IDENTIFICAÇÃO EXPERIMENTAL DE UM SISTEMA MAGNETO-REOLÓGICO
Alexandre Silva de Lima
Tese de Doutorado apresentada ao Programa
de Pós-graduação em Engenharia Mecânica,
COPPE, da Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Doutor em Engenharia
Mecânica.
Orientadores: Max Suell Dutra
Fernando Augusto de Noronha
Castro Pinto
Rio de Janeiro
Setembro de 2011
1
2
Lima, Alexandre Silva de
Identificação Experimental de um Sistema Magnetoreológico / Alexandre Silva de Lima. – Rio de Janeiro:
UFRJ/COPPE, 2011.
XV, 105 p.: il.; 29,7 cm.
Orientador: Max Suell Dutra
Fernando Augusto de Noronha Castro
Pinto
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Mecânica, 2011.
Referências Bibliográficas: p. 92-97.
1. Projeto de Máquinas e Robótica. 2. Magnetoreológico. 3. Amortecedor Magneto-reológico. I. Dutra,
Max Suell et. al.; II. Universidade Federal do Rio de
Janeiro, COPPE, Programa de Engenharia Mecânica. III.
Titulo.
3
iii
Aos meus pais Aroldo e Aracy (in memoriam)
4iv
AGRADECIMENTOS
Agradeço
a Deus;
aos professores Max Suell Dutra e Fernando Augusto de Noronha Castro Pinto pelo
entusiasmo e dedicação com que participaram deste trabalho;
à minha família, ao meu irmão Júnior, e a minha companheira Cristina que sempre me
apoiou, abdicando de momentos ao meu lado e sempre me incentivando nos
momentos mais difícies;
a todos os amigos do Laboratório de Robótica pela convivência amigável e pelo
companheirismo;
ao Laboratório de Vibrações;
ao Programa de Engenharia Mecânica, especialmente Maysa Chaves, Vera Lucia e
Tito;
e a todos que de uma forma ou de outra contribuíram para a execução deste trabalho;
5v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
IDENTIFICAÇÃO EXPERIMENTAL DE UM SISTEMA MAGNETO-REOLÓGICO
Alexandre Silva de Lima
Setembro/2011
Orientadores: Max Suell Dutra
Fernando Augusto de Noronha Castro Pinto
Programa: Engenharia Mecânica
A propriedade dos fluidos magneto-reológicos (MRs) de terem sua viscosidade
alterada de forma reversível, permite a construção de sistemas semi-ativos de
amortecimento e controle de vibrações com alto grau de aplicabilidade. Os
amortecedores MR tem sido utilizados em sistemas de realimentação tátil, suspensões
automotivas, amortecedores sísmicos, e até mesmo em próteses transfemorais.
Considerando a aplicabilidade dos amortecedores magneto-reológicos em diferentes
áreas da engenharia, este trabalho tem como objetivo a síntese e análise destes
sistemas através de uma abordagem fenomenológica, que consistiu na análise dos
resultados experimentais obtidos em três configurações diferentes. O modelo do
amortecedor utilizado neste trabalho é baseado no modelo de viscosidade de
Bingham, e com base no comportamento observado em cada um dos experimentos
propostos, é realizada a identificação de parâmetros para o modelo do amortecedor.
Para validação do modelo obtido são realizadas simulações cujos resultados foram
comparados com os resultados medidos nos experimentos.
6vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
EXPERIMENTAL IDENTIFICATION OF A MAGNETORHEOLOGICAL SYSTEM
Alexandre Silva de Lima
September/2011
Advisors: Max Suell Dutra
Fernando Augusto de Noronha Castro Pinto
Department: Mechanical Engineering
The property of the magneto-rheological fluids (MRs) to have its viscosity
changed in a reversible way, allows the construction of systems of semi-active
damping and vibration control with a high degree of applicability. MR dampers has
been used in tactile feedback systems, automotive suspensions, seismic dampers, and
even in transfemoral prosthesis. Considering the applicability of magneto-rheological
dampers in different areas of engineering, this work aims to the synthesis and analysis
of these systems through a phenomenological approach, which consisted on the
analysis of experimental results obtained in three different workbench configurations.
The damper model used in this work was based on the Bingham model for viscosity,
and based on the behavior observed in each of the proposed experiments was
conducted to identify the model parameters for the system. To validate the obtained
model simulations were performed and its results were compared with the measured
data from experiments.
7vii
SUMÁRIO
ÍNDICE DE FIGURAS...................................................................................................X
ÍNDICE DE TABELAS............................................................................................... XV
1
INTRODUÇÃO...................................................................................................... 1
1.1
Objetivo .................................................................................................. 4
1.2
Motivação ............................................................................................... 5
1.3
Grau de Inovação................................................................................... 5
1.4
Estado da Técnica ................................................................................. 5
1.5
Apresentação da tese............................................................................ 8
2
DISPOSITIVOS DE CONTROLE DE VIBRAÇÕES .............................................. 9
2.1
Dispositivo de Controle de Vibrações Passivo................................... 9
2.2
Dispositivo de Controle de Vibrações Ativo ..................................... 10
2.3
Dispositivo de Controle de Vibrações Semi-ativo ............................ 10
3
AMORTECEDORES MAGNETO-REOLÓGICOS............................................... 12
3.1
Amortecedores Magneto-reológicos ................................................. 15
3.2
Modelos Matemáticos do Amortecedor MR ...................................... 17
3.2.1
Modelo de Bingham................................................................................. 18
3.2.2
Modelo de Gamota e Filisko .................................................................... 19
3.2.3
Modelo de Bouc-Wen .............................................................................. 20
3.2.4
Modelo de Bouc-Wen Modificado ............................................................ 21
4
MODELAGEM EXPERIMENTAL........................................................................ 24
4.1
Configuração experimental 1 ............................................................. 24
4.1.1
Resultados .............................................................................................. 29
8viii
4.2
Configuração experimental 2 ............................................................. 37
4.2.1
4.3
Configuração experimental 3 ............................................................. 54
4.3.1
5
Resultados .............................................................................................. 40
Resultados .............................................................................................. 55
FORMULAÇÃO DO AMORTECEDOR MR ........................................................ 70
5.1
Obtenção do Parâmetro f0................................................................... 71
5.2
Obtenção dos Parâmetros fC e c0 ....................................................... 80
6
SIMULAÇÃO ...................................................................................................... 92
7
CONCLUSÃO E TRABALHOS FUTUROS ........................................................ 98
8
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................. 100
9ix
ÍNDICE DE FIGURAS
Figura 1.1 - Aplicação eletro-reológica.(Yang, 2001). ................................................... 1
Figura 1.2 - Suspensão automotiva MR do Cadillac Seville. (Lauwerys et. al., 2002). .. 2
Figura 1.3 - Amortecimento em assentos de veículos pesados (Lord CO.)................... 2
Figura 1.4 - Sistemas de amortecimento sísmicos (Ok, 2007 e Lord CO.). ................... 2
Figura 1.5 – Ponte Pênsil, China. Um par de amortecedores MR foi colocado em cada
um dos cabos de aço de sustentação (Ko et. al., 2003) ........................................ 3
Figura 1.6 - Prótese inteligente (Carlson, 2001 e Lord Co.). ......................................... 3
Figura 1.7 - Sistemas de realimentação tátil (Cunha-Cruz et. al., 2003 e Lord CO.). .... 3
Figura 3.1 - Fluido MR na ausência de um campo magnético (Stutz, 2005). .............. 12
Figura 3.2 - Fluido MR na presença de um campo magnético (Stutz, 2005). .............. 12
Figura 3.3 - Modelo de visco-plasticidade de Bingham (Shames et. al., 1992)............ 13
Figura 3.4 - Modo de válvula (Carlson, 2000). ............................................................ 14
Figura 3.5 - Modo de cisalhamento (Carlson, 2000).................................................... 14
Figura 3.6 - Modo de esmagamento (Carlson, 2000). ................................................. 15
Figura 3.7 - Esquema do amortecedor magneto-reológico (Carlson, 2000). ............... 16
Figura 3.8 - Modelo de Bingham (Spencer, et. al., 1996). ........................................... 18
Figura 3.9 - Modelo proposto por Gamota e Filisko, 1991 (Dyke et. al. 1996)............. 19
Figura 3.10 - Modelo de Bouc-Wen. (Stanway, et al., 1985, 1987). ............................ 20
Figura 3.11 - Modelo de Bouc-Wen Modificado (Spencer, et. al., 1996)...................... 22
Figura 4.1 – Amortecedor magneto-reológico MR RD 1005-3..................................... 24
Figura 4.2 – Esquema da primeira bancada experimental. ......................................... 25
Figura 4.3 – Esquema do circuito conversor montado. ............................................... 27
Figura 4.4 – Circuito conversor de 0 a 5 Vcc para 150 a 800mA. ............................... 27
Figura 4.5 – Primeira bancada experimental............................................................... 28
Figura 4.6 – Detalhe da montagem............................................................................. 28
Figura 4.7 - Gráfico Força x Tempo. Freqüência de 1Hz. ........................................... 29
Figura 4.8 - Gráfico Deslocamento x Tempo. Freqüência de 1Hz. .............................. 30
Figura 4.9 - Gráfico Força x Tempo. Freqüência de 1,5Hz.......................................... 30
Figura 4.10 - Gráfico Deslocamento x Tempo. Freqüência de 1,5Hz. ......................... 31
Figura 4.11 - Gráfico Força x Tempo. Freqüência de 2,0Hz........................................ 31
Figura 4.12 - Gráfico Deslocamento x Tempo. Freqüência de 2,0Hz. ......................... 32
Figura 4.13 - Gráfico Força x Tempo. Freqüência de 2,5Hz........................................ 32
Figura 4.14 - Gráfico Deslocamento x Tempo. Freqüência de 2,5Hz. ......................... 33
Figura 4.15 – Gráfico Força x Tempo. Freqüência de 3,0Hz....................................... 33
x
Figura 4.16 - Gráfico Deslocamento x Tempo. Freqüência de 3,0Hz. ........................ 34
Figura 4.17 - Gráfico Força x Tempo. Freqüência de 3,5Hz........................................ 34
Figura 4.18 - Gráfico Deslocamento x Tempo. Freqüência de 3,5Hz. ......................... 35
Figura 4.19 - Gráfico Força x Tempo. Freqüência de 4Hz. ......................................... 35
Figura 4.20 - Gráfico Deslocamento x Tempo. Freqüência de 4Hz. ............................ 36
Figura 4.21 – Suporte com comunicação via USB com as duas placas encaixadas. .. 38
Figura 4.22 – Segunda bancada experimental............................................................ 38
Figura 4.23 – Detalhe da montagem experimental da segunda bancada.................... 39
Figura 4.24 – Detalhe da fixação do acelerômetro através da sua base magnética.... 39
Figura 4.25 - Gráfico Força x Tempo. 0,25A - 1Hz...................................................... 40
Figura 4.26 - Gráfico Deslocamento x Tempo. 0,25A - 1Hz. ....................................... 40
Figura 4.27 - Gráfico Força x Tempo. 0,50A - 1Hz...................................................... 41
Figura 4.28 - Gráfico Deslocamento x Tempo. 0,50A - 1Hz. ....................................... 41
Figura 4.29 - Gráfico Força x Tempo. 0,75A - 1Hz...................................................... 42
Figura 4.30 - Gráfico Deslocamento x Tempo. 0,75A - 1Hz. ....................................... 42
Figura 4.31 - Gráfico Força x Tempo. 1A - 1Hz........................................................... 43
Figura 4.32 - Gráfico Deslocamento x Tempo. 1A - 1Hz. ............................................ 43
Figura 4.33 - Gráfico Força x Tempo. 0,25A - 2Hz...................................................... 44
Figura 4.34 - Gráfico Deslocamento x Tempo. 0,25A - 2Hz. ....................................... 44
Figura 4.35 - Gráfico Força x Tempo. 0,50A - 2Hz...................................................... 45
Figura 4.36 - Gráfico Deslocamento x Tempo. 0,50A - 2Hz. ....................................... 45
Figura 4.37 - Gráfico Força x Tempo. 0,75A - 2Hz...................................................... 45
Figura 4.38 - Gráfico Deslocamento x Tempo. 0,75A - 2Hz. ....................................... 46
Figura 4.39 - Gráfico Força x Tempo. 1A - 2Hz........................................................... 46
Figura 4.40 - Gráfico Deslocamento x Tempo. 1A - 2Hz. ............................................ 46
Figura 4.41 - Gráfico Força x Tempo. 0,25A - 3Hz...................................................... 47
Figura 4.42 - Gráfico Deslocamento x Tempo. 0,25A - 3Hz. ....................................... 47
Figura 4.43 - Gráfico Força x Tempo. 0,50A - 3Hz...................................................... 48
Figura 4.44 - Gráfico Deslocamento x Tempo. 0,50A - 3Hz. ....................................... 48
Figura 4.45 - Gráfico Força x Tempo. 0,75A - 3Hz...................................................... 49
Figura 4.46 - Gráfico Deslocamento x Tempo. 0,75A - 3Hz. ....................................... 49
Figura 4.47 - Gráfico Força x Tempo. 1A - 3Hz........................................................... 49
Figura 4.48 - Gráfico Deslocamento x Tempo. 1A - 3Hz. ............................................ 50
Figura 4.49 - Gráfico Força x Tempo. 0,25A - 4Hz...................................................... 50
Figura 4.50 - Gráfico Deslocamento x Tempo. 0,25A - 4Hz. ....................................... 51
Figura 4.51 - Gráfico Força x Tempo. 0,50A - 4Hz...................................................... 51
Figura 4.52 - Gráfico Deslocamento x Tempo. 0,50A - 4Hz. ....................................... 52
11
xi
Figura 4.53 - Gráfico Força x Tempo. 0,75A - 4Hz...................................................... 52
Figura 4.54 - Gráfico Deslocamento x Tempo. 0,75A - 4Hz. ....................................... 53
Figura 4.55 - Gráfico Força x Tempo. 1A - 4Hz........................................................... 53
Figura 4.56 - Gráfico Deslocamento x Tempo. 1A - 4Hz. ............................................ 54
Figura 4.57 – Terceira bancada experimental. ............................................................ 54
Figura 4.58 - Gráfico Força x Tempo. 0A - 1Hz........................................................... 55
Figura 4.59 - Gráfico Deslocamento x Tempo. 0A - 1Hz. ........................................... 55
Figura 4.60 - Gráfico Força x Tempo. 0,25A - 1Hz...................................................... 56
Figura 4.61 - Gráfico Deslocamento x Tempo. 0,25A - 1Hz. ....................................... 56
Figura 4.62 - Gráfico Força x Tempo. 0,50A - 1Hz...................................................... 57
Figura 4.63 - Gráfico Deslocamento x Tempo. 0,50A - 1Hz. ....................................... 57
Figura 4.64 - Gráfico Força x Tempo. 0,75A - 1Hz...................................................... 57
Figura 4.65 - Gráfico Deslocamento x Tempo. 0,75A - 1Hz. ....................................... 58
Figura 4.66 - Gráfico Força x Tempo. 1A - 1Hz........................................................... 58
Figura 4.67 - Gráfico Deslocamento x Tempo. 1A - 1Hz. ............................................ 58
Figura 4.68 - Gráfico Força x Tempo. 0A - 2Hz........................................................... 59
Figura 4.69 - Gráfico Deslocamento x Tempo. 0A - 2Hz. ............................................ 59
Figura 4.70 - Gráfico Força x Tempo. 0,25A - 2Hz..................................................... 60
Figura 4.71 - Gráfico Deslocamento x Tempo. 0,25A - 2Hz. ....................................... 60
Figura 4.72 - Gráfico Força x Tempo. 0,50A - 2Hz..................................................... 60
Figura 4.73 - Gráfico Deslocamento x Tempo. 0,50A - 2Hz. ...................................... 61
Figura 4.74 - Gráfico Força x Tempo. 0,75A - 2Hz..................................................... 61
Figura 4.75 - Gráfico Deslocamento x Tempo. 0,75A - 2Hz. ...................................... 61
Figura 4.76 - Gráfico Força x Tempo. 1A - 2Hz.......................................................... 62
Figura 4.77 - Gráfico Deslocamento x Tempo. 1A - 2Hz. ............................................ 62
Figura 4.78 - Gráfico Força x Tempo. 0A - 3Hz.......................................................... 62
Figura 4.79 - Gráfico Deslocamento x Tempo. 0A - 3Hz. ........................................... 63
Figura 4.80 - Gráfico Força x Tempo. 0,25A - 3Hz..................................................... 63
Figura 4.81 - Gráfico Deslocamento x Tempo. 0,25A - 3Hz. ...................................... 64
Figura 4.82 - Gráfico Força x Tempo. 0,50A - 3Hz..................................................... 64
Figura 4.83 - Gráfico Deslocamento x Tempo. 0,50A - 3Hz. ...................................... 64
Figura 4.84 - Gráfico Força x Tempo. 0,75A - 3Hz..................................................... 65
Figura 4.85 - Gráfico Deslocamento x Tempo. 0,75A - 3Hz. ...................................... 65
Figura 4.86 - Gráfico Força x Tempo. 1A - 3Hz.......................................................... 65
Figura 4.87 - Gráfico Deslocamento x Tempo. 1A - 3Hz. ........................................... 66
