Sumário
“A INTEGRAÇÃO DA PRODUÇÃO ATRAVÉS DAS
REDES DE COMUNICAÇÃO: AS REDES LOCAIS
INDUSTRIAIS”
I — AS REDES E OS NÍVEIS HIERÁRQUICOS DA INTEGRAÇÃO
FABRIL
1.1. O MODELO CIM
1.2. A INTEGRAÇÃO NO MODELO CIM: TIPOS DE REDE
» DEVICEBUS/CONTROLBUS, FIELDBUS, ENTERPRISE
NETWORK
Sumário
II —
2.1.
2.2.
–
–
–
–
–
2.3.
–
–
–
–
AS REDES LOCAIS INDUSTRIAIS
MOTIVAÇÕES
CARACTERÍSTICAS BÁSICAS DAS REDES INDUSTRIAIS:
COMPORTAMENTO TEMPORAL
CONFIABILIDADE
REQUISITOS DO MEIO AMBIENTE
TIPO DE MENSAGENS
INTERCONECTIVIDADE/INTEROPERABILIDADE
PROJETOS DE PADRONIZAÇÃO DAS REDES INDUSTRIAIS
PROWAY
IEEE802 E ISO/IEC 8802
» IEEE 802.3: Ethernet, switched ethernet, fast ethernet
» IEEE 802.4: Token-bus
» IEEE 802.5: Token-ring
» IEEE 802.11: Redes sem fio
MAP/TOP
FIELDBUS
Sumário
III — O PROJETO MAP
3.1. MOTIVAÇÃO E HISTÓRICO
3.2. A ARQUITETURA MAP
3.3. A PROPOSTA MAP-EPA
3.4. A PROPOSTA MINI-MAP
3.5. O PADRÃO DE MENSAGENS MMS
– Objetos MMS
– Serviços MMS
Sumário
IV —
4.1.
4.2.
–
–
–
–
–
4.3.
–
–
–
–
O PROJETO FIELDBUS
MOTIVAÇÕES E REQUISITOS DO FIELDBUS
A PROPOSTA FRANCESA FIP
Introdução
A camada Física
A camada de Enlace
A Camada de Aplicação
Funções de gerenciamento da rede
A PROPOSTA ALEMÃ PROFIBUS
Introdução
A camada Física
A camada de Enlace
A camada de Aplicação
Sumário
4.4. A PROPOSTA ISA/IEC FIELDBUS (FIELDBUS
FOUNDATION)
– Introdução
– A camada Física
– A camada de Enlace
– A camada de Aplicação
– Camada do Usuário
– Serviços de Gerenciamento de rede
Sumário
V — ALGUNS PRODUTOS EXISTENTES E SUA
APLICABILIDADE EM AUTOMAÇÃO
5.1. INTRODUÇÃO
5.2. REDES PARA INSTRUMENTAÇÃO: GPIB
5.3. REDES PARA AUTOMAÇÃO DE ESCRITÓRIOS:
ETHERNET, TOKEN-RING, ARCNET
5.4. REDES INDUSTRIAIS, PREDIAIS E OUTRAS:
PROFIBUS DP/PA/FMS, BITBUS, CAN, VAN, HART,
INTERBUS-S, ASI-BUS, FAIS, LON, P-NET, SERCOS,
MODBUS, REDES IBM (TOKEN-RING, TOKEN-BUS,
SNA), UCA, etc.
Introdução
- Primeiros computadores:
• Máquinas complexas, grandes, caras
• Requeriam salas isoladas com ar condicionado
• Operadas apenas por especialistas
• programas submetidos em forma de “jobs”
seqüenciais
• Usuário inseria programa por meio de cartões
perfurados
• Várias idas ao NPD eram necessárias para rodar
um programa, mesmo pequeno.
Introdução
•
Primeiros computadores:
¾ 1946: ENIAC (Electrical Numerical Integrator and Calculator)
¾ 1948: UNIVAC, primeiro computador comercial
¾ 1953: IBM 701
ENIAC pesava 30 toneladas
e ocupava 180 m² de área construída
Introdução
• Anos 60:
– usuários conectados ao computador por terminais
– terminais necessitavam técnicas de comunicação de dados com
computador central => inicio das redes
teleprinter
Televideo 925
Introdução
• Anos 60:
–
–
–
–
–
Esforços para melhorar interação entre computador e usuários.
Surge técnica de time-sharing, primeiros sistemas multi-usuários
Usuários conectados ao computador por terminais
Cada terminal atendido por um interpretador de comandos
Comunicação entre terminais e computador central:
» Definição de uma interface (serial, paralela), conectores, cabos,
etc.
» Definição de unidade básica de informação (bit = binary unit) –
definir duração, sinais 0 e 1, sincronização, etc.
» Definição de códigos para representar letras, números e outros
símbolos alfanuméricos – ASCII, EBCDIC
» Definição de protocolos para envio, recepção, detecção de erros,
etc.
– Surgem primeiras técnicas de comunicação
Sistemas Multiuser
Terminal 4
Terminal 3
Terminal 1
Mainframe com
time-sharing OS
st4
st3
st1
Terminal 2
st2
RR
Introdução
- Anos 70:
•
surgem microprocessadores
•
computadores muito mais baratos => difusão do uso
- Após década de 70:
•
Computadores cada vez mais velozes, tamanho menor, preço mais
acessível
•
Surgem novas aplicações
•
Incremento na capacidade de cálculo e armazenamento
•
Aplicações mais complexas requerem computadores cada vez mais
poderosos (PC, Workstation, Mini, Mainframe, Supercomputador,
etc.)
•
Computadores conectados podem ter desempenho melhor do que um
mainframe, além de custo menor => Sistemas Distribuídos
•
Necessidade de desenvolver
computadores => redes
técnicas
para
interconexão
de
Introdução
- Informatização crescente das empresas
- Sistemas de Bancos de Dados muito úteis
- Primeiros setores a serem informatizados:
-
Finanças, folha de pagamento, compras, vendas, setor de pessoal
- Posterior informatização do chão de fábrica:
-
CNC, CLP, RC, IC, Sistemas de aquisição de dados, etc.
-
Mais recente: Sensores e Atuadores microprocessados.
- Métodos iniciais de comunicação de dados:
-
fitas K7, cartões, fitas perfuradas, disquetes.
- Método moderno: redes de comunicação (LA
Introdução
-
Requisitos de comunicação fabril:
¾Compartilhamento de recursos;
¾Gerenciamento da heterogeneidade;
¾Gerenciamento de diferentes tipos de diálogo;
¾Garantia de um tempo de resposta médio ou
máximo;
¾Confiabilidade
informação;
dos
equipamentos
¾Conectividade e interoperabilidade;
¾Evolutividade e flexibilidade.
-
e
da
Introdução
- Necessário definir arquiteturas, topologias e protocolos
apropriados para redes de comunicação industriais.
- Redes do tipo ponto-a-ponto: falha em uma máquina pode
afetar comunicação entre outras máquinas (centralização das
funções de comunicação).
- Redes de difusão: falha em uma máquina não necessariamente
afeta comunicação entre outras máquinas (possibilidade de
descentralização da comunicação).
- Idéia do final dos anos 70/ início 80: rede única para toda a
fábrica.
- Idéia atual: não existe uma rede única que atende as
necessidades de todas as atividades existentes em uma fábrica.
Os Níveis Hierárquicos de Integração Fabril
Administração
Corporativa
SISTEMA DE
COMUNICAÇÃO
Planejamento
(Factory)
CAD, CAE, CAP,
CAPP, CAQ, etc...
Área
(Shop)
FMS
Fieldbus, MAPEPA, Mini-MAP
Célula
(Cell)
FMC
Subsistema
(Subsystem)
Componente
(Component)
Enterprisenetwork
(MAP, TOP)
Torno, Manipulador,
Centro de Usinagem,
etc...
S
A
S
A
S
A
S
A
Motores, Chaves,
Relés, etc...
RTLAN
Características da comunicação em CIM
Administração Corporativa
Planejamento
Custo
médio
de uma
estação
Tempo
ocioso entre
transmissões
Vida útil e
tamanho
médio dos
dados
Área
Célula
Unidade (subsistema)
Componente
Número
de
estações /
segmento
Tráfego
médio
Hostilidade
do meio
Quadros /
seg.
Motivação das Redes Industriais
-
Na década de 80, maioria das redes de comunicação existentes
concebidas para automação de escritórios.
-
Ambiente industrial tem características e necessidades que tornam
redes para automação de escritórios mal adaptadas:
-
ambiente hostil para operação dos
(perturbações eletromagnéticas, elevadas
sujeira, áreas de segurança intrínseca, etc.);
-
troca de informações se dá entre equipamentos e, as vezes,
entre um operador e o equipamento;
-
tempos de resposta críticos;
-
segurança dos dados crítica;
-
grande quantidade de equipamentos pode estar conectada na
rede => custo de interconexão crítico.
equipamentos
temperaturas,
Características e requisitos básicos
das redes industriais
•
•
•
•
Comportamento temporal
Confiabilidade
Requisitos do meio ambiente
tipo de mensagens e volume de
informações
• Conectividade/interoperabilidade
(padronização)
a) Comportamento temporal
-
Aplicações Industriais freqüentemente requerem sistemas de
controle e supervisão com características de Tempo-Real.
-
Em aplicações tempo real, importante poder determinar
comportamento temporal do sistema de comunicação.
-
Mensagens em STR podem ter restrições temporais:
– Periódicas: tem que ser enviadas em intervalos conhecidos e
fixos de tempo. Ex.: mensagens ligadas a malhas de
controle.
– Esporádicas: mensagens sem período fixo, mas que tem
intervalo de tempo mínimo entre duas emissões
consecutivas. Ex.: pedidos de status, pedidos de emissão de
relatórios.
– Aperiódicas: tem que ser enviadas a qualquer momento, sem
período nem previsão. Ex.: alarmes em caso de falhas.
Sistemas Tempo-Real
INTERFACE
Sistema
estímulo
SENSOR
Sistema
ATUADOR
resposta
Controlar
de
Controle
a
(Ambiente)
•
Um STR é um sistema computacional que deve reagir a
estímulos (físicos ou lógicos) oriundos do ambiente dentro de
intervalos de tempo impostos pelo próprio ambiente.
•
A correção não depende somente dos resultados lógicos obtidos,
mas também do instante no qual são produzidos.
Arquitetura para Sistemas Tempo-Real
A Problemática da Comunicação em Tempo-Real
M1
M2
M3
DL = 10
DL = 15
DL = 50
End. 01
End. 02
End. 03
M4
•
M5
DL = 25
DL = 5
End. 04
End. 05
Mensagens pendentes em cada estação devem ser entregues a
seu destino antes de um prazo limite (deadline) associado.
Comunicação em Tempo-Real
• Problema de comunicação tempo real:
– Queremos garantir que todas as mensagens sejam entregues antes
de seu deadline
– Como atribuir prioridades:
» priorizar mensagens individuais ou estações?
– Como escalonar uso do meio (recurso compartilhado)?
– Como verificar se escalonamento está correto?
– Escalonar com base em eventos (event trigger) ou no tempo (time
trigger)?
– como definir concessão do direito de acesso ao meio entre estações
diferentes de forma e respeitar prioridades ?
Comunicação em Tempo-Real
•
Protocolo MAC deve atender mensagens periódicas com a
maior eficiência possível, respeitando seus deadlines.
•
Protocolo MAC precisa garantir rápido acesso ao
barramento para mensagens esporádicas de alta prioridade.
•
MAC deve ter comportamento determinista e, idealmente,
permitir escalonamento ótimo global de mensagens.
•
LLC (Controle Lógico de Enlace) deve escalonar
mensagens locais pendentes por deadline ou prioridade
associada.
Arquitetura de rede para CTR
Software
AP
AP
Aplicativo
7
Camada de Aplicação
Controle Lógico de enlace (LLC)
2
Controle de Acesso ao Meio (MAC)
1
Camada Física
Serviços de enlace para CTR
Serviços sem conexão:
• SEND (receptor, mensagem, requisitos TR);
• mensagem = RECEIVE (emissor);
Serviços com conexão:
• rtcid = CONNECT(receptor, requisitos TR);
• SEND (rtcid, mensagem);
• mensagem = RECEIVE (rtcid);
• DISCONNECT(rtcid);
Classificação dos Protocolos MAC
• Alocação fixa: alocam o meio às estações por determinados intervalos de
tempo, independentemente de haver ou não necessidade de acesso (ex.:
TDMA = Time Division Multiple Access);
• Alocação aleatória: permitem acesso aleatório das estações ao meio (ex.:
CSMA = Carrier Sense Multiple Access). Em caso de envio simultâneo por
mais de uma estação, ocorre uma colisão e as estações envolvidas tem que
transmitir suas mensagens após a resolução do conflito resultante
(protocolos de contenção);
• Alocação controlada: cada estação tem direito de acesso apenas quando de
posse de uma permissão, que é entregue às estações segundo alguma
seqüência predefinida (ex.: Token-Passing, Master-Slaves);
• Alocação por reserva: para poder usar o meio, as estações tem que reservar
banda com antecedência, enviando pedidos a uma estação controladora
durante um intervalo de tempo pré-destinado e este fim (ex.: CRMA =
Cyclic Reservation Multiple Access);
• Híbridos: consistem de 2 ou mais das categorias anteriores.
•
Classificação dos Protocolos MAC
Classificação com relação ao comportamento
temporal:
– protocolos deterministas: caracterizados pela
possibilidade de definir um tempo limite para a
entrega de uma dada mensagem (mesmo que
somente em pior caso);
– protocolos não deterministas: tempo de entrega
não determinável (aleatório ou probabilístico).
Protocolos MAC não deterministas - CSMA
- CSMA: Carrier Sense Multiple Access = Acesso Múltiplo por Detecção de Portadora
- método não deterministico com controle distribuído
- variantes:
- CSMA não persistente:
- emissor escuta o meio
- se meio livre, transmite msg
- se meio ocupado, tenta retransmitir mais tarde
- CSMA 1-persistente:
- meio livre, transmite com probabilidade 1 (100%)
- meio ocupado, espera na escuta (persiste) até o canal ficar livre
- CSMA p-persistente:
- meio livre, transmite com probabilidade p ou atrasa a tx em um dado
tempo com probabilidade (1-p); se canal ainda livre, repete
procedimento; se ocupado, aguarda liberação e reinicia
- meio ocupado, aguarda liberação e reinicia
CSMA persistente e não persistente
• CSMA 1-persistente: faz melhor uso da banda, mas tem grande chance
de gerar colisões
• CSMA não persistente: faz pior uso da banda, mas tem menor
probabilidade de gerar colisões
• CSMA p-persistente (p<1): compromisso entre as soluções anteriores.
np
P-p
1-p
tempo
CSMA
-
Todas as variantes: não impedem colisão => escuta só no início
-
Estação receptora envia quadro de reconhecimento (ACK) a
emissora se msg Ok
-
Em caso de colisão ou erro de tx: msg retransmitida após Timeout no emissor
CSMA/CD (ETHERNET)
-
CSMA/CD: Carrier Sense Multiple Access with Colision Detection =
Acesso Múltiplo por Detecção de Portadora com Detecção de Colisão
-
Método de acesso não determinístico com controle distribuído
-
operação:
-
emissor escuta meio
-
Se meio livre, enviar primeiro byte do quadro
-
emissor escuta meio durante sua tx e compara com byte enviado
-
Se igual, não houve colisão => enviar resto da mensagem
-
Se diferente, houve colisão => parar tx, esperar tempo randômico
e reiniciar operação (repetida no máximo 16x)
limite tempo de espera na i-esima colisão= 2i - 1 [time slots]
-
Se tx bem sucedida (sem colisão), emissor espera ACK do
receptor
O protocolo CSMA/CD
-
Inovação: escuta e envio podem estar ativos ao mesmo tempo!
emissor
receptor
emissor
emissor
O protocolo CSMA/CD
• Métodos de acesso CSMA convencionais:
– Simplicidade;
– Autonomia das estações;
– tempo de reação não pode ser exatamente determinado (não
determinismo).
• Tempo de espera é randomizado segundo algoritmo
BEB (Binary Exponential Backoff)
Randomização de tempo no CSMA/CD
(Binary Exponential Backoff)
start
no
yes
nc = 0
Station
Ready ?
New
Frame ?
Ether
Silent ?
nc = nc+1
no
limit = 2nc-1
Wait=random [0,limit]
transmit
no
Collision ?
CSMA/CD
Probabilidade
de colisão
Tráfego x número
estações
CSMA/CD
-
-
-
Desempenho muito melhor que CSMA, pois:
•
não perde tempo enviando dados após colisão
•
ocorrência da colisão detectada logo no início da tx
Razões do não-determinismo:
•
não se sabe se haverão colisões
•
não se sabe quantas colisões seguidas podem ocorrer
•
não se conhece de antemão tempo aleatório de espera em
caso de colisão
Esta característica torna protocolos CSMA e CSMA/CD ruins
para aplicações com restrições de tempo de resposta (sistemas
tempo real), muito comuns na automação de chão de fábrica.
Protocolos MAC Deterministas
- Métodos de acesso deterministas: tem tempo de
resposta limitado e determinável (ao menos em
pior caso).
- Podem ser classificados em:
- métodos com comando centralizado (ex.:
Mestre-Escravos, árbitro de barramento)
- métodos com comando distribuído (ex.:
Token-Passing, variantes deterministas do
CSMA).
-
Comando Centralizado: Mestre-escravos
escravo escravo escravo escravo
Comando Distribuído: Token-bus
receptor
ficha
emissor
Comando Distribuído: Token-Ring
Estação
TAP
Interface
p/ anel
anel unidirecional
Token
Comando Distribuído: Forcing Headers
-
Variante determinista de CSMA (CSMA/NBA = CSMA with
Nondestructive Bitwise Arbitration – usado em CAN).
-
Estações enviam bit a bit um identificador da mensagem, que
define prioridade da mesma.
-
Cada mensagem tem que ter prioridade diferente das demais.
-
Se todos os bits do identificador são 0, prioridade máxima.
-
Camada física executa AND sobre cada bit enviado ao
barramento (CD ativada ao enviar um 1 e desativado ao enviar
um 0).
-
Transmissão interrompida quando um 1 é enviado e ocorrer
colisão (0 é lido).
-
Se identificador transmitido até o fim sem colisão, resto da
mensagem é enviado.
Comando Distribuído: Forcing Headers
100 dados
Header do frame
Frame a enviar
Nó 4
Nó 0
000 dados
Nó 1
001 dados
Nó 2
010 dados
Nó 3
011 dados
Comando Distribuído: Forcing Headers
• Para evitar monopólio do meio por nó gerador de
mensagem de alta prioridade, espaço entre quadros
preenchido por campo de bits em 1 inserido no final de
cada quadro.
• O barramento só é considerado livre para o mesmo nó
enviar nova mensagem após ter detectado que o espaço
interframes não foi interrompido por um bit em 0.
• Estação possuidora da mensagem de alta prioridade terá
que esperar ao menos o envio de uma mensagem de
prioridade menor para tomar o barramento para si
novamente.
Comando Distribuído: Comprimento de Preâmbulo
- Variante determinista de CSMA/CD
- A cada mensagem é associado um preâmbulo com
comprimento diferente, que é transmitido com CD
desativada.
- Após término de envio do preâmbulo, CD reativada
- Se há colisão, existe outra mensagem mais
prioritária sendo enviada e estação fica a espera de
meio livre.
Comando Distribuído: Comprimento de Preâmbulo
Preambulo do frame
Frame a enviar
Nó 4
Nó 0
Nó 1
Nó 2
Nó 3
Comando Distribuído: Comprimento de Preâmbulo
Mensagem do nó 4
Mensagem do nó 3
Mensagem do nó 2
Mensagem do nó 1
Mensagem do nó 0
Instantes de inicio de detecção de colisão em cada estação
Comando Distribuído: CSMA/DCR
-
CSMA with Deterministic Collision Resolution
-
determinismo garantido através de busca em árvore binária balanceada
-
prioridades são atribuídas a cada estação => “Índices”
-
cada estação deve conhecer:
-
-
status do barramento:
-
livre
-
ocupado com transmissão
-
ocupado com colisão
-
seu próprio índice
-
número total de índices consecutivos alocados às fontes (Q)
tamanho da árvore binária q = menor potência de 2 maior ou igual a Q
(ex.: Q = 12, q = 16)
CSMA/DCR
-
operação como CSMA/CD até colisão
-
em caso de colisão, iniciado período de resolução por busca em árvore
binária => “época”
-
estações envolvidas se auto-classificam em dois grupos: Winners
(W) ou Losers (L):
-
W = índices entre [0,q/2[
-
L = índices entre [q/2, q]
-
estações do grupo W tentam nova transmissão
-
se nova colisão, nova divisão em grupos:
-
W = [0,q/4[
-
L = [q/4, q/2]
CSMA/DCR
-
se não ocorrer nova colisão (só sobrou uma estação no grupo W),
estação transmite seu frame de dados
-
estações do grupo L desistem e aguardam término de transmissão
bem sucedida de outro nó seguida de meio livre
-
se grupo W vazio, busca revertida => nova subdivisão de nós a
partir do último grupo L:
-
W = [q/2, 3q/4[
-
L = [3q/4, q]
-
Época encerrada quando todas as estações envolvidas na colisão
original conseguiram transmitir seus dados
-
tempo de duração de uma época pode ser calculado => determinismo !
-
seqüência de concessão de direito de acesso ao meio = seqüência de
índices crescentes => nós mais prioritários transmitem primeiro !
CSMA/DCR - Exemplo
Índice 3
Índice 2
Índice 12
Índice 14
Índice 5
Índice 15
-
6 estações de uma rede com 16 fontes enviam frames simultaneamente
-
Índices de cada estação conforme figura acima
-
Q = 16
-
q = 16 (24)
-
altura da árvore binária = log2 16 = 4
CSMA/DCR - Exemplo
[0,15]
1
[8,15]
[0,7]
9
2
[0,3]
[4,7]
[8,11]
3
6
10
4
5
7
8
[0,1]
[2,3]
[4,5]
[6,7]
[12,15]
13
11
12
[8,9]
[10,11]
14
15
[12,13] [14,15]
Árvore binária balanceada completa para Q = 16
CSMA/DCR - Exemplo
0C
2,3,5,12,14,15
W= 2,3,5
L=12,14,15
8C
12,14,15
W=
L=12,14,15
1C
2,3,5
W= 2,3
L=5
2C
2,3
W=
L=2,3
7T
5
4C
2,3
W=2
L=3
3V
5T
2
10 C
12,14,15
W= 12
L=14,15
9V
12 C
14,15
W= 14
L=15
11 T
12
6T
3
Evolução do algoritmo
13 T
14
14 T
15
CSMA/DCR
-
-
O tempo até o inicio da transmissão da fonte com índice 5 será:
-
4 colisões + 1 vazio = 5. slot-time
-
2 transmissões = 2.(tamanho quadro em slot-times)
Assumindo que cada quadro tem um tamanho fixo de 6 slot-times e considerando 1
slot-time como 40 microssegundos, o tempo para início da transmissão da
mensagem da fonte com índice 5 seria:
-
-
-
Tinicio 5 = 5.40 + 2.6.40 = 680 microssegundos (não é ainda pior caso)
O tempo de duração total da época será:
-
7 colisões = 7.slot-time
-
2 vazios = 2. slot-time
-
6 transmissões = 6 .(tamanho do quadro em slot-times)
Assumindo 1 slot-time = 40 microssegundos:
-
T época = 7.40 + 2.40 + 6.6.40 = 1800 microssegundos = 1.8 ms
CSMA/DCR
-
Cálculo do tempo de pior caso pode ser formalizado como
segue...
