o gasoduto
passa a realizar um acumulo de energia na forma de armazenamento de gás, o
que é uma característica importante, pois pode ser utilizado para suprir picos de
demanda. Quando o sistema possui a mínima vazão e a máxima pressão
denomina-se que o sistema é compatível. Na situação reversa, o sistema é
denominado não compatível.
1.3- COMPRESSORES
São estruturas mecânicas industriais de grande porte distribuídas pela linha de
dutos com a finalidade de elevar a energia do gás natural pelo aumento da
pressão, para que esta se encontre em um certo nível necessário para a sua
transmissão compensando assim perdas provenientes do próprio consumo e
pelo atrito com a parede interna do duto. Os tipos de compressores que podem
ser utilizados em gasodutos basicamente se dividem em três: [1]
5
PRH-ANP 16
-
Jato;
-
Dinâmicos
RELATORIO FINAL
o Centrífugos
o Axiais
-
Volumétricos do tipo Alternativo
o Efeito simples
o Duplo efeito
A definição do tipo de compressor a ser utilizado depende exclusivamente
das condições de operação do gasoduto e seus aspectos econômicos, sendo,
portanto o problema concentrado na definição da capacidade e na potência
requerida por máquina. Para ajudar na escolha são utilizados alguns métodos
como, por exemplo, através dos diagramas de Mollier.
1.3.1- Compressores à jato
Os compressores a jato não possuem partes rotativas e utilizam o
próprio gás a alta pressão para comprimir o gás à baixa pressão chegando assim
a um nível intermediário. São utilizados em campos de gás natural para estimular
poços com baixa pressão e assim aumentar a produção, além de permitir o
transporte em gasoduto que necessite de pressão intermediária.
A figura 2
apresenta um exemplo de utilização de um compressor à jato.
Figura 2: diagrama exemplo de utilização de compressor à jato
6
PRH-ANP 16
RELATORIO FINAL
1.3.2- Compressores alternativos
De maneira geral, são representados pelos compressores tipo êmbolo e
tipo membrana, sendo caracterizados como compressor volumétrico. São
constituídos por um cilindro onde existe um pistão (ou êmbolo) que se desloca
em movimento retilíneo alternativo, movimentado geralmente por um sistema de
transmissão do tipo biela-manivela, sendo que a entrada e a saída do fluído é
controlada por um conjunto de válvulas.
Desta maneira, um compressor alternativo durante um ciclo deve realizar
as operações de aspiração e descarga.
Analisando o comportamento termodinâmico real de um compressor
alternativo através de um plano de Clapeyron, obtemos o seguinte diagrama
ilustrado na Fig. 3:
Figura 3: Diagrama do comportamento real de um compressor alternativo
FONTE: [3]
As seções A e B (subpressão e sobrepressão respectivamente) ocorrem
devido à resistência dos condutos de admissão além das inércias das válvulas
de admissão e escape. Temos a existência também de um volume residual V “,
já que nem todo o fluído comprimido abandona o cilindro, pois o pistão não pode
chegar ao fundo deste onde ficam as válvulas, gerando assim o que é chamado
de espaço nocivo ou clearance volume”.
7
PRH-ANP 16
RELATORIO FINAL
A eficiência adiabática para este tipo de compressor é tomada como
100%, porém a sua eficiência mecânica é baixa quando comparada com os
compressores centrífugos, por possuírem mais partes móveis. Sua eficiência
geral varia exponencialmente de acordo com a razão de compressão
empregada, de modo que é possível perceber tal fato através da função entre
razão de compressão e fator de perdas (perdas devido a perdas de carga
localizada nas válvulas e atrito do pistão e câmara) para compressores
alternativos apresentada como gráfico ilustrado na Fig. 4:
Figura 4: Fator de perdas X razão de compressão-compressores alternativos
A formula 1.9 permite calcular o valor de potência teórico para uma certa
diferença de pressão e volume, sendo dada por:
k −1
P1V1
k P2 k
− 1
HPteórico =
.
229 (k − 1) P1
(1.9)
sendo que Hp efetivo = Hp teórico X fator de perdas.
1.3.2.1- Efeito simples
Neste tipo de máquina, a compressão de dá apenas de um lado do
pistão, o que resulta em somente uma compressão para cada rotação do eixo.
8
PRH-ANP 16
RELATORIO FINAL
1.3.2.2- Duplo efeito
Existe uma câmara de compressão em cada lado do pistão, assim
resultando em duas compressões para cada rotação do eixo. Existe uma haste
deslizante em uma graxeta vedada, que estando na parte do cilindro posterior ao
pistão acaba por realizar a articulação do mesmo [3].
1.3.3- Compressores Dinâmicos
São máquinas rotativas geradoras que tem como objetivo aumentar a
energia utilizável de fluídos elásticos pelo aumento de sua pressão dinâmica.A
forma de aquisição de energia cinética pelo fluído classifica os compressores
deste tipo em axiais ou centrífugos.
1.3.3.1- Centrífugos (Fluxo radial)
Neste tipo de compressor, o aumento de pressão se dá pela ação de um
rotor provido de pás que faz com que gás seja impulsionado através de um
impelidor atingindo velocidade elevada sendo posteriormente descarregado em
um difusor formado por um caixa em forma de voluta ou por canais difusores.
Ambos tem como objetivo fazer com que o gás perca velocidade. Desta forma, a
energia cinética oferecida ao gás pelo rotor é praticamente toda revertida em
pressão para o fluído.
Podem ser classificados em ventiladores centrífugos, compressores
centrífugos, turboventiladores e turbocompressores.
Ventiladores centrífugos: são compostos por apenas um estágio de
compressão e devido a exatamente este fato são destinados a produzirem
diferenças de pressões pequenas, inferiores a 700 Kgf/m2 (1 psi). De tal maneira
não são geralmente aplicados a industria de transporte de gás natural.
Compressores centrífugos básicos: são também de rotor único, ou
seja, proporcionam apenas um estágio de compressão a exemplo dos
9
PRH-ANP 16
RELATORIO FINAL
ventiladores. Porém, devido à seus aspectos construtivos tal máquina é aplicada
para gerar diferenças de pressões da ordem de 3500 Kgf/m2 (4,98 psi). A Fig. 5
ilustra sua estrutura básica.
Figura 5: Construção básica de um compressor centrifugo [1]
Turboventiladores: possuem vários estágios de compressão, porém
mesmo desta forma não permitem diferenças de pressão muito elevadas.
Turbocompressores: são os tipos de máquinas mais utilizadas em
gasodutos de grande porte. Isso se dá por sua capacidade de gerar altas
diferenças de pressão (bem acima de 10 Kgf/cm2), e justifica a utilização de
refrigeração intermediária. Tal tipo de máquina é de difícil construção e exige
acabamento mecânico com precisão o que encarece bastante seu custo final.
Estes tipos de compressores apresentam geralmente baixo
consumo de óleo lubrificante e custo de manutenção baixo devido a poucas
partes móveis (impelidor e eixo). Não alcançam taxas de compressão altas como
as unidades alternativas, porém propiciam uma entrega contínua de fluído sem
variações no ciclo.
A pressão de descarga varia sensivelmente com pequenas variações na
velocidade de rotação, e devido a isso os acionadores designados para operar
10
PRH-ANP 16
RELATORIO FINAL
com este tipo de compressor devem operar com variações de velocidade angular
de 5%.
Os três itens de maior importância para a definição de um compressor
centrífugo em uma linha de transporte de gás natural trabalhando com uma
determinada pressão de descarga e capacidade são: potência do eixo,
temperatura de descarga e velocidade de operação. Para determinar estes
valores inicialmente deve-se calcular o head (trabalho por unidade de massa
comprimida) que é dado por:
Hth = 144 ∫ Vdp
(1.10)
Porém, como para um compressor centrífugo o volume específico é uma
variável. Portando assumindo um processo de compressão ideal politrópico, cujo
o head é:
P
n
Hp =
ZRT1 2
P1
n −1
n −1
n
− 1
(1.11)
O rendimento termodinâmico associado ao processo politrópico resulta da
divisão do head ideal pelo real da forma mostrada abaixo:
ηp =
Hp
H (1.12)
Sendo que o head real pode ser calculado por:
H=
Rk
(T2 − T1 )
k −1
(1.13)
A partir disso, podemos calcular a potencia requerida para compressão do
gás usando 1.13:
11
PRH-ANP 16
RELATORIO FINAL
Pex =
WH
33000e0 (1.13)
A potencia no eixo é dada dividindo este resultado pela eficiência
mecânica [1].
A temperatura de saída pode ser dada utilizando esta relação
fundamental da termodinâmica:
P
T2 = T1 2
P1
k −1
k
(1.14)
A definição da rotação pode ser realizada utilizando o diâmetro do
impelidor e coeficiente de pressão. A expressão é a mostrada a seguir:
N=
1300
Di
H'
µ
(1.15)
µ = 0,55 – Valor médio para um estágio de um turbocompressor tipo Clark.
O compressor centrífugo não pode atuar abaixo de uma capacidade
mínima, pois a partir deste ponto este entra em instabilidade que vem
acompanhado de um ruído denominado surge ou pumping. Tal limite está
intimamente ligado pelo ângulo de descarga do impelidor, sendo na média das
máquinas este ponto se dá em 50% do ponto de maior eficiência.
Existe um outro fenômeno limitante denominado stall ou limite de
stonewall, que se resume quando a velocidade do gás do impelidor no 1º estágio
(ou outro) chega próxima a velocidade do som. Tal fato gera ondas de choque
que efetuam um processo de blocagem na máquina.
12
PRH-ANP 16
RELATORIO FINAL
1.3.3.2- Axiais
São
compressores
que
tem
como
princípio
de
funcionamento
proporcionar a aceleração axial do fluído, ou seja, uma aceleração paralela ao
eixo rotativo da máquina para que depois tal energia seja convertida em pressão.
Estes tipos de compressores são menos utilizáveis na indústria de transporte de
gás
natural,
porém
podem
ser
utilizados
em
algumas
aplicações
específicas.Existem três classes de compressores axiais: os ventiladores
helicoidais, ventiladores turbo-axiais e turbocompressores axiais.
Os primeiros são os mais simples, dotados apenas de uma hélice e que
tem aplicabilidade somente para movimentação de ar ambiente e não são
utilizados para compressão de gás. Os ventiladores turbo-axiais são como os
ventiladores helicoidais, porém possuem uma carcaça que permite canalizar o
fluído na entrada e na saída do rotor. São utilizáveis para baixas pressões e
grandes vazões.
Os turbocompressores axiais são os que são realmente aplicáveis ao
transporte de gás, por sua vez também trabalham como ventiladores, mas são
bem mais eficazes devido a seu aspecto construtivo que integraliza em um só
elemento vários estágios de compressão. Cada estágio possui pás fixas e
móveis que formam um conjunto difusor-distribuidor. São aparelhos de dimensão
bem menores que um compressor centrífugo apesar de não possuírem a mesma
capacidade de compressão por estágio [3].
1.4- MÁQUINAS PRIMÁRIAS (PRIME MOVERS)
São máquinas que transformam algum tipo de energia em energia
mecânica e tem como objetivo gerar a potência necessária para a compressão
do Gás Natural. A escolha de um tipo de gerador utilizado em um sistema
depende intimamente das características do tipo de compressor empregado.
13
PRH-ANP 16
RELATORIO FINAL
1.4.1- MOTORES ELÉTRICOS
Motores elétricos de grande porte são amplamente utilizados. Demandam
baixa manutenção além de possibilitar um controle automático diminuindo os
custos gerais.
O compressor vem tomando espaço no cenário da industria de transporte
de gás natural nos últimos 10 anos, por sua eficiência. A grande limitação deste
tipo de máquina era a velocidade. Para países que utilizam linhas elétricas de
60Hz, o limite teórico de velocidade era de 3600 RPM na utilização de motores
síncronos e um pouco menos na utilização de MIT´s (motores de indução
trifásicos), a menos que fosse utilizado um sistema de transmissão com
engrenagens, o que encarecia muito o custo final. Por esta limitação, tal tipo de
máquina não era costumeiramente utilizado junto com compressores centrífugos,
já que necessitam de altas rotações. A rotação síncrona de um motor é dada por:
N=
60 f
P (1.16)
O desenvolvimento no controle de velocidade de motores indutivos
possibilitou a conexão de motores diretamente a compressores centrífugos
através de inversores de freqüência e acoplamentos hidráulicos, já que permitem
uma variação de velocidade adequada [12]. Tal equipamento ainda possui custo
bastante elevado, pois devem permitir a variação de freqüência em alta potencia.
Uma tendência aponta que estes equipamentos sejam barateados no futuro.
Outro fator importante é a disponibilidade de rede elétrica de grande porte
próximo a estação de compressão.
Desta forma, os motores elétricos representam uma alternativa promissora
para o futuro da compressão para transporte de gás natural por dutos.
14
PRH-ANP 16
RELATORIO FINAL
1.4.2- TURBINAS A VAPOR
Tal tipo de máquina possui uma peculiaridade interessante que é o fato de
possibilitar o consumo de qualquer combustível sendo ele sólido, líquido ou
gasoso. Podendo ser utilizado o que for mais economicamente viável na área, o
que não é uma vantagem quando analisamos transporte de gás natural, pois
este é a fonte mais viável de energia.
Pode ser acoplado a compressores centrífugos por permitir alta
velocidade de rotação, mas seus custos com manutenção e consumo são
elevados.
1.4.3- TURBINAS A GÁS
São equipamentos rotativos que tem como objetivo transformar energia
química da combustão de combustíveis gasosos em energia mecânica. Possui
uma série de dispositivos que em conjunto possibilitam a compressão de ar
como comburente da reação, mesclando este com o fluído combustível (próprio
gás natural). Queima a mistura através de uma parte ignitora e captação da
energia através da turbina de potência, transferindo a um eixo rotativo
posteriormente acoplado ao compressor (Fig. 6).
Figura 6: Esquema funcional de uma turbina á gás.
Portanto podemos salientar quatro componentes mais importantes no
processo construtivo de uma turbina a gás [6]:
15
PRH-ANP 16
RELATORIO FINAL
O Compressor de ar trabalha para garantir alta razão de compressão
para o ar (12:1), fazendo assim com que a queima libere maior energia, podendo
ser axial ou centrífugo.
O
regenerador
funciona
de
maneira
a
aproveitar
melhor
termodinamicamente os recursos, transformando parte do calor do gás de saída
para o ar de entrada, podendo em alguns casos gerar uma redução do consumo
na faixa de 30%.
Os combustores são responsáveis pela elevação da temperatura e
combustão da mistura, fornecendo o residual para a turbina.
A turbina de potência é responsável pela transformação efetiva da energia
obtida em energia mecânica. Existem as turbinas de fluxo axial e as turbinas de
influxo-radial com diferentes princípios de funcionamento, porém em 80% das
aplicações a utilização é de fluxo axial.
Existe também uma outra turbina, a de alta pressão que geralmente são
acopladas ao compressor de ar, com o objetivo de se melhorar a eficácia da
expansão.
As turbinas a gás podem ser classificadas segundo vários critérios:
Podem possuir um ou dois eixos, uma vez que as turbinas com um eixo
geralmente são utilizadas para movimentação de geradores e as com dois eixos
para acionamento mecânico geral, podendo assim atuar-se tanto no eixo do
compressor quanto no eixo principal de fornecimento.
Referente aos aspectos construtivos elas podem ser aeroderivativas, que
possuem no seu projeto considerações principalmente a respeito da otimização
dos fatores tamanho e peso, ou podem ser industriais, que priorizam neste caso
a sua eficácia e resistência no ambiente de trabalho.
