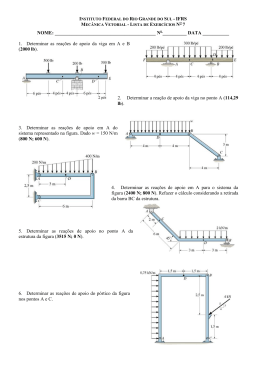
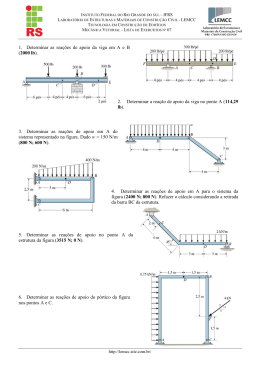
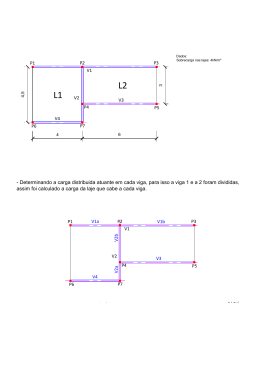
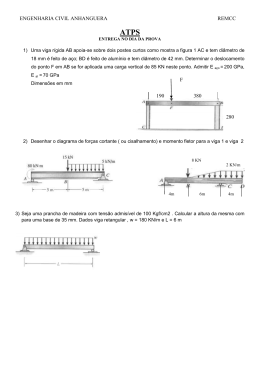
http://dx.doi.org/10.5540/DINCON.2011.001.1.0063 247 UM ESTUDO DAS OSCILAÇÕES NÃO LINEARES DE VIGAS ESPACIAIS Eulher C. Carvalho 1, Paulo B. Gonçalves 1, Zenon J. N. del Prado 2 1 Departamento de Engenharia Civil, Pontifícia Universidade Católica do Rio de Janeiro, Rio de Janeiro, Brasil, [email protected] 2 Escola de Engenharia Civil, Universidade Federal de Goiás, Goiânia, Brasil, [email protected] Resumo: As equações não lineares integro-diferenciais ordinárias que descrevem o movimento tridimensional de uma viga inextensível engas tada-livre, sujeita a excitação harmônica lateral, são aprese ntadas neste trabalho. Aplicando-se o método de Galerkin, as equações de movimento são di scretizadas e usadas pa ra investigar as oscilações não lineares e i dentificar os tipos de bifurcações associados com seu movimento. indeformada, os eixos ξ e X são coincidentes e os eixos η e ζ são paralelos aos eixos Y e Z, respectivamente. O sistema é solicitado na di reção material Y por um a carga harmônica distribuída Qv(s, t) = qv(s) cos(Ω t), onde Ω é a frequência de vibração da excitação. Palavras-Chave: Oscilações não lineare s, equações de movimento tridimensionais, vigas, aplicação da teoria de bifurcações. 1. INTRODUÇÃO As equações que descrevem o movimento não linear tridimensional de uma viga inextensível foram formuladas e apresentadas, pela primeira vez, por Crespo da Silva e Glynn [1, 2]. Destes tra balhos seguiram-se outros, contemplando diferentes aspectos intrínsecos ao movimento não linear da viga. Crespo da Silva e Glynn [3], por exemplo, estudaram as oscilações de uma viga tridimensional com condições de contorno simétricas. Em adição, Pai e Nayfey [4, 5, 6] formularam equações de movimento similares às de C respo da Silva e Glynn [1] para vigas compostas e Aghababaei et al. [7] para vigas com imperfeições geométricas iniciais. Exemplo de pesquisas m ais recentes sobre dinâmica de vigas engastada-livres podem ser encontradas em Zhang [8], Yao e Zhang [9], Zhang et al. [10], Lee et al. [11] e Zhang et al. [12], os quais principiam seus trabalhos pelas equações de movimento formuladas por Crespo da Silva e Glynn [1]. 2. SISTEMA DINÂMICO Considere-se, pois, uma viga uniforme, homogênea, inextensível, inicialmente reta, de material linear isotrópico, de comprimento L e massa por unidade de comprimento m. Um segmento deformado da viga, de c omprimento s, é mostrado na Fig. 1. Na Fig. 1, os eixos (X, Y, Z) formam o sistema de referência material, enquanto (ξ, η, ζ ) são os eixos principais da viga na p osição s. Na confi guração Fig. 1. Sistema dinâmico Cada seção transversal da viga pode sofrer um deslocamento elástico medido no seu centróide C, bem como, uma rotação φ (s, t) em torno de ξ. Em qualquer instante de tempo t, as componentes do vetor de deslocamentos elásticos u (s, t), v (s, t) e w (s, t) podem ser descritas por meio das equações de movimento. 