Capítulo 2 - Modelação
CONTROLO
1º semestre – 2011/2012
Transparências de apoio às aulas teóricas
Cap 2 – Modelação de Sistemas Físicos
Maria Isabel Ribeiro
António Pascoal
Revisão: Outubro de 2011
Todos os direitos reservados
Estas notas não podem ser usadas para fins distintos daqueles para que foram
elaboradas (leccionação no Instituto Superior Técnico) sem autorização dos autores
Capítulo 2 - Modelação
Objectivos
• Definir o que é um modelo e discutir o seu uso para
responder a perguntas sobre sistemas físicos
• Introduzir os conceitos de entrada, saída e dinâmica
• Dar exemplos de modelos de sistemas físicos em
domínios diversos
• Linearização
Referências
o Cap.2 – do livro de Franklin, Powel, Naemi (referência principal)
o Cap.2 - do texto de Karl Astrom, Richard Murray, disponível na
Web.
Capítulo 2 - Modelação
Revisão sobre Introdução ao Controlo
Actuação
Sistema
físico
Sensoriamento /
Percepção
Controlo =
= Sensoriamento +
Computação +
Actuação
Computação
Sistemas de controlo por retroaçcão ocorrem em muitos domínios
Objectivos do controlo
• Modificar o comportamento de sistemas
com as seguintes restrições:
Estabilidade em cadeia fechada
Robustez face a incertezas de modelização
Atenuação de perturbações
Capítulo 2 - Modelação
Modelos
• Modelo = representação matemática de um sistema físico, biológico,
mecânico, de informação, ...
• Um modelo fornece uma predição de como é o comportamento do
sistema
• O projecto de controladores para sistemas físicos faz-se a partir de um
modelo desse sistema. Os modelos não têm que ser exactos.
– Modelos que descrevam muito detalhadamente um sistema podem ser complexos
– Desconhecem-se todos os fenómenos físicos que regulam o comportamento do sistema
– Na modelação fazem-se, muitas vezes, hipóteses simplificativas
• A retroacção garante robustez a incertezas (em determinados limites) no
modelo
• Os modelos usados para controlo relacionam entradas com saídas e
(eventualmente) com variáveis internas do sistema
Capítulo 2 - Modelação
Modelos
• O modelo que se deriva depende da pergunta a que se
pretende responder sobre o sistema físico.
– Perguntas diferentes modelos diferentes
– Perguntas iguais mas hipóteses simplificativas diferentes modelos
diferentes
• Ao mesmo sistema físico podem corresponder modelos
diferentes
• Devem ser escolhidas escalas de tempo e de espaço
adaptadas às questões a que se pretende responder
Capítulo 2 - Modelação
Modelo
• De entrada-saída – relaciona directamente a entrada com a
saída
• Equação diferencial
• Linear ou não linear
• Variante ou invariante no tempo
• Função de Transferência
• Só para sistemas lineares invariantes no tempo
• De estado – relaciona a entrada, a saída e variáveis internas do
sistema
r(t)
y(t)
Sistema
Entrada
Saída
Capítulo 2 - Modelação
Modelação: Exemplos
Alguns exemplos de sistemas físicos
– Sistemas mecânicos
– Circuitos eléctricos
– Sistemas electromecânicos
– Sistemas térmicos
– Sistemas hidráulicos
– Dinâmica de populações
– ......
Capítulo 2 - Modelação
Sistema de Controlo de Velocidade (Cruise Control)
vref(t)
+
_
Controlador
f(t)
Motor
v(t)
f(t)
Sensor de
velocidade
• Objectivo do sistema de controlo
– Manter constante a velocidade do veículo
• Modelo do sistema físico
– Entrada: força f(t) gerada pelo motor
– Saída: velocidade v(t) do automóvel
f(t)
v(t)
• Qual é o modelo matemático deste sistema
físico que relaciona f(t) com v(t) ?
• Fazendo hipóteses simplificativas obtem-se
um modelo.