Quanto à eficiência termodinâmica, já que esta pode trabalhar em ciclo
simples (sem regenerador) onde os gases são exauridos na atmosfera. Ou com
16
PRH-ANP 16
RELATORIO FINAL
ciclo regenerativo (com regenerador), onde o calor dos gases da saída aquece o
ar de entrada e em ciclo combinado, onde o calor da exaustão é utilizado para
acionar uma turbina a vapor, gerando uma maior eficiência termodinâmica ao
processo.
O consumo de uma turbina a gás é relativamente alto, porém como o gás
natural é um combustível extremamente energético o custo é reduzido. Para um
ciclo regenerativo, a eficiência térmica máxima é da ordem de 27,5%.
1.5- VÁLVULAS
Em toda a totalidade da linha de transmissão de gás natural será
encontrada uma vasta gama de válvulas realizando os mais diversos tipos de
funções, mas todas elas têm em comum a intervenção junto ao fluxo de gás. São
acopladas junto aos atuadores, que podem ser acionados eletricamente,
pneumaticamente ou hidraulicamente, por meio de um sistema de controle a
distancia ou próximo ao próprio processo. As válvulas utilizadas em um gasoduto
são robustas e feitas de materiais que apresentam resistência mecânica elevada
(normalmente aço carbono, ferro fundido ou bronze) de modo a permitir sua
aplicação em altas pressões, necessitando também uma resistência à corrosão e
temperatura. Basicamente seguem um dos quatro métodos de funcionamento de
válvulas [7]:
Tipo Borboleta: É constituída por um disco de mesmo diâmetro o qual
pode ser rotacionado por volta da lentilha dentro da tubulação, limitando a área
livre e assim permitindo uma maior ou menor passagem de fluxo. Proporciona
uma alta perda de carga, pois gera turbulência no fluído.
Tipo globo e de agulha: Baseia-se no lançamento de um disco contra uma
abertura para bloquear o fluxo. A válvula agulha normalmente é utilizada para
controles muito finos de vazão.
17
PRH-ANP 16
RELATORIO FINAL
Tipo diafragma: Tal válvula consiste em um corpo cilíndrico no qual na
parte superior existe uma membrana plástica interna que é movimentada
perpendicularmente na direção do fluxo por um pistão controlado externamente.
Normalmente existe um canal elevado na parte central da válvula por onde o
fluxo escoa, e ali é que a membrana interrompe o fluxo, porém existem
dispositivos também com a passagem reta.
Tipo esférica e gaveta: Possui uma esfera com um furo ou cunha que ao
deslizar por uma abertura proporciona o estrangulamento ou abertura do fluxo,
sendo este deslizamento externamente controlado. São utilizadas geralmente
para o controle ON-OFF.
Um importante parâmetro das válvulas reguladoras é a característica de
fluxo, que consiste na relação do fluxo passante pela válvula e sua porcentagem
de fechamento. Isso se dá de acordo com a forma de estrangulamento do fluxo.
A Fig. 7 mostra alguns tipos de estrangulamento de fluxo.
Figura 7: Formas de estrangulamento de fluxo pelas válvulas
A cada válvula com um tipo de estrangulamento diferente segue uma
curva de fluxo por abertura. Uma válvula com estrangulamento tipo b acima
possui uma curva linear de abertura x vazão.
As válvulas de controle industrial são geralmente dotadas de atuadores.
Estes dispositivos integrantes das válvulas são responsáveis por fornecer a força
necessária para que a válvula se movimente de maneira adequada a atuar no
sistema. Os atuadores podem ser das seguintes naturezas
18
PRH-ANP 16
RELATORIO FINAL
:
o Pneumáticos;
o Elétricos;
o Hidráulicos;
o Mecânicos;
A maioria dos atuadores utilizados em válvulas de controle são
pneumáticos. Dentre estes se destacam os do tipo diafragma, pinhão e pistão.
Neste tipo de atuador o sinal de controle é um sinal pneumático (ar ou outro gás)
que fornece o comando para o fechamento da válvula.
Os atuadores elétricos são de maneira geral um sistema de motoredução
acoplados a haste da válvula de forma a possibilitar o acionamento. A maior
vantagem deste tipo de atuador é o fato de ser acionado eletricamente,
minimizando o efeito da distância do elemento que gera o sinal ao sistema.
Os atuadores hidráulicos são conjuntos que necessitam de reservatórios
de óleo, válvulas e bombas para efetuar o acionamento da válvula principal. Por
depender de uma gama muito grande de equipamentos não são muito utilizadas.
Os atuadores mecânicos são compostos por um dispositivo que possibilita
a movimentação de uma haste acionando a válvula. São pouquíssimos utilizados
e somente em aplicações que exijam pouco torque devido suas perdas
mecânicas.
Outros dispositivos importantes que podem vir incorporados a algumas
válvulas são os posicionadores. Estes dispositivos são controladores que
funcionam com sinais de controle pneumáticos ou eletro-eletrônicos e tem como
função manter uma relação entre haste o eixo e o sinal aplicado. Desta forma
são atribuídas as mesmas características de um controlador que influência
diretamente na dinâmica do sistema como o ganho, tempo morto entre outros.
De maneira geral, estes dispositivos são dotados de um ajuste de ganho de
modo a propiciar uma adequação ao sistema controlado. Em gasodutos por ser
um processo rápido, este ajuste deve estar próximo ao mínimo e o ajuste da
19
PRH-ANP 16
RELATORIO FINAL
velocidade do ar de saída deve estar no máximo, de modo a permitir uma
resposta correta.
Os posicionadores são classificados quanto ao tipo de atuador utilizado.
Podem ser rotativos (válvula esfera, borboleta) ou lineares (válvulas globo e
gaveta).
Atualmente existem posicionadores que funcionam com protocolos
digitais, inclusive integrados a redes Fieldbus.
Quando
as
válvulas
são
dotadas
de
posicionadores
acionados
eletricamente são chamadas de válvula proporcionais. A abertura deste tipo de
válvula depende do nível de tensão aplicado em sua entrada, desta forma
podendo-se controlar a vazão através da aplicação de um sinal de tensão. Este
tipo de válvula possui grande aplicação em gasodutos.
Tais válvulas são combinadas dentro do sistema a fim de realizar
determinadas funções pelas quais são classificadas.
1.5.1- VÁLVULAS DE BLOQUEIO
São equipamentos que permitem o corte no fluxo de gás e assim
possibilitando o isolamento de parte da linha para manutenção ou emergência.
Provida de atuadores pneumáticos utilizam o próprio gás natural para propiciar o
acionamento além de possuírem também dispositivo de proteção de rápida
atuação no sistema para bloquear o fluxo no caso de mau funcionamento, como
falha de controle, excesso de pressão ou vazão (vazamentos, fogo, falha nos
controladores etc). São válvulas que possuem principio de funcionamento ONOFF.
Possuem sistema de monitoramento de posição, que indica se está aberta
ou fechada e transmite esta informação de maneira que isto possa ser
monitorado em uma estação central.
20
PRH-ANP 16
RELATORIO FINAL
1.5.2 - VÁLVULAS DE ALÍVIO DE PRESSÃO
A ação desta válvula trabalha para prevenir sobrepressões no sistema,
atuando
automaticamente
quando
um
limite
de
pressão
previamente
estabelecido é transposto. Normalmente são utilizados em conjunto com as
válvulas de bloqueio automático, aliviando o gradiente de pressão formado no
acionamento desta.
1.5.3 - VÁLVULAS REGULADORA DE PRESSÃO
É uma válvula tipo diafragma que tende a manter os níveis de pressão
em um valor que permita a transferência. É utilizada principalmente nas estações
de entrega e assim mantém a pressão do duto em níveis aceitáveis para os
sistemas de consumo.
1.6- MEDIDORES
A medição confiável das variáveis pressão e vazão são imprescindíveis
para garantir o bom funcionamento do duto, manter a segurança e garantir o
faturamento. Para realizá-la existe uma enorme quantidade de equipamentos, os
quais serão citados os mais importantes.
De maneira geral funcionam como transdutores convertendo o valor de
grandeza física em um sinal elétrico de corrente analógico padrão de 4 a 20 mA.
Ou outro qualquer que permita a comunicação com a porta de entrada analógica
de controladores programáveis, e com uma série de instrumentos possibilitando
um monitoramento a distância.
1.6.1- PRESSÃO
A medição de pressão ocorre sempre de maneira comparativa,
diferenciando-se apenas pela referência em questão. A medição da pressão
21
PRH-ANP 16
RELATORIO FINAL
absoluta do gás se dá pela soma da pressão barométrica mais a pressão
manométrica do gás.
De maneira geral, são utilizados manômetros de precisão e transmissores
de pressão, como os sensores capacitivos ou piezelétricos.
1.6.1.1- MANÔMETROS
Podem ser utilizados inúmeros tipos de manômetro na medição de
pressão:
Manômetro de coluna: É constituído por um tubo com uma escala
graduada e diâmetro constante onde fica uma quantidade pré-estabelecida de
fluido incompressível no qual a força é aplicada, e assim a indicação na escala
do valor de pressão é efetuada. Pode ser feita uma configuração com Ponte de
Wheatstone de modo a fornecer um sinal analógico referente à medida efetuada.
Manômetro Bourdon: Consiste em um tubo em configuração elíptica no
qual uma ponta é livre e a outra fixa. Quando é aplicada a pressão, existe uma
tendência de o tubo se tornar circular, assim gerando um deslocamento que
pode ser medido.
Para transferência da pressão em uma determinada região interna do
duto (normalmente central) são utilizados tubos de Pitot, que são sondas
compostas simplesmente por um tubo que fica alinhado com o fluxo de modo
transferir a pressão existente para uma parte externa, e assim realizar a medição
por um manômetro. No tubo de Pitot simples a pressão medida é a soma da
pressão estática e pressão dinâmica. Utilizando-se o tubo de Pitot estático ou
tubo de Prandtl é possível a medição de somente a pressão dinâmica, pois
existe um outro tubo que permite que a leitura já esteja sem a pressão estática.
Para realizar uma medida media de pressão em uma tubulação pode-se
efetuar uma tomada em anel.
22
PRH-ANP 16
RELATORIO FINAL
1.6.1.2- STRAIN GAUGES
São pequenas células de silício que possuem resistência elétrica variável
de acordo com o nível de esforço mecânico ao qual é submetido. Normalmente
são montados e uma membrana que é submetida ao nível de pressão que
deseja ser medido. Assim, os sensores podem ser utilizados em uma
configuração ponte de Wheatstone na qual a resistência dos quatro elementos
varia com a pressão, fornecendo então um sinal de tensão correspondente à
medida de pressão.
1.6.1.3- MEDIDOR DIFERENCIAL CAPACITIVO
Consiste em um dispositivo com duas membranas nas quais as pressões
serão aplicadas. É provido de dutos que transferem as grandezas até seu interior
por meio de um óleo viscoso, onde as placas metálicas são encontradas. A
diferença entre as duas faz com que a placa metálica móvel central se envergue
para um dos lados diminuindo a distância para uma das placas e aumentando
para a outra e desta forma mudando a relação:
C = ε.
Ac
dc
(1.17)
Desta forma existe uma variação do valor da capacitância entre as placas,
para uma determinada diferença de pressão, que coletada e tratada por um
circuito indica o valor diferencial. São sensores normalmente muito precisos.
1.6.2- VAZÃO
Existem os mais variados tipos de sensores de vazão: Venturis,
Placas de Orifício, Turbinas, ultra-som, hélices etc. A maioria dos medidores
utiliza os princípios de medição da velocidade do fluido ou da variação de
energia cinética.
23
PRH-ANP 16
RELATORIO FINAL
Todos os tipos de medidores de vazão devem ser instalados em trecho
reto de tubulação, e em caso de medição para faturamento, deve ser respeitada
uma distância de 120 diâmetros de qualquer singularidade.
1.6.2.1- TIPO PLACA DE ORIFÍCIO
Consiste em uma placa com uma passagem circular no meio que é
colocada de modo a promover o estrangulamento do fluxo, alterando assim o
perfil de velocidade do escoamento.Seu principio de funcionamento é similar ao
medidor venturi, porém necessita de um acabamento de usinagem não tão
perfeita, além de gerar uma menor perda de carga. Para o calculo da vazão é
necessário o monitoramento da diferença pressão no medidor, que é feita
geralmente um pol. a esquerda e a direita da placa.
De tal forma modelando o problema partindo da equação de Bernoulli
para fluídos tem-se que:
Q = C1 ∆P (1.18)
onde C1 é comumente é obtido através de calibração do equipamento, mas
pode ser obtido também de maneira teórica.
1.6.2.2- TIPO ULTRASOM
Tal dispositivo utiliza o conceito de físico de propagação de ondas em um
meio para determinar a vazão. Existem duas classificações possíveis para
sensores deste tipo [7]:
Efeito Doppler: Baseiam-se no principio Doppler da variação da
freqüência de ondas entre células emissoras e receptoras estando em
movimento relativo. A faixa de freqüência utilizada é de 150Khz à 5Mhz, porém
para ser utilizado o fluido deve possuir uma quantidade de partículas em
suspensão maior que 1% e menor que 10%.
24
PRH-ANP 16
RELATORIO FINAL
Emissor e receptor ficam instalados externamente alinhados nas laterais da
tubulação, sendo assim realizada a emissão do sinal e captação devido a
reflexão nas partículas em suspensão do fluído sendo medida, portanto a
freqüência de chegada. De tal forma é possível calcular a vazão utilizando 1.19:
Q=
π .D 2 vs ∆f
.
4 cosθ f 0
(1.19)
Tempo de trânsito: Este tipo de medidor possui uma abordagem
diferente do efeito Doppler, pois a vazão neste caso é medida através da
detecção do tempo em que a onda emitida demora para chegar ao receptor
passando
pelo
escoamento.
Neste
caso
os
sensores
são
conjuntos
emissores/receptores colocados sobre a tubulação com uma certa distância préestabelecida que emitem e recebem sinais calculando o tempo de chegada (a
onda caminha contra e a favor do escoamento). Este tipo é aplicável para
medição de fluidos limpos com nível de partículas em suspensão menor que 3%,
e portanto é mais aplicável para medição de gás natural. Assim, a velocidade
média pode ser calculada por:
Vm =
∆T Ls
Tm2 2 cosθ (1.20)
Podem ser instalados aproveitando as configurações Z, V e W de acordo
com o diâmetro do duto para permitir maior exatidão. Em dutos de grandes
diâmetros a configuração z é mais adequada devido ao problema de atenuação
de sinal, enquanto nos tubos de diâmetros menores, são utilizadas as
configurações W e V para aumentar a exatidão do instrumento.
25
PRH-ANP 16
RELATORIO FINAL
1.7- CONSIDERAÇÕES
Este capítulo mostrou uma visão geral de uma linha de transporte de Gás
Natural e seus principais componentes, bem como apresentou as fórmulas que
modelam seu funcionamento.
Estas informações são importantes, pois é através da análise da estrutura de
funcionamento e do modelamento de tais equipamentos é que se torna possível
à implementação de sistemas de controle e supervisão, além de softwares que
possibilitam a simulação computacional destes processos.
26
PRH-ANP 16
RELATORIO FINAL
CAPITULO II
CONTROLE DE FLUXO E PRESSÃO EM GASODUTOS
2.1-) INTRODUÇÃO
O controle das características de pressão e vazão de uma linha de
gasoduto é uma tarefa que exige um complexo sistema de aquisição e
monitoramento dos dados, efetuando medições de uma gama de variáveis,
analises e atuações automáticas nos atuadores e máquinas primarias da rede.
O bom funcionamento de uma malha de dutos de transporte de gás
natural exige o conhecimento detalhado dos seus componentes. São
necessárias estratégias de operação e controle que permitem que o sistema não
entre em situação de insegurança que possa vir a causar um colapso na rede.
