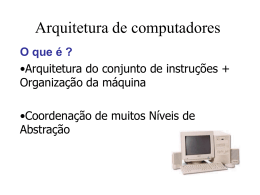
V - Organização de Computadores
E
sta disciplina consiste no estudo dos componentes físicos que compõem o
computador, cuja configuração básica e mais geral pode ser vista como na
figura V.1 abaixo.
Disp E
Memória
Disp S
dados
instruções
UCP
UAL
Sinais de
Controle e
Status
UC
Figura V.1 - Organização de um Computador
onde, por definição, considera-se:
• computador - como sendo uma máquina eletrônica, capaz de solucionar problemas
através da execução automática de instruções que lhe sejam previamente fornecidas.
• hardware - constituído pelos circuitos eletrônicos que compõem o computador e
que o tornam capaz de reconhecer e executar um conjunto limitado de instruções
simples.
• software - constituído pelo conjunto de programas necessários para tornar o hardware útil e operacional.
• programa - como sendo uma peça de software constituída por uma seqüência de
instruções que descrevem ao computador como executar uma determinada tarefa.
• linguagem de máquina - constituída pelo conjunto básico de instruções que são reconhecidas pelo hardware e, para a qual todo programa precisa ser convertido para
que possa ser executado.
• tradutor - um programa que converte outros programas para a linguagem de máquina. Pode ser de três tipos: montador (para a linguagem assembly), interpretador
(tradução e execução passo a passo) e compilador (tradução e execução em fases
distintas).
V.1 Máquina Virtual
Constitui-se de uma abstração onde, dentro de um único computador hospedeiro, o
universo gerado por cada linguagem define uma máquina hipotética (virtual) capaz de reconhecer e executar diretamente as instruções daquela linguagem. É a generalização do conceito
de hardware.
Organização de Computadores
2
Vantagens desta abordagem:
1. Um computador pode ser considerado como composto por "n" máquinas virtuais, cada
uma delas com sua própria configuração e linguagem de máquina;
2. Uma pessoa, cujo trabalho seja gerar programas (aplicativos) para a máquina virtual de nível "k" ou outro qualquer, não precisa conhecer ou se preocupar com as particularidades dos
níveis inferiores ao seu;
3. A estrutura de níveis permite ver o computador como um conjunto hierárquico de facilidades que possibilitam flexibilidade e independência ao usuário.
" As linguagens de 4a geração - orientadas a objeto, com interfaces gráficas e super
amigáveis derrubou o mistério e abriu as portas do computador ao usuário leigo e
ao público em geral."
Máquina Virtual Mn
Ling Máq - Ln
Máquina Virtual M1
Ling Máq - L1
Programas em Ln são interpretados e traduzidos por um
interpretador residente na
máquina Mn-1
Programas em L0 são interpretados e executados diretamente pelo hardware do
computador
Máquina Virtual M0
Ling Máq - L0
Figura V.2 - Máquina Virtual
O Modelo Multinível Contemporâneo
A maioria dos computadores modernos possui dois ou mais níveis, sendo que máquinas
com seis ou mais níveis são cada vez mais comuns. Tais níveis se subdividem basicamente em
Hardware, Firmware, Software Básico, Utilitários e Softwares Aplicativos. A figura V.3 abaixo, descreve um computador hipotético composto por 6 níveis, a saber:
nível 0 - Lógica Digital
• constitui o hardware do computador. O advento dos microprocessadores (pastilhas
VLSI) e dos microcomputadores têm despertado o interesse e aberto, cada vez
mais, o mundo da lógica digital aos profissionais de informática e ao público em geral.
• no nível 0 encontram-se: os circuitos eletrônicos (cap. IV) e os diversos sistemas
(módulos) que compõem o computador: UCP, memória, dispositivos de E/S, dispositivos de comunicação e interfaces.
• o nível 0 executa diretamente as instruções (ou microinstruções) submetidas pelo
nível 1.
Organização de Computadores
3
Máquina Virtual M5
Orientada ao Prob.
Ling. Alto Nível
tradução (compilador)
Software
Aplicativo
Máquina Virtual M4
Ling de Montagem
Ling. Baixo Nível
(assembly)
tradução (montador)
Software
Básico e
Utilitários
Máquina Virtual M3
Sistema Operacional
interpretação parcial (SO)
Máquina Virtual M2
Máq. Convencional
interpretação (microprograma)
Firmware
Máquina Virtual M1
Microprogramação
execução pelo hardware
Hardware
Máquina Virtual M0
Lógica Digital
Figura V.3 - Modelo Multinível
nível 1 - Microprogramação
• é o verdadeiro nível de linguagem de máquina. O microprograma, residente em
memória permanente (ROM), compõe o que é conhecido por firmware e tem por
função interpretar e traduzir as instruções que lhe são submetidas pelos níveis superiores.
• nem todas as máquinas possuem este nível, veja as máquinas RISC por exemplo.
Nas máquinas não microprogramadas, o nível 2, chamado de máquina convencional, é diretamente executado pelo hardware.
• as vantagens da microprogramação são:
a) facilitar o projeto e a construção dos circuitos digitais, através da implementação de parte da lógica digital dentro do firmware;
b) flexibilizar e possibilitar o desenvolvimento de instruções mais potentes a
nível de máquina convencional.
• o conjunto de microinstruções é geralmente pequeno, no entorno de duas ou três
dezenas, sendo que a maior parte delas envolvendo a movimentação de dados de
uma parte da máquina para outra, ou a realização de alguns testes simples.
• um mesmo computador pode suportar mais de um microprograma, cada um definindo uma máquina virtual de nível 1 diferente.
Organização de Computadores
4
• o microprograma, escrito pelo microprogramador e armazenado em uma memória
não volátil, tem como função interpretar (buscar, examinar e executar) cada uma
das instruções de um programa em nível de máquina convencional. Para isto, o microprograma deve acessar e controlar todos os recursos de hardware (registradores, barramentos, ULAs, memórias e outros).
• as microinstruções são compostas apenas por sinais de controle e o microprograma
é executado por um dispositivo chamado sequenciador que, juntamente com os
demais circuitos de hardware, compõe a microarquitetura.
• um dos pontos de projeto da microarquitetura é a definição da largura das microinstruções ou seja, da memória do microprograma, isto é, da micromemória.
Projetos do tipo horizontal fazem uso de um número relativamente pequeno de
microinstruções largas, e os do tipo vertical muitas microinstruções estreitas.
• outra opção de projeto é a adoção da nanoprogramação, que consiste basicamente na adoção de uma terceira memória, a nanomemória, para armazenar as instruções do nanoprograma.
• com a nanoprogramação a microarquitetura fica composta da memória principal,
volátil, que armazena o programa em execução, a micromemória, não volátil, que
armazena o microprograma e a nanomemória, também não volátil, que armazena o
nanoprograma, veja figura V.4.
• a nanoprogramação se constitui na realidade, de um artifício para reduzir o tamanho do microprograma naqueles casos em que ocorra muitas repetições de uma ou
mais microinstruções. O nanoprograma passa a conter o conjunto das microinstruções usadas no microprograma, armazenados sem repetição, e o microprograma
matém a lógica original usando não mais as microinstruções propriamente ditas mas
seus endereços na nanomemória.