Figura 4.88 - Gráfico Força x Tempo. 0A - 4Hz.......................................................... 66
Figura 4.89 - Gráfico Deslocamento x Tempo. 0A - 4Hz. ............................................ 66
12
xii
Figura 4.90 - Gráfico Força x Tempo. 0,25A - 4Hz..................................................... 67
Figura 4.91 - Gráfico Deslocamento x Tempo. 0,25A - 4Hz. ...................................... 67
Figura 4.92 - Gráfico Força x Tempo. 0,50A - 4Hz..................................................... 68
Figura 4.93 - Gráfico Deslocamento x Tempo. 0,50A - 4Hz. ...................................... 68
Figura 4.94 - Gráfico Força x Tempo. 0,75A - 4Hz..................................................... 68
Figura 4.95 - Gráfico Deslocamento x Tempo. 0,75A - 4Hz. ....................................... 69
Figura 4.96 - Gráfico Força x Tempo. 1A - 4Hz.......................................................... 69
Figura 4.97 - Gráfico Deslocamento x Tempo. 1A - 4Hz. ........................................... 69
Figura 5.1 – Esquema do experimento para a obtenção do parâmetro fo................... 71
Figura 5.2 – Esquema da montagem do potenciômetro rotativo. ................................ 72
Figura 5.3 – Detalhe da fixação do potenciômetro rotativo. ........................................ 72
Figura 5.4 – Calibração do potenciômetro. ................................................................. 73
Figura 5.5 - Segundo potenciômetro - altura do degrau: 0,1259mV. ........................... 73
Figura 5.6 - Primeiro potenciômetro - altura degrau: 0,044mV.................................... 74
Figura 5.7 – Gráfico Força x Deslocamento 0A........................................................... 75
Figura 5.8 – Gráfico Força x Deslocamento 0,25A...................................................... 75
Figura 5.9 – Gráfico Força x Deslocamento 0,50A...................................................... 75
Figura 5.10 – Gráfico Força x Deslocamento 0,75A.................................................... 76
Figura 5.11 – Gráfico Força x deslocamento 1A. ........................................................ 76
Figura 5.12 – Gráfico Força x Deslocamento.............................................................. 76
Figura 5.13 – Linearização parâmetro f0 0A. ............................................................... 77
Figura 5.14 – Linearização parâmetro f0 0,25A. .......................................................... 77
Figura 5.15 – Linearização parâmetro f0 0,50A. .......................................................... 78
Figura 5.16 – Linearização parâmetro f0 0,75A. .......................................................... 78
Figura 5.17 – Linearização parâmetro f0 1A. ............................................................... 78
Figura 5.18 – Experimento para determinação dos parâmetros fc e c0........................ 80
Figura 5.19– Gráfico Deslocamento x Tempo 52,00N 0A. V=0,001261m/s................. 81
Figura 5.20– Gráfico Deslocamento x Tempo 70,00N 0A. V=0,001431m/s................. 81
Figura 5.21– Gráfico Deslocamento x Tempo 104,50N 0A. V=0,001671m/s............... 81
Figura 5.22– Gráfico Deslocamento x Tempo 122,20N 0A. V=0,001825m/s............... 82
Figura 5.23– Gráfico Deslocamento x Tempo 52,00N 0,25A. V=0,000972m/s............ 82
Figura 5.24– Gráfico Deslocamento x Tempo 70,00N 0,25A. V=0,001180m/s............ 82
Figura 5.25– Gráfico Deslocamento x Tempo 104,50N 0,25A. V=0,001214m/s.......... 83
Figura 5.26– Gráfico Deslocamento x Tempo 122,20N 0,25A. V=0,001626m/s.......... 83
Figura 5.27– Gráfico Deslocamento x Tempo 52,00N 0,50A. V=0,000855m/s............ 83
Figura 5.28– Gráfico Deslocamento x Tempo 70,00N 0,50A. V=0,001015m/s............ 84
Figura 5.29– Gráfico Deslocamento x Tempo 104,50N 0,50A. V=0,001185m/s.......... 84
13
xiii
Figura 5.30– Gráfico Deslocamento x Tempo 122,20N 0,50A. V=0,001481 m/s......... 84
Figura 5.31– Gráfico Deslocamento x Tempo 52,00N 0,75A. V=0,000578m/s............ 85
Figura 5.32– Gráfico Deslocamento x Tempo 70,00N 0,75A. V=0,000789m/s............ 85
Figura 5.33– Gráfico Deslocamento x Tempo 104,50N 0,75A. V=0,000953m/s.......... 85
Figura 5.34– Gráfico Deslocamento x Tempo 122,20N 0,75A. V=0,001256m/s.......... 86
Figura 5.35– Gráfico Deslocamento x Tempo 52,00N 1A. V=0,000509m/s................. 86
Figura 5.36– Gráfico Deslocamento x Tempo 70,00N 1A. V=0,000698m/s................. 86
Figura 5.37– Gráfico Deslocamento x Tempo 104,50N 1A. V=0,000846m/s............... 87
Figura 5.38 - Gráfico Deslocamento x Tempo 122,20N 1A. V=0,001131m/s. ............. 87
Figura 5.39 – Gráfico do parâmetro f0 por deslocamento. ........................................... 90
Figura 5.40 – Gráfico do parâmetro fC por deslocamento............................................ 90
Figura 5.41 – Gráfico do parâmetro c0 por deslocamento. .......................................... 90
Figura 5.42 - Gráfico da velocidade por força. ............................................................ 91
Figura 6.1 – Modelo da configuração experimental 2.................................................. 92
Figura 6.2 – Modelo da configuração experimental 3.................................................. 93
Figura 6.3- Interface de modelagem e programação do UM. ...................................... 93
Figura 6.4 - Interface de simulação do UM. ................................................................ 94
Figura 6.5 - Gráfico simulação x experimento config. 2 – 0,25A 1Hz E=16,18%. ....... 94
Figura 6.6 – Gráfico simulação x experimento config. 2 – 0,75A 1Hz E=4,34%. ........ 95
Figura 6.7 – Gráfico simulação x experimento config. 2 – 0,25A 3Hz E=4,82%. ........ 95
Figura 6.8 – Gráfico simulação x experimento config. 2 – 0,75A 3Hz E=16,60%. ...... 95
Figura 6.9 – Gráfico simulação x experimento config. 3 – 0,25A 1Hz E=5,46%. ........ 96
Figura 6.10 – Gráfico simulação x experimento config. 3 – 0,75A 1Hz E=9,09%. ...... 96
Figura 6.11 – Gráfico simulação x experimento config. 3 – 0,25A 3Hz E=9,17%. ...... 96
Figura 6.12 – Gráfico simulação x experimento config. 3 – 0,75A 3Hz E=5,26%. ...... 97
14
xiv
ÍNDICE DE TABELAS
Tabela 4.1 – Especificação do amortecedor MR RD 1005-3....................................... 24
Tabela 4.2 – Especificação do atuador hidráulico. ...................................................... 25
Tabela 4.3 - Especificação da célula de carga. ........................................................... 25
Tabela 4.4 - Especificação do potenciômetro.............................................................. 26
Tabela 4.5 - Especificação da válvula proporcional hidráulica. ................................... 26
Tabela 4.6 - Especificação da placa de aquisição de dados. ...................................... 26
Tabela 4.7 – Especificação do atuador pneumático. ................................................... 37
Tabela 4.8 - Especificação da válvula direcional pneumática...................................... 37
Tabela 4.9 - Especificação do acelerômetro. .............................................................. 37
Tabela 5.1 – Valores de f0 0A. .................................................................................... 79
Tabela 5.2 – Valores de f0 0,25A. ............................................................................... 79
Tabela 5.3 – Valores de f0 0,50A. ............................................................................... 79
Tabela 5.4 – Valores de f0 0,75A. ............................................................................... 79
Tabela 5.5 – Valores de f0 1A. .................................................................................... 79
Tabela 5.6 - Valores dos parâmetros obtidos para o amortecedor MR RD 1005-3. .... 89
xv
1 INTRODUÇÃO
Os fluidos controláveis, também denominados inteligentes, são os sensíveis ou
adaptáveis a alterações nas condições operacionais e ambientais, que visam manter o
comportamento requerido do sistema.
Os fluidos controláveis apresentam uma ou mais propriedades mecânicas que,
devido à influência da variação de alguma grandeza física à qual estejam submetidos,
como temperatura, campo elétrico, pressão, campo magnético, entre outras, sofrem
alterações reversíveis (Yang et. al., 2002).
Entre os fluidos controláveis os empregados em dispositivos de controle são:
os fluidos magneto-reológicos e os fluidos eletro-reológicos. Os materiais inteligentes
mais utilizados são: os piezolétricos, os eletro-estrictivos e os com memória de forma
(Steffen et. al., 2004, Pons, 2005, e Banks et. al., 1996).
Os fluidos eletro-reológicos (ERs) são dispersões coloidais de partículas
sólidas em um meio fluido isolante, sendo as dimensões das partículas sólidas muito
superiores às dimensões características das partículas do solvente (Ghandi, 1992).
Quando submetidos a um campo elétrico, apresentam alterações em suas
propriedades reológicas (viscosidade). Essas alterações permanecem até que seja
aplicada uma tensão de escoamento maior que a tensão de cisalhamento do fluido ou
então com a retirada do campo elétrico externo (Ghandi, 1992). A principal aplicação
de fluidos eletro-reológicos está voltada para o desenvolvimento de transmissão e
suspensão veicular (Yang, 2001).
Na Figura 1.1a é ilustrado um esquema de um amortecedor eletro-reológico
que fornece um controle de vibrações em suspensões automotivas e na Fig. 1.1b uma
embreagem eletro-reológica.
Figura 1.1 - Aplicação eletro-reológica.(Yang, 2001).
1
No amortecedor, varia-se o fluxo do fluido eletro-reológico amortecendo assim
o choque. Já na embreagem, a variação de voltagem permite o acoplamento entre os
dois discos (Yang, 2001).
Os fluidos magneto–reológicos (MRs) existem há aproximadamente vinte anos
(Yao,
1999),
sendo
amortecimento em
empregados
assentos
em
suspensões
de veículos
pesados
automotivas
(Fig.
(Fig.
1.3), sistemas
1.2),
de
amortecimento sísmicos (Fig. 1.4 e 1.5), próteses inteligentes, (Fig. 1.6) e sistemas de
realimentação tátil (Fig. 1.7).
Figura 1.2 - Suspensão automotiva MR do Cadillac Seville. (Lauwerys et. al., 2002).
Figura 1.3 - Amortecimento em assentos de veículos pesados (Lord CO.).
Figura 1.4 - Sistemas de amortecimento sísmicos (Ok, 2007 e Lord CO.).
2
Figura 1.5 – Ponte Pênsil, China. Um par de amortecedores MR foi colocado em cada um dos
cabos de aço de sustentação (Ko et. al., 2003)
Figura 1.6 - Prótese inteligente (Carlson, 2001 e Lord Co.).
Figura 1.7 - Sistemas de realimentação tátil (Cunha-Cruz et. al., 2003 e Lord CO.).
Os fluidos magneto-reológicos (MRs) são fluidos que apresentam uma
alteração reversível em suas propriedades reológicas: viscosidade, elasticidade e
plasticidade, quando expostos a um campo magnético. Na presença de um campo
magnético, o fluido MR varia sua reologia em função da intensidade desse campo. No
3
entanto o fluido se comporta como um fluido Newtoniano comum na ausência de
campo magnético.
Os fluidos MR são constituídos de partículas magneticamente polarizadas
(óxido de ferro), suspensas em um fluido, como óleo mineral, óleo sintético ou silicone.
Apesar dos fluidos ER terem chamado mais atenção dos pesquisadores nas
décadas de 50 até 80, os fluidos MR, por serem superiores em vários aspectos
atualmente são os mais utilizados. Abaixo são listadas quatro desvantagens dos
fluidos ER segundo Carrera (2008):
▪ requerem tensões acima de 1kV, que exigem fontes de alta tensão
relativamente caras, maiores cuidados com isolação e apresentam maiores riscos,
principalmente em veículos onde circuitos de alta tensão teriam que compartilhar
espaço com dutos de combustível, no caso de aplicação em suspensão automotiva;
▪ os dispositivos que utilizam fluidos ERs apresentam um alcance dinâmico em
média dez vezes menor que os fluidos MRs, o que resulta em dispositivos menos
eficientes. De acordo com Genç (2002), esta diferença ocorre devido as tensões de
escoamento do fluido MR alcançarem valores mais elevados, o que está relacionado
2
ao fato da densidade de energia magnetostática, µ 0 H 0 , nos fluidos MRs ser maior
2
que a densidade de energia eletrostática, ε 0 E 0 , nos fluidos ERs;
▪ são altamente susceptíveis a contaminantes externos (por exemplo umidade),
devido seu comportamento reológico depender em última instância do movimento dos
íons ou cargas elétricas, facilmente afetados; e
▪ só podem operar em uma faixa estreita de temperatura, pois sua viscocidade
apresenta grande influência da temperatura. Por outro lado, os fluidos MRs
apresentam estabilidade relativa entre -40 e 150 ºC, portanto, o que os torna mais
adequados a aplicações como amortecedores de automóveis que operam com uma
variação térmica.
1.1
Objetivo
O objetivo deste trabalho é o estudo do amortecedor magneto-reológico (MR)
que consiste basicamente em um amortecedor, cujo fluido de trabalho apresenta uma
resistência ao cisalhamento que varia de acordo com o campo magnético aplicado
sobre o mesmo (conhecido como fluido magneto-reológico), permitindo, assim, que,
através da aplicação de um campo magnético controlado, se possa controlar o
amortecimento do dispositivo.
4
Como sua formulação matemática depende de parâmetros, este estudo é
composto por uma modelagem experimental, capaz de obter os parâmetros
necessários para compor o modelo matemático adotado.
Para testar a modelagem matemática obtida, é apresentada uma simulação
que compara o modelo matemático com os resultados obtidos através do
comportamento experimental do amortecedor MR.
1.2
Motivação
A motivação surgiu com a aquisição de um amortecedor MR pelo Laboratório
de Robótica tendo em vista que pesquisas nessa área demandam avaliação
experimental, o que se torna inviável sem este equipamento. Além disso, o fato de se
trabalhar com uma tecnologia que permita um trabalho não só teórico, mas também
experimental, contribuiu para a escolha desse tema.
1.3
Grau de Inovação
A modelagem matemática dos amortecedores MRs é baseada em quatro
modelos distintos: o Modelo de Bingham, o Modelo de Gamota e Filisko, o Modelo de
Bouc-Wen, e o Modelo de Bouc-Wen Modificado. Cada uma dessas modelagens é
composta por parâmetros cujos valores obtidos experimentalmente representam o
comportamento do amortecedor.
Através da revisão bibliografia, observa-se que trabalhos de pesquisa na área
costumam se utilizar de valores já encontrados por outros autores ou ainda, não
descrevem de maneira clara como conseguem obter tais valores
Assim, este trabalho apresenta modelagens experimentais específicas para a
obtenção de cada parâmetro necessário para compor a equação matemática do
modelo de Bingham. Procedimento ainda não observado nos trabalhos nesta área.
No trabalho, o amortecedor também é ensaiado com diversos valores de
freqüência de excitação, fato inovador, pois os pesquisadores se limitam a usar
apenas uma determinada freqüência.
Observa-se que os pesquisadores não se preocupam com o comportamento do
amortecedor em diferentes valores de freqüência.
1.4
Estado da Técnica
5
Em Stutz (2005), a pesquisa utiliza uma bancada experimental com o propósito
de encontrar os parâmetros matemáticos para o equacionamento usando os modelos
teóricos encontrados na literatura, como o de Bouc-Wen e Bouc-Wen modificado. O
amortecedor MR é utilizado para absorção de vibrações em estruturas de engenharia
civil, onde o autor apenas trabalha com um único valor da freqüência de excitação do
seu experimento, não explorando assim diversas outras freqüências para observar o
comportamento do amortecedor empregado. Além disso emprega uma montagem
experimental com excitador mecânico (shaker) em vez de um atuador hidráulico.
No trabalho de Spencer et. al. (1996), novamente o objetivo da pesquisa é o
emprego do amortecedor MR em controle de vibrações em estruturas de concreto.
Nesse estudo também é utilizada uma única freqüência de excitação do ensaio
experimental, mas o experimento utiliza uma bancada com o uso de um atuador
hidráulico em vez de um excitador mecânico. Novamente é observada a utilização da
modelagem matemática encontrada na literatura para aplicação dos parâmetros
experimentais. Essa modelagem matemática citada será apresentada no capítulo 3.
Em Lai e Liao (2001), os autores têm como objetivo a aplicação em um sistema
de suspensão automotiva, onde se utilizam de uma montagem experimental com
freqüência única de excitação e com este propósito usam um excitador mecânico.
Novamente é observado o emprego da modelagem matemática já conhecida entre os
estudos nessa área.
No trabalho de Yao et. al. (2001), os autores elaboram o seu estudo para uma
aplicação em um sistema de suspensão veicular, onde a metodologia foi semelhante a
empregada em Lai e Liao (2001), com a diferença que foi utilizado uma freqüência de
excitação de 1Hz onde nos trabalhos analisados esse valor foi sempre de 2Hz.
Pode-se observar que os pesquisadores apenas trabalham com valores de
tensão de 0 a 2V, não observando assim o comportamento do amortecedor MR com
outros valores de tensão. Este fato, ocorre pois apesar da caixa de controle que
acompanha o amortecedor fornecer uma tensão de saída, o controle do campo
magnético se dá através de valores de corrente até 1A. Logo os valores de tensão na
saída da caixa de controle são proporcionais aos valores de corrente necessários para
o controle do amortecedor.
Muitos autores não montam bancadas para a modelagem experimental do
amortecedor MR em questão. Eles referenciam trabalhos que já fizeram essa
modelagem experimental e aproveitam os dados já publicados na sua modelagem
teórica, como pode se observar em: Tusset (2008), Medina (2008), Deivys (2003),
Carlson et. al. (2001), Villarreal (2005), Cho et. al. (2005), entre outros. O grande
inconveniente de se extrair o comportamento fenomenológico de outros trabalhos está
6
em se encontrar um pesquisador que trabalhe com o mesmo modelo de amortecedor
que se esteja trabalhando, já que se pode concluir que o comportamento experimental
é único para cada tipo de amortecedor MR. Logo a construção de uma bancada
experimental permite ensaiar vários tipos de amortecedores MR que se resolva
pesquisar.