Desta maneira, os estudos das características do sistema e dos seus fenômenos
correlacionados, são de fundamental importância, tanto para definição de uma
estratégia de controle que possibilite um bom desempenho, quanto para a
construção de modelos que permitam representá-lo adequadamente em análises
diversas.
Neste capitulo a abordagem será especifica para o sistema de controle de
uma linha de transporte de gás como um todo, utilizando para isso estruturas
consolidadas em sistemas atuais, mostrando os princípios de funcionamento
dinâmico das estações e os componentes que compõem a malha. Para tanto,
serão necessários conceitos de engenharia de controle moderno e também de
conceitos sobre termodinâmica.
Além do funcionamento normal, serão abordadas situações de falhas de
um gasoduto, como por exemplo, situações de vazamentos e as medidas que
possibilitam a correção e/ou compensação de falhas.
As conceituações serão focadas em uma linha que utiliza compressores
centrífugos e com acionadores por turbinas á gás.
27
PRH-ANP 16
RELATORIO FINAL
2.2-) ESTRUTURA DO SISTEMA
Por toda a linha existem estações que realizam as funções necessárias para o
transporte, integrando a ação dos componentes vistos no capitulo anterior.
Existem basicamente três tipos de estações:
Estação de compressão: Provida de compressores, acionadores e
válvulas que compensam as perdas cargas do gás promovendo o aumento da
pressão do fluido.
Estação de entrega: Permite a entrega ao consumo do gás transportado.
É dotada de válvulas que permitem a redução de pressão a níveis específicos de
operação.
Estação de Medição: Possuem medidores que medem os valores das
variáveis para análises e cálculos diversos.
Cada tipo de estação possui um modo de atuação dentro do sistema.
Desta forma, a análise deve ser focada em cada tipo de estação, além de alguns
dispositivos isolados.
2.2.1- ESTAÇÃO DE COMPRESSÂO
A estação de compressão é responsável pela manutenção da pressão
na linha atuando de modo a fornecer energia na forma de pressão dinâmica ao
fluído. O controle de pressão é responsável pelas características de fluxo do
produto.
Um gasoduto geralmente opera com diversas faixas de regime de
trabalho, devendo o sistema de controle possuir uma grande flexibilidade. Os
fenômenos físicos e dinâmicos com influência nas variáveis pressão e vazão que
mais ocorrem no sistema são:
28
PRH-ANP 16
RELATORIO FINAL
-
Variação da vazão devido a uma variação do consumo (suprimento);
-
Variação de temperatura;
-
Variação dos perfis de escoamento;
-
Variação das características intrínsecas do gás natural;
Em uma estação de compressão as ações dinâmicas são rápidas, e
desta forma os recursos de controle automático são utilizados para minimizar os
efeitos das mesmas, que poderiam levar o sistema a uma condição de
inoperabilidade.
Portanto,
cada
máquina
em
uma
estação
de
compressão,
independentemente da configuração em que se encontram (série ou paralelo),
possuem um conjunto de instrumentos que proporcionam o controle de
capacidade, de forma a manter uma determinada variável operando dentro de
certa faixa de atuação. Em quase a totalidade dos casos, as variáveis
controladas são:
o Pressão de sucção
o Pressão de descarga
o Vazão
Para o controle da pressão de sucção faz-se uma atuação na vazão
mássica do compressor de forma a que esta se iguale a vazão mássica de
suprimento, ou seja, toda a vazão a montante é comprimida e entregue a
jusante.
Adotando o controle da pressão de descarga, a atuação é feita no
sentido de se igualar à vazão mássica do compressor à vazão mássica de
descarga, com adequação da pressão de sucção ao processo.
No controle de vazão mássica, a atuação do controlador ocorre sobre o
compressor, de modo a estabilizar o sistema em caso de alterações a jusante e
montante da máquina que inferem nas variáveis controladas.
29
PRH-ANP 16
RELATORIO FINAL
No caso de compressores centrífugos, são utilizados os seguintes
métodos para o controle de capacidade:
-
Variação de rotação;
-
Estrangulamento de sucção através de válvulas controladas;
-
Variação do ângulo das pás impelidoras;
Fonte: [4]
Pelo fato dos compressores centrífugos possuírem intrinsecamente em
suas curvas de head-vazão uma pequena inclinação, uma grande sensibilidade
da vazão pela variação de rotação ocorre neste tipo de máquina.
Devido a esta característica, a variação na velocidade de rotação do
compressor é utilizada como meio de compensação das alterações de uma
determinada variável de processo, de maneira que fique constante.
O controle através de estrangulamento da sucção consiste na instalação
de uma válvula que estrangula o fluxo de modo a gerar uma perda de carga na
tubulação de sucção do compressor. É gerada assim, uma diferença de pressão
entre a sucção do sistema e a entrada da máquina de compressão, que depende
exclusivamente da posição de abertura da válvula.
A variação do ponto de trabalho na curva head-vazão relacionado com a
abertura da válvula de estrangulamento se dá de acordo com o gráfico a seguir:
Figura 8: Curva Head-Vazão.
30
PRH-ANP 16
RELATORIO FINAL
O controle através de mudança do ângulo de pás guias consiste na
atuação em um componente interno do compressor centrifugo provido de pás
com ângulos controláveis de orientação, geralmente instalado no primeiro
estágio. Isto proporciona uma rotação inicial do escoamento de forma com que a
entrada de gás não seja puramente radial. De acordo com as características
desta rotação, ocorrerá mais ou menos transferência de energia para o gás.
De maneira geral, a técnica de variação de rotação é mais utilizada. A
técnica de estrangulamento de sucção na maioria dos casos é utilizada somente
em caso quando a variação da rotação é impossível ou muito difícil, pois
energeticamente ela não é interessante pelo fato de inserir uma perda de carga
no sistema. A técnica de variação do ângulo das pás guias também não é muito
utilizada por esta razão, além de necessitar equipamentos especiais.
Um modelo bastante simples, mas que permite uma análise sobre a
atuação do controle de capacidade em termos de head termodinâmico e vazão
volumétrica de sucção e rotação é:
H th = A.N 2 + B.N .V1 + C.V12 (2.1)
Onde A, B e C são constantes. Este modelo constitui uma família de
parábolas na curva de vazão volumétrica por head termodinâmico.
Não menos importante do que o controle de capacidade torna-se
necessário à existência de um controle anti-surge, de modo a fazer com que o
sistema não entre em uma condição de inoperabilidade devido a uma diminuição
da vazão.
O sistema de controle anti-surge utiliza um sistema de circulação
paralelo ao compressor composto de uma válvula com atuador controlado
automaticamente. Assim, a vazão excedente da saída recircula para a entrada,
fazendo o compressor trabalhar próximo ao limite de estabilidade, mas em
condições aceitáveis.
31
PRH-ANP 16
RELATORIO FINAL
Tomando o sistema isolado, ou seja, sem considerar a existência de um
controle de capacidade, o limite de surge seria dado por somente um ponto de
operação, e o set-point do controle atua próximo a este ponto respeitando uma
margem de segurança. O controlador anti-surge baseia-se então em uma
medição de erro:
E = VC − SP ( 2.2 )
Sendo que sempre que o erro possui um valor positivo a válvula deve se
encontrar na posição fechada.
Porém, colocando em conjunto com o controle anti-surge um controle de
capacidade como o de variação de rotação, possuímos devido à existência de
varias curvas head-vazão, vários pontos operacionais se estabelecem, portanto
uma curva limite de surge é definida de acordo com a figura 9:
Figura 9: Limite de surge
Os controladores utilizados para o controle de capacidade e anti-surge
devem possuir as ações proporcional e integral. A ação integral é indispensável,
pois atua aproximando o ponto de operação do set-point, não deixando que se
32
PRH-ANP 16
RELATORIO FINAL
aproxime do limite de surge no controle de surge, e aproximando do valor
desejado no caso do controle de capacidade.
Basicamente o limite de surge varia (mesmo que pouco), com a
compressibilidade do gás que passa pelo compressor, que pode ser modificada
por uma mudança na temperatura de sucção ou mudança no peso molecular
intrínseco do gás natural. Para definição do limite anti-surge em um único ponto,
é necessário a consideração desta variável em seu grau mais desfavorável, ou
seja, com a máxima compressibilidade. De maneira bastante simplificada,
podemos definir a curva de surge como uma parábola:
H p = α1.V 12
(2.3)
A única forma de se estabelecer de maneira precisa o limite de surge é a
efetuação de teste nas instalações definitivas do sistema. Torna-se necessário à
realização de um estudo sobre como o controle de capacidade e o controle antisurge interagem entre si. Basicamente, a análise feita com relação a condições
de regime permanente denomina-se interação estática e em regimes transitórios
denomina-se interação dinâmica.
Em sistemas bem ajustados de controle, com variações pequenas no
processo e atuando em regime permanente, a interação estática entre os
controles de capacidade e anti-surge pode ser utilizada como modo de
representação. Para tal sistema de análise considera-se que as variáveis
estejam fixas em seus respectivos set-points.
As perturbações basicamente podem ser de dois tipos:
-
Variações da perda de carga do sistema pós-compressor;
-
Variações de suprimento;
33
PRH-ANP 16
RELATORIO FINAL
Mantida a vazão de suprimento e a pressão de sucção como constantes
supondo um aumento da pressão de descarga, a tendência é o controle de
capacidade atuar de forma a manter a vazão constante, até que o sistema esteja
próximo do surge. Assim o sistema passa a operar acompanhando a linha limite
de surge. A figura a seguir mostra a pressão de descarga em função da vazão
mássica neste caso, considerando um controle de capacidade baseado na
variação da rotação.
Figura 10: Deslocamento do set-point por aumento da perda de carga pós-compressor [4]
No caso de existir uma queda no suprimento, o controle de capacidade
atua para se adequar à vazão exigida pelo sistema e a válvula de reciclo atua
para que o limite de surge não seja ultrapassado.
A interação dinâmica ocorre quando são efetuadas manobras no
sistema, sendo que a simulação dinâmica se torna indispensável para ser
possível determinar as condições do sistema após distúrbio. De maneira geral,
devido à interação entre os controladores, estes podem se tornar mais lentos ou
mais rápidos, podendo permitir grandes desvios das variáveis com relação aos
set-points ou mesmo ocasionando instabilidade.
34
PRH-ANP 16
RELATORIO FINAL
A interação entre os controles pode ser:
Positiva: A ação do controle de capacidade é adjacente a do controle
anti-surge.
Negativa: A ação do controle de capacidade é oposta a do controle antisurge;
O diagrama P&ID (Pipes&Instrumentation devices) hidráulico de uma
estação de compressão de um gasoduto real é representado pela figura abaixo.
Figura 11: Diagrama de fluxo interno de uma estação de compressão
FONTE: Folder TBG
Analisando o circuito hidráulico, percebemos logo que os compressores
estão dispostos em paralelo, o que permite parar ou partir máquinas de acordo
com a vazão demandada pelo sistema, ou também controlar uma variável do
sistema através da modulação da capacidade das máquinas. A estação em
análise possui dois compressores nesta configuração com um terceiro em standby. Este número pode ser maior em outras aplicações, dependendo
exclusivamente da topologia da estação de compressão.
35
PRH-ANP 16
RELATORIO FINAL
Este tipo de operação requer um sistema de controle fino e bem
ajustado, de maneira a permitir a partida e a parada de uma das máquinas com a
outra em funcionamento e da mesma forma para evitar a sobrecarga de uma das
máquinas na operação. De maneira geral, é definido um método de divisão de
carga, que pose ser utilizando um controlador principal fornecendo o set-point
para outros dois controladores secundários com ação integral, cada um
conectado a um dos compressores.
No caso é possível verificar que o circuito hidráulico se aplica somente
para uma máquina o que é o suficiente para a análise inicial. Em estações de
compressão deste tipo, antes de passar pelos compressores, existem filtros que
retiram as impurezas do gás e limitam as partículas em um tamanho aceitável
para que a turbina não seja danificada.
Existe um elemento que pode ser utilizado de modo a manter a pressão
de sucção do compressor em um certo nível, neste caso representado por uma
válvula controladora de pressão que se encontra instalada na entrada da
tubulação com uma válvula manual em configuração by-pass. Um controlador
pode atuar diretamente nesta válvula com base na indicação de um medidor de
pressão fixado na entrada da turbina, caracterizando uma estrutura de controle
do tipo pressão de sucção invariante.
Com o acréscimo de pressão a temperatura do gás se eleva. Assim, na
saída do compressor existe uma etapa de resfriamento, geralmente com
ventiladores, que abaixam para a temperatura normal de transmissão. Após esta
etapa, o gás é liberado para a saída da estação onde se junta com a saída dos
outros compressores atuantes, aonde a pressão também é monitorada.
No controle de capacidade, existe um controlador programável em
conjunto com um sistema de monitoramento da pressão de saída e entrada da
estação, que tem ação direta na rotação da turbina a gás, caracterizando,
portanto um sistema de controle de capacidade por variação de rotação.
Uma pequena parcela do gás transportado é utilizada como combustível para a
turbina. Este consumo pode ser caracterizado, para efeito de simulação interna
do duto, como uma leve vazão a ser quantizada.
36
PRH-ANP 16
RELATORIO FINAL
Pode-se ressaltar a característica de alarme do medidor de vazão de
modo a proteger a integridade do compressor.
2.2.2- ESTAÇÃO DE ENTREGA
A linha de transmissão de gás possui várias estações de entrega
(denominadas city-gates) durante toda a sua extensão, cada uma com sua
determinada capacidade de entrega. O consumo é variável, assim a linha como
um todo deve se adequar a esta dinâmica de consumo e, portanto a vazão.
Torna-se necessário uma etapa de redução de pressão do gás para um
nível aceitável de segurança para o consumo. Basicamente o sistema de entrega
envolve quatro passos:
-
Passagem por filtros e cartuchos;
-
Troca de calor entre o gás e uma caldeira (boiler);
-
Redução de pressão;
-
Etapa de medição;
A passagem do gás por filtros e cartuchos permite a retirada de água e
de outras partículas.
A etapa de aquecimento do gás passando por uma caldeira é necessária
com o objetivo de evitar que o gás fique com temperaturas extremamente baixas
(abaixo de 0ºC) na etapa de redução e comprometa a estrutura de dutos.
Na etapa de redução o gás passa por válvulas redutoras de pressão
controladas através de atuadores pneumáticos, que trabalham de forma a
manter a pressão do gás em níveis aceitáveis.
Na etapa final o gás passa por medidores (geralmente do tipo turbina)
que contabilizam a quantidade de gás que esta sendo entregue a distribuidora.
Este valor é convertido para uma unidade de energia e enviado para uma central
de controle e supervisão.
Da mesma forma que em uma estação de compressão, uma parte do
gás é utilizada como fonte de energia para a estação de entrega, onde a maior
37
PRH-ANP 16
RELATORIO FINAL
parte do consumo ocorre nos aquecedores. O set-point da pressão do gás na
saída de estação é bem delimitado, por razões contratuais e de segurança a
junto às distribuidoras.
Cada estação de entrega pode ser contabilizada em termos de
simulação da linha, como um ramo com uma determinada perda de carga e com
u ma determinada vazão que pode variar ao longo do tempo.
É possível verificar, portanto a existência destas etapas em um diagrama
de fluxo de uma estação de entrega como ilustrado na Fig. 12:
Figura 12: Estação de entrega [Folder TBG]
2.2.3- ESTAÇÃO DE MEDIÇÃO
A estação de medição é basicamente constituída por um conjunto de
equipamentos de precisão que possibilitam a efetuação da medição da vazão da
linha principal, principalmente para efeito de faturamento. São utilizados
equipamentos com altas classes de precisão, para minimizar erros de
faturamento.