-
Seja:
− ϕ (v) = número de ramos da árvore binária percorridos por
uma mensagem proveniente de um nó com índice v
-
q = menor potência de 2 maior ou igual ao maior índice
disponível
− σ (v) = número de potências de 2 contidas em v
-
s = 1 slot-time (2 vezes o tempo de propagação do sinal na
rede)
− μ = tempo máximo de transmissão da uma mensagem no
meio físico (depende do comprimento da mensagem em
bits e da taxa de transmissão)
CSMA/DCR
-
-
-
Para uma mensagem participando de uma dada época, temos que:
−
ϕ (v) = log2 q + v - σ(v)
-
Tespera (v) = ϕ (v).s + v.μ
Para o exemplo anterior, tomando uma mensagem da estação com
índice 5, temos:
-
q =16
-
v =5
−
σ (5) = 2
−
ϕ (5) = log2 16 + 5 - 2 = 7
-
T espera (5) = 7.s + 5.μ
(5 = 22+20)
Assumindo s = 40 microssegundos e μ = 6.s = 240 microssegundos,
obteremos para o pior caso de tempo de espera da mensagem da fonte
com índice 5 o valor de 1480 microssegundos.
CSMA/DCR
-
O tempo de duração da época, no pior caso, é dado por:
T época = ϕ (q-1).s + Q.μ
-
Para uma mensagem que chega a fila de emissão de uma fonte com
índice v em um instante qualquer, o pior caso de tempo de espera é
maior, pois a nova mensagem pode chegar na fila imediatamente após
o inicio de uma época, da qual ela ainda não faz parte.
-
Neste caso, o pior caso do tempo de espera será dado por:
T max espera (v) = T época + ϕ (v).s + v.μ
Abordagens Para CTR
Abordagem
Atribuição de Prioridades com teste de
escalonabilidade
Off-line (em tempo
de projeto)
Circuito Virtual TR
com escalonamento
On-line de
mensagens
Reserva com
escalonamento
global
Requistos
Ex.de Protocolos
MAC com resolução
de prioridades
Token-Ring c/Pr.
Dif. atrasos
Comp. Preâmbulo
Forcing Headers
(CSMA/CA)
MAC com tempo de
acesso ao meio
limitado
Requer cópias locais
de todas as filas de
mensagens,
difundidas em “slots
times” de reserva
TDMA
Token-Passing
Waiting Room
CSMA/DCR
PODA
b) Confiabilidade
-
Em aplicações industriais, erro de 1 bit pode ter conseqüências
desastrosas => dispositivos ON/OFF.
-
Para aumentar confiabilidade, enlace usa teste cíclico de
redundância (CRC - Cyclic Redundancy Check) sobre quadros
(técnica polinomial).
-
Em sistemas que necessitem de uma operação contínua, pode
ser utilizado um meio de transmissão e estações redundantes.
-
Recomenda-se usar cabos blindados em ambientes com fortes
campos magnéticos.
-
Uso crescente de fibra ótica.
c) Requisitos do Meio Ambiente
-
Perturbações eletromagnéticas requerem escolha adequada do meio
de transmissão.
-
Fonte: acionamentos de motores elétricos de grande porte, fontes
chaveadas, estações de solda, conversores estáticos, etc.
Sensibilidade à
perturbações
Par trançado (assíncrono)
Par trançado (síncrono)
Cabo coaxial
Fibra Ótica
Distância
Custos
Taxa
de
transmissão
Suportes de Transmissão
- Com guia físico
- Cabos elétricos
- Par trançado
- Cabo coaxial
- Fibra ótica
- Sem guia físico:
- Ondas de rádio
- Ondas de luz (laser, infravermelho)
Par Trançado (Twisted Pair)
- forma mais barata e clássica de conexão
- cabo composto de “n” pares de fios de cobre
isolados e arranjados de forma helicoidal
- Efeito do arranjo helicoidal => reduzir induções
eletromagnéticas parasitas => fios paralelos
formam antena !
- Categoria 3: telefone, LAN
- Categoria 5: isolamento teflon, LAN
- Usados com HUBs, Switchers
Par Trançado (Twisted Pair)
- Servem para transmissão analógica e digital
- Usados na rede telefônica e em LANs
- Taxas de transmissão de dezenas de Kbps até ~100 Mbps
(distâncias pequenas)
- Banda passante depende de:
- diâmetro fios
- pureza cobre
- isoladores
- comprimento do cabo
Par Trançado (Twisted Pair)
Conector RJ45
UTP
Par Trançado Blindado (STP)
Cabos Coaxiais
•2 tipos mais usados: impedância de 50 Ohms (sinais digitais,
baseband versões thin e thick) e 75 Ohms (sinais analógicos,
broadband)
•Constituídos de 2 condutores concêntricos separados por
isolante
Capa
protetora
Capa
isolante
Alma de cobre
Trança
metálica
Cabos Coaxiais
- Possuem melhores características elétricas do que par trançado =>
menos sensíveis a interferências eletromagnéticas
- Usados para distâncias de até 1Km => taxas de transmissão de 1 a
2 Gbps em banda base possíveis
- Usados para distâncias maiores (100Km) se usada transmissão
analógica (broadband com modulação ASK, FSK ou PSK)
- Muito usados para transmissão em banda larga => vários canais
simultâneos de comunicação em faixas de freqüência diferentes
- Requerem terminadores => impedâncias terminais para impedir
ressonâncias na rede
Cabos Coaxiais
Cabo com conectores BNC (British
Naval Connector ou Bayonet Neil
Concelman ou Bayonet Nut Connector)
Fibras Óticas
- Sinais binários transmitidos como impulsos luminosos:
- lógico 1 => presença de luz
- lógico 0 => ausência de luz
- Pode transmitir sinais com taxas de vários Gbps (109 bps) a
distâncias de até 100Km sem repetidores.
- Imune a perturbações eletromagnéticas => fóton sem carga
elétrica
- Fibra => fio de silício (núcleo) com capa externa para retenção
de luz
Fibras Óticas
- sistema de transmissão composto de 3 elementos:
- Fibra: transmite sinal ótico
- Emissor: converte sinal elétrico em ótico (LED ou diodo Laser)
- Receptor: converte sinal ótico em elétrico (Fotodiodo ou
Fototransistor)
i
E
fibra
R
i
Fibras Óticas
- Princípio de transmissão na fibra:
- ângulo de incidência grande => reflexão e refração
- ângulo de incidência pequeno => reflexão total
Ar
β1
α1
β2
α2
β3
fonte de
luz
α3
Silício
multimodo
monomodo
Fibras Óticas
• Fibra multimodo com índice degrau: núcleo constituído de um único
tipo de material (plástico, vidro) e tem índice de refração constante. Os
raios de luz refletem no cladding em vários ângulos, resultando em
comprimentos de caminhos diferentes para o sinal. Isto causa o
espalhamento do sinal ao longo da fibra e limita a largura de banda do
cabo. Este fenômeno é chamado dispersão modal. A atenuação é elevada
(maior que 5 dB/km), fazendo com que essas fibras sejam utilizadas em
transmissão de dados em curtas distâncias (até 2 km).
Fibras Óticas
• Fibra multimodo com índice gradual: a interface núcleo/cladding é
alterada para proporcionar índices de refração diferentes dentro do núcleo e
do cladding. Os raios que viajam na direção do cabo tem um índice de
refração menor e são propagados mais rapidamente. O objetivo é ter todos
os modos do sinal à mesma velocidade no cabo, de maneira a reduzir a
dispersão modal. Essa fibra pode ter larguras de banda de até 500 Mhz.km.
O núcleo tem, tipicamente, entre 125 e 50 μm e a atenuação é baixa (3
dB/km), sendo por esse motivo empregada em telecomunicações.
Fibras Óticas
• Fibras monomodo: O núcleo de 8 µm de diâmetro e o índice
núcleo/cladding permite que apenas um modo seja propagado através da
fibra, diminuindo a dispersão do pulso luminoso. A emissão de sinais
monomodo só é possível com laser, podendo atingir taxas de transmissão
na ordem de 100 GHz.km, com atenuação entre 0,2 dB/km e 0,7 dB/km.
Contudo, o equipamento como um todo é mais caro que o dos sistemas
multimodo. Essa fibra possui grande expressão em sistemas telefônicos.
Fibras Óticas
Conectores ST
para fibra ótica
Feixe de fibras óticas
Cabo multimodo
62.5/125 micrometros
Fibras Óticas
- Muito usadas em WAN, MAN e CAN
- Uso crescente em LAN, com topologia ponto-a-ponto => difícil
realizar derivações (bifurcações) em T para barramento
- Técnicas de realização de derivações:
- derivação passiva: usa princípios óticos (p.ex. prismas) =>
problemas de perda de intensidade luminosa
- derivação ativa: converte sinal ótico para elétrico
nos pontos de derivação => aumenta custo, requer
alimentação, perde velocidade e introduz pontos sensíveis à
perturbações eletromagnéticas
- Muito usadas com HUBs e Switchers
Transmissão Sem Guia Físico
- Sistemas com guia físico implicam na construção de
canalização ou postes para condutores => caro para grandes
distâncias
- Técnicas com emissor e receptor de luz direcionados:
- Laser
- Infravermelho
- Bom para distâncias médias
- Técnicas com sinal de rádio:
- antena / antena => distâncias médias ou grandes
- antena / satélite / antena => distâncias muito grandes
Transmissão Sem Guia Físico
Sinais de Rádio:
Vantagens:
- Flexibilidade
- Interconexão completa
- Estações móveis
Limitações / compromissos:
- Banda passante
- área de cobertura
- interferências
Desvantagens:
- regulamentações
- Problema de autenticação
- custos
- Privacidade
- Dependência de regulamentação
pública
Meio de Transmissão
Meio
Sinalização
Bitrate (max.)
Distancia*
(p. Bitrate max.)
Par trançado
Digital
10Mbps (CAT-3)
16Mbps (CAT-4)
100Mbps (CAT-5)
300 Mbps (STP)
100m
100m
100m
100m
Cabo coaxial
Digital
Analógica
2 Gbps
3 Mbps
1 Km
100 Km
Fibra ótica
Digital
1 Gbps
1 Tbps
100 Km
1 Km
Rádio
VLF, LF, MF
Microwave
50 Mbps (telecom.)
50 Kbps (celular)
54 Mbps (rede)
1000 Km
50 Km
100 m
* Sem repetidores
Meios de Transmissão
- Cabo coaxial:
- Boas características elétricas, porém caro.
- Requer impedâncias terminais.
- Conectores BNC fáceis de abrir.
- Par trançado:
- Usualmente usado com HUB/Switcher
- Atualmente solução mais usada para chão fábrica.
- UTP (Unshielded Twisted Pair) CAT-5 / STP (Shielded Twisted Pair).
- Fibra ótica:
- Ótimo para rejeitar perturbações eletromagnéticas.
- Dificuldade de realizar topologia em barramento (bus). Mais usado em topologias
ponto a ponto: anel, estrela, árvore. Emulação de bus com HUB ou Switcher.
Áreas de Risco (Segurança Intrínseca)
•
•
•
•
•
Sujeitas a incêndio, explosão
Presença de líquidos ou gases inflamáveis/explosivos
Não pode haver faiscamento
Freqüência de sinais elétricos limitada
Modelo FISCO (Fieldbus Intrinsically Safe Concept):
desenvolvido na Alemanha pelo PTB
(Physikalisch Technische Bundesanstalt) e
reconhecido mundialmente como modelo básico para
operação de redes em áreas de risco de explosão ou
incêndio.
•
Áreas de Risco (Segurança Intrínseca)
Princípios de transmissão segundo modelo FISCO:
– Cada segmento possui uma única fonte de alimentação.
– Não se alimenta o barramento enquanto uma estação está
enviando.
– Cada dispositivo de campo consome uma corrente constante
em steady-state de pelo menos 10 mA, que alimenta o
dispositivo.
– Os dispositivos de campo funcionam como uma carga
passiva de corrente.
– Existe uma terminação passiva em ambos os extremos da
rede.
– Topologias permitidas: linear, em árvore e em estrela.
Áreas de Risco (Segurança Intrínseca)
• Norma IEC 1158-2 para camada física:
– Transmissão de dados: digital, bit - síncrona, Manchester
– Taxa de transmissão: 31,25 kbit/s, modo voltagem
– Cabo: STP com 2 fios
– Alimentação remota: opcional, via linhas de dados
– Classes de proteção contra explosão: Intrinsically safe
(EEx ia/ib) e encapsulation (EEx d/m/p/q)
– Topologias: linha e árvore ou uma combinação
– Numero de estações: até 32 estações por segmento,
máximo de 126 com 4 repeaters
d) Tipo de mensagens
• Níveis hierárquicos superiores da fábrica:
¾ mensagens grandes (KByte)
¾ podem ter tempos de transmissão longos
¾ longos intervalos entre transmissões (meio ocioso)
• Níveis hierárquicos mais próximos ao processo:
¾ mensagens curtas, tais como:
9 ligar ou desligar uma unidade ON/OFF -> 1 bit
9 fazer leitura de um sensor / medidor -> 8 Bytes
9 alterar o estado de um atuador -> 8 Bytes
9 verificar o estado de uma chave ou relê - > 1 bit
¾ Taxa de ocupação do barramento elevada (grande número de
quadros pequenos transmitidos).
d) Tipo de mensagens
• Requisitos:
- Taxa de transmissão de dados na camada física não precisa ser
muito elevada
- Mais importante ter tempo de entrega conhecido do que taxa de
transmissão muito alta
- Desejável protocolo MAC que não permita colisões
- Na especificação do protocolo de enlace, é desejável que o
frame seja pequeno (envelope grande para carta pequena não é
eficiente!). Por exemplo:
¾ Frame Ethernet pode ter até 1500 Bytes de dados, mais 14
Bytes de outros campos
¾ Frame CAN pode ter até 8 Bytes de dados, mais 8 Bytes de
outros campos
e) Conectividade / interoperabilidade
(padronização)
• Identificou-se na década de 80 necessidade de uma especificação
de redes locais para aplicações industriais diferente daquela
adotada em automação de escritório.
• Surgiram diversas redes proprietárias para ambiente fabril, mas
não permitem a interligação de equipamentos de outros
fabricantes.
• Maior entrave à conectividade e interoperabilidade: não
padronização das interfaces e protocolos de comunicação.
• Grandes esforços tem sido despendidos para solucionar estes
problemas => Projetos de Padronização.
•
Projetos de Padronização
de redes industriais
Iniciativas mais importantes de padronização para
redes industriais:
- Projeto PROWAY
- Projeto IEEE 802
- Projeto MAP (MAP/EPA e MINI-MAP)
- Projeto TOP
- Projeto FIELDBUS
Projeto PROWAY
-
Proposta PROWAY (Process Data Highway) iniciada em 1975 pela IEC
(International Electrotechnical Commission) para a normalização de
redes de comunicação para controle de processos.
-
Proway passou pelas fases A, B e C.
-
Proway A e B utilizavam o protocolo HDLC da ISO na camada de
enlace, com acesso ao meio tipo Mestre / Escravos.
-
Proway C adotou a técnica de Token-Passing.
-
Arquitetura composta de 4 camadas do modelo OSI:
- "Line" (camada física),
- "Highway" (camada de enlace),
- "Network" (camada de rede) e
- "Application" (camada de aplicação)
Projeto IEEE 802 (ISO/IEC 8802)
-
IEEE (Institute of Electrical and Electronics Engineers) iniciou em
1980 o projeto 802, que definiu normas para as camadas Física e
Enlace do modelo de referência OSI.
-
Camada de Enlace subdividida em duas subcamadas:
-
-
LLC (Logical Link Control): montagem dos quadros, controle
de erros, controle de fluxo, estabelecimento de conexões,
serviços às camadas acima;
-
MAC (Medium Access Control): Controle de acesso ao meio.
Proposta IEEE virou norma internacional: ISO/IEC 8802.
IEEE 802 (ISO/IEC 8802)
• IEEE 802.1: serviços de gerenciamento de redes e
generalidades;
• IEEE 802.2: sub-camada LLC da camada de Enlace. Norma
prevê três tipos de serviços:
• LLC tipo 1 (Sem Conexão e Sem Reconhecimento): não é
feito controle de erros nem de fluxo e o receptor das
mensagens não envia um quadro de reconhecimento ao
emissor;
• LLC tipo 2 (Com Conexão): antes de trocar dados, estações
estabelecem uma conexão entre si. É feito controle de erros e
de fluxo e a entidade receptora envia um quadro de
reconhecimento para cada mensagem recebida;
• LLC tipo 3 (Sem Conexão mas com Reconhecimento):
comunicação sem conexão, mas é realizado controle de fluxo
e de erros e o receptor envia um quadro de reconhecimento
ao emissor para cada mensagem recebida.
IEEE 802 (ISO/IEC 8802)
• IEEE 802.3 : descrição da sub-camada MAC e camada Física
para redes com topologia em barramento e método de acesso ao
meio baseado em CSMA/CD;
• IEEE 802.4 : descrição da sub-camada MAC e camada Física
para as redes com topologia em barramento e método de acesso
ao meio baseado em "token-passing" (Token-Bus);
• IEEE 802.5 : descrição da sub-camada MAC e camada Física
para as redes com topologia em anel e método de acesso ao meio
baseado em "token-passing" (Token-Ring);
• IEEE 802.6 : descrição da sub-camada MAC e camada Física
para as redes metropolitanas com DQDB (Distributed Queue
Dual Bus, barramento dual com filas distribuídas);
• IEEE 802.7 : contém recomendações do IEEE para LANs
usando Broadband. Na versão da ISO/IEC, define uma
subcamada MAC com slotted ring e a camada física
correspondente;
IEEE 802 (ISO/IEC 8802)
•
•
•
•
•
IEEE 802.8 : o IEEE criou o “Fibre optic technical advisory
group”, cuja meta era propor um padrão de LAN usando fibra
ótica como meio físico em redes com token passing, como
FDDI (Fiber Distributed Data Interface);
IEEE 802.9 : IS (Integrated Services) para integrar LANs
com RDSI (Rede Digital de Serviços Integrados, ISDN em
inglês) e FDDI;
IEEE 802.10 : aborda questões de segurança na interoperação
de LANs e MANs (atualmente define o padrão SDE, Secure
Data Exchange);
IEEE 802.11 : padroniza LANs com MAC sem fio (Wireless)
e a camada física correspondente (transceivers de rádio);
IEEE 802.12 : método de acesso com demanda priorizada
(DPA, Demand Priority Access) e camada física
correspondente.
IEEE 802 (ISO/IEC 8802)
• Mais recentemente foram acrescentados
ainda:
– IEEE 802.15: trata de Wireless Personal Area Networks
(como Bluetooth);
– IEEE 802.16: aborda Wireless Metropolitan Area Networks;
– IEEE 802.17: padrão para Resilient Packet Ring;
– IEEE 802.18: comitê de padrões LAN/MAN.
IEEE 802 (ISO/IEC 8802)
IEEE 802.1 - Aspectos Gerais e Gerenciamento de Rede
IEEE 802.2 - Camada de Enlace
Sub-Camada LLC
(Logical Link Control)
IEEE 802.3
CSMA/CD
(MAC)
Tipo 1 - sem conexão
Tipo 2 - com conexão
Tipo 3 - com reconhecimento
IEEE 802.4
Token Bus
(MAC)
IEEE 802.5
Token Ring
(MAC)
Banda
Larga
Banda
Base
Banda
Larga
Banda
Base
(PHY)
(PHY)
(PHY)
(PHY)
IEEE 802.11
MACA
(MAC)
(PHY)
A norma IEEE 802.3 (CSMA/CD)
-
Origem: rede Ethernet (Xerox, 1976), criada por Robert Metcalf.
-
Ethernet original: protocolo CSMA/CD, cabo coaxial de 1000
metros de comprimento, taxa de transmissão de 3 Mbps, até 100
estações conectadas.
-
Xerox, DEC e Intel definiram um padrão "de fato" para uma rede
Ethernet, com taxa de transmissão de 10 Mbps.
-
IEEE 802.3 (1985) define família de protocolos CSMA/CD 1persistentes, para diferentes meios de transmissão, com taxas de
transmissão originalmente de 1 a 10 Mbps (depois ampliada para
100Mbps, 1Gbps e agora 10Gbps).
-
Parâmetros iniciais da norma: canal de 10 Mbps em banda base,
cabo coaxial de 50 ohms, comprimento máximo 500 m.
Quadro IEEE 802.3
bytes
7
1
PREÂMBULO
2-6
2-6
DEST
FONTE
DELIMITADOR
DE QUADRO
2
0-1500
46
4
DADOS
PAD
FCS
COMPRIMENTO
DOS DADOS
-
Preâmbulo de 7 bytes (seqüência 10101010).
-
Delimitador de Início de Quadro (seqüência 10101011).
-
Endereços de Destino e de Origem, com formatos de 16 ou 48 bits. MSB
define se endereço é individual (0) ou de grupo (1), permitindo multicast
e broadcast.
-
Tamanho do Campo de Dados, em bytes (max. 1500 bytes).
-
FCS: palavra de 32 bits, para o controle de erros por CRC.
-
Se quadro total menor que 64 Bytes, o quadro deve ser completado
através do campo PAD (padding = enchimento, estofamento).
IEEE 802.3 - Arquitetura
LLC (Logical Link Control)
Enlace
MAC (Medium Access Control)
PLS (Physical Layer Signaling)
Física
AUI (Attachment Unit Interface)
MAU (Medium Attachment Unit)
MDI (Medium Dependent Interface)
IEEE 802.3 - Camada Física
• PLS (Physical Layer Signaling): interface entre o nível físico
e a subcamada MAC. Fornece à MAC serviços de envio e
recepção de bits e de detecção de colisão.
• AUI (Attachment Unit Interface): cabos tipo par trançado
blindado que permitem conectar à rede estações localizadas a
uma certa distância do meio de transmissão (até 50m). AUI
interliga a placa de rede ao MAU.
• MAU (Medium Attachment Unit): dispositivo eletrônico que
transmite, recebe e detecta a presença de sinais no meio e deve
estar fisicamente muito próximo a este.
• MDI (Medium Dependent Interface): conector que faz
conexão entre o MAU e o meio físico em si.
IEEE 802.3 - Camada Física
• A norma IEEE 802.3 define várias opções de meio físico e taxa
de transmissão, especificadas da forma:
•
<taxa em Mbps><técnica de sinalização><tamanho máximo do segmento * 100>
Exemplo:
– 10BASE5: define uma camada física com taxa de
transmissão de 10Mbps, técnica de sinalização em banda
BASE (baseband) e comprimento máximo do cabo de 500
metros.
IEEE 802.3 - Camada Física 10BASE5 (thicknet)
MAU
Conector de
pressão MDI
(Vampire tap)
Cabo AUI
Cabo coaxial
grosso 50
Ohms
Placa de rede
Conector AUI
IEEE 802.3 - Camada Física 10BASE2 (thinnet)
Cabo coaxial
fino 50 Ohms
Conector BNC
fêmea
Placa de rede
Conector
BNC macho
Conector T
BNC
Terminador BNC
macho 50 Ohms
IEEE 802.3 - Camada Física
• 10BROAD36: opera com taxa de transmissão de 10Mbps,
técnica de sinalização em Banda Larga e um cabo de 3600
metros.
