PR
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS DE CURITIBA
DEPARTAMENTO DE PESQUISA E PÓS-GRADUAÇÃO
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
E DE MATERIAIS - PPGEM
HIDERALDO LUIS VASCONCELOS DOS SANTOS
AVALIAÇÃO DE MODELOS NUMÉRICOS PARA
REPRESENTAR O NÚCLEO LAMINADO DOS
ROTORES DE MÁQUINAS ELÉTRICAS
CURITIBA
NOVEMBRO - 2008
HIDERALDO LUIS VASCONCELOS DOS SANTOS
AVALIAÇÃO DE MODELOS NUMÉRICOS PARA
REPRESENTAR O NÚCLEO LAMINADO DOS
ROTORES DE MÁQUINAS ELÉTRICAS
Dissertação apresentada como requisito parcial à
obtenção do título de Mestre em Engenharia, do
Programa de Pós-Graduação em Engenharia
Mecânica e de Materiais, Área de Concentração em
Mecânica dos Sólidos e Vibrações, do Departamento
de Pesquisa e Pós-Graduação, do Campus de
Curitiba, da UTFPR.
Orientador: Prof. Marco Antônio Luersen, D.Sc.
Co-orientador: Prof. Carlos Alberto Bavastri, Dr. Eng.
CURITIBA
NOVEMBRO - 2008
TERMO DE APROVAÇÃO
HIDERALDO LUIS V. DOS SANTOS
AVALIAÇÃO DE MODELOS NUMÉRICOS PARA
REPRESENTAR O NÚCLEO LAMINADO DOS
ROTORES DE MÁQUINAS ELÉTRICAS
Esta Dissertação foi julgada para a obtenção do título de mestre em engenharia,
área de concentração em Mecânica dos Sólidos e Vibrações, aprovada em sua
forma final pelo Programa de Pós-graduação em Engenharia Mecânica e de
Materiais.
_________________________________
Prof. Giuseppe Pintaúde, Dr. Eng.
Coordenador de Curso
Banca Examinadora
Prof. Marco Antônio Luersen, D.Sc.
Universidade Tecnológica Federal do Paraná
Prof. Domingos Alves Rade, Dr.
Universidade Federal de Uberlândia
Prof. Jucélio Tomás Pereira, D.Sc.
Universidade Tecnológica Federal do Paraná
Prof. Carlos Alberto Bavastri, Dr. Eng.
Universidade Federal do Paraná
Universidade Tecnológica Federal do Paraná
Curitiba, 25 de Novembro de 2008
iii
Dedico este trabalho à minha mãe Daúva Ortiz
dos Santos, que sempre batalhou pelo nosso
futuro.
iv
AGRADECIMENTOS
A minha noiva Gizele pelo amor, pela grande dedicação e compreensão que teve
durante esta longa caminhada.
A minha irmã Maria e meu cunhado Silvio por todo apoio e por me acolher no começo
de tudo quando fui estudar em Curitiba.
Aos meus dois orientadores, Prof. Marco Antônio Luersen e Prof. Carlos Alberto
Bavastri por toda sua dedicação, profissionalismo e motivação que permitiram este trabalho
se tornar realidade.
Ao Prof. Jucélio Tomás Pereira por todos os ensinamentos e especialmente o grande
apoio e preocupação que, juntamente com o Prof. Carlos A. Bavastri tiveram para ajustar os
horários de suas aulas para que pudéssemos conciliar o Mestrado em Curitiba e o trabalho
em Jaraguá do Sul.
Ao meu grande companheiro de mestrado e amigo Francisco José Doubrawa Filho
pela amizade e exemplo de dedicação aos estudos que sempre nos motivou nesta jornada.
Ao meu colega de trabalho Hilton Penha Silva, um grande professor e incentivador que
sempre me apoiou.
Ao meu colega de trabalho Cassiano Antunes Cezário pelos preciosos ensinamentos
de Ansys e pelas curiosas correções de português que fez na minha dissertação.
A WEG Equipamentos Elétricos S.A. – Motores, na pessoa do Sr. Sebastião Lauro
Nau por incentivar o mestrado e autorizar minha ausência do trabalho e na pessoa do Sr.
Hugo Gustavo G. Mello pela grande paciência e pelo apoio que sempre nos deu. Agradeço
também a WEG por todos os recursos técnicos que me foram disponibilizados para realizar
este trabalho.
Ao Programa de Pós-Graduação em Engenharia Mecânica e de Materiais da UTFPR
pela infra-estrutura e administração disponibilizadas.
Ao MCT/FINEP/FNDCT – Chamada PROMOVE – Laboratórios de Inovação –
Convênio 4931/06 pelo apoio financeiro no desenvolvimento deste trabalho.
v
SANTOS, Hideraldo L. V. dos, Avaliação de modelos numéricos para representar
o núcleo laminado dos rotores de máquinas elétricas, 2008, Dissertação
(Mestrado em Engenharia) - Programa de Pós-graduação em Engenharia Mecânica
e de Materiais, Universidade Tecnológica Federal do Paraná, Curitiba, 80p.
RESUMO
Quase todos os rotores de máquinas elétricas girantes são constituídos por um
cilindro metálico montado com interferência sobre um eixo. Este cilindro é formado
por um conjunto de lâminas de aço de pequena espessura, que são empilhadas e
compactadas formando um bloco único chamado de núcleo laminado ou pacote
laminado. Esta arquitetura é necessária para melhorar o desempenho elétrico da
máquina. O núcleo laminado acrescenta uma parcela de rigidez adicional ao sistema
e uma caracterização inadequada deste elemento pode ocasionar em grandes erros
na previsão do comportamento dinâmico do rotor. Assim, o presente trabalho tem
como objetivo comparar e avaliar algumas opções existentes de modelos de viga,
que permitam representar o efeito de enrijecimento do pacote de chapas no
comportamento dinâmico de rotores de máquinas elétricas girantes. Para tal fim,
inicialmente uma pesquisa bibliográfica é efetuada e na seqüência são identificados
e implementados, via elementos finitos, três diferentes modelos de viga equivalente,
quais sejam, (i) “modelo com diâmetro equivalente”, (ii) “modelo não ramificado” e
(iii) “modelo ramificado”. Com o intuito de validar os modelos, são realizados
experimentos
para
a
obtenção
das
primeiras
freqüências
naturais
e
os
correspondentes modos de vibrar na condição livre de apoios, em nove rotores com
características
construtivas
diferentes.
Os
modelos
então
são
avaliados,
comparando-se os valores das freqüências naturais obtidas experimentalmente com
aquelas calculadas por elementos finitos. Constatou-se que, para a maioria dos
rotores analisados, o modelo ramificado se mostrou o mais adequado. Finaliza-se o
trabalho com uma discussão crítica do comportamento dos modelos de viga
equivalente estudados.
Palavras-chave: Dinâmica de rotores, Modelo de viga equivalente, Pacote
laminado.
vi
SANTOS, Hideraldo L. V. dos, Assessment of numerical models to represent the
laminated rotor core of electrical machines, 2008, Dissertation (Master’s in
Engineering) – Post Graduation Program in Mechanical and Materials Engineering,
Universidade Tecnológica Federal do Paraná (Technological University of Paraná),
Curitiba, 80 p.
ABSTRACT
Almost all rotating electrical machines have rotors that are composed of a
metallic cylinder and a steel shaft assembled with interference fit. This cylinder is
made up of a compacted stack of thin metallic plates, usually referred to as laminated
core. The laminated type structure is necessary in order to improve the electrical
performance of the machine, on the other hand it enhances the stiffness of the
system and an inadequate characterization of this element may lead to huge errors in
the assessment of the dynamic behavior of the rotor. In face of this fact, the purpose
of the present work is to compare and evaluate some existing beam models which
allow the representation of the stiffening effect of the laminated core on the dynamic
behavior of the rotating electrical machine rotor. Towards this end, a bibliographic
research is firstly carried out and three equivalent beam models using finite elements
are selected and implemented, namely (i) “equivalent diameter model”, (ii)
“unbranched model” and (iii) “branched model”. With the objective of validating the
models, a set of experiments is then performed with nine different rotors of electrical
machines, so that the first natural frequencies and the corresponding vibration modes
in a free-free support condition could be obtained in practice. The models are
evaluated by comparison of the natural frequencies obtained by the experimental
analysis with those obtained by numerical analysis. The results show that, for the
majority of the tested rotors, the branched model is the most suitable one. Finally, a
critical discussion about the behavior of the equivalent beam models studied is
presented.
Keywords: Rotordynamics, Equivalent beam model, Laminated core
vii
SUMÁRIO
RESUMO..................................................................................................................... v
ABSTRACT ................................................................................................................ vi
LISTA DE FIGURAS .................................................................................................. ix
LISTA DE TABELAS ................................................................................................. xii
LISTA DE ABREVIATURAS E SIGLAS ................................................................... xiii
LISTA DE SÍMBOLOS .............................................................................................. xiv
1
INTRODUÇÃO...................................................................................................... 1
1.1
Aspectos Construtivos de Máquinas Elétricas Girantes ..........................................................3
1.1.1 Elementos básicos de uma máquina elétrica .......................................................................3
1.1.2 Tipos de rotores ....................................................................................................................4
1.2
Problemática.............................................................................................................................8
1.3
Revisão Bibliográfica ............................................................................................................. 10
1.4
Definição do Problema, Objetivos e Organização do Trabalho ............................................ 13
2
ELEMENTOS FINITOS UTILIZADOS NA REPRESENTAÇÃO DO ROTOR ..... 15
2.1
Equação do Movimento ......................................................................................................... 15
2.2
Matrizes de Rigidez, Massa e Giroscópica dos Elementos Usados nos Modelos de Viga
Equivalente ........................................................................................................................................ 16
0
2.2.1 Elemento de viga de Timoshenko de classe C com interpolação quadrática .................. 16
1
2.2.2 Elemento de viga de Timoshenko de classe C (ou Euler-Bernoulli corrigido para incluir
cisalhamento) ................................................................................................................................ 20
2.2.3 Matriz de massa e giroscópica para os discos ................................................................. 25
2.2.4 Matriz de rigidez do elemento de mola ............................................................................. 26
2.2.5 Montagem das matrizes globais ........................................................................................ 26
3 DESCRIÇÃO DOS MODELOS DE VIGA EQUIVALENTE E EXPERIMENTOS
PARA VALIDAÇÃO ................................................................................................... 27
3.1
Descrição dos Modelos Numéricos de Viga Equivalente...................................................... 27
3.1.1 Modelo 01: acréscimo de rigidez usando diâmetro equivalente ....................................... 27
3.1.2 Modelo 02: pacote como elemento de viga não-ramificado.............................................. 31
3.1.3 Modelo 03: pacote como elemento de viga ramificado ..................................................... 32
3.2
Implementação dos Modelos ................................................................................................ 33
3.3
Análise Modal Experimental .................................................................................................. 36
3.3.1 Objetivos ............................................................................................................................ 36
3.3.2 Rotores testados ............................................................................................................... 36
3.3.3 Descrição dos Experimentos ............................................................................................. 38
3.3.4 Extração dos parâmetros modais ...................................................................................... 42
viii
4
AVALIAÇÃO DOS MODELOS E DISCUSSÃO DOS RESULTADOS ................ 43
4.1
4.2
4.3
4.4
4.5
4.6
5
Curvas de Erro Numérico Experimental de cada Modelo ..................................................... 43
Avaliação da Precisão dos Modelos ..................................................................................... 53
Avaliação da Robustez dos Modelos .................................................................................... 54
Correlação dos Resultados com a Geometria do Rotor ....................................................... 56
Efeito do Cisalhamento no Elemento de Pacote................................................................... 59
Discussão sobre o Comportamento do Modelo 03 ............................................................... 61
CONCLUSÕES E SUGESTÕES DE TRABALHOS FUTUROS ......................... 64
5.1
5.2
Conclusões ............................................................................................................................ 64
Sugestões para trabalhos futuros ......................................................................................... 66
REFERÊNCIAS ......................................................................................................... 68
ANEXO A – TESTE DE MALHA................................................................................ 71
ANEXO B – COMPARAÇÃO DOS MODOS DE VIBRAR ......................................... 74
ix
LISTA DE FIGURAS
Figura 1.1 – Motor síncrono de 18.000 hp que opera próximo da primeira rotação
crítica do rotor (Cortesia WEG Equipamentos Elétricos – Divisão Energia)......... 2
Figura 1.2 – Representação simplificada de um estator de máquina elétrica ............. 3
Figura 1.3 – Representação esquemática de um rotor de máquina elétrica (eixo +
pacote de chapas sem enrolamento) ................................................................... 4
Figura 1.4 – Classificação, baseada em WILD (2002), dos tipos de rotores de
máquinas elétricas girantes.................................................................................. 4
Figura 1.5 – Geometria esquemática de uma chapa de rotor ..................................... 6
Figura 1.6 – Seqüência de montagem do rotor com gaiola de barras de cobre .......... 6
Figura 1.7 – Rotor de barras de cobre (com canais radiais) ....................................... 7
Figura 1.8 – Rotor injetado .......................................................................................... 8
Figura 2.1: Cinemática de deformação de uma viga de Timoshenko nos planos xy (a)
e xz (b). γ representa a deformação cisalhante transversal. .............................. 17
Figura 2.2: Graus de liberdade do elemento de viga de Timoshenko com três nós .. 18
A Figura 2.3 apresenta os graus de liberdade do elemento de viga.Erro!
Indicador
não definido.
Figura 2.4: Graus de liberdade do elemento de viga de Euler-Bernoulli ................... 23
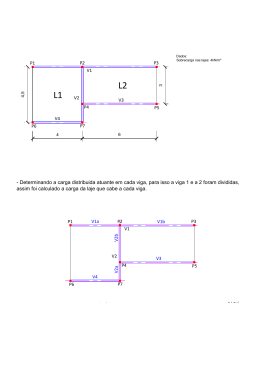
Figura 3.1: Esquema do pacote de chapas representado com diâmetro equivalente.