38
PRH-ANP 16
RELATORIO FINAL
O sistema de medição de variáveis e aquisição de dados do processo,
tanto para fins de tarifação (estação de medição), quanto para controle e
supervisão, seguem basicamente a estrutura indicada na Fig.13:
Figura 13: Diagrama de blocos da medição.
Elemento primário: São os medidores, elementos que possibilitam as
condições necessárias à medição. São placas de orifício, manômetros,
termistores etc.
Sensor: O sensor possui a função de detectar o nível da variável e assim
converter este nível para um sinal elétrico ou mecânico proporcional.
Conversor: Converte os sinais dos sensores em níveis compatíveis com
os controladores e/ou atuadores do sistema. Se o sinal do próprio sensor for
adequado, a existência do conversor não é necessária. Um exemplo em
gasodutos consiste nos computadores de vazão, que hoje possuem varias
funções agregadas, além de já converter o sinal de vazão para as unidades do
sistema.
Amplificador: Aumenta a magnitude do sinal do conversor ou sensor.
Transmissor: Possibilita o envio do sinal captado do sistema para um
outro local. Pode ser simplesmente um sistema de cabos, que transmite um sinal
elétrico, até um sistema de transmissão e recepção via satélite ou fibras ópticas.
Indicador: Promove a indicação e leitura da variável medida.
39
PRH-ANP 16
RELATORIO FINAL
Esta estrutura é perfeitamente adequada ao sistema de medição de
variáveis nas estações, podendo se tornar mais ou menos complexa dentro do
contexto de aplicação ao se utilizar controladores, sistemas de transmissão
remota, sensores inteligentes etc.
No caso das estações para a medição de gás, os equipamentos listados
acima devem possuir classes de exatidão adequadas a aplicação, objetivando
minimizar todas as formas de erro nas medições das variáveis do sistema.
Tais estações utilizam normalmente medidores do tipo placa de orifício,
turbina ou ultra-som. Outros dispositivos também podem ser agregados à
estação, como equipamentos para lançamento de pig´s de limpeza e/ou reparo e
medidores adicionais de pressão, vazão ou potencial, como pode ser verificado
na figura abaixo.
Figura 14: Estação de medição [Folder TBG].
Todos os equipamentos possuem comunicação com a central de
controle e supervisão, que recebe os dados, toma decisões e pode atuar no
sistema remotamente.
40
PRH-ANP 16
RELATORIO FINAL
Os equipamentos devem possuir segurança intrínseca especifica. Esta
técnica permite a proteção de áreas classificadas na utilização de equipamentos
elétricos, de forma que estes não constituam uma fonte de ignição em
atmosferas explosivas. São utilizados invólucros apropriados e limita-se a
energia dos sinais transmitidos na instrumentação empregada, de forma que a
energia utilizada não seja suficiente para causar uma explosão em uma
atmosfera explosiva. Logicamente, esta característica dos equipamentos deve
ser aplicada a todo o gasoduto, não sendo aplicável apenas em estações de
medição.
2.2.4- VÁLVULAS DE BLOQUEIO
As válvulas de bloqueio existentes no sistema possuem a função de
isolar trechos da linha em caso de vazamentos ou situações que signifiquem
risco ao processo. Cada válvula é acionada através de um circuito hidráulico,
que possui um redutor de pressão, além de um medidor de vazão em série com
a linha, que utiliza o próprio gás natural como fluido, possibilitando o
intertravamento em casos extremos.
De acordo com a medição de pressão diferencial do medidor placa de
orifício, o circuito hidráulico atua de forma a executar o bloqueio, que pode
ocorrer devido a uma vazão excessiva (rompimento do duto) ou por
sobrepressão no duto.
2.3- PROBLEMAS
Dentro de um sistema tão grande e com tantas variáveis, existem
grandes possibilidades de ocorrerem imprevistos. Porém, isto esta diretamente
ligado a qualidade e direcionamento dos equipamentos empregados no
gasoduto.
De maneira geral, o sistema inicialmente está susceptivo à:
41
PRH-ANP 16
-
Problemas ligados a sobrepressão;
-
Problemas ligados a subpressão;
-
Transitórios de pressão e vazão;
-
Falhas em equipamentos;
-
Vazamentos;
RELATORIO FINAL
Sendo que estes últimos são os mais problemáticos, pois os outros
podem ser contornados através de ações implementadas nos controles, com a
previsão de redundâncias e com manutenção preventiva.
No caso de vazamentos, a indeterminação de onde e como o problema
irá acontecer é a pior ocorrência não desejada, que pode ocasionar desastres
ambientais e acidentes fatais.
Dentro das soluções encontram-se técnicas de detecção por gradientes
de vazão, pressão e acústicas. A tecnologia ALDS (Acoustic Leak Detection
System) tem se mostrado a mais eficaz existente na detecção destes problemas.
Consiste numa técnica que utiliza sensores acústicos em pontos
estratégicos da linha de modo a captar ondas sonoras especificas. Estas ondas
sonoras têm natureza subsônica (abaixo de 1Hz) e são provocadas pelo
gradiente de pressão exercido no sistema quando ocorre uma ruptura. Os
receptores são sincronizados a um sistema GPS que permite a localização do
vazamento com uma boa eficácia.
Algumas outras características deste sistema são: [13]
-
Possibilita a localização do vazamento com a linha sem fluxo
(bloqueada);
-
Localização de vazamento com precisão de ±40m a ±80m;
-
Detecção muito rápida, entre 20s a 70s da ocorrência;
-
Baixa taxa de falsos alarmes (uma por ano);
-
Sensibilidade muito boa (pode detectar furos de 3mm a 5mm de
diâmetro);
-
Interface com sistema SCADA para Alarmes;
42
PRH-ANP 16
RELATORIO FINAL
2.4- CONSIDERAÇÕES
Este capítulo permitiu a visualização das estratégias de controle de
pressão e vazão de uma linha de gás natural, além dos principais componentes
de cada estação e suas características principais.
O conhecimento prévio das características intrínsecas de cada etapa do
processo é fundamental devido à escolha das estratégias de controle
adequadas. A forma de atuação dos equipamentos frente ao fluxo de gás é de
fundamental importância ao funcionamento do sistema, com o objetivo de
minimizar falhas decorrentes de situações aonde os limites dos equipamentos
são cobrados em situações anômalas ou de falhas de equipamentos.
43
PRH-ANP 16
RELATORIO FINAL
CAPITULO III
EQUIPAMENTOS E SISTEMAS PARA PROCESSAMENTO E CONTROLE
3.1- INTRODUÇÃO
Cada estação explicitada no capitulo anterior forma um subsistema de
um sistema maior que é o gasoduto. Desta forma, diversas ações devem ser
realizadas nestes subsistemas de maneira automatizada, como o controle da
rotação de compressores ou o controle de válvulas proporcionais ou discretas.
São necessários instrumentos com capacidade de processamento e tomada de
decisão atuando nestas unidades. Tanto para efetuação dos controles
propriamente dito, quanto no monitoramento de uma grande quantidade de
variáveis.
Muito
utilizado
em
plantas
industriais,
os
CP´s
(Controladores
Programáveis) possuem uma enorme gama de utilização em sistemas de
transporte de gás via dutos. Sua robustez, confiabilidade e facilidade de
programação permitem a utilização deste tal equipamento em aplicações
bastante criticas.
Novas arquiteturas de controle e automação como o Fieldbus
(Barramentos de Campo), possibilitam sistemas mais integrados, eficazes e mais
imunes à falhas de comunicação de dados.
3.2 - EQUIPAMENTOS DIGITAIS DE CONTROLE
O controle de pressão de um duto ocorre na estação de compressão
atuando na turbina, aumentando ou diminuindo a velocidade de rotação do
compressor como visto no capitulo II, verificando os limites (surge e stonewall)
para que o sistema não entre em colapso.
Para esta aplicação, o controle deve ser realizado através de um
equipamento capaz de executar um algoritmo de controle, tanto de velocidade,
44
PRH-ANP 16
RELATORIO FINAL
como para o controle anti-surge, podendo empregar-se um CP ou um
computador industrial.
3.2.1 - CONTROLADORES PROGRAMÁVEIS (CP´S).
O CP é um equipamento com capacidade de processamento como um
computador de uso industrial no qual é possível a implementação de uma lógica
de controle. Pode possuir um grande número de entradas e saídas e funções de
controle, além de funções avançadas de comunicação.
A facilidade da programação e sua robustez, aliadas a extrema
diversidade de equipamentos deste tipo existentes no mercado, fazem deste a
primeira alternativa de controle de processos industriais e em especial no
controle de estações de compressão, que exige que o sistema de controle seja
robusto à falhas.
3.2.1.1 - ESTRUTURA BASICA
A estrutura básica de um CP é composta basicamente:
-
Pontos de entrada;
-
Pontos de saída;
-
Unidade Central de Processamento;
Figura 15: Estrutura básica de funcionamento do CP
45
PRH-ANP 16
RELATORIO FINAL
Cada sinal recebido pelo CP, a partir de dispositivos ou componentes
externos (sensores do campo), são vistos como pontos de entrada. Os pontos de
entrada podem ser digitais ou analógicos. As entrada digitais reconhecem
apenas dois estados: ligado ou desligado. Já os pontos de entrada analógicos
reconhecem sinais com variações entre valores mínimos e máximos.
Normalmente a resolução é dada como um número múltiplo de dois (256, 1024,
4096, ...). Estes valores dependem do número de bits usado pelo conversor A/D
da entrada. Os sinais das entradas analógicas podem ser provenientes de
termopares, sensores resistivos de posição, sinais 4 a 20mA ou 0 a 10V, tensão,
corrente, etc.
Cada sinal produzido pelo CP para acionar dispositivos ou componentes
do sistema de controle (atuadores) constitui um ponto de saída. Novamente,
podemos separar em saídas digitais ou analógicas. Da mesma forma que as
entradas, as saídas digitais possuem apenas dois estados, enquanto saídas
analógicas possuem faixas de valores, sendo que a precisão se encontra ligada
ao numero de bits do conversor D/A correspondente. Pontos de saída digitais
podem ser utilizados no acionamento de relés, contatores ou ainda dispositivos
de eletrônica de potencia como SCR´s, TRIACS e IGBT´s. As saída analógicos,
podem fornecem correntes de 4 a 20mA, ou tensões de 0 a 10V ( mais comuns).
São usados para atuar válvulas proporcionais, o que deve acontecer, por
exemplo, na válvula de controle anti-surge e na válvula de entrada do
compressor de uma estação de compressão.
A conexão de sensores e sinais externos no controlador programável deve
ser feita com certo cuidado, devido a possibilidade de ocorrência de interferência
elétrica induzida por cabos de força ou acionamento. Como os sinais de entrada,
normalmente têm níveis de tensão e corrente pequenos (mV, no caso de
termopares), eles se tornam susceptíveis a interferências de campos elétricos e
magnéticos a sua volta. Assim, cabos de entradas analógicas devem ter malha
de blindagem, e os cabos de entradas (tanto analógicas quanto digitais) devem
ser conduzidos dos sensores ao CP via eletroduto ou calha específica, de metal
e com aterramento. Tais medidas aumentam a confiabilidade e robustez do
46
PRH-ANP 16
RELATORIO FINAL
sistema. Não se deve misturar aos cabos de entrada com cabos de acionamento
ou cabos de força. No caso de cruzamento entre cabos de entrada e cabos de
força ou acionamento, fazer o cruzamento a 90°, de forma a minimizar a
possibilidade de interferências. Deve-se evitar colocar cabos de entrada e cabos
de força “correndo” em paralelo em um eletroduto ou calha, pois o acoplamento
indutivo e capacitivo entre eles será maximizado. A utilização de entradas
analógicas a corrente (4 a 20mA) possuem maior imunidade a ruídos elétricos do
que entradas a tensão, pois apresentam uma menor impedância. São mais
aplicáveis em sistemas de controle para gasodutos por esta característica.
Da mesma forma, as saídas analógicas são pontos de saída de baixa
potência e, por isso, devem ser isoladas de cabos de força ou acionamento.
Podem ser incluídas no eletroduto ou calha com os cabos de entrada ao CP. No
caso de atuação de cargas indutivas, há de se considerar ainda a supressão da
força contra-eletromotriz gerada na bobina do atuador ao desligá-lo.
A unidade central de processamento é responsável pelo funcionamento
de todo a lógica de controle e supervisão. É composta por microprocessadores
ou microcontroladores responsáveis pela execução do programa aplicativo que
fica residente na memória interna. Pode manipular dados binários, decimais,
hexadecimais, etc.
A memória interna é dividida em:
o Memória do usuário;
o Memória de dados;
o Memória de entrada e saída;
o Memória do programa monitor;
A memória do usuário é onde se armazena o programa da aplicação
desenvolvido pelo usuário. Pode ser alterada conforme a necessidade, sendo
que alguns modelos de CP admitem a mudança em funcionamento inclusive “a
quente”. A memória de dados é a região de memória destinada a armazenar os
dados do programa do usuário. Estes dados são valores de temporizadores,
47
PRH-ANP 16
RELATORIO FINAL
valores de contadores, códigos de erro, senhas de acesso etc. São valores
armazenados que serão consultados e ou alterados durante a execução do
programa do usuário. Em alguns CP´s, utiliza - se a bateria para reter os
valores desta memória no caso de uma queda de energia.
A memória imagem das entradas e saídas é responsável por armazenar
os valores das entradas e saídas durante a execução cíclica do CP. Já a
memória do programa monitor é a região onde fica armazenado o sistema
operacional do CP [11].
3.2.1.2 - FUNÇÕES ESPECIAIS
Alguns CP´s possuem funções adicionais adequadas para o controle de
dutos. Além de funções de lógica combinacional e de seqüênciamento (para
realizar controles lógicos e intertravamentos), possuem também funções
especiais como:
o Função de controle PID;
o Comunicação via rede;
o Transmissão de dados wireless;
O controle da variação de velocidade de um compressor centrífugo de
uma estação de compressão de gás deve possuir característica Proporcional e
Integral, por exemplo. Em CP´s modulares pode se acoplar à função PID em
separado, de modo que o módulo executa o controle independente do
controlador. O controlador programável interage com o módulo através de
instruções de transferências de blocos de palavras. O controlador envia ao
módulo os parâmetros de ajuste de controle, tais como, ganhos, valores de setpoint, valores de alarme de alta e baixa e limites máximos de saída. O
controlador pode obter do módulo os dados referentes ao processo, valores de
entradas e saídas analógicas, limites de alarme e diagnósticos do próprio
módulo.
48
PRH-ANP 16
RELATORIO FINAL
Em algumas versões de controladores não existe um módulo específico
para o controle PID sendo que o controle é realizado pelo próprio CP pela forma
de instruções previamente inseridas no programa de usuário.
A comunicação via rede proporciona uma possibilidade de integração do
CP com outros equipamentos de medição e controle como, por exemplo,
FieldBus e sistemas SCADA. Normalmente a comunicação destes equipamentos
é realizada utilizando protocolos tipo Ethernet/TCP, MODBUS/TCP, Foundation
Fieldbus, DeviceNet ou Profibus. Em sistemas de controle de dutos de grande
porte, essa característica se torna essencial, pois a comunicação de dispositivos
adicionais como os computadores de vazão, geralmente são realizadas através
destes de protocolos de comunicação.
Existem CP´s que possuem capacidade de redundância de CPU´s, fonte
de alimentação, e eventualmente de módulos de entradas e saídas, o que
aumenta a confiabilidade do sistema. No controle de gasodutos, o sistema deve
ser instalado com o máximo nível de redundância possível, de forma a evitar
uma eventual falha nos processos devido a saída de operação do controlador.
3.2.1.3 - PROGRAMA APLICATIVO
A lógica que avalia a condição dos pontos de entrada e dos estados
anteriores do CP, executando as funções desejadas e acionando as saídas, é
chamado de programa aplicativo ou simplesmente programa do CP.