3. EQUAÇÕES DE MOVIMENTO As equações não l ineares que governam o movimento tridimensional de um a viga são ap resentadas nas E qs. (1), (2) e (3). Detalhes desta fo rmulação podem ser encontrados em Crespo da Silva [13]. Para simplificar a notação, nas Eqs. (1), (2) e (3) faz-se u=u(s, t), v=v (s, t) e w=w(s, t). Nas m esmas equações, o sobrescrito ' (aspa sim ples) simboliza derivada parcial em relação ao comprimento de arco s e o s obrescrito • (ponto) simboliza derivada parcial com relação ao tempo t. Os parâmetros Dξ e Jξ são, re spectivamente, a rigidez e o momento de inércia à torção da viga. Por sua vez, Dη e Dζ são as rigidezes à flexão da vi ga e Jη e Jζ são os momentos de inércia a rotação da viga. As rigidezes da viga também aparecem nas razões βy =Dζ /Dη e βγ =Dξ /Dη. 248 Um Estudo das Oscilações Não Lineares de Vigas Espaciais Paulo B. Gonçalves, Eulher C. Carvalho, Zenon J N del Prado •• • ″ m v + cv v + β y Dη v′′ = − Dη β γ γ ′w′′ + Dη 1 − β y ) { ) s ⎡(w′′γ )′ − γ 2 v′′ ′ + w′′′ v′w′′ds ⎤ − D β v′ v′′ 2 + w′′ 2 ⎥ η y ∫ ⎢⎣ 0 ⎦ ) ( ( ( ) ( [ •• •• + v′ − Dη β y v′v′′′ − Dη w′w′′′ + J ζ v ′v′ + Jη w ′ w′ − s ∫ L •• ⎛ ⎡s ⎞ ⎤ ⎜ m v′ 2 + w′ 2 ds ⎤ ⎟ ds ⎥ + J ⎢ ⎥ ξ ⎜ ∫ ⎟ ⎦ ⎠ ⎥⎦ ⎝ ⎣0 ( ) • ⎤• ⎡ − w ′v′⎥ w ′+ ⎢ Jη − J ζ ⎦ ⎣⎢ A solução aproximada para o m ovimento da viga é obtida aplicando-se o método de Galerkin às Eqs. (1), (2) e (3). A solução para as eq uações diferenciais de movimento linearizadas e não amortecidas são usadas como ponto de partida. Estas soluções são da forma 1 2 • ⎡• ⎛ s ⎞ ⎢γ + ⎜ ∫ v′w′′ ds ⎟ ⎟ ⎢⎣ ⎜⎝ 0 ⎠ (1) ( • s 2 ( ) ( •• •• v′v′′′ − Dη w′w′′′ + J ζ v ′v′ + Jη w ′ w′ − Fγ = Cγ sin [(2 n − 1)(π 2) s] ⎡ v ′− ⎢ Jη − J ζ ⎢⎣ s r14,3 + r24, 4 + 2 r12,3 r22, 4 cosh (r1,3 ) cos (r2, 4 ) • s • ⎤ ⎛• ′ 2 •′ ⎞ ⎜ w γ + v γ − v ′ ∫ v′′w′ ds ⎟ − Jη w ′ ⎥ ⎜ ⎟ ⎥⎦ 0 ⎝ ⎠ • 2 • 2 ′ ⎫ + w′ J ζ v ′ + Jη w ′ ⎬ , ⎭ ( • •• ) ( • (2) )[( ) • ⎡⎛ s • ⎤ ⎞ ⎡⎛ • 2 − v′′w′′] − J ξ ⎢⎜⎜ ∫ v′w′′ds ⎟⎟ − v′ w ′ ⎥ + J η − J ζ ⎢⎜ v ′ ⎥⎦ ⎢⎣⎝ 0 ⎣⎝ ⎠ • 2 • • ⎤ ⎞ − w ′ ⎟ γ − v ′w ′ ⎥ . ⎠ ⎦ ( ) (3) u (0, t ) = v (0, t ) = v′ (0, t ) = w (0, t ) = w′ (0, t ) = γ (0, t ) = 0, (4) v ′′ (L, t ) = v ′′′ (L, t ) = w′′ (L, t ) = w′′′ (L, t ) = γ ′ (L, t ) = 0, (5) e γ (s, t) é o ângulo de torção da viga, dado por, s 0 0 γ = φ + ∫ (v′′w′) ds = φ − ∫ (v′w′′) ds . (6) Por conveniência, as Eq s. (1), (2) e (3) podem ser adimensionalizadas usando-se os parâm etros s* = s L , v* = v L , J ζ* = J ζ m L2 , Jξ = Jη + Jζ , Jη* = Jη m L2 , * v 2 [ c = cv L