(a) modelo sólido (b) modelo sólido equivalente (c) modelo de viga equivalente
........................................................................................................................... 28
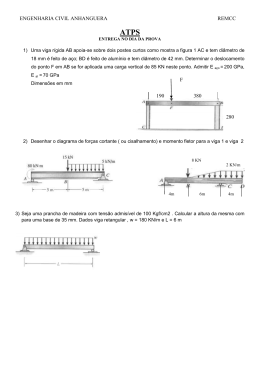
Figura 3.2: Esquema do pacote de chapas representado com elemento de viga em
paralelo (modelo não ramificado) ....................................................................... 31
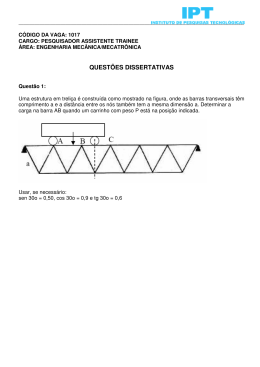
Figura 3.3: Esquema do pacote de chapas e eixo modelados como rotor duplo ...... 32
Figura 3.4: Representação do Modelo 01 implementado no ANSYS ........................ 35
Figura 3.5: Representação do Modelo 02 implementado no ANSYS ........................ 35
x
Figura 3.6: Representação do Modelo 03 implementado no ANSYS ........................ 36
Figura 3.7: Rotor suspenso para ensaio de condição livre-livre ................................ 39
Figura 3.8: Analisador de sinais, martelos de impacto e acelerômetro ..................... 39
Figura 3.9: Coordenadas dos pontos de excitação e resposta (cotas em mm) ......... 40
Figura 3.10: Exemplo de medição no rotor 250IVP ................................................... 40
Figura 3.11: Tela do programa para aquisição de dados (Pulse Labshop) ............... 41
Figura 3.12: Tela do programa de análise modal (ME’scopeVES) ............................ 41
Figura 4.1: Erro nas freqüências naturais rotor 225IIP – Modelo 01 ........................ 43
Figura 4.2: Erro nas freqüências naturais rotor 250IVP – Modelo 01 ........................ 44
Figura 4.3: Erro nas freqüências naturais rotor 355 IIP(A) – Modelo 01 ................... 44
Figura 4.4: Erro nas freqüências naturais rotor 355 IIP(B) – Modelo 01 ................... 44
Figura 4.5: Erro nas freqüências naturais rotor 355 IIP(C) – Modelo 01 ................... 45
Figura 4.6: Erro nas freqüências naturais rotor 315IIP – Modelo 01 ......................... 45
Figura 4.7: Erro nas freqüências naturais rotor 400IIP – Modelo 01 ......................... 45
Figura 4.8: Erro nas freqüências naturais rotor 450IVP – Modelo 01 ........................ 46
Figura 4.9: Erro nas freqüências naturais rotor 560IIP – Modelo 01 ......................... 46
Figura 4.10: Erro nas freqüências naturais rotor 225IIP – Modelo 02 ....................... 47
Figura 4.11: Erro nas freqüências naturais rotor 250IVP – Modelo 02 ...................... 47
Figura 4.12: Erro nas freqüências naturais rotor 355 IIP(A) – Modelo 02 ................. 47
Figura 4.13: Erro nas freqüências naturais rotor 355 IIP(B) – Modelo 02 ................. 48
Figura 4.14: Erro nas freqüências naturais rotor 355 IIP(C) – Modelo 02 ................. 48
Figura 4.15: Erro nas freqüências naturais rotor 315IIP – Modelo 02 ....................... 48
Figura 4.16: Erro nas freqüências naturais rotor 400IIP – Modelo 02 ....................... 49
Figura 4.17: Erro nas freqüências naturais rotor 450IVP – Modelo 02 ...................... 49
Figura 4.18: Erro nas freqüências naturais rotor 560IIP – Modelo 02 ....................... 49
xi
Figura 4.19: Erro nas freqüências naturais rotor 225IIP – Modelo 03 ....................... 50
Figura 4.20: Erro nas freqüências naturais rotor 250IVP – Modelo 03 ...................... 50
Figura 4.21: Erro nas freqüências naturais rotor 355 IIP(A) – Modelo 03 ................. 50
Figura 4.22: Erro nas freqüências naturais rotor 355 IIP(B) – Modelo 03 ................. 51
Figura 4.23: Erro nas freqüências naturais rotor 355IIP(C) – Modelo 03 .................. 51
Figura 4.24: Erro nas freqüências naturais rotor 315IIP – Modelo 03 ....................... 51
Figura 4.25: Erro nas freqüências naturais rotor 400IIP – Modelo 03 ....................... 52
Figura 4.26: Erro nas freqüências naturais rotor 450IVP – Modelo 03 ...................... 52
Figura 4.27: Erro nas freqüências naturais rotor 560IIP – Modelo 03 ....................... 52
Figura 4.28: Relação entre HCO/RE e o erro mínimo para o Modelo 01 ..................... 56
Figura 4.29: Relação entre LCH/Leixo e o erro mínimo para o Modelo 01 ................... 57
Figura 4.30: Relação entre MT/Meixo e o erro mínimo para o Modelo 01 ................... 58
Figura 4.31: Relação entre a geometria do rotor e o erro mínimo para o Modelo 03 59
Figura A.1: Definição do parâmetro Li Di utilizado para a variação da malha ......... 71
Figura B.1– Comparação dos modos para o rotor 225IIP ......................................... 74
Figura B.2 – Comparação dos modos para o rotor 250IVP ...................................... 75
Figura B.3 – Comparação dos modos para o rotor 355IIP(A) ................................... 76
Figura B.4 – Comparação dos modos para o rotor 355IIP(B) ................................... 77
Figura B.5 – Comparação dos modos para o rotor 355IIP(C) ................................... 78
Figura B.6 – Comparação dos modos para o rotor 315IIP ........................................ 79
Figura B.7 – Comparação dos modos para o rotor 560IIP ........................................ 80
xii
LISTA DE TABELAS
Tabela 3-1 – Exemplo de dados de entrada para o modelo paramétrico .................. 33
Tabela 3-2 – Propriedades do material do eixo e rotor ............................................. 34
Tabela 3-3 – Rotores testados .................................................................................. 37
Tabela 3-4 – Relações geométricas dos rotores testados ........................................ 38
Tabela 3-5 – Freqüências naturais obtidas experimentalmente para cada rotor ....... 42
Tabela 4-1 – Erro mínimo obtido com cada modelo de viga equivalente .................. 54
Tabela 4-2 – Parâmetro de cada modelo no erro mínimo ......................................... 55
Tabela 4-3 – Erro médio com parâmetro fixo para avaliar a robustez do modelo ..... 55
Tabela 4-4 – Fator de correção para o cisalhamento transversal, considerando as
dimensões totais, nos cilindros laminados do núcleo dos rotores testados ....... 60
Tabela 4-5 – Erro mínimo alterando cisalhamento no elemento de pacote para
Modelo 02 .......................................................................................................... 60
Tabela 4-6 – Erro mínimo alterando cisalhamento no elemento de pacote para
Modelo 03 .......................................................................................................... 61
Tabela 4-7 – Erro mínimo alterando o módulo de elasticidade no elemento de pacote
- Modelo 03 ........................................................................................................ 62
Tabela A.1 – Efeito do tamanho da malha no erro mínimo para o Modelo 01 .......... 72
Tabela A.2 – Efeito do tamanho da malha no erro mínimo para o Modelo 02 .......... 72
Tabela A.3 – Efeito do tamanho da malha no erro mínimo para o Modelo 03 .......... 73
xiii
LISTA DE ABREVIATURAS E SIGLAS
API
- American Petroleum Institute
APDL - Ansys Parametric Design Language
CAE
- Computer Aided Engineering
CG
- Centro de Gravidade
FRF
- Função de Resposta em Freqüência
LAVIB - Laboratório de Vibrações
MMQ - Método dos mínimos quadrados
TEDS - Transducer Eletronic Data Sheets
xiv
LISTA DOS PRINCIPAIS SÍMBOLOS
φCH
-
Diâmetro externo da chapa do pacote laminado
HCOR
-
Altura da coroa da chapa do pacote laminado
φCOR
-
Diâmetro da região maciça da chapa, antes de iniciar as ranhuras
φE
-
Diâmetro do eixo na região do pacote de chapas
LCH
-
Comprimento total do pacote de chapas
h
-
Espessura de cada chapa do pacote laminado
χ
-
Numero total de chapas que compõem o pacote
-
Parcela da matriz de rigidez elementar devido à flexão para o modelo de
[Kfel]
[Kcel]
[Kel]
Φ
[Mel]
[Gel]
viga de Timoshenko
-
Parcela da matriz de rigidez elementar devido ao cisalhamento para o
modelo de viga de Timoshenko
-
Matriz de rigidez elementar para o modelo de viga de Timoshenko de
classe C0
-
Fator de correção para o cisalhamento transversal
-
Matriz de massa elementar para o modelo de viga de Timoshenko de
classe C0
-
Matriz de giroscópica elementar para o modelo de viga de Timoshenko de
classe C0
[Mdel] -
Matriz de massa e inércia do elemento de disco
[Gdel] -
Matriz giroscópica do elemento de disco
xv
MCH
-
Massa das chapas e gaiola, excluindo a massa dos anéis de curto
LAC
-
Comprimento do anel de curto
φAC
-
Diâmetro externo do anel de curto
MAC
-
Massa do anel de curto
d
-
Distância do CG do anel de curto à chapa extrema do pacote
φEQV
-
Diâmetro equivalente do eixo na região do pacote de chapas
N
-
Número de divisões do pacote
MT
-
Massa total do pacote de chapas
(MCH)’ -
Massa MCH corrigida do acréscimo no diâmetro do eixo
ρE
-
Densidade do material do eixo
MD
-
Massa de cada disco do pacote dividido
LD
-
Comprimento de cada disco do pacote dividido
ItD
-
Momento de inércia de massa transversal de cada disco do pacote
IpD
-
Momento de inércia de massa polar de cada disco do pacote dividido
E_pct -
Módulo de elasticidade do pacote de chapas
G_pct -
Módulo de elasticidade ao cisalhamento do pacote de chapas
Kc
-
Rigidez total das molas de interface
L/D
-
Relação comprimento por diâmetro do elemento
[Θ ]
-
Modos naturais de vibrar do sistema
xvi
λ
-
Autovalores do sistema
ω
-
Freqüências naturais do sistema
LCH
LEIXO
-
Razão entre o comprimento do pacote de chapas e o comprimento do
φCH
φE
-
φCO
φE
-
H CO
RE
-
MT
M EIXO
-
LCH
-
eixo
na região do pacote
φ CO
Razão entre o diâmetro da coroa do pacote de chapas e o diâmetro do
eixo na região do pacote
φ CH
LCH
Razão entre o diâmetro externo do pacote de chapas e o diâmetro do eixo
-
Razão entre a altura da coroa e o raio do eixo na região do pacote
Razão entre a massa total do pacote de chapas e a massa do eixo
Razão entre o comprimento e o diâmetro externo do pacote de chapas
Razão entre o comprimento e o diâmetro da coroa do pacote de chapas
Capítulo 1 Introdução
1
1 INTRODUÇÃO
Durante a etapa de projeto mecânico de qualquer máquina rotativa, todos os
requisitos funcionais do equipamento devem ser definidos de forma a garantir a sua
durabilidade, confiabilidade de operação, desempenho e aceitabilidade no ambiente
no qual será instalada. Para as máquinas comercialmente mais comuns, a maioria
desses requisitos funcionais é normatizada, sendo que uma parte deles está
relacionada à maneira com a qual máquina irá vibrar quando estiver em operação
(EHRICH, 2004).
Há mais de 100 anos, grandes esforços têm sido realizados para modelar este
tipo de sistema e para estabelecer critérios seguros e factíveis, que permitiram
projetar equipamentos com potências bastante elevadas (NELSON, 2003). As
normas API (American Petroleum Institute) destinadas a equipamentos que operam
em plataformas de petróleo são excelentes referências com requisitos de cálculo e
critérios de aceitação do projeto de várias classes de máquinas rotativas, tais como
turbinas, máquinas elétricas e compressores. No entanto, obter, na fase de projeto o
comportamento dinâmico de uma máquina rotativa não é uma tarefa muito fácil, pois
depende de uma boa ferramenta de CAE (Computer-Aided Engineering) e de um
amplo conhecimento do sistema a modelar.
Com base neste contexto, é inserida a necessidade deste e de outros trabalhos
da área de dinâmica de rotores. O melhor conhecimento do sistema permite reduzir
o número de restrições aplicadas para se obter um projeto seguro do ponto de vista
dinâmico, permitindo um melhor aproveitamento de todo o potencial que o
equipamento poderia oferecer. A prova disto são alguns exemplos de máquinas que
operam acima da primeira ou mesmo da segunda rotação crítica, com a mesma
segurança e durabilidade de máquinas que operam no regime bem abaixo da
primeira rotação crítica (este último também chamado de regime rígido).
As máquinas elétricas girantes também fazem parte desta realidade, sendo
possível encontrar casos em que o rotor opera muito próximo de sua primeira
rotação crítica. Para tal, é realizada uma análise dinâmica completa da máquina,
incluindo o rotor, os mancais, a fundação, forças de excitação entre outros
Capítulo 1 Introdução
2
(SANTOS, 2008; API 684, 2005). A Figura 1.1 mostra o exemplo de um motor
síncrono de 18.000 hp de potência, que opera próximo da primeira rotação crítica do
rotor, que foi avaliado nas fases de projeto e de testes usando os critérios definidos
na norma API 541 (2004).
Figura 1.1 – Motor síncrono de 18.000 hp que opera próximo da primeira rotação
crítica do rotor (Cortesia WEG Equipamentos Elétricos – Divisão Energia).
O conhecimento atual em dinâmica de rotores já permitiu um avanço muito
grande na concepção dos projetos de sistemas rotativos. Apesar disto, o grande
potencial para o desenvolvimento de alguns pontos críticos da análise dinâmica,
motivam a realização deste trabalho. Mais especificamente, o estudo da forma
utilizada para modelar o núcleo laminado de rotores de máquinas elétricas, que
mesmo tendo uma importância fundamental na característica dinâmica do sistema,
conta com uma literatura muito escassa.
A pesquisa desenvolvida neste trabalho tem uma característica exploratória, na
qual experimentos e observações são usados para definir e testar hipóteses na
concepção de modelos de viga equivalente para representar rotores de máquinas
elétricas. Por causa dessa peculiaridade, o conteúdo foi apresentado com uma
ordem que mantivesse a seqüência natural em que foi investigado, descrevendo-se
inicialmente todo o contexto envolvido no problema, para só em seguida defini-lo.
Capítulo 1 Introdução
1.1
3
Aspectos Construtivos de Máquinas Elétricas Girantes
1.1.1 Elementos básicos de uma máquina elétrica
Uma máquina elétrica é composta por duas partes principais: a estacionária,
chamada de estator e a parte rotativa, denominada de rotor. Estas duas partes são
separadas por uma pequena folga denominada de entreferro (KOSTENKO e
PIOTROVSKI, 1979).
O estator consiste basicamente de uma carcaça de aço ou ferro fundido que
aloja um cilindro oco formado por um pacote de chapas empilhadas. Um conjunto de
canais igualmente espaçados ao longo do perímetro interno do cilindro de chapas,
chamados de ranhuras, fornece o espaço para inserção das bobinas de fios de
cobre que formam o enrolamento do estator (Figura 1.2).
(a)
(b)
Ranhuras
Estator
bobinado
inserido na
carcaça
Figura 1.2 – Representação simplificada de um estator de máquina elétrica
(a) o pacote de chapas do estator; (b) o pacote dentro da carcaça
(Cortesia WEG Equipamentos Elétricos – Divisão Energia).
O pacote ou núcleo laminado do rotor também é um cilindro oco composto por
um conjunto de chapas de aço empilhadas, com canais axiais ao longo do perímetro
externo, que alojam o enrolamento do rotor. Este pacote é montado com
Capítulo 1 Introdução
4
interferência sob um eixo de material maciço que ficará apoiado pelos mancais que
estão ligados ao estator da máquina (Figura 1.3).
Figura 1.3 – Representação esquemática de um rotor de máquina elétrica (eixo +
pacote de chapas sem enrolamento).
1.1.2 Tipos de rotores
Os rotores de máquinas elétricas girantes podem ser separados em duas
grandes classes: rotores de gaiola e rotores bobinados. Uma subclassificação ainda
pode ser aplicada, conforme apresentada no diagrama da Figura 1.4 (WILD, 2002).