Log2m
W bits
microprograma
(b)
microprograma
n
W bits
(a)
nanoprograma
m
Figura V.4 - Microprogramação convencional (a) e nanoprogramação (b)
(*) Observe na figura que, na microprogramação convencional o tamanho gasto para armazenar o microprograma é de "n x w" (número de instruções multiplicado pela largura em bits de
cada microinstrução) e na nanoprogramação é de "n x log2m + m x w" (número de microinstruções multiplicado pelo logaritmo na base dois do tamanho da memória de nanoprogramação
somado ao tamanho da memória de nanoprogramação.
nível 2 - Máquina Convencional
Organização de Computadores
5
• é, na verdade, a "máquina" vendida ao usuário genérico. Suas características técnicas, operacionais e funcionais são fornecidas através dos manuais de referência,
comercializados junto com o equipamento.
• é o nível onde reside o "kernel" do sistema operacional, que interpreta os utilitários,
a linguagem de controle e as rotinas que residem no nível 3.
• o SO pode ser interpretado pelo microprograma ou executado diretamente pelo
hardware, naquelas máquinas desprovidas do nível 1.
nível 3 - Sistema Operacional
• é o nível em que o usuário interage diretamente (através do uso de utilitários e da
linguagem de controle) ou indiretamente (através de programas aplicativos desenvolvidos em máquinas de níveis superiores).
• o windows 3.1, por exemplo, é uma máquina virtual colocada acima deste nível e
cuja finalidade é proporcionar ao usuário uma interface mais amigável e de mais fácil assimilação.
• é geralmente, um nível híbrido, onde parte de suas instruções são interpretadas pelo
"kernel" do SO (nível 2) e parte são interpretadas diretamente pelo microprograma
(nível 1).
nível 4 - Linguagem de Montagem
• é genericamente chamada de assembly, embora cada máquina tenha seu próprio assembly, e é traduzida para o nível inferior pelo montador, comumente chamado de
assembler.
• o assembly já foi muito importante em épocas passadas, porém hoje é totalmente
suplantado pelas linguagens de alto nível para o desenvolvimento de programas
aplicativos e até utilitários.
nível 5 - Linguagens Orientadas para o Problema
• consiste em diferentes máquinas virtuais, cada uma definida pelo ambiente criado
por sua linguagem de programação de alto nível.
• as linguagens de alto nível são mais complexas que o assembly e requerem tradutores mais bem elaborados e potentes dos tipos interpretadores e compiladores.
• nível 6 e superiores
• constituído por sistemas projetados para criar "shells" - máquinas virtuais especialmente adequadas para certas aplicações, como por exemplo o word, o access, o excel, o lotus, etc.
Em resumo, os computadores modernos são constituídos de uma série hierárquica de
máquinas virtuais, cada uma projetada e construída sobre suas predecessoras. Cada nível representa um grau distinto de abstração, com a presença de diferentes recursos e operações; o
que possibilita, através da supressão de detalhes irrelevantes, tornar o computador mais amigável e mais fácil de ser compreendido pelo público em geral.
Na estrutura de um PC, por exemplo, conforme pode ser visto na figura V.5 abaixo, 4
níveis virtuais podem ser considerados: o dos programas aplicativos, o do sistema operacional,
Organização de Computadores
6
o dos programas de interface com os dispositivos periféricos (drivers) e as rotinas de entrada e
saída padrão fornecidas pela BIOS. Observe que a segurança pode ser afetada uma vez que
qualquer dos níveis pode realizar acesso direto às rotinas da BIOS e, portanto, sem se submeter aos critérios e procedimentos de proteção.
Programas Aplicativos
SO - residente
Drivers
ROM BIOS Device Drivers
Figura V.5 - Estrutura do MS-DOS
V.2 A Unidade Central de Processamento (UCP)
A Unidade Central de Processamento - UCP, é o "cérebro" do computador, e sua função é executar os programas armazenados na memória principal, buscando instruções e executando-as uma após a outra.
Na figura V.6 abaixo, pode ser visto um esquema simplificado da organização interna
do hardware. Observe que a UCP faz uso de um barramento para se comunicar com os demais
componentes do sistema, como a memória principal e os demais dispositivos periféricos que
compõem o computador. Este barramento é constituído por diversas vias paralelas por onde
transitam os sinais.
Grupos distintos destas vias, na prática, configuram diferentes barramentos, tais como
o de dados, o de endereços e o de sinais de controle. O número de vias utilizado em cada um
destes barramentos depende das características físicas de projeto do computador.
UCP
UC
Periféricos de E/S
UAL
MP
HD
REGs
Barramento (dados + endereços + controle)
Figura V.6 - Organização do Hardware
IMP
Organização de Computadores
7
As principais considerações de projeto de um barramento, além do número de vias,
são: a temporização, o mecanismo de arbitragem, o tratamento de interrupções e o tratamento
de erros.
Quanto a temporização, um barramento pode ser do tipo síncrono ou do tipo assíncrono. Num barramento síncrono existe um relógio temporizador que define a freqüência de
operação do mesmo, chamada de ciclo de barramento. Neste tipo de barramento, toda atividade ou operação de transferência é alinhada, ou seja, sincronizada com a freqüência do barramento e sempre consome um número inteiro e conhecido destes ciclos. No barramento assíncrono não existe tal relógio, ou seja, os ciclos são variáveis e podem tomar a duração que for
requerida pela operação.
Na figura V.7a, por exemplo, é mostrado um barramento síncrono com um relógio de
temporização de 5Mz, que produz um ciclo de 200ns, e uma operação de leitura de um byte da
MP que consome 4 ciclos de barramento, ou seja, 800ns. Observe o sinal do relógio definindo
o ciclo do barramento, os sinais de controle RD e MREQ definindo respectivamente a operação a ser realizada, leitura, e a requisição de uma operação de memória. O barramento de endereços disponibiliza para a MP a posição a ser lida, durante um determinado número de ciclos
de barramento. Posteriormente a MP coloca no barramento de dados o conteúdo lido e a UCP,
após um número prefixado de ciclos de barramento sabe que pode buscar o dado que estará
estável e disponível no barramento.
No barramento assíncrono, face a inexistência do relógio para disciplinar a transferência, é introduzido um processo de sinalização, conhecido por handshake, entre a UCP e o
dispositivo envolvido na operação. Na figura V.7b, o handshake é representado pelos sinais
MSYN - Master Synchronism (sincronismo mestre) e SSYN - Slave Synchronism (sincronismo
escravo). Observe que em resposta ao MSYN a MP coloca o dado no barramento e responde
ao mestre ativando o sinal SSYN, que informa o cumprimento da missão.
Os barramentos assíncronos apresentam maior flexibilidade de uso e oferecem vantagens para atendimento a um conjunto heterogêneo de dispositivos (lentos e rápidos), uma vez
que seus ciclos não são fixos. Por outro lado, um sistema síncrono é mais fácil de ser construído e oferece maior velocidade de operação. A maioria dos barramentos é síncrona.