No trabalho de Bombard et. al. (2000), é ensaiado um amortecedor MR cujo
fluido MR foi formulado no Brasil. O ensaio é realizado em uma máquina universal de
ensaios mecânicos, onde a conclusão dos autores é que o fluido formulado apresenta
comportamento reológico podendo vir a ser empregado em amortecedores, porém
descobrem que o seu protótipo utiliza mais energia do que o fluido comercial,
provavelmente
devido
a
sua
menor
magnetização,
logo
precisando
de
aprimoramentos. A desvantagem em se utilizar uma máquina universal de ensaios
mecânicos é não se poder aplicar uma excitação senoidal no dispositivo magnetoreológico. Este tipo de máquina pode ser empregada na validação do fluido, mas não
no amortecedor.
Em Viota et. al. (2007), os pesquisadores também estudam a formulação de
um fluido magneto-reológico, fazendo uma abordagem semelhante a Bombard et. al.
(2000). Os trabalhos de formulação de fluidos reológicos são de grande importância,
pois atualmente poucas empresas detem essa tecnologia a nível mundial. Pode-se
observar que existe mais pesquisas relacionadas aos amortecedores do que a
formulação do fluido magneto-reológico.
Existem poucos trabalhos cuja aplicação do amortecedor MR seja em próteses
transfemorais, mas podemos destacar os de Joshi e Anand (2005), Buckley et. al.
(2007), Kim e Oh (2001). No estudo de Kim e Oh (2001), é utlizado em vez de um
amortecedor MR convencional, um dispositivo magneto-reológico de rotação,
projetado pelos pesquisadores. Porém, por não se tratar de um dispositivo comercial,
torna-se mais caro, além de ser muito pesado para utilização em prótese, segundo os
autores.
Através da revisão bibliográfica pode-se concluir que a freqüência de excitação
utilizada é sempre 2 Hz, apesar de se encontrar um trabalho que utiliza 1 Hz. Pode-se
concluir que a análise fenomenológica do amortecedor MR em várias freqüências de
excitação é mais interessante para se avaliar o seu comportamento em diversas
circunstâncias de funcionamento e aplicação a qual ele pode ser submetido. Por isso
neste trabalho são utilizados vários valores de freqüência de excitação.
Em quase todas as pesquisas aqui apresentadas é utilizado um excitador
mecânico na bancada experimental, porém optou-se em trabalhar com um atuador
7
hidráulico e um pneumático, devido a sua disponibilidade no laboratório, e devido o
excitador mecânico disponível não atender a necessidade do ensaio experimental.
Pode-se observar que os resultados experimentais não são influenciados pelo
tipo de excitador mecânico utilizado.
1.5
Apresentação da tese
No primeiro capítulo, são abordados a introdução, o objetivo, a motivação, o
grau de inovação e o estado da técnica. No capítulo 2 são apresentados os
dispositivos de controle de vibrações, a saber: passivo, ativo e semi-ativo. No capítulo
3, são estudados os fluidos magneto-reológicos, apresentando o amortecedor MR e
seus modelos matemáticos. No capitulo 4 é abordado a modelagem experimental
através das configurações e dos resultados obtidos. A formulação do amortecedor é
apresentada no capítulo 5. No capítulo 6 são mostrados a simulação e os resultados.
A conclusão e trabalhos futuros estão presentes no capítulo 7.
8
2 DISPOSITIVOS DE CONTROLE DE VIBRAÇÕES
Os dispositivos de controle de vibrações são divididos em três grupos, de
acordo com o modo de atuação: controle passivo, ativo e semi-ativo. Dentre as
aplicações destes dispositivos pode-se destacar a atenuação de ruídos, o
amortecimento de vibração e os sistemas de suspensão.
2.1
Dispositivo de Controle de Vibrações Passivo
O dispositivo de controle de vibrações passivo é o mais antigo e simples
dispositivo de controle. Ele não necessita de fonte externa de energia para atuar sobre
o sistema a ser controlado. Este dispositivo atua no sistema através da aplicação de
forças realizadas em resposta ao movimento sofrido por ele, ou seja, através do
armazenamento ou dissipação da energia do sistema.
A energia controlada passivamente em um sistema não pode ser variada pela
ação do dispositivo. No entanto, este dispositivo depende do projeto inicial do sistema,
ou seja, sua faixa de operação é restrita aquela para a qual as propriedades como
elasticidade, rigidez e amortecimento, foram definidas sem permitir mudanças em
tempo real.
Suas principais vantagens são: a simplicidade, os baixos custos de
implementação e manutenção, a estabilidade e a confiabilidade, por agir sobre o
sistema em qualquer situação, uma vez que não depende de uma fonte externa de
energia. Porém, atua em uma faixa bastante restrita de freqüências, não se adaptando
a diferentes condições de operação.
Os dispositivos de controle passivo são compostos por elementos como coxins,
molas, amortecedores e freios cujas propriedades são constantes.
Uma aplicação bem usual deste tipo de dispositivo é o sistema passivo de
suspensão automotiva, onde os elementos passivos utilizados compreendem os
amortecedores e as molas helicoidais ou de feixe. A grande desvantagem desta classe
de dispositivos de controle de vibrações reside na sua incapacidade de adaptação,
uma vez que suas propriedades são fixas.
9
2.2
Dispositivo de Controle de Vibrações Ativo
Além da capacidade de armazenar ou dissipar energia como no dispositivo
passivo, o dispositivo de controle ativo possui a capacidade de injetar energia no
sistema que se deseja controlar. Logo, ele precisa de uma fonte de energia externa
que forneça energia aos seus atuadores, permitindo que estes exerçam ações de
controle sobre o sistema. Estas forças de controle podem ser usadas para reduzir a
energia injetada no sistema por meio de excitação externa, ou ainda, pode ser usada
para dissipar a energia do sistema controlado.
Este dispositivo funciona a partir dos valores medidos de vibração no sistema,
por isso além da fonte externa de energia, necessita também de sensores e
atuadores.
Apesar de possuir desempenho superior, quando comparado ao dispositivo
passivo, o ativo apresenta alta complexidade, elevada demanda de energia externa,
altos custos de implementação e manutenção e, ainda, uma menor confiabilidade por
ser dependente de uma fonte externa de energia para atuar sobre o sistema.
Os atuadores hidráulicos, pneumáticos e eletromagnéticos, são exemplos de
dispositivos de controle ativo.
A sua principal diferença do dispositivo de controle passivo é o fato de precisar
de uma potência externa para iniciar uma ação de controle, porém esta característica
torna este sistema vulnerável à falta de energia.
O dispositivo de controle ativo difere do sistema passivo, em relação a
adaptabilidade às condições do sistema, ou seja, apresenta um bom desempenho em
uma maior faixa de freqüência.
2.3
Dispositivo de Controle de Vibrações Semi-ativo
O dispositivo de controle semi-ativo compreende uma classe intermediária
entre os dois tipos apresentados anteriormente. Ele apresenta tanto características do
dispositivo passivo como do ativo.
Neste tipo, a força de controle é gerada de forma passiva através da dissipação
ou armazenamento da energia do sistema, assim como no dispositivo passivo. Porém,
permite que a intensidade desta força seja controlada de maneira ativa por um sinal de
controle.
Em um amortecedor semi-ativo, a intensidade da força gerada por ele pode ser
controlada, basicamente, ajustando suas propriedades mecânicas em tempo real.
10
Este dispositivo não injeta energia no sistema, ele simplesmente a dissipa de
forma controlada, o que lhe confere estabilidade. Sua principal característica é a baixa
necessidade de energia de atuação, desta forma, obtém-se um dispositivo de controle
capaz de atuar em uma faixa de operação muito mais ampla que a do sistema passivo
e a um custo energético muito menor que aquele apresentado pelo dispositivo de
controle ativo.
Outra característica importante é a confiabilidade do sistema, pois na falta de
energia, o dispositivo de controle atua como um dispositivo passivo. No que diz
respeito ao dispositivo de controle ativo, é apresentada a mesma estabilidade, mas
com um menor consumo de energia e, além disso, caso seu sistema de controle falhe,
ele se comporta como um sistema passivo.
Em um amortecedor semi-ativo, por exemplo, a intensidade da força por ele
gerada pode ser controlada alterando-se a viscosidade do fluido do amortecedor ou a
abertura da válvula por onde passa este fluido. A viscosidade do fluido do amortecedor
pode ser alterada através da exposição do mesmo a um campo magnético controlado.
Um amortecedor semi-ativo com este princípio de funcionamento é denominado de
magneto-reológico (Spencer et. al., 1996 e Sunakoda et. al., 2000), e será objeto de
estudo neste trabalho.
Os cilindros hidráulicos e pneumáticos com válvula de vazão controlável,
sistema de frenagem controlável, sistema de rigidez variável, amortecedores de
vibração
semi-ativos,
amortecedores
de
fluidos
controláveis
elétrica
ou
magneticamente são exemplos de dispositivo de controle semi-ativo.
O dispositivo de controle semi-ativo apresenta um grande potencial para a
aplicação prática e vem, recentemente, atraindo a atenção da comunidade científica.
11
3 AMORTECEDORES MAGNETO-REOLÓGICOS
Os fluidos magneto-reológicos quando expostos a um campo magnético,
mostram que suas partículas apresentam um momento de dipolo paralelo à direção
das linhas de fluxo do campo magnético. Desta forma, as partículas, anteriormente
dispersas, se alinham ao longo das linhas de fluxo do campo magnético, formando
uma estrutura em forma de correntes, conforme é mostrado nos esquemas das Figs
3.1 e 3.2.
Figura 3.1 - Fluido MR na ausência de um campo magnético (Stutz, 2005).
.
Figura 3.2 - Fluido MR na presença de um campo magnético (Stutz, 2005).
Cada corrente de partículas formada ao longo de uma linha de fluxo apresenta
uma resistência para sair desta configuração e o nível de resistência apresentado é
proporcional à intensidade do campo magnético a que o fluido é exposto.
O grau de mudança do fluido é proporcional à magnitude do campo magnético
aplicado. Transições podem surgir como uma grande mudança na viscosidade efetiva
do fluído e ocorrer em menos de poucos milisegundos.
O modelo de visco-plasticidade de Bingham (Shames et. al., 1992) é utilizado
para se descrever o comportamento dos fluidos MRs em função da intensidade do
campo magnético.
12
Neste modelo, o fluido se comporta como um sólido até que a tensão
cisalhante de escoamento τ 0 seja excedida e o fluido passa a exibir uma relação
linear entre a tensão
τ e a taxa de deformação γ& de cisalhamento, como pode ser
observado na Eq. 3.1.
τ = τ o (H ) sgn(γ& ) + ηγ&
(3.1)
onde sgn é a função sinal e η é a viscosidade plástica, definida como a viscosidade
apresentada pelo fluido, após a ocorrência do escoamento. Para descrever a
capacidade do fluido MR alterar suas propriedades reológicas, quando exposto a um
campo magnético, a tensão de escoamento τ 0 é considerada como uma função da
intensidade H do campo magnético.
Na ausência de um campo magnético, H = 0, o modelo de Bingham se reduz
ao modelo de visco-elasticidade de Newton e o fluido MR se comporta como um fluido
Newtoniano comum. Na Figura 3.3, é apresentada uma interpretação gráfica do
modelo de Bingham.
Figura 3.3 - Modelo de visco-plasticidade de Bingham (Shames et. al., 1992).
O fluido possui três modos distintos de aplicação que são: o modo de válvula
(valve mode), o modo de cisalhamento (shear model) e o modo de esmagamento
(squeeze model).
O modo de válvula representa o modo de operação mais comum de um fluido
MR. Neste modo, os pólos ou placas magnéticas são fixas, diferentemente dos outros
dois modos de operação, e funcionam como válvulas. O fluido MR, confinado entre as
duas placas fixas, é, então, pressurizado de modo a fluir entre os pólos. Com a
exposição do fluido a um campo magnético, as estruturas de corrente originadas
formam uma barreira ao fluxo do fluido.
13
Portanto, como conseqüência do aumento da intensidade do campo magnético,
aumenta-se a resistência ao fluxo do fluido, com isso, conclui-se que a vazão do fluido
é função da intensidade do campo magnético aplicado.
O modo de válvula é esquematizado na Fig. 3.4 e é aplicado, geralmente, em:
servo-válvulas hidráulicas, amortecedores e atuadores (Lord, 2007).
Figura 3.4 - Modo de válvula (Carlson, 2000).
No modo de cisalhamento, o movimento relativo entre os pólos (ou placas)
magnéticos objetiva o cisalhamento de uma fina camada de fluido MR. O cisalhamento
do fluido, por sua vez, tende a mover as estruturas de correntes em relação às linhas
de fluxo do campo, que são ortogonais aos pólos (ou placas) magnéticos. Portanto, a
resistência do fluido ao cisalhamento é aumentada com o aumento da intensidade do
campo magnético.
Basicamente, este modo é parecido como o modo de válvula apresentado
anteriormente, com a diferença de uma das placas estar sujeita a um deslocamento
relativo, mantendo-se a distância entre elas constante.
Entre outras aplicações, fluidos MRs no modo de cisalhamento são utilizados
em freios rotatórios e em amortecedores MR que operam com baixos níveis de força.
Este tipo é observado na Fig. 3.5.
Figura 3.5 - Modo de cisalhamento (Carlson, 2000).
As aplicações mais usuais deste tipo são em embreagens, freios,
amortecedores e compósitos estruturais (Lord, 2007).
14
No modo de esmagamento, uma fina camada de fluido MR é comprimida por
pólos magnéticos móveis. Quando expostas a um campo magnético, as partículas do
fluido formam uma estrutura de corrente paralela nas linhas de fluxo do campo
magnético. Com uma força de compressão (força aplicada perpendicularmente)
aplicada nos pólos, as estruturas de corrente formadas pelas partículas tendem a se
desmanchar.
A capacidade destas estruturas resistirem à deflexão é determinada pela
intensidade do campo magnético a que o fluido é exposto. Ou seja, com o aumento da
intensidade do campo magnético, aumenta-se à resistência à deflexão e,
conseqüentemente, a resistência ao movimento relativo entre os pólos.
O fluido confinado entre as placas é obrigado a fluir horizontalmente no espaço
entre as placas.
Este modo é mostrado na Fig. 3.6 e pode ser aplicado para controle de
pequenos movimentos (Lord, 2007)
Figura 3.6 - Modo de esmagamento (Carlson, 2000).
3.1
Amortecedores Magneto-reológicos
A
aplicação
mais
comum
dos
fluidos
magneto-reológicos
são
nos
amortecedores. A sua capacidade de alterar de maneira reversível a sua viscosidade
fazem com que tenham uma grande potencialidade em aplicações de controle de
vibrações.
O esquema de um amortecedor magneto-reológico típico é apresentado na Fig.
3.7.
15
Figura 3.7 - Esquema do amortecedor magneto-reológico (Carlson, 2000).
O cilindro principal do amortecedor contém o pistão, o circuito magnético
(bobina), um acumulador e o fluido magneto-reológico. O fato do amortecedor ser
magneto-reológico, o diferencia do amortecedor convencional pela presença da bobina
em sua válvula, que tem por finalidade gerar o campo magnético que vai alterar as
propriedades reológicas do fluido.
O acumulador consiste de uma câmara contendo gás pressurizado, geralmente
nitrogênio, e tem como finalidade prevenir a cavitação do fluido, compensar o volume
de fluido deslocado pelo eixo do pistão, assim como uma expansão térmica do fluido.
De um ponto de vista fenomenológico, o acumulador age como uma mola no
amortecedor (Stutz, 2005). No amortecedor magneto-reológico, o fluido opera no
modo de válvula, conforme pode ser observado na Fig. 3.4.
O funcionamento do amortecedor basicamente é dado pelo movimento do
pistão, onde o fluido magneto-reológico flui através da válvula do amortecedor de uma
câmara a outra. Uma vez que um campo magnético é gerado perpendicular à válvula
do amortecedor, criando uma região de ativação, as partículas magneticamente
polarizadas do fluido apresentam um momento de dipolo paralelo na direção das
linhas de fluxo do campo magnético. Desta forma, as partículas, anteriormente
dispersas, se alinham ao longo das linhas de fluxo do campo magnético, formando
uma estrutura de correntes, conforme esquematizado na Fig. 3.2, que age como uma
barreira ao fluxo do fluido. Aumentando-se a intensidade do campo magnético,
aumenta-se a resistência ao fluxo do fluido através da válvula, resultando na força do
amortecedor MR (Carlson, 2000).
Em um amortecedor magneto-reológico, a força é gerada de maneira passiva,
sendo capaz apenas de dissipar energia do sistema ao qual ele esteja associado. No
entanto, apesar de a força ser gerada de maneira passiva, sua intensidade pode ser
controlada de maneira ativa, através da exposição do fluido MR a um campo
magnético controlado. Por este motivo, os amortecedores magneto-reológico
pertencem à classe dos atuadores semi-ativos.
16
Deve-se ressaltar que a energia demandada por um amortecedor magnetoreológico é relativamente baixa, quando comparada à energia demandada por um
atuador ativo. Isto se deve ao fato da energia servir apenas para gerar o campo
magnético apropriado para controlar a intensidade da força. Esta é uma característica
importante para a aplicação em próteses, devido a qualquer sistema de controle que
seja incorporado a uma prótese necessitar ser leve e de tamanho reduzido.
3.2
Modelos Matemáticos do Amortecedor MR
Tanto os modelos não paramétricos, (Burton et. al., 1996, Ehrgott e Masri,
1992), quanto os paramétricos, (Gamota e Filisko, 1991, Spencer et. al., 1996, Kamath
e Wereley, 1997, Stanway et. al., 1987), foram considerados para modelar o
comportamento observado de amortecedores magneto e eletro-reológicos.
Ehrgott e Masri, 1994, apresentaram uma abordagem não paramétrica para
modelar os amortecedores ERs (Eletro-reológicos), presumindo que a força do
amortecedor poderia ser escrita em função da velocidade e aceleração por polinômios
de Chebychev. McClamroch e Gavin, 1995, seguiram um método similar, ao modelar
um dispositivo ER. Uma das dificuldades nessa abordagem é que os modelos
resultantes são, muitas vezes, muito complexos. Kamath e Wereley (1996) e Makris et.
al., (1996), desenvolveram modelos paramétricos para caracterizar fluidos ERs (Eletroreológicos) e os dispositivos fluidos controláveis. Alternativamente, os modelos
paramétricos, baseados em simples idealizações mecânicas foram considerados por
(Stanway et. al., 1985, 1987, e Gamota e Filisko, 1991), para descrever o
comportamento de fluídos controláveis e dos amortecedores fluidos controláveis.