ROTORES DE
GAIOLA
Barras de Cobre
Barras de Alumínio
Injetado
Com canais radiais
ROTORES
BOBINADOS
Pólos Lisos
Pólos salientes
Sem canais radiais
Figura 1.4 – Classificação, baseada em WILD (2002), dos tipos de rotores de
máquinas elétricas girantes.
Capítulo 1 Introdução
5
A pesquisa apresentada nesse trabalho é restrita apenas aos rotores de gaiola,
nos quais foram desenvolvidos todos os experimentos. A escolha deve-se
principalmente à grande demanda de máquinas com estes tipos de rotores.
Basicamente, a construção de rotores com barras de cobre pode ser resumida
nos seguintes passos: (a) inicialmente o eixo da máquina é posicionado em uma
ferramenta específica para mantê-lo fixo, que é feito normalmente em uma prensa
vertical. (b) O disco de prensar, com uma espessura muito maior do que das chapas,
é montado com interferência sob eixo na posição que delimita e serve de apoio para
uma das extremidades do pacote. (c) As chapas, com o perfil semelhante ao
apresentado na Figura 1.5, são aquecidas e montadas sob o eixo com uma
interferência da ordem de décimos de milímetros. Essas chapas têm espessura da
ordem de 0,6mm e são empilhadas uma a uma mantendo-se o alinhamento entre as
ranhuras através de um rasgo de chaveta. (d) Após empilhar todas as chapas, é
inserido o segundo anel de prensar na extremidade oposta àquela em que foi
colocado o primeiro. Sob esses dois anéis é aplicada uma força de compressão da
ordem de 15tf no sentido longitudinal do eixo. Essa força compacta as chapas
formando um cilindro de bloco único que é chamado de pacote de chapas ou núcleo
laminado ou núcleo magnético do rotor. Ainda na prensa, o último anel de prensar é
travado e o pacote é resfriado para garantir a união com o eixo. (e) As barras de
cobre, com comprimento um pouco maior que o pacote de chapas, são inseridas nos
canais axiais deixados pelas ranhuras. As extremidades das barras são usinadas
para garantir o alinhamento e, sobre ambas, são soldados os dois anéis de curto de
cobre fechando um circuito elétrico para a passagem da corrente induzida pelo
estator. Se essa montagem fosse vista sem o pacote de chapas se assemelharia a
uma gaiola, e por esta razão dá o nome a esses tipos de rotores (Figura 1.6).
Capítulo 1 Introdução
6
Ranhuras
φCH
φCOR
H COR
φE
Figura 1.5 – Geometria esquemática de uma chapa de rotor
( φCH :diâmetro externo da chapa;
coroa;
H COR :altura
da coroa;
φCOR :diâmetro
φE :diâmetro externo do eixo)
(a)
(b)
(c)
(d)
(e)
Figura 1.6 – Seqüência de montagem do rotor com gaiola de barras de cobre
da
Capítulo 1 Introdução
7
A diferença entre os rotores de gaiola de cobre sem e com canais radiais de
ventilação é que nos primeiros as chapas são empilhadas formando um bloco único
de pacote, enquanto que naqueles com canais radiais, pequenas pilhas de chapas
são montadas com separadores, formando setores de pacotes (Figura 1.7).
Figura 1.7 – Rotor de barras de cobre (com canais radiais)
Os rotores de gaiola de alumínio injetado têm uma construção um pouco
diferente. (a) As chapas são inicialmente alinhadas em uma ferramenta específica,
que consiste de um pino guia no qual elas são empilhadas formando os canais
axiais. (b) Esse conjunto é levado à injetora e montado nas partes inferior e superior
do molde de injeção. (c) Uma força de compactação da ordem de 300tf é aplicada
sob o conjunto de forma a garantir um bloco único de chapas que não tenha fendas
para deixar fluir o alumínio a ser injetado. (d) O alumínio fundido é injetado sob alta
pressão pelos canais do molde superior e/ou inferior e deve preencher todos os
vazios do molde e os canais radiais do pacote de chapas. (e) Alguns minutos após
todo o alumínio já ter sido fundido, os moldes são retirados e o núcleo laminado é
extraído. Neste caso já resulta o pacote totalmente formado em um bloco único,
moldado com as barras e os anéis de curto nas duas extremidades. (f) Esse
conjunto é então removido da injetora e, ainda quente, é colocado em uma prensa
na qual será inserido o eixo, completando a construção do rotor. A Figura 1.8
apresenta um rotor injetado montado sobre o eixo, com um corte no pacote para
mostrar as barras de alumínio fundido.
Capítulo 1 Introdução
8
Figura 1.8 – Rotor injetado
1.2
Problemática
O pacote de chapas empilhadas que é montado sobre o eixo da máquina, além
de massa e inércia, adiciona uma parcela de rigidez que tem grande influência sobre
o comportamento dinâmico do rotor. Dependendo da forma como o rotor foi
construído e das suas características geométricas, este efeito de enrijecimento pode
ser maior ou menor. Em uma validação experimental preliminar, constatou-se para
um caso de erro de 30% no cálculo da primeira freqüência natural de um rotor,
quando foi desconsiderado qualquer efeito de enrijecimento do pacote laminado
(SANTOS, 2007).
Baseado nos aspectos construtivos que foram descritos no item anterior, o
seguinte contexto problemático pode ser colocado:
a) Supondo inicialmente que o pacote fosse composto por um cilindro maciço ao
invés de laminado, qual seria a relação da interferência existente entre o cilindro e o
eixo com a parcela de enrijecimento a ser aplicada? Mesmo esta questão sendo
Capítulo 1 Introdução
9
devidamente respondida, existe um segundo complicador: como controlar ou
quantificar a interferência real entre o pacote e o eixo durante o processo produtivo
do rotor? Para o rotor com barras de cobre esse controle parece mais simples, visto
que as chapas são colocadas uma a uma sobre o eixo, garantindo, de certa forma,
uma interferência constante e mensurável. O mesmo não se pode afirmar sobre os
rotores de alumínio injetado, pois o pacote é empilhado e compactado em um
dispositivo intermediário que nunca garante um alinhamento das chapas na direção
longitudinal. Quando o eixo é inserido, as chapas que não estão devidamente
concêntricas irão se deformar alterando toda uma condição teórica da interferência
entre o pacote e o eixo. No final do processo, a interferência sempre existirá,
contudo, é bastante aleatória, o que dificulta quantificá-la adequadamente.
b) O segundo aspecto importante é como determinar o módulo de elasticidade de
um conjunto de chapas laminadas. Dois trabalhos de Garvey e colaboradores
(GARVEY, 1989 e GARVEY et al., 2004) discutem formas de modelar os pacotes
laminados usando um elemento ortotrópico, com um módulo de elasticidade para a
direção normal à laminação e outro para a direção paralela à laminação. Para as
deformações que ocorrem no plano normal ao da laminação, poderia se esperar
uma rigidez mecânica do pacote equivalente aquela de um material sólido
(assumindo um fator de empacotamento igual a um)1. Já no sentido da laminação, o
módulo de elasticidade é muito menor se comparado com o de um material maciço,
sendo função direta da pressão de compactação usada para formar o pacote de
chapas. Usar essa abordagem implicaria em utilizar um modelo numérico de
elementos finitos capaz de contemplar a anisotropia, e ainda a necessidade de
realizar uma identificação experimental dos parâmetros de módulos de elasticidade
(GARVEY, 1989).
c) O terceiro aspecto é a verdadeira interação entre o pacote de chapas e o eixo,
que depende não somente de uma boa caracterização do elemento anisotrópico e
1
O fator de empacotamento é dado pela razão LCH
chapa e
χ
o número de chapas do pacote.
/ (hχ ) . Sendo LCH o comprimento total do pacote, h a espessura de cada
Capítulo 1 Introdução
10
da interferência, mas também da relação geométrica entre esses dois elementos e
do modo de vibrar que se está analisando.
Esta situação problemática é discutida nos momentos pertinentes durante o
desenvolvimento deste trabalho. Contudo, seu conhecimento é relevante para
entender a definição do problema proposto e avaliação do que foi implementado.
1.3
Revisão Bibliográfica
Apesar de algumas versões de programas comerciais de elementos finitos
permitirem elementos tridimensionais para analisar a dinâmica do rotor, o artifício
técnico mais comum é utilizar um modelo de viga equivalente para modelar este tipo
de problema. LALANNE e FERRARIS (1990) apresentam as matrizes com as quais
é possível analisar a dinâmica de um sistema de rotor girante composto por eixo,
mancais e discos. Os mancais adicionam rigidez e amortecimento enquanto os
discos contribuem com massa e inércia, ambos nas posições dos nós
correspondentes das matrizes globais. O eixo é representado usando um modelo de
viga de Euler-Bernoulli, com um fator para incluir o cisalhamento transversal. Os
discos, quando montados com interferência sobre o eixo, agregam determinada
rigidez que é computada aumentando-se o diâmetro do eixo de uma quantidade
igual à espessura do disco. Este acréscimo de diâmetro é aplicado somente na
região do eixo no qual se situa o disco e é válido para discos de pequena espessura.
Sendo que nada é afirmado sobre cilindros longos.
A norma API 684 (2005), que contém um tutorial com boas práticas para o
projetista fazer um modelo de dinâmica de rotores, afirma ser um grande desafio
determinar essa quantidade de rigidez adicional do pacote e recomenda a seguinte
aproximação: considerar um diâmetro externo do eixo na região do pacote de tal
forma que a massa adicional seja igual à massa do núcleo laminado. Este novo
diâmetro “equivalente” é utilizado para considerar a rigidez adicional do pacote
laminado sob o eixo.
Em KIM e KIM (2006) é apresentado um estudo experimental sobre a relação
entre a pressão de empacotamento que é utilizada na montagem do pacote de
Capítulo 1 Introdução
11
chapas e o aumento percentual que deve ser aplicado no diâmetro base do eixo
para considerar o efeito de enrijecimento. O exemplo estudado trata de um rotor de
642kg constituído apenas do eixo e do pacote de chapas, sem as ranhuras. Com
uma interferência de 0,01mm entre o diâmetro externo do eixo e interno do pacote,
sem consideração do efeito da rotação e temperatura, o autor recomenda um
aumento do diâmetro do eixo de 18 a 25% da diferença entre o diâmetro externo e
interno da chapa. As conclusões foram baseadas em um experimento que
determinou as três primeiras freqüências naturais do rotor na condição livre-livre,
repetido para vários valores de pressão de empacotamento. Outra informação é que
o aumento da pressão de empacotamento sempre implicaria em um aumento do
diâmetro equivalente, sendo que este último valor satura à medida que se aumenta
muito a pressão de empacotamento.
Em CHEN et al. (2008) é feita uma proposta mais abrangente para modelar
todo o sistema de uma máquina elétrica. O autor utiliza um modelo com elementos
finitos de viga em paralelo (eixo e pacote de chapas) para representar o rotor com
núcleo laminado. Os elementos são conectados nó a nó por um conjunto molaamortecedor, cuja rigidez de contato é da ordem de 109N/m e o amortecimento é
desprezado. As propriedades do material do pacote de chapas foram ajustadas
experimentalmente usando medições de freqüência natural do rotor em condição
livre-livre. No modelo identificado, o módulo de elasticidade do eixo e do pacote
laminado são, respectivamente, 225GPa e 15GPa, enquanto que os módulos de
cisalhamento valem 88GPa e 6GPa, supondo-se um coeficiente de Poisson de 0,28
para ambos os materiais.
GARVEY et al. (2004) propõem a construção de um modelo com material
ortotrópico para representar o pacote laminado, através de uma nova definição do
estado de tensão-deformação que considera a flexibilidade da interface entre as
chapas do pacote laminado. Duas configurações são investigadas. Na primeira delas
os elementos de eixo e de pacote são superpostos de forma que suas extremidades
são conectadas pelos mesmos nós, sendo esta abordagem chamada de modelo
não-ramificado. A segunda proposta é utilizar elementos em paralelo, conectados
por molas e amortecedores, semelhante ao que foi feito por CHEN et al. (2008)
denominado de modelo ramificado.
Capítulo 1 Introdução
12
Para os casos em que o rotor possui um eixo costelado na região do pacote,
alguns autores, tais como NETO et al. (2006), desprezam o efeito de enrijecimento
do núcleo laminado e consideram somente a contribuição de massa e inércia. No
estudo feito em uma máquina montada, o erro do modelo em relação ao
experimental foi avaliado somente para o primeiro modo de vibrar do rotor. O efeito
de enrijecimento não se mostrou relevante; ao invés disso, o resultado acabou
sendo bastante influenciado pela rigidez da fundação da máquina. Esta configuração
de rotor não foi avaliada na presente dissertação.
Um exemplo bastante particular da importância de se ter um bom modelo do
núcleo laminado é apresentado em EDE et al. (2002). Os autores estudam um
modelo numérico em elementos finitos 3D de um rotor de pequenas dimensões, com
núcleo laminado que equipa um motor cuja rotação nominal é de 120.000rpm. O
rotor é composto de um eixo com um núcleo laminado que, ao invés de barras de
cobre ou alumínio, a gaiola é formada com barras de imã permanente. O rotor foi
representado por um material totalmente anisotrópico e, no modo que se observa
uma maior parcela de flexão do pacote se comparada ao do eixo, os autores
obtiveram um erro de cálculo de 5% no cálculo da respectiva freqüência natural.
Em todos os trabalhos que propõem algum modelo equivalente para o rotor
com núcleo laminado, a identificação de parâmetros foi realizada usando
experimentos de análise modal, dos rotores nas condições livres de apoios. Este tipo
de metodologia pode ser encontrado em outros trabalhos, como por exemplo, em
TADEO (2003). O autor usa um ajuste por MMQ (método de mínimos quadrados)
das curvas de inertância de um sistema para identificar os parâmetros de um modelo
equivalente para acoplamentos.
Por fim, usando a pesquisa bibliográfica realizada, três modelos de viga foram
escolhidos para serem avaliados neste trabalho. Esses modelos são descritos na
Seção 1.4 e detalhados e avaliados ao longo desta dissertação.
Capítulo 1 Introdução
1.4
13
Definição do Problema, Objetivos e Organização do Trabalho
Os modelos de viga equivalente de todos os trabalhos descritos anteriormente
necessitam de um valor de parâmetro para quantificar o efeito de enrijecimento do
pacote
de
chapas
sob
o
eixo.
Este,
muitas
vezes
foi
determinado
experimentalmente, e avaliado apenas para um caso de rotor como, por exemplo,
em GARVEY et al. (2004). Foi constatado, também, que para cada modo de vibrar
do rotor é necessário ajustar um valor de parâmetro diferente para se calcular a
freqüência natural.
O intuito inicial é então verificar se, com um mesmo modelo de viga e usando
apenas um valor de parâmetro, é possível representar diferentes geometrias e/ou
modo de vibrar de rotores de gaiola.
A solução do problema foi restrita a avaliar três versões de modelos de viga,
baseando-se no que foi encontrado na literatura: (i) utilização de um diâmetro
equivalente na região do pacote laminado, denominado de “modelo com diâmetro
equivalente”, (ii) emprego de um elemento finito para representar o pacote, o qual é
unido diretamente ao elemento que representa o eixo, chamado de “modelo não
ramificado” e (iii) utilização de um elemento finito para representar o pacote, unido
através de molas ao elemento que representa o eixo, sendo este denominado de
“modelo ramificado”.