Mecanismos de arbitragem tem a ver com a forma como um dispositivo se torna mestre
do barramento. Pode ser centralizado, onde um único árbitro, decide quem será o próximo a
controlar o barramento, ou descentralizado, quando não há árbitro e sim um procedimento
distribuído e observado por todos os candidatos a mestre. Sempre que a UCP compete pelo
barramento ela o faz com menor prioridade, para evitar que dispositivos de E/S mais lentos
fiquem prejudicados no acesso a condição de mestre.
Uma vez que múltiplos dispositivos podem querer causar uma interrupção simultaneamente, o mesmo tipo de problemas de arbitragem está presente e a solução usual é assinalar
prioridades aos dispositivos e usar um árbitro para controlar o problema.
A organização interna da UCP varia em função do grau de sofisticação e avanço tecnológico do hardware. Sua organização genérica básica é constituída pela UC - Unidade de
Controle, pela UAL - Unidade Aritmética e Lógica e por um banco de registrados.
Organização de Computadores
T1
8
T2
T3
T4
Endereço da Posição de Memória
Dado
MREQ
RD
tempo
(a)
Endereço da Posição de Memória
MREQ
RD
MSYN
Dado
SSYN
(b)
tem-
Figura V.7 - Barramento Síncrono (a) e Barramento Assíncrono (b)
A UC é a parte encarregada de executar as operações de controle do ciclo de instrução
e de sinalização para todos os demais componentes do sistema. A ULA se encarrega da execução de todas as operações aritméticas e lógicas decorrentes da execução dos programas. O
banco de registradores serve de memória local para armazenamento dos dados em uso na
UCP. A figura V.8 abaixo mostra o esquema da organização interna de uma UCP básica, onde:
• barramentos
• o barramento interno é a via de comunicação entre os componentes internos da
UCP.
• o data bus é o barramento para transferência de dados entre a UCP e os demais
componentes (8, 16 e 32 bits são os mais comuns).
• address bus é o barramento para endereçamento de memória (10 bits - 1Kb, 20 bits
- 1 Mb, 32 bits - 4Gb).
• registradores de controle e de estado
• MBR - Memory Buffer Register, (RDM em português) serve de armazenamento
temporário de dados no caminho de/para a MP.
Organização de Computadores
9
• MAR - Memory Address Register, (REM em português) serve para armazenamento temporário do endereço do dado a ser lido ou gravado na memória.
• I/O BR - serve de armazenamento temporário de dados no caminho de/para dispositivos de E/S.
• I/O AR - serve para especificar um determinado dispositivo de E/S.
• IR - Instruction Register, registrador para armazenamento da instrução corrente.
• PC - Program Counter, registrador que contém o endereço da próxima instrução a
ser executada.
• PSW - Program Status Word, que contém informações sobre o estado do processamento, tais como: sign (sinal), zero, carry (vai um ou vem um), equal, overflow
(estouro), interrupt enable/disable (habilitação ou não de interrupção) e supervisor
(modo de execução).
• registradores de dados
• AC - Accumulator, registrador que, no caso apresentado na figura, armazena uma
das entradas da ULA.
• TR - Temporary Register
• registradores de uso genérico
• registradores para endereçamento
• SP - Stack Pointer
• SX - Segment Pointer
• IX - Index Register
I/O AR
data bus
address bus
MBR
MAR
I/O BR
barramento interno
AC
TR
IR
UC
ULA
Decodifcador de
Instrução e
Controlador do
Ciclo de Máquina
PC
R1
sinais de controle
Figura V.8 - Organização interna da UCP
a. O Ciclo de Instrução
A UCP executa cada instrução através de uma seqüência de pequenos passos conforme
a seguir:
• FETCH (busca)
a) recupera da MP a próxima instrução a ser executada, isto é, a instrução
apontada pelo PC e a armazena no registrador instrução IR.
b) atualiza o PC para que aponte para a próxima instrução a ser executada.
• DECODE (decodificação)
c) interpreta a instrução armazenada em IR.
• DATA FETCH (busca dos operandos)
Organização de Computadores
10
d) se a instrução necessitar de dados armazenados na memória, calcula o endereço dos mesmos e,
e) recupera-os armazenando nos registradores internos.
• EXECUTION (execução)
f) executa a instrução (aritmética, lógica ou desvio)
• WRITE BACK (salva o resultado)
g) salva o resultado na MP ou em um dos registradores internos e,
h) retorna ao primeiro passo.
V.3 A Memória Principal
É o dispositivo onde são armazenados os programas e os dados de uso corrente. É organizada segundo uma matriz de células, cada uma podendo armazenar um determinado número de bits (8 / 16 / 32 / ...).
Cada célula de memória é identificada por um endereço único e imutável. O acesso é
aleatório e o tempo de acesso é o mesmo para qualquer célula, que também representa a unidade de acesso à memória (menor quantidade de bits que pode ser lida ou gravada).
a. Conexão UCP x MP
UCP
M
A
R
Address Bus
M
B
R
Data Bus
MP
R/W bit
MREQ bit
Figura V.9 - Conexão UCP x MP
onde,
R/W bit
⇒
especifica se a operação é de leitura "R" ou de escrita "W".
MREQ bit ⇒ Memory REQuest, especifica uma ordem de acesso à memória emitida pela
UCP.
b. Tipos de Memória
• volátil - perde o conteúdo armazenado quando não energizada. (RAM - Random
Access Memory).
∗ tipos de RAM
a) Estática - a gravação é estável, só se alterando através de operações de escrita (consome mais energia);
b) Dinâmica - a gravação do bit "1" se descarrega com o tempo, precisando
ser "refrescada" periodicamente (ciclo de refresh).
• não volátil - não perde o conteúdo armazenado. (ROM, PROM, EPROM, EEPROM)
Organização de Computadores
11
c) ROM - Read Only Memory (gravada de fábrica - permanente);
d) PROM - Programable ROM (pode ser gravada uma única vez pelo usuário,
através de equipamentos especiais);
e) EPROM - Erasable PROM (pode ser apagada através de raios ultravioletas);
f) EEPROM - Electrical EPROM (pode ser apagada através de sinais elétricos);
g) Memória Flash - é uma memória que pode ser utilizada como apenas de
leitura ou como de leitura e gravação, dependendo do driver utilizado. Geralmente é utilizada como um disco em pastilhas (chips), SSD - Solid State
Disk.
c. Endereçamento de Memória
É realizado por lógica combinacional (cap. IV), onde os bits de endereçamento mais o
sinal R/W habilitam a leitura ou gravação de uma única ou de um conjunto de células de cada
vez, dependendo do tamanho do barramento de dados.
d. Ordem dos Bytes
A ordem em que os bytes são considerados dentro da célula é completamente transparente ao usuário, mas é de fundamental importância quanto à compatibilidade de sistemas e
transportabilidade dos dados.
A ordem pode ser do tipo big endian (da esquerda para a direita), usado pelos processadores Motorola, ou little endian (da direita para a esquerda), característico dos processadores Intel.