• Especificações adicionais de MAU:
• 10BASE-T: define MAU para par trançado, usualmente
empregada para conexão com repetidores multiporta (Hubs);
• 10BASE-F: MAU para fibra ótica
• 10BASE-FL: define MAU para fibra ótica, usada para
conectar uma estação a um Hub;
• 10BASE-FB: define MAU para interligar repetidores
entre si, usada em redes backbone;
• 10BASE-FP: define MAU para operar como estrela
passiva.
IEEE802.3 – Camada Física 10BASE-T
Lançada em 1987
HUB
Par Trançado
Placa de rede
Plug RJ-45
IEEE802.3 – Camada Física 10BASE-FL
R
Fibra ótica
Max.
2000m
T
MAU
10BASE-FL
Cabo AUI
R
T
HUB
10BASE-FL
Placa de rede
Conector AUI
IEEE802.3 – Camada Física 10BASE-FP
R
Fibra ótica
Max.
500m
T
MAU
10BASE-FP
Cabo AUI
R
T
Estrela
Passiva
10BASE-FP
Placa de rede
Conector AUI
IEEE802.3 – Camada Física 10BASE-FB
backbone
Fibra ótica
Max. 2000m
R
T
REPEATER
10BASE-FB
R
T
REPEATER
10BASE-FB
IEEE 802.3u – Fast Ethernet
• 3 versões com 100 Mbps, sempre com HUB:
– 100BASE-T4: usa 4 pares de cabos UTP categoria
3 (fio telefônico), com sinalização em 25MHz cada,
com até 100m até HUB, modo half-duplex.
– 100BASE-TX: usa 2 pares de cabos UTP categoria
5 (usa isolante de teflon), um para o HUB e outro
de retorno, até 100m até o HUB, modo full-duplex;
– 100BASE-FX: lançada em 1995, usa 2 fibras óticas
multimodo, uma em cada direção, distância de até 2
Km até HUB.
IEEE802.3 – Switched Ethernet
• Melhora de performance da ethernet pode ser obtida com fast
ethernet, porém requer novas placas de rede
• Outra solução: manter placas 10BASE-T e ligar a um switcher
(lançado em 1997)
LC
switcher
Placas
10BASE-T
(hoje
100BASE-TX)
IEEE802.3 – Switched Ethernet
• Ainda pode haver colisão no SW se mensagens tem
mesmo destino
• Solução adotada hoje: alocar buffers para enfileirar
mensagens que tem mesmo destino
• Cálculo de tempo ainda problemático se porta de saída
sobrecarregada (overflow)
• Novos SW enviam pacote PAUSE para emissores se
buffer de saída lotado
• Ok para pacotes unicast (só um destinatário)
• Ainda há problemas de não determinismo em pacotes de
multicast e broadcast!
Gigabit Ethernet
• IEEE802.3z 1000BASE-F: lançada em 1998, opera a
1 Gbps, em banda base sobre fibra ótica com
concentrador.
• IEEE802.3ab 1000BASE-T: idem para par trançado.
• IEEE 802.3ae: em andamento, define uma rede de 10
Gbps.
A norma IEEE 802.4 (Token Bus)
-
define topologia tipo barramento, com direito de transmissão
transmitido por meio de ficha/bastão.
-
Inicialização: passagem da ficha se dá segundo ordem
descendente do valor do endereço físico das estações.
-
Estação proprietária da ficha possui o direito exclusivo de
transmissão sobre o barramento.
-
Este direito pode ser exercido durante um certo período de
tempo ("token retention time"), após o qual ela deve ceder a
ficha para a próxima estação do "anel" lógico.
-
Protocolo define mecanismo de prioridades de quatro níveis,
referenciados por 0, 2, 4 e 6 (nível 0 tem a mais baixa prioridade
e o nível 6 a mais alta prioridade).
IEEE 802.4 – Inserção e Remoção de Nós
-
Periodicamente, a estação com token consulta estações inativas para
verificar se querem fazer parte do anel lógico (quadro “Solicit_Sucessor").
-
Quadro indica endereço da estação emissora e o da estação seguinte no anel
lógico. Apenas as estações cujos endereços estiverem entre os dois
endereços podem candidatar-se à participação no anel lógico.
-
Se houver mais de um candidato, haverá colisão, resolvida por um
algoritmo de arbitragem executado pelo detentor do token (quadro
“Resolve_Contention”).
-
Se nenhuma estação apresenta interesse, a estação proprietária da ficha
retoma a evolução normal do anel.
-
Se só uma estação apresenta-se como candidata, ela passa a compor o anel
lógico e torna-se a próxima destinatária da ficha.
-
Se uma estação B situada entre duas estações A e C quer abandonar o anel
lógico, ela envia à estação A um quadro indicando que a sucessora de A
será a estação C (quadro “Set_Sucessor”).
Quadro IEEE 802.4
bytes 1 1 1
2-6
2-6
DEST
FONTE
0-8182
DADOS
CONTROLE DE QUADRO
DELIMITADOR DE INÍCIO
PREÂMBULO
4
FCS
DELIMITADOR DE FIM
-
Preâmbulo (sincronização a nível de bit);
-
Delimitador de Início de Quadro;
-
Controle de Quadro: quadros de dados ou de controle;
-
Endereço Destino e Origem codificados em 16 ou 48 bits;
-
campo de Dados (até 8182 bytes de comprimento);
-
FCS: campo de Controle de erros por CRC;
-
Delimitador de Fim de Quadro.
1
IEEE 802.4 – Opções de Camada Física
• Rede com canal único e modulação FSK (Frequency Shift
Keying) fase contínua, com topologia em barra bidirecional, taxa
de transmissão de 1Mbps;
• Rede com canal único e modulação FSK fase coerente, topologia
em barra bidirecional, taxas de transmissão de 5Mbps ou
10Mbps;
• Rede em banda larga, topologia em barra bidirecional com
headend (central repetidora com conversor de freqüências do
canal de recepção para o canal de envio), taxas de transmissão de
1Mbps, 5Mbps ou 10Mbps;
• Rede utilizando fibra ótica, topologia lógica em barra (mas
fisicamente em estrela, com um Hub como elemento central),
requer um par de fibras para cada estação (uma para receber e
outra para transmitir), taxas de transmissão de 5Mbps, 10Mbps
ou 20Mbps.
A norma IEEE 802.5 (Token Ring)
-
Rede em anel: conjunto de ligações ponto-a-ponto, em modo
unidirecional.
-
Cada nó do anel é equipado de um acoplador.
-
Cada bit é copiado numa memória de espera do acoplador
antes de ser retransmitido ao nó seguinte.
-
Token fica circulando quando não existe transmissão de
quadro.
-
Quando uma estação quer emitir um quadro, ela deve adquirir
o token e substituí-lo pelo quadro a enviar.
-
Como apenas uma ficha está circulando no anel, a emissão de
um quadro é ação exclusiva de uma única estação.
IEEE 802.5
estação
interface
para anel
anel
unidirecional
IEEE 802.5
IEEE 802.5
• Token-ring com wire center (hub) – parece topologia
em estrela (mas não é)!
Quadro IEEE 802.5
1 11
2-6
2-6
ilimitado
4
DEST
FONTE
DADOS
FCS
CONTROLE DE QUADRO (FC)
CONTROLE DE ACESSO (AC)
DELIMITADOR DE INÍCIO (SD)
11
DELIMITADOR DE FIM (ED)
STATUS QUADRO (FS)
•
Status do Quadro: composto de bits A (Ativo) e C (Copiado).
•
Valores dos bits A e C:
-
A = 0 e C = 0: o destinatário está inativo e quadro não foi
copiado;
-
A = 1 e C = 0: o destinatário está ativo mas o quadro não foi
copiado;
-
A = 1 e C = 1: o destinatário está ativo e o quadro foi copiado
(serve como acknowledge).
IEEE 802.5 - Camada Física
• Segmentos com par trançado blindado (STP):
– 4 ou 16Mbps
– até 250 repetidores no anel
• Segmentos com par trançado comum (UTP):
– 4Mbps
– até 250 repetidores no anel
• Bits codificados em Manchester diferencial.
IEEE 802.11 - Introdução
• Redes sem fio podem usar:
– Rádio
– Laser
– Infravermelho
• Boa alternativa para aplicações onde é
difícil instalar cabos.
•
Introdução
Emprego:
– computadores portáteis em um ambiente
de rede local móvel;
– onde rompimento de um cabo pode
paralisar todo o sistema;
– chão de fábrica: AGVs (Automatic Guided
Vehicles), Robôs Autônomos Móveis e
Sensores Inteligentes.
Introdução
• Em 1986 o FCC (Federal Communications
Commission) autorizou utilização da
tecnologia de transmissão em rádio freqüência
"Spread Spectrum"
• Até então esta tecnologia era de uso exclusivo
Militar.
• Foi desenvolvida para utilização em casos de
Guerra por sua alta imunidade a interferências
e por ser difícil de interceptar transmissão.
Arquitetura Wireless e o RM-OSI
Conceitos básicos
• Redes sem fio dividem a área coberta pela rede em
células.
• Células são denominadas BSA (Basic Service Area).
• O tamanho da BSA (célula) depende das características
do ambiente e da potência dos transmissores/receptores
usados nas estações.
• O sinal emitido por uma estação com uma potência de
100mW cobre uma área de 500 m2.
• Áreas maiores podem ser cobertas decompondo a rede
em várias células.
Conceitos básicos
• Em uma célula podemos identificar dois
tipos de dispositivos:
– Estação remota ou Cliente: é a unidade
móvel, onde o usuário se instala
– Ponto de acesso (AP): possui a função de
gerenciar o transporte de informação “das e
para as” estações remotas.
Conceitos básicos
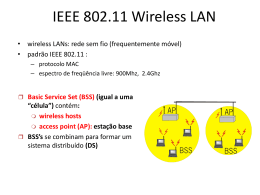
• BSS (Basic Service Set) – representa um grupo de estações
comunicando-se por radiodifusão ou infravermelho em uma BSA.
• Ponto de acesso (Access Point – AP) – são estações especiais
responsáveis pela captura das transmissões realizadas pelas
estações de sua BSA, destinadas a estações localizadas em outras
BSAs, retransmitindo-as, usando um sistema de distribuição.
• Sistema de distribuição – representa uma infra-estrutura de
comunicação que interliga múltiplas BSAs para permitir a
construção de redes cobrindo áreas maiores que uma célula.
• ESA (Extend Service Area) – representa a interligação de vários
BSAs pelo sistema de distribuição através dos APs.
• ESS (Extend Service Set) – representa um conjunto de estações
formado pela união de vários BSSs conectados por um sistema de
distribuição.
Conceitos básicos
Conceitos básicos
• Potência do sinal de rádio decai com o quadrado da
distância do emissor.
• Pode-se reutilizar a mesma freqüência de transmissão
para estações em BSAs diferentes, desde que estejam
suficientemente distantes.
• Para construir redes cobrindo áreas maiores, BSAs são
interligadas por um sistema de distribuição, que consiste
de uma rede usando meio físico convencional.
Conceitos básicos
AP
Host ou Servidor
de Aplicações
Wireless Clients
Rede fixa
Modos de operação
• Ad Hoc mode: rede sem infra-estrutura
onde estações se comunicam numa mesma
célula, sem necessidade dos APs.
• Infrastructure mode: quando existe um
AP coordenando a comunicação entre as
estações de uma célula.
Modos de operação
Serviços do Sistema de Distribuição (DSS)
• Associação: Antes da estação poder transmitir ou
receber quadros, sua identidade e endereço devem ser
conhecidos. Para tal, a estação deve estabelecer uma
associação com o AP de uma BSS em particular.
• Reassociação: habilita uma associação estabelecida
para ser transferida de um AP para outro, permitindo
que a estação móvel possa se mover de uma BSS para
outra (roaming);
• Dissociação: notificação oriunda do AP ou da estação
de que a associação existente está terminada. Esta
notificação deve ser feita antes da estação deixar o ESS
ou ser desligada;
Serviços do Sistema de Distribuição (DSS)
• Distribuição: serviço primário usado pelas estações
para trocar quadros MAC quando estes devem
atravessar o sistema de distribuição, passando de uma
estação em um BSS para uma estação em outro BSS.
Neste caso, o quadro obrigatoriamente deve passar pelo
AP da primeira BSS, depois pelo sistema de
distribuição, chegar ao AP da BSS destino e finalmente
repassa à estação receptora;
• Integração: responsável pela transferência de dados
entre uma estação na rede IEEE 802.11 e outra estação
de uma rede 802.x integrada (rede cabeada fisicamente
anexada ao sistema de distribuição e cujas estações são
logicamente conectadas a rede 802.11 via serviço de
integração).
Serviços de Estação (SS)
• Autenticação: serviço com o qual as estações
estabelecem sua identidade com as estações que desejam
se comunicar.
• Desautenticação: serviço que finaliza uma autenticação;
• Privacidade: serviço que previne a leitura de conteúdos
das mensagens por entidades que não sejam as
receptoras intencionadas. O padrão prove o uso opcional
de criptografia para assegurar a privacidade;
• Entrega MSDU: A entrega de MSDU assegura-se de
que a informação na unidade de dados do serviço do
MAC seja entregue entre os APs do serviço de controle
de acesso ao meio.
AP (Ponto de acesso)
• Desempenha as seguintes funções:
– Autenticação, associação e reassociação: permite
que uma estação móvel, mesmo saindo de sua célula
de origem, continue conectada à infra-estrutura e
não perca a comunicação (handoff).
– gerenciamento de potência: permite que as estações
operem economizando energia, através de um modo
chamado power save.
– Sincronização: garante que as estações associadas a
um AP estejam sincronizadas por um relógio
comum.
Camada 1: Bandas de Rádio
• Bandas de freqüência ISM (Industrial, Scientific and
Medical) e UNII (Unlicensed National Information
Infrastructure)
• Podem ser utilizadas sem que seja necessária uma
licença.
– ISM1: banda 902 até 928 MHz.
– ISM2: 2.4 até 2.48 GHz.
– ISM3: 5.75 até 5.85 GHz.
– UNII usa 5.2 GHz
•
Camada 1: Modulação
• Transmissão por radio de microondas usa
tecnologia de Espalhamento Espectral (Spread
Spectrum)
• Duas formas de modulação:
– FHSS (Frequency Hopping Spread Spectrum):
Espalhamento espectral com saltos de Freqüência,
banda dividida em 79 canais.
– DSSS (Direct Sequence Spread Spectrum):
Espalhamento espectral em Seqüência Direta,
banda dividida em 11 canais.
Ponto de Acesso Ethernet
• interliga equipamentos sem-fio e a rede local cabeada.
• Ligação à Ethernet por UTP
Características da Comunicação por RF
•Freqüência de operação: 2.4 a 2.48 GHz
• FH em 79 canais ou DS em 11 canais (3 sem
sobreposição).
• Potência de Transmissão: 500mW (FH) ou 100 mW (DS)
• Antena: Externa, permite uso de duas antenas para melhor
recepção (diversidade).
• Alcance: Maior que 300m em ambientes abertos; 55 a 95m
em ambientes típicos de escritório, industriais , depósito ou
varejo. Links repetidores a km de distância, com o uso de
antenas adequadas.
Roaming
• Para se agrupar um maior número de estações utilizase a arquitetura celular.
• Sistema permite o "roaming" ao usuário: caso ele saia
do alcance de seu Access Point ele automaticamente
conecta-se ao próximo, e assim sucessivamente até
retornar ao seu ponto de origem.
Roaming
• A função do roaming funciona da seguinte forma:
– Uma estação móvel, ao entrar em uma nova célula, e não
estando em conversação, registra-se automaticamente pelo
AP que controla a célula destino.
– Na célula visitada, o AP irá verificar se a estação móvel
visitante não havia se registrado anteriormente. Caso esse
procedimento não tenha sido efetuado, o referido AP irá
informar ao AP da célula origem sobre a nova posição.
– Com isso, o AP da célula origem fica sabendo da nova
posição da estação móvel, e envia a informação a ela
destinada, como se a referida estação estivesse em sua própria
célula.
Gerenciamento de energia
• Dispositivos móveis tem restrições de tempo da bateria
• Estação cliente móvel usa “sleep mode”.
• Mensagens para a estação em sleep mode são
armazenadas no AP.
• AP executa procedimento TIM (Traffic Information
Message):
– AP informa as estações se existe alguma mensagem.
– Estações tem que “acordar” por uma fração de tempo para
escutar o TIM.
– Uma vez que não haja mensagem direcionada à elas, estas
voltam ao sleep mode.
– Havendo mensagem ocorre o recebimento da mesma por
parte da estação cliente direcionada.
Desvanecimento de Rayleight
• Problema típico das redes de rádio
• Parte das ondas de rádio são refletidas quando
encontram objetos sólidos.
• Em decorrência desta reflexão, várias cópias de
uma mensagem de rádio podem estar em
propagação no meio e chegar a estação
receptora em instantes de tempo diferentes.
Desvanecimento de Rayleight
Desvanecimento de Rayleight
• Quando as várias cópias do sinal chegam ao receptor
após percorrerem distancias diferentes, elas se somam
aleatoriamente, podendo resultar em um sinal muito
enfraquecido ou mesmo nulo.
• Se a diferença no comprimento dos caminhos for um
múltiplo do comprimento de onda da portadora do
sinal, os vários componentes podem cancelar-se
mutuamente.
Camada 2: MAC Wireless
• Como várias estações compartilham o meio (rede de difusão) é
necessário utilizar um método de acesso.
• Idéia inicial: utilizar CSMA.
• Problema: alcance do sinal de rádio.
• Um sinal oriundo de A pode alcançar B, mas não alcança C
nem D. Um sinal oriundo de B alcança A e C, mas não D, etc.
A
B
C
D
A
B
C
Raio de alcance
(a)
(b)
(a) estação A transmitindo; (b) estação B transmitindo
D
Hidden Station problem
• Suponha que A está enviando dados para B:
– Se C escutar o meio, não irá detectar que A esta enviando.
– C pode tentar enviar um quadro para B, mas como B está no
alcance de C, o quadro enviado por A irá colidir com o
quadro enviado por C a nível de B.
• O fato de uma estação não poder detectar que o meio não está
livre porque o concorrente está fora de alcance é chamado de
"problema da estação escondida" (hidden station problem).
A
B
Raio de alcance
C
D
Exposed Station problem
• Se B estiver transmitindo um quadro para A, C irá
detectar a transmissão e concluir que não pode
transmitir um quadro para D neste momento.
• Mas, como os receptores de A e D não estão na área
de interferência uma da outra, nada impede que C
envie dados para D enquanto B envia para A !
• Esta situação é conhecida como o "problema da
estação exposta" (exposed station problem).
• O que interessa ao emissor é saber se há ou não
atividade na área do receptor.
A
B
C
D
MAC Wireless
• O DFWMAC (Distributed Foundation Wireless MAC) suporta dois
métodos de acesso: um método distribuído obrigatório, e um
método de acesso centralizado, opcional. Os dois métodos de
acesso podem coexistir.
• No IEEE 802.11, uma função de coordenação é um mecanismo que
determina quando uma estação específica tem permissão para
transmitir.
• Se a função de coordenação for distribuída (Distributed
Coordination Function – DCF), a decisão de quando transmitir é
tomada individualmente pelos nós, o que pode resultar em
transmissões simultâneas.
• Quando a função de coordenação é pontual (Point Coordination
Function – PCF), a decisão é centralizada em um ponto, que
determina qual estação deve transmitir em que momento, evitando a
ocorrência de colisões.
MAC Wireless
• DCF usa protocolo CSMA/CA (Carrier Sense Multiple Access with
Collision Avoidance).
• Emissor deve estimular o receptor a emitir um quadro pequeno que possa ser
detectado pelos seus vizinhos antes de mandar os dados.
• B quer enviar um quadro para C:
– (a) B escuta o meio e se estiver livre, envia para C quadro RTS (Request
To Send), contendo o tamanho do quadro de dados que deseja enviar.
– (b) C responde com quadro CTS (Clear To Send), contendo a mesma
informação de tamanho.
• B inicia a transmissão quando recebe o quadro CTS de C.
RTS
A
B
C
CTS
D
A
B
C
D
Raio de alcance de B
Raio de alcance de C
(a)
(b)
MAC Wireless
emissor
receptor
difs
RTS
sifs
CTS
sifs
Difs = distributed
inter frame space
dados
Sifs = short inter
frame space
sifs
tempo
ack
MAC Wireless
• Estação que captar RTS estará próxima a B e deve se manter em
silêncio por tempo suficiente para que B receba o CTS e emita os
dados.
• Estação que captar CTS estará próxima a C e deve também se
manter em silêncio por tempo suficiente para que C receba o
quadro de dados que B vai enviar a seguir, cujo tamanho pode ser
avaliado examinando o quadro CTS.
• Como se comportam as demais estações ?
– A escuta o RTS de B mas não o CTS de C, de modo que pode
enviar seus quadros a qualquer estação em seu raio de
alcance, menos para B (idealmente escolhe outro canal);
– D escuta o CTS de C mas não o RTS de B, o que indica que
está próxima a uma estação que vai receber um quadro de
dados logo a seguir e portanto deve se manter em silêncio até
que este seja recebido.
MAC Wireless
• Apesar destas precauções, colisões ainda podem
ocorrer:
– A e C podem enviar quadros RTS para B ao
mesmo tempo.
– Estes irão colidir e ser perdidos.
• No caso de colisão, o emissor do RTS espera um certo
tempo pelo CTS e, se não receber nada, tenta
novamente mais tarde.
• O tempo de espera é definido pelo algoritmo BEB
(Binary Exponential Backoff) usado na Ethernet.
Frame IEEE 802.11
• Duração/ID: tempo restante para receber a próxima
transmissão. Para CTS/RTS esse campo contém o
período de tempo que o meio vai ficar ocupado.
• Controle de Seqüência: usado para controle de
fragmentos.
• Corpo: dados a transmitir.
• FCS: controle de erros por CRC 32 bits.
O campo Frame Control
•
•
•
•
•
•
•
•
•
Versão do protocolo: Indica a versão corrente do protocolo 802.11 utilizado.
Tipo e subtipo: determina a função do quadro (controle, dados e gerenciamento)
Para o sistema de distribuição e Do sistema de distribuição: Indicam se o quadro
está indo para o DS ou se é oriundo do DS.
Mais fragmentos: indica se mais fragmentos do quadro (dado ou gerenciamento) estão
vindo.
Retransmissão: indica se a informação está ou não sendo retransmitida.
Gerenciamento de Energia: indica se a estação que transmitiu a informação está em
modo ativo ou em modo economia de energia.
Mais dados: indica para uma estação operando em modo economia de energia que o
AP tem mais quadros para enviar.
WEP: indica se está sendo usado no quadro o processo de criptografia e autenticação.
Ordem: indica se todos os quadros de dados recebidos devem ser processados em
ordem.
Frame IEEE 802.11
• Significado dos 4 campos de endereço:
–
–
–
–
SA (Source Address): endereço MAC da fonte da msg
DA (Destination Address): endereço MAC do destinatário final
RA (Recipient Address): endereço MAC do próximo AP ou estação
TA (Transmitter Address): endereço da estação ou AP que enviou o
quadro para a rede
– BSSID: endereço MAC do AP (Infrastructure mode)
Equipamentos mais usados
AP repetidor
sem fio
Ethernet
Servidores
Antenas
É utilizada uma gama variada de antenas garantindo
cobertura ótima de rádio sob as mais diversas
condições:
• Omnidirecionais espalham igualmente o sinal em todas as
direções
• Direcionais concentram o sinal em uma determinada
direção.
Antena Omni Simples 5.5 dBi
Antena de uso geral, oferece ótima cobertura
omnidirecional.