Para isso, o controlador lê ciclicamente as entradas, transferindo-as para
uma memória imagem (que recebe em cada endereço correspondente a uma
entrada o seu valor). De posse da memória imagem e dos estados internos
gerados pelos ciclos de execução anteriores, o CP gera uma memória imagem
das saídas conforme as operações definidas no programa aplicativo.
Por fim, a memória imagem das saídas é transferida para as saídas (valor
0 ou 1 causa o desligamento ou acionamento de uma saída digital, ou um valor
numérico modifica o valor de corrente ou tensão de uma saída analógica). Como
em vários sistemas de controle ou de automação é necessário o maior grau de
49
PRH-ANP 16
RELATORIO FINAL
paralelismo possível (em qualquer processo sempre pode ocorrer mais de um
evento diferente ao mesmo tempo), são empregados nos CP´s métodos
adequados para atualizações de dados nos controles.
Neste método os parâmetros de entrada (estado de ligações e valores de
variáveis) são mantidos numa tabela acessível por qualquer um dos blocos de
instrução que esteja sendo interpretado (memória imagem das entradas). Uma
segunda tabela (memória imagem das saídas), com os resultados produzidos
pela interpretação de cada bloco, vai sendo montada à medida que os blocos
vão sendo lidos e interpretados.
Assim, cada bloco poderá utilizar qualquer um dos parâmetros de entrada
sem que estes sejam alterados devido à atuação de algum outro bloco funcional.
Depois, no final do ciclo, a tabela de saída (com os resultados) é movida
diretamente para a tabela de entrada para que os novos valores estejam
disponíveis igualmente para todos os blocos no próximo ciclo.
É fácil perceber que esta forma de funcionamento faz com que todos os
blocos sejam interpretados de forma virtualmente paralela, o que permite a
elaboração de programas segmentados, onde cada parte pode controlar um
processo independentemente e ao mesmo tempo em que as demais.
50
PRH-ANP 16
RELATORIO FINAL
Figura 16: Forma cíclica de trabalho do CP
Esta estrutura, porém pode ser problemática quando se trabalha com
variáveis que podem variar muito rapidamente, pois neste caso a velocidade do
ciclo de execução do programa acarretaria em perda de informação. Assim, se
torna necessário à inclusão de interrupções no programa de modo a fazer a
leitura de determinada variável durante a própria execução do programa. Esta
característica pode ser importante na detecção rápida de variações abruptas dos
gradientes de pressão e vazão em gasodutos.
3.2.1.4 - LINGUAGENS DE PROGRAMAÇÃO
De acordo com a norma internacional IEC 61131-3 existem cinco tipos
básicos de linguagens para CP´s:
o Ladder ou diagrama de contatos;
o Linguagem por blocos funcionais;
o SFC - diagrama de funções seqüenciais;
o Lista de instruções;
51
PRH-ANP 16
RELATORIO FINAL
o Texto estruturado;
De maneira geral, os fabricantes de CP´s possuem softwares que
possibilitam a programação por parte do projetista em várias destas linguagens,
propiciando uma intercambiabilidade e agrupamento entre elas dentro de um
único projeto.
A estrutura básica para a criação e implementação de uma lógica de controle
para uma aplicação segue os seguintes passos:
Figura 17: Etapas para programação de um CP.
3.2.2- PC INDUSTRAL
O PC Industrial é um equipamento que funciona exatamente da mesma
forma que um computador pessoal convencional. Porém, possui diversas
características adicionais como:
-
Maior robustez externa para poder trabalhar em ambiente industrial;
-
Usa componentes mais confiáveis;
-
Possibilidade de funcionar 24 horas ininterruptas;
-
Utiliza sistema operacional mais robusto;
52
PRH-ANP 16
RELATORIO FINAL
A utilização deste tipo de equipamento para função de controle possui
algumas vantagens e desvantagens em relação a um CP, como:
-
Utilização de ambientes gráficos conhecidos;
-
Existência de IHM amigável;
-
Arquitetura aberta;
-
Possibilidade de utilização de um software supervisório no próprio
equipamento, possibilitando a coleta de dados e emissão de logs;
-
Maior facilidade na instalação em rede (utilização de TCP/IP);
-
Susceptibilidade a propagação de vírus via rede e/ou mídia de
entrada;
-
Confiabilidade do Sistema operacional;
-
Confiabilidade do microcomputador;
Este equipamento ainda não é utilizado em aplicações criticas de controle
como no controle de dutos, pois sua confiabilidade ante ao CP ainda é discutível.
Porém, atualmente são grandes os esforços de empresas do setor de
automação no sentido de se unir as melhores características dos dois
equipamentos. Por exemplo, a criação da Ethernet industrial (que está em
aprimoramento) pode aumentar a confiabilidade destes sistemas.
Existem também cartões de comunicação entre CP´s e computadores
industriais. Estes cartões são muito utilizados e são importantes na automação
de processos e máquinas, pois permitem que um sinal recebido por um CP,
possa acionar um contato de outro CP ou de uma placa conversora A/D
instalada em um computador distante. Tal tecnologia pode ser utilizada para
coleta de informações em um sistema de aquisição de dados para gasodutos
que não disponibilizem de transmissão via satélite. Realizando a transmissão de
dados via rede telefônica ou Internet.
53
PRH-ANP 16
RELATORIO FINAL
3.2.3 - SENSORES INTELIGENTES
Sensores inteligentes, de acordo com a norma IEEE1451, são
dispositivos que integram em si o elemento de medição, as funções de
compensação, as de processamento de dados e as de comunicação com uma
rede. Eles podem ser projetados para serem autocalibráveis, realizarem
autoteste, e utilizarem técnicas de processamento digital, entre outras. O sensor
instalado no campo possui um microcontrolador acoplado que o fornece essa
capacidade de processamento. Desta forma, a informação captada pelo sensor
já é analisada pelo processador e a tomada de decisão é enviada ao atuador
correspondente através de vias de rede tipo fieldbus.
Atualmente
já
existem
microcontroladores que
integram
em
si
subsistemas de JAVA, BASIC e protocolos de comunicação como o TCP/IP, cuja
implementação em dispositivos programáveis pode vir a ser uma possibilidade
concreta de extensão num futuro próximo.
Pelo fato de ser uma tecnologia nova, ainda estes sensores inteligentes
não são freqüentemente utilizados no controle de sistemas com risco intrínseco,
porém são grandes promessas nesta área.
3.3- ESTRUTURAS DE CONTROLE
De maneira geral, os diversos sistemas de controle podem ser
classificados como centralizado e distribuído. O controle centralizado tem como
base uma única central de controle atuando em um processo com centenas ou
milhares de pontos de entrada e saída. Já nos sistemas de controle distribuído,
as etapas de controle são divididas de forma a se obter um sistema onde o
controle é executado próximo aos elementos de captação de dados ou neles
próprios (sensores “inteligentes”).
Cada arquitetura de controle utiliza uma destas configurações. O
controle totalmente centralizado não é mais utilizado em novas unidades. Em
gasodutos, o que se verifica é a possibilidade de atuação no sistema através de
54
PRH-ANP 16
RELATORIO FINAL
uma central de controle e monitoramento, mas com o controle afetivo dos
equipamentos sendo executado próximo destes. A maneira de controle e
comunicação de dados está intimamente ligada as estruturas de controle
utilizadas nos subsistemas de uma linha de dutos.
3.3.1- ESTRUTURAS UTILIZANDO CP
A estrutura de controle mais utilizada atualmente em processos é a que
se baseia em um controlador programável como central de controle de um
determinado processo. Neste tipo de configuração existe uma grande utilização
de cabos e condutores para permitir a transferência de sinal do processo ao CP
e vice-versa. Por exemplo, no caso de uma estação de compressão, os cabos
dos sensores e atuadores devem seguir todos de forma a chegar no módulo de
I/O do CP.
Figura 18: Arquitetura tradicional com CP.
Não é difícil perceber que nesta topologia se torna necessário uma
grande quantidade de cabos, pois de cada sensor deve sair pelo menos um par
de cabos até o módulo do controlador. Isto pode ser um problema em caso de
estações onde os equipamentos se encontram muito espaçados uns dos outros,
ou que sejam de grande porte devido ao alto custo de instalação.
55
PRH-ANP 16
RELATORIO FINAL
3.3.2- FIELDBUS
O conceito de fieldbus ou, barramento de campo, consiste em interligar
os sensores e atuadores de um subsistema através de uma rede multi-drop de
comunicação (com base no modelo OSI) formada por um único cabo.
A comunicação entre os dispositivos é efetuada de maneira digital, através
de frame de dados, utilizando o formato serial. Isso proporciona algumas
vantagens:
o Transmissão de dados eficiente;
o Maior imunidade a interferências eletromagnéticas;
o Maior confiabilidade dos dados (com utilização de bits de
paridade);
o Comunicação bi-direcional (Half-Duplex);
A norma IEC 61158, objetivando a regulamentação de alguma
padronização na área, definiu a existência de 8 tipos de Fieldbus, com protocolos
e formas de atuação diferentes: Fieldbus Foundation; ControlNet; Profibus; PNet; High Speed Ethernet; SwiftNet; WorldFip; Interbus. Destaca-se a utilização
dos sistemas Profibus, Fieldbus Foundation e Interbus.
O Foundation Fieldbus, por exemplo, mantém muitas das características
operacionais do sistema analógico 4-20 mA, tais como uma interface física com
padronização da fiação, dispositivos alimentados por um único par de fios e as
opções de segurança intrínseca, e ainda oferece uma série de benefícios
adicionais aos usuários:
Interoperabilidade: Com a interoperabilidade, um dispositivo Fieldbus
pode ser substituído por um dispositivo similar com maior funcionalidade de um
outro fornecedor, mantendo as características originais. Isto permite aos usuários
mesclar dispositivos de campo e sistemas de vários fornecedores. Dispositivos
individuais Fieldbus podem transmitir e receber a informação de variáveis,
56
PRH-ANP 16
RELATORIO FINAL
permitindo que novos dispositivos sejam adicionados ao barramento sem
interromper o sistema.
Dados de Processo Mais Completos: Com o Fieldbus as variáveis de
cada dispositivo podem ser enviadas a supervisório para análises, registros,
estudos de otimização de processo e geração de relatórios.
Vista expandida do processo: Mecanismos eficientes de comunicação
de dados permitem que os erros possam ser reconhecidos mais rapidamente e
com uma maior precisão. Como conseqüência, os operadores de planta são
notificados de condições anormais ou da necessidade de manutenção
preventiva. Esta característica permite uma ação corretiva mais rápida em caso
de falha, por exemplo, uma ocasião de vazamentos de gás.
Maior Segurança da unidade: Fornecendo aos operadores notificações e
avisos antecipados de circunstâncias perigosas, pendentes e atuais, a tecnologia
Fieldbus permite a ação corretiva antes de uma parada não planejada. As
potencialidades de diagnóstico das unidades reduzem também a necessidade do
acesso freqüente às áreas perigosas, minimizando assim os riscos pessoais.
Redução de Custos de fiação e de Manutenção: O Fieldbus pode
utilizar a fiação já existente, e as conexões multi-drop fornecem economias
significativas nos custos de instalação. Isto inclui reduções nos custos em
barreiras de segurança intrínseca e de cabos, particularmente nas áreas onde a
fiação já está presente. Redução de custo adicional pode ser conseguida com a
redução do tempo necessário para a construção e partida do sistema, bem como
com a simplificação da programação das funções do controle e de lógica, usando
os blocos de função embutidos nos dispositivos.
Com objetivo de alcançar uma maior confiabilidade, foi prevista em
sistemas de Fieldbus a capacidade de substituição imediata de instrumentação
de controle, em caso de pane, por outro de modo a implementar a mesma
função. Pela necessidade de se integrar um subsistema, não importando o
57
PRH-ANP 16
RELATORIO FINAL
fabricante dos equipamentos, a padronização das funções foram distribuídas
através de blocos funcionais (BF´s). Assim, interligando blocos funcionais é fácil
restabelecer uma estratégia de controle e a programação do processo a ser
controlado. Na configuração seleciona-se a FB e em que dispositivo será
executado.
Atualmente a tecnologia Fieldbus atua em conjunto com um CP ou um PC
industrial na execução de algoritmos de controle. Existe uma tendência de
utilização de sensores inteligentes e distribuição máxima das estruturas de
controle. De maneira geral, é possível aplicar o sistema de Fieldbus em três
estruturas básicas:
o Blocos de E/S digitais adaptando os sinais de sensores e
atuadores de um sub-sistema à uma rede Fieldbus, com o
controle feito por um CP ou PC industrial;
o Utilização de sensores e atuadores inteligentes com controle
sendo feito parte no próprio instrumento, ou parte pelo CP/PC
industrial
que realiza também a comunicação com o
supervisório;
o Utilização de sensores inteligentes realizando o controle
completo em comunicação com o supervisório;
58
PRH-ANP 16
RELATORIO FINAL
Figura 19: Arquitetura utilizando Fieldbus e instrumentos inteligentes.
A forma mais usual de utilização é com blocos de entrada e saída,
utilizando os sensores e atuadores sem capacidade de processamento. Estes
blocos possibilitam a transferência de sinais de padrões de corrente e tensão
tradicionais utilizados por sensores e atuadores (4-20mA, 0-5V etc), para sinais
digitais dos protocolados de redes ou sistemas Fieldbus. Desta forma tais blocos
devem estar fisicamente próximos ao processo para possibilitar uma economia
de cabeamento.
3.3.2.1 - ASPECTOS TÉCNICOS
Existem vários fatores que podem influenciar o desempenho de um
sistema de controle via rede Fieldbus. Alguns deles são:
o Modelo da rede;
o Eficiência do protocolo de comunicação;
o Taxa de transmissão;
Uma rede Fieldbus basicamente pode ser duas naturezas: origem-destino,
no qual as informações são endereçadas a um determinado equipamento que irá
usufruir daquele dado; ponto-a-ponto; ou do tipo produtor-consumidor, onde a
informação possui um identificador e pode ser utilizada por qualquer
59
PRH-ANP 16
RELATORIO FINAL
equipamento que esteja ligado ao barramento no momento em que ela for
disponibilizada. Este último modelo é o modo mais eficiente para transferência
de dados entre vários usuários. Desta forma, o sinal do sensor de rotação do
compressor em uma estação de compressão é consumido pelo controlador ao
mesmo tempo em que um indicador mostra a visualização da grandeza em IHM,
por exemplo. Da mesma forma, o atuador da turbina consome a informação
oriunda do controlador.
A eficiência do protocolo de comunicação é dada basicamente através da
comparação do total de bytes que trafegam na rede e do numero de bytes que
correspondem aos dados. A taxa de transmissão do sistema é padronizada
através de normas.
Os tipos mais comuns de comunicação existentes entre equipamentos
são:
o Ponto
a
ponto:
Dados
enviados
no
barramento
são
aproveitados pelos dispositivos que necessitam.
o Mestre-escravo: O mestre solicita o envio de informação de
todos os dispositivos do barramento.
o Multimestre: Podem existir outros equipamentos mestres.
Necessário a utilização de Token.
As redes tipo produtor-consumidor são capazes de suportar qualquer um
dos três modos de comunicação.
O Fieldbus é baseado no sistema OSI, porém não possui todas as suas
definições de camadas. As camadas do Fieldbus se dividem em: camada física e
camadas de software.
