FUNDAMENTOS
DE ROBÓTICA
Modelo Cinemático de
Robôs Manipuladores
Modelo Cinemático de
Robôs Manipuladores
• Introdução
• Modelo Cinemático Direto
• Modelo Cinemático de um Robô de 2 GDL
• Representação de Denavit-Hartenberg
• Exemplos de Aplicação
• Modelo Cinemático Inverso
• Método Geométrico
• Método Baseado nas Matrizes Homogêneas
• Modelo Cinemático Diferencial
Prof. Silas do Amaral - UDESC
2
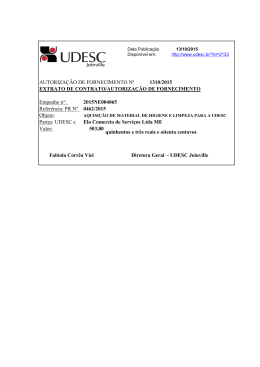
Cinemáticas Direta e Inversa
Coordenadas
das Juntas
(q1, q2, ..., qn)
Cinemática
Inversa
Cinemática
Direta
Posição e
Orientação
do E. Final
(x, y, z, α, β, γ)
Prof. Silas do Amaral - UDESC
3
Cinemáticas Direta e Inversa
Espaço das
Juntas
Espaço
Operacional
Prof. Silas do Amaral - UDESC
4
Modelo Cinemático Direto
Conhecidas as coordenadas das juntas e os parâmetros geométricos de um robô de 6 GDL, a posição e a orientação do EF são descritas em um sistema de coordenadas de referência pelas seguintes
relações:
x = fx (q1, q2 , q3 , q 4 , q5 , q6 )
y = fy (q1, q2 , q3 , q 4 , q5 , q6 )
z = fz (q1, q2 , q3 , q 4 , q5 , q6 )
α = fα (q1, q2 , q3 , q 4 , q5 , q6 )
β = fβ (q1, q2 , q3 , q 4 , q5 , q6 )
γ = fγ (q1, q2 , q3 , q 4 , q5 , q6 )
Prof. Silas do Amaral - UDESC
5
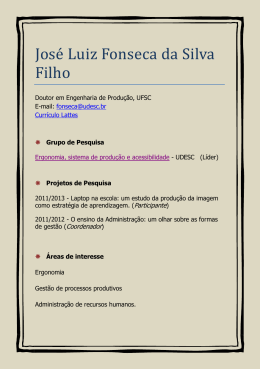
Manipulador de 2 GDL
Para um manipulador de 2
GDL, a descrição da sua
cinemática direta é obtida
facilmente.
x = l1 cos q1 + l2 cos(q1 + q2 )
y = l1 sen q1 + l2 sen(q1 + q2 )
Para obter a cinemática direta de manipuladores com maior número
de graus de liberdade, é necessário um procedimento sistemático.
Prof. Silas do Amaral - UDESC
6
Método Baseado nas MTH’s
A cada elo do robô, associa-se um sistema de coordenadas. MTH’s são
usadas para representar rotações e/ou translações relativas entre elos.
Denota-se por i-1Ai a MTH que descreve o sistema de referência {Si}, solidário ao elo i, em relação a {Si-1}, solidário ao elo i-1.
Desta forma,
0A
1
1A
2
0A
k
descreve {S1} com relação à base (elo 0);
descreve {S2} com relação {S1};
descreve {Sk} com relação à base.
Além disso, são válidas as relações ao lado:
Para um robô de 6 GDL,
a MTH do EF em relação
à base é dada por:
0
A 2 = 0 A 11 A 2
0
A 3 = 0 A 11 A 2 2 A 3
0
A k =0 A 11 A 2 ...
k −1
Ak
T = 0 A 6 = 0 A 11 A 2 2 A 3 3 A 4 4 A 5 5 A 6
Prof. Silas do Amaral - UDESC
7
Parâmetros de Denavit
Denavit--Hartenberg
Prof. Silas do Amaral - UDESC
8
Transformações Básicas
Para estabelecer um método sistemático, é necessário definir 4
transformações básicas relacionadas a cada junta.