Os
modelos
paramétricos
são
modelos
fenomenológicos
geralmente
construídos a partir da combinação de elementos mecânicos simples, como, por
exemplo, molas, amortecedores e elementos de atrito. Nestes modelos, os parâmetros
são ajustados de modo que se consiga reproduzir de maneira satisfatória os
resultados observados experimentalmente.
Existem duas abordagens distintas para o problema da modelagem
matemática. Uma é a modelagem do fluido magneto-reológico e a outra é a
modelagem do amortecedor magneto-reológico, levando-se em consideração que o
modelo do amortecedor é um modelo fenomenológico, ou seja, é obtido através da
observação experimental do comportamento de um sistema mecânico composto por
um amortecedor cuja vazão em seu orifício é controlada através do campo magnético.
17
A seguir, são descritos os modelos paramétricos bastante encontrados na
literatura.
3.2.1 Modelo de Bingham
O comportamento da tensão de deformação do modelo visco-plástico de
Bingham (Shames e Cozarelli, 1992) é, freqüentemente, usado para descrever o
comportamento dos fluidos MR. Neste modelo, a viscosidade plástica é definida como
a rampa da medida dos dados da tensão de cisalhamento versus a taxa da
deformação
por
cisalhamento.
Assim,
para
valores
positivos
da
taxa
de
cisalhamento, γ& , a tensão total é dada pela Eq. 3.2.
τ = τ y (campo) + ηγ&
onde
(3.2)
τ y (campo) é a tensão de cisalhamento limite induzida pelo campo magnético e η
é a viscosidade plástica do fluido.
Com base neste modelo do comportamento reológico dos fluidos MR, Stanway,
et. al. (1985) propuseram um modelo mecânico idealizado, chamado de modelo de
Bingham, para o comportamento do amortecedor MR. O modelo de Bingham consiste
em um elemento de atrito de Coulomb colocado em paralelo com o amortecedor
viscoso, como mostrado na Fig. 3.8.
Figura 3.8 - Modelo de Bingham (Spencer, et. al., 1996).
Neste modelo, para velocidades do pistão diferentes de zero, x& , a força gerada
pelo mecanismo é dado pela Eq. 3.3:
F = f c sgn( x& ) + c 0 x& + f 0
(3.3)
18
onde x& é a velocidade relativa das extremidades do amortecedor, sgn( ) é a função
sinal, c0 é a constante de amortecimento plástico, ou seja, é o coeficiente de
amortecimento observada após o escoamento do fluido e f c é a força relacionada à
tensão de escoamento do fluido.
Uma parcela de força, f 0 , é incluída para os valores de força medidos devido à
presença do acumulador no interior do amortecedor. Com base na Eq. 3.3, podemos
concluir que, se em algum ponto, a velocidade do pistão for igual a zero, a força
gerada pelo mecanismo, F , é igual a força interna do acumulador, f 0 (offset).
Devido a sua simplicidade relativa, o modelo de Bingham é muito utilizado no
desenvolvimento de amortecedores MR (Yang, 2001, Poynor, 2001) por fornecer um
entendimento da influência dos parâmetros geométricos do amortecedor em seu
desempenho. O modelo de Bingham é utilizado na análise numérica de um isolador
semi-ativo de vibrações (Johnson et. al., 1998).
Na Equação 3.3, observa-se que a força determinada pelo modelo de Bingham
é descontínua com relação à velocidade, devido à função sinal não ser definida nos
pontos de velocidade nula.
3.2.2 Modelo de Gamota e Filisko
Gamota e Filisko (1991), propuseram uma extensão do modelo de Bingham, o
qual consiste no elemento de atrito em paralelo com o amortecedor de fluido em série
com um modelo padrão de sólido linear (Shames e Cozzarelli, 1992), como é
mostrado na Fig. 3.9.
Figura 3.9 - Modelo proposto por Gamota e Filisko, 1991 (Dyke et. al. 1996).
As equações que governam este modelo estão descritas nas Eqs. 3.4 e 3.5.
19
F = k1 ( x 2 − x1 ) + c1 ( x& 2 − x&1 ) + f 0
= c 0 x&1 + f c sgn( x&1 ) + f 0
F > fc
(3.4)
= k 2 ( x3 − x 2 ) + f 0
F = k1 ( x 2 − x1 ) + c1 x& 2 + f 0
= k 2 ( x3 − x 2 ) + f 0
F ≤ fc
(3.5)
onde c0 é o coeficiente de amortecimento associado ao modelo de Bingham e k1, k2 e
c1 estão associados com o material sólido linear. Quando F ≤ f c x&1 = 0.
Segundo Ehrgott e Masri (1994), as Eqs. 3.4 e 3.5 são extremamente
complexas, tornando este modelo mais difícil para se aproximar com a parte numérica.
3.2.3 Modelo de Bouc-Wen
Um modelo que é numericamente tratável e tem sido usado freqüentemente
para modelar sistemas com histerese é o modelo de Bouc-Wen (Wen, 1976).
O modelo de Bouc-Wen é extremamente versátil e pode exibir uma grande
variedade de comportamento de histerese.
Um esquema deste modelo é mostrado na Fig. 3.10, onde é formado pela
combinação em paralelo de um elemento de histerese de Bouc-Wen (Wen, 1980).
Figura 3.10 - Modelo de Bouc-Wen. (Stanway, et al., 1985, 1987).
A força neste sistema é dada pela Eq. 3.6.
F = c 0 x& + k 0 x + αz + f 0
(3.6)
20
onde c0 é o coeficiente de amortecimento plástico associado ao modelo de BoucWen, x& é a velocidade relativa das extremidades do amortecedor, k0 e f0 contabilizam
o efeito do acumulador, e z é a variável de estado que representa uma variável interna
do sistema, chamada de deslocamento de histerese e é descrita pela Eq. 3.7.
z& = −γ x& z z
n −1
n
− β x& z + Ax&
(3.7)
Pelo ajuste dos parâmetros do modelo, γ, β, A e n, pode-se controlar a
linearidade na ausência de carga e a transição suave antes e depois do carregamento
e forma da curva de histerese. A força f0 devido ao acumulador pode ser diretamente
incorporada a este modelo como uma deflexão inicial x0 da mola linear k0. Aplicando
estes valores na Eq. 3.7 tem-se:
F = c 0 x& + k 0 ( x − x 0 ) + αz
(3.8)
O modelo de Bouc-Wen prediz o comportamento força-deslocamento do
amortecedor e ele possui um comportamento força-velocidade muito parecido com os
resultados experimentais (Spencer et. al., 1996). Contudo, foi observado (Spencer et.
al., 1996), que ainda existe uma diferença quando em baixas velocidades para a
relação força-velocidade, além da sua complexidade.
3.2.4 Modelo de Bouc-Wen Modificado
Este modelo é empregado com o objetivo de melhorar a descrição da relação
entre força e velocidade. Este modelo é formado por um amortecedor c1 em série com
o modelo de Bouc-Wen de modo a fornecer o comportamento não linear existente
entre a força e a velocidade (Spencer et. al., 1996). Uma mola k1 é adicionada em
paralelo com o objetivo de contabilizar a ação do acumulador. É mostrado na Fig. 3.11
um esquema deste modelo.
21
Figura 3.11 - Modelo de Bouc-Wen Modificado (Spencer, et. al., 1996).
A força do amortecedor é calculada utilizando a Eq. 3.9.
(3.9)
F = c1 y& + k1 x + f 0
A velocidade y& é dada na Eq. 3.10.
y& =
1
{αz + c 0 x& + k 0 ( x − y )}
(c 0 + c1 )
(3.10)
A variável de estado z é descrita pela Eq. 3.11.
z& = −γ x& − y& z z
n −1
n
− β ( x& − y& ) z + A( x& − y& )
(3.11)
onde os parâmetros γ, β, A e n determinam a forma da curva de histerese.
Neste modelo, a rigidez do acumulador é representada por k1 e o
amortecimento viscoso de amortecimento para grandes velocidades é representado
por c0. O amortecedor representado por c1, é incluído para compensar a distorção a
baixas velocidades, k0 está presente para controlar a rigidez em altas velocidades, e x0
é o deslocamento inicial da mola k1 associada à força de amortecimento nominal
devido ao acumulador.
Segundo Spencer et. al. (1996), este modelo proposto atende bem ao
comportamento do amortecedor em todas as regiões inclusive na região onde a
aceleração e a velocidade têm sinais opostos e os valores de velocidade são
22
pequenos Porém possui uma grande complexidade para a obtenção dos seus
parâmetros.
Neste trabalho se adotou o modelo de Bingham, devido representar de maneira
satisfatória o comportamento do amortecedor MR, além de permitir a obtenção de
cada parâmetro da sua equação através dos ensaios experimentais.
23
4 MODELAGEM EXPERIMENTAL
Neste capítulo são apresentadas as bancadas montadas para a modelagem
experimental do amortecedor MR. No capítulo 5 são mostradas as variações dessas
montagens que permitiram a obtenção dos parâmetros do amortecedor MR.
O amortecedor MR objeto de estudo deste trabalho é o modelo MR RD 1005-3
produzido pela Lord Corporation e mostrado na Fig. 4.1
Figura 4.1 – Amortecedor magneto-reológico MR RD 1005-3.
Na tabela 4.1 é mostrada a sua especificação.
Tabela 4.1 – Especificação do amortecedor MR RD 1005-3.
Modelo
Comprimento com haste retraída
Comprimento com haste estendida
Diâmetro do corpo
Diâmetro da haste
Massa
Características elétricas
Forças amortecidas
Carregamento máximo
Tempo de resposta
4.1
MR RD 1005-3
0,155 m
0,209 m
0,041 m
0,010 m
0,8 kg
Corrente de entrada máxima: 2 A
Tensão de entrada: 12 VCC
0,05 m/s para 1A: => 226,8 kgf (2224
N)
0,20 m/s para 0A: =< 68 kgf (667 N)
453,57 kgf (4448 N)
< 25 ms tempo para alcançar 90% do
nível máximo variando de 0 a 1 A
Configuração experimental 1
24
A primeira bancada montada utiliza um atuador hidráulico para a excitação do
sistema e para medição de força e deslocamento uma célula de carga e um
potenciômetro, respectivamente (Fig. 4.2).
Figura 4.2 – Esquema da primeira bancada experimental.
Nas Tabelas 4.2, 4.3, 4.4, 4.5 e 4.6 são apresentadas às especificações do
atuador hidráulico, da célula de carga, do potenciômetro, da válvula proporcional
hidráulica, e da placa de aquisição de dados, respectivamente.
Tabela 4.2 – Especificação do atuador hidráulico.
Diâmetro do embolo
Diâmetro da haste
Curso
Pressão máxima de trabalho
Pressão de trabalho
Força de avanço (P = 8 MPa)
Força de retorno (P = 8 MPa)
0,032 m
0,014 m
0,200 m
10 MPa
8 MPa
670 kgf (6570,45 N)
207 kgf (2030 N)
Tabela 4.3 - Especificação da célula de carga.
Modelo
Capacidade Nominal
MS 200 Excel Sensors
200 kgf (1961,33 N)
25
Tabela 4.4 - Especificação do potenciômetro.
Modelo
Resistência
B 10 K
10 KΩ
Tabela 4.5 - Especificação da válvula proporcional hidráulica.
Vias de trabalho
Posições de comando
Tipo de centro
Acionamento elétrico
Sinal de corrente
Pressão máxima de trabalho
Vazão máxima
4
3
Fechado
Solenóide proporcional de 24 Vcc
150 a 800 mA
21 MPa
-4
3
3,3 x 10 m /s
Tabela 4.6 - Especificação da placa de aquisição de dados.
Modelo
Nº entradas analógicas
Nº saídas analógicas
Nº de canais digitais
Tensão de saída
Máxima taxa de saída
USB-6009
8
2
12
0 a 5Vcc
150 Hz
Como se pode observar através das tabelas apresentadas e do esquema da
Fig. 4.2, a solenóide da válvula proporcional hidráulica opera com um sinal de 150 a
800 mA, enquanto que a placa de aquisição de dados trabalha com um sinal de 0 a
5Vcc. As Figs. 4.3 e 4.4, respectivamente, apresentam o esquema e o circuito
montado para permitir a compatibilidade entre os sinais elétricos do solenóide e da
placa.
26
Figura 4.3 – Esquema do circuito conversor montado.
Figura 4.4 – Circuito conversor de 0 a 5 Vcc para 150 a 800mA.
27
Foram aferidos célula de carga e o potenciômetro linear. O primeiro com pesos
conhecidos e o segundo usando um paquímetro digital.
Na Figura 4.5 é mostrada a primeira bancada experimental.
Figura 4.5 – Primeira bancada experimental.
Na Figura 4.6 é mostrado o detalhe da montagem amortecedor MR, célula de
carga, atuador hidráulico e potenciômetro.
Figura 4.6 – Detalhe da montagem.
Como se pode observar essa montagem é feita na horizontal através de
suportes que foram fabricados para fixar o sistema amortecedor-célula de cargapotenciometro-atuador hidráulico a estrutura de Alumínio.
28
O objetivo do procedimento experimental é controlar o movimento do atuador
hidráulico, através de um sinal senoidal gerado através do computador, para que este
se movimente como um excitador mecânico. Ao mesmo tempo é medido a força e o
deslocamento do amortecedor MR.
Para permitir esta interface da válvula proporcional hidráulica, potenciômetro e
célula de carga ao computador é usado além da placa de aquisição de sinais um
programa desenvolvido em plataforma LabVIEW©.
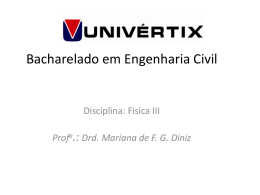
4.1.1 Resultados
A seguir são mostrados os resultados experimentais da configuração 1.
Frequência 1Hz Força
60
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
40
20
0
Força(N)
-20
-40
-60
-80
-100
-120
-140
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.7 - Gráfico Força x Tempo. Freqüência de 1Hz.
Pode-se observar o aumento gradual no valor da força com o aumento do valor
da tensão que está sendo submetida ao amortecedor MR. Isso ocorre até o valor de
tensão igual a 5V. A forma do gráfico é uma onda senoidal.
29
Frequência 1Hz Deslocamento
50
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
deslocamento(10-3m)
45
40
35
30
25
20
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.8 - Gráfico Deslocamento x Tempo. Freqüência de 1Hz.
O valor do deslocamento vai diminuindo de acordo com o valor de tensão
aplicada. Isso ocorre até o valor de tensão de 5V. Além disso a forma da curva tem
haver com o sinal senoidal de excitação gerado pelo atuador hidráulico.
Frequência 1.5Hz Força
100
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
50
força(N)
0
-50
-100
-150
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.9 - Gráfico Força x Tempo. Freqüência de 1,5Hz.
Novamente o comportamento é semelhante ao gráfico com freqüência de 1Hz
porém os valores de força são maiores devido ao aumento na freqüência de excitação.
30
À medida que se aumenta o valor da freqüência ocorre um aumento no valor da força,
como se pode observar nos outros gráficos.
Frequência 1.5Hz Deslocamento
36
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
34
deslocamento(10-3m)
32
30
28
26
24
22
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.10 - Gráfico Deslocamento x Tempo. Freqüência de 1,5Hz.
No gráfico deslocamento por tempo com a freqüência de 1,5Hz se pode notar
uma diferença no formato da curva referente à tensão de 0V comparado com os
gráficos da freqüência anterior. Esse comportamento ocorreu devido à resposta do
amortecedor para essa faixa de freqüência.
Frequência 2Hz Força
100
0V
1V
2V
3V
4V
5V
6V
7V
8V
50
força(N)
0
-50
-100
-150
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.11 - Gráfico Força x Tempo. Freqüência de 2,0Hz.
31
Pode-se notar uma mudança na forma da curva para os valores de tensão de
1V até 3V atribuída a uma folga muito pequena na bancada experimental.
Frequência 2Hz Deslocamento
32
0V
1V
2V
3V
4V
5V
6V
7V
8V
30
deslocamento(10-3m)
28
26
24
22
20
18
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.12 - Gráfico Deslocamento x Tempo. Freqüência de 2,0Hz.
Novamente é observado a saturação na variação das curvas a partir da tensão
de controle de 5V.
Frequência 2.5Hz Força
100
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
50
força(N)
0
-50
-100
-150
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.13 - Gráfico Força x Tempo. Freqüência de 2,5Hz.
32
Frequência 2.5Hz Deslocamento
32
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
31
deslocamento(10- 3m)
30
29
28
27
26
25
24
23
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.14 - Gráfico Deslocamento x Tempo. Freqüência de 2,5Hz.
Pode-se observar um comportamento diferente para os valores de tensão de
3V e 6V.
Frequência 3Hz Força
40
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
20
força(N)
0
-20
-40
-60
-80
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.15 – Gráfico Força x Tempo. Freqüência de 3,0Hz.
33
Frequência 3Hz Deslocamento
26
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
24
deslocamento(10-3m)
22
20
18
16
14
12
10
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.16 - Gráfico Deslocamento x Tempo. Freqüência de 3,0Hz.
Pode-se notar uma resposta diferente do amortecedor através dos gráficos
apresentados para a faixa de freqüência de 3Hz.
Frequência 3.5Hz Força
40
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
20
força(N)
0
-20
-40
-60
-80
-100
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.17 - Gráfico Força x Tempo. Freqüência de 3,5Hz.
34
Frequência 3.5Hz Deslocamento
25.5
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
25
deslocamento(10-3m)
24.5
24
23.5
23
22.5
22
21.5
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.18 - Gráfico Deslocamento x Tempo. Freqüência de 3,5Hz.
A leitura de deslocamento para a freqüência de 3,5Hz apresentou uma
variação pequena comparado com as outras freqüências até esse momento
apresentadas.