60
PRH-ANP 16
RELATORIO FINAL
Camada física
A camada física trata do meio físico, equipamentos, conectores dentre
outros dispositivos para a realização das interligações. A norma ANSI/ISAS50.02-1992 define e conceitua os principais itens. Alguns deles são:
o Transmissão de dados somente digital;
o Comunicação bidirecional;
o Velocidades de transmissão de 31,25 Kb/s, 1.0 Mb/s e 2.5
Mb/s;
o Modulação de tensão (acoplamento paralelo);
o Código Manchester;
o Barramento sem energia, não intrinsecamente seguro
o Barramento com energia, não intrinsecamente seguro;
o Barramento sem energia, intrinsecamente seguro;
o Barramento com energia, intrinsecamente seguro.
Os sistemas Fieldbus, para serem utilizados em sistemas para controle de
gasodutos, devem possuir segurança intrínseca, ou seja, possuir níveis de
tensões e correntes limitados para não haver risco de explosões. A velocidade
normalizada é 31,25 Kb/s para instrumentos em campo. As outras velocidades
são utilizadas para a interligação de bridges e gateways para a conexão em alta
velocidade destes dispositivos.
Nível de Enlace
Este nível controla o acesso ao meio de transmissão, determinando quem
pode transmitir e em que momento, garantindo também que os dados cheguem
de maneira correta aos equipamentos. A garantia de integridade é feita por dois
bytes calculados através um polinômio de check aplicado a todos os bytes da
mensagem e que é acrescentado no final da mesma. A camada de enlace possui
ainda uma série de características técnicas como:
61
PRH-ANP 16
RELATORIO FINAL
o Forma de acesso ao meio: pode ser por passagem de Token,
Requisição de Token ou resposta Imediata. Na passagem
Token, o equipamento que o recebeu envia a informação e o
retorna para o Link Active Scheduler (LAS). Na requisição de
Token, o equipamento que deseja enviar a informação solicita
o mesmo através de um código em uma das resposta
transmitidas por ele no barramento. Em resposta imediata, o
mestre permite que a estação responda através de uma
mensagem.
o Sincronização
do
tempo:
Importante
para
manter
o
sincronismo do barramento.
o Escalonamento: Coordenação do tempo necessário para cada
transmissão na rede, definindo prioridades.
o Endereçamento: Pode ser usado para endereçar desde uma
variável até um grupo de estações.
o Passagem do Token num anel lógico: Método utilizado pelo
Profibus.
Nível de Aplicação
O nível de aplicação é responsável pela definição de como ler, escrever e
iniciar um aplicativo em uma estação remota sendo que a principal tarefa é a
definição de uma sintaxe para as mensagens. Ele também define a forma de
transmissão das mensagens, ou seja, se esta se dá imediatamente, ou somente
uma vez quando requisitado pelo consumidor ou ainda ciclicamente.
O gerenciamento define como inicializar a rede e suas atribuições
subseqüentes. Ele também controla a operação da rede com levantamento
estatístico de detecção de falhas e de adição de um novo elemento ou remoção
de uma estação. O gerenciamento ainda faz o monitoramento continuo do
barramento para identificar a adição de novas estações.
62
PRH-ANP 16
RELATORIO FINAL
Nível do Usuário
Este nível possui como objetivo definir a forma de acesso de informação
dentro dos equipamentos Fieldbus e ainda de como esta informação pode ser
distribuída por entre os nós da rede. Este atributo é fundamental para aplicações
em controle de processo. A aquisição de dados, controle PID, cálculos e atuação
dentre outras funções são definidos dentro do sistema Fieldbus, através de
blocos funcionais que contém um algoritmo, uma base de dados (entradas e
saídas) e um nome definido pelo usuário (Tag name). Cada equipamento
FIELDBUS contém um número definido de blocos funcionais.
3.3.2.2- TOPOLOGIAS EM FIELDBUS
são:
As topologias que de maneira geral são utilizadas em um sistema Fieldbus
o Topologia Ponto a Ponto: Ligação em série de todos os
equipamentos utilizados na aplicação. As instalações que
utilizam esta topologia devem usar conectores de maneira que
a desconexão de um equipamento não interrompa a
continuidade da rede.
o Topologia de Barramento com Spurs: Barramento único com
equipamentos
ou
barramentos
secundários
(spurs)
diretamente.
o Topologia End to End: Utilizada na conexão de apenas dois
equipamentos. Pode estar no campo ou ainda ligar um
equipamento de campo ao Device Host.
o Topologia em Árvore: Concentração em caixas de campo a
ligação de vários equipamentos.
o Topologia Mista: Topologia que mescla as topologias em
árvore, barramento de spurs e ponto-a-ponto.
63
PRH-ANP 16
RELATORIO FINAL
3.3.2.3- FISCO
Um sistema FISCO (Fieldbus Intrinsically Safe Concept) nada mais é que
um sistema Fieldbus capaz de possuir um barramento intrinsecamente seguro e
capaz de suprir a altas demandas de consumo.
Este sistema foi concebido através de severos testes. Alguns dos
requisitos do padrão são:
o Única fonte de alimentação ativa por sistema;
o Nós passivos com indutâncias e capacitâncias internas
desprezíveis;
o Comprimento máximo do cabeamento de 1000m com
terminações nas duas pontas;
o Equipamentos de campo e fonte de alimentação compatível
com sistema FISCO;
O sistema consiste de uma série de especificações técnicas para todos os
elementos da camada física, de forma a possibilitar uma melhor utilização do
sistema. O conceito FISCO foi otimizado para que seja permitido um numero
maior de equipamentos de campo, de acordo com o comprimento do
barramento, levando-se em conta as variações das características do cabo,
terminadores, segurança intrínseca, etc. Desta maneira consegue-se aumentar a
capacidade de corrente por segmento. A solução FISCO permite que se tenha
10 a 12 equipamentos por segmento fieldbus ao invés de 4 ou 5 de alguns
sistemas típicos.
Este padrão, portanto é bastante aplicável em ambientes com risco de
explosão como no setor de petróleo e gás, podendo ser utilizado no controle de
gasodutos para aumentar a segurança do sistema [14].
64
PRH-ANP 16
RELATORIO FINAL
3.4-) CONSIDERAÇÕES
Mostrou-se através deste capítulo os princípios de funcionamento de
equipamentos dedicados a efetuar o controle em sistemas de dutos.
As estruturas de controle podem ser aplicadas em várias etapas de um
gasoduto, como por exemplo, diversas estações de compressão interligadas
através de um sistema SCADA (Supervisory Control and Data Aquisition) de
forma a se obter os dados de supervisão e possibilitar também um
monitoramento à distância das mesmas. Este tipo de integralização será o tema
abordado no próximo capitulo.
65
PRH-ANP 16
RELATORIO FINAL
CAPITULO IV
APLICAÇÃO DO SISTEMA SCADA NO CONTROLE DE VARIÁVEIS
4.1- INTRODUÇÃO
O sistema SCADA (Supervisory Control and Data Aquisition) é o sistema
mais utilizado no controle de gasodutos e polidutos modernos em todo o mundo,
por sua grande versatilidade e capacidade de gerenciamento e atuação à
grandes distâncias em sistemas de grande porte.
Os
primeiros
sistemas
SCADA
possuíam
natureza
estritamente
telemétrica, atuando de maneira a informar de maneira periódica a situação de
um determinado sistema através de monitoramento da condição dos dispositivos
e de sinais referentes ao processo. E a interface com o operador a distância
ocorria através de indicadores em painéis luminosos, constituindo um sistema
supervisório básico.
Com o advento dos computadores como instrumentos de análise e
tratamentos de dados e sinais, juntamente com a capacidade de processamento
de funções complexas, possibilitou-se que funções de controle fossem também
implementadas de modo a utilizar o computador como central de controle com
gerenciamento de milhares de variáveis simultaneamente.
O grande número de variáveis a serem controladas em um gasoduto e o
risco inerente a atividade, necessita de um sistema robusto e insusceptível à
falhas. Desta forma, o sistema SCADA vem a atender estes requisitos, como
será visto neste capítulo.
4.2- CARACTERIZAÇÃO DE UM SISTEMA SCADA
O sistema de controle e monitoramento de um gasoduto segue, de
maneira geral, a estrutura de qualquer sistema automatizado, que em linhas
gerais pode ser representado através da figura abaixo.
66
PRH-ANP 16
RELATORIO FINAL
Figura 20: Estrutura de controle e supervisão de processos.
Os sistemas SCADA atuam de acordo com esta filosofia, porém
possibilitam outras facilidades não previstas neste esquemático (Fig. 21). São
compostos por dispositivos que podem ser classificados basicamente pelas
seguintes unidades:
-
Sensores e atuadores
-
Estações remotas
-
Rede de comunicações
-
Estações de monitoramento central
67
PRH-ANP 16
RELATORIO FINAL
Figura 21: Esquema básico de funcionamento do sistema SCADA.
4.2.1- SENSORES E ATUADORES
Os sensores e atuadores são dispositivos conectados aos dispositivos da
rede com o objetivo de serem controlados e monitorizados pelo sistema SCADA.
Os sensores realizam a conversão dos parâmetros físicos para sinais analógicos
e digitais legíveis pela estação remota. São as variáveis de entrada do sistema,
que serão analisadas para a realização do controle.
Os atuadores são dispositivos (pneumáticos ou elétricos) que permitem
modificar as variáveis do sistema, ligando, desligando ou controlando
determinados equipamentos. São desta forma, as saídas do sistema de controle.
4.2.2- ESTAÇÕES REMOTAS
O processo de controle e aquisição de dados tem inicio nas estações
remotas, compostas por CP´s (Controladores Programáveis) e/ou RTUs (Remote
Terminal Units), com a leitura dos valores atuais dos dispositivos que lhes estão
associados e o respectivo controle.
Os RTU´s são unidades com base em computador, dedicadas à
aquisição de dados ao controle de processos através dos quais as estações
68
PRH-ANP 16
RELATORIO FINAL
centrais de monitoramento. Comunicam-se com os dispositivos existentes no
gasoduto. São basicamente constituídos por:
o CPU e memória volátil;
o Memória não volátil para armazenamento de programas e dados
o Capacidade de comunicação serial e/ou modem.
o Fonte de tensão com backup a bateria
o Auto-monitoramento contra falhas
Os CP´s, como foi explicitado no capitulo anterior, apresentam como
principal vantagem à programação conhecida pelos instrumentistas e o controle
de I/O. Por outro lado, os RTU´s possuem boas capacidades de comunicação,
incluindo comunicação via rádio, satélite e internet, estando especialmente
indicados para situações adversas onde a comunicação é difícil. Ideais para a
atuação em estações de compressão, medição ou distribuição, que de maneira
geral se encontram distante da central.
O RTU ainda possui um importante diferencial, é multi–tarefa com
recursos para atendimento de interrupções e escalonamento de tarefas,
diferentemente do CP que executa as tarefas passo a passo de maneira
seqüencial. Esta característica é importante fator na detecção de falhas em curto
especo de tempo.
Atualmente existe uma convergência no sentido de reunir as melhores
características destes dois equipamentos, a facilidade de programação e
controle dos CP´s e as capacidades de comunicação dos RTU´s.
4.2.3- REDE DE COMUNICAÇÕES
A rede de comunicações é a plataforma através da qual a informação de
um sistema SCADA é transferida. As redes de comunicação podem ser
implementadas através dos seguintes meios físicos (entre outros meios
possíveis), tendo em consideração os requisitos do sistema e as distâncias a
cobrir:
69
PRH-ANP 16
-
RELATORIO FINAL
Cabos - Os cabos estão indicados para a cobertura de pequenas
distâncias, normalmente em fábricas, não sendo adequados para grandes
distâncias devido ao elevado custo da cablagem, instalação e manutenção;
-
Linhas Dial-Up - As linhas Dial-Up podem ser usadas em sistemas com
atualizações periódicas, os quais não necessitem de uma conexão permanente.
Desta forma, quando for necessário comunicar com uma estação remota é
efetuada uma ligação para o respectivo número;
-
Linhas Dedicadas - As linhas dedicadas são usadas em sistemas que
necessitam de conexão permanente. Esta é uma solução cara, pois é necessário
o aluguel permanente de uma linha telefônica ligada a cada estação remota;
-
Radio Modems – Dispositivos são usados em locais onde não estão
acessíveis linhas telefônicas (Fig. 22). Por vezes, em situações onde uma
ligação direta via rádio não pode ser estabelecida devido à distância, é
necessária a instalação de dispositivos repetidores.
Figura 22: Estrutura de uma RTU com transmissão via radio modem.
70
PRH-ANP 16
RELATORIO FINAL
Satélite: São aplicadas em sistemas de distancias extremamente longas
-
(gasodutos de grande porte e com grande distancia da central). Existem alguns
sistemas usuais de envio de dados via satélite sendo dois dos mais importantes
o Inmarsat e Vsat (very small aperture terminal) dentre outros sistemas. As
atualizações para a central podem ser em tempo real ou entre intervalo de
tempo.
-
Fibra Óptica: As informações digitalizadas podem ser transferidas
através de fibra óptica. O custo, a exemplo do sistema com cabos, é o grande
limitador do uso deste meio que se torna inviável para grandes distancias.
4.2.4- ESTAÇÕES DE MONITORAMENTO CENTRAL
A estação de monitoramento central é a unidade principal do sistema
SCADA, sendo responsável por recolher a informação gerada pelas estações
remotas e agir em conformidade com os eventos. Podem estar centralizadas
num único computador, ou distribuída por uma rede de computadores de modo a
permitir a divisão da informação proveniente do sistema SCADA, facilitando o
processamento.
A interação entre os operadores e o sistema SCADA (campo) é realizada
através de uma interface Homem-Máquina. Assim é possível visualizar um
diagrama representativo do gasoduto, a representação gráfica das estações
remotas (compressão, medição e entrega), os valores atuais dos equipamento, e
a apresentação dos alarmes detectados através de software especifico instalado
nos computadores da estação de monitoramento central. Este software permite a
visualização em vários níveis, desde uma visão geral tanto quanto uma visão
especifica de determinado equipamento, como por exemplo, um compressor e a
sua vazão e pressões internas especificas.
4.3- FUNÇÕES
Os sistemas SCADA apresentam, entre outras, as seguintes funções:
-
Aquisição de dados
71
PRH-ANP 16
-
Visualização de dados
-
Processamentos de alarmes
-
Tolerância à falhas
RELATORIO FINAL
4.3.1- AQUISIÇÃO DE DADOS
A aquisição de dados é o processo que envolve a coleta e transmissão de
dados desde o gasoduto, eventualmente de remotas, até às estações centrais de
monitoramento.
O processo de aquisição de dados inicia-se no gasoduto, onde as
estações remotas lêem os valores dos dispositivos de medição conectados a
linha. O sinal de 4 à 20 mA, padrão da maioria dos instrumentos, é digitalizado
com algum instrumento (A/D) e depois condicionado para a transmissão.
Normalmente é utilizado um computador de vazão, onde as variáveis são
digitalizadas e transferidas utilizando um protocolo digital (MODBUS / TCP/IP
entre outros) compatível com o sistema de transmissão utilizado. (via satélite ou
rede telefônica).
Na fase de transmissão de dados deve ser escolhido um modo de
comunicação, quer em modo de comunicação por polling, quer em modo de
comunicação por interrupção (Report by Exception), e desta forma os dados são
transmitidos através da rede de comunicações até à estação central.
Por fim, o processo de aquisição de dados é concluído com o respectivo
armazenamento em bases de dados.
4.3.2- VISUALIZAÇÃO DE DADOS
A visualização de dados consiste na apresentação de informação através
de interfaces homem-máquina, geralmente acompanhados por animações, de
modo a simular a evolução do estado dos dispositivos controlados na instalação
fabril.
72
PRH-ANP 16
RELATORIO FINAL
Os sistemas SCADA permitem visualizar, além dos dados recolhidos,
previsões e tendências do processo produtivo com base em valores recolhidos e
valores parametrizados pelo operador, bem como gerar gráficos e relatórios
relativos a dados atuais e os armazenados em histórico.