m Dη [ ( t * = t Dη m L4 ] 0.5 )] 0.5 c = cw L [m Dη ] , , * w 0.5 2 * 2 * 2 [ cγ = cγ L m Dη , w = w L , Ω = Ω L [m Dη ] . * 0.5 ( ) +r1,3 r2, 4 r22, 4 − r12,3 sinh (r1,3 )sin (r2, 4 ) = 0 . (12) Adota-se uma viga de c omprimento L=25, seção transversal quadrada com altura a e largura b, sendo b=L/25, momentos de inércia distribuída Jη = 0.00013, Jζ = 0.00013 e Jξ = 0.0026 e grandezas adimensionais βy = 1, βγ = 0.6489, Cv =1, Cw =1 e Cγ =1.4142. Para sim plificar a an álise, os termos Jη , Jζ e Jξ nas Eqs. (1) e (2), bem como, os termos Jη e Jζ na Eq. (3), são desconsiderados. Assim, o sistema de Eqs. (1), (2) e (3) reduz-se a •• • ⎧ ⎪1.0002 v + 1.0002 cv v + 12.366 v − 6.5994γ w ⎪ •• ⎞ ⎛ • 2 • 2 •• ⎪+ 40.472 v w 2 + v 3 + 4.599 ⎜⎜ v + w + v v + w w ⎟⎟ v ⎪ ⎠ ⎝ ⎪ ⎪− 0.783 qv ( s) cos (Ω t + τ ) = 0 ⎪ ⎪⎪ •• • ⎨1.0002 w + 1.0002 cw w + 12.366 w + 6.5994γ v ⎪ • 2 •2 •• •• ⎪+ 40.472 w v 2 + w3 + 4.599 ⎛⎜ w + v + w w+ v v ⎞⎟ w = 0 ⎟ ⎜ ⎪ ⎠ ⎝ ⎪•• • •• •• ⎪γ + c γ + 6003.9 γ + 2.674 v w − 2.674 v w γ ⎪ • • ⎪ ⎪− 0.001v w = 0 ⎪⎩ ( As quantidades cv, cw e cγ representam o amortecimento viscoso da viga, introduzidos para am ortecer as vibraçõe s nas direções Y, Z e φ, respectivamente. As condições de contorno para as Eqs. (1), (2) e (3) são, s (11) 5. RESULTADOS NUMÉRICOS • J ξ γ + J ξ cγ γ − Dη β γ γ ′′ = − Dη 1 − β y v′′ 2 − w′′ 2 γ • ( n = 1, 2, ... ) , (10) (10), isto é, 1 (m 2 ∫L ) (9) As quantidades r1 a r4, dadas em [14], s atisfazem as equações características obtidas impondo-se Fv′′,′w = 1 na Eq. [ •• • ⎡• ⎛ s ⎞ •′ ⎤ ⎡s 2 ⎤ ⎞⎟ ⎤ 2 ⎥ ⎜ ⎟ ⎢ ′ ′ ′ ′ ′ ⎢ ∫ v + w ds ⎥ ⎟ds − J ξ γ + ⎜ ∫ v w ds ⎟ − w v′⎥ ⎦ ⎢ ⎝0 ⎠ ⎣0 ⎦ ⎠ ⎥⎦ ⎣ ( (8) − (r1,3 r2, 4 )sin (r2, 4 s )]} , ) ) w (s, t ) = Fw (s ) wt (t ) = Fw (s ) cos (ωwt + Bw ) , Fv ,w = Cv ,w {cosh (r1,3 s ) − cos (r2, 4 s ) − K v ,w [sinh (r1,3 s ) s ⎤ ′ + γ 2 w′′ − v′′′∫ v′′w′ds⎥ − w′Dη v′′ 2 + w′′ 2 + w′ − Dη β y 0 ⎦ ) (7) sendo, •• • ″ ′ m w + cw w + Dη w′′ = ⎧⎨ Dη β γ γ ′v′′ + Dη 1 − β y ⎡(v′′γ ) ⎢⎣ ⎩ ( v (s, t ) = Fv (s ) vt (t ) = Fv (s ) cos (ωvt + Bv ) , γ (s, t ) = Fγ (s ) vγ (t ) = Fγ (s ) cos (ωγ t + Bγ ) . • • ⎞ + w ′γ − w ′ ∫ v′w′′ ds ⎟⎟ 0 ⎝ ⎠ ′ • • • 2 • ⎫ ⎤ ⎛ • 2 ⎞ + J ζ v ′ ⎥ + v′ ⎜ J ζ v ′ + Jη w ′ ⎟ − J ξ cγ w′ γ ⎬ ⎦ ⎝ ⎠ ⎭ + qv (s ) cos (Ω t ) , ( )⎛⎜⎜ v ′γ 4. AUTOFUNÇÕES ] 0.5 , ( ) (13) ) Linearizando o sistema dado na E q. (13), obtêm-se as frequências naturais de vi bração da vi ga. Elas são, ωv = ωw = 12.366 1.0002 = 3.5162 e ωγ = 6003.9 1,0 = 77.4771. De forma analítica, podem-se determinar as frequências naturais de v ibração da v iga na Eq. (12). Elas são ωv = ωw = 3.5162 e ωγ = 77.4862, ou seja, pr óximas às obtidas a partir do sistema linearizado. 