Frequência 4Hz Força
20
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
10
0
força(N)
-10
-20
-30
-40
-50
-60
-70
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.19 - Gráfico Força x Tempo. Freqüência de 4Hz.
35
Frequência 4Hz Deslocamento
25
0V
1V
2V
3V
4V
5V
6V
7V
8V
9V
10V
deslocamento(10-3m)
24.5
24
23.5
23
22.5
0
0.1
0.2
0.3
0.4
0.5
0.6
tempo(s)
0.7
0.8
0.9
1
Figura 4.20 - Gráfico Deslocamento x Tempo. Freqüência de 4Hz.
Através da análise dos resultados obtidos se observa uma saturação no
comportamento do amortecedor MR quando atinge a tensão de 5V. Acima desse valor
não se consegue perceber variação significativa nos valores da força e do
deslocamento medidos. Consultando a especificação do fabricante se encontra a
informação de valor de força amortecida relacionada ao valor máximo de corrente de
1A, mas não é fornecido com qual tipo de sinal é feito o controle. A caixa de controle
gera um sinal de saída em tensão para controlar o amortecedor MR. Mas analisando
esse valor de 1A do manual se conclui que o controle é feito por corrente já que a
tensão que ocorre a saturação é 5V que vale aproximadamente 1A.
A partir do comportamento do amortecedor e dos resultados obtidos, e devido
esta bancada não estar mais disponível para poder se repetir algumas medições, é
pensado em uma segunda configuração experimental, onde o controle será feito pelo
sinal de corrente.
Através de medições feitas na caixa de controle do amortecedor se observa
que ocorre uma variação no seu valor de saída. Com isso na próxima configuração
experimental é usada uma fonte de alimentação gerando um sinal de corrente em vez
da sua própria caixa de controle.
36
4.2
Configuração experimental 2
A segunda bancada montada utiliza um atuador pneumático para a excitação
do sistema, já que o atuador hidráulico não estava mais disponível. Está sendo
utilizado a mesma célula de carga do experimento anterior, e um acelerômetro em vez
do potenciômetro linear.
Nas Tabelas 4.7, 4.8 e 4.9 são apresentadas às especificações do atuador
pneumático, válvula direcional pneumática e do acelerômetro, respectivamente.
Tabela 4.7 – Especificação do atuador pneumático.
Diâmetro do embolo
Diâmetro da haste
Curso
Pressão máxima de trabalho
Pressão de trabalho
Força de avanço (P = 0.4 MPa)
Força de retorno (P = 0.4 MPa)
0,030 m
0,012 m
0,080 m
1,03 MPa
0,4 MPa
28,83 kgf (282,82 N)
24,21 kgf (237,50 N)
Tabela 4.8 - Especificação da válvula direcional pneumática.
Modelo
Vias de trabalho
Posições de comando
Avanço
Retorno
Acionamento elétrico
Pressão máxima de trabalho
Vazão máxima
VT 145242 Belton
5
2
Solenóide
Mola
Solenóide de 12 Vcc
1,02 MPa
-2
3
2,6 x 10 m /s
Tabela 4.9 - Especificação do acelerômetro.
Modelo
Sensor
Sensibilidade
353B03 PCB
Quartz
2
10 mV/g (1,02 mV/m/s )
Para permitir a leitura do acelerômetro é usada uma placa da National
Instruments, modelo NI 9234, que além da leitura do sinal fornece também a tensão de
alimentação.
Com o objetivo de se extrair o valor do deslocamento a partir da leitura do
acelerômetro são realizadas duas integrações utilizando o bloco de integração do
programa LabVIEW ©.
O sinal da célula de carga é lido através de uma placa modelo NI 9219 que
também fornece tensão de alimentação.
37
Essas duas placas são condicionadas em um suporte próprio que possui a
interface de comunicação via USB com o computador, como é mostrado na Fig. 4.21.
Figura 4.21 – Suporte com comunicação via USB com as duas placas encaixadas.
Para permitir a leitura e gravação dos dados dos sensores é utilizado um
programa em plataforma SignalExpress/LabVIEW©.
O objetivo do procedimento experimental é movimentar o sistema através do
atuador pneumático e medir os parâmetros de deslocamento, velocidade e força para
valores de freqüência diferentes.
Na Figura 4.22 é mostrada a segunda bancada experimental.
Figura 4.22 – Segunda bancada experimental.
38
Na Figura 4.23 é mostrado em detalhe a montagem mecânica.
Figura 4.23 – Detalhe da montagem experimental da segunda bancada.
Como se pode observar nessa segunda montagem experimental são utilizados
perfis de Alumínio da Bosch, de seção quadrada 45 x 45 mm.
Na Figura 4.24 é mostrado o detalhe da fixação do acelerômetro através da
sua base magnética.
Figura 4.24 – Detalhe da fixação do acelerômetro através da sua base magnética.
39
4.2.1 Resultados
A seguir são mostrados os resultados experimentais da configuração 2.
0,25A 1Hz
800
600
força(N)
400
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
tempo(s)
Figura 4.25 - Gráfico Força x Tempo. 0,25A - 1Hz.
Pode-se notar no gráfico de força por tempo para freqüência de excitação 1Hz
e corrente no amortecedor de 0,25A, que a sua forma está relacionada com a maneira
como o atuador pneumático movimentou o sistema experimental da configuração 2.
0,25A 1Hz
0.02
deslocamento(m)
0.015
0.01
0.005
0
-0.005 0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
-0.02
-0.025
tempo(s)
Figura 4.26 - Gráfico Deslocamento x Tempo. 0,25A - 1Hz.
O gráfico da Fig. 4.26 é o resultado de duas integrações da leitura da grandeza
de aceleração efetuada pelo acelerômetro.
40
0,50A 1Hz
600
400
força(N)
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.27 - Gráfico Força x Tempo. 0,50A - 1Hz.
É observada não mais a forma de um bico como no gráfico da Fig. 4.25, e sim
a formação de um patamar tanto na região de máximo como na de mínimo do gráfico
de força por tempo para 0,50A de corrente e 1Hz de freqüência de excitação.
0,50A 1Hz
0.006
0.005
deslocamento(m)
0.004
0.003
0.002
0.001
0
-0.001 0
0.5
1
1.5
2
2.5
3
-0.002
-0.003
-0.004
tempo(s)
Figura 4.28 - Gráfico Deslocamento x Tempo. 0,50A - 1Hz.
Pode-se notar próximo dos instantes de 0,5, 1, 1,5, 2 e 2,5 segundos, uma
região onde aparece uma oscilação no valor do deslocamento. Isto ocorre devido um
fenômeno de stick-slip interno no amortecedor.
41
0,75A 1Hz
600
400
força(N)
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.29 - Gráfico Força x Tempo. 0,75A - 1Hz.
Aparece novamente uma região de patamar tanto no máximo como no mínimo
do valor da força, porém pode-se observar devido ao aumento do valor da corrente do
amortecedor, o valor medido da força está diminuindo em relação aos gráficos
anteriores.
0,75A 1Hz
0.003
deslocamento(m)
0.002
0.001
0
-0.001
0
0.5
1
1.5
2
2.5
3
-0.002
-0.003
-0.004
tempo(s)
Figura 4.30 - Gráfico Deslocamento x Tempo. 0,75A - 1Hz.
Em relação ao gráfico da Fig. 4.30, a região de oscilação do deslocamento está
presente, mas os instantes que essa variação aparece são diferentes do gráfico da
Fig. 4.28.
42
1A 1Hz
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.31 - Gráfico Força x Tempo. 1A - 1Hz.
1A 1hz
0.003
deslocamento(m)
0.002
0.001
0
-0.001
0
0.5
1
1.5
2
2.5
3
-0.002
-0.003
-0.004
tempo(s)
Figura 4.32 - Gráfico Deslocamento x Tempo. 1A - 1Hz.
Nos dois últimos gráficos com a freqüência de excitação de 1Hz (Figs. 4.31 e
4.32) pode-se notar o mesmo comportamento dos gráficos anteriores exceto no de
valor de corrente de 0,25A. Este fato demonstra que a partir de 0,50A, tanto para a
força como para o deslocamento, o comportamento dos gráficos é parecido mudando
apenas os valores medidos que são proporcionais ao valor de corrente que está
submetido o amortecedor.
A seguir são mostrados os gráficos para o valor de freqüência de excitação de
2Hz.
43
0,25A 2Hz
800.00000
600.00000
força(N)
400.00000
200.00000
0.00000
-200.00000 0
0.5
1
1.5
2
2.5
3
-400.00000
-600.00000
-800.00000
tempo(s)
Figura 4.33 - Gráfico Força x Tempo. 0,25A - 2Hz.
Na Figura 4.33 novamente aparece os pontos em forma de bicos na região de
valor máximo da força semelhante ao gráfico de 0,25A 1Hz.
0,25A 2Hz
0.02
deslocamento(m)
0.015
0.01
0.005
0
-0.005 0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
-0.02
tempo(s)
Figura 4.34 - Gráfico Deslocamento x Tempo. 0,25A - 2Hz.
Para o valor de 0,25A e 2Hz não aparece à região de oscilação do valor do
deslocamento.
A partir do valor de corrente de 0,50A pode se observar nos gráficos de força
por tempo o aparecimento do patamar para os valores de máximo e mínimo da força,
e para os gráficos de deslocamento por tempo a oscilação no valor de deslocamento.
44
0,50A 2Hz
800
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.35 - Gráfico Força x Tempo. 0,50A - 2Hz.
0,50A 2Hz
0.006
deslocamento(m)
0.004
0.002
0
-0.002
0
0.5
1
1.5
2
2.5
3
-0.004
-0.006
-0.008
tempo(s)
Figura 4.36 - Gráfico Deslocamento x Tempo. 0,50A - 2Hz.
0,75A 2Hz
600
400
força(N)
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.37 - Gráfico Força x Tempo. 0,75A - 2Hz.
45
0,75A 2Hz
0.008
deslocamento(m)
0.006
0.004
0.002
0
-0.002 0
0.5
1
1.5
2
2.5
3
-0.004
-0.006
-0.008
tempo(s)
Figura 4.38 - Gráfico Deslocamento x Tempo. 0,75A - 2Hz.
1A 2Hz
600
400
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.39 - Gráfico Força x Tempo. 1A - 2Hz.
1A 2Hz
0.004
0.003
deslocamento(m)
força(N)
200
0.002
0.001
0
-0.001
0
0.5
1
1.5
2
2.5
3
-0.002
-0.003
tempo(s)
Figura 4.40 - Gráfico Deslocamento x Tempo. 1A - 2Hz.
46
0,25A 3Hz
800
600
força(N)
400
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
tempo(s)
Figura 4.41 - Gráfico Força x Tempo. 0,25A - 3Hz.
No gráfico da Fig. 4.41 já não aparece o ponto em forma de bico para a região
de máximo e sim uma curva mais suave semelhante a que aparece na região de
mínimo do valor da força.
0,25A 3Hz
deslocamento(m)
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
-0.01
0.5
1
1.5
2
2.5
3
-0.015
-0.02
-0.025
tempo(s)
Figura 4.42 - Gráfico Deslocamento x Tempo. 0,25A - 3Hz.
No gráfico do deslocamento pode-se notar até o instante de 1,25 segundos a
movimentação da haste do amortecedor em uma região positiva e após isso até o
instante final, a variação do deslocamento da sua haste na parte negativa do gráfico.
47
0,50A 3hz
800
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.43 - Gráfico Força x Tempo. 0,50A - 3Hz.
Diferentemente do que ocorreu com os gráficos de 1Hz e 2Hz não aparece a
região de patamar nos instantes de valor máximo e mínimo da força.
0,50A 3Hz
0.008
deslocamento(m)
0.006
0.004
0.002
0
-0.002 0
0.5
1
1.5
2
2.5
3
-0.004
-0.006
-0.008
tempo(s)
Figura 4.44 - Gráfico Deslocamento x Tempo. 0,50A - 3Hz.
No gráfico de deslocamento por tempo para 0,50A e 3Hz aparecem mais
instantes que ocorre a variação do deslocamento, comparando com as freqüências de
1 e 2Hz. Isso demonstra que para valores de freqüência mais alta o fenômeno do
stick-slip do amortecedor aparece mais vezes.
48
0,75A 3Hz
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.45 - Gráfico Força x Tempo. 0,75A - 3Hz.
Novamente para os gráficos de força por tempo para os valores de 0,75A e 1A
não aparece os patamares e sim pontos arredondados para os valores de máximo e
mínimo da força. Comportamento este diferente do que é visto nos gráficos para 1 e
2Hz de excitação para o mesmo valor de corrente.
0,75A 3Hz
0.008
deslocamento(m)
0.006
0.004
0.002
0
-0.002
0
0.5
1
1.5
2
2.5
3
-0.004
-0.006
tempo(s)
Figura 4.46 - Gráfico Deslocamento x Tempo. 0,75A - 3Hz.
1A 3Hz
800
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.47 - Gráfico Força x Tempo. 1A - 3Hz.
49
1A 3Hz
0.004
deslocamento(m)
0.003
0.002
0.001
0
-0.001
0
0.5
1
1.5
2
2.5
3
-0.002
-0.003
tempo(s)
Figura 4.48 - Gráfico Deslocamento x Tempo. 1A - 3Hz.
No gráfico da Fig. 4.48 pode-se notar uma oscilação muito maior do
deslocamento comparado aos gráficos anteriores. Esse aumento está relacionado ao
valor da freqüência como também com a corrente de 1A que está submetido o
amortecedor.
A seguir são apresentados os resultados para o valor de freqüência de
excitação de 4Hz.
0,25A 4Hz
800
600
força(N)
400
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
tempo(s)
Figura 4.49 - Gráfico Força x Tempo. 0,25A - 4Hz.
No gráfico da Fig. 4.49 aparece uma curva bem homogênea principalmente nos
valores de mínimo e máximo da força.
50
0,25A 4Hz
0.02
deslocamento(m)
0.015
0.01
0.005
0
-0.005
0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
tempo(s)
Figura 4.50 - Gráfico Deslocamento x Tempo. 0,25A - 4Hz.
No gráfico de deslocamento aparece uma movimentação da haste do
amortecedor tanto na região positiva como na negativa do gráfico. Além disso a
amplitude do deslocamento é pequena devido ao valor de freqüência de excitação de
4Hz.
0,50A 4Hz
800
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.51 - Gráfico Força x Tempo. 0,50A - 4Hz.
No gráfico de força por tempo para 0,50A e 4Hz é bem nítido o formato do
gráfico além do valor da amplitude da sua força.
51
deslocamento(m)
0,50A 4Hz
0.01
0.008
0.006
0.004
0.002
0
-0.002 0
-0.004
-0.006
-0.008
-0.01
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.52 - Gráfico Deslocamento x Tempo. 0,50A - 4Hz.
No gráfico de deslocamento para 0,50A ocorre o aparecimento de uma
pequena oscilação no valor do deslocamento em vários instantes do tempo
evidenciando assim o efeito stick-slip.
0,75A 4Hz
800
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.53 - Gráfico Força x Tempo. 0,75A - 4Hz.
No gráfico da Fig. 4.53 o formato da curva nos valores de mínimos e de
máximo, está bem homogêneo assim como ocorre com no gráfico de força para 0,50A.
52
0,75A 4Hz
0.004
deslocamento(m)
0.003
0.002
0.001
0
-0.001 0
0.5
1
1.5
2
2.5
3
-0.002
-0.003
-0.004
-0.005
tempo(s)
Figura 4.54 - Gráfico Deslocamento x Tempo. 0,75A - 4Hz.
No gráfico de deslocamento para 0,75A e 4Hz aparecem oscilações do
deslocamento em vários instantes de tempo, como já ocorreu com outros gráficos
apresentados.
1A 4Hz
800
600
400
força(N)
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
-1000
tempo(s)
Figura 4.55 - Gráfico Força x Tempo. 1A - 4Hz.
O gráfico de força para 1A é parecido com os outros gráficos apresentados
para essa faixa de freqüência, porém o gráfico de deslocamento possui oscilações de
menor valor do que o gráfico de 0,75A.
53
1A 4Hz
0.006
deslocamento(m)
0.004
0.002
0
-0.002
0
0.5
1
1.5
2
2.5
3
-0.004
-0.006
-0.008
tempo(s)
Figura 4.56 - Gráfico Deslocamento x Tempo. 1A - 4Hz.
4.3
Configuração experimental 3
A terceira bancada montada é mostrado na Fig. 4.57.
Figura 4.57 – Terceira bancada experimental.
As diferenças dessa bancada em relação a segunda são:
▪ a utilização de duas articulações que permitem com que os dois perfis se
movimentem como um pêndulo duplo;
▪ a fixação do atuador pneumático ao perfil superior;
▪ a colocação de uma massa conhecida na extremidade do perfil inferior; e
▪ o conjunto amortecedor MR-célula de carga-acelerômetro está fixado na parte
de fora da estrutura.
54
O procedimento experimental se dá através da movimentação do atuador
pneumático que movimenta o perfil superior e este desloca o perfil inferior devido à
massa que está fixada em sua extremidade. Quando ocorre este movimento dos dois
perfis ocorre o deslocamento da haste do amortecedor MR
A força, a velocidade e o deslocamento são medidos através da célula de
carga e do acelerômetro utilizados na configuração anterior.
4.3.1 Resultados
0A 1Hz
2500
2000
força(N)
1500
1000
500
0
-500
0
0.5
1
1.5
2
2.5
3
-1000
tempo(s)
Figura 4.58 - Gráfico Força x Tempo. 0A - 1Hz.
Pode-se notar no gráfico de força por tempo para 0A e 1Hz, que a sua
aparência é relacionada à excitação do amortecedor na bancada experimental da
configuração 3.
deslocamento(m)
0A 1Hz
0.05
0.04
0.03
0.02
0.01
0
-0.01 0
-0.02
-0.03
-0.04
-0.05
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.59 - Gráfico Deslocamento x Tempo. 0A - 1Hz.
55
No gráfico de deslocamento podem ser observadas regiões de mínimo e
máximo que foram visíveis durante o experimento.