Antena F Plane 3 e 4,5 dBi (também conhecida como
Sandra D)
Antena ominidirecional de pequeno tamanho, para
aplicações em que a antena deve ficar discreta.
Antenas
Antenas Omni de Alto Ganho - 8, 9 e 12 dBi
Antena de uso geral, oferece ampla cobertura omnidirecional
Utilizada em áreas abertas e ambientes agressivos.
Antenas
Antena Patch (7 dBi)
Antena direcional, de facho largo.
Normalmente montada em paredes.
Antena Yagi (13,8 dBi)
Antena fortemente direcional, de
lóbulo estreito.
Antena compacta (1 dBi)
Antena ominidirecional de uso geral, empregada em terminais
veiculares e em montagens em ambiente de escritório, alem de
placas ISA, PCI e PCMCIA.
Cartão ISA ou PCI Plug and Play
Adaptador de rede sem fio
• Plug and Play
• Adaptador de rede sem fio
• Permite a mobilidade das
workstations, sem fio e de forma
ininterrupta.
• Uso em locais cujo layout é alterado
com freqüência ou em redes de PCs
onde o cabeamento não é possível.
• Drivers padrão ODI ou NDIS
PC Card
Adaptador de rede sem fio
• Padrão PCMCIA
• Adaptador de rede sem fio
• Alta performance e baixo consumo
• Para conexão na rede Spectrum24 de
terminais portáteis.
• Opções de antena embutida ou externa
• Drivers padrão ODI ou NDIS
Placa ISA e Cartão PCMCIA MicroAP
• Solução para pequenas redes
sem fio
• Gerencia uma célula com até
16 dispositivos móveis.
• Instalado diretamente em um
PC desktop ou notebook
• Permite a criação de sistemas
compactos e móveis, além de
“workgroups”.
Adaptador Serial e Ethernet
• Para conexão de dispositivos
seriais ou Ethernet à rede Sem
fio.
• Permite conectar dispositivos
como impressoras, balanças,
leitores fixos, câmeras,
microcomputadores e outros de
forma absolutamente
transparente.
Wireless com IR
Wireless com Laser
Interferência em redes wireless
• fornos de microondas dividem a faixa de
espectro de 2.4GHz;
• Essa banda também é dividida com os
telefones sem fio;
• A proliferação dessas redes em
residências e edifícios de escritórios
aumenta os problemas de interferência.
•
Segurança em redes wireless
Autorização de acesso:
– Para impedir acesso não autorizado, um valor de
identificação chamado de ESS-ID, é programado
em cada AP para identificar a sub-rede de
comunicação de dados.
– Se uma estação não puder identificar esse valor,
não poderá se comunicar com o AP respectivo.
– Alternativa: duplicar a tabela de controle de
endereços MAC sobre o AP, permitindo que
apenas estações com o endereço MAC
reconhecido possam acessar a WLAN.
Segurança em redes wireless - WEP
• Dados irão trafegar pelo ar e poderão ser interceptados por
pessoas com equipamentos apropriados => Criptografia
necessária!
• A norma IEEE incluiu um mecanismo de criptografia no MAC.
• Este mecanismo é chamado WEP (Wired Equivalent Privacy) e
é baseado no algoritmo de criptografia RC4.
• A possibilidade de interceptação na comunicação é pequena,
uma vez que a tecnologia FHSS realiza a comunicação entre os
transceptores em freqüências aleatórias (mais de 70 canais de
modulação), possuindo cada transceptor uma identidade própria
para sincronia com todo o sistema.
Variantes de Wireless Networks
• IEEE 802.11 – WLAN (Wireless Local Area
Network)
– Opera na faixa de 2.4GHz ISM (Industrial, Scientific and
Medical) ou IR
– taxas de 1 ou 2 Mbps
– FHSS
– Largura de banda de 83.5MHz
– Aprovada em Julho de 1997
– Também chamado padrão “Legacy”
– Poucos produtos no mercado
•
Variantes de Wireless Networks
IEEE 802.11a (Wi-Fi5, Wireless Fidelity)
– atua na banda de 5GHz UNII (Unlicensed National
Information Infrastructure), menos comum do que ISM e
com problemas de regulamentação em alguns países
– Menos interferência, mas mais desvanecimento de
Rayleight!
– usa OFDM (Orthogonal Frequency Division Multiplexing),
sistema de modulação com múltiplas portadoras
– 12 canais independentes
– largura de banda de 300MHz
– Não compatível com legacy nem 802.11b
– taxas de 6, 9, 12, 18, 24, 36, 48 e 54Mbps
– Aprovada em Setembro de 1999
– Primeiros produtos surgiram em 2001
•
Variantes de Wireless Networks
IEEE 802.11b (Wi-Fi)
– opera na banda de 2.4 GHz ISM
– DSSS
– usa CCK (Complementary Code Keying), sistema de
modulação com uma única portadora;
– taxas de 1, 2, 5.5 e 11 Mbps;
– Usa tecnologia direct sequence spread spectrum (DSSS)
– Aprovada em Setembro de 1999.
– Alcance de 30m a 11 Mbps, 90m a 1Mbps
– Com antenas fixas direcionais de alto ganho, alcance pode
chegar a 8Km.
Variantes de Wireless Networks
• IEEE 802.11g
–
–
–
–
Lançado em junho de 2003
Opera na banda de 2.4GHz ISM
taxas de 1, 2, 5.5, 6, 9, 11, 12, 22, 24, 33, 36 e 54Mbps
Usa CCK (como b) para taxas de 5.5 e 11 Mbps e OFDM
(como a) para demais taxas
– Compatibilidade com o sistema Wi-Fi (802.11b) para taxas ≤
11Mbps
– Ampla aceitação no mercado
Variantes de Wireless Networks
• IEEE 802.11n
– Em fase final de homologação.
– Tem sua largura de banda de até 540 Mbps e opera nas faixas
de 2,4 Ghz e 5 Ghz.
– Promete ser o padrão wireless para distribuição de mídia, pois
oferecerá, através de configurações MIMO, taxas mais altas de
transmissão (até 500 Mbps), maior eficiência na propagação
do sinal e ampla compatibilidade reversa com demais
protocolos.
– O 802.11n atende tanto as necessidades de transmissão sem
fio para o padrão HDTV, como de um ambiente altamente
compartilhado, empresarial ou não.
Padrões IEEE 802.11
• IEEE 802.11 - Padrão original: 1 Mbit/s e 2 Mbit/s, 2.4 GHz RF e IR
(1999)
• IEEE 802.11a - 54 Mbit/s, 5 GHz (1999, produtos lançados em 2001)
• IEEE 802.11b - Melhoramentos para 802.11 atingir taxas de 5.5 e 11 Mbit/s
(1999)
• IEEE 802.11c - Procedimentos de operação em pontes; incluído no padrão
IEEE 802.1D (2001)
• IEEE 802.11d - Extensões de Roaming Internacional (2001)
• IEEE 802.11e - Melhoramentos: QoS, incluindo packet bursting (2005)
• IEEE 802.11F - Protocolo Inter-Access Point (2003) Retirado Fev 2006
• IEEE 802.11g - 54 Mbit/s, 2.4 GHz (compatível com b) (2003)
• IEEE 802.11h - 802.11a com gerenciamento de espectro (5 GHz)
regulamentação Européia (2004)
• IEEE 802.11i - Segurança melhorada (2004)
• IEEE 802.11j - Extensões para o Japão (2004)
• IEEE 802.11k - Melhoramentos de medição de recursos de rádio
Padrões IEEE 802.11
•
•
•
•
•
•
•
•
•
•
•
•
•
•
IEEE 802.11l - (reservado)
IEEE 802.11m - Manutenção do padrão.
IEEE 802.11n – Melhorias de taxas de transmissão de dados
IEEE 802.11o - (reservado)
IEEE 802.11p - WAVE - Wireless Access for the Vehicular Environment
(para automóveis e ambulâncias)
IEEE 802.11q - (reservado, não será usado pela fácil confusão com 802.1Q
VLAN trunking)
IEEE 802.11r - Roaming rápido
IEEE 802.11s - ESS Mesh Networking
IEEE 802.11T - Wireless Performance Prediction (WPP) – métodos e
métricas de teste
IEEE 802.11u - Intertrabalho com redes não 802 (por exemplo, celular)
IEEE 802.11v – Gerenciamento de rede sem fio
IEEE 802.11w – Gerenciamento protegido de frames
IEEE 802.11x - (reservado)
IEEE 802.11y - 3650-3700 Operação nos EUA
Outros padrões Wireless
• IEEE 802.15 – WPAN (Wireless Personal Area
Network)
– Opera na banda de 2.4GHz ISM, padrão baseado na especificação
Bluetooth;
– Para taxas ≥ 20Mbps, permitindo baixa potência, e soluções de
baixo custo visando aplicações de multimídia e imagens digitais
em estações portáteis.
– Aprovada em Março de 2002.
– A especificação Bluetooth é uma solução de baixo-custo que pode
fornecer links entre celulares, computadores e outros dispositivos
portáteis, e conectividade à internet. Ela é um complemento as
WLAN.
Conclusões
• Redes sem fio cada vez mais usadas em automação
• Muito úteis em dispositivos móveis (AGVs, Robôs,
etc.) ou estações fixas em locais de difícil colocação de
cabos
• Ainda existem problemas de:
– alcance
– segurança
– interferência
Projeto MAP
-
Manufacturing Automation Protocol: iniciativa da GM (1980),
com a finalidade de definir rede voltada para automação da
manufatura (baseada no RM-OSI).
-
MAP bem adaptada para comunicação entre equipamentos de
chão de fábrica, tais como: Robôs, CNC, CLP, terminais de
coleta de dados, Computadores, etc.
-
Para aplicações com tempos críticos foi definida a versão
MAP/EPA (Enhanced Performance Architecture), que apresenta
duas pilhas de camadas: arquitetura MAP completa (7 camadas)
e uma arquitetura simplificada (camadas 1, 2 e 7).
-
Versão mais simplificada: MINI-MAP implementa somente as
camadas 1, 2 e 7 do RM-OSI.
Projeto TOP
-
Technical Office Protocol: desenvolvido pela BOEING a partir de
1983.
-
Redes para automação de áreas técnicas e administrativas.
-
Baseado no modelo OSI de 7 camadas.
-
Serviços:
- correio eletrônico;
- processamento de textos;
- acesso a base de dados distribuída;
- transferência de arquivos;
- CAD/CAM distribuído;
- troca de documentos;
- transações bancárias.
-
A partir de 1986: MAP e TOP reunidos (projeto MAP/TOP).
Projeto FIELDBUS
-
Fieldbus (Barramento de Campo): solução de comunicação para
os níveis hierárquicos mais baixos dentro da hierarquia fabril.
-
Interconecta dispositivos primários de automação (Sensores,
atuadores, chaves, etc.) e os dispositivos de controle de nível
imediatamente superior (CLP, CNC, RC, PC, etc.).
-
Ainda existe ampla discussão em torno do padrão mundial para
o Fieldbus.
-
Principais grupos envolvidos nos trabalhos de padronização:
-
Avaliadores: IEC, ISA, EUREKA, NEMA
-
Proponentes: PROFIBUS, FIP, ISA-SP50 (FF).
Manufacturing Automation Protocol
Introdução
•
Projeto MAP nasceu no início dos anos 80 por iniciativa da
General Motors.
•
Na época, apenas 15% dos equipamentos programáveis de
suas fábricas eram capazes de se comunicar entre si.
•
Custos de comunicação muito elevados, avaliados em 50%
do custo total da automação.
•
Quantidade de equipamentos programáveis deveria sofrer
uma expansão de 400 a 500% num prazo de 5 anos.
MAP: introdução
•
Opções da GM:
-
continuar utilizando máquinas programáveis de vários
fabricantes e solucionar o problema da maneira como vinha
sendo feito;
-
basear produção em equipamentos de um único fabricante;
-
desenvolver uma proposta padronizada de rede que
permitisse interconectar todos os equipamentos.
•
Solução adotada: terceira opção.
•
Em 1981, a GM uniu-se a outras empresas (DEC, HP e IBM)
definindo solução baseada no RM-OSI.
A arquitetura MAP
•
Camadas 1 e 2: selecionadas normas IEEE 802.4 (barramento
com ficha) e IEEE 802.2 (LLC).
•
Camada Física: escolhido o suporte de comunicação em
broadband, com cabo coaxial.
•
Escolha de broadband baseada nas razões seguintes:
-
possibilidade de uso de vários canais de comunicação sobre
um mesmo suporte;
-
permitir a troca de sinais como voz e imagem para aplicações
como supervisão, circuito fechado de TV, teleconferência,
etc.;
-
a GM já possuía muitas instalações operando em broadband.
A arquitetura MAP
•
Camada de Enlace (MAC): escolhido Token-Bus, pois:
-
era o único protocolo suportado em broadband;
-
muitos equipamentos programáveis já usavam
broadband e IEEE 802.4;
-
possibilidade de atribuir prioridades às mensagens.
•
Camada de Enlace (LLC): optou-se por LLC tipo 1 (sem
conexão e sem reconhecimento).
•
Camada de Rede: sem conexão, cada mensagem sendo
roteada individualmente através da rede.
•
Protocolo de roteamento definido pelo projeto MAP e
normalizado na ISO sob o número 9542.
A arquitetura MAP
• Camada de Transporte: protocolo classe 4 da ISO
(TP4, ISO 8072/73), orientado à conexão, com
controle de erros.
• Oferece um canal de comunicação confiável, sem
perdas, erros, nem duplicação de mensagens.
• TP4 assegura ainda as funções de fragmentação e
blocagem de mensagens.
• Camada de Sessão: norma ISO 8326/27, modo fullduplex e resincronização.
• Camada de Apresentação: representação de dados
baseada na ASN.1.
•
A arquitetura MAP
Camada de Aplicação:
- MMS: troca de mensagens entre equipa-mentos
de produção;
- FTAM: acesso e a transferência de arquivos;
- ROS: gestão de nomes (diretório);
- Funções de gerenciamento de rede: gestão dos
recursos, medição de desempenho, modificação
dos parâmetros da rede.
Problemas com MAP
• MAP original tinha alguns problemas:
– Caro: placas broadband requerem Modem
– Lento: protótipos da década de 80 tinham tempos de
resposta da ordem de 500 ms
– Requer muita memória: necessário armazenar
software das camadas 3 até 7 em algum lugar
» Não critico em um PC: HD
» Problema para dispositivo como CLP, CNC,
RC, etc.: EPROM
A arquitetura MAP-EPA
•
Proposta MAP original adequada aos níveis hierárquicos
superiores. A arquitetura a 7 camadas oferece um overhead
indesejável nos níveis mais baixos da hierarquia.
•
Solução: Definição de uma versão simplificada denominada
MAP-EPA (Enhanced Performance Architecture).
•
Definição de duas pilhas de protocolos: pilha normal Full-MAP e
pilha MAP-EPA, desprovida das camadas de Rede, Transporte,
Sessão e Apresentação.
•
Protocolo IEEE 802.4 (Token-Bus) ainda adotado, porém sobre
um suporte de transmissão em baseband a 5 Mbit/s.
•
Um processo de aplicação tem a opção de enviar seus dados
através da pilha normal ou, em casos onde o requisito seja um
tempo de resposta rápida, pela pilha MAP-EPA.
A arquitetura MAP-EPA
MAP
Aplicações
convencionais
EPA
Aplicação
Apresentação
Sessão
Transporte
Rede
Enlace LLC 802.2 Tipos 1 e 3
MAC 802.4 Token Bus
Física Banda Base 5 Mbps
Aplicações
tempo-real
A arquitetura Mini-MAP
•
Composta das camadas 1, 2 e 7 (só tem a pilha simplificada).
•
Protocolo de Enlace: LLC tipos 1 e 3.
Aplicação
Conexão com LSAPs
LLC Tipos 1 e 3
MAC 802.4
Banda Base
(5 Mbps)
A arquitetura MAP/TOP
Espec.
Camadas
Aplicação
TOP
MAP
ACSE, FTAM
VTP
MAP-EPA MiniMAP
MMS, FTAM, ROS
Apresentação
ISO 8822 - ASN.1
Sessão
ISO 8326 e 8327
Transporte
ISO 8072 e 8073 Classe 4
Rede
ISO 8348 s/ conexão
Enlace
Física
LLC 802.2 Tipo1
MAC 802.3 CSMA/CD
Banda Base
(10 Mbps)
LLC 802.2 Tipo 1
MAC 802.4 Token Bus
Banda Larga
(10 Mbps)
VAZIO
LLC 802.2 Tipos 1 e 3
MAC 802.4
Banda Base (5 Mbps)
Os Serviços de Mensagem da Manufatura (MMS)
• MMS: conjunto de serviços de comunicação
orientados para aplicações industriais.
• MMS organizado em duas partes:
- Manufacturing Message Services: Serviços;
- Manufacturing Message Specification: Protocolo.
MMS e Companion Standards
• Companion Standards oferecem funções de mais alto
nível, construídas a partir das funções básicas do
MMS.
• Existe Companion Standards específicos para:
- robôs (RC);
- máquinas de comando numérico (CNC);
- sistemas de visão;
- controladores lógicos programáveis (CLP);
- sistemas de controle de processos.
Os objetos MMS
• Serviços MMS manipulam objetos virtuais.
• Usuários dos serviços MMS: Processos de Aplicação
(AP - Application Process).
• Comunicação entre dois AP realizada segundo um
modelo Cliente-Servidor.
• Objeto básico: Dispositivo Virtual de Manufatura
(VMD, Virtual Manufacturing Device) representa um
equipamento real de produção.
• Todo processo de aplicação modelizado no MMS
possui, no mínimo, um objeto VMD.
Os objetos MMS
•
Objetos Domínios (Domains): permitem reagrupar os programas
e os dados necessários à execução no equipamento considerado.
•
Objetos Invocação de Programa (Program Invocation):
permitem execução remota de programas.
•
Objeto Estação Operador: permite a um operador humano se
comunicar com um equipamento de produção.
•
Objetos Semáforos: permitem gerenciar a sincronização de
processos e o acesso concorrente a recursos.
•
Objetos Condição de Evento, Ação de Evento e Inscrição de
Evento: detecção e o tratamento de eventos.
•
Objetos Variáveis: leitura e escrita de variáveis remotas.
•
Objetos Jornais: produção de relatórios de produção.
Os objetos MMS
VMD
Objetos
MMS
...
...
Função Executiva
Estação
Operador 1
Estação
Operador N
Serviços MMS
•
84 Serviços distribuídos em 9 Classes:
– Gestão de Contexto
» iniciação, liberação, abandono e rejeição de conexão com
outro usuário MMS
– Gestão de Domínio
» transferência de informações (códigos e dados) para serem
carregados num domínio de forma dinâmica: as seqüências
DownLoad e UpLoad são atividades que permitem gerenciar
as transferências entre Cliente e Servidor
– Gestão de Programas
» permitem que um usuário Cliente MMS gerencie a execução
remota de programas num usuário Servidor
– Acesso a Variáveis
» definição e acesso às variáveis de um VMD
Serviços MMS
– Gestão de Semáforos
» sincronização e controle do acesso aos recursos de um
VMD
– Estação Operador
» entrada e saída de informações via estações de operador
– Gestão de Eventos
» definição e tratamento de eventos via serviços MMS
– Gestão de VMD
» oferece serviços de VMD (informações sobre os objetos)
– Gestão de Jornal
» salvamento de informações de estado de um VMD,
particularmente no que diz respeito à ocorrência de
eventos e à afetação de variáveis.
C la s s e
G estão d e
C o n te x to
G estão d e
VM D
G estão d e
D o m í n io
G estão d e
P ro g ra m a s
A ce sso a
V a r iá v e i s
P r im itiv a s d e S e r v iç o
I n it i a t e
C o n c lu d e
A bo rt*
C ancel
R e je c t *
S tatu s
U n s o l i c it e d S t a t u s *
G e t N a m e L is t
I d e n t ify
R enam e
I n it i a t e D o w n L o a d S e q u e n c e
D o w nL o adS eg m ent
T e r m in a t e D o w n L o a d S e q u e n c e
I n it i a t e U p L o a d S e q u e n c e
U pL o adS eg m ent
T e r m in a t e U p L o a d S e q u e n c e
R e q u e s t D o m a in D o w n L o a d
R e q u e s t D o m a in U p L o a d
L o a d D o m a in C o n t e n t
S to r e D o m a in C o n t e n t
D e le t e D o m a i n
G e t D o m a in A t t r ib u t e
D o m a in F i le
C r e a t e P r o g r a m I n v o c a t io n
D e le t e P r o g r a m I n v o c a t io n
S ta rt
S to p
R esu m e
R eset
K ill
G e t P r o g r a m I n v o c a t io n A t t r i b u t e s
R ead
W r it e
I n f o r m a t io n R e p o r t
G e t V a r ia b l e A c c e s s A t t r i b u t e s
D e le t e N a m e d V a r i a b l e
D e fin e S c a t t e r e d A c c e s s A tt r ib u t e s
D e le t e V a r ia b l e A c c e s s
D e f i n e N a m e d V a r ia b l e L i s t
G e t N a m e d V a r ia b le L is t A tt r ib u t e s
D e le t e N a m e d V a r i a b l e L i s t
D e fin e N a m e d T y p e
G e t N a m e d T y p e A t t r ib u t e s
D e le t e N a m e d T y p e
C o m e n tá r io s
in ic ia ç ã o , lib e r a ç ã o ,
a b a n d o n o e r e je i ç ã o d e
c o n e x ã o c o m o u t r o u s u á r io
M M S
o fe r e c e s e r v iç o s d e V M D ,
p a r t ic u l a r m e n t e i n f o r m a ç õ e s
s o b r e o s o b je t o s
p e r m it e m t r a n s f e r ir
i n f o r m a ç õ e s , t a is c o m o
c ó d ig o s e d a d o s d e p r o g r a m a ,
p ara sere m carreg ad o s nu m
d o m í n io d e f o r m a d i n â m i c a :
a s s e q ü ê n c ia s D o w n L o a d e
U p L o a d s ã o a t iv i d a d e s q u e
p e r m it e m g e r e n c i a r a s
t r a n s fe r ê n c ia s e n t r e C lie n t e e
S e r v id o r
p e r m it e m q u e u m u s u á r io
C lie n t e M M S g e r e n c ie a
exe cu ção rem o ta d e
p r o g r a m a s n u m u s u á r io
S e r v id o r
p e r m it e m a d e f i n i ç ã o e o
a c e s s o à s v a r iá v e is d e u m
V M D e e s t a b e l e c e r a r e la ç ã o
e n t r e a s v a r iá v e i s d e u m
V M D ( o b je t o s ) e a s v a r iá v e i s
r e a l d e u m e q u ip a m e n t o d e
p ro d u ção
C la s se
G estã o d e
S e m á fo ro s
E staç ão
O p e ra d o r
G estã o d e
E ve nto s
G estã o d e
Jo rna l
P rim itiv a s d e S erv iço
T a k e C o ntro l
R e lin q u is h C o ntro l
D e fin e S e m ap ho re
D e le te S e m ap ho re
R e p o rtS e m ap ho re S tatu s
R e p o rtP o o lS e m ap ho re S tatu s
R e p o rtS e m ap ho re E ntryS ta tu s
Inp u t
O u tp ut
D e fin e E ve ntC o nd it io n
D e le te E ve ntC o nd it io n
G e tE ve ntC o nd it io n A ttribu te
R e p o rtE ventC o nd it io nS tatu s
A lte rE ve ntC o nd it io n M o n ito ring
T rig g e rE v e nt
D e fin e E ve ntA c t io n
D e le te E ve ntA ct io n
G e tE ve ntA ct io n A ttribu tes
R e p o rtE ventA c t io nS ta tu s
D e fin e E ve ntE nro llm e nt
D e le te E ve ntE nro llm e nt
G e tE ve ntE nro llm e nt
R e p o rtE ventE nro llm e nt
A lte rE ve ntE nro llm e nt
E ve ntN o tifica t io n*
A c k no w led g e E ve ntN o tific at io n
G e tA la r m S u m m a r y
G e tA la r m E nro llm e ntS u m m a r y
A tta chT o E ve ntM o d ifier
R e ad Jo u rna l
W r iteJo u rna l
In it ia liz e Jo u rna l
R e p o rtJo urna lS tatu s
C o m en tá rio s
são e nc arreg ad o s d a
s in cro n iza çã o e do co ntro le
d o ac esso ao s re cu rso s d e u m
V M D p e lo s p ro c esso s d e
a p lica çã o
c o ntro la m a e ntrad a e sa íd a
d e in fo r m aç õ e s v ia e sta çõ es
d e o p erado r
p er m ite m a d e fin iç ão e o
tratam e nto d e evento s v ia
serv iç o s M M S . A
p o ss ib ilid ad e d e asso c iar a
e xe cu çã o d e u m se r v iç o
M M S à o c o rrê nc ia d e u m
e ve nto é u m a sp ec to
inte re s sa nte , im p le m e nta d o
p e lo M o d ific a d o r
A ttac hT o E ve nt
p er m ite m o sa lva m e nto d e
in fo r m a çõ es so bre a exe c u ç ão
d e u m V M D , p a rticu lar m e nte
no q u e d iz resp e ito à
o co rrênc ia d e eve nto s e à
a fe taç ão d e va riá ve is.