O objetivo geral do trabalho é, portanto, implementar os três modelos de viga
equivalente usando elementos finitos, realizar os experimentos necessários e avaliar
o comportamento dos modelos numéricos para o caso de rotores com características
construtivas diferentes.
O texto da dissertação está organizado na forma descrita a seguir. No
Capítulo 2 é colocada a fundamentação teórica com a definição dos elementos de
viga e de ligação que são utilizados. No Capítulo 3 é descrita a implementação e a
parametrização dos modelos. Para facilitar o desenvolvimento e análise, foi utilizado
o software comercial de elementos finitos ANSYS como ferramenta de cálculo.
Contudo, é importante ressaltar que, com as informações aqui fornecidas, toda a
análise computacional pode ser reproduzida usando outro programa de elementos
Capítulo 1 Introdução
14
finitos, ou mesmo realizar as implementações em linguagens de alto nível como
Fortran, C++ ou nas plataformas Matlab ou Scilab. Ainda no Capítulo 3, são descritos
os experimentos e apresentados os resultados das análises modais realizadas nos
vários rotores de gaiola que foram escolhidos. No Capítulo 4 são apresentados os
erros obtidos com os três modelos na representação da dinâmica dos rotores
testados, que são, em seguida, avaliados quanto a sua precisão e robustez.
Baseado nas observações anteriores, ainda no Capítulo 4, é feita uma discussão
dos resultados com a finalidade de compreender melhor o fenômeno. O Capítulo 5
conclui o trabalho e apresenta as sugestões de trabalhos futuros com hipóteses e
implementações que poderiam ser estudadas. Alguns assuntos adicionais e outros
necessários para o desenvolvimento do trabalho foram colocados nos anexos: a
macro em linguagem APDL (Ansys Parametric Design Language – ANSYS, 2007),
usada no software Ansys para implementação dos modelos de viga; os modos de
vibrar de cada rotor obtido experimentalmente e aqueles calculados com o melhor
parâmetro.
15
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
2 ELEMENTOS FINITOS UTILIZADOS NA REPRESENTAÇÃO DO
ROTOR
O objetivo deste capítulo é apresentar as matrizes dos diversos elementos
finitos utilizados no presente trabalho para a representação do rotor, de forma que
os modelos aqui desenvolvidos e testados possam ser facilmente implementados
por outrem.
2.1
Equação do Movimento
O comportamento dinâmico dos rotores de máquinas girantes pode ser
modelado através do método dos elementos finitos. Para tal, usualmente são
utilizados elementos de viga para representar o eixo, elementos rígidos de inércia
para representar os componentes montados sobre o eixo (denominados, de forma
genérica, de discos) e elementos de mola e amortecedor para os mancais e
fundação, no caso desta última ser levada em consideração (GENTA, 2005).
As equações do movimento para um sistema girante podem ser obtidas a partir
da aplicação das equações de Lagrange, dadas, por exemplo, em LALANNE e
FERRARIS (1990):
d ∂T
dt ∂q& i
∂T ∂U
−
+
= fi
∂q i ∂q i
,
Eq. 2.1
sendo T a energia cinética, U a energia de deformação, fi as forças generalizadas
que atuam sobre o sistema, qi os deslocamentos generalizados e i = 1 a n a
indicação dos graus de liberdade. Note-se que o ponto simboliza a diferenciação em
relação ao tempo t, assim q&i representa as velocidades generalizadas.
As expressões da energia cinética T e potencial U em função dos
deslocamentos e velocidades generalizados são obtidas para cada um dos
elementos do rotor (viga, disco, mola-amortecedor, etc.) e introduzindo-as na Eq. 2.1
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
16
e fazendo a superposição dos graus de liberdade, obtém-se a equação do
movimento, a qual, em forma matricial, para um sistema linear, é dada por
[M ]{q&&(t )} + ([C] + [G ]){q& (t )} + [K ] {q(t )} = {f (t )},
Eq. 2.2
sendo [ M ] a matriz de inércia ou massa, [ K ] a matriz de rigidez, [C] a matriz de
amortecimento,
[G ] a matriz giroscópica, {f (t )} o vetor de forças nodais
generalizadas, {q(t )} o vetor de deslocamentos nodais, {q& (t )} o vetor de velocidades
nodais e {q&&(t )} o vetor de acelerações nodais.
A seguir são apresentadas as matrizes elementares de rigidez, massa e
giroscópica para os diversos tipos de elementos finitos utilizados na modelagem do
rotor. A matriz de amortecimento do eixo não é apresentada, pois, no presente
estudo o amortecimento foi desprezado. São apresentados aqui, e foram
considerados nas análises, apenas efeitos do movimento lateral do rotor, sem os
deslocamentos axiais e torcionais.
2.2
Matrizes de Rigidez, Massa e Giroscópica dos Elementos Usados nos
Modelos de Viga Equivalente
2.2.1 Elemento de viga de Timoshenko de classe C0 com interpolação
quadrática
O elemento de viga de Timoshenko é utilizado para representar o eixo e o
núcleo laminado. Na teoria de Timoshenko, a principal premissa é que mesmo após
a viga estar fletida, a sua seção transversal permanece uma superfície plana.
Contudo, não está em uma direção normal à linha centroidal da viga. A Figura 2.1
apresenta a cinemática de deformação de um ponto P em uma viga de Timoshenko.
17
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
y
γxy ψ
P
∂w
∂x w
uz
uy
∂v
∂x
x
v
γxz
P
x
−φ
z
(a)
(b)
Figura 2.1: Cinemática de deformação de uma viga de Timoshenko nos planos xy (a)
e xz (b). γ representa a deformação cisalhante transversal.
A partir das hipóteses de Timoshenko, o campo de deslocamentos é
aproximado por (GMÜR e RODRIGUES, 1991)
u x ( x, y, z ) = − yψ ( x) + zφ ( x)
;
u y ( x, y , z ) = v ( x )
;
Eq. 2.3
u z ( x, y, z ) = w( x)
Os deslocamentos v e w e as rotações ψ e φ, bem como as correspondentes
velocidades, são aproximados através de seus valores nodais, utilizando funções de
interpolação quadráticas2. Assim:
v( x) = N1 ( x)v1 + N 2 ( x)v 2 + N 3 ( x)v 3
w( x) = N1 ( x) w1 + N 2 ( x) w2 + N 3 ( x)w3
Eq. 2.4
φ ( x) = N1 ( x)φ 1+ N 2 ( x)φ 2+ N 3 ( x)φ 3
ψ ( x) = N1 ( x)ψ 1+ N 2 ( x)ψ 2+ N 3 ( x)ψ 3 ,
sendo N i as funções de interpolação dadas por
[ N1
2
N2
2
x 2x
2x
N 3 ] = − 1 −
1−
L
L
L
Note que neste elemento as rotações
φ eψ
x 2 x
1 +
L
L
Eq. 2.5
.
são interpoladas independentemente dos deslocamentos transversais v e w.
18
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
O elemento finito possui três nós com quatro graus de liberdade cada um, cujo
vetor de deslocamentos nodais é dado por
{q} = [v1
w1 φ1 ψ 1 M v2
w2 φ2 ψ 2 M v3
w3 φ3 ψ 3 ]
Eq. 2.6
,
sendo vi e wi os deslocamentos nas direções y e z, respectivamente e φi e ψi as
rotações da seção transversal correspondentes. A Figura 2.2 apresenta os graus de
liberdade deste elemento.
L
y
v1
v2
v3
φ3
φ2
φ1
ψ1
ψ2
z
w1
w2
ψ3
x
w3
Figura 2.2: Graus de liberdade do elemento de viga de Timoshenko com três nós
Por essas definições obtém-se a matriz de rigidez elementar, que é
apresentada em duas parcelas: [Kfel] representando o efeito de flexão e [Kcel] o
efeito de cisalhamento transversal3. Nesse caso,
0
0
0
0
0
EI 0
[Kf el ] =
3L 0
0
0
0
0
0
3
0
0
0
7
0
0 0
0 0
0 −8
0
0
0
0
0
0
0
0
1
0
7
0
0
0
0
0 0
0 0
−8 0 0
0 0 0
0 0 0
0
1
0 0
0 0
sim.
16
0 16
0
0
0
0
0
0 0
−8 0
0 0 7
0 − 8 0 0 0 7
Eq. 2.7
A matriz [Kcel] foi obtida aplicando-se a técnica de sub-integração com o objetivo de eliminar o fenômeno de travamento
(locking) de cisalhamento transversal do elemento (HUGHES,2000).
19
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
7
L
0
0
− 3
2
− 8
L
0
GSµ
[Kcel ] =
3 0
− 2
1
L
0
0
1
2
7
L
3
2
L
3
0
0
L
3
0
0
2
−8
L
16
L
−2
0
0
16
L
−2
L
3
0
0
0
4L
3
0
0
0
0
1
L
−1
2
1
2
−L
6
0
0
sim.
L
3
−1
2
0
0
0
−8
L
4L
3
0
0
2
7
L
0
0
0
0
0
0
0
0
−L
6
−2
L
3
3
2
−8
−2
L
L
2
3
0
0
7
L
−3
2
L
3
0
0
L
3
Eq. 2.8
sendo E módulo de elasticidade do material, L o comprimento do elemento, S a área
da seção transversal, I o momento de inércia da seção transversal e G o módulo de
elasticidade ao cisalhamento. O termo µ é o fator para corrigir a distribuição das
tensões cisalhantes transversais, que é uma função da forma da seção e do
coeficiente de Poisson ν do material (BATHE, 1996). Note-se que já foi considerada
uma seção circular, de forma que os momentos de inércia em relação aos eixos y e z
são iguais, denominados por I. Esta matriz também já contém os termos relativos as
inércia de rotação das seções transversais.
A matriz de massa é dada por:
2S
0
0
0
S
0
0
[M el ] = Lρ 0
15
− S
2
0
0
0
2S
0
2I
0
0
2I
0
0
0
S
0
0
0
8S
0
I
0
0
0
8I
0
0
I
0
0
0
8I
0
0
0
S
0
0
0
2S
0
0
0
S
0
0
0
2S
0
0
0
I
0
0
0
2I
−I
2
0
0
0
I
0
0
0
−S
2
0
0
−I
2
0
sim
8S
2S
Eq. 2.9
20
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
e a matriz giroscópica por:
0 0
0
ILρΩ
[Gel ] =
15
0
0
0
0 0 0 0
0 0 0 0
−4 0 0 0
0
Anti
sim.
0
0
−2
0 0 2
0
0 0 0
0
0 0
0
0 − 16
0
0 0
0 0
0 0
0
0
0
0
0
0
0
0
0
0
0
0
0
−1 0
0
0
0
0
0 − 2
2
0
0
0
0
0
0 − 4
0
0
0
0
0
0
1
Eq. 2.10
sendo ρ a densidade do material e Ω a freqüência de rotação do rotor em torno do
eixo X (axial). A dedução completa para obter as matrizes acima pode ser
encontrada em CARVALHO et al. (2007).
2.2.2 Elemento de viga de Timoshenko de classe C1 (ou Euler-Bernoulli
corrigido para incluir cisalhamento)
O elemento de viga de Timoshenko de classe C1 foi colocado como segunda
opção para representar o núcleo laminado. Com este tipo elemento pode-se avaliar
um modelo incluindo-se ou não o efeito do cisalhamento transversal. O
equacionamento para este elemento foi baseado em GENTA (2005), BAZOUNE e
KHULIEF (2003), ALVES FILHO (2000) e NELSON (1980).
A mesma Figura 2.1 pode ser utilizada para descrever a cinemática de
deformação do modelo de viga, contudo, os graus de liberdade de translação e
rotação agora são correlacionados. O campo de deslocamentos é escrito da
seguinte forma
∂v( x)
∂w( x)
−z
∂x
∂x
u y ( x, y , z ) = v ( x ) ;
u x ( x, y , z ) = − y
u z ( x, y, z ) = w( x)
;
Eq. 2.11
21
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
Os deslocamentos (v, w) são compostos pela soma de duas parcelas, (vF, wF)
devido a flexão e (vC, wC) devido ao cisalhamento, tal que
∂v ∂v F ∂vC
=
+
= φ + γ xy ,
∂x
∂x
∂x
Eq. 2.12
∂w ∂wF ∂wC
=
+
= −ψ + γ xz
∂x
∂x
∂x
Quando o cisalhamento não é considerado, as rotações são iguais às
derivadas do deslocamento, visto que os valores de γxy e γyz são iguais a zero. Nesta
situação, tem-se o elemento representado pela teoria clássica de viga de EulerBernoulli, sendo que agora a seção transversal da viga deformada, além de
permanecer uma superfície plana, está em uma direção normal à linha centroidal da
viga.
Os deslocamentos v e w e as rotações ψ e φ bem como as correspondentes
velocidades são aproximadas através de seus valores nodais e de funções de
interpolação4, na forma
v1
v( x) N11 ( x) N 12 ( x) N 13 ( x) N14 ( x) ψ 1
=
ψ ( x) N 21 ( x) N 22 ( x) N 23 ( x) N 24 ( x) v2
ψ 2
Eq. 2.13
w1
w( x) N11 ( x) N12 ( x) N13 ( x) N14 ( x) − φ1
=
− φ ( x) N 21 ( x) N 22 ( x) N 23 ( x) N 24 ( x) w2
− φ 2
,
4
Note-se que neste elemento os graus de liberdade não são interpolados de forma independente. Existe uma relação entre o
deslocamento transversal v e a rotação ψ e entre o deslocamento w e a rotação
φ.
22
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
sendo N i as funções de interpolação associadas ao grau de liberdade qi , dadas por
(GENTA, 2005 ou BAZOUNE e KHULIEF, 2003)
1 + Φ (1 − ( x L )) − 3( x L ) + 2( x L )
1+ Φ
2
N 11 ( x) =
N 12 ( x) = x
3
1 + 1 2 Φ (1 − ( x L )) − 2( x L ) + ( x L )
1+ Φ
N 13 ( x) = ( x L )
N 14 ( x) = x
Φ + 3(x L ) − 2( x L )
1+ Φ
N 21 ( x) =
2
N 22 ( x) =
6( x L ) ( x L ) − 1
1+ Φ
L
1 + Φ (1 − ( x L )) − 4( x L ) + 3( x L )
1+ Φ
2
N 23 ( x) = −
− 1 2 Φ (1 − ( x L )) − ( x L ) + (x L )
1+ Φ
2
N 24 ( x) =
6( x L ) ( x L ) − 1
1+ Φ
L
Φ ( x L ) − 2( x L ) + 3(x L )
1+ Φ
Eq. 2.14
2
onde Φ é o fator de correção devido ao cisalhamento transversal, dado por
Φ=
12 EI
GS * L2
,
Eq. 2.15
sendo S* denominada de área efetiva ao cisalhamento da seção transversal, a qual é
relacionada com área real por:
S * = µS
Eq. 2.16
O elemento possui dois nós com quatro graus de liberdade por nó, cujo vetor
de deslocamentos nodais é dado pela equação por
{q} = [v1
w1 φ1 ψ 1 M v 2
w2 φ 2 ψ 2 ] ,
T
Eq. 2.17
sendo vi e wi os deslocamentos nas direções y e z, respectivamente, e φi e ψi as
rotações da seção transversal correspondentes.