0,25A 1Hz
1500
força(N)
1000
500
0
0
0.5
1
1.5
2
2.5
3
-500
-1000
tempo(s)
Figura 4.60 - Gráfico Força x Tempo. 0,25A - 1Hz.
No gráfico de força por tempo para 0,25A e 1Hz são evidentes os pontos de
máximos e mínimos do valor da força.
0,25A 1Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02
0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
tempo(s)
Figura 4.61 - Gráfico Deslocamento x Tempo. 0,25A - 1Hz.
No gráfico de deslocamento se pode notar a movimentação da haste do
amortecedor tanto na região positiva como na negativa do gráfico.
56
0,50A 1Hz
2000
1500
força(N)
1000
500
0
-500
0
0.5
1
1.5
2
2.5
3
-1000
-1500
tempo(s)
Figura 4.62 - Gráfico Força x Tempo. 0,50A - 1Hz.
Tanto no gráfico de força para 0,50A como para 0,75A é bem nítido as regiões
onde a força do amortecedor aparece durante o experimento.
0,50A 1Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02
0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
tempo(s)
Figura 4.63 - Gráfico Deslocamento x Tempo. 0,50A - 1Hz.
0,75A 1Hz
2500
2000
1500
força(N)
1000
500
0
-500 0
0.5
1
1.5
2
2.5
3
-1000
-1500
-2000
tempo(s)
Figura 4.64 - Gráfico Força x Tempo. 0,75A - 1Hz.
57
deslocamento(m)
0,75A 1Hz
0.05
0.04
0.03
0.02
0.01
0
-0.01 0
-0.02
-0.03
-0.04
-0.05
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.65 - Gráfico Deslocamento x Tempo. 0,75A - 1Hz.
Os gráficos de deslocamento para 0,75A e 1A são semelhantes, aparecendo
uma região de pequena oscilação no valor do deslocamento após os pontos de valor
máximo.
1A 1Hz
250
200
150
força(N)
100
50
0
-50 0
0.5
1
1.5
2
2.5
3
-100
-150
-200
tempo(s)
Figura 4.66 - Gráfico Força x Tempo. 1A - 1Hz.
1A 1Hz
0.04
deslocamento(m)
0.03
0.02
0.01
0
-0.01 0
0.5
1
1.5
2
2.5
3
-0.02
-0.03
-0.04
-0.05
tempo(s)
Figura 4.67 - Gráfico Deslocamento x Tempo. 1A - 1Hz.
A seguir são apresentados os resultados para o valor de freqüência de 2Hz.
58
0A 2Hz
1000
800
600
força(N)
400
200
0
-200 0
0.5
1
1.5
2
2.5
3
-400
-600
-800
tempo(s)
Figura 4.68 - Gráfico Força x Tempo. 0A - 2Hz.
No gráfico da Fig. 4.68 são bem nítidos os pontos de máximos e de mínimos
dos valores da força.
0A 2Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02
0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
tempo(s)
Figura 4.69 - Gráfico Deslocamento x Tempo. 0A - 2Hz.
Novamente se observa uma movimentação da haste do amortecedor em uma
região positiva e negativa do gráfico.
Pode-se notar que de 0,25A até 1A os gráficos de força e de deslocamento se
comportam de maneira semelhante apenas com uma variação no valor da amplitude
de um valor de corrente para o outro. Essa variação realmente tem que ocorrer já que
o valor da corrente de controle do amortecedor está aumentando.
59
0,25A 2Hz
150
100
força(N)
50
0
-50
0
0.5
1
1.5
2
2.5
3
-100
-150
tempo(s)
Figura 4.70 - Gráfico Força x Tempo. 0,25A - 2Hz.
0,25A 2Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02
0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
tempo(s)
Figura 4.71 - Gráfico Deslocamento x Tempo. 0,25A - 2Hz.
0,50A 2Hz
2000
1500
força(N)
1000
500
0
-500 0
0.5
1
1.5
2
2.5
3
-1000
-1500
-2000
tempo(s)
Figura 4.72 - Gráfico Força x Tempo. 0,50A - 2Hz.
60
0,50A 2Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02 0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
-0.08
tempo(s)
Figura 4.73 - Gráfico Deslocamento x Tempo. 0,50A - 2Hz.
0,75A 2Hz
2500
2000
1500
força(N)
1000
500
0
-500 0
0.5
1
1.5
2
2.5
3
-1000
-1500
-2000
tempo(s)
Figura 4.74 - Gráfico Força x Tempo. 0,75A - 2Hz.
0,75A 2Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02
0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
tempo(s)
Figura 4.75 - Gráfico Deslocamento x Tempo. 0,75A - 2Hz.
61
1A 2Hz
2500
2000
1500
força(N)
1000
500
0
-500 0
0.5
1
1.5
2
2.5
3
-1000
-1500
-2000
tempo(s)
Figura 4.76 - Gráfico Força x Tempo. 1A - 2Hz.
1A 2Hz
0.08
deslocamento(m)
0.06
0.04
0.02
0
-0.02 0
0.5
1
1.5
2
2.5
3
-0.04
-0.06
-0.08
tempo(s)
Figura 4.77 - Gráfico Deslocamento x Tempo. 1A - 2Hz.
A seguir são apresentados os resultados para o valor de freqüência de
excitação de 3Hz.
0A 3Hz
800
600
força(N)
400
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
tempo(s)
Figura 4.78 - Gráfico Força x Tempo. 0A - 3Hz.
62
No gráfico da Fig. 4.78 podemos reparar quatro regiões onde houve um pico no
valor de máximo da força medida. Isto ocorre devido ao efeito de stick-slip interno do
amortecedor.
0A 3Hz
0.02
deslocamento(m)
0.015
0.01
0.005
0
-0.005 0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
-0.02
tempo(s)
Figura 4.79 - Gráfico Deslocamento x Tempo. 0A - 3Hz.
No gráfico de deslocamento por tempo pode-se notar um formato mais
homogêneo, mas com movimentação tanto na parte positiva como na negativa do
gráfico.
força(N)
0,25A 3Hz
500
400
300
200
100
0
-100 0
-200
-300
-400
-500
-600
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.80 - Gráfico Força x Tempo. 0,25A - 3Hz.
No gráfico de força para 0,25A e 3Hz, diferentemente do que se pode observar
no gráfico da figura 4.78, não aparece mais os pontos de pico do valor da força.
63
0,25A 3Hz
0.025
deslocamento(m)
0.02
0.015
0.01
0.005
0
-0.005 0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
-0.02
tempo(s)
Figura 4.81 - Gráfico Deslocamento x Tempo. 0,25A - 3Hz.
Novamente se pode observar a variação tanto positiva como negativa do
deslocamento da haste.
Os gráficos de força e deslocamento para 0,50A, 0,75A e 1A são semelhantes,
variando apenas o valor da sua amplitude.
força(N)
0,50A 3Hz
600
500
400
300
200
100
0
-100 0
-200
-300
-400
-500
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.82 - Gráfico Força x Tempo. 0,50A - 3Hz.
0,50A 3Hz
0.02
deslocamento(m)
0.015
0.01
0.005
0
-0.005 0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
-0.02
tempo(s)
Figura 4.83 - Gráfico Deslocamento x Tempo. 0,50A - 3Hz.
64
0,75A 3Hz
600
400
força(N)
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
-600
tempo(s)
Figura 4.84 - Gráfico Força x Tempo. 0,75A - 3Hz.
0,75A 3Hz
0.015
deslocamento(m)
0.01
0.005
0
-0.005
0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
tempo(s)
Figura 4.85 - Gráfico Deslocamento x Tempo. 0,75A - 3Hz.
força(N)
1A 3Hz
500
400
300
200
100
0
-100 0
-200
-300
-400
-500
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.86 - Gráfico Força x Tempo. 1A - 3Hz.
65
1A 3Hz
0.015
deslocamento(m)
0.01
0.005
0
-0.005
0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
tempo(s)
Figura 4.87 - Gráfico Deslocamento x Tempo. 1A - 3Hz.
A seguir são apresentados os gráficos para o valor de freqüência de excitação
de 4Hz.
0A 4Hz
100
80
força(N)
60
40
20
0
-20
0
0.5
1
1.5
2
2.5
3
-40
tempo(s)
Figura 4.88 - Gráfico Força x Tempo. 0A - 4Hz.
No gráfico de força aparece na região inicial e final do gráfico, pontos de pico
do valor da força.
0A 4Hz
0.025
deslocamento(m)
0.02
0.015
0.01
0.005
0
-0.005 0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
-0.02
tempo(s)
Figura 4.89 - Gráfico Deslocamento x Tempo. 0A - 4Hz.
66
No gráfico de deslocamento aparece uma região na parte positiva e outra na
parte negativa, demonstrando assim como o amortecedor foi movimentando durante o
experimento.
força(N)
0,25A 4Hz
500
400
300
200
100
0
-100 0
-200
-300
-400
-500
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.90 - Gráfico Força x Tempo. 0,25A - 4Hz.
No gráfico de força para 0,25A, não aparecem os pontos de pico na parte inicial
e final do gráfico presentes no gráfico da Fig. 4.88.
No gráfico de deslocamento da Fig. 4.91, a variação entre a parte positiva e
negativa do gráfico é menor do que nos gráficos apresentados anteriormente.
0,25A 4Hz
0.015
deslocamento(m)
0.01
0.005
0
-0.005
0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
tempo(s)
Figura 4.91 - Gráfico Deslocamento x Tempo. 0,25A - 4Hz.
67
força(N)
0,50A 4Hz
500
400
300
200
100
0
-100 0
-200
-300
-400
-500
-600
0.5
1
1.5
2
2.5
3
tempo(s)
Figura 4.92 - Gráfico Força x Tempo. 0,50A - 4Hz.
No gráfico de força por tempo para 0,50A aparecem pontos de pico no valor
mínimo nos instantes de tempo entre 1 e 2 segundos.
0,50A 4Hz
deslocamento(m)
0.015
0.01
0.005
0
0
0.5
1
1.5
2
2.5
3
-0.005
-0.01
tempo(s)
Figura 4.93 - Gráfico Deslocamento x Tempo. 0,50A - 4Hz.
0,75A 4Hz
600
400
força(N)
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
-600
tempo(s)
Figura 4.94 - Gráfico Força x Tempo. 0,75A - 4Hz.
No gráfico da Fig. 4.94 aparecem pontos de pico no valor do mínimo da força
entre os instantes de 1,5 e 2 segundos, como já havia acontecido no gráfico da Fig.
4.92.
68
0,75A 4Hz
0.015
deslocamento(m)
0.01
0.005
0
-0.005
0
0.5
1
1.5
2
2.5
3
-0.01
-0.015
tempo(s)
Figura 4.95 - Gráfico Deslocamento x Tempo. 0,75A - 4Hz.
1A 4Hz
600
400
força(N)
200
0
-200
0
0.5
1
1.5
2
2.5
3
-400
-600
tempo(s)
Figura 4.96 - Gráfico Força x Tempo. 1A - 4Hz.
No gráfico de força (Fig. 4.96) aparecem pontos de pico no valor de mínimo da
força na região central do gráfico.
No gráfico de deslocamento (Fig. 4.97) aparece um trecho do gráfico mais
evidente na parte negativa compreendida entre os instantes de 1,5 e 2,5 segundos.
1A 4Hz
0.008
deslocamento(m)
0.006
0.004
0.002
0
-0.002 0
0.5
1
1.5
2
2.5
3
-0.004
-0.006
-0.008
-0.01
tempo(s)
Figura 4.97 - Gráfico Deslocamento x Tempo. 1A - 4Hz.
69
5 FORMULAÇÃO DO AMORTECEDOR MR
Neste capítulo é apresentada a obtenção dos parâmetros necessários para a
formulação matemática do amortecedor MR utilizado neste trabalho.
Como já foi descrito, existem quatro modelos matemáticos capazes de
descrever o comportamento não-linear do amortecedor MR.
O modelo de Bouc-Wen modificado é citado muitas vezes, mas os autores
associam a sua complexidade a um melhor resultado, o que não foi comprovado.
É observado também, que os autores não explicam como obtém os
parâmetros, independentemente do modelo adotado. Como esta formulação é
fenomenológica, conclui-se que pode ocorrer variação nesses valores mesmo quando
se trata de amortecedores do mesmo modelo, havendo assim a necessidade da
análise do comportamento experimental para a obtenção dos parâmetros.
Como a finalidade e a inovação deste estudo é a formulação experimental
capaz de obter cada parâmetro que descreve o seu comportamento, é escolhido o
modelo de Bingham que possui três parâmetros a se determinar, como é mostrado na
Eq. 5.1.
F = f c sgn( x& ) + c0 x& + f 0
(5.1)
onde x& é a velocidade relativa das extremidades do amortecedor, sgn( ) é a função
sinal, c0 é a constante de amortecimento plástico, ou seja, é o coeficiente de
amortecimento observada após o escoamento do fluido e f c é a força relacionada à
tensão de escoamento do fluido.
Uma parcela de força, f 0 , é incluída para os valores de força medidos devido à
presença do acumulador no interior do amortecedor. Com base na Eq. 5.1, podemos
concluir que, se em algum ponto, a velocidade do pistão for igual a zero, a força
gerada pelo mecanismo, F , é igual a força interna do acumulador, f 0 (offset).
A seguir são mostrados como são obtidos cada um dos parâmetros.
70
5.1
Obtenção do Parâmetro f0
O parâmetro f0 representa na modelagem de Bingham a força devido à
presença do acumulador interno do amortecedor magneto-reológico (Liao, 2011 e
Lord, 2007). Esse valor pode ser considerado como um offset do sistema magnetoreológico.
Para obter esse parâmetro é utilizada a montagem experimental mostrada na
Fig. 5.1, que é uma variação da terceira bancada apresentada no capítulo 4.
Figura 5.1 – Esquema do experimento para a obtenção do parâmetro fo.
Após a movimentação do amortecedor para a posição fechada, é aplicado um
valor de corrente elétrica no amortecedor. A partir dessa posição, o amortecedor é
empurrado para baixo até chegar na sua posição totalmente aberto. Através da célula
de carga é medida a força e com o uso de um potenciômetro rotativo é medido o
deslocamento linear, através do esquema mostrado na Fig. 5.2.
71
Figura 5.2 – Esquema da montagem do potenciômetro rotativo.
Na Figura 5.3 é mostrado em detalhe a fixação do potenciômetro rotativo.
Figura 5.3 – Detalhe da fixação do potenciômetro rotativo.
72
O
conjunto potenciômetro/disco foi calibrado através
da relação do
comprimento da circunferência do disco com a tensão medida entre os terminais do
potenciômetro, sabendo que a tensão de alimentação aplicada é igual a 5V. Esse
cálculo é mostrado no esquema da Fig. 5.4.
Figura 5.4 – Calibração do potenciômetro.
Pode-se notar que a leitura do potenciômetro apresenta vários degraus ao
longo do tempo. Este comportamento também ocorre quando se movimenta o
potenciômetro fora da montagem experimental. Logo se conclui que este fato é
atribuído ao potenciômetro e não ao amortecedor ou a montagem experimental.
Para tentar melhorar ou minimizar esse efeito é testado outro potenciômetro e
constata-se que o segundo está tendo uma resposta pior do que o primeiro. Isso é
mostrado nas Figs. 5.5 e 5.6, onde esse degrau é medido utilizando recurso do próprio
SignalExpress/LabVIEW©.
Figura 5.5 - Segundo potenciômetro - altura do degrau: 0,1259mV.
73
Figura 5.6 - Primeiro potenciômetro - altura degrau: 0,044mV.
Com isso manteve-se na montagem experimental o primeiro potenciômetro.
Além disso, esse patamar apresentado não afeta a medição devido a sua ordem de
grandeza ser pequena em relação aos valores medidos.
Para cada valor de corrente (0A, 0,25A, 0,50A, 0,75A e 1A) é realizado um
ensaio e cada medição é feita três vezes.
O resultado ideal para os valores medidos através do experimento apresentado
é um gráfico força x deslocamento com patamares perfeitos que demonstram o valor
constante da força que expressa o parâmetro f0, já que esse valor aparece
independente da condição de movimento ou não da haste do amortecedor. Além
disso, o f0 fica evidente quando a velocidade é igual a zero já que os outros termos da
equação de Bingham se tornam nulos, como é demonstrado na Eq. 5.2.
0
F = Fc . sgn( x& ) + co.x& + fo = fo
(5.2)
Porém essa condição ideal encontrada na bibliografia não ocorreu no
experimento, evidenciando assim um comportamento experimental diferente do
teórico.
Os resultados encontrados são apresentados nas Figs. 5.7, 5.8, 5.9, 5.10 e
5.11 através do valor da média das três medições realizadas para cada ensaio.
74
parametro fo 0A
20
0
força(N)
-0.01
-20
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
-40
-60
-80
-100
-120
deslocamento(m)
Figura 5.7 – Gráfico Força x Deslocamento 0A.
força(N)
parâmetro fo 0,25A
140
120
100
80
60
40
20
0
-20
0.0000
-40
-60
0.0100
0.0200
0.0300
0.0400
0.0500
0.0600
0.0500
0.0600
deslocamento (m)
Figura 5.8 – Gráfico Força x Deslocamento 0,25A.
parâmetro fo 0,50A
200
150
força(N)
100
50
0
0.0000
-50
0.0100
0.0200
0.0300
0.0400
-100
deslocamento (m)
Figura 5.9 – Gráfico Força x Deslocamento 0,50A.
75
parâmetro fo 0,75A
200
150
força(N)
100
50
0
-50 0
0.01
0.02
0.03
0.04
0.05
0.06
0.050000
0.060000
-100
-150
-200
deslocamento (m)
Figura 5.10 – Gráfico Força x Deslocamento 0,75A.
força(N)
parâmetro fo 1A
250
200
150
100
50
0
-50
0.000000
-100
-150
-200
-250
0.010000
0.020000
0.030000
0.040000
deslocamento (m)
Figura 5.11 – Gráfico Força x deslocamento 1A.