A figura V.10 mostra um problema de transportabilidade de dados entre uma máquina
little endian (PC486) e uma big endian (SPARC Station). Observe que a simples inversão dos
dados não soluciona o problema.
Byte número
3
2
1
0
0
0
0
5
Y R A M
(a)
Byte número
0
1
2
3
5
0
0
0
M A R Y
(b)
Byte número
0
1
2
3
0
0
0
5
Y R A M
(c)
Figura V.10 - (a) mensagem original no 486 - little endian, (b) mensagem após ser recebida
pela SPARC - big endian, (c) mensagem após ser invertida (observe que a inversão pura corrige o valor numérico porém inverte o alfanumérico)
e. Detecção e Correção de Erros
Os sistemas de detecção e correção de erros são implementados de forma a aumentar a
confiabilidade do armazenamento e da transferência de dados entre os diversos componentes
do computador.
Detecção Simples
Organização de Computadores
12
Técnicas
Detecção e Correção
a) Detecção Simples
Apenas detecta o erro, provocando procedimentos de regravação do dado, de mensagem de erro na recuperação de um dado gravado ou, no caso de transmissão de dados, de sua
retransmissão.
Um método simples, porém largamente utilizado é o da adição de um bit de paridade
(VRC - Vertical Redundancy Checking) ao código base do caracter.
par
⇒ soma dos bits "1" deve ser par
Paridade
ímpar ⇒ soma dos bits "1" deve ser ímpar
ex.
Paridade par adicionada ao código ASCII de 7 bits
bit
a
caracter
b c z
A
1
2
3
4
5
6
7
VRC
1
1
0
0
0
0
1
1
1
1
0
0
0
1
0
1
1
0
0
0
0
0
1
0
1
1
0
0
0
1
1
0
1
1
1
1
0
1
0
1
. (*) este mecanismo de paridade não detecta um número par de erros no caracter
b) Detecção e Correção
b.1) Código BCC
Uma técnica simples é usar uma paridade longitudinal para blocos de memória - BCC
(Block Check Character) em adição ao VRC.
bit
a
caracter
b c z
1
2
3
4
5
6
7
VRC
1
1
0
0
0
0
1
1
1
1
0
0
0
1
0
1
1
1
0
0
0
1
1
0
1
1
1
1
0
1
0
1
BCC
A
1
0
0
0
0
0
1
0
1
0
1
1
0
1
1
1
Organização de Computadores
13
Neste caso é garantida a detecção de erros do tipo rajada (vários bits consecutivos),
que tenham comprimento menor ou no máximo igual ao tamanho do caracter. Para rajadas
maiores a detecção não é garantida. A correção é possível pelo cruzamento do VCR e BCC e
identificação da(s) célula(s) com erro.
Ex.
caracter
BCC
bit
a b c z A
1
2
3
4
5
6
7
VRC
1
1
0
0
0
0
1
1
1
1
1
1
1
0
0
1
1
1
0
0
0
1
1
0
1
1
1
1
0
1
0
1
1
0
0
0
0
0
1
0
1
0
1
1
0
1
1
1
Neste exemplo acima, o erro de rajada na letra "b" (4 bits em negrito) pode ser detectado pela paridade horizontal. Observar que a identificação dos bits errados só é possível
quando o erro puder ser detectado simultaneamente pelas paridades horizontal e vertical.
bit
a
caracter
b c z
1
2
3
4
5
6
7
VRC
1
1
0
0
0
0
1
1
1
1
0
0
0
1
0
1
1
1
0
0
0
1
1
0
1
1
1
1
0
1
1
0
BCC
A
0
1
1
0
0
0
1
0
1
0
1
1
0
1
1
1
Neste outro exemplo o ruído atingiu parte das letras "Z" e "A". Observe que o erro foi
detectado e ainda os bits errados de "A" puderam ser identificados. Já no exemplo abaixo você
pode observar que nenhum erro foi detectado apesar da ocorrência de uma rajada de comprimento 12, maior que o comprimento de um caracter.
bit
a
caracter
b c z
1
2
3
4
5
6
7
VRC
1
1
0
0
0
0
1
1
1
1
0
0
1
0
1
0
1
1
0
0
1
0
0
1
1
1
1
1
0
1
0
1
BCC
A
1
0
0
0
0
0
1
0
1
0
1
1
0
1
1
1
Organização de Computadores
14
b.2) Código de Hamming
Baseia-se na distância de hamming (HD), introduzida em 1950 por Richard Hamming,
que conta o número de bits diferentes entre 2 palavras de mesmo tamanho.
ex. de distância de hamming ⇒
0 1 0 1 1 0 1 1 byte A
0 0 1 0 0 1 1 0 byte B
----------------11111 1
⇒ hd= 6
O código de Hamming consiste basicamente na introdução de vários bits de paridade
em redundância que, através de um processo de exclusão combinatória, possibilitam identificar
a falha e em alguns casos corrigir o bit errado.
O número de bits de redundância necessários é calculado através da equação:
m
n
2 ( n + 1) ≤ 2
m
m+ r
2 ( m + r + 1) ≤ 2
⇒
m + r + 1 ≤2
r
onde:
n=m+r
bits de redundância
bits de dados
As posições dos bits de redundância são obtidas através da fórmula:
posx = 2x, x = [0, r-1].
ex. para um código ASCII com m = 7
temos que:
a) (7 + r + 1) ≤2r
⇒
r ≥ 4 ( mínimo de 4 bits de redundância)
b) a posição dos bits de redundância será: 1 (20), 2 (21), 4 (22) e 8 (23).
X
1
X
2
3
X
4
no relativo do bit
5
6
7
X
8
9
10 11
bits de redundância
Na verificação do erro, mede-se a paridade par ou ímpar, conforme tenha sido previamente definida, para cada bit de redundância aplicado sobre seu universo de atuação. Universo
este obtido com base na composição do número que indica a posição relativa do bit de dado.
ex.
bit de redundância 1 (20)
o universo de atuação do primeiro bit de paridade (bit 1) é composto pelos bits de dado
pertencentes às seguintes posições: {3, 5, 7, 9 e 11}.
Organização de Computadores
15
justificativa: 7 = 20 + 21 + 22 -
11 = 20 + 21 + 23
bit de redundância 2 (21)
O segundo bit de paridade avalia os dados pertencentes às posições: {3, 6, 7, 10 e 11}.
justificativa: 7 = 20 + 21 + 22 -
11 = 20 + 21 + 23
Em resumo, para um código de 4 bits de Hamming, o universo de atuação de cada bit de redundância é dado por:
bit 1 (20)
⇒
{3,5,7,9 e 11}
bit 2 (21)
⇒
{3,6,7,10 e 11}
2
bit 3 (2 )
⇒
{5, 6 e 7}
3
bit 4 (2 )
⇒
{9, 10 e 11}
Com base nos bits de redundância e seus respectivos universos de atuação é que se realiza o processo de detecção e possível identificação do bit errado. Assim, se os bits de redundância número 1, 2 e 4 acusarem erro, então concluí-se que o bit errado é o da posição 11
porque 1 + 2 + 8 = 11 (20 + 21 + 23).