A Figura 2.3 apresenta os graus de liberdade do elemento de viga
23
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
L
y v
1
v2
φ2
φ1
z
ψ1
ψ2
x
w2
w1
Figura 2.3: Graus de liberdade do elemento de viga de Euler-Bernoulli
A matriz de rigidez elementar para este elemento é dada por
12
0
12
0
− 6L
6
L
0
[K el ] = EI 3
(1 + Φ )L − 12 0
− 12
0
0
− 6L
0
6 L
Sim.
(4 + Φ )L
2
0
0
6L
(2 − Φ )L2
0
(4 + Φ )L2
− 6L
0
0
(2 − Φ )L2
12
0
12
− 6L
0
− 6L
0
(4 + Φ )L2
0
2
(4 + Φ )L ,
Eq. 2.18
A matriz de massa do elemento é dada por
a
0
0
c
[M el ] = ρSL
b
0
0
− d
a
−c
e
0
0
e
0
0
d
b
−d
0
d
f
0
0
0
f
Sim.
a
0
a
0 −c e
0
0 e
c
Eq. 2.19
onde
13 7
1
6
2
+ Φ + Φ 2 + (r L )
3
5
a = 35 10
2
(1 + Φ )
Eq. 2.20
24
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
9
3
1
6
2
+ Φ + Φ 2 + (r L )
6
5
b = 70 10
2
(1 + Φ )
Eq. 2.21
11
11
1 2 1 1
2
210 + 120 Φ + 24 Φ + 10 − 2 Φ (r L ) L
c=
2
(1 + Φ )
Eq. 2.22
13
3
1 2 1 1
2
420 + 40 Φ + 24 Φ + 10 − 2 Φ (r L ) L
d=
2
(1 + Φ )
Eq. 2.23
1
1
1
1 2
2 1
2 2
2
105 + 60 Φ + 120 Φ + 15 + 6 Φ + 3 Φ (r L ) L
e=
2
(1 + Φ )
Eq. 2.24
1
1
1
1 2
1 1
2 2
2
140 + 60 Φ + 120 Φ + 30 + 6 Φ − 3 Φ (r L ) L
f =
2
(1 + Φ )
Eq. 2.25
sendo r o raio de giração da seção, definido por
r=
I
S
Eq. 2.26
A matriz giroscópica é dada por
0
− g
− h
0
[Gel ] = 2ΩρSL
0
g
− h
0
0
0
−h
0
−i
−g
0
0
−h 0
0
0 −h −g
0
j
h
−h
−j
0
0
0
Sim.
0
0
0
h
− i 0
Eq. 2.27
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
25
sendo
6 / 5r 2
L2 (1 + Φ )
Eq. 2.28
− (1 / 10 − 1 / 2Φ )r 2
L(1 + Φ )
Eq. 2.29
(2 / 15 + 1 / 6Φ + 1 / 3Φ 2 )r 2
(1 + Φ )2
Eq. 2.30
g=
h=
i=
− (1 / 30 + 1 / 6Φ − 1 / 6Φ 2 )r 2
j=
(1 + Φ )2
Eq. 2.31
Note que, fazendo Φ = 0 elimina-se o efeito do cisalhamento transversal, e
tem-se um elemento de viga de Euler-Bernoulli.
2.2.3 Matriz de massa e giroscópica para os discos
A matriz elementar de cada disco que é adicionado ao elemento de eixo
quando é necessário incluir algum elemento de massa ou inércia concentrada, é da
por:
m
0 m
[Md el ] =
0 0 I yy
0 0 0
I zz
,
Eq. 2.32
sendo m é a massa do disco e Iyy e Izz são os momentos de inércia de massa do
disco em relação aos eixos y e z, respectivamente.
A matriz giroscópica é dada por:
26
Capítulo 2 Elementos Finitos Utilizados na Representação do Rotor
0
0
[Gd el ] = Ω
0
0
0 0
0 0
0 0
0 I xx
0
0
− I xx
0
Eq. 2.33
,
sendo Ixx o momento de inércia de massa do disco em relação ao eixo X.
2.2.4 Matriz de rigidez do elemento de mola
Um elemento de mola unidimensional é usado quando é necessário incluir
algum elemento de ligação entre elementos de viga. Sua matriz é apresentada a
seguir, sendo k o valor de rigidez de cada mola.
1 − 1
− 1 1
[K el ] = k
Eq. 2.34
2.2.5 Montagem das matrizes globais
As matrizes elementares apresentadas acima são então agrupadas para obter
as matrizes globais de massa, giroscópica e rigidez. Monta-se o sistema usando
cada um dos elementos que formam o rotor, sendo feita em seguida a superposição.
Detalhes sobre superposição de matrizes podem ser encontrados em HUGUES
(2000) e COOK et. al. (2002), mas basicamente consiste em juntar as partes que
compõem o rotor, de modo que preserve a continuidade. Isto significa que os
deslocamentos em nós coincidentes deverão ser iguais, o que resulta em um
sistema algébrico de equações para o rotor a ser resolvido posteriormente. O
método de superposição é mais bem entendido com uso de exemplos, que podem
ser encontrados em HUTTON (2004).
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
3
27
DESCRIÇÃO DOS MODELOS DE VIGA EQUIVALENTE E
EXPERIMENTOS PARA VALIDAÇÃO
Neste capítulo são descritos os três modelos de viga equivalente propostos
para considerar a influência do pacote laminado sobre o comportamento dinâmico
do rotor. Em seguida, são apresentados os resultados das análises modais
experimentais em nove rotores diferentes para obtenção das freqüências naturais e
modos de vibrar. O objetivo é fornecer as informações que serão usadas para avaliar
o desempenho de cada modelo comparando-se os parâmetros modais calculados
com aqueles obtidos a partir de dados experimentais.
3.1
Descrição dos Modelos Numéricos de Viga Equivalente
Os modelos estudados se baseiam nos seguintes conceitos: acréscimo de
rigidez usando diâmetro equivalente, pacote com elemento de viga não ramificado e
pacote com elemento de viga ramificado.
3.1.1 Modelo 01: acréscimo de rigidez usando diâmetro equivalente
A abordagem mais conhecida/divulgada para modelar o rotor laminado é
utilizar um valor de diâmetro equivalente para o eixo na região do pacote de chapas.
Nesse modelo uma parcela do núcleo laminado é considerada como parte do eixo,
agregando além de massa e inércia, uma contribuição na rigidez total do rotor (KIM e
KIM, 2006).
O rotor com pacote da Figura 3.1(a) é composto por um conjunto de chapas
empilhadas de comprimento LCH, diâmetro φCH e massa MCH que inclui a massa das
barras de cobre ou alumínio. Os anéis de curto são iguais e tem comprimento LAC,
diâmetro externo φAC e massa MAC, sendo que seu CG (centro de gravidade) fica a
uma distância d da chapa extrema do pacote.
28
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
Na construção do Modelo 01, o diâmetro φE do eixo na região na qual estão
apoiadas as chapas é aumentado de um valor ∆φE (Figura 3.1(b)). Este acréscimo no
valor do diâmetro simula o efeito de enrijecimento do pacote laminado, semelhante
ao que foi apresentado por LALANNE e FERRARIS (1990) para considerar discos
montados com interferência no eixo. O novo diâmetro é denotado como φEQV e dado
por
φ EQV = φ E (1 + pt )
Eq. 3.1
sendo pt o acréscimo relativo aplicado ao diâmetro base do eixo, com pt variando de
0 a 1.
LAC
LCH
(a)
MAC
φCH
MCH
φAC
d
φE
...
Y
X
MAC, IAC
1
2
3
...
M D, I D
...
N
MAC, IAC
(b)
(c)
φCH
φEQV = φE + ∆φE
Figura 3.1: Esquema do pacote de chapas representado com diâmetro equivalente.
(a) modelo sólido (b) modelo sólido equivalente (c) modelo de viga equivalente
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
29
O restante do pacote laminado é então dividido em N discos, cujos valores de
massa e inércia são concentrados em nós do eixo criados na região do pacote,
enquanto os valores de massa e inércia dos anéis de curto são transladados para as
chapas extremas do pacote (Figura 3.1 (b)). Este conjunto é convertido em um
sistema de viga equivalente com os elementos de massas e inércias concentrados,
conforme representado na Figura 3.1 (c).
A massa adotada para a região do pacote de chapas, MCH, é a soma da massa
das chapas com a massa da gaiola, MT, excluindo a massa de cada anel de curto,
MAC. Assim,
M CH = M T − 2M AC .
Eq. 3.2
Contudo, essa massa ainda deve ser corrigida para descontar o aumento de
diâmetro do eixo na região do pacote. Dessa forma, a massa (MCH)’ a ser distribuída
entre os N discos é dada por
(M CH )
'
= M CH − ρ E LCH
(
π φ EQV 2 − φ E 2
4
),
Eq. 3.3
sendo ρE é a densidade do material do eixo.
A massa MD, o comprimento LD, o momento de inércia transversal ItD e o
momento de inércia polar IpD de cada disco podem ser escritas respectivamente da
seguinte forma (LALANNE e FERRARIS, 1990),
MD
'
(
M CH )
=
,
LD =
It D =
Eq. 3.4
N
LCH
,
N
Eq. 3.5
(
)
MD
2
2
2
3φCH + 3φ EQV + 4 LD ,
48
Ip D =
(
MD
φCH 2 + φ EQV 2
8
)
Eq. 3.6
Eq. 3.7
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
30
No modelo concebido da forma descrita acima, tem-se que o único parâmetro
variável é o diâmetro equivalente do eixo. KIM e KIM (2006) identificaram
experimentalmente que o valor do acréscimo pt varia de 0,28 a 0,36 dependendo do
modo de vibrar do rotor, para um protótipo cujas chapas não apresentam os furos
das ranhuras (ver Figura 1.5). Estes mesmos autores ainda estabeleceram um
segundo parâmetro para determinar o valor do diâmetro equivalente, baseado na
geometria da chapa, dado por
φ EQV = φ E + (φCOR − φ E ) pt
Eq. 3.8
Assim, o diâmetro equivalente é a soma do diâmetro do eixo com um
percentual de duas vezes a altura da coroa HCOR5, sendo H COR = (φCOR − φ E ) 2 . Por
esta definição, os autores obtiveram experimentalmente que o valor do acréscimo pt
varia de 0,17 a 0,23 dependendo do modo de vibrar do rotor.
Pela recomendação da norma API 684 (2005) citada no capítulo 01, o
acréscimo no diâmetro do eixo deve ser tal que a massa adicional seja igual à
massa do pacote MCH. Ou seja,
ρ E LCH
(
π φ EQV 2 − φ E 2
4
)=M
CH
Eq. 3.9
Isolando φ EQV ,
φ EQV =
4M CH
2
+ φE
πρ E LCH
Eq. 3.10
5
Como no protótipo utilizado por KIM e KIM (2006) a chapa do rotor não apresenta ranhuras, para compará-las diretamente ao
que foi desenvolvido nesta dissertação, optou-se por utilizar o diâmetro da coroa ao invés do diâmetro externo da chapa.
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
31
3.1.2 Modelo 02: pacote como elemento de viga não-ramificado
Nesta abordagem, o pacote de chapas é modelado como tubo contínuo com
propriedades elásticas equivalentes para simular o efeito da laminação (GARVEY et
al., 2004). Esse cilindro é montado de forma solidária sobre o eixo, resultando em
uma seção transversal com duas camadas de material de propriedades elásticas
diferentes (corte A-A da Figura 3.2 (b)). Pelo modelo de viga proposto, essa
montagem é feita usando dois elementos de viga superpostos ligados na
extremidade pelo mesmo nó, um representando o eixo e o outro o pacote (Figura 3.2
(c)). Em outras palavras, as matrizes elementares do eixo e do pacote laminado são
somadas membro a membro, resultando em uma matriz equivalente que
representará as propriedades da seção transversal na qual está localizado o pacote.
(a)
X
(c)
Eixo
Pacote - E_pct
MAC, IAC
Y
MAC, IAC
(b)
Figura 3.2: Esquema do pacote de chapas representado com elemento de viga em
paralelo (modelo não ramificado)
A matriz elementar para o elemento de eixo continua a mesma com modelo de
viga de Timoshenko que foi apresentada no capítulo anterior. Já para a matriz
elementar do pacote laminado, GARVEY et al. (2004) sugerem que seja modelada
usando um material ortotrópico equivalente. Apesar dessa recomendação, optou-se
por utilizar para o pacote o mesmo tipo de elemento de viga do eixo, também com
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
32
material isotrópico. Neste caso, o efeito do pacote laminado é simulado com a
alteração do módulo de elasticidade E_pct do material dos elementos de viga que o
representam, sendo este o único parâmetro variável no Modelo 02.
3.1.3 Modelo 03: pacote como elemento de viga ramificado
Nesta proposta, o conjunto pacote e eixo é representado por um sistema de
rotor duplo que são conectados nó a nó através de molas com coeficiente de rigidez
equivalente Kc (Figura 3.3(c))6. O pacote laminado continua sendo modelado com o
mesmo elemento de viga utilizado para o eixo, representado como um cilindro
maciço com propriedades isotrópicas do material do eixo. O efeito da laminação é
representado nesse modelo somente com a variação do parâmetro Kc, sendo esse o
único parâmetro do Modelo 03.
X
Eixo
MAC, IAC
Y
MAC, IAC
(a)
Kc
(b)
Pacote Laminado - E_pct
Figura 3.3: Esquema do pacote de chapas e eixo modelados como rotor duplo
O parâmetro KC pode ser comparado diretamente ao que foi obtido por CHEN
et al., (2006), KC = 6x109N/m, para seis molas Neste caso, o autor ainda flexibiliza o
cilindro que constitui o pacote alterando o módulo de elasticidade para E_pct =
15GPa e o módulo de cisalhamento G_pct = 6GPa. Algumas destas alterações são
averiguadas somente no Capítulo 04, pois no presente capítulo utilizam-se as
6
O valor de KC é a soma dos coeficientes das N+1 molas em paralelo que são colocadas para conectar os nós do eixo e pacote
33
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
mesmas propriedades de material para o pacote e eixo, variando-se apenas o valor
de KC.
3.2
Implementação dos Modelos
No presente trabalho, os três modelos descritos anteriormente foram
construídos no programa ANSYS e parametrizados com o auxílio de uma macro
escrita em linguagem APDL do próprio ANSYS. A entrada de dados para o programa
é uma tabela com as seguintes informações: diâmetros externos e internos de cada
seção de eixo, comprimento da seção, módulo de elasticidade do eixo, coeficiente
de Poisson, densidade, massa do pacote, módulo de elasticidade do pacote, massa
e momentos de inércia do anel de curto e distância do CG do anel de curto à chapa
extrema. A Tabela 3-1 ilustra um exemplo de entrada de dados para um rotor.
Tabela 3-1 – Exemplo de dados de entrada para o modelo paramétrico
N°
Escalon.