Na Figura 5.12 são mostrados todos os gráficos obtidos através dos diferentes
valores de corrente de controle do amortecedor.
parâmetro fo
250
200
150
força(N)
100
0A
50
0,25A
0
-0.01
-50 0
0,50A
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0,75A
1A
-100
-150
-200
-250
deslocamento(m)
Figura 5.12 – Gráfico Força x Deslocamento.
76
Pode-se concluir que o f0, que na condição ideal seria um valor constante
quando a velocidade é igual a zero, varia com a posição onde se encontra a haste do
amortecedor, como ficou evidente nos gráficos obtidos experimentalmente.
Devido essa variação do f0 com o deslocamento, se adota um procedimento
para a sua determinação de acordo com duas faixas de deslocamento. Uma na região
inicial do gráfico e outra em uma segunda região onde o valor da força tende a
aproximadamente se estabilizar.
Como uma maneira de se aproximar o gráfico da condição ideal, se adotou
aplicar uma linearização nessas duas faixas distintas do gráfico. Com isso se
determina o f0 para cada faixa de deslocamento considerada, através da equação da
reta de cada linearização.
Nas Figuras 5.13, 5.14, 5.15, 5.16 e 5.17 são mostradas a linearização para
cada valor de corrente.
Figura 5.13 – Linearização parâmetro f0 0A.
Figura 5.14 – Linearização parâmetro f0 0,25A.
77
Figura 5.15 – Linearização parâmetro f0 0,50A.
Figura 5.16 – Linearização parâmetro f0 0,75A.
Figura 5.17 – Linearização parâmetro f0 1A.
A partir desse procedimento é encontrado o valor do parâmetro f0 para cada
valor de corrente.
78
Tabela 5.1 – Valores de f0 0A.
Corrente: 0A
Faixa de deslocamento(m)
f0 (N)
0 ↔ 0,0146
3682,7(deslocamento)-86,983
0,0146 ↔ 0,0577
448,88(deslocamento)-41,04
Tabela 5.2 – Valores de f0 0,25A.
Corrente: 0,25A
Faixa de deslocamento(m)
f0 (N)
0 ↔ 0,0146
11457(deslocamento)-26,98
0,0146 ↔ 0,0551
-303,2(deslocamento)+144,71
Tabela 5.3 – Valores de f0 0,50A.
Corrente: 0,50A
Faixa de deslocamento(m)
f0 (N)
0 ↔ 0,0146
8726,92(deslocamento)-24,55
0,0146 ↔ 0,0551
-277,27(deslocamento)+106,95
Tabela 5.4 – Valores de f0 0,75A.
Corrente: 0,75A
Faixa de deslocamento(m)
f0 (N)
0 ↔ 0,0146
1435,65(deslocamento)-10,697
0,0146 ↔ 0,0547
191,86(deslocamento)+7,4628
Tabela 5.5 – Valores de f0 1A.
Corrente: 1A
Faixa de deslocamento(m)
f0 (N)
0 ↔ 0,0146
18700,72(deslocamento)-139,44
0,0146 ↔ 0,0552
1106,1(deslocamento)+119,20
79
5.2
Obtenção dos Parâmetros fC e c0
Analisando a equação de Bingham conclui-se que mesmo tendo determinado o
f0 falta um procedimento capaz de extrair os valores de fc e c0, para valores de força e
de velocidade conhecidos.
Por isso é realizado um experimento semelhante ao usado para a obtenção do
parâmetro f0. A partir da posição do amortecedor com a haste totalmente retraída
(fechado), são pendurado pesos conhecidos e aplicado um valor de corrente. Após
isso, através do potenciômetro é medido a velocidade de descida do amortecedor
devido a ação do peso.
Na Figura 5.13 é mostrada essa configuração.
Figura 5.18 – Experimento para determinação dos parâmetros fc e c0.
Portanto, conhecendo a força, tendo-se medido a velocidade, e já tendo
determinado o f0, a equação de Bingham passou a ter apenas dois parâmetros a
determinar: fc e c0.
Como os gráficos obtidos de deslocamento por tempo possuem um
comportamento linear, é possível se extrair os valores de velocidade através do
cálculo do seu coeficiente angular. Os gráficos de velocidade por tempo, para cada
80
valor de corrente de controle (0A, 0,25A, 0,50A, 0,75A e 1A) relacionado a cada valor
de peso (52,00 N, 70,00 N, 104,50 N e 122,20 N), são mostrados a seguir.
52,00N 0A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
30
tempo(s)
Figura 5.19– Gráfico Deslocamento x Tempo 52,00N 0A. V=0,001261m/s.
70,00N 0A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
30
tempo(s)
Figura 5.20– Gráfico Deslocamento x Tempo 70,00N 0A. V=0,001431m/s.
104,50N 0A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
30
tempo(s)
Figura 5.21– Gráfico Deslocamento x Tempo 104,50N 0A. V=0,001671m/s.
81
122,20N 0A
0.06
deslocamento(m)
0.05
0.04
0.03
0.02
0.01
0
-0.01 0
2
4
6
8
10
12
14
16
18
tempo(s)
Figura 5.22– Gráfico Deslocamento x Tempo 122,20N 0A. V=0,001825m/s.
52,00N 0,25A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.23– Gráfico Deslocamento x Tempo 52,00N 0,25A. V=0,000972m/s.
70,00N 0,25A
0.025
deslocamento(m)
0.02
0.015
0.01
0.005
0
-0.005
0
5
10
15
20
25
tempo(s)
Figura 5.24– Gráfico Deslocamento x Tempo 70,00N 0,25A. V=0,001180m/s.
82
104,50N 0,25A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.25– Gráfico Deslocamento x Tempo 104,50N 0,25A. V=0,001214m/s.
122,20N 0,25A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.26– Gráfico Deslocamento x Tempo 122,20N 0,25A. V=0,001626m/s.
52,00N 0,50A
0.03
deslocamento(m)
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
30
tempo(s)
Figura 5.27– Gráfico Deslocamento x Tempo 52,00N 0,50A. V=0,000855m/s.
83
70,00N 0,50A
deslocamento(m)
0.04
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.28– Gráfico Deslocamento x Tempo 70,00N 0,50A. V=0,001015m/s.
104,50N 0,50A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.29– Gráfico Deslocamento x Tempo 104,50N 0,50A. V=0,001185m/s.
122,20N 0,50A
0.05
deslocamento(m)
0.04
0.03
0.02
0.01
0
-0.01
0
5
10
15
20
25
tempo(s)
Figura 5.30– Gráfico Deslocamento x Tempo 122,20N 0,50A. V=0,001481 m/s.
84
52,00N 0,75A
deslocamento(m)
0.02
0.015
0.01
0.005
0
0
5
10
15
20
25
-0.005
tempo(s)
Figura 5.31– Gráfico Deslocamento x Tempo 52,00N 0,75A. V=0,000578m/s.
70,00N 0,75A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.32– Gráfico Deslocamento x Tempo 70,00N 0,75A. V=0,000789m/s.
deslocamento(m)
104,50N 0,75A
0.045
0.04
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.33– Gráfico Deslocamento x Tempo 104,50N 0,75A. V=0,000953m/s.
85
122,20N 0,75A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.34– Gráfico Deslocamento x Tempo 122,20N 0,75A. V=0,001256m/s.
52,00N 1A
0.012
deslocamento(m)
0.01
0.008
0.006
0.004
0.002
0
-0.002 0
5
10
15
20
25
tempo(s)
Figura 5.35– Gráfico Deslocamento x Tempo 52,00N 1A. V=0,000509m/s.
70,00N 1A
0.025
deslocamento(m)
0.02
0.015
0.01
0.005
0
-0.005
0
5
10
15
20
25
tempo(s)
Figura 5.36– Gráfico Deslocamento x Tempo 70,00N 1A. V=0,000698m/s.
86
104,50N 1A
0.03
deslocamento(m)
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.37– Gráfico Deslocamento x Tempo 104,50N 1A. V=0,000846m/s.
122,20N 1A
0.035
deslocamento(m)
0.03
0.025
0.02
0.015
0.01
0.005
0
-0.005 0
5
10
15
20
25
tempo(s)
Figura 5.38 - Gráfico Deslocamento x Tempo 122,20N 1A. V=0,001131m/s.
Através dos gráficos obtidos, pode-se concluir que os valores obtidos
experimentalmente para a velocidade são coerentes, já que em uma determinada faixa
de corrente, à medida que o valor do peso aumenta a velocidade também aumenta,
mas quando se passa para a faixa seguinte de corrente, o valor da velocidade diminui
para cada valor de peso.
Com isso, conhecendo o valor da força (F), o valor da velocidade ( x& ) e o valor
do f0, é montado um sistema de equações lineares, a partir da manipulação da
equação de Bingham. Para cada faixa de deslocamento e valor de corrente, são
montadas quatro equações como é mostrado na Eqs. 5.3 e na 5.4.
87
F1 − f 01 = Fc .sign( x&1 ) + C 0 ( x&1 )
F − f = F .sign( x& ) + C ( x& )
2
01
c
2
0
2
&
&
F
−
f
=
F
.
sign
(
x
)
+
C
(
x
01
c
3
0
3)
3
F4 − f 01 = Fc .sign( x& 4 ) + C 0 ( x& 4 )
(5.3)
F1 − f 02 = Fc .sign( x&1 ) + C 0 ( x&1 )
F − f = F .sign( x& ) + C ( x& )
2
02
c
2
0
2
F3 − f 02 = Fc .sign( x& 3 ) + C 0 ( x& 3 )
F4 − f 02 = Fc .sign( x& 4 ) + C 0 ( x& 4 )
(5.4)
Onde: F1 = 52,00 N, F2 = 70,00 N, F3 = 104,50 N, F4 = 122,20 N, x&1 , x& 2 , x&3 e
x& 4 são as velocidades relacionadas ao valores de corrente e de peso, obtidos através
dos gráficos apresentados, e o f01 e o f02 são os valores dos extremos da faixa do
parâmetro fo relacionado ao valor da corrente, obtidos na seção 5.1.
Substituindo os valores nas Eqs. 5.3 e 5.4 e resolvendo os sistemas de
equações através do método dos mínimos quadrados, se obtém os valores para fc e c0
relacionados ao valor de corrente e faixa de deslocamento.
Na Tabela 5.6 são mostrados todos os parâmetros da equação de Bingham
obtidos experimentalmente para o amortecedor MR RD 1005-3.
88
Tabela 5.6 - Valores dos parâmetros obtidos para o amortecedor MR RD 1005-3.
0A
Deslocamento(m)
f0(N)
C0(N/m/s)
fc(N)
0 ↔ 0,0146
-86,99 ↔ -34,68
118731,75
-182,26 ↔ -129,96
0,0146 ↔ 0,0577
-34,68 ↔ -15,13
118,731,75
-129,96 ↔ -110,41
Deslocamento(m)
f0(N)
C0(N/m/s)
fc(N)
0 ↔ 0,0146
-26,98 ↔ 140,29
104694,00↔104709,30
-70,57 ↔ 96,68
0,0146 ↔ 0,0551
140,28 ↔ 128,00
104709,30
96,67 ↔ 84,39
Deslocamento(m)
f0(N)
C0(N/m/s)
fc(N)
0 ↔ 0,0146
-24,55 ↔ 102,85
115934,92
-68,95 ↔ 58,44
0,0146 ↔ 0,0551
102,90 ↔ 91,56
115934,92
58,49 ↔ 47,16
Deslocamento(m)
f0(N)
C0(N/m/s)
fc(N)
0 ↔ 0,0146
-10,69 ↔ 10,26
108584,06↔108590.02
-20,70 ↔ 0,25
0,0146 ↔ 0,0547
10,26 ↔ 17,95
108449,80↔108584,06
0,45 ↔ 7,94
Deslocamento(m)
f0(N)
C0(N/m/s)
fc(N)
0 ↔ 0,0146
-139,44 ↔ 135,46
118064,13
-146,34 ↔ 128,55
0,0146 ↔ 0,0552
135,46 ↔ 180,25
118063,48↔118064,13
128,55 ↔ 173,34
0,25A
0,50A
0,75A
1A
Analisando os valores encontrados pode-se concluir que apesar dos valores de
fo e do fc variarem com o deslocamento o c0 se mantém constante, como é mostrado
nos gráficos a seguir.
89
200
150
100
0A
fo(N)
50
0,25A
0
-0.0023
-50
0,50A
0.0077
0.0177
0.0277
0.0377
0.0477
0.0577
0,75A
1A
-100
-150
-200
deslocamento(m)
Figura 5.39 – Gráfico do parâmetro f0 por deslocamento.
150
100
fc(N)
50
0
-0.0023
-50
0A
0,25A
0.0077
0.0177
0.0277
0.0377
0.0477
0.0577
0,50A
0,75A
1A
-100
-150
-200
deslocamento(m)
Figura 5.40 – Gráfico do parâmetro fC por deslocamento.
120000
118000
co(N/m/s)
116000
0A
114000
0,25A
112000
0,50A
110000
0,75A
108000
1A
106000
104000
102000
-0.0023
0.0077
0.0177
0.0277
0.0377
0.0477
0.0577
deslocamento(m)
Figura 5.41 – Gráfico do parâmetro c0 por deslocamento.
90
Pode-se observar através do gráfico da Fig. 5.42 que ocorre uma variação
linear quando a corrente é igual a 0A, evidenciando nessa condição o comportamento
Newtoniano do fluido reológico, enquanto que nos outros valores de corrente se
verifica o comportamento não linear.
0.002
0.0018
velocidade(m/s)
0.0016
0.0014
0A
0.0012
0,25A
0.001
0,50A
0.0008
0,75A
0.0006
1A
0.0004
0.0002
0
51.99
61.99
71.99
81.99
91.99
101.99
111.99
121.99
força(N)
Figura 5.42 - Gráfico da velocidade por força.
No próximo capítulo é apresentada uma simulação com o objetivo de comparar
os resultados experimentas com os teóricos.
91
6 SIMULAÇÃO
A simulação é desenvolvida em um programa de modelagem dinâmica de
sistemas multicorpos chamado Universal Mechanism© (UM). Esse programa é
baseado em métodos numéricos e permite geração automática das equações de
movimento, análises numéricas além do tratamento dos resultados
O uso desse recurso é facilitador pois permite definir de maneira automática o
tensor de inércia e o centro de massa, a partir das especificações do material,
tamanho e geometria do objeto gráfico associado ao corpo.
Os modelos elaborados são baseados na configuração experimental 2 e 3. Os
perfis usados na montagem do experimento, de seção 45 x 45 mm e de material
Alumínio, são definidos dentro do UM. Como se trata de um perfil com ranhuras
internas se utiliza à relação de comprimento-peso do seu catálogo a fim de chegar no
valor do peso real do perfil utilizado.
Nas Figuras 6.1 e 6.2 são mostrados os modelos referentes às duas
configurações experimentais.
Figura 6.1 – Modelo da configuração experimental 2.
92
Figura 6.2 – Modelo da configuração experimental 3.
Os elementos em formato de mola são apenas elementos visuais e
representam o atuador pneumático e o amortecedor MR, não tendo nenhuma
característica mecânica de elemento mola.
O atuador, assim como o amortecedor MR, são modelados através das suas
equações matemáticas, permitindo assim o ajuste dos seus parâmetro para cada
simulação executada.
Na Figuras 6.3 e 6.4 são mostradas as suas interfaces de modelagem e de
simulação.
Figura 6.3- Interface de modelagem e programação do UM.
93
Figura 6.4 - Interface de simulação do UM.
A seguir são apresentados gráficos da comparação entre a modelagem
experimental e a simulação.
0,25A 1Hz
800
600
força(N)
400
200
experimento 2 0,25A 1Hz
0
-200 0
0.5
1
1.5
2
2.5
simulação UM
-400
-600
-800
tempo(s)
Figura 6.5 - Gráfico simulação x experimento config. 2 – 0,25A 1Hz E=16,18%.
94
0,75A 1Hz
600
400
força(N)
200
experimento 2 0,75A 1Hz
0
-200
0
0.5
1
1.5
2
2.5
simulação UM
-400
-600
-800
-1000
tempo(s)
Figura 6.6 – Gráfico simulação x experimento config. 2 – 0,75A 1Hz E=4,34%.
0,25A 3Hz
800
600
força(N)
400
200
experimento 2 0,25A 3Hz
0
-200 0
0.5
1
1.5
2
2.5
simulação UM
-400
-600
-800
tempo(s)
Figura 6.7 – Gráfico simulação x experimento config. 2 – 0,25A 3Hz E=4,82%.
força(N)
0,75A 3Hz
800
600
400
200
0
-200 0
-400
-600
-800
-1000
-1200
0.5
1
1.5
2
2.5
experimento 2 0,75A 3Hz
simulação UM
tempo(s)
Figura 6.8 – Gráfico simulação x experimento config. 2 – 0,75A 3Hz E=16,60%.
95
0,25A 1Hz
2000
1500
força(N)
1000
500
experimento 3 0,25A 1Hz
simulação UM
0
-500
0
0.5
1
1.5
2
2.5
-1000
-1500
tempo(s)
Figura 6.9 – Gráfico simulação x experimento config. 3 – 0,25A 1Hz E=5,46%.
força(N)
0,75A 1Hz
3000
2500
2000
1500
1000
500
0
-500 0
-1000
-1500
-2000
experimento 3 0,75A 1Hz
Seqüência2
0.5
1
1.5
2
2.5
tempo(s)
Figura 6.10 – Gráfico simulação x experimento config. 3 – 0,75A 1Hz E=9,09%.
0,25A 3Hz
600
400
força(N)
200
experimento 3 0,25A 3Hz
0
-200
0
0.5
1
1.5
2
2.5
simulação UM
-400
-600
tempo(s)
Figura 6.11 – Gráfico simulação x experimento config. 3 – 0,25A 3Hz E=9,17%.
96
0,75A 3Hz
600
400
força(N)
200
experimento 3 0,75A 3Hz
0
-200
0
0.5
1
1.5
2
2.5
simulação UM
-400
-600
tempo(s)
Figura 6.12 – Gráfico simulação x experimento config. 3 – 0,75A 3Hz E=5,26%.