Capítulo 2 - Modelação
Sistemas Mecânicos de Translação
Lei de Newton (séc. XVII)
F= d(mv)/dt
F = soma das forças aplicadas ao corpo (N)
v = vector velocidade do corpo (m/s)
M = massa do corpo (Kg)
mv= momento linear Kgm/s
A força total aplicada a um corpo rígido é igual à
derivada em ordem ao tempo do seu momento
linear
Capítulo 2 - Modelação
Sistemas Mecânicos de Translação
Elementos Básicos
• Massa
X
m
f(t)
• Mola
X
d2 x( t )
f (t ) m
dt 2
Massa - Armazena energia
cinética
Mola - Armazena energia
potencial
K
K=constante da mola
K
K x( t )
fs (t )
fs (t ) K x(t )
fs(t) = força de restituição da mola,
resultado de uma deformação
(alongamento ou compressão).
Kx(t) é a força que é necessário
exercer para efectuar o
alongamento (x(t)>0) ou a
compressão (x(t)<0).
Capítulo 2 - Modelação
Sistemas Mecânicos de Translação
Elementos Básicos
• Atrito
d x( t )
fd ( t )
dt
X
Atrito - Elemento dissipador de energia
b
x(t)
X
b
fd (t )
dx( t )
dt
b=coeficiente de atrito viscoso
A força de atrito, fd(t), que se opõe ao
movimento, é proporcional à velocidade
• simplificação da realidade
• é usualmente uma função não linear da
velocidade
Capítulo 2 - Modelação
Sistema de Controlo de Velocidade (Cruise Control)
f(t)
Hipóteses simplificativas:
• Inércia rotacional das rodas
é desprezável
• O atrito que se opõe ao
movimento é proporcional à
velocidade (atrito viscoso)
• O automóvel move-se no
plano horizontal
v(t)
Qual é o modelo matemático deste
sistema físico que relaciona f(t) com v(t)
assumindo as hipóteses simplificativas ?
Força externa
aplicada
m
f(t)
f(t)
v(t)
Sistema
d x( t )
dt
Capítulo 2 - Modelação
Sistemas Mecânicos de Translação
Exemplo de 1ª Ordem
Lei de
Newton
m
f(t)
Força externa
aplicada
d2 x( t )
dv( t )
forçasaplicadas m
m
dt 2
dt
f(t)
v(t)
Sistema
d x( t )
dt
f ( t ) fd ( t ) f ( t ) v( t ) m
Força externa
Força do atrito
A força de atrito opõe-se
ao movimento
• Representação de entrada-saída
o no domínio do tempo
o entrada: f(t)
o saída: v(t)
o Equação diferencial linear de
coeficientes constantes de 1ª ordem
o Sistema de 1ª ordem
m
dv( t )
v( t ) f ( t )
dt
dv( t )
dt
Capítulo 2 - Modelação
Sistemas Mecânicos de Translação
Exemplo de 2ª Ordem
Lei de
Newton
m
f(t)
Força externa
aplicada
d2 x(t)
forçasaplicadas m
dt 2
f(t)
x(t)
Sistema
dx(t)
d2 x(t)
f(t) fd (t) f(t) β
m
dt
dt 2
Força externa
Força do atrito
A força de atrito opõe-se
ao movimento
• Representação de entrada-saída
o no domínio do tempo
o entrada: f(t)
o saída: x(t)
o Equação diferencial linear de
coeficientes constantes de 2ª ordem
o Sistema de 2ª ordem
d2 x(t)
dx(t)
m
β
f(t)
2
dt
dt
Capítulo 2 - Modelação
Sistemas Mecânicos de Translação
Exemplo de 2ª Ordem
K
m
dx( t )
dt
Kx(t )
f(t)
f(t)
Sistema
x(t)
Força
externa
aplicada
d2 x( t )
forças aplicadas m
dt 2
dx( t )
d2 x( t )
f (t)
Kx( t ) m
dt
dt 2
d2 x( t )
dx( t )
m
Kx( t ) f ( t )
dt 2