ØE ØI
L
Ee
[mm] [mm] [mm] [GPa]
ν
Massa
ρ
Pacote
[kg/m³]
[kg]
1
55,0
0,0
110,0
206
0,3 7850,0
2
70,0
0,0
57,5
206
0,3 7850,0
3
81,7
0,0
48,7
206
0,3 7850,0
4
85,2
0,0
103,3
206
0,3 7850,0
5
85,2
0,0
190,0
206
0,3 7850,0
6
85,2
0,0
103,7
206
0,3 7850,0
7
81,7
0,0
48,3
206
0,3 7850,0
8
70,0
0,0
65,0
200
0,3 7850,0
37,6
Epct
[GPa]
206
Massa IP
IT Distância
ØpctE ØpctI
Anel Anel Anel
Anel
[mm] [mm]
[kg] [kg.m²] [kg.m²] [mm]
220,0
85,2
1,6
1,4E-2 7,1E-3
17,4
Com exceção dos testes em que se menciona alteração, os modelos foram
implementados usando as propriedades de material apresentadas na Tabela 3-2. As
densidades do material do pacote de chapas nos casos dos Modelos 02 e 03 são
ajustadas para manter a massa.
34
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
Tabela 3-2 – Propriedades do material do eixo e rotor
PROPRIEDADE
Módulo de Elasticidade
(GPa)
EIXO
PACOTE
206
206
Coeficiente de Poisson
0,3
0,3
Densidade
(kg/m³)
7850
-
Os seguintes elementos foram utilizados:
•
Elemento de viga de Timoshenko com três nós: para representar o eixo e
também para representar o pacote laminado no caso dos Modelos 02 e 03.
•
Elemento de massa: para representar as inércias concentradas dos anéis de
curto e, no caso do Modelo 01, representam também os discos que simulam a
massa e inércia do pacote laminado restante.
•
Elemento de mola unidimensional: para representar uma mola no caso do
elemento de interface do Modelo 03
As figuras Figura 3.4 e Figura 3.6 apresentam exemplos dos modelos
construídos no ANSYS. Para obtenção das freqüências naturais, foi solucionado o
problema de autovalores (EWINS, 1984),
[K ][Θ] = [M ][Θ][λ ]
Eq. 3.11
sendo [K] a matriz de rigidez, [M] a matriz de massa, [λ] uma matriz diagonal com
os autovalores, na qual cada autovalor tem a seguinte relação λi = ±ωi onde ωi é a
2
i-ésima freqüência natural e [Θ
Θ] uma matriz em que cada coluna corresponde ao iésimo autovetor ou modo natural de vibrar associado ao autovalor λi. O método
numérico empregado para solução da equação Eq. 3.11 foi o Block Lanczos
(BATHE, 1996) .
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
Elementos de massa para
a modelagem dos discos
do pacote laminado
Elementos de massa para
a modelagem dos discos
dos anéis de curto
Elementos de viga do eixo
Figura 3.4: Representação do Modelo 01 implementado no ANSYS
Elementos de viga para o
pacote laminado
Elementos de viga do eixo
Elementos de massa para
a modelagem dos discos
dos anéis de curto
Figura 3.5: Representação do Modelo 02 implementado no ANSYS
35
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
36
Elementos de mola
da interface
Elementos de viga para o
pacote laminado
Elementos de massa para
a modelagem dos discos
dos anéis de curto
Elementos de viga do eixo
Figura 3.6: Representação do Modelo 03 implementado no ANSYS
A densidade da malha foi controlada de tal forma que a razão L/D
(comprimento do elemento por diâmetro) de cada elemento do eixo fosse mantida
igual a uma unidade, L/D = 1 (ver ANEXO B para mais detalhes).
3.3
Análise Modal Experimental
3.3.1 Objetivos
Os experimentos realizados neste trabalho têm por objetivo obter os
parâmetros modais (freqüências naturais e modos de vibrar) de uma série de rotores
de gaiola com características construtivas diferentes. Os resultados destes
experimentos são utilizados para avaliar o desempenho dos três modelos de viga
equivalente foram implementados.
3.3.2 Rotores testados
Nenhum protótipo foi desenvolvido especialmente para os testes. Os mesmos
foram realizados utilizando diretamente os rotores de produção da empresa WEG,
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
37
sem o controle da magnitude de interferência entre as chapas e o eixo na região do
pacote. A Tabela 3-3 descreve brevemente algumas características dos rotores que
foram testados. Com estas amostras tentou-se englobar os tipos mais comuns de
rotores de gaiola que são usados em máquinas elétricas.
Tabela 3-3 – Rotores testados
DESIGNAÇÃO
7
DO ROTOR
Massa do rotor
(kg)
225IIP
70,0
250IVP
141,0
355IIP(A)
355,0
355IIP(B)
367,0
355IIP(C)
378,0
315IIP
389,0
400IIP
828,0
450IVP
1224,0
560IIP
1890,0
Descrição
Rotores com barras de alumínio sem canais de ventilação
(pacote contínuo)
Rotor com barras de alumínio e canais axiais de ventilação
(pacote contínuo)
Rotor com barras de cobre e com canais axiais de ventilação
(pacote contínuo)
Rotor com barras de cobre e com canais axiais e radiais de
ventilação (pacotes espaçados)
A Tabela 3-4 apresenta algumas relações geométricas dos rotores que foram
testados. a razão entre comprimento do eixo e do pacote, a razão entre o diâmetro
da chapa do pacote e o diâmetro do eixo na região do pacote, o diâmetro da coroa
da chapa do rotor e o diâmetro do eixo na região do pacote, a altura da coroa da
chapa do rotor e o raio do eixo na região do pacote, a massa total do pacote e a
massa do eixo, o comprimento do pacote de chapas e o diâmetro da chapa do
pacote, o comprimento do pacote de chapas e o diâmetro da coroa da chapa do
rotor. A notação obedece à ordem das colunas da tabela.
7
Os três primeiros números são associados ao tamanho do rotor. Os dois próximos em algarismos romanos são associados ao
número de pólos / rotação do rotor (por exemplo IIP – 3600rpm / IVP – 1800rpm).
38
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
Tabela 3-4 – Relações geométricas dos rotores testados
DESIGNAÇÃO
DO ROTOR
LCH
LEIXO
φCH
φE
φCO
φE
H CO
RE
MT
M EIXO
225IIP
0,24
2,58
1,56
0,56
250IVP
0,37
3,05
2,20
355IIP(A)
0,33
3,18
355IIP(B)
0,33
355IIP(C)
LCH
LCH
φ CH
φ CO
1,32
0,86
2,82
1,20
3,01
1,27
3,78
2,03
1,03
2,97
1,29
3,75
2,87
1,83
0,83
2,52
1,29
3,95
0,33
2,41
1,54
0,54
1,76
1,29
4,39
315IIP
0,31
2,21
1,68
0,68
1,42
0,00
6,17
400IIP
0,28
1,80
1,40
0,40
0,87
1,65
7,44
450IVP
0,31
2,07
1,67
0,67
1,21
1,87
7,25
560IIP
0,31
2,04
1,57
0,57
1,20
2,12
8,33
3.3.3 Descrição dos Experimentos
Todos os rotores foram ensaiados na condição livre-livre. A Figura 3.7 mostra
um exemplo com o rotor 560IIP, de aproximadamente duas toneladas, suspenso por
cintas e talha. A aquisição de dados foi feita com um analisador de sinais de quatro
canais da Brüel & Kjaer, modelo Pulse Data Acquisition 3560C. Para efetuar a
excitação foram usados os martelos instrumentados da ENDEVCO modelo 2203-5
(para os rotores 225IIP e 250IVP) e modelo 8208 (para os demais rotores)8. A
amplitude de vibração foi medida com um acelerômetro tipo TEDS modelo 752A12
também da ENDEVCO. Estes equipamentos são mostrados na Figura 3.8.
8
O tipo do martelo está associado diretamente à massa do rotor que se está testando. Acima de uma determinada massa, foi
necessário usar o martelo 8208 aplicado para grandes estruturas.
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
39
Figura 3.7: Rotor suspenso para ensaio de condição livre-livre
Figura 3.8: Analisador de sinais, martelos de impacto e acelerômetro
Os rotores foram discretizados conforme exemplo apresentado na Figura 3.9
para o rotor 560IIP. A excitação foi feita usando um martelo modal em um ponto no
extremo do eixo, parte dianteira, enquanto o acelerômetro varria os demais pontos
do rotor. Isto garantiu que fossem obtidos os primeiros modos de vibrar da estrutura
seqüencialmente, uma vez que nas extremidades da viga (rotor) nunca haverá um
nó para as condições de contorno testadas. A Figura 3.11 mostra um detalhe da tela
do programa de aquisição de dados utilizado, com uma curva de FRF (função de
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
40
resposta em freqüência) e coerência (PulseLabshop). Já a Figura 3.12 mostra a tela
do programa de análise modal (ME’scopeVES).
Figura 3.9: Coordenadas dos pontos de excitação e resposta (cotas em mm)
Figura 3.10: Exemplo de medição no rotor 250IVP
Em todas as medições utilizou-se 10 médias para compor a FRF com
resolução de 1Hz. Em média, a banda de freqüências utilizada variou de 10Hz a
5kHz. O sinal de força do martelo foi adquirido usando uma janela uniforme,
enquanto que o sinal de resposta do acelerômetro foi adquirido com uma janela
exponencial.
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
Figura 3.11: Tela do programa para aquisição de dados (Pulse Labshop)
Figura 3.12: Tela do programa de análise modal (ME’scopeVES)
41
42
Capítulo 3 Descrição dos Modelos de Viga Equivalente e Experimentos para Validação
3.3.4 Extração dos parâmetros modais
As técnicas para obtenção das curvas de inertância com análise modal
experimental foram baseadas em EWINS (1984).
Para extrair os parâmetros modais foi usado um método de ajuste global no
domínio da freqüência, que utiliza todas as curvas de inertância dos graus de
liberdade (pontos discretos de medição) simultaneamente. Para a estimativa dos
parâmetros (freqüências, modo e amortecimento) do modelo teórico foi usado o
método dos mínimos quadrados (ME’scopeVES, 2003). A Tabela 3-5 apresenta um
sumário com os valores das freqüências naturais obtidas experimentalmente para
cada rotor. Os modos de vibrar são apresentados no ANEXO C. Apesar de obtidos
experimentalmente, os amortecimentos modais são negligenciados, uma vez que
nenhum modelo apresentado no trabalho inclui este efeito.
Tabela 3-5 – Freqüências naturais obtidas experimentalmente para cada rotor
225IIP
MODO 01
(Hz)
688
MODO 02
(Hz)
1203
MODO 03
(Hz)
2597
MODO 04
(Hz)
3039
250IVP
612
928
2169
2794
355IIP(A)
329
579
1290
-
355IIP(B)
395
683
1362
-
355IIP(C)
468
822
1384
-
315IIP
332
493
853
1140
400IIP
288
454
711
-
450IVP
167
302
527
710
560IIP
137
202
429
566
O número de modos obtido para cada rotor ficou determinado pela faixa de
freqüências em que foi possível manter a excitação martelo modal relativamente
constante (desvio menor que 3dB). Por este motivo, para alguns rotores foi possível
obter quatro modos, enquanto para outros se obtiveram somente três.
43
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
4
AVALIAÇÃO DOS MODELOS E DISCUSSÃO DOS RESULTADOS
Neste capítulo são apresentados os resultados que comparam os dados
experimentais àqueles calculados. O principal objetivo deste capítulo é obter
informações que permitam discutir algumas hipóteses sobre o comportamento dos
modelos para cada geometria de rotor que foi testado.
4.1
Curvas de Erro Numérico Experimental de cada Modelo
Para avaliar os modelos de viga propostos, os seus respectivos parâmetros
foram variados dentro de um campo de valores pré-especificado, em seguida foram
calculadas as primeiras freqüências naturais com seus correspondentes modos de
vibrar. Estas freqüências e modos foram comparados com aqueles obtidos
experimentalmente, permitindo determinar os erros nos valores no cálculo das
freqüências naturais, em relação aos valores experimentais, para cada valor de
parâmetro do modelo. Este processo foi realizado para cada um dos rotores e cada
um dos modelos de viga, resultando nas curvas apresentadas nas figuras Figura 4.1
a Figura 4.27. As linhas com marcadores correspondem à variação, em módulo, do
erro percentual de cada freqüência natural, enquanto que a linha sólida representa a
média aritmética dos erros em função do parâmetro de cada modelo.
MODELO 01
687.95
1203.2 Hz
2597.3 Hz
3039.5 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.1: Erro nas freqüências naturais rotor 225IIP – Modelo 01
100%
44
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 01
611.62 Hz
928.25 Hz
2168.7Hz
2794.1 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
20%
30%
40%
50%
60%
70%
80%
90%
100%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.2: Erro nas freqüências naturais rotor 250IVP – Modelo 01
MODELO 01
329 Hz
579 Hz
1290 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
20%
30%
40%
50%
60%
70%
80%
90%
100%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.3: Erro nas freqüências naturais rotor 355 IIP(A) – Modelo 019
MODELO 01
395 Hz
683 Hz
1362 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
20%
30%
40%
50%
60%
70%
80%
90%
100%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.4: Erro nas freqüências naturais rotor 355 IIP(B) – Modelo 01
9
Desconsiderar a legenda que indica freqüência de 0Hz, pois é resultado da geração automática dos gráficos
45
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 01
468 Hz
822 Hz
1384 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
20%
30%
40%
50%
60%
70%
80%
90%
100%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.5: Erro nas freqüências naturais rotor 355 IIP(C) – Modelo 01
MODELO 01
332 Hz
493 Hz
853 Hz
1140 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0%
10%
20%
30%
40%
50%
60%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.6: Erro nas freqüências naturais rotor 315IIP – Modelo 01
MODELO 01
288 Hz
454 Hz
711 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0%
10%
20%
30%
40%
50%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.7: Erro nas freqüências naturais rotor 400IIP – Modelo 01
60%
46
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 01
167 Hz
302 Hz
527 Hz
710 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0%
10%
20%
30%
40%
50%
60%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.8: Erro nas freqüências naturais rotor 450IVP – Modelo 01
MODELO 01
137 Hz
201 Hz
566 Hz
566 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0%
10%
20%
30%
40%
50%
AUMENTO NO DIÂMETRO BASE DO EIXO (%)
Figura 4.9: Erro nas freqüências naturais rotor 560IIP – Modelo 01
60%
47
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 02
687.95
1203.2 Hz
2597.3 Hz
3039.5 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.10: Erro nas freqüências naturais rotor 225IIP – Modelo 02
MODELO 02
611.62 Hz
928.25 Hz
2168.7Hz
2794.1 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.11: Erro nas freqüências naturais rotor 250IVP – Modelo 02
MODELO 02
329 Hz
579 Hz
1290 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.12: Erro nas freqüências naturais rotor 355 IIP(A) – Modelo 02
48
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 02
395 Hz
683 Hz
1362 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.13: Erro nas freqüências naturais rotor 355 IIP(B) – Modelo 02
MODELO 02
468 Hz
822 Hz
1384 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.14: Erro nas freqüências naturais rotor 355 IIP(C) – Modelo 02
MODELO 02
332 Hz
493 Hz
1140 Hz
1140 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.15: Erro nas freqüências naturais rotor 315IIP – Modelo 02
49
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 02
288 Hz
454 Hz
711 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.16: Erro nas freqüências naturais rotor 400IIP – Modelo 02
MODELO 02
167 Hz
302 Hz
527 Hz
710 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.17: Erro nas freqüências naturais rotor 450IVP – Modelo 02
MODELO 02
137 Hz
201 Hz
429 Hz
566 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
1.00E+09
6.00E+09
1.10E+10
1.60E+10
2.10E+10
2.60E+10
MÓDULO DE ELASTICIDADE (N/m²)
Figura 4.18: Erro nas freqüências naturais rotor 560IIP – Modelo 02
50
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 03
687.95
1203.2 Hz
2597.3 Hz
3039.5 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
2.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.19: Erro nas freqüências naturais rotor 225IIP – Modelo 03
MODELO 03
611.62 Hz
928.25 Hz
2168.7Hz
2794.1 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
2.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.20: Erro nas freqüências naturais rotor 250IVP – Modelo 03
MODELO 03
329 Hz
579 Hz
1290 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
2.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.21: Erro nas freqüências naturais rotor 355 IIP(A) – Modelo 03
51
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 03
395 Hz
683 Hz
1362 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
2.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.22: Erro nas freqüências naturais rotor 355 IIP(B) – Modelo 03
MODELO 03
468 Hz
822 Hz
1384 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
2.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.23: Erro nas freqüências naturais rotor 355IIP(C) – Modelo 03
MODELO 03
332 Hz
493 Hz
853 Hz
1140Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.24: Erro nas freqüências naturais rotor 315IIP – Modelo 03
2.00E+11
52
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
MODELO 03
288 Hz
454 Hz
711 Hz
0
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
2.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.25: Erro nas freqüências naturais rotor 400IIP – Modelo 03
MODELO 03
167 Hz
302 Hz
527 Hz
710 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
1.00E+10
2.00E+10
3.00E+10
4.00E+10
5.00E+10
6.00E+10
7.00E+10
8.00E+10
9.00E+10
1.00E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.26: Erro nas freqüências naturais rotor 450IVP – Modelo 03
MODELO 03
137 Hz
201 Hz
429 Hz
566 Hz
MEDIO
25%
20%
ERRO
15%
10%
5%
0%
0.00E+00
2.00E+10
4.00E+10
6.00E+10
8.00E+10
1.00E+11
1.20E+11
1.40E+11
1.60E+11
1.80E+11
RIGIDEZ TOTAL DAS MOLAS DE INTERFACE (N/m)
Figura 4.27: Erro nas freqüências naturais rotor 560IIP – Modelo 03
2.00E+11
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
4.2
53
Avaliação da Precisão dos Modelos
Em todas as curvas é possível observar que existem pontos de mínimo que
ajustam exatamente o valor da freqüência natural de cada modo do rotor. Isto indica
que o efeito de enrijecimento varia modo a modo quando representado com os
modelos de vigas equivalentes aqui apresentados. Se o modelo fosse ideal, com um
único valor de parâmetro físico seria possível reproduzir todas suas características
dinâmicas. Então, para avaliar o quão próximo do ideal estão os modelos de viga
equivalente propostos, propõe-se utilizar aqui a seguinte análise:
Quanto menos dispersos estiverem os valores dos parâmetros que minimizam
o erro de cada modo, mais próximo do ideal ou mais preciso será o modelo numérico
para um determinado rotor
Baseado nos gráficos obtidos acima é possível observar que este
comportamento pode ser avaliado usando uma só grandeza: o valor do erro médio
das primeiras freqüências naturais, correspondentes às linhas sólidas nas Figuras de
Figura 4.1 a Figura 4.27. Portanto, o modelo considerado o mais preciso para este
dado rotor será aquele que apresentar o menor valor de erro médio “mínimo” (que a
partir deste ponto será chamado somente de erro mínimo).