249 5.1. Vibração não linear Tratando-se do movimento livre não linear não amortecido da viga, faz-se necessário assumir a exci tação harmônica nula, isto é, qv(s)=0, bem como desconsiderar a participação do amortecimento (cv = cw = cγ = 0). Integrando numericamente o si stema de equações diferenciais não lineares, encontra-se que ωv =ωw =3.5161 e ωγ =78.5398, próximos também, às obtidas do sistema linearizado. 5.2. Vibração forçada Para levar em conta os efe itos da solicitação lateral harmônica no comportamento dinâmico não l inear da viga, toma-se qv(s)=0.5 e cv = cw = cγ = 5%. Na Fig. 2 apresenta-se a variação dos máximos deslocamentos da viga com relação à frequência de vibração da excitação lateral, as quais foram obtidas usando-se o programa AUTO [15]. 1.80 1.40 1.20 v 1.80 B1 Estável B2 Estável B2 Instável B3 Estável B3 Instável B4 Instável Pt. Limite Bifurcação 1.60 1.00 B1 Estável B2 Estável B2 Instável B3 Estável B3 Instável B4 Instável Pt. Limite Bifurcação 1.60 1.40 1.20 w 0.80 1.00 0.80 0.60 0.60 0.40 0.40 0.20 0.20 0.00 0.00 0.00 2.00 4.00 6.00 8.00 10.00 12.00 0.00 2.00 4.00 Ω 8.00 10.00 12.00 (b) Curva de ressonância em w (t) 2.0E-004 B1 Estável B2 Estável B2 Instável B3 Estável B3 Instável B4 Instável Pt. Limite Bifurcação 1.8E-004 1.6E-004 1.4E-004 1.2E-004 γ 6.00 Ω (a) Curva de ressonância em v (t) 1.0E-004 8.0E-005 6.0E-005 4.0E-005 2.0E-005 0.0E+000 0.00 2.00 4.00 6.00 8.00 10.00 12.00 Ω (c) Curva de ressonância em γ (t) Fig. 2 – Diagramas de bifurcação. Na Fig. 2, as linhas contínuas e t racejadas representam, respectivamente, as soluç ões estáveis e in stáveis da viga. Em adição, linhas c om diferentes cores representam diferentes ramos de soluções. O diagrama de bifurcação da Fig. 2, no início, aprese nta um braço de soluções estáveis, contudo, com o increm ento do parâmetro de c ontrole, verifica-se uma bifurcação para Ω = 3.9247 e v=1.6022. No ponto de bifurcação, o braço de soluções periódicas estáveis, que existia à sua es querda, torna-se instável à direita. Al ém disso, surgem à direita dois novos braços de soluções periódicas instáveis. Na Fig. 3 reapresenta-se o diagrama de bifurcaçã o da Fig. 2 no espaço v, w, Ω . Νela observa-se melhor os braços de soluções estáveis e instáveis na viziança da bifurcação. Fig. 3. Diagrama di bifuracação no espaço v, w, Ω. Vê-se na Fig. 3 que dois dos três braços de soluções periódicas instáveis passam, cada um , por dois pontos limites. No ponto limite, a so lução periódica instável que existia antes do ponto limite continua, após o pon to, como um braço de soluções periódicas estáveis e vice-versa. Seguindo a Fig. 3, ve rifica-se que as três soluç ões periódicas instáveis convergem para um novo ponto de bifurcação, onde, após a bifurcação, um dos braç os de soluções periódicas torna-se estável e os outros dois são destruídos. Na Fig. 4 mostra-se a resposta no tempo e os correspondentes planos de fase e mapas de Poincaré para a viga em questão. Por meio da Fig. 4 é possível confirmar a existência de pelo menos duas soluções periódicas estáveis, uma de maior amplitude de vibração que a outra . Olhando cada uma das variá veis de estado, verifica-se na Fig. 4(a) que ambas as sol uções vibram em torna da configuração fundamental de equilíbrio, enquanto que, na Fig. 4(b) e Fig . 