A capacidade do método em detectar e corrigir erros depende da menor distância de
hamming - HD obtida com a codificação adotada.
A capacidade de detectar "d" erros requer um hdmin > d + 1
A capacidade de corrigir "d" erros requer um hdmin > 2d + 1
Assim, um código com hdmin = 4 é capaz de detectar erro de até 2 bits e corrigir erros
de até 1 bit.
hd = 4
Exemplos:
a) erro no bit de posição 6
• representação do caracter ASCII "a" (1100001) com 4 bits de redundância em paridade ímpar.
0
1
1
2
1
3
0
4
1
5
0
6
0
7
0
8
0
9
0 1
10 11
⇒
⇒
⇒
⇒
0
1
0
0
• cálculo dos bits de redundância:
bit 1: {3, 5, 7, 9 e 11}
bit 2: {3, 6, 7, 10 e 11}
bit 3: {5, 6 e 7}
bit 4: {9, 10 e 11}
≡
≡
≡
≡
{1, 1, 0, 0, 1}
{1, 0, 0, 0, 1}
{1, 0, 0}
{0, 0, 1}
• um erro no bit de posição 6 terá a seguinte representação:
Organização de Computadores
0
1
16
1
3
1
2
0
4
1
5
1
6
0
7
0
8
0
9
0 1
10 11
• a verificação através dos bits de redundância fornecerá:
⇒
⇒
⇒
⇒
bit 1: {1, 1, 0, 0, 1}
bit 2: (1, 1, 0, 0, 1}
bit 3: (1, 1, 0}
bit 4: {0, 0, 1}
0
0
1
0
⇒
⇒
⇒
⇒
correto
errado
errado
correto
0
1
1
0
(610)
Olhando-se de traz para a frente é possível visualizar a posição do bit errado. Lembre
que este mesmo valor, conforme visto no início desta seção, pode ser obtido pela fórmula da
potência de 2: (21 + 22 = 6).
b) erro nos bits 6 e 9
0
1
1
3
1
2
0
4
1
5
1
6
0
7
0
8
1
9
0 1
10 11
⇒
⇒
⇒
⇒
1
1
1
1
• verificação dos bits de redundância:
⇒
⇒
⇒
⇒
bit 1: {1, 1, 0, 1, 1}
bit 2: (1, 1, 0, 0, 1}
bit 3: (1, 1, 0}
bit 4: {1, 0, 1}
1
0
1
1
errado
errado
errado
errado
(1510)
Observe que o erro foi detectado porém os bits errados não puderam ser identificados..
c) erro nos 3, 6 e 9
0
1
0
3
1
2
0
4
1
5
1
6
0
7
0
8
1
9
0 1
10 11
⇒
⇒
⇒
⇒
0
0
1
1
• verificação dos bits de redundância:
⇒
⇒
⇒
⇒
bit 1: {0, 1, 0, 1, 1}
bit 2: (0, 1, 0, 0, 1}
bit 3: (1, 1, 0}
bit 4: {1, 0, 1}
0
1
1
1
correto
correto
errado
errado
(1210)
O erro de 3 bits foi detectado porém os bits errados não puderam ser identificados.
d) erro nos bits 3, 5 e 6
0
1
1
2
0
3
0
4
0
5
• verificação dos bits de redundância:
1
6
0
7
0
8
0
9
0 1
10 11
Organização de Computadores
bit 1: {0, 0, 0, 0, 1}
bit 2: (0, 1, 0, 0, 1}
bit 3: (0, 1, 0}
bit 4: {0, 0, 1}
17
⇒
⇒
⇒
⇒
0
1
0
0
correto
correto
correto
correto
⇒
⇒
⇒
⇒
0
0
0
0
(010)
Observe que neste caso o método falhou na detecção do erro de 3 bits.
V.4 Memória Secundária
É utilizada para armazenar grandes volumes de dados. É constituída por diferentes dispositivos, todos mais lentos e mais baratos por byte armazenado que a memória principal.
Os tipos principais de memória secundária são:
disquetes
discos
magnéticas
fitas
óticas
removíveis
fixos
rolo
cassete
cartucho
Zip drives
CDs
V.4.1 Discos Magnéticos
• rígidos - são discos de metal, geralmente de diâmetro entre 5 e 10 polegadas e coberto, em ambos os lados, por uma superfície magnetizável. Os discos giram a velocidades muito elevadas (da ordem de 5000 rpm) e as cabeças de leitura / gravação não tocam a superfície, flutuam a uma distância de alguns microns (10-6m). O
maior risco de falha é a aterrissagem das cabeças que causa perda total do disco e,
praticamente, de todos os dados gravados.
• flexíveis - disco de material plástico, flexível, e coberto em ambas as faces por uma
superfície magnetizável. As cabeças de leitura / gravação tocam a superfície, o que
provoca um desgaste de ambas as partes. Para reduzir este desgaste, as cabeças são
recolhidas e a rotação é interrompida enquanto a unidade não está lendo ou gravando.
a) Formatação
É a operação que subdivide o disco em cilindros, trilhas, clusters e setores.
• trilhas são círculos concêntricos onde os dados são gravados magneticamente. Um
disco é geralmente formatado com um valor entre 40 e algumas centenas de trilhas
por superfície.
Organização de Computadores
18
• setores são espaços radiais que subdividem as trilhas para endereçamento e acesso.
O setor contém um determinado número de bytes, geralmente 512. Nos sistemas
mais antigos representava a unidade lógica de acesso para leitura e gravação.
trilha
setor
Figura V.11 - Formatação
• clusters são utilizados nos sistemas mais modernos e representam a unidade lógica
de acesso. O tamanho de um cluster depende do tipo do disco, variando desde um
simples setor até um conjunto de vários setores. O sistema DOS, por exemplo,
adota a seguinte formatação:
Tipo do Disco
3.5" / 1.44M
Tamanho do Cluster
512 bytes
Tipo do Disco
HD ≤16M
3.5" / 720K
1024 bytes
5.25" / 1.2M
512 bytes
513M a
1,024G
1.025 a 2,048
Tamanho do Cluster
4096 bytes
(8 setores)
16K bytes
(32 setores)
32K bytes
(64 setores)
• cilindros formados pelo conjunto de trilhas de um mesmo raio e pertencentes a diferentes superfícies. O conceito é utilizado para agilizar o acesso e a transferência
de dados, pois as cabeças de leitura/gravação ficam todas simultaneamente posicionadas sobre um mesmo cilindro. A figura V.12 abaixo destaca alguns detalhes sobre
a estrutura física de uma unidade de disco magnético.
cabeçotes para
leitura / gravação
braço dos
cabeçotes
face superior
face inferior
cilindro
Figura V.12 - Estrutura de um Disco Magnético
Organização de Computadores
19
Cada sistema operacional implementa uma organização própria de controle e acesso
aplicado sobre a formatação física da unidade de disco vista acima. No sistema DOS, por
exemplo, a superfície do disco é logicamente dividida em duas partes, conforme mostrado na
figura V.13 abaixo, uma para armazenamento das informações utilizadas pelo sistema operacional (área do sistema) e outra para armazenamento dos arquivos propriamente ditos (área de
dados).