Redes Fieldbus
TENDÊNCIA
Decentralizado / Digital
Keyboard
Keyboard
Placa de
aquisição de
dados
D
D
RS 232C
A
A
4..20 mA
0..10 v
MUX
P
Sample/
Holder
A
0..10 v
4..20 mA
P
D
P
C
Decentralizado / Digital /
Multipontos
RS 449 (422/423)
Centralizado /
Analógico
D
Keyboard
FIELDBUS
P
A
A
P
D
C
P
D
A
Amp.
Potência
Adaptador
/Amp.
X
Y
X
Y
sensores
X
atuador
Y
X
Y
sensores
inteligentes
atuador
inteligente
X
Y
X
Y
sensores
inteligentes
atuador
inteligente
Vantagens de uso do Fieldbus
-
redução da cablagem pela utilização de um meio físico
compartilhado;
-
redução do número de canais de comunicação com o
processo;
-
redução do tempo e complexidade do projeto de lay-out;
-
facilidade de instalação e manutenção, pela manipulação de
um menor número de cabos e conexões;
-
facilidade de detecção, localização e identificação de falhas,
através de funções de monitoração automática;
-
maior modularidade no projeto e instalação, aumentando a
flexibilidade de expansão de funções e módulos;
-
melhor consistência e confiabilidade da informação, através
da digitalização e pré-processamento;
Vantagens de uso do Fieldbus
-
possibilidade de sincronização
amostragem de Entrada/Saída;
dos
instantes
de
-
melhoria do desempenho global da aplicação pela
descentralização do processamento;
-
maior facilidade de interconexão entre níveis hierárquicos
diferentes de automação;
-
redução dos custos de sistemas através da aquisição
seletiva de dispositivos compatíveis de diferentes
fornecedores, eliminando a dependência de somente um
fornecedor;
-
desacoplamento do software de supervisão da dependência
de um fornecedor específico de Hardware.
Motivações e requisitos do Fieldbus
• Redes MAP tinham tempo de resposta de cerca de
500 ms.
• MAP-EPA e Mini-MAP permitem a realização de
tempos de resposta de cerca de 100 ms.
• Fieldbus reduz este tempo para abaixo de 10 ms.
• Fieldbus define somente as camadas 1, 2 e 7 do
modelo de referência OSI (como Mini-MAP).
• Funções das camadas 3 a 6 indispensáveis para a
comunicação absorvidas pelas camadas 2 ou 7.
Motivações e requisitos do Fieldbus
- Aspecto de custo assume grande importância.
- dispositivos a serem interligados tem em geral custo inferior ao da
própria interface MAP.
- São requeridos nós a um custo da ordem de U$ 50 ou inferior.
Componente MAP
Cabo Coaxial
Controlador
Demodulador
Componente
Ethernet / IBM
Nó CSMA/CD
Nó Token-Ring
Preço médio
U$ 2,5 / m
U$ 5.000
U$ 1.500
Preço médio
Elemento Campo
CLP
Controle Robô
PC
Sensor/Atuador
Preço médio
U$ 3.000
$20.000
U$ 2.000
U$ 50 a 1000
U$ 500 - 1500
U$ 750 - 1500
I/O Binária
U$ 50 a 1000
Motivações e requisitos do Fieldbus
• Três classes distintas de aplicação:
- sistemas "Stand-Alone": transações ocorrem
somente entre dispositivos ligados em um mesmo
segmento de rede (ex.: sensores e atuadores ligados
a um CNC dentro de uma máquina).
- sistemas em cascata: dispositivos conectados a
segmentos distintos podem trocar informações por
meio de uma "bridge" (ex.: SDCD - Sistema
Distribuído de Controle Digital).
- sistemas hierárquicos: Fieldbus está interligado via
"gateway" a um nível hierárquico superior da
automação fabril (ex.: estrutura CIM).
•
Motivações e requisitos do Fieldbus
Em função do tipo de aplicações que se propõe a atender, um
conjunto de requisitos básicos são impostos ao Fieldbus:
-
elevado desempenho para atender as aplicações com
requisitos de tempo críticos;
-
método de transmissão simples e barato;
-
meio de transmissão de preço acessível;
-
necessidade de consistência de dados;
-
serviços compatíveis com redes dos níveis hierárquicos
superiores (compatibilidade com MMS);
Esforços para padronização do Fieldbus
•
Existem várias soluções proprietárias para o Fieldbus.
•
Foram feitos esforços para padronização no final de década de 80.
ESPRIT CNMA/Fieldbus
Sistema Fieldbus para Processos de Fabricação
PROFIBUS
D
Norma nacional em abril 91
Siemens
Foxboro
Rosemount
ISA/ IEC
USA
ISA SP50
Iniciou definição de Pré-Norma
Fieldbus Foundation
MIL 1553
industrial
outros
FIP
F
Norma nacional inicio 1988
EUREKA "Fieldbus"
Desenvolvimento e teste de um Fieldbus
para Processos Unitários ( Ex. )
Motivações e requisitos do Fieldbus
•
sistemas fieldbus atuais adequados para o acoplamento direto de
sensores e atuadores em processos com dinâmica elevada
(RTLAN) ?
Processador Central
Cont.
Atuador
Processo
Sensor
Fieldbus
Processador Central
Cont.
Atuador
Processo
Sensor
A proposta FIP
(Factory Instrumentation Protocol)
Introdução:
• FIP elaborado por um conjunto de empresas européias
(principalmente francesas), órgãos do governo francês e
centros de pesquisa.
• Criadores conglomerados em torno do chamado “Club
FIP” (http://www.worldfip.org).
• Procurou levar em consideração as restrições de tempo
real impostas por aplicações de chão de fábrica.
A camada Física do FIP
•
Meios de transmissão: fibra ótica ou par trançado.
•
Par trançado: previstas três velocidades de transmissão:
-
S1: 31.25 Kbps (segurança intrínseca)
-
S2: 1 Mbps (padrão)
-
S3: 2.5 Mbps (processos de elevada dinâmica)
•
Fibra ótica: velocidade de 5 Mbps.
•
Bits codificados segundo o código Manchester, que permite o
envio simultâneo do sinal de sincronização e dos dados.
•
Suporta segmentos com comprimento de até 2000 m e até 256
estações.
A camada de Enlace do FIP
•
Método de acesso ao meio baseado na difusão ("Broadcasting").
•
A difusão é organizada por uma entidade centralizada denominada
"árbitro de barramento".
•
Dados representados por objetos (variáveis).
•
Cada objeto é representado por um "nome" único no sistema.
•
Cada objeto é elaborado por um único transmissor (produtor) e lido
por qualquer número de receptores (consumidores).
•
A comunicação transcorre da seguinte forma:
-
árbitro difunde na rede o nome da variável (objeto) a ser
transmitida;
-
O produtor da variável difunde a informação ligada ao
identificador;
-
todos os consumidores interessados lêem a variável difundida.
A camada de Enlace do FIP
Árbitro
ID_DAT
C
P
C
RP_DAT
Árbitro
C
P
C
•
A varredura das variáveis periódicas é feita a partir de uma lista
implementada no árbitro na inicialização.
•
A transmissão de mensagens não periódicas é feita conforme a
norma IEEE 802.2, LLC tipos 1 e 3.
Formato do quadro do FIP
•
PRE: preâmbulo, utilizado para sincronização.
•
FSD/FED: delimitadores de início e fim de quadro.
•
EB: Bits de equalização, operam como bits de interface entre os
delimitadores e os dados codificados em Manchester.
•
DFS (Data Frame Sequence):
-
Controle: tipo de quadro (quadro de identificação de informação ou de
envio de informação).
-
Dados: contém endereço lógico ou valor de uma variável, mensagem,
reconhecimento ou lista de identificadores.
-
FCS: controle de erros com técnica polinomial (polinômio gerador
proposto pela CCITT).
PRE
FSD
EB
FSS
FSS — Frame Start Sequence
FES — Frame End Sequence
DFS
EB
FED
FES
EB
Serviços oferecidos pela camada de enlace FIP
Classe
Primitiva
Comentários
L_PUT.req/cnf
L_SENT.ind
L_GET.req/cnf
L_RECEIVED.ind
atualiza dados
sinaliza envio
busca de dados
sinaliza recepção
Atualização não
periódica de dados
L_PARAM.req/cnf
requisita dados
Transmissão de
mensagem com ACK
L_MESSAGE_ACK.req/ind/cnf
c/ reconhecimento
Transmissão de
mensagem sem ACK
L_MESSAGE.req/ind
s/ reconhecimento
Atualização cíclica de
dados
A Camada de Aplicação do FIP
-
FIP adota sub-conjunto do MMS para aplicações não
críticas no tempo.
-
Para aplicações críticas no tempo, adota família de serviços
MPS ("Message Periodic/Aperiodic Services").
Classe
Leitura de variáveis
Escrita de variáveis
Leitura do tipo de
variável
Acesso à listas de
variáveis
Serviços de
sincronização
Primitiva de serviço
A_READ.req/cnf
A_READFAR.ind
A_WRITE.req/cnf
A_WRITEFAR.ind
A_GETOBJECT_DESCRIPTION.req/cnf
Comentários
lê nomes de variáveis,
estruturas, status, valores
escreve especificação, valor,
status
lê especificação
A_READLIST.req/cnf
A_WRITELIST.req/cnf
A_SEND.ind
A_RECEIVE.ind
lê e escreve atributos,
valores
sincronização local e remota
•
Funções de Gerenciamento da Rede no FIP
O projeto FIP definiu uma série de funções de
gerenciamento de rede:
– Definição e atualização das listas de objetos;
– Definição e
varredura;
atualização
das
tabelas
de
– Gerenciamento das operações de partida e
parada;
– Detecção e correção de falhas;
A proposta PROFIBUS
(PROcess FIeld BUS)
Introdução
•
PROFIBUS desenvolvido na Alemanha, inicialmente pela
Siemens, Bosch e Klockner-Moeller em 1987.
•
Em 1988 tornou-se um "Trial Use Standard" no contexto da
norma DIN (DIN V 19245, parte 1), que define as camadas Física
e Enlace.
•
Posteriormente, grupo de 13 empresas e 5 centros de pesquisa
propuseram alterações nas camadas Física e Enlace e definiram
a camada de Aplicação (norma DIN V 19245, parte 2).
•
Esta proposta é atualmente apoiada por mais de 5.000 empresas
européias e internacionais (www.profibus.com).
A camada física do PROFIBUS
•
A camada física do PROFIBUS baseia-se no padrão EIA
RS-485 (Electronic Industries Association).
•
Topologia barramento, utilizando como meio um par
trançado blindado (STP).
•
Permite a interligação de até 32 elementos (estações ativas,
passivas ou repetidoras) por segmento. São permitidos até 4
segmentos, totalizando um máximo de 128 estações.
•
Codificação NRZ, podendo ser implementada com uma
USART simples (assíncrona).
•
Taxas de transmissão: 9.6, 19.2, 93.75, 187.5 e 500 Kbps,
mais tarde incluídas 1.5 Mbps, 12 Mbps.
A camada de enlace do PROFIBUS
•
O PROFIBUS combina dois métodos deterministas de
acesso ao meio: "Master/Slave" e "Token-Passing".
anel lógico
Mestre 1
Mestre 2
ativas
token
passivas
Escravo
1
Escravo
2
Escravo
3
Escravo
N
A camada de enlace do PROFIBUS
•
•
O PROFIBUS agrupa quadros em duas classes:
-
quadros longos: para transmissão entre estações mais
complexas (ativas, mestres);
-
quadros curtos: para dispositivos de campo simples
(passivas, escravos).
Os quadros previstos incluem:
-
quadro longo sem campo de dados;
-
quadro longo com campo de dados fixo;
-
quadro longo com campo de dados variável;
-
quadro curto sem campo de dados;
-
quadro curto com campo de dados;
-
quadro curto de passagem de token.
Serviços de enlace do PROFIBUS
•
Protocolo de enlace: FDL ("Fieldbus Data Link").
Classe
SDN (Send Data with No
Acknowledge)
SDA (Send Data with
Acknowledge)
RDR (Request Data with
Reply)
CRDR (Cyclic Request Data
with Reply)
CSRD (Cyclic Send and
Request Data)
SRD (Send and Request
Data)
Primitiva de serviço
FDL_DATA
FDL_DATA_ACK
FDL_REPLY
FDL_REPLY_UPDATE
FDL_CYC_REPLY
FDL_CYC_DEACT
FDL_REPLY
FDL_REPLY_UPDATE
FDL_SEND_UPDATE
FDL_CYC_DATA_REPLY
FDL_CYC_DEACT
FDL_DATA_REPLY
FDL_DATA_UPDATE
FDL_DATA_REPLY
FDL_REPLY_UPDATE
Comentários
envio de dados sem
reconhecimento
envio de dados com
reconhecimento
requisição de dados com
reconhecimento
estação local requisita
ciclicamente dados ao usuário
remoto.
estação local envia ciclicamente
e requisita simultaneamente
dados de resposta.
estação local envia e requisita
dados.
A camada de Aplicação do PROFIBUS
• Definido um subconjunto do MMS.
• Camada de Aplicação dividida em três subcamadas:
- Fieldbus Message Specification (FMS): protocolo
propriamente dito;
- Lower Layer Interface (LLI): interface com a
camada de Enlace;
- Application Layer Interface (ALI): interface com
as aplicações do usuário.
C la s s e
S e r v iç o s d e
A ce sso a
v a r iá v e is
S e r v iç o s d e
N o t ific a ç ã o d e
E ve nto s
P r im it iv a s d e s e r v iç o
READ
W R IT E
IN F O R M A T IO N _ R E P O R T
P H Y _ W R IT E
PH Y _READ
D E F IN E _ V A R IA B L E _ L IS T
D E L E T E _ V A R IA B L E _ L IS T
IN IT IA T E _ D O W N L O A D _ S E Q U E N C E
D O W N LO AD _SEG M EN T
T E R M IN A T E _ D O W N L O A D _ S E Q U E N C E
IN IT IA T E _ U P L O A D _ S E Q U E N C E
U PLO AD _SEG M EN T
T E R M IN A T E _ U P L O A D _ S E Q U E N C E
R E Q U E S T _ D O M A IN _ D O W N L O A D
R E Q U E S T _ D O M A IN _ U P L O A D
CREATE_PRO G R A M
IN V O C A T IO N _ D E L E T E _ P R O G R A M
IN V O C A T IO N _ S T A R T
IN V O C A T IO N _ S T O P
IN V O C A T IO N _ R E S U M E
IN V O C A T IO N _ R E S E T
A L T E R _ E V E N T _ C O N D ._ M O N I T O R I N G
E V E N T _ N O T IF IC A T IO N
A C K _ E V E N T _ N O T IF IC A T IO N
S e r v iç o s d e
L e it u r a d e
S tatu s
STATUS
U N S O L IC IT E D _ S T A T U S
S T A T U S _ ID E N T IF Y
S e r v iç o s d e
G e r e n c ia m e n t o
d e D ic io n á r io
d e O b je t o s
S e r v iç o s d e
G e r e n c ia m e n t o
d e C o n t e x to
G ET_O V
PU T_O V
IN IT IA T E _ P U T _ O V
T E R M IN A T E _ P U T _ O V
IN IT IA T E
R E JE C T
ABORT
S e r v iç o s d e
A ce sso a
D o m ín io s
S e r v iç o s d e
In vo cação d e
P ro g r a m a s
C o m e n t á r io s
le it u r a e e s c r it a d e
v a r iá v e is c o n t id a s
e m d is p o s it iv o s
s e r v id o r e s
t r a n s fe r ê n c ia d e
d a d o s o u p ro g r a m a s
d e d is p o s it iv o c lie n t e
p a r a d is p o s it iv o
s e r v id o r e v ic e - v e r s a
p a r t id a , p a r a d a ,
r e to r n o d a e x e c u ç ã o ,
r e to r n o a o e st a d o
in ic ia l e d e le ç ã o d e
p ro gram as
s e r v id o r n o t if ic a
c lie n t e a o c o r r ê n c ia
d e u m eve nto
( a la r m e )
in fo r m a ç õ e s a c e r c a
d o estado do s
d is p o s it iv o s
s e r v id o r e s
d e s c r iç ã o d e to d o s o s
o b je t o s n a r e d e
(no m es, end ereço s,
t ip o s d e d a d o s , e t c )
e s t a b e le c im e n t o e
enc erra m e nto d e
a s s o c ia ç ã o e n t r e d o is
d is p o s it iv o s e a
r e je iç ã o d e
m e n s a g e n s r e c e b id a s
A Proposta ISA SP-50 / FF
Introdução:
• Proposta iniciada pela ISA (Instrumentation Society
of America), pelo comitê "Standards and Practices
50".
• Depois em elaboração pela ISA e IEC para definir
padrão mundial para Fieldbus.
• Trabalhos de padronização ainda em andamento.
• Fieldbus Foudation criada em 1994 : suporte aos
usuários e fabricantes (interoperabilidade,
conformidade, etc) - http://www.fieldbus.org.
•
A Camada Física do ISA-SP50
Camada física compõe-se de três subcamadas:
- DIS (data Independent Sublayer): interface
com camada de enlace (DTE);
- MDS (Medium Dependent Sublayer): codifica
dados para formato compatível com o meio
físico. Especificação para par trançado:
codificação Manchester bifásica;
- MAU (Medium Attachment Unit): descreve o
transceptor para o meio físico.
A Camada Física do ISA-SP50
Camada de Enlace
DIS
(Data Independent Sublayer)
MDS
(Medium Dependent Sublayer)
MAU
(Medium Attachment Unit)
Meio Físico
A Camada Física do ISA-SP50
-
Tipos de meio:
– Meio H1 (áreas de segurança intrínseca):
» Par trançado
» Taxa de transmissão de 31,25 Kbps
» Até 32 estações se meio não é utilizado para a
alimentação dos dispositivos de campo ou menos
(mínimo de 6) estações com alimentação pelo fio
» Topologias barramento, árvore e estrela;
» Distância até 1900m sem repetidores
» Até 4 repetidores
-
A Camada Física do ISA-SP50
– Meio H2 (aplicações de alta velocidade):
» Par trançado.
» Sem alimentação pela linha.
» Taxa de transmissão de 1 Mbps ou 2,5 Mbps.
» Topologia em barramento e estrela.
» Distância máxima de 750 m para 1 Mbps e 500m para 2,5
Mbps, 30 estações (sem repetidores).
– Propostas alternativas:
» Fibra ótica.
» Sinais de rádio.
A Camada de Enlace do ISA - SP50
Classes de serviços:
-
Serviços de gerenciamento de Buffers e filas: permitem
alocar buffers e filas para a transferência de dados;
-
Serviços de transferência de dados com conexão;
-
Serviços de transferência de dados sem conexão: úteis no
envio de telegramas de difusão (multicast e broadcast);
-
Serviços de escalonamento de transações: permitem
programar o LAS, definindo a seqüência de passagem de
token.
A camada de Enlace do ISA - SP50
Classes de funções para estações:
-
Responder: estação só transmite dados em resposta a
uma solicitação (estação "escrava");
-
Initiator: estação pode se apoderar do direito de acesso
ao meio (token), podendo enviar e requisitar dados a
outras estações por iniciativa própria;
-
Linkmaster: estação pode exercer o papel de
escalonador de enlace, administrando o token e
gerenciando o tempo interno do sistema;
-
Bridge: estação capaz de interligar entidades de enlace
diferentes;
A camada de Enlace do ISA - SP50
•
Se há mais de um "Linkmaster" no sistema, estes disputam entre si
na inicialização o papel de escalonador de enlace.
•
A estação vencedora é chamada LAS (Link Active Scheduler).
•
Existem três tipos de token:
-
Token de escalonamento: disputado na inicialização por
todas as estações Linkmaster, define a estação LAS.
-
Token circulado: distribuído pela estação LAS às demais
estações com funcionalidade de Initiator ou Linkmaster, que
formam um anel lógico.
-
Token delegado: enviado pela estação LAS a uma estação
qualquer por solicitação desta ou para atender às necessidades
de um serviço de comunicação escalonado pela LAS.
A Camada de Enlace do ISA - SP50
LAS
Estação
qualquer
LM
Token de Escalonamento
Token Delegado
Token Circulado
LM
LM
•
A Camada De Enlace Do ISA - SP50
Formas de acesso ao meio:
– Token passing: segue seqüência predefinida na
qual o token sempre é recebido da LAS por um
“Initiator” e devolvido a ela após uso do meio.
– Resposta imediata: um “Initiator” ou o LAS
solicita um dado a um “Responder”, que emite um
frame em resposta (relação mestre-escravo).
– Requisição de token: uma estação envia um
pedido de token embutido em uma mensagem
qualquer. O LAS delega o token a ela quando tem
tempo disponível. Após o uso, token é devolvido a
LAS.
•
A Camada de Enlace do ISA - SP50
Camada de Enlace subdividida em quatro subcamadas:
-
Subcamada de acesso a Enlace: interface com a camada
física, gerencia token e serviços de resposta imediata;
-
Subcamada de escalonamento de Enlace: faz
escalonamento de atividades da entidade de enlace.
Mais complexa em estações Linkmaster (podem assumir
a função de LAS);
-
Subcamada de gerenciamento de conexões: estabelece e
rompe conexões;
-
Subcamada de gerenciamento de Ponte: só existe em
estações tipo Bridge.
A Camada de Enlace do ISA-SP50
Camada de
Aplicação
Subcamada de Gerenciamento de Ponte
Subcamada de Gerenciamento de
Conexões
Subcamada de Escalonamento
Subcamada de Acesso a Enlace
Camada Física
A Camada de Aplicação do ISA-SP50
•
Camada de aplicação ainda em discussão.