4(c) existe apenas uma solução periódica. Ainda, verifica-se na Fig. 4 que todas as soluções são de período 1T. Na Fig. 5, apresentam-se quatro projeções da bacia de atração, as quais correspondem aos diagramas de bifurcação da Fig. 4. Na Fig. 5(a) e Fi g. 5(c), observa-se que todo o espaço das condições iniciais está associa do à solução de menor amplitude de vibração, estando envolvida por uma bacia contínua. Entretanto, para o m esmo parâmetro de controle, nota-se na Fig. 5(b) e Fig. 5(d) a presença dos dois atratores não-triviais. 6. CONCLUSÃO Os resultados apresentados mostram que, m esmo solicitando a viga em uma única direção, quando a frequência de vibração da solicitação aproxima-se da frequência natural da viga, ela apresenta deslocamentos periódicos nos três graus de liberdade, em função do acoplamento não linear, sendo os deslocamentos na direção da solicitação os de maior amplitude. 250 Um Estudo das Oscilações Não Lineares de Vigas Espaciais Paulo B. Gonçalves, Eulher C. Carvalho, Zenon J N del Prado v 0.40 0.30 0.20 0.10 0.00 -0.10 -0.20 -0.30 -0.40 600 602 604 606 608 610 [2]DOI Crespo da Silva, M. R. M; Glynn, C. C., “ Nonlinear flexural-flexural-torsional dynamics of inextensional beams. II. Forced motions”. Journal of Structural Mechanics Vol. 6, No. 4, pp. 449-461, 1978. 1.50 1.00 0.50 v 0.00 -0.50 -1.00 -1.50 -0.40 -0.20 0.00 0.20 0.40 v t (a) Deslocamento w 0.40 0.30 0.20 0.10 0.00 -0.10 -0.20 -0.30 -0.40 600 602 604 606 608 610 v – Velocidade 2.00 v& [4]DOI Pai, P. F. and Nayfe .h, A. H.,“Three-dimensional nonlinear vibrations of composite beams. I. E quations of motion”. Nonlinear Dynamics Vol. 1, p p. 477-502, 1990. 1.00 w 0.00 -1.00 -2.00 -0.40 -0.20 0.00 0.20 0.40 t w – Velocidade w& 4.0E-004 4.0E-005 2.0E-004 2.0E-005 γ γ 0.0E+000 0.0E+000 -2.0E-005 -2.0E-004 -4.0E-005 600 602 604 606 608 610 -4.0E-004 -4.0E-005 t (c) Deslocamento γ – Velocidade 0.0E+000 γ γ& 4.0E-005 6.00 9.0 2.00 3.0 v 0.0 w -3.0 0.00 -2.00 -6.0 -4.00 -9.0 -12.0 -1.6 [9]DOI Yao M. H.,Zh ang, W., “Multi-pulse Shilnikov orbits and chaotic dynamics for nonlinear nonplanar motion of a can tilever beam”. International Journal of Bifurcation and Chaos Vol. 15, pp. 3923-3952, 2005. 