Além disso, funções do software principal podem possibilitar a visualização
gráfica de gradientes de pressão, vazão, temperatura, velocidade no duto.
Fazem o acompanhamento de PIG´s de limpeza e inspeção, além de efetuar o
calculo de inventario da linha e auxiliar na detecção de vazamentos.
4.3.3- PROCESSAMENTO DE ALARMES
O processamento de alarmes assume um papel de elevada importância
na medida em que permite informar situações de funcionamento adverso e
anomalias no sistema, sugerir medidas a tomar e, em determinadas situações,
reagir automaticamente mediante parâmetros previamente estabelecidos.
O computador ao analisar os dados recolhidos, verifica se algum dos
dispositivos gerou valores de exceção indicadores de situações de alarme.
No tratamento de valores digitais, as situações de alarme podem ser
detectadas através de uma variável que assume o valor 0 ou 1; no tratamento de
valores analógicos são definidos valores que limitam as situações aceitáveis, de
modo a que quando os valores lidos estiverem situados fora das faixas de
valores permitidos seja detectada uma situação de alarme.
Além das situações de alarme detectadas com base nos valores lidos
pelos dispositivos, os sistemas SCADA podem fazer soar alarmes com base na
ocorrência de determinadas combinações de eventos.
Os alarmes são classificados por níveis de prioridade em função da sua
gravidade, sendo reservada a maior prioridade para os alarmes relacionados
com questões de segurança.
Em situações de falha do servidor ou da rede de comunicações, é
possível efetuar o armazenamento das mensagens de alarme em buffer, o que,
aliado à capacidade de transmissão de mensagens de alarme para vários
servidores, permite atingir um maior grau de tolerância à falhas.
73
PRH-ANP 16
RELATORIO FINAL
Através da informação proveniente de login, os sistemas SCADA
identificam e localizam os operadores, de modo a filtrar e encaminhar os alarmes
em função das suas áreas de competência e responsabilidade.
Os sistemas SCADA guardam em arquivos digitais a informação relativa a
todos os alarmes gerados, de modo a permitir que posteriormente se proceda a
uma análise mais detalhada das circunstâncias que geraram a sua origem.
4.3.4- TOLERÂNCIA A FALHAS
Para atingir níveis aceitáveis de tolerância à falhas é usual a existência de
informação redundante na rede e de máquinas backup como CP´s em standby,
de modo a permitir que sempre que se verifique uma falha num computador, o
controle das operações seja transferido automaticamente para outro computador
(uma réplica de backup) sem que se notem interrupções significativas.
Tais redundâncias acarretam um aumento significativo na confiabilidade
da linha de dutos a ser controlada, devido a menor exposição do sistema de
controle e aquisição de dados a colapsos por falhas individuais.
4.4- MODOS DE COMUNICAÇÃO
Os sistemas SCADA utilizam genericamente dois modos de comunicação:
sistema mestre-escravo e comunicação por interrupção, normalmente designada
por Report by Exception.
4.4.1- COMUNICAÇÃO MESTRE-ESCRAVO
Neste modo de comunicação, a estação central (Mestre) tem o controle
absoluto das comunicações, efetuando seqüencialmente o polling aos dados de
cada estação remota (Escravo), que apenas responde à estação central após a
recepção de um pedido, ou seja, em configuração de envio de dados half-duplex.
Cada estação remota é identificada por um endereço único. Se uma
estação remota não responder durante um pré-determinado período de tempo,
74
PRH-ANP 16
RELATORIO FINAL
às solicitações que lhe são dirigidas, a estação central efetua novas tentativas de
polling antes de avançar para a próxima estação.
São apresentadas as principais vantagens e desvantagens deste modo de
comunicação.
Vantagens
-
Simplicidade no processo de recolha de dados;
-
Inexistência de colisões no tráfego da rede;
-
Permite, devido ao seu caráter determinístico, calcular a largura de
banda utilizada pelas comunicações e garantir os tempos de resposta;
-
Facilidade na detecção de falhas de ligação;
-
Permite o uso de estações remotas não inteligentes.
Desvantagens
-
Incapacidade, por parte das estações remotas, de comunicar situações
que requeiram tratamento imediato por parte da estação central;
-
O aumento do número de estações remotas leva a impactos negativos
no tempo de espera;
-
A comunicação entre estações remotas tem obrigatoriamente que passar
pela estação central.
4.4.2- COMUNICAÇÃO POR INTERRUPÇÃO
Neste modo de comunicação a estação remota monitora os seus valores
de entrada e quando detecta alterações significativas, os valores que
ultrapassarem os limites definidos, inicia a comunicação com a estação central e
a conseqüente transferência de dados.
O sistema está implementado de modo a permitir a detecção de erros e
recuperação de colisões.
75
PRH-ANP 16
RELATORIO FINAL
Antes de iniciar a transmissão, a estação remota verifica se o meio de
transmissão está para ser utilizado por outra estação, aguardando se isto
ocorrer, um tempo aleatório antes de efetuar nova tentativa de transmissão.
Em caso de colisões excessivas em que o sistema é gravemente afetado,
a estação remota cancela a transmissão aguardando que a estação central
proceda à leitura dos seus valores através de polling.
São apresentadas as principais vantagens e desvantagens deste modo de
comunicação.
Vantagens
-
Evita a transferência de informação desnecessária, diminuindo o tráfego
na rede;
-
Permite uma rápida detecção de informação com caráter urgente;
-
Permite comunicação entre estações remotas (Escravo/Escravo).
Desvantagens
-
A estação central apenas consegue detectar falhas na ligação após um
determinado período de tempo, ou seja, quando efetua polling ao sistema;
-
É necessária a existência de ação por parte do operador para obter os
valores atualizados.
4.5- SOFTWARE
O software do sistema SCADA é o que permite a interface entre o
operador e o gasoduto. Através do software o operador da central de controle e
supervisão consegue não só visualizar o que ocorre no sistema como um todo,
como atuar nele à distância. O pacote de maneira geral é comprado pela
companhia detentora da concessão de operação do gasoduto, e assim esta irá
implementar a construção de um aplicativo cujo tamanho, detalhamento e formas
76
PRH-ANP 16
RELATORIO FINAL
de visualização será de acordo com a sua aplicação, como tamanho da rede,
numero de estações, compressores dentre outros fatores. Existem ferramentas
que possibilitam a emissão de relatórios, análise dos dados, otimização e
ferramentas para facilitar a visualização.
Além disso, existem funções adicionais que podem ser somadas ao
pacote original, que possibilitam, por exemplo, o monitoramento de “pigs” de
limpeza e inspeção, detecção de vazamentos, cálculo de armazenamento de gás
nos dutos e acompanhamento dos gradientes hidráulicos da linha.
4.5.1- FACTORYSUITE
Como exemplo de software para aplicações em sistemas SCADA, temos
o pacote Factorysuite da Wonderware que possui os seguintes componentes:
•
InTouch
•
IndustrialSQL Server
•
FactorySuite Web Server
•
InControl
•
InTrack
•
InBatch
•
I/O Servers
A combinação do IndustrialSQL Server com o InTrack e o InTouch permite
obter informação sobre o processo de produção em tempo real, e armazenar um
histórico completo das operações e dos produtos, para posterior análise.
Esta combinação pode ser otimizada com a adição do InBatch e do
SPCPro de modo a incorporar processamento de lotes e estatísticas.
Através da publicação no FactorySuite Web Server, a informação pode
ficar acessível aos vários utilizadores da empresa através da Internet.
Os componentes do FactorySuite estão integrados, o que significa menor
necessidade de codificação, menos interfaces, menor tempo de configuração e
77
PRH-ANP 16
RELATORIO FINAL
inexistência de custos adicionais para integração. Dado que todos os
componentes têm uma base de dados comum, trabalham em conjunto, partilham
informação entre aplicações, têm a mesma aparência e suportam mecanismos
de comunicação comuns.
O FactorySuite permite aumentar a sua funcionalidade através do uso de
toolkits, OPC, DCOM, VBA e ActiveX.
4.5.1.1- InTouch
O InTouch é uma interface gráfico homem-máquina, desenvolvido para a
indústria de automação, supervisão e controle de processos que permite a
visualização de ambientes industriais compostos por várias unidades fabris
interligadas, disponibilizando ao operador toda a informação necessária.
O InTouch é composto por diversos componentes que permitem
visualização, acesso a dados, integração com componentes e sistemas externos,
gestão e manutenção de históricos, tratamento de eventos e alarmes,
elaboração de relatórios e ferramentas de análise.
As aplicações desenvolvidas com o InTouch podem-se conectar aos
servidores via Internet através do protocolo standard HTTP, podendo
eventualmente utilizar dados e processar alarmes de vários servidores em
simultâneo. Utiliza o protocolo TCP.
4.5.1.2- IndustrialSQL Server
O IndustrialSQL Server é uma base de dados relacional que adquire e
armazena todo o histórico de um elevado número de dispositivos de controlo e
aquisição através do uso de servidores de I/O e de vários nós InTouch e
InControl.
Adicionalmente integra toda esta informação com dados de configuração,
mensagens de alarmes e eventos, dados estatísticos e outros dados associados
à produção.
78
PRH-ANP 16
RELATORIO FINAL
4.5.1.3- FactorySuite Web Server
O FactorySuite Web Server é a porta de acesso à informação do processo
produtivo que permite aos utilizadores, independentemente de se encontrarem a
utilizar dados no local, ou remotamente através da Internet, obter uma interface
idêntica.
O FactorySuite Web Server permite administrar e distribuir as aplicações
InTouch e a informação através da Internet/intranet.
O FactorySuite Web Server suporta a nível de segurança, o protocolo SSL
(Secure Socket Layer), a autenticação de senhas e o uso de certificados digitais,
além de restrições de leitura/escrita.
4.5.1.4- InControl
O InControl disponibiliza uma alternativa aos CP´s com custos mais
reduzidos. Comparado com os CP´s, o InControl, em execução num sistema
aberto, oferece um controle mais robusto, maior conectividade e capacidades
lógicas mais sofisticadas para o tratamento de processos complexos discretos e
em lote.
4.5.1.5- I/O Servers
Os I/O Servers permitem estabelecer comunicação entre os dispositivos
de hardware e o FactorySuite.
O FactorySuite disponibiliza vários servidores de I/O para interface com os
dispositivos instalados nas fábricas, permitindo efetuar conexões com, entre
outros, CP´s e RTU´s.
Existem diversos outros tipos de fabricantes que fornecem pacotes de
sistemas SCADA similares, como o sistema da Motorola com utilização de
MOSCAD (Motorola Scada).
79
PRH-ANP 16
RELATORIO FINAL
4.6- CONSIDERAÇÕES
Este capítulo apresentou a conceituação de sistemas SCADA na
supervisão e controle de variáveis de duto, bem como algumas características de
utilização e softwares. Pode-se perceber a importância de tal sistema no que se
diz respeito à modernização e automação de gasodutos já existentes e
aplicações em novas instalações que irão ser construídas. O sistema SCADA é
de fundamental importância na prevenção de falhas como vazamentos, para
evitar operações inadequadas de controle, juntamente com medições e
monitoramento das características em tempo real do sistema.
Pode-se perceber também uma sucinta vantagem na utilização de
sistemas SCADA agregados as unidades terminais remotas (RTU´s) para
aquisição de dados. Tanto quanto por sua característica de escalonamento de
tarefas quanto suas características de telecomando, tele-supervisão e telecontrole intrínsecas, sem necessidade de aquisição de sistemas adicionais.
80
PRH-ANP 16
RELATORIO FINAL
CAPITULO V
SIMULAÇÃO DE SISTEMAS DE CONTROLE E COMPRESSÃO EM
GASODUTOS
5.1 - INTRODUÇÃO
Nos últimos anos, a simulação computacional vem assumindo uma
importância cada vez maior como ferramenta de aquisição de conhecimento. No
inicio da pesquisa operacional, os problemas eram resolvidos por meio da
obtenção dos melhores resultados possíveis para cada parte individual do
modelo.
Porém, de maneira natural e acompanhando o desenvolvimento
tecnológico, ocorreu um aumento da complexidade dos problemas acarretando a
necessidade de se utilizar uma abordagem mais sistêmica e generalista. A
simulação utilizou-se, inicialmente, de linguagens de programação geral, como o
FORTRAN e PASCAL. Mas, à medida que a complexidade das observações e a
capacidade dos recursos computacionais cresceram, surgiram os programas de
simulação de propósito geral e que são os baseados em funções que
representam a dinâmica dos sistemas reais.
Atualmente existe uma gama de softwares comerciais que
possibilitam a simulação computacional de sistemas complexos. Muitos deles
são dedicados a determinada área do conhecimento, e muitas vezes a
aplicações bastante especificas.
Este capítulo tem como objetivo mostrar algumas das aplicações
que a simulação computacional permite quando aplicada ao sistema de controle
de um gasoduto.
81
PRH-ANP 16
RELATORIO FINAL
5.2 - SIMULAÇÃO COMPUTACIONAL
A simulação computacional tem se constituído numa ferramenta
poderosa para a compreensão dos fenômenos físicos, químicos e energéticos
em sistemas reais. A utilização desta ciência dentro da área de engenharia já
tem sua importância consolidada devido a sua extrema praticidade.
A concorrência nos mercados locais e internacionais tem levado as
empresas a tornarem-se cada vez mais competitivas e atentas as mudanças no
mercado, possibilitando-lhes melhorias em seus processos produtivos. A
simulação computacional foi utilizada, portanto, como ferramenta de análise das
possíveis oportunidades de melhorias a serem introduzidas em sistemas e
processos produtivos.
De maneira geral pode-se apontar alguns motivos que justificam o grande
investimento nesta área de pesquisa:
-
Simulações computacionais possibilitam uma estreita ligação entre a teoria
e a experiência. Simulações numéricas bem elaboradas podem conduzir a
melhorias do processo;
-
Não existe a necessidade de gerar modificações no meio físico para se
obter conclusões;
-
O universo acessível à simulação computacional não está limitado a
processos que ocorrem na natureza;
-
Possibilidade de simulação com quebras de simetria e efeitos não-lineares
incorporados;
O próprio gráfico da figura 1 apresentado no capitulo I é fruto da aplicação
computacional utilizando o software MATLAB e a equação de vazão em tubos
longos. Nesta simulação foi imaginada uma situação hipotética onde existe uma
longa tubulação somente com perdas de carga distribuída e sem inclinação.
82
PRH-ANP 16
RELATORIO FINAL
Boa parte das aplicações da simulação computacional é na solução
numérica de problemas. A grande velocidade de processamento pode ser
utilizada para fazer um numero de iterações por segundo, de forma que tal
característica aplicada a equações que regem o funcionamento do sistema,
pode-se gerar valores tão precisos quanto se queira.
Um dos problemas mais pesquisados e relevantes de engenharia, em
suas mais diversas áreas, é a modelagem e simulação dinâmica de sistemas.
Com o aumento da competitividade entre as empresas, um melhor desempenho
dinâmico dos sistemas toma uma grande relevância o sentido de que seu
entendimento possibilita uma análise capaz de diminuir perdas e aumentar a
eficiência e robustez do processo. Além disso, tal entendimento fornece maiores
informações sobre fenômenos que podem causar problemas.
5.3- SIMULAÇÃO DA COMPRESSÃO DE GAS NATURAL
Um exemplo simples de simulação computacional foi implementado em
um programa com MATLAB de maneira a se permitir o calculo do head
termodinâmico, além do head real e a eficiência termodinâmica. Este programa
lançou mão das equações (1.11), (1.12) e (1.13) citadas durante o capitulo I.