dt
Capítulo 2 - Modelação
Função de Transferência
m
dv( t )
v( t ) f ( t )
dt
EQUAÇÃO DIFERENCIAL - Representação matemática do
sistema no domínio do tempo
• para uma dada entrada
• a saída pode obter-se por resolução da equação
diferencial
Aplicando Transformada de Laplace unilateral e considerando
condições iniciais nulas
msV(s) V(s) F(s)
V(s) TL [ v( t )]
F(s) TL [ f ( t )]
X(s) x( )e s d Transformada de Laplace
unilateral
0
1
V ( s)
F(s) ms
FUNÇÃO DE TRANSFERÊNCIA - Representação matemática
do sistema no domínio da variável complexa s
Capítulo 2 - Modelação
Função de Transferência
r(t)
FUNÇÃO DE TRANSFERÊNCIA
y(t)
SLIT
Quociente da transformada de Laplace do sinal de
saída pela transformada de Laplace do sinal de
entrada considerando nulas as condições iniciais
Y(s)
G(s)
R(s) c.i.0
R(s)
Y(s)
G(s)
Para condições iniciais nulas
Y(s) G(s).R(s)
• A função de transferência é um conceito potente para descrever o
comportamento de sistemas do ponto de vista de entrada/saída
• Para SLITs, a função de transferência caracteriza completamente o
sistema do ponto de vista de entrada-saída
Capítulo 2 - Modelação
Função de Transferência
r(t)
y(t)
SLIT
Obtenção da solução da equação diferencial que
é a representação do comportamento de
entrada-saída
r(t)
Resolução da eq.diferencial
y(t)
TL
Y(s)
G(s)
R(s) c.i.0
R(s)
Y(s)
G(s)
TL-1
R(s)
Y(s)
Y(s) G(s).R(s)
Se as condições iniciais forem nulas
A função de transferência é um conceito potente
para descrever o comportamento de sistemas do
ponto de vista de entrada/saída
Capítulo 2 - Modelação
Função de Transferência e Diagrama de Blocos
m
f(t)
v(t)
dv( t )
v( t ) f ( t )
dt
1
V ( s)
F(s) ms
F(s)
f(t)
x(t)
F(s)
F(s)
O mesmo sistema físico
Modelos diferentes
1
ms β
1
ms β
1
s(ms β)
mx(t) βx (t) f(t)
V(s)
V(s)
1
s
X(s)
X(s)
Capítulo 2 - Modelação
Cruise Control (em plano horizontal)
f(t)
v(t)
Sistema físico
modelo do sistema físico
Vref(s)
+
K
_
V(s)
?
Vref (s)
F(s)
1
ms β
V(s)
Sistema controlado
com controlador
proporcional
controlador
Capítulo 2 - Modelação
Sistemas Mecânicos de Rotação
rotação em torno de um eixo
• Lei de Newton-Euler
d2θ(t)
T(t) J
dt 2
T = soma dos binários aplicados ao sistema (N-m)
d2θ(t) = vector aceleração angular a que o corpo está sujeito (rad/s2)
dt 2
J = momento de inércia (Kg-m2) (suposto constante)
A soma dos binários que actuam num corpo
é igual ao produto do momento de inércia
desse corpo pela sua aceleração angular.
Capítulo 2 - Modelação
Sistemas Mecânicos de Rotação
Elementos Básicos
• Inércia
d2θ(t)
d
T(t) J
J
2
dt
dt
- Velocidade angular
Armazena energia cinética rotacional
• Mola Rotacional
Ts (t) K θ(t)
Mola armazena energia potencial rotacional
K = constante da mola
Ts(t) = binário de restituição da mola em resultado de
uma deformação em torno do ponto de equilíbrio.
K θ(t) é o binário que é necessário exercer para
efectuar a rotação.