•
Procura conjugar MMS, para aplicações sem restrições
temporais, com MPS (serviços tipo READ/WRITE inspirados
no FIP) para atender tráfego cíclico e acíclico com requisitos
de tempo real "duro".
•
Camada de aplicação prevê os seguintes serviços:
-
MCSE (Message Common Service Element): estabelece e
interrompe conexões entre processos de aplicação
(Correspondem aos serviços ACSE da ISO).
-
IMSE (Industrial Message Service Element): serviços
semelhantes aos oferecidos pelo MMS do projeto MAP.
-
DDM (Distributed Database Maintenance): Serviços de
acesso à bases de dados distribuídas.
A Camada do Usuário do ISA-SP50
•
SP-50 define User Layer, situada acima da camada de
aplicação
•
Oferece serviços adequados a diversos tipos de aplicações
(como "companion standards" do MAP).
•
Trabalhos atuais: PCUL - Process Control User Layer.
•
Outros trabalhos deverão atender as áreas de:
-
automação da manufatura;
-
controle predial (imótica);
-
eletrônica embarcada (automóveis),
-
aplicações domésticas (domótica),
-
etc.
A camada de aplicação no FF
• Baseada em Blocos.
• Blocos são representações de diferentes tipos de
funções de aplicação.
• Dividida em funções que formam a estratégia de
controle da aplicação.
• Os blocos utilizados são bloco de recurso, bloco
transdutor e bloco funcional.
– Bloco de Recurso: descreve as características do dispositivo
fieldbus.
– Bloco Transdutor: assume a função de entrada/saída local.
– Bloco Funcional: fornece o comportamento do sistema de
controle.
Serviços de Gerenciamento de Rede do ISA-SP50
• SP-50 inclui funções de gerenciamento de rede:
- Gerenciamento de configuração de rede:
» carregamento;
» inicialização de endereços;
» configuração de comunicação e aplicação;
» partida, etc.;
- Controle
de
operação:
ferramentas
sincronização, escalonamento, etc.;
de
- Monitoração de desempenho: detecção, diagnose
e recuperação de erros, avaliação e otimização de
desempenho, etc.
Fieldbus: Conclusões
-
Uma vez definido um padrão internacionalmente aceito, o
Fieldbus deverá revolucionar o setor de instrumentação.
-
Esta tecnologia permite que a inteligência seja totalmente
distribuída pelo campo e favorece o surgimento de
dispositivos com capacidades locais de processamento cada
vez mais sofisticadas.
-
A integração total dos equipamentos permitirá alterações
nos procedimentos de operação das plantas industriais.
-
O Fieldbus deverá também propiciar a intercambiabilidade
a nível de sensores, atuadores, transmissores e
controladores, trazendo ao usuário uma maior flexibilidade
na compra de produtos e abrindo espaço para novos
fabricantes.
Redes para Instrumentação
GPIB
• Interface de rede padrão para instrumentação: GPIB (General
Purpose Interface Bus).
• Origem: HP-IB (Hewlet-Packard Interface Bus).
• Hoje norma IEEE 488.1 e IEC 625-1.
• Características:
– barramento paralelo,
– 16 linhas com sinal ativo baixo referenciado a um terra
comum.
– tensão acima de 2V considerada como lógico 0 e abaixo de
0.8V como lógico 1.
– 8 linhas de dados
– 3 linhas para operações de handshake
– 5 linhas para gerenciamento da interface
GPIB
Categoria
8 Data lines
3 Handshake lines
5 Interface Management lines
Linha
DIO 1-8
DAV
NRFD
NDAC
REN
IFC
SRQ
EOI
ATN
Nome
Data I/O
Data Valid
Not Ready For Data
Not Data Accepted
Remote Enable
Interface Clear
Service Request
Endo or Identify
Attention
GPIB
• Linhas de controle NRFD e NDAC operam no modo “wiredOR”
• Só assumem o valor lógico TRUE no barramento quando todas
as estações ligadas ao GPIB setam a linha correspondente local
em TRUE (ativo baixo).
• GPIB requer estação controladora (mestre) do barramento, que
define quem será a estação emissora (talker) e quem serão as
estações receptoras (listeners) em cada instante.
• A linha ATN distingue mensagens de dados (ATN=0) de
mensagens dedicadas de gerenciamento da interface (ATN=1)
como, por exemplo, mensagens para definir o talker e os
listeners.
GPIB
• Após a definição, pela estação controladora, de quem serão o talker e os
listeners, são executados os seguintes passos:
– Se o talker tem um novo byte de dados a enviar, coloca seu valor nas
linhas DIO 1-8;
– Talker seta linha DAV (Data Valid) em TRUE;
– Listeners setam NRDF (Not Ready For Data) em FALSE;
– Listeners recebem o dado e setam NDAC (Not Data Accepted) em
FALSE (esta linha só assume o valor FALSE quando todos os
listeners receberem o dado, devido ao uso de wired-OR);
– Talker seta DAV (Data Valid) em FALSE e remove dados das linhas
DIO 1-8;
– Listeners setam NDAC (Not Data Accepted) em TRUE;
– Se listeners estiverem prontos para receber um novo byte de dados,
setam NRFD (Not Ready For Data) em FALSE;
– Talker pode reiniciar processo do passo 1, enviando o byte de dados
seguinte.
GPIB
• GPIB pode ter até 15 estações (entre controladora, talkers e
listeners) no barramento.
• comprimento máximo de cabo de 20 metros.
• taxa de transmissão de até 1Mbps.
• boa aceitação na área de instrumentação.
• GPIB não é uma interface bem adaptada às necessidades de
automação de chão de fábrica (sensores, atuadores, robôs,
CLPs, CNCs, etc.), pois:
– cabos de 16 condutores são caros;
– sinal referenciado ao terra é sensível à perturbações
eletromagnéticas;
– comprimento máximo do barramento é uma limitação
física indesejável.
Redes para Automação de Escritório
Redes para Automação de Escritório
- Existe grande variedade de produtos.
- Tipos mais difundidos:
- ETHERNET (DEC, INTEL e XEROX),
- ARCNET (Datapoint),
- TOKEN-RING (IBM).
- Produtos definem camadas Física e Enlace do
modelo OSI.
Redes para Automação de Escritório
-
Características básicas:
Acesso ao Meio
Velocidade
Número de nós
Meio de
transmissão
Topologia
ETHERNET
CSMA/CD
10 Mbps
1024
Par trançado
Fibra ótica
Cabo coaxial
Star/Bus
ARCNET
Token-passing
2.5 Mbps
254
Par trançado
Fibra ótica
Cabo coaxial
Star/Bus
TOKEN-RING
Token-passing
4 ou 16 Mbps
255
Par trançado
Cabo coaxial
Ring
Redes para Automação de Escritório
- ARCNET (Attached
Network):
Resource
Computer
¾boas características para aplicação industrial
¾Topologia difusão
¾MAC determinista
¾preço baixo.
Redes para Automação de Escritório
-
Ethernet:
¾rede mais popular e de mais baixo custo.
¾MAC não determinista (CSMA/CD).
¾Ampla aplicação onde não há requisitos de Hard
Real Time.
¾Uso do Switcher (tecnologia posterior) torna
aplicável onde há restrições de tempo.
Redes para Automação de Escritório
- Token-Ring:
- é a mais popular entre os produtos da IBM
- alto custo de instalação e baixa flexibilidade.
- elevada taxa de transmissão
- MAC determinista.
Redes Locais Industriais
SINEC
• Redes SINEC (ou SIMATIC NET, SIEMENS) incluem:
– SINEC H1: rede compatível com a norma IEEE 802.3
(Ethernet). Versão H1-MAP tem camada de aplicação
compatível com MAP.
– SINEC H3-MAP: rede FDDI com camada de aplicação
compatível com o padrão MAP.
– SINEC L1: sistema fieldbus proprietário da Siemens.
– SINEC L2 (PROFIBUS): rede fieldbus compatível com a
norma alemã PROFIBUS. Oferecida em 3 versões: DP,
FMS, PA.
SINEC
SINEC
• PROFIBUS DP (SINEC L2-DP = Distributed Peripherie)
− desenvolvido para aplicações que exijam respostas rápidas,
sistemas remotos de I/O (como CLPs ligados a sensores e
atuadores).
− Utiliza o padrão RS485 ou fibra ótica na camada física.
− Para RS485: cabo de 1200 metros com uma taxa de transmissão
de 93.75 Kbps, 1000 metros com taxa de 187.5 Kbps, 200 metros
com taxa de 1.5 Mbps ou 100 metros com taxa de 12 Mbps.
− até 127 estações em 4 segmentos de rede ligados por repetidores.
− operação com mestre único (single master) e escravos, adotando
somente MAC Mestre/Escravos.
− Usa serviços sem conexão e sem reconhecimento (LLC tipo 1).
− serviços de aplicação voltados para leitura e escrita de variáveis
remotas (READ/WRITE).
SINEC
• PROFIBUS FMS (SINEC L2-FMS = Fieldbus Message
Services)
− concebido para a troca de dados entre sistemas inteligentes
autônomos em sistemas de manufatura, como CNCs, CLPs, RCs,
PCs, etc.
− Utiliza RS485 ou fibra ótica na camada física.
− Como as estações podem ser autônomas, utiliza MAC TokenPassing e Mestre/Escravos.
− suporta 127 estações em 4 segmentos de rede
− Usa serviços LLC tipos 1 e 3.
− Os serviços de aplicação seguem o padrão FMS (Fieldbus
Message Services, subconjunto do MMS da rede MAP).
SINEC
• Aplicação típica SINEC L2-FMS:
PC- Visão
PC - Gerente FMC
Rede Profibus
RC
Câmara
CCD
CNC
Torno
Romi-Mazak
tcd
Esteira transportadora
Robô IPSO
SP-50
Micrômetro
Laser
SINEC
• PROFIBUS PA (SINEC L2-PA = Process Automation)
− Permite interligar instrumentos da área de processos unitários
(área química, petroquímica) a um sistema de comunicação.
− Adota o padrão IEC 1158-2 na camada física, que utiliza o
próprio cabo de transmissão de dados para energizar os
dispositivos de campo.
− Taxa de transmissão de 31.25 Kbps (áreas de segurança
intrínseca).
− Comprimento máximo do cabo depende do número de estações
conectadas e é função de seu consumo de energia.
− Um segmento (sem repetidores) suporta no máximo 32 estações.
− MAC utiliza o protocolo Mestre/Escravos.
− Usa LLC tipo 1.
− Serviços de aplicação semelhantes a L2-DP.
BITBUS (INTEL)
-
topologia: barramento.
-
Método de acesso ao meio: Mestre/Escravos.
-
integração de sensores, atuadores, controladores e instrumentos de
medição.
-
arquitetura de apenas três camadas (1, 2 e 7).
-
Camada física: interface padrão RS-485 com par trançado e taxas
de transmissão de 1 Mbps (modo assíncrono) ou 2.4 Mbps (modo
síncrono).
-
Camada de enlace: protocolo SDLC (Synchronous Data Link and
Control), um sub-conjunto do protocolo HDLC.
-
Processador Intel 8044 implementa este protocolo em hardware.
BITBUS (INTEL)
8044
Buffer
recepção
8051
Buffer
transmissão
DPRAM
SIU
BITBUS (INTEL)
Camada de aplicação: serviços RAC (Remote Access and Control)
Serviço
Função de A cesso
Função de C om ando
R eset_S lave
X
C reate_T ask
X
D elete_T ask
X
G et_Functio n_ID
X
R A C _Protect
X
R ead_IO
X
W rite_IO
X
U pdate_IO
X
U p lo ad_M emo ry
X
D o w nlo ad_M emo ry
X
O R _IO
X
AN D _IO
X
X O R _IO
X
Status_Read
X
Status_W rite
X
Redes para Sistemas Embarcados
CAN
•
Rede CAN (Controller Area Network) desenvolvida pela
BOSCH para integrar elementos inteligentes em veículos
autônomos (eletrônica embarcada).
•
Automóvel pode possuir mais de 200 microprocessadores:
-
carburação eletrônica
-
frenagem anti-bloqueante (ABS)
-
controle e supervisão da temperatura do óleo e do
radiador, pressão de óleo de freio, etc.
-
ajuste automático de espelhos retrovisores, banco do
motorista, etc.
CAN
• CAN lançado em 1984.
• Em 1987 lançado chip 82526 (INTEL).
• A partir de 1991 outros fabricantes licenciados:
– Phillips/Signetics (chips 82C200, 87C592, 82CE598 e
82C150).
– Motorola (chip 68HC05).
– NEC (chip 72005).
– Siemens, Thompson, National, Hitachi.
• CiA (CAN in Automation): entidade constituída de usuários e
fabricantes de produtos para automação industrial baseados no
protocolo.
• CAN vendeu mais de 5 milhões de chips só em 1995.
CAN
• Camada física (padrão ISO/DIS 11898):
− Topologia: barramento ou estrela (com concentrador);
− Taxa de transmissão: 125 Kbps até 1 Mbps;
− Comprimento máximo do barramento: 40 m para 1
Mbps; até 1 Km para 125 Kbps;
− Número máximo de nós: 64;
− Codificação de bits: NRZ (Non Return to Zero);
− Meio de transmissão: não especificado na norma, mas
usualmente usado par trançado ou fibra ótica.
CAN
• Subcamada MAC:
− Método de acesso ao meio: Forcing Headers com
prioridades para mensagens.
• Subcamada LLC:
− Comprimento máximo dos quadros de dados: 8 Bytes;
− Controle de erro por CRC de 16 bits.
• Camadas 3 até 6 do RM-OSI foram suprimidas.
CAN – Enlace
• CSMA/NBA - Carrier Sense Multiple access with Nondestructive Bitwise Arbitration (Forcing Headers)
• Qualquer nó pode acessar o meio se estiver livre
• NBA garante 100% de utilização do meio e priorização de
mensagens baseada no identificador de 11 bits do frame
Frame CAN
S
O
F
11 bit
IDENTIFIER
Arbitration
Field
Control Length
Field
0 to 8 bytes Data
CRC
A E
C O
K F
Data Field
SOF - Start of Frame
EOF – End of Frame
CRC - Cyclic Redundancy Check (CRC 16)
ACK - Acknowledgment
CAN – Exemplo De Arbitragem
Nó 1 Transmite:
0
10110110100
0
0
0
1
00000001
E
xxxx 11 O
F
Nó 2 Transmite:
0
Nó 2 perde arbitragem
e pára transmissão!
10110111
No meio:
0
10110110100
0
0
0
1
00000001
E
xxxx 01 O
F
CAN
• Modelos de comunicação:
– Frame não contém campos específicos para
endereço destino/origem.
– Campo IDENTIFIER pode conter endereço de uma
estação, grupo de estações (multicasting) ou
mensagens são difundidas para todas as estações
(broadcasting).
– Campo IDENTIFIER pode identificar o conteúdo da
mensagem (dados), que é difundida para todas as
estações.
» Gerador da mensagem: PRODUTOR.
» Estações interessadas no conteúdo da
mensagem: CONSUMIDORES.
CAN
• Norma CAN não define especificação para a camada de Aplicação
• CiA definiu uma especificação para aplicações em automação:
− CMS (CAN Message Services): serviços de leitura e escrita
de variáveis remotas e tratamento de eventos, baseados no
MMS;
− NMT (Network Menagement): serviços de inicialização e
gerenciamento da rede;
− DBT (Distributor): provê uma distribuição dinâmica de
nomes definidos pelo usuário para identificar as mensagens.
• O sistema suporta até 2032 objetos, aos quais é associado um
número de identificação único na aplicação.
• O tempo para leitura de dados a nível da camada de enlace é da
ordem de 420 µs para o objeto de maior prioridade.
• CAN tornou-se norma internacional definida pela ISO em 1993 sob
a designação ISO 11898.
VAN
• A rede VAN (Vehicle Area Network) foi
normalizada em 1990 na França pelo “Bureau de
Normalisation de l'Automobile” para operar em
eletrônica embarcada.
• A partir de 1992 passou a ser adotada pela Renault e
pela Peugeot.
• Apesar das semelhanças com a rede CAN, não se
conhecem aplicações da rede VAN em automação
industrial.
• Os chips disponíveis estão implementados na forma
de ASICs projetados especificamente para a
indústria automobilística.
VAN
• Propriedades da camada física:
− Topologia: barramento;
− Taxa de transmissão: de 100 Kbps até 250
Kbps;
− Número máximo de nós: 16;
− Comprimento máximo do barramento: 20
metros;
− Codificação de bits: Manchester.
VAN
• Subcamada MAC:
− Método de acesso ao meio: Forcing Headers (como CAN);
− Controle de erros: assumido pela subcamada MAC, que usa
a técnica de CRC;
• Subcamada LLC:
− Quadro de dados: 8 bytes ou 28 bytes (versão FullVAN);
Outras redes para veículos
• J1850 (definida nos EUA pela SAE = Society of
Automotive Engineers), usada pela GM, Ford e
Chrysler.
• C2D (Chrysler Collision Detection)
• MIL-STD-1553B (para aviônica militar)
• FlexRay (X-By-Wire)
• todas com uso restrito à eletrônica embarcada.
SERCOS
• SERCOS (SErial Real-time COmmunication
System) apresentada ao mercado na EMO de 1989.
• conecta servo-acionamentos a um CNC em
máquinas operatrizes, implementando malhas
fechadas de controle.
• No interior de uma máquina-ferramenta existem
campos eletromagnéticos fortes.
• Por isto, foi proposta uma rede com topologia em
anel utilizando como meio físico a fibra ótica.
SERCOS
• Anel SERCOS
CNC
Acionamentos
SERCOS
• O sistema tem uma estrutura com comando centralizado.
• CNC exerce o papel de estação mestre e os servo-acionamentos
o papel de estações escravas.
• podem ser executados ciclos de varredura dos escravos em
tempos ajustáveis de 62µs, 125µs, 250µs, 500µs, e múltiplos de 1
ms até o limite de 65 ms.
• SERCOS permite a interligação de até 254 escravos em um
anel.
• O comprimento do cabo é de 40 metros para fibra ótica plástica
e de até 1000 metros para fibra ótica de vidro.
• CNC executa o controle de posição enquanto o controle de
velocidade e de corrente é executado no próprio acionamento.
• Rede usada para enviar valores de referência de velocidade do
CNC aos acionamentos e receber valores atualizados dos
mesmos.
SERCOS
• Na camada de enlace, SERCOS faz distinção entre dois tipos de
dados:
– Dados cíclicos, com características de tempo real, usados
para controle em malha fechada;
– Dados de serviço, usados para configuração, envio de
parâmetros, etc.
• Para dados de serviço é usada uma pilha com 3 camadas
(física, enlace e aplicação).
• Para os dados cíclicos é ainda incluída uma camada de
sincronização (sincronização dos timers das estações)
• A subcamada LLC usa um serviço sem conexão e sem
reconhecimento (quadros errados não são retransmitidos).
SERCOS
• Camada de aplicação: composta de serviços tipo
leitura e escrita de variáveis remotas (READ/
WRITE).
• SERCOS vem sendo utilizada também para
interligar dispositivos em outras aplicações além
das máquinas-ferramenta.
• Entre as aplicações mais usuais estão o controle de
eixos de robôs industriais e conexão de sensores e
atuadores binários.
Mais Redes Locais Industriais!
DeviceNet
• DeviceNet é uma rede industrial de baixo custo para
conectar dispositivos como chaves fim de curso,
células fotoelétricas, válvulas, motores, drives,
displays de CLP e PC, etc.
• DeviceNet foi desenvolvida tendo CAN como base.
• DeviceNet oferece manipulação robusta e eficiente
de dados e é baseada na técnica produtor /
consumidor.
DeviceNet
• A ODVA (open DeviceNet Vendor Association) é uma
organização independente que supervisiona e gerencia
as especificações da DeviceNet.
• Seu objetivo é promover a adoção mundial de
DeviceNet como rede aberta.
• A ODVA trabalha conjuntamente com os membros
vendedores, usuários finais e distribuidores.
• Possui 320 membros (até julho de 2001).
• Home-pages:
– http://www.odva.org
– http://www.ab.com/catalogs/b113/comm/dnet.html
DeviceNet – Arquitetura
Camada 7
Camada 2
{
{
Application Layer
}
DeviceNet
Data Link Layer
CAN
Physical Signaling
Camada 1
Transceiver
Transmission Media
}
DeviceNet
DeviceNet - Camada Física
Ramificações
Daisy-chain
•
•
•
•
•
•
•
Configuração em barra (daisy-chain ou ramificações)
Nós podem ser removidos sem interromper linha
Até 64 nós endereçáveis
Sinal e alimentação de 24vdc no mesmo cabo
Taxas transmissão: 125kbps, 250kbps, 500kbps
Conectores selados ou abertos
Terminador de 121 ohms nas extremidades
DeviceNet – Alimentação e Sinal
24vdc
PS
• Par trançado com dois fios:
– Par Sinal: baixa perda, alta velocidade.
– Par Alimentação: até 8A corrente.
• Sensores alimentados da linha.
• Opto-isolamento para dispositivos com alimentação própria
(Ex.: drive, PLC, etc.).
• Pode-se usar várias fontes de alimentação.
DeviceNet - Conectores
Selados:
T - Tap
Drop lines
Multiport Tap
- 0 a 6m
Abertos:
Droplines
Droplines
DeviceNet - Daisy-Chaining
Tap
Tap
Dropline
Até 6 metros do Tap
Conector plug-in
para dispositivo
Usar em painéis de
controle que
agrupam
dispositivos
DeviceNet – Distâncias e Velocidades
Data
Rate
Barramento
Ramificações
Dist. TAP
Cumulativo
125K
500m
26 x 6m
156m
250K
250m
13 x 6m
78m
500K
100m
6 x 6m
36m
DeviceNet - Enlace
• Enlace segue sistema CAN.
• Formas de comunicação suportadas através do modelo
produtor/consumidor:
– Master/Slave: escravos só enviam dados em resposta
a varredura do mestre.
– Multi-master: vários mestres e vários escravos.
– Mudança de estado dos dados: envio de dados entre
estações predefinidas sempre que houver alteração de
estado.
– Produção cíclica de dados: estações enviam dados
entre si em intervalos fixos de tempo.
Uso Do Campo Identifier
IDENTIFIER BITS
10
0
9
8
7
6
5
Group 1 Msg ID
1
0
MAC ID
1
1
Group 3
Message ID
1
1
1
1
1
1
1
1
1
1
4
3
2
1
0
IDENTITY USAGE
000-3ff
Message Group 1
400-5ff
Message Group 2
Source MAC ID
600-7bf
Message Group 3
Group 4 Message ID
(0-2f)
7c0-7ef
Message Group 4
7f0-7ff
Invalid CAN Identifiers
Source MAC ID
Group 2
Message ID
1
HEX RANGE
1
X
X
X
X
Grupos 1 e 2 – Master/Slave
IDENTIFIER BITS
10 9
0
0
0
0
8 7 6
Group 1
Message ID
1
1 0 1
1
1 1 0
1
1 1 1
5
4
DESCRIPTION
3
2
1
0
Source MAC ID
Source MAC ID
Source MAC ID
Source MAC ID
MAC ID
1
1
1
1
1
1
1
0
0
0
0
0
0
0
Source MAC ID
Source MAC ID
Source MAC ID
Source MAC ID
Destination MAC ID
Destination MAC ID
1
1
0
0
Destination MAC ID
Destination MAC ID
Group 2
Message ID
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Group 1 Messages
Slave's I/O Change of State or CyclicMessage
Slave's I/O Bit-Strobe Response Message
Slave's I/O Poll Response Message
Group 2 Messages
Master's I/O Bit-Strobe Command Message
Reserved for Master's Use -- Use is TBD
Master'sChg of state/cyclic acknowledge msgs
Slave's Explicit Response Messages
Master's Connected Explicit Request Messages
Master's I/O Poll Cmd/Chg of State/Cyclic Msgs
Group 2 Only Unconnected Explicit Req.. Msgs
Duplicate MAC ID Check Messages
DeviceNet – Camada de Aplicação
• CIP: Common Industrial Protocol
• Definição do campo Identifier
– Estabelece prioridade no processo de arbitragem
– usado pelos nós receptores para identificar mensagens
• Dois tipos de mensagens
– Mensagens de I/O para dados de controle críticos no tempo
– Mensagens explicitas para funções cliente/servidor
– Fragmentação para dados maiores que 8 bytes
• Detecção de identificadores duplicados
• Verificação de consistência dos dados de
aplicação
ControlNet
• ControlNet International é uma organização independente
criada em 1997 que mantém e distribui a especificação
ControlNet e gerencia is esforços de marketing dos
membros associados.