Os resultados experimentais foram comparados com as curvas geradas pela
simulação e são satisfatórios. Entre os gráficos gerados experimentalmente, aqueles
que mais se aproximaram da simulação são os mais próximos do comportamento
ideal, isto é, as curvas que não sofreram influência de folga e vibrações entre os
componentes.
97
7 CONCLUSÃO E TRABALHOS FUTUROS
Os amortecedores MR tem um alto potencial para aplicações em sistemas de
controle de vibrações e de controle de movimento abrangendo assim diversas áreas
da engenharia.
A proposta deste trabalho foi analisar e obter a modelagem matemática,
através de uma abordagem experimental analisando para isso o seu comportamento
fenomenológico através de ensaios experimentais.
Como Bingham postulou o modelo para fluidos reológicos (comportamento não
newtoniano), essa foi a primeira razão para a utilização do seu modelo para o
amortecedor. A segunda foi devido as demais modelagens encontradas na literatura
(modelo de Gamota e Filisko, modelo de Bouc-Wen e o modelo de
Bouc-Wen
Modificado) usarem a modelagem de Bingham como base, e a partir dela adicionarem
mais parâmetros com a finalidade de melhor definir o comportamento do amortecedor.
Mas para isso aumentam o grau de complexidade do equacionamento, o que tornaria
uma abordagem apenas fenomenológica de grande dificuldade.
Como foi elaborado um trabalho experimental a escolha da primeira
configuração do ensaio se deu através do estudo dos trabalhos da área. As demais
configurações foram desenvolvidas pensando em testar o amortecedor em uma
situação próxima de uma aplicação (situação real), para com isso verificar seu
comportamento nessas condições.
Pode-se concluir que no caso ensaiado as suas curvas foram diferentes das
curvas observadas nos demais trabalhos da área.
A partir dos resultados foi observado que possíveis folgas e vibrações
decorrentes da movimentação experimental influenciam as medições. A obtenção de
parâmetros nessas condições permite obter valores para uma condição real, sujeita à
influência de fenômenos mecânicos, como vibrações e atrito, presentes em qualquer
mecanismo.
Com a finalidade de modelar os parâmetros da equação de Bingham, além das
três configurações montadas, foram formulados experimentos específicos visando a
determinação de cada parâmetro separadamente.
Foi descoberta uma variação dos valores dos parâmetros fc e f0 relacionada
com a posição da haste do amortecedor.
Além disso não foi notada uma variação nos valores dos parâmetros com a
mudança da freqüência de excitação, e sim com o valor da corrente de controle.
98
Pode-se observar que os valores obtidos experimentalmente são satisfatórios,
pois a sua variação ocorre de acordo com o funcionamento do amortecedor. Além
disso através da simulação pode-se testar os valores obtidos experimentalmente e se
conclui que os gráficos teóricos e experimentais são muito parecidos.
As bancadas experimentais apresentadas permitem a utilização em mais
estudos nessa área com esse mesmo amortecedor ou com outros modelos. As duas
configurações experimentais baseadas no pêndulo simples e no duplo, foram
pensadas visando um trabalho futuro de utilização do amortecedor em próteses
transfemurais ou em suspensão automotiva.
99
8 REFERÊNCIAS BIBLIOGRÁFICAS
ANG, W. L., LI, W. H. e DU, H., “Experimental and Modelling Approaches of a MR
Damper Performance Under Harmonic Loading”, Journal of The Institution of
Engineers, Vol. 44 Issue 4, Singapore, 2004.
ARAÚJO, A. G. N., ANDRADE, L. M., BARROS, R. M. L., “Sistema para Análise
Cinemática da Marcha Humana Baseado em Videogrametria”, Fisioterpia e
Pesquisa, vol 11, número 1, janeiro–abril, São Paulo, 2005.
BANKS, H. T., SMITH, C., WANG, Y., “Smart Material Structure. Modeling, Estimation
and Control”, Wiley-Masson, 1996.
BOMBARD, A.J.F., JOEKES, I., KNOBEL, M, “Avaliação de um Fluido MagnetoReológico em Amortecedor Protótipo, Magneto-Reômetro e Magnetômetro”,
SAE, 2000.
BUCKLEY, J.G., SPENCE, W.D., STEPHAN, E.S., “Energy Cost of Walking:
Comparision of Intelligente Prosthesis with Conventional Mechanism”, Arch Phys
Med Rehabll, Vol 78, 1997.
BURTON, S.A., MAKRIS N., KONSTANTOPOULOS, I., and ANTSAKLIS, P. J.,
“Modelling the Response of ER Damper: Phenomenology and Emulation" Journal
of Engineering Mechanics, vol. 122, pp. 897-906, 1996.
BUZATO, M. A. S., TRIBULATTO, E. C., COSTA, S. M., ZORN, W.G.M., “Amputados
de Membros Inferiores”, 2001.
CARLSON, J.D., “The Promise of Controllable Fluids.” Proc. of Actuator 94 (H.
Borgmann and K. Lenz, Eds.), AXON Technologie Consult GmbH, pp. 266–270,
1994.
CARLSON, J.D. and Weiss, K.D., “A Growing Attraction to Magnetic Fluids,” Machine
Design, August, pp. 61–64, 1994.
CARLSON, J.D., Catanzarite, D.M. and St. Clair, K.A., “Commercial MagnetoRheologicalFluid Devices,” Proceedings of the 5th International Conference on
ER Fluids, MR Fluids and Associated Technology, U. Sheffield, UK., 1995.
CARLSON, J.D. and CHRZAN, M.J., U.S. Patent #5,277,281, “Magnetorheological
Fluid Dampers,” 1994.
CARLSON, J.D. CHRZAN, M.J., and JAMES, F.O., U.S. Patent #5,398,917,
Magnetorheological Fluid Devices”, 1995.
CARLSON, J.D. e JOLLY, M.R., “MR-fluid - Foam and Elastomer Devices”,
Mechatronics 10, p. 555.569, 2000.
100
CARLSON, J. D., MATTHIS W., E TOSCANO, J. R., “Smart Prosthetic Based On
Magnetorheological Fluids, Industrial and Commercial Applications of Smart
Structures Technologies”, Proc.of SPIE 8th Annual Symp. On Smart Structures
and Materials, Newport Beach, March 5-8, Vol. 4332, 308-316, 2001.
CARVALHO, J. A., “Amputações de Membros Inferiores”, Editora Manole, São Paulo,
2003.
CARRERA, I.M., “2nd Generation MagneShockTM Technical Data and Description”,
Disponível em:<http://carrerashock.com/MSGen2TechData.htm>. Acessado em
12 de setembro de 2008.
CHO, S., JUNG, H., LEE, I., “Smart Passive System Based on Magnetorheological
Damper”, Journal of Smart Material and Structures, 2005.
COUCH, N. P., DAVID, J. K., TILNEY, N. L., CRANE, C., “Natural History of the Leg
Amputee”, 1977.
CUNHA-CRUZ, V. C. V. S, ESILVA, F. L., DUTRA, M. S., “Haptics Devices for Medical
Robots: Model and Control”. In: 17th International Congress of mechanical
Engineering, São Paulo, 2003.
DEIVYS, E., “Estudo de Suspensões Passiva, Semi-ativa MR e Ativa”, Dissertação de
Mestrado, UFI, Itajubá, 2003.
EHRGOTT,
R.C.
and
MASRI,
S.F.
“Structural
Control
Applications
of
an
Electrorheological Device.” Proceedings of the International Workshop on
Structural Control, USC Publication Number CE-9311, pp. 115-129, 1994.
EHRGOTT, R.C. and MASRI, S.F. “Modelling the Oscillatory Dynamic Behavior of
Electrorheological Materials in Shear", Smart Material and Structures, vol. 1, pp.
275-285, 1992.
ESILVA, F. L., “Estudo para o Desenvolvimento de uma Prótese Transfemoral”, Tese
de Mestrado, COPPE/UFRJ, Rio de Janeiro, 2007.
EXCEL SENSORES, “Especificação Técnica - Célula de Carga MS-200”, Disponível
em URL: www.excelsensor.com, acessado em 10.06.2007.
FRAWLEY, D., “The Rig Veda and the History of India”, Nova Deli, 2001.
GAMOTA, D.R. and FILISKO, F.E. “Dynamic Mechanical Studies of Electrorheological
Materials: Moderate Frequencies.” Journal of Rheology, Vol. 35, pp. 399–425,
1991.
GENÇ, S., “Synthesis and Properties of Magnetorheological Fluids”, Tese de
Doutorador, School of Engineering of University of Pittsburgh, Pittsburgh, 2002.
GHANDI, M. V., THOMPSON, B. S., “Smart Materials and Structure”, Michigan:
Chapman & Hall, 1992.
101
IN MOTION, “A Publication of the Amputee Coalition of America”, Volume 9, Issue 3,
May-June
1999,
disponível
em
URL:
http://www.amputee-
coalition.org/inmotion/may_jun_99/hitech.html, acessado em 03.07.2007.
JOHNSON, E. A., RAMALLO, J. C., SPENCER JR., B. F., e SAIN, M. K., “Intelligent
Base Isolation Systems”, Proc. of the Second World Conference on Structural
Control, Kyoto, Japan, 1998.
JOSHI, D.,ANAD,S., “Smart and Adaptive Lower Limb Prosthesis”, 2005.
KAMATH, G.M., and WERELEY, N.M. “A Nonlinear Viscoelastic-Plastic Model for
Electrorheological Fluids”, Smart Materials and Structures, vol. 6, no. 3, pp. 351358, 1997.
KIM, J. K., OH., J. H., “Development of an Above-knee Prosthesis using MR Damper
and leg Simulator”, In: proceedings of the 2001 IEEE International Conference on
Robotics e Automation, Seoul, Korea, May 21-26, pp 3686-3691, 2001.
KO,J.M.,NI,Y.Q.,CHENM,Z.Q.,SPENCER,B.F., “Implementation of MR Dampers to
Dpongting Lake Bridge for Cable Vibration Mitigation”, In: World Conference on
Structural Control, Jonh Wiley &Sons, 2003, v.3, p. 767-775.
LAI, C. Y., LIAO, W. H., “Vibration Control of a Suspension System via a
Magnetorheological Fluid Damper”, 2001.
LAUWERYS, C., SWEVERS, J. E SAS, P., “Linear Control of Car Suspension Using
Nonlinear Actuator Control”, Proceedings do ISMA2002 - VOLUME I,
Internacional Simposio de M.A., Leuven-Bélgica, 2002.
LIMA, A.,S.,DUTRA, M., PINTO,F.,A.,N., C.,.LENGERKE,O.,”Estúdio Y Modelamiento
Experimental de Un Actuador Magneto Reológico”, V Congresso Internacional de
Ingeniería Mecânica – CIMM 2011, Colômbia, 2011.
LIMA, A.,S.,DUTRA, M., PINTO,F.,A.,N.,C., PINA-FILHO,A.,C.,P,”A Kinematic and
Dynamic Study of the Lower Limb”, 21 Brazilian Congress of Mechanical
Engineering - COBEM, Brasil, 2011.
LIMA,A.,S.,DUTRA,M.,PINTO,F.,A.,N.,C.,PINA-FILHO,A.,C.,P.,.“BancadaExperimental
para Avaliação de Parâmetros de Amortecedores Magneto-Reológicos”, VI
Congresso Nacional de Engenharia Mecânica - CONEM, Brasil, 2010.
LIMA,A.,S.,DUTRA,M.,PINTO,F.,A.,N.,C.,”Bancada Experimental para Amortecedor
Magneto-Reológico Usando LabVIEW”, The Academic NI Day, Brasil, 2010.
LIMA,A.,S.,DUTRA,M.,PINTO,F.,A.,N.,C,”Sistema de Controle e Monitoramento de
uma Bancada Experimental para Amortecedor Magneto-Reológico”, Nono
Simpósio de Mecânica Computacional, Brasil, 2010.
LORD CORPORATION, “Engineering Notes”, Disponível em URL: www.lord.com,
acessado em 15.08.2007.
102
LORD CORPORATION,
“MR DP 1005-3
-
Catalog”,
Disponível em
URL:
www.lord.com, acessado em 15.08.2007.
MAKRIS, N., BURTON, S.A., HILL, D. and JORDAN, M. “Analysis and Design of an
Electrorheological Damper for Seismic Protection of Structures”, Journal of
Engineering Mechanics, ASCE, 1996.
MCCLAMROCH, N.H. and GAVIN, H.P. “Closed Loop Structural Control Using
Electrorheological Dampers”, Proceedings of the American Control Conference,
Seattle, Washington, pp. 4173–4177, 1995.
MCGINNIS, P. M., “Biomechanics of Sport and Exercise”, Human Kinetics, USA, 2002.
MEDINA, J., MARICHAL, M., MORALES, S., “Desarrollo de dos Modelos Inversos de
un Amortiguador Magneto-Reológico para El Control de Vibraciones en
Estructuras Civiles”, Boletin Tecnico IMME, Volume 46, nº2, Venezuela, 2008.
MGPOC - MANUEL GARCIA PROSTHETIC AND ORTHOTIC CENTERS, disponível
em URL: http://www.mgpoc.com/services.htm, acessado em 15.07.2007.
OK, S., KIM, D., PARK, K., KOH, H., “Semi-active Fuzzy Control of Cable-stayed
Bridges Using Magnetorheological Damper”, Enginnering Structures, vol. 29, pp
776-788, 2007.
ORTHOPAEDIC ALLIANCES ATLAS, “Historical Development of Artificial Limbs”,
AAOS, 1960.
OTTO BOCK, Catálogo, disponível em URL: http://www.ottobock.com, acessado em
24.10.2007.
PONS, J. L., “Emerging Actuator technologies: A Micromechatronics Approach”,
England, John Wiley 7 Sons, 2005.
PORTER, R., “Cambridge - História da Medicina”, Editora Revinter, Rio de Janeiro,
2008.
POYNOR, J. C., “Innovative Designs for Magneto-Rheological Dampers", Tese de
mestrado, Virginia Polytechnic Institute and State University, Virginia, 2001.
ROBINSON, K. P.,”Historical Aspects of Amputation. Annals of the Royal College of
Surgeons of England”, v. 73, pp. 134-136, 1991.
SHAMES, I. H. e COZZARELLI, F. A. “Elastic and Inelastic Stress Analysis”, PrenticeHall, 1992.
SOBOTTA, J., “Atlas de Anatomia Humana”, Editora Guanabara Koogan, São Paulo,
2001.
SPENCER JR., B.F., DYKE, S.J, SAIN, M.K. e CARLSON, J.D. “Phenomenological
Model of a Magnetorheological Damper”, ASCE, Journal of Engineering
Mechanics, vol. 123, no. 3, pp. 230-238, 1996.
103
SPENCER JR., B.F., DYKE, S.J., e SAIN, M.K., “Magnetorheological Dampers: a New
Approach to Seismic Protection of Structures”. Proc. of Conference on Decision
and Control, Kobe, Japan, pp. 676-681, 1996.
STANWAY, R,. SPROSTON, J.L. and STEVENS, N.G. “Non-linear Modelling of an
Electro-rheological Vibration Damper.” J. Electrostatics, Vol. 20, pp. 167–184,
1987.
STANWAY, R. SPROSTON, J.L. and STEVENS, N.G. “Non-linear Identification of an
Electrorheological Vibration Damper.” IFAC Identification and System Parameter
Estimation, pp. 195–200, 1985.
STEFFEN JR., V., RADE, D.A., “Fundamentos e Aplicações de materiais Inteligentes”,
In: Proceedings of the 3rd Copngresso Temático de Dinâmica e Controle da
SBMAC, May 31st – June 3rd, Uberlândia, Brasil, 2004.
STUTZ, L. T., “Síntese e Análise de uma Suspensão Semi-Ativa Magneto Reológica
Baseada na Abordagem de Controle com Estrutura Variável, Rio de Janeiro,
2005.
SUNAKODA, K., SODEYAMA, H., IWATA, N., FUJITANI, H., e SODA, S., “Dynamic
Characteristics of Magnetorheological Fluid Damper”. Proc. of SPIE Smart
Structures and Materials Conference, Newport Beach, CA, pp. 194-203, 2000.
VILLARREAL, K.A., “Effects pf MR Damper Placement on Structure Vibration
Parameters”, Tokio University, 2005.
VIOTA, J.L., DURAN, J.D.G., GONZALEZ-CABALLERO, F., DELGADO, A.V.,
“Magnetic Properties of Extremely Bimodal Magnetite Suspensions”, Journal of
Magnetism and Magnetic Materials, pag. 80-86, 2007.
TUSSET, A.M., “Controle Ótimo Aplicado em Modelo de Suspensão Veicular NãoLinear Controlada Através de Amortecedor Magneto-Reológico”, Tese de
Doutorado, UFRS, Porto Alegre, 2008.
YANG, G., “Large-Scale Magnetorhological Flud Damper for Vibration Mitigation:
Modeling, Testing and Control”, Tese de Doutorado, Notre Dame, Indiana, USA,
2001.
YANG, G., SPENCER-JR., B. F., CARLSON, J. D., e SAIN, M. K., “Large-Scale MR
Fluid
Dampers:
Modelling
and
Dynamic
Performance
Considerations",
Engineering Structures, vol. 24, pp. 309-323, 2002.
YAO, G.Z., YAP,F.F.,CHEN,G.,LI,W.H.,YEO,S.H.,”MR Damper and Its Application for
Semi-active Control of Vehicle Suspension System”, Journal of Mechatronics, p.
963-973, 2001.
WEN, Y.K. “Equivalent Linearization for Hysteretic Systems Under Random Excitation,"
Trans. of the ASME, Journal of Applied Mechanics, vol. 47, pp. 150-153,1980.
104
WEN, Y.K., “Method of Random Vibration of Hysteretic Systems”. Journal of
Engineering Mechanics Division, ASCE, Vol. 102, No. EM2, pp. 249–263, 1976.
WILSON, A. B. Jr. “History of Amputation Surgery and Prosthetics”, Atlas of Limb
Prosthetics: Surgical and Prosthetic Principles. American academy of orthopedic
sugeons, C.V. Mosby Company, St Louis, 1981.
105
Baixar