Capítulo 2 - Modelação
Sistemas Mecânicos de Rotação
Elementos Básicos
• Atrito Rotacional
Td (t) β ω(t)
Atrito - Elemento dissipador de energia
b - coeficiente de atrito viscoso
O binário de atrito Td(t), que se opõe ao
movimento, é proporcional à velocidade angular
• simplificação da realidade
• é usualmente uma função não linear da velocidade
Capítulo 2 - Modelação
Sistemas mecânicos de rotação
Engrenagem (caixa de desmultiplicação)
Roda dentada 1 – entrada
Roda dentada 2 – saída
Raio -
r
1
Raio -
# dentes -
N
1
r
2
# dentes -
N
A velocidade linear é igual no ponto de
contacto das duas rodas
a desmultiplicação angular é
inversamente proporcional ao
quociente do número de dentes.
r r
11 2 2
2 r1 N 1
1 r2 N 2
2
Capítulo 2 - Modelação
Sistemas mecânicos de rotação
Engrenagem (caixa de desmultiplicação)
Roda dentada 1 – entrada
Roda dentada 2 – saída
Raio -
r
1
Raio -
# dentes -
N
1
r
2
# dentes -
N
2
Supondo que a engrenagem não
acumula nem dissipa energia
T T
11 2 2
a “multiplicação” de binário é directamente
proporcional ao quociente do número de dentes
das rodas.
T2 1 N 2
T1 2 N 1
Resumo
1
N1
N2
2
T1
N2
N1
T2
Energia rotacional
Capítulo 2 - Modelação
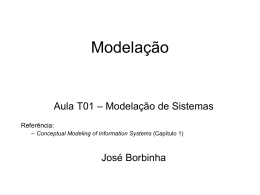
Exemplo: Pêndulo
Pêndulo
Tc (t)
Massa toda concentrada na extremidade
Braço de comprimento L [m]
Binário aplicado Tc(t) [N.m]
L
θ
m
Pergunta:
Como varia o ângulo (t) como função de Tc(t)?
mg
Momento de inércia em torno do ponto de rotação = J = mL2
(t) binários aplicados
Jθ
θ
(t) T (t) - mg L sin
mL2θ
c
(t) g sinθ Tc (t)
θ
L
mL2
• Eq. Diferencial não linear
• Não se pode obter directamente a
Função de Transferência
• Faz-se linearização
mgcos
θ
mg
mgsin
Capítulo 2 - Modelação
Carro com pêndulo invertido
M
Massa do carro
m
Massa do pêndulo
b
Coeficiente de atrito no movimento do carro
L
Comprimento do pêndulo
I
Inércia do pêndulo
F
Força externa aplicada ao carro
x
Posição do carro
Ângulo do pêndulo relativamente à vertical
Pretende-se: Equações da dinâmica de movimento do sistema em termos de x e de
http://www.engin.umich.edu/group/ctm/examples/pend/invpen.html
Capítulo 2 - Modelação
Carro com pêndulo invertido
Soma das forças no referencial horizontal associado ao carro
Mx bx N F
N = força de reacção (desconhecida)
aplicada pelo pêndulo
Soma das forças no pêndulo na direcção horizontal
cosθ mL θ 2sinθ
N mx mL θ
cosθ mL θ 2sinθ F
(M m) x bx mL θ
Capítulo 2 - Modelação
Carro com pêndulo invertido
Soma das forças perpendiculares ao pêndulo
mxcosθ
Psinθ Ncosθ mgsinθ mL θ
Soma dos momentos em torno do centróide do pêndulo
PLsinθ NLcosθ Iθ
mgLsinθ mLxcosθ
(I mL2 )θ
Capítulo 2 - Modelação
Carro com pêndulo invertido
cosθ mL θ 2sinθ F
(M m) x bx mL θ
mgLsinθ mLxcosθ
(I mL2 )θ
Sistema de equações diferenciais não lineares
Capítulo 2 - Modelação
Sistemas Electromecânicos
Motor de corrente contínua
Parâmetros característicos:
Ra - resistência – Ohm
La - indutância – Henry
ea - tensão de entrada no circuito da armadura –
Volt
ia - corrente no circuito da armadura - Ampere
vb - força contra-electromotriz – Volt
Tm – binário disponível no veio do motor
Capítulo 2 - Modelação
Motor de corrente contínua