Setor 0
Último setor
Boot FATs
Diretório
Root
Área de Dados
Área do Sistema
Figura V.13 - Partes de uma Estrutura DOS
O Boot ocupa apenas um setor e tem por finalidade carregar o sistema operacional para
a MP quando da ocasião da inicialização do computador. A FAT - File Alocation Table, é utilizada pelo sistema para armazenar a situação de cada um dos clusters que compõem o disco,
se o mesmo está desocupado, ocupado ou defeituoso, por exemplo. Pela sua importância, o
sistema operacional mantém uma cópia da FAT afim de dobrar a confiabilidade do disco. A
terceira e última área do sistema é o Diretório Raiz (Root), que mantém uma entrada para cada
arquivo ou diretório ali registrado.
No sistema DOS, cada entrada em uma FAT geralmente possui comprimento de 12
(para os disquetes) ou 16 bits (para os HDs com mais de 16Mbytes). O comprimento da entrada na FAT e o tamanho adotado para o cluster definem a capacidade máxima de armazenamento do disco, como pode ser visto na tabela abaixo:
Disco
16M ou menos
17M a 128M
129M a 256M
257 a 512M
513M a 1,024G
1,025G a 2,048G
Cluster
4K
2K
4K
8K
16K
32K
FAT (entrada)
12 bits
16 bits
16 bits
16 bits
16 bits
16 bits
212 x 4K
216 x 2K
216 x 4K
216 x 8K
216 x 16K
216 x 32K
No diretório raiz, para cada entrada são reservados 32 bytes para armazenar as seguintes informações: nome e extensão do arquivo, tamanho, data e hora da última alteração,
atributos de segurança e o endereço do primeiro cluster (área do disco onde inicia o arquivo).
O endereço dos demais clusters ocupados pelo arquivo são obtidos diretamente na FAT, em
seqüência, a partir do primeiro, como pode ser visto na figura V.14 a seguir.
Organização de Computadores
20
Obtido no Root
1
ENTRADAS DA FAT
3
5
2
3
900
4
5
1005
.....
900
end
.....
1005
.....
Figura V.14 - Encadeamento de Clusters de uma arquivo, o endereço do primeiro cluster é
fornecido pela entrada no diretório do mesmo
b) Taxa de Transferência
É o número de bytes capaz de ser transferido do disco para a MP por unidade de segundo:
tx =
bytes transferidos
,
ta
onde "ta" é o tempo de acesso, que é dado por:
ta = seek + latência + tempo de transferência ,
sendo que:
∗ seek - é o tempo que a unidade gasta para posicionar o cabeçote de leitura e gravação sobre o cilindro desejado (um disco rígido gasta tipicamente 3ms entre trilhas
adjacentes e de 20 a 100ms para ir do cilindro mais externo ao mais interno e viceversa.
∗ latência - é o tempo gasto esperando pelo setor desejado (varia de 0 a 16.67ms
para discos rígidos girando a 3600rpm).
∗ tempo de transferência - é o tempo gasto na transmissão dos dados (leitura ou
gravação) propriamente dita.
(*) para os discos flexíveis existe mais um componente por conta do tempo de aceleração necessário para fazer com que a velocidade de cruzeiro do motor seja atingida.
V.4.2 Discos Ópticos
Usam tecnologia laser e possuem densidade de gravação muito superiores a dos discos
magnéticos.
Tipos:
∗ CDROM - Compact Disc Read Only Memory (só podem ser lidos).
∗ WORM - Write Once Read Many (admitem uma única vez).
∗ Magneto-Ópticos - combinam a tecnologia óptica com a magnética (admitem reutilização).
a) CDROMs
Disco plástico com uma fina camada de alumínio depositada nas superfícies, seguida
por uma camada plástica transparente para proteção.
Organização de Computadores
21
Trilhas em espiral
Setores
Figura V.15 - Disco Ótico
A gravação é feita por raio laser que faz furos de aproximadamente 1 micron, em uma
trilha espiralada. Os furos são chamados "pits" e as áreas não queimadas, entre os pits, são
chamadas "lands".
A leitura é feita através da projeção de um raio de luz, que é refletido de forma diferente pelos pits e lands, possibilitando a distinção entre ambos. A unidade de endereçamento é
o setor, geralmente de 2Kbytes. O byte, por sua vez, é expandido para 14 bits pela adoção do
código "reed-solomon" para detecção e correção de erros.
∗ capacidade - 650Mbytes
∗ taxa de transferência - aprox 150Kbps (uma ordem de grandeza mais lentos que os
magnéticos rígidos)
∗ confiabilidade - muito mais robustos que os magnéticos quanto ao calor, sol e poeira, porém muito mais suscetíveis a erros de gravação.
∗ aplicação - para armazenamento de grandes volumes de dados que não se alteram.
b) Magneto-Ópticos
Representa a 3a geração de CDs, onde a superfície plástica é coberta com exóticas ligas
metálicas (térbio e gadolínio) que possuem a interessante propriedade de serem insensíveis ao
campo magnético quando em baixa temperatura e se tornarem sensíveis a ele quando em alta
temperatura.
A cabeça de leitura / gravação possui um laser e um magneto. O laser dispara uma rajada de onda ultracurta, elevando instantaneamente a temperatura do local e, a seguir, o magneto cria o campo na direção desejada ("1" ou "0").
V.4.3 - Fitas Magnéticas
São dispositivos de acesso sequencial e de taxa de transferência mais baixa que os discos, mais baratas e muito utilizadas para backup.
∗ densidade de gravação - 800, 1600 e 6250 bpi
∗ formatação - na organização mais comum, é dividida em 9 trilhas longitudinais e
frames verticais contendo 8 bits de dados e 1 de paridade cada.
∗ unidade de acesso - é o bloco ou registro físico.
Organização de Computadores
22
∗ IRG - é o espaço para repouso do cabeçote de leitura/gravação existente entre dois
blocos consecutivos. Seu tamanho é de 3/4" e é usado para estabilizar a velocidade
da fita nos períodos de aceleração e desaceleração.
∗ Um bloco pode conter um ou mais registros lógicos. O tamanho do bloco é determinado pelo programador, que deve atentar para o binômio eficiência e otimização.
Tipos
rolo - carretéis de 600, 1200 e 2400 pés
cartucho - acondicionadas em caixas plásticas
cassete - de baixa velocidade
1
9
Bloco ou Registro Físico
IRG - Inter Record
Gap
trilhas
frame
Figura V.16 - Organização de uma Fita Magnética
V.5 - Dispositivos de Entrada e Saída
Barramento de Memória
MP
UCP
Barramento de E/S
Canal
Multiplex
Canal
Seletor
Disco
Controladora de
terminais
Impressora
Disco
Disco
Figura V.17 - Canais de E / S
São as unidades que possibilitam a comunicação do computador com o meio externo.
A interligação destes dispositivos com o restante do computador pode ser via canais de E/S -
Organização de Computadores
23
processadores dedicados (característicos dos mainframes) ou através de formas mais rudimentares de E/S (características dos mini, superminis e microcomputadores).