• Home-page: www.controlnet.org
• Mais infos: www.ab.com/catalog/b113/comm/cnet.html
ControlNet
• Onde usar: níveis intermediários (célula, área)
ControlNet
• Camada física:
–
–
–
–
Topologias: barramento, árvore, estrela
Taxa transmissão: 5 Mbps
Estações endereçáveis: até 99
Distâncias:
» Cabo coaxial RG-6: 1.000 m com 2 nós, 500 m com 32 nós,
250 m com 48 nós (sem repetidores), máximo de 5.000 m
com 5 repetidores
» Fibra: 3.000 m sem repetidores, até 30 km com 5
repetidores
ControlNet
• Camada de enlace:
– Controle de erros no frame por Cyclic Redundancy Check,
polinômio CCITT modificado com 16 bits.
– Campo de dados com até 510 bytes.
– MAC: CTDMA (Concurrent Time Domain Multiple Access), que
regula a oportunidade de transmitir de cada nó em intervalos de
tempo ajustáveis chamados NUT (Network Update Time). A
menor NUT é de 2ms.
– Informações com restrições temporais são enviadas na parte
escalonada da NUT. Dados sem restrições temporais (ex.: Dados de
configuração) são enviados nos intervalos restantes de tempo.
•
ControlNet
Camada de aplicação:
– Orientação a objetos
– Modos de comunicação:
» Master/Slave
» Multi-Master
» Peer-to-Peer
» Produtor/consumidor
– Leitura de dados:
» Mudança de estado
» Cíclico
» Por solicitação
HART
• HART = Highway Addressable Remote Transducer
• Protocolo de transição entre tecnologia analógica e
digital.
• “HUG”: HART User Group (inclui Siemens, Hitachi,
Toshiba, Yokogawa, ABB, Endress+Hauser, Fischer &
Porter, Rosemount Inc., Camile Bauer, Smar
International e outras).
• HART Communication Foundation
(www.hartcomm.org)
HART
• Camada física:
- Meio físico: par trançado com até 3.000 m;
- Taxa de transmissão: 1.200 bps;
- Transmissão assíncrona com caracteres UART (1
start bit, 8 bits de dados, 1 bit de paridade e 1 stop
bit);
- Topologia: barramento ou árvore;
- Modulação: FSK (padrão Bell 202, lógico 1 =>
sinal de 1.200 Hz, lógico 0 => 2.200 Hz).
HART
• Camada de enlace:
- mestre-escravos e token-passing;
- Tempo médio de resposta: 378.5 ms;
• Camada de aplicação:
- comandos, respostas, definição de tipos de
dados e emissão de relatórios de status.
HART
• Possível transmitir sinais de 4 a 20 mA (analógicos) e
quadros digitais simultaneamente.
• Os chips HT2012 (Smar Research) e SYM20C15
(Symbios Logic) servem como modems de baixa
potência para uso em equipamentos de campo.
• O chip requer a adição de filtros e comparadores para a
operação do protocolo.
HART
CLP
Bell
202
Sensor
digital
Sensor
digital
I
Bell
202
FPA
FPA
FPA
FPA
Sensor
digital
Atuador
digital
FPA
4..20
mA
t
4..20
mA
FPB
FPB
Sensor
analógico
Atuador
analógico
...
Atuador
digital
Bell
202
INTERBUS-S
• Interbus-S desenvolvido na Alemanha pela empresa Phoenix
Contact.
• Obteve ampla aceitação industrial (mais de 5.000 aplicações).
• Interbus-S concebido para integração de sensores a atuadores
a um elemento de tomada de decisão (CLP, CNC, RC, etc.).
• Elemento de tomada de decisão opera como estação mestre.
• Sensores e atuadores são estações escravas que executam
operações de entrada/saída.
• Interbus-S adotou uma topologia em anel
• Método de varredura denominado "Quadro Concatenado"
ou "Quadro Somado" (do alemão "SummenrahmenVerfahren").
INTERBUS-S
• Mestre monta um quadro único contendo campos
reservados para cada um dos escravos.
• Mestre preenche o campo reservado àquele escravo com os
dados de processo ou parâmetros a enviar.
• O quadro então é enviado ao primeiro escravo no anel.
• O primeiro escravo reconhece no quadro o início de sua
janela de dados e verifica o conteúdo somente do campo
reservado a ele.
• Escravo lê a informação contida no seu campo reservado e
substitui o conteúdo do campo pelos dados de resposta.
• Em seguida, o primeiro escravo envia o quadro completo
para o próximo escravo no anel.
• O processo se repete até que o quadro tenha percorrido
todos os escravos do anel e retornado ao mestre.
INTERBUS-S
• Analogia com um trem (quadro somado) que pára em diversas
estações (escravos), deixando alguns passageiros e pegando
outros.
Master
Slave 1
Slave 2
Slave 3
Slave 4
C FCS M4 M3 M2 M1 H
Frame
Lê
M1
At.
M1
Lê
M2
At.
M2
Lê
M3
At.
M3
Lê
M4
At.
M4
INTERBUS-S
• O tempo que o quadro somado leva para percorrer o anel (ciclo
de varredura) depende do número de escravos e é determinista.
• O número máximo de entradas e saídas suportadas pelo
Interbus-S é de 2048, que podem ser varridas em 7.2 ms.
• Distância entre estações consecutivas no anel: até 400 metros.
• Número máximo de estações: 256 (anel pode ocupar 13 Km sem
repetidores).
• Taxa de transmissão: 500 Kbps.
• As informações que o mestre envia para os escravos podem ser:
– dados de processo: comandos a executar ou valores a
colocar em uma saída (sujeitos à restrições de tempo real);
– parâmetros de configuração do escravo (sem restrições de
tempo): enviados em time slots reservados no quadro
somado.
INTERBUS-S
• Camada de aplicação: define serviços PMS (Peripherals
Message Services), subconjunto do MMS.
• Os serviços PMS incluem:
• gerenciamento de conexões;
• identificação e verificação de status;
• gerenciamento de objetos;
• acesso a variáveis (read, write, update, etc.);
• gerenciamento de programas (dowload, upload,
start, stop, resume, etc.).
• Organizações de empresas DRIVECOM e ENCOM
ocupadas de definir padrões de utilização e configuração
para INTERBUS-S.
• Sistema candidato à padronização pela IEC e DIN
ASI-BUS
• ASI (Actuator/Sensor Interface) desenvolvido por
11 empresas (Balluf, Baumer, Elesta, Festo, IFM,
Peperl+Fuchs, Sick, Siemens, Leuze, Turck e
Visolux) e introduzido no mercado em 1993.
• concebido para interligar elementos periféricos
(sensores e atuadores) binários, tais como chaves
fim-de-curso, sensores de proximidade indutivos
e capacitivos, relês, válvulas, etc.
• Estes elementos requerem informação mínima
para operar (na maioria dos casos, 1 bit com
comandos tipo ON/OFF).
ASI-BUS
• ASI foi concebido como um sistema Mestre/Escravos com
topologia em barramento.
• O mestre executa uma varredura cíclica dos escravos,
enviando quadros de solicitação de dados e aguardando um
quadro de resposta.
• Os quadros enviados pelo mestre ASI tem um campo de dados
de apenas 4 bits e um campo de parâmetros de mais 4 bits.
• O quadro tem 17 bits no total.
1
1
5 bit slave addr.
Command-bit
Start bit
4 bit parameter
4 bit data
1
1
Test bit
Stop bit
ASI-BUS
• O quadro de resposta do escravo composto de apenas 7
bits.
• Como todas as respostas são destinadas ao mestre, não é
necessário um campo de endereço neste quadro.
1
4 bit data
1
1
Test bit
Start bit
Stop bit
ASI-BUS
• quadros utilizados sempre iguais
• a varredura de cada escravo implica no envio e recepção de um
total de apenas 24 bits
• Cada escravo recebe 4 bits de dados e 4 bits de parâmetros, e
responde, se for o caso, também com 4 bits de dados.
• Um escravo ASI possui até 4 portas de I/O conectadas a
dispositivos periféricos
• Cada porta de saída recebe o valor de 1 dos 4 bits do campo de
dados do quadro enviado pelo mestre.
• Se as portas estão configuradas como entradas, seu valor é
copiado nos 4 bits correspondentes do campo de dados do
quadro de resposta do escravo.
• Desta forma, o mestre pode ler ou escrever em qualquer uma
das portas remotas dos escravos.
ASI-BUS
ASI
Master
Slave 1
I/O 1
Slave 2
...
Slave 31
I/O 120
I/O 4
I/O 124
ASI-BUS
• ASI suporta até 31 escravos em um barramento.
• Como cada escravo pode ter 4 E/S, o número
máximo de elementos binários que podem ser
integrados aos 31 escravos é de 124.
• A varredura completa dos 31 escravos, atualizando
todas as 124 entradas e saídas, requer cerca de 5 ms.
• Esta configuração permite ligar os sensores e
atuadores binários convencionais atuais à rede ASI.
• Os 4 bits de parâmetros recebidos do mestre podem
ser enviados para 4 portas de saída adicionais,
podendo ser utilizados para configurar um
dispositivo mais sofisticado conectado ao escravo.
ASI-BUS
• Esta configuração permite conectar sensores e atuadores
inteligentes à rede ASI.
Dados I/O
Slave
ASI
Sensor
inteligente
parâmetros
ASI-BUS
• O cabo de rede ASI é composto de 2 condutores
não blindados.
• cabo é utilizado também para a alimentação dos
escravos (24V DC, 100 mA por escravo).
• Um segmento de rede ASI pode ter até 100
metros de comprimento.
• A grande vantagem de ASI sobre outras rede
tipo fieldbus é o custo baixo e simplicidade de
implementação, operação e manutenção.
• Sua aplicação em automação industrial vem
crescendo muito desde seu lançamento em 1993.
FAIS
• FAIS (Factory Automation Interconnection System):
desenvolvida no Japão por 30 empresas e o International
Robotics and Factory Automation Center (IROFA).
• Primeiros produtos lançados em 1992.
• FAIS é uma versão atualizada da rede Mini-MAP.
• Foi concebida para uso em automação fabril no nível
hierárquico de célula (FMC).
• Arquitetura FAIS composta das camadas 1, 2 e 7.
• Camada física:
– cabo coaxial com técnica de transmissão em CarrierBand com 5 ou 10 Mbps.
– fibra ótica com 10 Mbps.
FAIS
• Camada de enlace de dados:
– subcamada MAC: protocolo Token-Bus, conforme IEEE
802.4.
– subcamada
LLC:
serviço
sem
conexão
com
reconhecimento (LLC tipo 3), conforme IEEE 802.2.
• Camada de aplicação:
– MMS (Manufacturing Message Services);
– serviços de gerenciamento de rede NM (Network
Menagement);
– dicionário de objetos OD (Object Dicionary).
• Alterações básicas em relação a mini-MAP: camada física
com fibra ótica e serviços de aplicação NM e OD.
FAIS
• Especificação FAIS 2.0
Aplicação
MMS
NM
OD
Apresentação
Sessão
VAZIO
Transporte
Rede
Enlace
Física
LLC 802.2 tipo 3
MAC 802.4 Token bus
Baseband 5 / 10 Mbps
Fibra ótica 10 Mbps
P-NET
• P-NET desenvolvida na Dinamarca pela empresa Ultrakust.
• Aplicação alvo: automação industrial.
• Camada física:
– topologia em anel
– taxa de transmissão de 76.8 Kbps
– em um anel podem estar no máximo 125 estações.
– meio físico tipo par trançado blindado, com até 1.200
metros de comprimento, sem repeaters.
•
P-NET
subcamada MAC:
– método de acesso ao meio tipo Multi-mestre / Escravos.
– Em um anel podem estar até 32 estações mestras.
– Entre as estações mestras e escravas é realizada uma
varredura cíclica através de quadro pré-definidos.
– A varredura de cada escravo requer 30 slot times, ou
cerca de 390µs.
– Entre as estações mestras, o controle de acesso ao meio é
do tipo token-passing.
– A passagem de token entre mestres requer no máximo 10
slot times, ou cerca de 130µs.
– Apesar do token passar pelas estações escravas, uma vez
que elas estão também no anel, estas não podem retê-lo.
P-NET
Anel P-NET:
PC
Pressão
M
E
Temperatura
Motor
E
CLP
E
M
M
Vazão
E
E
Peso
Controller
P-NET
• Vários anéis interligados por meio de P-NET-Controllers,
que executam a função de roteadores ou gateways.
M
E
E
E
M
Controller
M
M
E
E
E
E
M
E
M
M
E
E
E
M
Controller
M
E
E
P-NET
• O P-NET-Controller pode ser usado para conectar
dispositivos não desenvolvidos para a P-NET que possuam
uma interface RS-232C, ou ainda estações para outro tipo de
rede (por exemplo, Profibus).
• O Controller é programado em Process Pascal, que suporta
programação concorrente e primitivas de comunicação.
• Diversos sistemas baseados em P-NET estão em operação na
Europa.
• Foi criada para a P-NET uma organização de fabricantes e
usuários que dão suporte ao produto, denominada
"International P-NET User Organization".
MODBUS
• MODBUS criado em 1978 pela MODICON – Modular
Digital Controller (hoje Schneider Automation).
• Protocolo visava transferir dados entre controladores,
sensores e atuadores usando uma porta RS232.
• Tornou-se padrão industrial “de-facto” usado com uma
segunda opção para intercâmbio de dados.
• Protocolo proprietário da Schneider Automation, mas a
empresa optou por uma licença sem royalties.
• Site: http://www.modbus.org/
MODBUS
• Regulamentação:
– EN 1434-3 (camada 7)
– IEC 870-5 (camada 2)
– Não há especificação para a camada física.
• No padrão Modbus estão definidos:
– o formato das mensagens
– os serviços (ou funções)
– o protocolo de comunicação, ou seja, como esses
elementos trocam dados na rede.
MODBUS
• O protocolo Modbus é utilizado para:
– monitoração e programação de dispositivos,
– comunicação entre dispositivos inteligentes
(por exemplo, CLPs e CNCs) com sensores,
atuadores, e instrumentos de campo
– Monitoração de dispositivos de campo
usando-se PCs e IHMs
MODBUS
• O protocolo Modbus estabelece uma comunicação master-slave
entre dispositivos inteligentes.
• O protocolo define como cada dispositivo sabe o seu endereço,
reconhece que uma mensagem foi enviada para ele, determina o
tipo de ação a ser tomada e extrai dados e informações contidos na
mensagem.
• Da mesma forma, se uma resposta for necessária, o escravo deve
construir uma mensagem de resposta e enviá-la.
• Exemplos de dispositivos mestres: computadores tipo PC ou IC,
painéis de programação e CLPs.
• O mestre pode se dirigir individualmente a um dos escravos, ou
pode enviar uma mensagem tipo broadcast para todos os escravos.
• Os escravos apenas retornam uma mensagem (resposta) quando
são questionados individualmente.
MODBUS
• As mensagens são enviadas de forma serial, iniciando pelo bit
menos significativo.
• Frame Modbus contém o endereço do escravo, um código de
função que define a ação a ser tomada, o dado e um checksum
(campo de verificação de erro, que pode ser LRC ou CRC).
• A resposta do escravo tem estrutura semelhante e contêm campos
confirmando a ação tomada (código de função), eventualmente um
dado requisitado pelo mestre (dado) e o campo de verificação de
erros.
• Se ocorrer um erro no recebimento da mensagem, ou se o escravo
for incapaz de realizar a ação requerida, o escravo deverá enviar
uma mensagem de erro ao mestre.
MODBUS
• MODBUS é independente da camada física
subjacente.
• MODBUS é usualmente implementado usando:
– RS232;
– RS422;
– RS485;
– sobre uma variedade de meios de transmissão (fibra,
rádio, celular, etc.).
Modos de Transmissão
• MODBUS suporta dois modos de transmissão:
– ASCII (American Standard Code for Information
Interchange):
» cada byte da mensagem é enviado como caractere ASCII.
» Usado para texto.
– RTU (Remote Terminal Unit):
» cada byte da mensagem é enviado como 2 caracteres
hexadecimais de 4 bits.
» Usado para dados hexadecimais.
Modo ASCII
• Permite intervalos de tempo de até 1 segundo entre
caracteres sem gerar erro (transmissão assíncrona).
• Sistema de Codificação: caracteres ASCII em
hexadecimal.
• Codificação dos caracteres (10 bits):
– 1 start bit
– 7 data bits (o bit menos significativo é enviado primeiro)
– 1 bit de paridade quando for utilizada paridade par/ímpar ou
zero bits quando não for utilizada paridade
– 1 stop bit se for utilizada paridade ou 2 bits se não for
utilizada paridade.
• Campo de Checagem de Erro: Longitudinal
Redundancy Check (LRC).
Modo RTU
• Permite uma melhor data throughput que o modo ASCII para a
mesma taxa de transmissão.
• Cada mensagem deve ser transmitida em um fluxo contínuo
(transmissão síncrona).
• Sistema de Codificação: binária de 8 bits, hexadecimal.
• Codificação dos caracteres (11 bits):
– 1 start bit
– 8 data bits (o bit menos significativo é enviado primeiro)
– 1 bit de paridade quando for utilizada paridade par/ímpar ou zero bits
quando não for utilizado paridade
– 1 stop bit se for utilizado paridade ou 2 bits se não for utilizado
paridade.
• Campo de Checagem de Erro: Cyclic Redundancy Check (CRC).
Frame Modbus
• Em ambos os modos (ASCII ou RTU), a mensagem a
ser transmitida é colocada, pelo dispositivo transmissor,
num formato que possui um início e um fim conhecidos
(frame).
• Toda comunicação inicia com o mestre fazendo uma
solicitação a um escravo, e este responde ao mestre o
que foi solicitado.
• Apenas o campo de dados possui tamanho variável.
ADDRESS
FUNCTION
DATA
CHECKSUM
Frame MODBUS
• Address (endereço):
– Contém 2 caracteres ASCII ou 8 bits RTU.
– Endereços válidos de escravos na faixa de 0 a 247
decimal.
– Endereços individuais estão na faixa de 1 a 247 (0
para broadcasting).
Frame MODBUS
• Function (função):
– Contém 2 caracteres (ASCII) ou 8 bits (RTU).
– Códigos válidos vão de 1 a 255 decimal.
– Este campo indica ao escravo que ação este deve executar:
»
»
»
»
»
ler grupo de entradas;
ler dados de um grupo de registradores;
ler status do escravo para diagnóstico;
escrever em um grupo de saídas ou registros;
permitir carregamento, gravação ou verificação do programa no
escravo.
– Na resposta, campo indica se a operação ocorreu sem erros
(ecoa dado recebido) ou se é uma resposta de exceção (ecoa
dado recebido com Msb em 1).
Frame MODBUS
• Data (dados):
– Contém dados adicionais para uso do escravo (endereços de
portas de I/O ou registros, quantidades de itens a manipular, etc.).
– Se não houverem erros, campo retorna o valor solicitado ao
escravo.
– Se houver erro, campo retorna um código de exceção.
– Este campo pode ser vazio.
» Ex.: mestre pede ao escravo o seu communications event log
(código de função: 0Bh), o escravo não necessita de qualquer
informação adicional.
– Este campo possui tamanho variável.
» Ex. 1: mestre pede ao escravo para ler um grupo de registradores do
tipo holding (código da função: 03h), o campo de dados especifica o
registrador de início e quantos registradores devem ser lidos.
» Ex. 2: mestre escreve em um grupo de registradores do escravo
(código da função: 10h), o campo de dados especifica o registrador
de início, quantos registradores ele quer escrever, o total de bytes de
dados que segue o campo de dados e os dados que devem ser escritos
nos registradores.
Frame MODBUS
• Checksum:
– Modo ASCII:
» Usa checagem de erros por Longitudinal Redundancy Check (LRC).
» O campo de checagem de erros contém dois caracteres ASCII.
» Cálculo do LRC feito sobre o conteúdo da mensagem excluindo-se os
caracteres que delimitam o início e o final da mensagem (‘:’ e CR/LF).
» Os caracteres LRC são adicionados à mensagem como o último campo
antes dos caracteres CR/LF.
– Modo RTU:
» Usa Cyclic Redundancy Check (CRC).
» O campo de checagem de erros contém um valor de 16 bits
implementado como dois bytes de 8 bits.
» Cálculo CRC realizado com o conteúdo da mensagem.
» O CRC é adicionado à mensagem como último campo primeiro o byte menos significativo.
Delimitadores de Frame ASCII
• No modo ASCII, frame inicia com o caractere ‘:’ (ASCII:
3Ah) - FSD, Frame Start Delimiter.
• Frame termina com o par CR/LF (carriage return / line
feed - ASCII: 0Dh e 0Ah) – FED (Frame End Delimiter).
• Os dispositivos conectados à rede ficam monitorando
continuamente o barramento por um FSD.
• Quando um FSD for recebido, cada dispositivo decodifica
o próximo campo (endereço) para descobrir se ele é o
dispositivo endereçado.
• Intervalos de até 1 segundo podem ocorrer entre
caracteres.
• Se um intervalo maior do que esse ocorrer, o dispositivo
receptor assume que ocorreu um erro.
Frame ASCII
Início
Endereço
Função
Dado
Verificação LRC
Fim
1 caractere
2 caracteres
2 caracteres
n caracteres
2 caracteres
2 caracteres
:
CRLF
Delimitadores de Frame RTU
• O início das mensagens é definido por intervalo de silêncio de pelo
menos 3.5 vezes o tempo de transmissão de um caractere.
• Implementado como um múltiplo do tempo de transmissão de um
caractere na taxa de transmissão que está sendo utilizada.
• Os dispositivos conectados à rede ficam continuamente monitorando
o barramento, inclusive nos intervalos de silêncio.
• Quando o primeiro campo (endereço) é recebido, cada dispositivo
decodifica-o para descobrir se é o dispositivo endereçado.
• Ao final do frame, um intervalo similar de pelo menos 3.5 vezes o
tempo de transmissão de um caractere marca o final da mensagem.
• Uma nova mensagem pode iniciar após esse intervalo.
Frame RTU
• Toda a mensagem deve ser transmitida com um fluxo
contínuo.
• Se um intervalo de silêncio maior que 3.5 vezes o tempo
de transmissão de um caractere (palavra de dados - 11
bits) ocorrer antes do término do frame, o dispositivo
receptor detecta a mensagem incompleta e assume que o
próximo byte será o campo endereço de um novo frame.
• Se um novo frame começa antes de 3.5 vezes o tempo de
transmissão de um caractere após o frame anterior, o
dispositivo receptor irá considerá-la como uma
continuação da mensagem anterior.