O rotor gira num campo magnético
vb Kb
dθm (t)
K bωm (t )
dt
Equação do circuito da armadura
dia
R a ia L a
v b (t) ea
dt
tensão aos terminais da
resistencia
queda de tensão
na bobina
Força contra-electromotriz
tensão de entrada no
estator
Forca contra-electromotriz
RaIa (s) LasIa (s) Vb (s) Ea (s)
Ea(s) +
_
Vb(s)
1
Ra L a s
Ia(s)
sKb
Qm(s)
Capítulo 2 - Modelação
Motor de corrente contínua
Binario acessível no veio do motor
Tm (s) K tIa (s)
Tm K tIa
Tm (s)
Ia (s)
Kt
(proporcional a ia; Kt=Kb)
Ea(s)
+
_
1
Ra L a s
Vb(s)
Ia(s)
Tm(s)
Kt
sKb
(Ra Las)Tm (s)
K bsΘm (s) Ea (s)
Kt
termos em Tm
termo em m
Qm(s)
Capítulo 2 - Modelação
Motor de corrente contínua
Equação do ROTOR
JmsΩm (s) βmΩm (s) Tm (s)
m (s) TL[m (t )]
(Jms2 βms)Θm (s) Tm (s)
Ea(s)
+
_
1
Ra L a s
Ia(s)
Kt
Tm(s)
1
s(sJm m )
Vb(s)
sKb
Por reduções sucessivas do diagrama de blocos, obtenha a
função de transferência do motor.
Qm(s)
Capítulo 2 - Modelação
Motor de corrente contínua
(Ra Las)Tm (s)
K bsΘm (s) Ea (s)
Kt
(Jms2 βms)Θm (s) Tm (s)
(Ra Las)(Jms2 βms)
Θm (s) K bsΘm (s) Ea (s)
Kt
Se La puder ser desprezada (em comparação com Ra)
Ra
(Jm s βm ) K b sΘm (s) E a (s)
Kt
Θm (s)
K
Ea (s) s(s a)
K t /(Ra Jm )
Θm (s)
Ea (s) s[s 1 (β K tK b )]
m
Jm
Ra
Função de TRANSFERÊNCIA da forma
Controlo de posição de um motor de
corrente contínua
Θm (s)
K
Ea (s) s(s a)
Ea(s)
K
(s a)
m(s)
Dinâmica da
velocidade angular
1
s
R(s)
K
Ea(s)
K
sa
Θm (s)
KK
G(s)
2
R(s) s sa KK
Qm(s)
Integrador
(posicao angular é o integral
da velocidade angular. Pólo
em zero!)
Sistema de controlo de posição angular do motor
+
_
Capítulo 2 - Modelação
1
s
Qm(s)
Capítulo 2 - Modelação
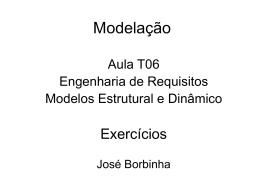
Dinâmica de condução de um robot móvel
YW
rodas motoras
( t )
y( t )
{R}
Pergunta:
Como variam no tempo a posição (x,y) e
orientação do veículo em função das
velocidades lineares das duas rodas ?
{W}
x( t )
XW
2 rodas motoras traseiras
2 rodas dianteiras não motorizadas
v (t) – velocidade linear da roda direita
d
v (t) v e (t)
x
(t) d
ve(t) – velocidade linear da roda esquerda
cos( (t))
2
L – distância entre rodas
v d (t) v e (t)
sin( (t))
y(t)
2
(t) v d (t) v e (t)
θ
Sistema de 3 equações diferenciais não lineares
L
Capítulo 2 - Modelação
Dinâmica de condução de um robot móvel
YW
rodas motoras
( t )
y( t )
{R}
{W}
Controlo:
Que valores devem ter ve(t) e vd(t)
para que o veículo siga um
determinado caminho?
x( t )
Coordenadas
do caminho a
seguir
XW
ve
Controlador
v (t) v e (t)
x
(t) d
cos( (t))
vd
2
v d (t) v e (t)
y
(t)
sin( (t))
2
É com base neste modelo do sistema físico (é um
v d (t) v e (t)
modelo simplificado) que se projecta o
θ(t)
L
controlador
(x,y,)
Capítulo 2 - Modelação
Linearização
Sistema não linear
Aproximação linear
Exemplo: carro a alta velocidade
f(t)
Força externa
aplicada
v(t)
m
f(t)
Velocidade elevada
Força de atrito: termo linear + termo quadrático
fd (t) β1v(t) β2v(t)2
dv(t)
f(t) β1v(t) β2 v(t) m
dt
2
Sistema não linear
Capítulo 2 - Modelação
Linearização: Exemplo
Sistema não linear
Aproximação linear em torno de
uma situação de equilíbrio
Condição de equilíbrio
• O que é uma situação de equilíbrio ?