% PROGRAMA PARA CALCULO DE HEAD POLITROPICO
disp('Entre com os dados do sistema');
MW = input ('Entre com o Peso Molecular= ');
P1 = input ('Entre com Pressao Sucçao= ');
T1 = input ('Entre com Temp entrada= ');
P2 = input ('Entre com Pressao de descarga= ');
T2 = input ('Entre com Temp de saida= ');
R = input ('Entre com R= ');
k = input ('Entre com coef adiabatico= ');
83
PRH-ANP 16
RELATORIO FINAL
% Calculo do Head Politropico, real e eficiencia
quo = log(T2/T1)/log(P2/P1)
% (n-1)/n
Hp = (1/(quo*MW))*R*T1*[((P2/P1)^quo)-1]
H = (T2-T1)*R*k/((k-1)*MW)
ep = Hp/H
% FIM
Tal aplicação possibilita a calculo automático dos valores a partir da
entrada das temperaturas e pressões de sucção e de entrada, além das
características
do
gás
natural.
Desta
maneira,
poderíamos
facilmente
implementar uma rotina de forma a que estes dados fossem lidos de um arquivo
com dados seqüenciais, e assim realizar uma análise seqüencial dos resultados.
Como já foi dito anteriormente, estes dados inseridos podem ou não ser
oriundos do processo real. As mais variadas combinações de dados podem ser
montadas de forma a analisar o head e a eficiência em condições de
extranormalidade.
Em uma outra situação, tem-se posse de uma curva para uma
determinada rotação de um compressor de uma estação de compressão de gás
natural similar o apresentado no capitulo II. Deseja-se então a expansão desta
curva para outras
Através da utilização do software MATLAB, foi feito um programa que
possibilita o traçado de curvas no plano Vazão X Head Politrópico referentes a
um compressor exposto a um controle de capacidade tipo variação de rotação do
compressor.
Foi utilizada para isto uma curva de performance termodinâmica como
base de um compressor real Solar C452 retirada do catalogo do fabricante. É
importante notar que esta curva esta utilizando a base isentrópica.
84
PRH-ANP 16
RELATORIO FINAL
Figura 23: Curva termodinâmica do compressor Solar C452
Analisando a curva básica do compressor, verifica-se que a curva de head
isentrópico possui em sua característica um ponto de inflexão máximo separando
a curva em duas, uma praticamente linear em um trecho de variação de vazão e
uma levemente parabólica para um segundo trecho de vazão. Sendo que a
interseção entre as duas curvas se dá o ponto de head máximo. Neste caso, se
torna impossível à análise desta curva de uma maneira generalista através de
uma só equação.
Os modelos das curvas serão tratados independentemente através do
modelo do compressor descrito na equação (2.1), de forma a conseguirmos uma
formulação que permita o modelamento deste tipo especifico de compressor.
Para este programa devem ser capturados alguns pontos da curva de
operação do compressor em questão, pois são necessários para a composição
da curva básica e da definição dos parâmetros e das constantes do modelo.
Também é necessário é o conhecimento da rotação referente à curva inicial.
85
PRH-ANP 16
%
PROGRAMA
RELATORIO FINAL
PARA
CALCULO
DAS
CURVAS
DE
OPERAÇAO
DE
COMPRESSOR
disp('Entre com os dados da curva');
pt1 = input ('Entre com vo ponto 1= ');
pt2 = input ('Entre com vo ponto 2= ');
pt3 = input ('Entre com vo ponto 3= ');
pt4 = input ('Entre com vo ponto 4= ');
ptmax= input ('Entre com o ponto de maximo Head= ');
N = input ('Entre com a velocidade de rotaçao do grafico base= ');
Q1 = input ('Entre com a vazao minima do graf A= ');
Q2 = input ('Entre com a vazao max do graf A= ');
Q3 = input ('Entre com a vazao min do graf B= ');
Q4 = input('Entre com a vazao max do graf B= ');
% Calculo das constantes
Ya=[N^2 N*pt1(1) pt1(1)^2;N^2 N*pt2(1) pt2(1)^2;N^2 N*ptmax(1) ptmax(1)^2];
Xa=[pt1(2);pt2(2);ptmax(2)];
ABCa=Ya\Xa;
Aa=ABCa(1);
Ba=ABCa(2);
Ca=ABCa(3);
Yb=[N^2 N*ptmax(1) ptmax(1)^2;N^2 N*pt3(1) pt3(1)^2;N^2 N*pt4(1) pt4(1)^2];
Xb=[ptmax(2);pt3(2);pt4(2)];
ABCb=Yb\Xb;
Ab=ABCb(1);
Bb=ABCb(2);
Cb=ABCb(3);
disp(ABCa);
disp(ABCb);
% Modelo do compressor
Vea=[Q1:1:Q2];
Veb=[Q3:1:Q4];
Hfa=Ca*(Vea.^2)+ Ba*Vea.*N + Aa*(N^2);
Hfb=Cb*(Veb.^2)+ Bb*Veb.*N + Ab*(N^2);
plot(Vea,Hfa,Veb,Hfb);
grid;
86
PRH-ANP 16
RELATORIO FINAL
xlabel ('Vazao volumetrica [m3/s]');
ylabel ('Head termodinamico isentropico [KJ/Kg]');
% Nova rotaçao de trabalho
N2 = input ('Entre com a nova rotaçao= ');
Hfa=Ca*(Vea.^2)+ Ba*Vea.*N2 + Aa*(N2^2);
Hfb=Cb*(Veb.^2)+ Bb*Veb.*N2 + Ab*(N2^2);
plot(Vea,Hfa,Veb,Hfb);
grid;
xlabel ('Vazao volumetrica [m3/s]');
ylabel ('Head termodinamico isentropico [KJ/Kg]');
%FIM
Como resultado deste programa, obtém-se um gráfico aproximado das
condições de head por vazão do compressor na sua situação original.
Logicamente de acordo com a exatidão dos pontos inseridos, o gráfico resultante
ficará mais ou menos próximo do real.
Para a confecção deste programa foi fundamental a capacidade do
MATLAB de resolver sistemas lineares de maneira direta e fácil. Em outro
software de programação tradicional, este trabalho necessitaria da construção de
uma rotina para resolução numérica através de métodos como, por exemplo,
Gauss-Seidel.
Neste gráfico, pode-se inserir uma nova rotação, sendo que o programa
adaptará o modelo para a referida rotação. Os gráficos abaixo foram obtidos
para um compressor cuja curva segue o molde da curva do compressor solar C452 a uma rotação inicial de 10000 RPM.
87
PRH-ANP 16
RELATORIO FINAL
Figura 24: Curva de compressor aproximada obtida através de modelo.
O segundo gráfico se dá para uma situação onde o controle de
capacidade atuou diminuindo a rotação para 8000 RPM.
Figura 25: Curva de compressor aproximada para 8000 RPM.
88
PRH-ANP 16
RELATORIO FINAL
Desta forma então fica fácil notar a possibilidade de se formar uma
família de curvas, de modo a analisar as características resultantes da variação
de velocidade de rotação de um compressor em um gasoduto a comparar com o
head termodinâmico e a vazão volumétrica.
O resultado obtido em comparado com a curva real é bastante
satisfatório, demonstrando que o modelo é adequado, bastando como dados de
entrada apenas o conhecimento de alguns pontos de operação da unidade.
5.4 - SIMULAÇÃO DO CONTROLE
O controlador utilizado no controle de capacidade dos compressores
centrífugos deve possuir a ação integral como já foi salientado no capitulo II.
Utilizando o software Simulink do pacote MATLAB, foi possível a realização de
uma simulação hipotética de um sistema de controle de capacidade através da
variação da rotação de um sistema de compressão de um gasoduto.
Desta forma, foi possível a construção de um modelo que implementasse
a dinâmica de um sistema proporcional integral aplicada por um controlador tipo
CP de forma discreta. A dinâmica do sistema do compressor e da turbina não
foram consideradas como sendo ganhos estáticos.
Neste caso, a metodologia encontrada para a simulação foi à aplicação
da equação de head termodinâmico (1.11), porém aplicada de forma
referenciada a um sistema adiabático. E da equação de modelo estático do
compressor (2.1), tomando como parâmetros, aqueles obtidos através do
programa anterior (para o compressor base já citado).
A saída do controlador PI é a própria informação de comando da rotação
da turbina e do compressor centrífugo, de modo que esta varia de acordo com o
erro de pressão.
O diagrama de blocos do simulink representativo do sistema ficou desta
forma:
89
PRH-ANP 16
RELATORIO FINAL
Figura 26: Simulação do controle de capacidade de um compressor centrífugo por variação da rotação.
Nesta simulação, foi tomado também que a variável de controle seria a
pressão de descarga do compressor. Além disso, as condições de vazão
volumétrica de sucção, pressão de entrada, característica do gás ou temperatura
de entrada foram fixadas utilizando valores típicos para uma estação de
compressão podendo, entretanto podem ser variadas no modelo do compressor.
Foram estipulados valores arbitrários através da simulação que
possibilitassem uma melhor visualização das condições do sistema. O ganho
derivativo foi colocado neste caso como zero, para a situação apenas do PI.
As variáveis monitoradas foram à rotação do compressor, o erro obtido e
a saída de pressão de descarga. O resultado da pressão de saída está ilustrado
na figura a seguir.
90
PRH-ANP 16
RELATORIO FINAL
Figura 27: Pressão de descarga do compressor compensada.
Pode-se verificar no gráfico que o sistema se estabiliza rapidamente na
pressão de set-point desejado. No tempo igual a 3s foi simulado uma variação da
pressão de descarga em degrau ocorrida devido alguma manobra no sistema.
Percebe-se o controlador assim que percebe a variação de pressão atua no
sentido de compensa-la.
Da mesma forma, pode se verificar que a rotação da turbina é
incrementada pelo controlador de modo a possibilitar o fornecimento de tal
pressão de descarga. O seu perfil pode ser obtido através da simulação
representada pela Fig. 28.
91
PRH-ANP 16
RELATORIO FINAL
Figura 28: Variação de rotação devido a degrau da pressão de descarga.
Após isso foi considerado como distúrbio um sinal de variação de
pressão repetitivo, de forma a verificar a ação do controlador em tal situação. As
variações eram do tipo rampa linear de 0 a 15 bar em 500ms e caindo
abruptamente para zero neste tempo.O resultado de pressão de descarga obtido
foi:
Figura 29: Pressão de descarga para regime de distúrbio seqüencial.
92
PRH-ANP 16
RELATORIO FINAL
Foi possível verificar que o controle mesmo em uma condição extrema
de variação tende a manter a pressão próxima de um limite pré-estabelecido.
5.5 - SOFTWARES DEDICADOS
Existem alguns softwares que possuem o objetivo especifico de
simulação computacional de gasodutos. Alguns deles são:
o Pipeline Studio;
o PIPESIM;
o FlowTran;
o ATMOS Gsim;
Estes softwares possuem vários modelos embutidos na forma de
elementos, de modo a que o sistema em questão pode ser facilmente
implementado pelo usuário (Fig. 30). Possibilitam a simulação de dutos em
condições de operação ou não, podendo construir gradientes de pressão,
temperatura, vazão etc.
Figura 30: Tela do software Pipeline Studio da Energy Solutions.
93
PRH-ANP 16
RELATORIO FINAL
Alguns softwares permitem interligação com o sistema SCADA e podem
trabalhar on-line ou off-line, ou seja, possibilitam a utilização das próprias
variáveis do sistema real, fornecendo resultados bem mais precisos.
Por
exemplo, o software da Atmos , o Gsim, possui esta característica.
Geralmente
estes
softwares
possuem
funções
adicionais
já
implementadas como a simulação do lançamento de pig´s e também simulam
condições de anomalia como em caso de vazamentos.
5.6 - CONSIDERAÇÕES FINAIS
Através deste trabalho foi possível efetuar a análise dos aspectos técnicos
de um sistema de transporte de gás de forma geral. O conteúdo teórico obtido
através da pesquisa bibliográfica possibilitou um ganho extremamente
considerável no sentido de possibilitar um trabalho que reunisse uma gama de
informações de modo a possibilitar a análise sobre a técnica de funcionamento
de um gasoduto.
Foi analisado o aspecto construtivo dos componentes da linha, levantando
a forma de que estes interagem com o sistema, levantando as equações que
regem o seu funcionamento, possibilitando o calculo de variáveis importantes
para o funcionamento do gasoduto (como head termodinâmico e rotação de
trabalho).
Uma análise das estratégias de controle de pressão e vazão de um
gasoduto foi efetuada de modo a explicitar a maneira energeticamente mais
eficiente
evitando
perdas
desnecessárias.
Foram
apontadas
futuras
possibilidades de melhoria do sistema com a evolução tecnológica, como é o
caso da utilização de motores elétricos como máquinas primárias dos
compressores centrífugos de estações de compressão, através do uso de
inversores de freqüência de grande porte. A conceituação dos limites operativos
do sistema, surge e stonewall, foram efetuadas, mostrando que se ultrapassados
poderiam acarretar um colapso do sistema.
94
PRH-ANP 16
RELATORIO FINAL
Os equipamentos que efetuam o processamento de controle e supervisão,
e suas referentes arquiteturas foram descritos objetivando uma possibilidade de
escolha por um modelo mais adequado.
Foi mostrado que novas tecnologias como o FISCO e sensoriamento
inteligente, junto com a utilização de controladores programáveis são relevantes
por sua robustez e confiabilidade, e são muito utilizadas pela maioria dos
projetistas.
A descrição dos aspectos técnicos de um sistema SCADA de supervisão e
controle possibilitou explicitar sua relevância dentro do sistema, com suas
características telemétricas e operacionais, além de possibilitar o entendimento
necessário para sua aplicação em novas instalações de transporte de Gás
Natural.
Foi ainda ressaltada a importância da simulação computacional para este
tipo de aplicação, com a construção de pequenas rotinas capazes de fornecer
resultados importantes para análise do funcionamento da linha.
Toda a análise baseou-se em um sistema típico, porém os conceitos e
dados aqui obtidos podem ser expandidos a linhas de diferentes portes,
provendo assim uma fonte de conhecimento tanto para novas aplicações, quanto
para modernização de antigas e obsoletas linhas de transporte de Gás Natural.
95
PRH-ANP 16
RELATORIO FINAL
BIBLIOGRAFIA
[1]- Gas Engineering Handbook,1965. Industrial Press.
[2]- Soares, Joshuah.M.A, 1981 .Fordham University, New York. Manual de
pneumática e hidráulica.
[3]- Costa, Ennio, 1978. Edgard Blücher Ltda. Compressores.
[4]- Rodrigues, Paulo Sergio, 1991. Compressores industriais. Editora EDC.
[5]- Santos , José Horta, 1979. Automação Industrial. Rio de Janeiro.
[6]- Boyce, Meherwan P, 1995. A Gás turbine Engineering handbook. Gulf
Publishing Company.
[7]- Bortoni, Edson C, 2002. Apostila Instrumentação. IEE.Unifei.
[8]- Ogata, Katsuhiko, 1997. Modern Control Engineering. Minnesota – USA: Ed.
Prentice-Hall, Inc. Tradução: Severo, Bernardo, 2000. Engenharia de Controle
Moderno. Rio de Janeiro - Ed. LTC. Instituto Militar de
Engenharia, IME.
[9]- Gordon, Geoffrey, 1969. System simulation. Ed. Prentice-Hall,Inc.
[10]- Bezerra, Rossini, 2000. Apostila Instrumentação de processos.
[11]- UFRJ. Programa Prodenge. Controladores Lógicos Programáveis.
ARTIGOS
[12]- Wrenn jr., Frederick. Eletric Powered Compressors.
96
PRH-ANP 16
RELATORIO FINAL
[13]- Alonso, Julio. Controle & Instrumentação. 2004.
[14]- Cassiolato, Cesar. Smar. Controle &Instrumentação. 2004
97
Baixar