A cada uma destas transformações está associado um parâmetro
cinemático.
As transformações básicas e seus respectivos parâmetros são:
4
Rotação de um ângulo θi em torno do eixo zi-1
4
Translação de uma distância di ao longo do eixo zi-1, ou do
vetor di = (0, 0, di)
4
Translação de uma distância ai ao longo do eixo xi, ou do
vetor ai = (ai, 0, 0)
4
Rotação de um ângulo αi em torno do eixo xi
Prof. Silas do Amaral - UDESC
9
Transformações Básicas
Z0 Z1
Rotação do ângulo
θi em torno de zi-1
θ
θi - Ângulo entre os ei-
Y1
Y0
θ
xos xi-1 e xi, medido em
um plano perpendicular
ao eixo zi-1, usando a
regra da mão direita.
Parâmetro variável em
juntas rotacionais.
X0
X1
Prof. Silas do Amaral - UDESC
10
Transformações Básicas
Z0 Z1
d
Y1
θ
di - Distância ao longo
θ
Y0
X1
X0
Translação da distância di ao longo
do eixo zi-1
do eixo zi-1, desde a
origem do sistema de
coordenadas i-1 até a
intersecção entre os
eixos zi-1 e xi.
Parâmetro variável em
juntas prismáticas.
Prof. Silas do Amaral - UDESC
11
Transformações Básicas
Z0 Z1
Translação da distância ai ao longo
do eixo xi
θ
Z1
d
Y1
a
Y0
θ
X0
X1
ai - Distância ao longo
do eixo xi, desde a
intersecção entre os
eixos zi-1 e xi até a
origem do sistema i
para junta rotacional.
Para junta prismática,
é a distância mais curta
entre os eixos zi-1 e zi.
Prof. Silas do Amaral - UDESC
12
Transformações Básicas
Z0
d
Rotação do ângulo
αi em torno de xi
θ
Z1
Y1
αi - Ângulo entre os ei-
α
a
Y0
θ
X0
xos zi-1 e zi, medido em
um plano perpendicular
ao eixo xi, usando a
regra da mão direita.
α
X1
Prof. Silas do Amaral - UDESC
13
Composição das Transformações
Básicas
As transformações básicas devem ser realizadas na ordem indicada abaixo, produzindo a seguinte matriz de transformação do sistema {Si} com
relação ao sistema {Si-1}:
i-1
A i = T( z, θ i ) T(0,0, di ) T(a i ,0,0) T( x, α i )
Cθ i
Sθ
= i
0
0
Cθ i
Sθ
= i
0
0
0 0 1 0
Cθ i 0 0 0 1
0
1 0 0 0
0
0 1 0 0
- Cα i Sθ i Sα i Sθ i
Cα i Cθ i - Sα i Cθ i
- Sθ i
Sα i
0
Cα i
0
0 1
0 0 0
1 di 0
0 1 0
a i Cθ i
a i Sθ i
di
1
0
0 0 a i 1 0
1 0 0 0 Cα i
0 1 0 0 Sα i
0 0 1 0 0
Prof. Silas do Amaral - UDESC
0
− Sα i
Cα i
0
0
0
0
1
14
Parâmetros de DenavitDenavit-Hartenberg
Comprimento do Elo
ai = (zi −1 I x i ) , Oi
xi
Distância medida ao longo da normal comum entre os eixos das juntas. Traduz o
conceito de afastamento linear entre eixos.
Distância entre Elos
d i = Oi −1 , (zi −1 I x i ) zi −1
Também designado por deslocamento de
juntas, isto é, a distância entre elos medida
ao longo do eixo da junta anterior.
Ângulo de Junta
θi = ∠(x i −1 , x i ) zi −1
Ângulo definido normalmente entre o eixo
de um elo e o eixo do elo seguinte.
Ângulo de Torção do Elo
α i = ∠(zi −1 , zi ) xi
Ângulo de torção do elo, desde o eixo de
uma junta até o eixo da junta seguinte.