4.00 6.0 -0.8 0.0 0.8 -6.00 -0.90 -0.60 -0.30 0.00 0.30 0.60 0.90 1.6 v (a) Deslocamento v w – Velocidade 1.0E-003 v& (b) Deslocamento 0.90 γ w – Velocidade w& 0.60 5.0E-004 w 0.00 -0.30 -5.0E-004 -1.0E-003 -2.0E-004 -0.60 0.0E+000 2.0E-004 γ (c) Deslocamento γ – Velocidade γ& -0.90 -1.60 [10] Zhang, W., Wang, F. X., e Yao, M. H., “Gl obal bifurcation and chaotic dynamics in nonlinear nonplanar oscillation of a p arametrically excites cantilever beam”. Nonlinear Dynamics Vol. 40, pp. 251-279, 2005. [11]DOI Lee, W. K., Lee, K. S.,Pak, C. H., “Stability analysis for nonplanar free vibrations of a can tilever beam by using nonlinear normal modes”. Nonlinear Dynamics Vol. 52, pp. 217-225, 2008 0.30 0.0E+000 [7]DOI Aghababaei, O., Nahvi, H., Ziaei-Rad, S.,“Non-linear non-planar vibrations of geometrically imperfect inextensional bemas, Part I: Eq uations of motion and experimental validation”. International Journal of NonLinear Mechanics Vol. 44, pp. 147-160, 2009. [8]DOI Zhang, W., “Chaotic motion and its control for nonlinear nonlinear nonplanar oscillations of a p arametrically excited cantilever beam”. Chaos, Solids and Fractals Vol. 26, pp. 731-745, 2005. Fig. 4 – Resposta no tempo e plano fase para Ω = 4.0. 12.0 [5]DOI Pai, P. F. and Nayfe .h, A. H., “Three-dimensional nonlinear vibrations of composite beams. II. Flapwise excitation”. Nonlinear Dynamics Vol. 2, pp. 1-34, 1991. [6]DOI Pai, P. F. and Nayfe .h, A. H., “Three-dimensional nonlinear vibrations of composite beams. III. Chordwise excitation”. Nonlinear Dynamics Vol. 2, pp. 137-156, 1991. w (b) Deslocamento [3]DOI Crespo da Silva, M. R. M; Glynn, C. C.,“ Nonlinear nonplanar resonant oscillations in fixed-free beams with support asymmetry”. International Journal of Solids and Structures Vol. 15, pp. 209-219, 1979. -0.80 0.00 0.80 1.60 v (d) Deslocamento v – Deslocamento w Fig. 5 – Bacias de atração para Ω = 4.0. AGRADECIMENTOS Este trabalho foi realizado com apoio do Ministério da Educação – CNPq, CAPES e FAPERJ. REFERÊNCIAS [1] Crespo da Silva, M. R. M. e Glynn, C . C., “N onlinear flexural-flexural-torsional dynamics of inextensional beams. I. E quation of motion”. Journal of Structural Mechanics Vol. 6, No. 4, pp. 437-448, 1978. [12] Zhang, W., Li , S., Yao, M., “Global bifurcation and manypulse type chaotic dynamics in the nonlinear nonplanar oscillations of a can tilever beam”. IDET/CIE. September 2009. [13] Crespo da Silva, M. R. M., “Equations for nonlinear analysis of 3d motions of Beans”. Applied Mechanics Reviews Vol. 44, pp. 51-59, 1991. [14] Zaretzky, C. L., Crespo da Silva, M. R. M., “Experimental investigation of non-linear modal coupling in the response of cantilever beams”. Journal of Sound and Vibration Vol. 174, No. 2, pp. 145-167, 1994. [15] Doedel, E. J., C hampneys, A. R., Fairgrieve, T. F., Kuznetsov, Y. A., Sa ndstede B., Wang X., “AUTO 97”, Concordia University, Montreal, Canada, 1998.
Baixar