Os canais de E/S liberam a UCP para executar outras atividades enquanto eles se encarregam da comunicação com o dispositivo de E/S e a transferência dos dados.
Um computador típico pode ter vários canais, cada qual atendendo um ou mais dispositivos. Existem três tipos de canais: multiplexador, seletor e bloco-multiplexador.
O canal multiplexador é geralmente assíncrono e utilizado para os dispositivos de baixa ou média velocidade, transmite um byte por vez e pode atender a diversos dispositivos simultaneamente.
O canal seletor é geralmente síncrono e projetado para atender uma única operação de
E/S a cada instante, sendo normalmente utilizado para controlar um dispositivo de alta velocidade. O canal bloco-multiplexador combina as características dos canais multiplexador e seletor, provê conexão a diversos dispositivos de alta velocidade e transfere um bloco de dados em
cada operação.
Sistemas de E/S
O sistema de E/S se constitui basicamente de quatro elementos: o dispositivo (device
ou drive), a interface (controladora), o programa de comunicação (device driver) e as rotinas
de E/S do sistema operacional.
Discos
read registro
x
Processo
Rotina E/S
In bloco n
Disk Driver
Disco x
cilindro y
trilha z
setor w
Acessa x
Controla-dora
x
y
z
Figura V.18 - Sistema de E/S
As rotinas de E/S pertencem à camada de mais alto nível do sistema operacional e têm
por objetivo permitir ao usuário realizar operações de E/S sem se preocupar com detalhes de
operação do dispositivo que está sendo acessado. Assim, quando um usuário cria um arquivo
em disco, não lhe interessa saber como é a formatação do disco, nem em que trilha ou setor o
arquivo será gravado.
Um dos principais objetivos das rotinas de E/S é propiciar uma interface simples entre
as aplicações e os dispositivos bem como entre os dispositivos e o restante do sistema operacional. Elas são também responsáveis por implementar todo um mecanismo de proteção de acesso aos dispositivos e arquivos.
Organização de Computadores
24
Os device drivers são as rotinas do sistema operacional que têm como função se comunicar com os dispositivos em nível de hardware, geralmente através de placas controladoras.
Elas especificam características físicas de um dispositivo. Cada device drive manipula somente
um tipo de dispositivo ou um grupo de dispositivos semelhantes. Os drivers têm como função
receber comandos gerais repassados pelas rotinas de E/S e traduzi-los para comandos específicos que são executados pelas controladoras.
As controladoras são componentes eletrônicos, isto é, são placas instaladas nos slots da
placa mãe de um PC por exemplo, responsáveis por manipular diretamente os dispositivos de
E/S. Suas principais funções são: controle e temporização; comunicação com o processador;
comunicação com o dispositivo externo; armazenamento temporário (bufferização) dos dados
e detecção de erro. Estas placas variam em complexidade e no número de dispositivos que
controlam. Geralmente possuem memória e registradores próprios para poder executar as instruções enviadas pelo device driver. Podem ser dos tipos serial ou paralela. (fig. V.19)
Interface
com o Dispositivo
Reg. de Dados
dados
Reg. de Estado
Dispositivo
Vias de Endereço
Interface
com o Dispositivo
Lógica de
E/S
Vias de Controle
estado
controle
Figura V.19 - Diagrama de Blocos de uma Placa Controladora
As formas de acionamento e execução das operações de E/S, podem ser dos seguintes
tipos:
1. Programada com espera ocupada (busy wait)
2. acionada por interrupção
3. acesso direto à memória.
UCP
MP
Vídeo
Teclado
Interfa-ce
Serial
Interfa-ce
Serial
Printer
Interfa-ce
Paralela
Barramento
Figura V.20 - Estrutura de um Sistema de E/S
HD
Interfa-ce
Paralela
Organização de Computadores
25
E/S programada com espera ocupada (Busy Wait)
É o método mais simples possível, onde o computador possui apenas uma instrução de
entrada (IN) e uma de saída (OUT). Dependendo da implementação, estas instruções podem
ler e gravar diretamente na memória (caracterizando o memory-mapped I/O) ou acessar diretamente a interface do dispositivo.
Em ambos os casos dois ou três buffers (registradores) são utilizados para cada dispositivo, um para status, um para entrada (read) e outro para saída (write). Um único caractere é
transferido entre um registrador da UCP e o dispositivo de E/S selecionado, sendo que a UCP
deve executar a instrução explícita desejada (IN ou OUT) para cada caractere transmitido ou
recebido.
read
processo
write
CTL
Dispositivo
status
UCP
MP ou I/O
Figura V.21 - E/S Programada
Ao usar E/S programada para leitura de um caractere por exemplo, a UCP fica em loop
lendo repetidamente o registrador de status, esperando que o bit que autoriza a operação seja
setado pelo dispositivo. A seguir ela lê o dado colocado pelo dispositivo no buffer de leitura
(read) e limpa (resseta) o bit previamente setado pelo dispositivo no buffer de status. O processo de escrita é semelhante.
A principal desvantagem da E/S programada é que a UCP gasta a maior parte do seu
tempo em loop, esperando um dispositivo ficar pronto. Esta prática é chamada de espera ocupada (busy wait), que é uma espera dispendiosa. Uma maneira de evitar esta perda desnecessária de capacidade de processamento da UCP é fazer com que esta não precise ficar esperando
pelo dispositivo que deve, ele prórpio, informar à UCP quando do término da execução da
operação solicitada. Este é o método da interrupção.
E/S acionada por interrupção
O termo interrupção é usado para identificar a ocorrência de um evento não-freqüente,
não-esperado ou aleatório, que obriga a UCP a desviar, temporariamente, o fluxo do programa
em execução para o de uma rotina que atenda a interrupção. A grande vantagem desta técnica
em relação a da E/S programada, está no fato de que a UCP deixa de esperar em loop pelo
dispositivo.
O método mais usual de implementar a técnica de interrupção é pela ativação de um
sinal de controle chamado interrupt request (IR), ao qual a UCP responde ativando uma rotina
de tratamento específica para cada dispositivo (device drive). O processamento da interrupção
envolve:
Organização de Computadores
26
1. a UCP identifica a fonte da interrupção;
2. a UCP recupera o endereço inicial da rotina de tratamento da interrupção (interrupt
table);
3. o PC (program counter) e o vetor de status do processo corrente (PSW) são salvos
na pilha (stack);
4. o PC é carregado com o endereço inicial da rotina de tratamento da interrupção;
5. após a execução da rotina de tratamento, o PC e a PSW do processo interrompido
são recuperados da pilha, e o processo interrompido reinicia o processamento de
onde havia parado.
Embora a E/S por interrupção represente um avanço em relação à E/S programada, ela
está longe de ser perfeita. O problema é que ela requer a ocorrência de uma interrupção para
cada caractere transmitido e processar uma interrupção é uma tarefa cara. A solução é voltar a
E/S programada porém não deixar a responsabilidade de sua execução nas mãos da UCP surge então, a técnica do DMA (Acesso Direto à Memória).