• Se o sistema estiver numa situação de equilíbrio e não houver
nenhuma perturbação, ele mantém-se indefinidamente nessa situação
• O sistema está numa situação de equilíbrio quando uma força externa
iguala a força de atrito
f(t) β1v(t) β2 v(t) 2 m
dv(t)
dinâmica não linear
dt
Caracterização do equilíbrio
v(t) cte v e
dv(t)
0
dt
fe β1v e β2v e
2
fe β1v e β2v e 0
2
Os pares (ve, fe) que satisfazem esta relação
são pontos de equilíbrio do sistema
Capítulo 2 - Modelação
Linearização: exemplo
Estudo do comportamento do sistema em
torno de uma situação de equilíbrio
v(t) v e δv(t)
Incrementos pequenos em torno do equilíbrio
f(t) fe δf(t)
m
(ve, fe)
dv(t)
f(t) β1v(t) β2 v(t) 2
dt
d(v e δv(t))
m
(f e δf(t)) β1(v e δv(t)) β2 (v e δv(t)) 2
dt
Ve=cte.
linear
linear
???
dδv(t)
m
(f e δf(t)) β1(v e δv(t)) β2 ????
dt
Capítulo 2 - Modelação
Linearização: exemplo
v(t)2 (ve δv(t))2 ???
Apr. série de Taylor em torno do ponto de equilíbrio
desprezando os termos não lineares (ordem superior à 1ª)
v2
Apr. série de Taylor
ve
df
1 d2 f
f ( x) f ( x0 )
(x x0 )
dx x x 0
2 dx 2
v
v(t)2 ve 2veδv(t)
2
( x x 0 )2 ...
x x0
Desprezando termos de ordem superior
É válido para incrementos pequenos
dδv(t)
m
(f e δf(t)) β1(v e δv(t)) β2 (v 2e 2v eδv(t))
dt
Capítulo 2 - Modelação
Linearização: exemplo
dδv(t)
m
(f e δf(t)) β1(v e δv(t)) β2 (v 2e 2v eδv(t))
dt
fe β1v e β2v e
2
Condição de equilíbrio
dδv(t)
m
δf(t) β1δv(t) 2β2 v eδv(t)
dt
dδv(t)
m
(β1 2β 2 v e )v(t) δf(t)
dt
δV(s)
1
δF(s) [sm (β1 2β2 v e )]
Eq.
diferencial
linear
Função de
transferência
Capítulo 2 - Modelação
Linearização: exemplo
f(t)
Sistema não linear
f(t)
v(t)
m
dv(t)
β1v(t) β2 v(t) 2 f(t)
dt
m
dδv(t)
(β1 2β 2 v e )v(t) δf(t)
dt
v(t)
Sistema Linearizado
•Relaciona incrementos na saída com incrementos na entrada
•Os incrementos são em torno de um determinado ponto de equilíbrio (ve,fe)
A localização do
pólo depende da
velocidade de
operação ve
δV(s)
1
δF(s) [sm (β1 2β2 v e )]
Função de
transferência
Capítulo 2 - Modelação
Pêndulo: Linearização
(t) g sinθ Tc (t)
θ
L
mL2
Tc (t)
L
θ
Não linear devido ao termo sin
m
mg
θ 0, Tc 0 Ponto de equilíbrio do sistema
Para pequenos (pequenas perturbações em torno do ponto de equilíbrio)
sinθ θ
Modelo linear que descreve o
comportamento do sistema, mas só
para pequenos
(t) g θ Tc (t)
θ
L
mL2
Baixar