Prof. Silas do Amaral - UDESC
15
Algoritmo de Denavit-Hartenberg
1
a) Numerar os elos, iniciando em 1 (primeiro elo móvel) e terminando
em n (último elo móvel). A base do robô é numerada como o elo 0.
b) Numerar as juntas, iniciando em 1 (ref. 1º GDL) e terminando em n.
c) Localizar o eixo de cada junta. Se rotacional, é o eixo de rotação;
se prismática, é o eixo ao longo do qual ocorre o deslocamento.
2
Para i variando de 0 a n-1, situar o eixo zi sobre o eixo da junta i+1.
3
Situar a origem do sistema da base {S0} em qualquer ponto do eixo z0.
Os eixos x0 e y0 devem formar um sistema dextrógiro com z0.
4
Para i variando de 1 até n-1,
a) Situar o sistema {Si}, solidário ao elo i, na intersecção do eixo zi
com a linha normal comum a zi-1 e zi.
Se os eixos se interceptarem, localizar Oi na intersecção.
Se os eixos forem paralelos, localizar Oi na junta i+1.
Prof. Silas do Amaral - UDESC
16
Algoritmo de Denavit-Hartenberg
4
b) Definir xi = ±(zi-1 ⊗ zi). Se xi for orientado de zi-1 para zi, ai ≥ 0.
Se zi-1 e zi forem paralelos, situar xi na normal comum a zi-1 e zi.
c) Definir yi = zi ⊗ xi, formando um sistema dextrógiro.
5
Situar o sistema {Sn} no extremo do robô de modo que zn coincida
com a direção de zn-1 e xn seja normal a zn e zn-1.
Para i variando de 1 até n,
6
a) Obter os parâmetros de D-H: θi , di , ai e αi.
b) Obter as MTH’s dos elos:
7
i-1A .
i
Obter a MTH que relaciona {Sn} a {S0}, isto é, T = 0A1 1A2 ... n-1An.
Com isso, obtêm-se a posição e a orientação do extremo do robô referidas a sua base, em função das coordenadas das juntas.
Prof. Silas do Amaral - UDESC
17
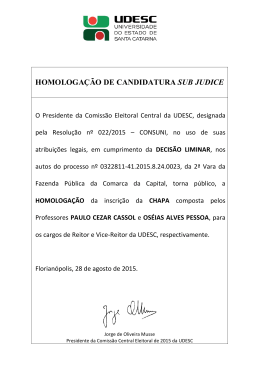
Exemplo 1
Obter os parâmetros D-H
para o manipulador abaixo.
Junta θ
θ1
1
θ2
2
Prof. Silas do Amaral - UDESC
d
a
α
0
l1
0
0
l2
0
18
Exemplo 2
Obter os parâmetros D-H
para o manipulador abaixo.
Junta
1
2
Prof. Silas do Amaral - UDESC
θ
d
a
α
θ1
L1
0
90
θ2
0
L2
0
19
Estabeleça os sistemas de coordenadas para o manipulador Robô
SCARA ao lado e obtenha os parâmetros de Denavit-Hartenberg.
Prof. Silas do Amaral - UDESC
20
Robô SCARA
Sistemas de
Coordenadas
Junta
1
2
3
4
θ
d
a
α
θ1
LA
LB
π
θ2
0
LC
0
0
d3
0
0
θ4
LD
0
0
Parâmetros de
Denavit - Hartenberg
Prof. Silas do Amaral - UDESC
21
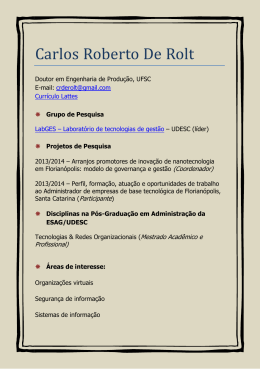
Robô
IRB6400C
de 6 GDL
Prof. Silas do Amaral - UDESC
22
Baixar