A Tabela 4-1 apresenta um sumário com os valores do erro mínimo obtido em
cada modelo, bem como a quantidade de modos que foi considerado para cada
rotor. Os modos de vibrar para a condição de erro mínimo que serviram de base
para obter as curvas de erro são apresentados separadamente nas figuras do
ANEXO C. Como observado na Tabela 4-1, o Modelo 03 se destaca como o mais
preciso para a maioria dos rotores testados (6 entre 9). Já os Modelos 01 e 02
podem ser considerados como equivalentes em termos da sua precisão. Essa
conclusão já foi reportada em GARVEY et al. (2004) que afirma que o modelo
ramificado é bastante adequado para representar rotores com núcleo laminado.
54
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
Tabela 4-1 – Erro mínimo obtido com cada modelo de viga equivalente
ROTOR
ERRO MÍNIMO NO CÁLCULO DAS FREQÜÊNCIAS
NATURAIS DOS MODOS VIBRAR DO ROTOR
Nº de modos
considerados
MODELO 01
MODELO 02
MODELO 03
225IIP
6,4%
5,8%
2,1%
04
250IVP
12,5%
10,2%
6,0%
04
355IIP(A)
9,2%
8,5%
1,9%
03
355IIP(B)
6,8%
6,1%
1,8%
03
355IIP(C)
2,7%
2,6%
1,2%
03
315IIP
3,1%
2,3%
3,7%
04
400IIP
1,9%
1,7%
0,3%
03
450IVP
3,0%
2,1%
4,4%
04
560IIP
3,6%
3,2%
4,0%
04
Como a intenção é saber se um mesmo modelo de viga poderá ser usado para
representar diversas geometrias de rotor sem a necessidade de identificar os
parâmetros de cada caso experimentalmente, a informação de precisão fica
incompleta (ver Figuras de Figura 4.1 a Figura 4.27). Então, o modelo deveria
também
ser
robusto
suficiente
para
não
alterar
significativamente
suas
características conforme se altera seus parâmetros de entrada. O tópico a seguir
descreve o segundo critério utilizado neste trabalho para avaliar o modelo de viga
equivalente.
4.3
Avaliação da Robustez dos Modelos
A idéia de modelo robusto para este trabalho é: usando um único parâmetro
para o modelo de viga equivalente, ele ainda é capaz de calcular as freqüências
naturais de todos os rotores com precisão?
A Tabela 4-2 apresenta o valor do parâmetro de cada modelo para o
correspondente erro mínimo da Tabela 4-1. A média entre os parâmetros mínimos
obtidos para cada rotor é utilizada como valor fixo para recalcular as freqüências
55
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
naturais. Os valores, agora do erro médio, das primeiras freqüências naturais de
cada rotor, são apresentados na Tabela 4-3.
Tabela 4-2 – Parâmetro de cada modelo no erro mínimo
ROTOR
PARÂMETRO DE CADA MODELO NA CONDIÇÃO DE
ERRO MÍNIMO
MODELO 01
MODELO 02
MODELO 03
pt (%)
E_pct(GPa)
Kc(N/m)
10
225IIP
23,9%
5,1
7,6x10
250IVP
55,2%
14
9,9 x10
355IIP(A)
42,4%
6,2
5,6 x10
10
355IIP(B)
45,6%
9,7
1,7 x10
11
355IIP(C)
29,6%
10
4,9 x1010
315IIP
30,0%
17
3,3 x10
10
400IIP
15,6%
16
1,8 x10
10
450IVP
10,0%
6,2
1,1 x10
10
560IIP
28,8%
21
4,1 x10
10
MÉDIO
31,2%
12
5,1 x10
09
10
Tabela 4-3 – Erro médio com parâmetro fixo para avaliar a robustez do modelo
ROTOR
ERRO MÉDIO DA FREQÜÊNCIA NATURAL DOS N
PRIMEIROS MODOS COM PARÂMETRO FIXO
MODELO 01
MODELO 02
MODELO 03
225IIP
7,4%
9,3%
2,4%
250IVP
20,1%
11,5%
9,7%
355IIP(A)
15,4%
10,6%
2,1%
355IIP(B)
13,5%
6,7%
2,8%
355IIP(C)
3,2%
3,3%
1,3%
315IIP
3,3%
4,5%
4,0%
400IIP
6,7%
2,5%
3,4%
450IVP
16,1%
5,8%
13,3%
560IIP
3,8%
5,7%
4,2%
56
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
Verifica-se que o Modelo 03 mantém um valor inferior a 5% de erro médio
usando um mesmo parâmetro para quase todos os rotores (sete entre nove). As
exceções foram os rotores 250IVP e 450IVP.
4.4
Correlação dos Resultados com a Geometria do Rotor
A Figura 4.28 apresenta o comportamento do erro mínimo em função da
relação entre a altura da coroa da chapa do pacote e o raio do eixo (ver Figura 1.5
para notação) para o Modelo 01. De forma geral, é possível observar que, quanto
maior a altura da coroa do pacote em relação ao raio do eixo, maior será sua
influência sob a rigidez total do sistema, e maior será o erro do modelo simplificado.
14%
Hcoroa / Reixo
12%
ERRO MÍNIMO
10%
8%
6.36%
6%
4%
3.61%
2%
0%
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Hcoroa / Reixo
Figura 4.28: Relação entre HCO/RE e o erro mínimo para o Modelo 01
Poder-se-ia até sugerir alguma curva de tendência para a correlação entre as
variáveis do gráfico na Figura 4.28. Contudo, o erro mínimo sofreu uma variação de
3,6% para 6,4% para um mesmo valor de razão HCO/RE, que indica a necessidade
de considerar uma segunda variável no modelo para justificar este desvio
57
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
Dessa forma, uma segunda relação de geometria e erro foi analisada conforme
apresenta a Figura 4.29. Neste caso o erro mínimo foi avaliado em função da razão
entre o comprimento do pacote de chapas e o comprimento do eixo.
14%
Lpacote / Leixo
ERRO MÍNIMO
12%
10%
8%
6.36%
6%
4%
3.61%
2%
0%
0.2
0.25
0.3
0.35
0.4
Lpacote / Leixo
Figura 4.29: Relação entre LCH/Leixo e o erro mínimo para o Modelo 01
Observa-se que o maior desvio de uma tendência que foi mostrada no gráfico
da Figura 4.28 aconteceu no rotor que possui o pacote mais curto em relação ao
eixo dentre todos os outros, o rotor 225IIP. A variação do erro em função da relação
entre a massa do pacote e a massa do eixo é apresentada na Figura 4.30,
mostrando o mesmo comportamento.
58
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
14%
Mpacote / Meixo
ERRO MÍNIMO
12%
10%
8%
6.36%
6%
4%
3.61%
2%
0%
0.4
0.9
1.4
1.9
2.4
2.9
3.4
Μ pacote/Μ
/Μ eixo
Figura 4.30: Relação entre MT/Meixo e o erro mínimo para o Modelo 01
O Modelo 02 apresenta o mesmo comportamento do Modelo 01. Isto sugere
que os dois são equivalentes, sendo que a concepção do Modelo 02 é mais versátil
e permite implementar modelos com propriedades elásticas diferentes para o pacote
em relação ao eixo.
O Modelo 03 não exibe uma relação clara entre o erro mínimo e a relação entre
a altura da coroa da chapa do pacote e o raio do eixo, como apresentado na Figura
4.31. O que se pode afirmar é que, assim como nos outros modelos, o maior erro
deste modelo correspondeu ao rotor com a maior razão entre a altura da coroa e
diâmetro do eixo, o 250IVP.
59
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
7%
Hcoroa / Reixo
1.20
6.0%
6%
ERRO MÍNIMO
5%
4%
3%
2%
1%
0%
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Hcoroa / Reixo
Figura 4.31: Relação entre a geometria do rotor e o erro mínimo para o Modelo 03
4.5
Efeito do Cisalhamento no Elemento de Pacote
A última coluna da Tabela 3-4 apresenta a relação entre o comprimento do
pacote e o diâmetro da coroa dos rotores, LCH φ CO . Implica que, pela teoria de viga,
todos os pacotes laminados, se avaliados isoladamente, poderiam ser considerados
como viga curta caso fossem de material maciço (ALDRAIHEN et al., 1996). Este
fato indicaria o quão relevante seria a deformação de cisalhamento neste elemento.
Completando esta informação, foram tomadas as dimensões de diâmetro (φCH) e
comprimento do pacote de chapas (LCH) para calcular um fator de correção à
deformação de cisalhamento, como definido pela equação Eq. 2.15, para todos os
núcleos laminados.
Os resultados de Φ são apresentados na Tabela 4-4 supondo Epct = Eeixo, νpct = νeixo
e Gpct = Geixo.
60
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
Tabela 4-4 – Fator de correção para o cisalhamento transversal, considerando as
dimensões totais, nos cilindros laminados do núcleo dos rotores testados
ROTOR
225IIP
250IVP
Φ
1,35
0,76
355IIP(A) 355IIP(B) 355IIP(C)
0,60
0,62
0,68
315IIP
400IIP
450IVP
560IIP
0,54
0,65
0,49
0,36
Da análise da Tabela 4-4, considerando o valor de Φ, pode-se afirmar que a
influência do cisalhamento na deformação do pacote do rotor 225IIP é a maior
dentre todos os rotores testados. Esta diferença que poderia justificar os desvios nas
curvas de tendência discutidas no item anterior para o Modelo 01 e Modelo 02
(Figura 4.28, Figura 4.29 e Figura 4.30) .
Para avaliar a importância do cisalhamento no pacote, o Modelo 02 foi
reformulado alterando o elemento de viga do núcleo laminado de viga de
Timoshenko para um elemento de viga de Euler-Bernoulli com correção para o
cisalhamento (Seção 2.2.2). Com esta configuração é possível ativar ou desativar a
parcela que considera o cisalhamento, sendo o modelo novamente calculado
usando todo o processo de erro mínimo que foi apresentado anteriormente. A
Tabela 4-5 apresenta os resultados do erro mínimo obtido. Na última coluna é
apresentada a relação LCH φ CO do rotor.
Tabela 4-5 – Erro mínimo alterando cisalhamento no elemento de pacote para
Modelo 02
ROTOR
LCH
MODELO 02
TIMO
EB_C
EB_S
φ CO
225IIP
5,8%
7,04%
7,03%
1,43
250IVP
10,2%
9,67%
8,53%
1,76
355IIP(A)
8,5%
8,26%
8,12%
2,02
355IIP(B)
6,1%
5,74%
5,62%
2,02
355IIP(C)
2,6%
2,26%
2,10%
2,02
315IIP
2,3%
2,56%
3,09%
2,22
400IIP
1,7%
1,60%
1,62%
2,13
450IVP
2,1%
2,74%
2,92%
2,33
560IIP
3,2%
3,24%
3,53%
2,77
TIMO – Timoshenko com três nós
EB_C – Euller Bernoulli com cisalhamento
EB_S – Euller Bernoulli sem cisalhamento (Φ = 0)
61
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
As diferenças foram muito pequenas, sugerindo que somente a teoria
tradicional que é usada para considerar o cisalhamento em vigas, não é suficiente
para melhorar a representação de alguns pacotes com modelo de viga equivalente
usando modelos não ramificados (Modelo 02).
4.6
Discussão sobre o Comportamento do Modelo 03
Conforme as discussões prévias e da literatura, pode-se observar que a real
interação entre o núcleo laminado e o eixo de um rotor depende, simultaneamente,
de muitos fatores geométricos e construtivos do rotor. Conseqüentemente, estas
características do rotor irão definir quais os tipos de deformações que estão atuando
e quais são mais relevantes no momento de caracterizar o efeito de enrijecimento do
pacote sobre o eixo.
Dentre os modelos testados, a configuração do Modelo 03 é a que mais se
assemelharia à uma viga com anisotropia, pois é possível controlar separadamente
uma rigidez à flexão (elemento de viga) e também ao cisalhamento (elemento de
mola).