E/S por DMA
É a transferência de dados diretamente entre o dispositivo de E/S e a MP, sem a intervenção da UCP. Na operação de DMA, a UCP atua apenas nas fases de inicialização (fornecendo o endereço e o número de bytes a ser transferido) e de finalização. Toda a transferência
é feita automaticamente pela controladora de DMA.
Ao receber um pedido de DMA (DMA request), a UCP interrompe suas atividades em
um dos pontos permitidos dentro do ciclo de instrução (fig. V.21), e atende o DMA.
ciclo de instrução
ciclo de
UCP
fetch
decode
data fetch
DMA
breakpoints
execution
store
IR breakpoint
Figura V.21 - Ciclo de Instrução x Pontos de Interrupção
A técnica de DMA pode ser implementada segundo duas filosofias:
1. block transfer ==> transfere grandes volumes de dados em uma única operação
(durante a transferência dos dados a UCP pode continuar operando normalmente
porém não pode acessar a MP);
Organização de Computadores
27
2. cycle stealing ==> transfere apenas um ou dois bytes de cada vez, "roubando" pequenos ciclos de memória que não são sentidos pela UCP em virtude da parada do
seu relógio.
A pastilha de DMA possui (pelo menos) 4 registradores internos, todos podendo ser
carregados pelo processo em execução na UCP. O primeiro deles contém o endereço de memória a ser lido ou escrito, o segundo contém o contador de quantos bytes (ou palavras) devem ser transferidos, o terceiro especifica o dispositivo a ser usado e o quarto informa a operação a ser realizada (leitura ou gravação).
(a)
UCP → I/O
Comando de
leitura
(b)
UCP → I/O
(c)
Comando de
Comando de
UCP → DMA
leitura
leitura
≈
I/O → UCP Verifica Estado
I/O → UCP Verifica Estado Interrupção
Não
DMA → UCP
Pronto
?
Não
Sim
I/O → UCP Lê da Interface
UCP → MP
Não
OK
?
≈
Lê Estado do
DMA
Erro
Sim
I/O → UCP Lê da Interface
Grava na
Memória
Grava na
Memória
FIM
?
FIM
?
Figura V.22 - Fluxograma representativo das 3 estratégias de comunicação com dispositivos
de E/S. (a) entrada e saída programada; (b) por interrupção e © por DMA
V.6 Arquiteturas Paralelas
Caracteriza-se pela execução em paralelo e, portanto, ao mesmo tempo, de 2 ou mais
instruções de um mesmo processo ou de diferentes processos. As arquiteturas paralelas podem
ser classificadas segundo Flynn em três categorias, com base no número de fluxos de dados e
de instruções que elas suportam:
1) SISD - Single Instruction Single Data (fluxo único de instrução e de dado - caracterizado pelo computador seqüencial - também conhecido como Von Newman)
Organização de Computadores
28
2) SIMD - Single Instruction Multiple Data (fluxo único de instrução porém múltiplo
de dados - caracterizados pelas vector e array machines)
3) MIMD - Multiple Instruction Multiple Data (múltiplos fluxos de instruções e de dados - caracterizados por arquiteturas com matrizes de processadores)
SISD
• é a máquina convencional, com um único programa executado passo a passo por
uma única UCP.
• uma quantidade limitada de paralelismo pode ser alcançada com a introdução de algumas modificações na estrutura SISD básica, como por exemplo:
a) pipelining
Estações / instruções
P1
P2
P3
P4
P5
A
1
B
A
2
C
B
A
3
D
C
B
A
4
E
D
C
B
A
5
F
E
D
C
B
6
t
Figura V.23 - Máquina SISD com Pipeline
Baseia-se no processamento do ciclo de instrução por partes, como numa linha de
montagem, onde cada estação de trabalho é responsável pelo processamento de apenas uma
fase do ciclo total.
b) máquina com múltiplas unidades funcionais
A UCP busca tantas instruções quantas forem as unidade funcionais disponíveis ou até
que uma instrução dependa do resultado de outra ainda em execução.
registradores
+
+
x
%
Figura V.24 - Máquina SISD com Múltiplas Unidades Funcionais
÷
Organização de Computadores
29
SIMD
Ideal para aplicações vetoriais e matriciais, onde uma mesma operação se repete sobre
vários dados.
Vetor B
Vetor A
ULA
Vetor Resultado
A+B
Figura V.25 - Estrutura SIMD
MIMD
São vários processadores independentes, cada um executando um programa diferente.
Dependendo do granularidade de integração pode caracterizar um multiprocessador, uma rede
de computadores ou um sistema distribuído.
V.7 Arquiteturas CISC e RISC
A tecnologia RISC (Reduced Instruction Set Computer), criada nos laboratórios da
IBM Research em 1987, pelo Dr. Jolm Cocke, representou uma quebra na tendência até então
predominante, que era na direção de máquinas cada vez maiores e mais complexas, conhecida
como tecnologia CISC (Complex Instruction Set Computer).
Embora não haja uma definição precisa para RISC, os primeiros projetos nesta linha
fizeram uso de um pequeno conjunto de instruções simples, que eram executadas rapidamente,
em um único ciclo de máquina. Esta característica era oposta a da tecnologia CISC, onde as
instruções consumiam vários ciclos de máquina.
Em função desta característica, as instruções RISC podiam ter sua execução realizada
diretamente pelo hardware, como nas máquinas mais antigas desprovidas de microcódigo, o
que simplificava e reduzia os custos de projeto e fabricação dos computadores.
Uma conseqüência do princípio de que toda instrução RISC só pode consumir um ciclo
de máquina é que qualquer operação que consuma mais do que um ciclo não pode pertencer
ao conjunto de instruções. Assim, muitas máquinas RISC não possuem instruções de multipli-
Organização de Computadores
30
cação e de divisão. Estas e as demais instruções de ponto flutuante são executadas por um coprocessador aritmético.
Em 1991 a IBM lançou a chamada 2a geração da tecnologia RISC, baseada na tecnologia pipeline e de processadores de funções múltiplas. As máquinas desta geração, como por
exemplo o Power PC e o Power 2, geralmente possuem um processador de desvio, um de
ponto-fixo e um de ponto-flutuante, e podem executar até quatro ou cinco operações por ciclo
de máquina.
Em resumo, uma máquina RISC se caracteriza por:
a) ter instruções simples executadas em um ciclo de máquina;
b) usar apenas as instruções Load e Store para referenciar a memória;
c) fazer uso da tecnologia pipeline;
d) ter instruções executadas diretamente pelo hardware;
e) ter instruções com formato fixo;
f) ter poucas instruções;
g) delegar a complexidade para o compilador; e
h) fazer uso de múltiplos conjuntos de registradores.
V.8 Referências Bibliográficas
• Stallings, William, Operating Systems,Ed. Acmillan Publishing Company, 1992.
• Tanenbauum, Andrew S., Organização Estruturada de Computadores, Ed. Campus, 1993.
• Silberschatz, Abraham e Galvin, Peter B., Operating Systems Concepts, Ed. AddisonWesley Publishing Company, 1994.
Baixar