• Isto irá causar um erro, pois o valor do campo CRC não
será válido para as mensagens combinadas.
Frame RTU
Início
Endereço
Função
Dado
Verificação
CRC
Fim
T1-T2-T3-T4
8 bits
8 bits
n x 8 bits
16 bits
T1-T2-T3-T4
Temporização RTU
Temporização RTU
Taxa de Transmissão
T11 bits
T3.5x
9600 kbps
1.15 ms
4 ms
19200 kbps
573 μs
2 ms
38400 kbps
285 μs
1 ms
Endereçamento
• O mestre inicia a comunicação enviando um byte com o
endereço do escravo para o qual se destina a mensagem.
• Ao enviar a resposta, o escravo também inicia o
telegrama com o seu próprio endereço, possibilitando
que o mestre saiba qual escravo está lhe enviando a
resposta.
• O mestre também pode enviar uma mensagem destinada
ao endereço 0 (zero), o que significa que a mensagem é
destinada a todos os escravos da rede (broadcast).
• Nesse caso, nenhum escravo irá responder ao mestre.
• Quando o protocolo Modbus é utilizado em redes de
mais alto nível hierárquico, broadcasts não são
permitidos ou são substituídos por outros métodos.
Exemplo de uso de funções
• Mensagem do mestre para um escravo para ler um grupo de
registrador do tipo holding:
– código de função: 0000 0011 (03h)
• Se o escravo efetuar a ação requisitada sem erro, ele retorna o
mesmo código na sua resposta.
• Se ocorrer uma exceção, ele retorna: 1000 0011 (83h)
• Além disso, o escravo insere um código único no campo de dados
da mensagem de resposta. Assim, o mestre sabe o tipo de erro que
ocorreu, ou a razão para a exceção.
• O programa de aplicação do dispositivo mestre tem a
responsabilidade de tratar as respostas de exceção.
• Exemplos típicos: enviar novamente a mensagem mais tarde,
tentar mensagens de diagnóstico para o escravo e avisar o
operador da máquina.
Códigos de função do Modbus
111 ... 127
Funções públicas (public function codes)
100 ... 110
Funções definidas
function codes)
pelo
usuário
(user-defined
73 ... 99
Funções públicas (public function codes)
65 ... 72
Funções definidas
function codes)
1 ... 64
Funções públicas (public function codes)
pelo
usuário
(user-defined
Exemplos de Funções públicas Modbus
C ód igo d a
F unção
C ód igo
(Bit Access)
Acesso a 16 Bits (16 Bits Access)
Acesso de Dados (Data Access)
Acesso ao Bit
E n t r a d a s D is c r e t a s F ís i c a s
SubC ó d ig o
(h e x )
R e a d I n p u t D i s c r e te
02
02
B i ts I n te r n o s ( I n t e r n a l B i ts ) o u
R e a d C o il s
01
01
B o b i n a s F ís i c a s ( P h y s ic a l
C o i ls )
W r it e S in g l e C o i l
05
05
W r it e M u l tip l e C o ils
15
0F
R e a d I n p u t R e g is t e r
04
04
R e a d M u l ti p le
R e g is te r s
03
03
W r it e S in g l e R e g i s te r
06
06
16
10
23
17
M a s k W r i te R e g i s te r
22
16
R e a d F il e R e c o r d
20
6
14
W r it e F il e R e c o r d
21
6
15
43
14
2B
( P h y s ic a l D i s c r e te I n p u t s )
R e g i s tr o s d e E n t r a d a F í s i c o s
( P h y s ic a l I n p u t R e g i s te r s )
I n te r n a l R e g is te r s o u P h y s ic a l
O u tp u t R e g is t e r s
W r it e M u l tip l e
R e g is te r s
R e a d / W r i te M u l ti p le
R e g is te r s
F il e R e c o r d A c c e s s
E n c a p s u la t e d I n t e r f a c e
R e a d D e v ic e
I d e n ti f ic a t io n
Funções definidas pelo usuário
• Há duas faixas para os códigos das funções
definidas pelo usuário: 65 a 72 e 100 a 110
decimal.
• O usuário pode selecionar e implementar um
código de função sem aprovação da
comunidade modbus.
• Não há garantia de que o uso da função
selecionada será único.
• Para tornar função pública: procedimento RFC
(Request For Comments).
Controle de erros
• As redes Modbus utilizam dois tipos de checagem de
erros: parity checking (checagem de paridade) e
message frame checking (checagem da estrutura de
mensagens - frame).
• A checagem de paridade pode ser opcionalmente
aplicada a cada um dos caracteres transmitidos.
• A checagem de frame (que pode ser por LRC ou CRC)
é aplicada sobre toda a mensagem.
• Ambas as checagens de erros são geradas no dispositivo
mestre e aplicadas ao conteúdo da mensagem antes dela
ser transmitida.
• O dispositivo escravo confere cada caractere e a
mensagem inteira durante o recebimento da mensagem.
Controle de erros
• O mestre é configurado pelo usuário para esperar por
um determinado intervalo de timeout antes de abortar a
transação.
• Esse intervalo é ajustado para ser suficiente longo de
modo que qualquer escravo possa responder
normalmente.
• Se o escravo detectar um erro de transmissão, ele não
irá construir uma mensagem para o mestre como
resposta.
• Assim, o tempo de timeout irá expirar e dessa forma o
programa do mestre pode tratar o erro.
• Uma mensagem endereçada a um dispositivo escravo
não existente também irá gerar um erro de timeout.
Controle de erros
• O usuário pode configurar dispositivos para realizar checagem de
paridade (par, ímpar ou sem paridade).
• Se for especificada paridade par ou ímpar, a quantidade de bits
será contada na porção de dados de cada caractere (sete bits de
dados para modo ASCII ou oito para RTU).
• Quando uma mensagem é transmitida, o bit de paridade é
calculado e aplicado a cada caractere.
• Todos os dispositivos da rede Modbus devem ser configurados
para usar o mesmo método de checagem de paridade.
• Checagem de paridade pode detectar um erro se um número
ímpar de bits foi modificado durante a transmissão.
• Se não for especificada checagem de paridade, não há bit de
paridade nem a checagem pode ser feita. Nesse caso, um stop bit
adicional é transmitido para completar o caractere.
Controle de erros
• No modo ASCII as mensagens incluem um campo de checagem de
erros, baseado no método LRC.
• O campo LRC verifica o conteúdo da mensagem, excluindo os
caracteres de início e final da mensagem.
• Isto é realizado independentemente do método de checagem de paridade
utilizado para os caracteres individuais da mensagem.
• O campo LRC contém um valor binário de 8 bits.
• O valor LRC é calculado pelo dispositivo transmissor, que acrescenta o
LRC à mensagem.
• O dispositivo receptor calcula o LRC durante o recebimento da
mensagem e compara esse valor com o valor recebido no campo LRC.
Se os dois valores não são iguais, resulta num erro de transmissão.
• O LRC é calculado somando sucessivamente os bytes da mensagem e
descartando eventuais carries (restos) e então fazendo o complemento 2
do resultado. Isto é executado sobre o conteúdo do campo da mensagem
ASCII, desconsiderando os caracteres que delimitam o início e final da
mensagem.
Controle de erros
• No modo RTU, o método de checagem de erros utilizado para o
frame é o CRC (Cycling Redundancy Check).
• O campo CRC verifica o conteúdo da mensagem, excluindo os
caracteres de início e final da mensagem.
• Isto é realizado independentemente do método de checagem de
paridade utilizado para os caracteres individuais da mensagem.
• Esse campo é formado por dois bytes, onde primeiro é
transmitido o byte menos significativo (CRC-) e depois o mais
significativo (CRC+).
• O valor CRC é calculado pelo dispositivo transmissor, que
acrescenta o CRC à mensagem.
• O dispositivo receptor calcula o CRC durante o recebimento da
mensagem e compara esse valor com o valor recebido no campo
CRC. Se os dois valores não são iguais, resulta num erro de
transmissão.
•
Controle de erros
O cálculo do CRC é iniciado carregando-se uma variável de 16
bits com o valor FFFFh. Depois são executados os seguintes
passos:
1. Submete-se o primeiro byte da mensagem (somente os bits de dados – o
start bit, o bit de paridade e o stop bit não são utilizados) a uma lógica XOR
(OU exclusivo) com os 8 bits menos significativos da variável CRC,
retornando o resultado na própria variável CRC.
2. A variável CRC é deslocada uma posição à direita, em direção ao bit menos
significativo, e a posição do bit mais significativo é preenchida com 0
(zero).
3. Após esse deslocamento, o bit de flag (bit que foi deslocado para fora da
variável CRC) é analisado, ocorrendo o seguinte:
4. Se o valor do bit for 0 (zero), nada é feito.
5. Se o valor do bit for 1, o conteúdo da variável CRC é submetido a uma
lógica XOR com um valor constante de A001h (polinômio gerador) e o
resultado é retornado à variável CRC.
6. Repetem-se os passos 2 e 3 até que oito deslocamentos tenham sido feitos.
7. Repetem-se os passos de 1 a 4, utilizando o próximo byte da mensagem, até
que toda a mensagem tenha sido processada.
Controle de erros
• O conteúdo final da variável CRC é o valor do campo
CRC que é transmitido no final do frame.
• A parte menos significativa é transmitida primeiro
(CRC-) e, em seguida, a parte mais significativa
(CRC+).
Variantes
• Variantes do protocolo original:
– MODBUS PLUS:
» protocolo de maior velocidade baseado em token-passing
» usa a estrutura de mensagens do MODBUS original.
» Os chips MODBUS PLUS são disponibilizados pela
Schneider Automation através de um programa chamado
MODCONNECT.
– MODBUS TCP/IP:
» usa TCP/IP e Ethernet para transportar a estrutura de
mensagens MODBUS.
» requer uma licença, mas as especificações são de acesso
público e não há royalties.
MODBUS - Conclusão
• Segundo revista Control Engineering, o protocolo
Modbus é utilizado em 16% das aplicações de motion
control (sistemas de controle de velocidade e posição)
em rede.
• A pesquisa também mostra, que a maioria dos sistemas
de motion control ainda opera de modo independente
(stand alone) - 80% contra 38% de sistemas em rede.
• Dos sistemas que operam em rede: 62% usam
DeviceNet, 22% Profibus-DP e 16% Modbus.
Redes IBM
• A IBM introduziu a tecnologia de token-passing e
oferece uma série de soluções para redes, incluindo,
entre outros:
¾ Rede Token-Ring (IEEE 802.5)
¾ Rede Token-Bus (IEEE 802.4)
¾ Diversos softwares para redes (NetBios, PC-LAN,
LAN-Server, etc.)
¾ Redes baseadas em uma arquitetura própria
denominada SNA (Systems Network Architecture)
Redes IBM
Aplicação
Usuário
Apresentação
serviços NAU
Sessão
Transporte
Fluxo Dados
Controle
Transmissão
Rede
Controle
Caminho
Enlace
Controle
Enlace
Física
Ligação
Física
Arquitetura SNA
UCA
• UCA = Utility Communications Architecture.
• Inicialmente visava integrar dispositivos na área de energia
elétrica.
• Hoje também usado em instalações de gás, óleo, água e esgoto.
• Proposto pelo IEEE e o EPRI (Electric Power Research Institute).
• Atualmente na versão 2.0, especificada no IEEE Technical Report
1550 (IEEE TR 1550), de julho de 1999.
• Padrões:
–
–
–
–
IEC 61850 para automação de subestações;
IEC 60870-6 TASE.2 para troca de dados TR entre centros de controle;
IEC 61970 nos centros de controle;
IEC 61968 para interface do sistema de distribuição.
UCA
Histórico:
UCA
Full 7
CO
WAN 7
CL
Mod 7
CO
Reduc.
CO
Reduc.
CL
FAIS
Ethernet
TCP/IP
RFC1006
TCP/IP
RFC 1070
TCP/IP
RFC 1240
7
MMS
ACSE
MMS
CL-ACSE
MMS
ACSE
MMS
ACSE
MMS
CL-ACSE
MMS
MMS
ACSE
MMS
ACSE
MMS
ACSE
MMS
CL-ACSE
6
Apres.
CL-Apres.
FastByte
Apres.
Apres.
Apres.
CL-Apres.
5
Sessão
CL-Sessao
FastByte
Sessão
Sessão
Sessão
CL-Sessao
4
TP4
CLTP
TP4
TP0
TCP
TP4
CLTP
UDP
UDP
3
CLNP
CLNP
CLNP
IP
IP
IP
2
1
LLC1
ADLC FT3
ou UCA 1
LLC1
ADLC FT3
ou UCA 1
LLC1
ADLC FT3
ou UCA 1
Ethernet
SLIP, PPP
Ethernet
SLIP, PPP
Ethernet
SLIP, PPP
7 camadas
auxiliar
LLC1
ADLC FT3
LLC1
ADLC FT3
ou Ethernet
LLC3
802.4
Token Ring
3 camadas
LLC3
ADLC FT3
sobre
Ethernet
TCP/IP
Industrial Ethernet
• Propostas para TR divididas em 2 categorias:
– Soluções não compatíveis com Ethernet normal:
em geral usam outro MAC acima do existente e só
funcionam se todos os nós são modificados do
mesmo modo (outro MAC usa protocolo
determinista como master-slaves, tokens, TDMA,
etc.).
– Soluções compatíveis com Ethernet normal:
» Soluções Homogêneas: só mantém determinismo se
todos os nós são RT, mas a rede funciona na presença de
nós convencionais (porém sem determinismo).
» Soluções Heterogêneas: estações modificadas tem
comunicação determinista entre elas, mas podem haver
estações convencionais na rede (sem determinismo).
Determinismo depende do uso de SW especiais.
–
Industrial Ethernet
• Varias soluções definidas no padrão IEC 61158
– MODBUS TCP, MODBUS RTPS, PROFINET
CBA, Ethernet/IP: redes adaptadas para ambiente
industrial, mas sem determinismo garantido.
– Ethernet Power-link (EPL), Ethernet for Plant
Automation (EPA), P-Net on IP, VNET/IP, TCnet,
EtherCAT, SERCOS III, PROFINET IO: usam
MAC adicional para determinismo.
– PROFINET CBA: não usa TCP/UDP e IP, mas sim
camadas 3 e 4 especificas.
• Todas tem camada 7 adaptada para aplicações
industriais.
Industrial Ethernet
[J.D. Decotignie]
Redes para Automação Predial
e Residencial
LON
• LON (Local Operating Network): desenvolvida pela empresa
Echolon em 1990
• Aplicações alvo:
– automação predial (imótica)
– automação doméstica (domótica)
– automação de escritórios
– automação industrial.
• Protocolo de comunicação LonTalk é implementado no
processador dedicado NeuronChip, produzido pela Motorola e
Toshiba.
LON
• O NeuronChip é composto dos seguintes elementos:
− 3 processadores de 8 bits (1° executa MAC, 2° serviços
gerais de comunicação, 3° aplicações do usuário);
− Porta de conexão ao transceiver, através do qual o
NeuronChip se conecta ao meio;
− Pinos de entrada e saída, reset, clock e alimentação (5V);
− Acesso a um número de série de 48 bits definido pelo
fabricante;
− Um timer programável;
− Sistema de memória, contendo 10 Kbyte ROM, 1 Kbyte
RAM e 512 Bytes EEPROM para parâmetros de rede;
− 3 temporizadores Watch-Dog (1 para cada processador);
LON
• LonTalk é baseado no RM-OSI e implementa 7 camadas.
• Ferramentas de suporte LonWorks incluem:
− NeuronChip;
− Protocolo LonTalk;
− Transceivers que permitem ligar o NeuronChip ao meio
físico;
− LonBuilder
Developer's
Workbench:
sistema
de
desenvolvimento orientado a objetos para projeto,
implementação e teste de nós LON.
LON
• Camada física: transceivers oferecidos pela Echolon:
− FTT-10: par trançado, taxa de 78 Kbps, 127 nós em um
barramento de até 2.700 metros ou segmentos de até 500
metros com topologia em estrela ou anel;
− LPT-10: par trançado, taxa 78 Kbps, 32 nós com 100 mA
cada, 64 nós com 50 mA ou 128 nós com 25 mA,
barramento de 2.200 metros ou segmentos de até 500 metros
com topologia em estrela ou anel, alimentação pelo fio da
rede;
− TPT/XF-78: par trançado, taxa de 78 Kbps, barramento
com 2.000 metros, 64 nós;
− TPT/XF-1250: semelhante ao anterior, mas com taxa de
transmissão de 1.25 Mbps para distâncias de até 500 metros;
LON
• Camada física: transceivers oferecidos pela Echolon:
− PLT-10A: utiliza como meio físico a rede elétrica por meio da
tecnologia spread spectrum (técnica especial de transmissão
usada em sistemas com elevados níveis de interferência),
operando na faixa de freqüência de 100 KHz até 450 KHz com
taxa de transmissão de 10 Kbps;
− PLT-20: idem ao anterior, mas com freqüência de 125 KHz a
140 KHz com taxa de transmissão de 5.4 Kbps;
− PLT-30: idem aos anteriores, mas com freqüência de 9 a 95
KHz e taxa de 2 Kbps.
LON
• Transceivers de outros fabricantes:
− RF-300: usa sinais de rádio freqüência de 300MHz, taxa de
transmissão de 1.200 bps (rede sem fio);
− RF-450: idem, com 450 MHz e taxa de 4800 bps;
− RF-900: idem, com 900 MHz e taxa de 39 Kbps;
− IR: usa sinais em infravermelho, com taxa de transmissão de
78 Kbps;
− Fibra ótica: taxa de transmissão de 1.25 Mbps;
− Cabo coaxial: taxa de transmissão de 1.25 Mbps.
LON
• Camada de enlace:
– subcamada MAC: CSMA preditivo ppersistente com detecção de colisão e atribuição
de prioridades às mensagens (comportamento
preditivo quando é usado serviço com
reconhecimento)
– subcamada LLC: serviços sem conexão (com ou
sem reconhecimento) e oferece funções de
montagem de quadros e checagem de erros com
CRC.
• Elementos para interconexão de subredes LON:
– roteadores (ex.: RTR-10)
– pontes
LON
Nó
Nó
Fibra ótica
Nó
Nó
Router
Par trançado
Nó
Nó
Nó
Router
Nó
Rede elétrica
Nó
Nó
Nó
Nó
Router
Nó RF
Nó RF
Nó RF
LON
• NeuronChip programado em Neuron C (orientação a objetos,
suporte a programação concorrente, 37 novos tipos de dados
definidos na especificação SNVT (Standard Network Variable
Types) e mecanismos de passagem de mensagem).
• LON ainda pouco conhecido no Brasil.
• Mais de 1 milhão de nós de rede LON instalados nos Estados
Unidos.
• Em 1994 criado grupo "LonMark Interoperability
Association” (inclui empresas como Honeywell, Detriot Edison,
IBM, Microsoft e Leviton).
• Esta associação executa testes e certificação de conformidade para
produtos que queiram ter o logotipo LonMark e define diretivas
para interoperabilidade.
LON
• A maioria dos nós LON instalados estão em aplicações de
automação predial e residencial.
• Existem estações baseadas no NeuronChip para:
– controle de lâmpadas e eletrodomésticos;
– termostatos e sistemas HVAC (Heating, Ventilation and Air
Conditioning, ou calefação, ventilação e ar condicionado);
– sensores de presença e segurança em geral;
– sensores de luminosidade ambiente;
– equipamentos de áudio e vídeo (por exemplo, Home
Theaters);
– gerenciamento de energia;
– controle otimizado de elevadores;
– subsistemas de água e gás (válvulas, sensores de nível e outros
componentes), etc.
Redes para Ambientes Submarinos
Redes Acústicas
• Comunicação subaquática tradicionalmente
limitada a aplicações militares (submarinos,
torpedos teleguiados, sonares).
• Primeiro sistema de comunicação UWA (UnderWater Acoustic): telefone criado em 1945 para
comunicação com submarinos (águas rasas,
modulação FSK de 8 a 11 khz).
Redes Acústicas
• Recentemente surgiram várias aplicações civis:
– Exploração submarina para fins científicos;
– Soldagem e reparação de cascos de navios e dutos por robôs
submarinos;
– Monitoração de poluição;
– Veículos submarinos não tripulados (AUV = Autonomous
Underwater Vehicles);
– Sensores e atuadores submarinos (sismógrafos, válvulas, etc.);
– Comunicação entre mergulhadores;
– Montagem/manutenção/operação de plataformas de
exploração/produção de petróleo.
Redes Acústicas
• Geração de sinais:
– Sinais de rádio: para boa propagação na água,
requerem ondas de baixíssima freqüência (30 a
300 Hz) => antenas grandes e transmissores de alta
potencia.
– Sinais óticos: principal problema não é atenuação,
mas dispersão.
– Sinais acústicos: melhor solução, podem se
propagar na água por milhares de Km.
Redes Acústicas
• Requisitos para tipos de dados mais usuais:
– Sinais de controle (comando de válvulas,
solicitação de status, comandos de navegação para
AUV, etc): requerem cerca de 1Kbps;
– Dados telemetria (hidrofones, sismógrafos, sonares,
etc): requerem cerca de 10Kbps;
– Vídeo: requer de 10Kbps a 500Kbps para boa taxa
atualização.
Redes Acústicas
• Problemas tecnológicos a superar:
– Perda de transmissão: espalhamento de energia e
absorção de som (proporcional ao quadrado da
distância);
– Ruído acústico: pior em águas rasas, portos, etc.
– Reverberação: propagação de sinal por múltiplos
caminhos causada por reflexão em obstáculos
(desvanecimento de Rayleigh);
– Variações espaciais e temporais do meio
(temperatura/densidade água, obstáculos móveis,
etc.): problema pior se estações móveis.
Redes Acústicas
• Considerações de projeto de sistemas UWA:
– Importante eliminar reverberação (muito pior que
rádio).
– Uso de dispositivos direcionados: problemático se
estações móveis;
– Técnicas FSK com tempo de espera entre pulsos de
mesma freqüência (espera ecos desaparecerem);
– Técnicas Spread-Spectrum;
– Uso de equalizadores.
Redes Acústicas
• Tipos de sistemas UWA em uso:
– Longo alcance: 20Km até 2.000Km, modulação FSK
de 200Hz até 10KHz, taxas de transmissão baixas
(típico: 1 bps);
– Médio alcance: 1Km até 20Km, uso em águas rasas,
modulação FSK de 10KHz até 100KHz, 5Kbps;
– Curto alcance: até cerca de 60m, uso para robôs de
manutenção e mergulhadores em águas rasas,
modulação FSK de 1MHz, taxa de 500Kbps.
Redes Acústicas
• Pesquisas atuais:
– Uso de PSK e QAM (Quadrature Amplitude
Modulation) em lugar de FSK;
– Testes com sinais capazes de se propagar por todo o
planeta (testado sinal gerado Austrália e lido na
Califórnia/USA);
– Desenvolvimento de ALAN (Acoustic LAN):
tendência de usar protocolos MACA e MACAW
(IEEE 802.11), multiplexação de canais por TDM
ou CDMA+Spread Spectrum.
Produtos: Conclusão
• Grande variedade de produtos para redes de
comunicação no mercado
• Inicialmente,
produtos
comerciais
existentes
desenvolvidos para automação de escritórios
• Desde a década de 80 já há produtos específicos para
automação
• Consenso sobre a necessidade de definir sistemas de
comunicação padronizados
• Metas:
– Interoperabilidade: bem aceito
– Intercambiabilidade: muito discutido
Download