Para examinar as hipóteses referentes à importância do cisalhamento no
pacote, como feito anteriormente, o Modelo 03 foi reformulado alterando o elemento
de viga do núcleo laminado de viga de Timoshenko para um elemento de viga de
Euler-Bernoulli com correção para o cisalhamento. Os resultados, apresentados na
Tabela 4-6, sugerem novamente que somente a formulação tradicional para inclusão
do cisalhamento não tem grande efeito no modelo de viga equivalente.
Tabela 4-6 – Erro mínimo alterando cisalhamento no elemento de pacote para
Modelo 03
TIMO
EB_C
EB_S
LCH
H CO
225IIP
2,1%
2,11%
2,15%
1,35
250IVP
6,0%
5,96%
6,07%
0,76
355IIP(A)
1,9%
1,92%
2,00%
0,60
ROTOR
MODELO 03
62
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
355IIP(B)
1,8%
1,75%
1,75%
0,62
355IIP(C)
1,2%
1,21%
1,24%
0,68
315IIP
3,7%
3,65%
3,97%
0,54
400IIP
0,3%
0,31%
0,32%
0,65
450IVP
4,4%
4,37%
4,52%
0,49
560IIP
4,0%
3,95%
4,27%
0,36
TIMO – Timoshenko com três nós
EB_C – Euller Bernoulli com cisalhamento
EB_S – Euller Bernoulli sem cisalhamento (Φ = 0)
Finalmente, foi realizado um estudo de sensibilidade do Modelo 03 à variação
do módulo de elasticidade usado para o elemento de pacote. Os resultados de erro
mínimo são apresentados na Tabela 4-7.
Tabela 4-7 – Erro mínimo alterando o módulo de elasticidade no elemento de
pacote - Modelo 03
ROTOR
Módulo de Elasticidade do pacote (N/m²)
9
10
11
11
11
1,0x10
1,0x10
1,0x10
2,0x10
3,0x10
225IIP
55,9%
23,0%
2,0%
2,1%
2,1%
250IVP
62,2%
24,6%
6,0%
6,0%
6,6%
355IIP(A)
52,0%
18,7%
1,7%
1,9%
1,9%
355IIP(B)
55,9%
22,3%
1,6%
1,8%
2,1%
355IIP(C)
60,1%
21,1%
1,1%
1,2%
1,2%
315IIP
52,7%
18,5%
3,1%
3,7%
4,0%
400IIP
49,6%
10,8%
0,1%
0,3%
0,3%
450IVP
46,5%
10,5%
3,9%
4,4%
4,4%
560IIP
49,6%
20,4%
3,1%
4,0%
4,4%
Observa-se que a diminuição do módulo de elasticidade do pacote aumenta
significativamente o erro mínimo. Por outro lado, o erro tende para um valor mínimo
quando este módulo está próximo ao valor do material que constitui as chapas do
pacote, nestes casos o aço. GARVEY (1989) reporta este mesmo comportamento
observado. Ele afirma que, para as deformações que ocorrem no plano normal ao da
Capítulo 4 Avaliação dos Modelos e Discussão dos Resultados
63
laminação, pode-se esperar uma rigidez do pacote equivalente àquela de um
material sólido. Por outro lado, no sentido paralelo ao da laminação, a rigidez é muito
menor se comparada com a de um material maciço, sendo função da pressão de
empacotamento usada para formar o pacote de chapas. Está última afirmação pode
justificar porque os valores de Kc na condição de erro mínimo são diferentes para os
diferentes rotores (Tabela 4-2).
Capítulo 5 Conclusões e Sugestões de Trabalhos Futuros
64
5 CONCLUSÕES E SUGESTÕES DE TRABALHOS FUTUROS
5.1
Conclusões
O propósito deste trabalho foi realizar um estudo numérico-experimental para
avaliar modelos de viga equivalente para representar o comportamento dinâmico de
rotores de gaiola de máquinas elétricas rotativas.
A bibliografia revisada forneceu os três modelos que serviram de base para o
desenvolvimento deste trabalho. Foram implementadas e testadas três versões de
modelos de viga: (i) utilização de um diâmetro equivalente na região do pacote
laminado, denominado de Modelo 01, (ii) emprego de um elemento finito para
representar o pacote, o qual é unido diretamente ao elemento que representa o eixo,
chamado de Modelo 02 e (iii) utilização de um elemento finito para representar o
pacote, unido através de molas ao elemento que representa o eixo, sendo este
denominado de Modelo 03.
Os modelos foram concebidos visando a simplicidade de construção e
avaliação. Para tal, somente um parâmetro para cada modelo foi colocado como
variável. Os parâmetros restantes são obtidos com informações de geometria e
propriedades do material dos elementos que compõem o rotor. Nove rotores de
gaiola foram escolhidos para análise experimental, sendo seis com gaiola de
alumínio injetado e três com gaiola de barras de cobre. Uma análise modal
experimental foi realizada em cada um dos rotores para uma condição livre de
apoios, obtendo-se os primeiros modos naturais de vibrar e suas freqüências
naturais correspondentes. Esses resultados foram utilizados para avaliação dos
modelos.
Os modelos anteriormente definidos foram implementados em elementos
finitos usando como padrão: elementos de viga de Timoshenko com três nós para
representar o eixo e também para representar o pacote laminado no caso dos
Modelos 02 e 03; elementos de massa para representar as inércias concentradas;
elementos de mola unidimensional como elemento de ligação entre o pacote e eixo
no caso do Modelo 03. Foi realizada uma seqüência de análises modais numéricas
Capítulo 5 Conclusões e Sugestões de Trabalhos Futuros
65
dos rotores na condição livre de apoios, variando o valor do parâmetro de cada
modelo: diâmetro equivalente para o Modelo 01; módulo de elasticidade do elemento
do pacote no Modelo 02; e rigidez total das molas de interface no caso do Modelo
03. As freqüências calculadas foram comparadas, modo a modo, com aquelas
obtidas experimentalmente, obtendo-se várias curvas com os erros de cada modo
para um dado rotor.
Foram apresentadas duas formas de avaliação para os modelos propostos. A
primeira, considerando uma curva com a média dos erros de todos os modos foi
traçada em função do parâmetro variável de cada modelo. O valor mínimo desta
curva foi usado para definir a precisão do modelo de viga em questão para cada um
dos rotores testados. O modelo 03, na média, se mostrou o mais preciso deles para
reproduzir as freqüências naturais dos nove rotores testados.
O segundo critério de avaliação foi baseado na necessidade de se utilizar um
único valor de parâmetro para representar todos os rotores testados. Este critério foi
denominado de robustez do modelo. No critério anterior, cada rotor obteve um valor
diferente de parâmetro para a condição de erro mínimo. A média destes parâmetros
entre todos os rotores foi utilizada como novo parâmetro de avaliação, agora fixo,
para recalcular o erro médio, das primeiras freqüências naturais de um determinado
rotor. O Modelo 03 se destacou como o mais robusto na maioria dos casos, mas
também apresentou erro relativamente elevado na representação de dois rotores
analisados. À exceção destes dois desvios, o Modelo 03 permitiu obter um erro
médio inferior a 5% usando um único valor de parâmetro.
A correlação dos resultados com a geometria do rotor permitiu sugerir algumas
hipóteses para o comportamento dos rotores com núcleo laminado. Foi possível
inferir que a consideração de um modelo anisotrópico pode ainda melhorar a
representação do efeito de enrijecimento do pacote sobre o eixo do rotor.
Como ficou demonstrado pela investigação numérica experimental realizada o
Modelo 03 se mostrou o mais adequado para representar os rotores de gaiola de
máquinas elétricas. Usando uma rigidez total das molas de interface de 5,1x1010N/m
e um módulo de elasticidade de 206GPa para o elemento do pacote, um modelo de
viga de Timoshenko com três nós para o eixo e pacote e uma malha com razão
entre comprimento do elemento e diâmetro L/D = 1, é possível obter um erro inferior
Capítulo 5 Conclusões e Sugestões de Trabalhos Futuros
66
a 5% nos três primeiros modos de viga livre-livre. O erro aumenta para próximo de
10% para aqueles rotores com a altura de coroa próxima do diâmetro do eixo base.
Todos estes resultados indicam que é possível usar o Modelo 03 como um modelo
de viga equivalente para representar, pelo menos, os tipos rotores com pacote
laminado que foram descritos neste trabalho.
5.2
Sugestões para trabalhos futuros
Como foram utilizados rotores de produção, sugere-se um estudo com
protótipos físicos que possibilitem controlar e variar parâmetros tais como,
interferência de montagem do pacote, pressão de empacotamento, bem como
utilizar diferentes relações geométricas. Esta abordagem também poderia auxiliar
em um melhor tratamento estatístico do problema em questão, podendo-se incluir
cálculos de desvio padrão, ajustes por mínimos quadrados entre outros.
Os rotores foram avaliados somente na condição livre-livre sem rotação para
diminuir o número de variáveis. Para uma avaliação mais rigorosa, o desempenho
do modelo deveria ser testado em uma identificação numérico-experimental de um
sistema completo, obtendo os valores de rotação crítica, órbitas e modos de vibrar
quando a máquina está em operação.
O grupo de pesquisa do LAVIB (Laboratório de Vibrações) da UTFPR possui
um software para análise de dinâmica de rotores que foi desenvolvido especialmente
para máquinas elétricas, o RotorDin. Como prosseguimento da presente pesquisa,
propõe-se que os três modelos sejam implementados neste software.
Sugere-se também que o comportamento dos rotores seja analisado usando
um modelo tridimensional de elementos finitos. Com isto também é possível incluir
os efeitos de anisotropia do material, bem como outros efeitos tais como a
interferência entre o eixo e o pacote. Entretanto, sabe-se que é computacionalmente
oneroso realizar análises dinâmicas completas em modelos com elementos finitos
sólidos.
Capítulo 5 Conclusões e Sugestões de Trabalhos Futuros
67
O amortecimento interno do pacote de chapas e os erros da análise modal
experimental que não foram discutidos neste trabalho poderiam ser investigados em
pesquisas futuras. O mesmo se aplica à rigidez de montagem do pacote sobre o eixo
devido à interferência, que poderia ser estudada e até correlacionada ao valor de Kc
do Modelo 03.
Por último, a experiência obtida com este trabalho poderia ser utilizada para
implementar um elemento finito de viga que possua outras formas de incluir o efeito
da anisotropia do material. Alguns textos como LIM e HAN (2001) propõem modelos
de viga que podem ser aproveitados para um desenvolvimento posterior a este
trabalho. SUBRAMANIAN (2005) também sugere modelos a serem empregados em
vigas laminadas de material composto. Acredita-se que a união do conhecimento
obtido até então, com as pesquisas na área de dinâmica de materiais compostos
possa ser utilizada para obter um modelo que represente ainda mais precisamente o
comportamento dinâmico de rotores com núcleo laminado.
68
Referências
REFERÊNCIAS
ALVES FILHO, A.. Elementos Finitos. 1. ed. São Paulo: Editora Érica Ldta, 2000.
ALDRAIHEM, O. J., WETHERHOLD, R. C., SINGH, T. Intelligent beam structures:
Timoshenko theory vs. Euler-Bernoulli theory. In: IEEE International Conference on
Control Applications, Dearborn, MI, p. 976-981, 1996.
ANSYS – Release 11.0 Documentation for Ansys. Copyright SAS IP Inc, 2007
API 541 - AMERICAN PETROLEUM INSTITUTE. ANSI/API Standard 541: Formwound squirrel-cage induction motors – 500 horsepower and larger.
Washington, D.C., 2004.
API 684 - AMERICAN PETROLEUM INSTITUTE. API Recommended Practice 684:
Rotordynamics tutorial - lateral critical speeds, unbalance response, stability,
train torsionals, and rotor balancing. Washington, D.C., 2005.
BATHE, K. J.. Finite Element Procedures. 1. ed. New Jersey: Prentice Hall, 1996.
BAZOUNE, A., KHULIEF, Y. A.. Shape functions of three-dimensional Timoshenko
beam element. Journal of Sound and Vibration, v. 259, n. 2, p. 473-480, 2003.
CARVALHO, A. P., BAVASTRI, C. A., PEREIRA, J. T., LUERSEN, M. A., SANTOS,
H. L. V.. Análise de dinâmica de rotores utilizando elementos finitos de viga de
Timoshenko de classe C0. In: CIBIM8 – 8o Congresso Ibero Americano de
Engenharia Mecânica, Cusco, Peru, 2007.
CHEN, Y. S., CHENG, Y. D., LIAO, J. J., CHIOU, C. C.. Development of a finite
element solution module for the analysis of the dynamic behavior and balancing
effects of an induction motor system. Finite Elements in Analysis and Design,
v.44, p. 483-492, 2008.
COOK, R. D., MALKUS, D. S., PLESHA, M. E., WITT, R. J.. Concepts and
Applications of Finite Element Analysis. 4th. ed. USA: John Wiley & Sons Ltd.,
2002.
Referências
69
EDE, J. D., ZHU, Z. Q., HOWE, D.. Rotor resonances of high-speed permanentmagnet brushless machines. IEEE Tansactions on Industry Applications, v. 38, n.
6, p1542-1548, 2002.
EHRICH, F.F.. Handbook of Rotordynamics. 3. ed. Florida: Krieger Publishing
Company, 2004.
EWINS, D. J.. Modal Testing: Theory and Practice. 1. ed. Great Britain: Research
Studies Press Ltd., 1984.
GARVEY, S.D.. The vibrational behavior of laminated components in electrical
machines. In: ICEM4 - International Conference on Electrical Machines p. 226231, 1989.
GARVEY, S.D., PENNY, J. E. T., FRISWELL, M. I., LEES, A. W.. The Stiffening
Effect of Laminated Rotor Cores on Flexible-Rotor Electrical Machines. In: IMECHE International Conference on Vibrations in Rotating Machinery, Swansea, UK, p.
193-202, 2004.
GENTA, G.. Dynamics of Rotating Systems. 1. ed. USA: Springer, 2005.
GMÜR, T. C., RODRIGUES, J.D.. Shaft Finite Elements for Rotor Dynamics
Analysis. Journal of Vibration and Acoustics – Transactions of the ASME, v.
113, p. 482-493, 1991.
HUGHES, T. J. R.. The Finite Element Method. 2. ed. USA: General Publishing
Company Ltd., 2000.
HUTTON, D. V.. Fundamentals of Finite Element Analysis. 1. ed. USA: McGrawHill Companies Inc., 2004.
KIM, Y. C., KIM, K. W.. Influence of lamination pressure upon the stiffness of
laminated rotor. JSME International Journal, v. 49, n. 2, p. 426-431, 2006.
KOSTENKO, M., PIOTROVSKI, L.. Máquinas Elétricas. vol. 2. Porto: Editora Lopes
da Silva, 1979.
LALANNE, M., FERRARIS, G.. Rotordynamics Prediction in Engineering. 1. ed.
England: John Wiley & Sons Ltd., 1990.
Referências
70
LIM, J. K., HAN, S. Y.. A high order deformation theory of orthotropic beams. JSME
International Journal, v. 44, n. 3, p. 370-373, 2001.
ME’scopeVES Version 4.0.0.6. Operating Manual: Volume II – Reference. Vibrant
Technology, Inc, 2003.
NELSON, F. C. A brief history of early rotor dynamics. Sound and Vibration, v. 37,
n.6, p. 1-11, 2003.
NELSON, H. D.. A finite rotating shaft element using Timoshenko beam theory.
Journal of Mechanical Design - Transactions of the ASME, v. 102, p. 793-802,
1980.
NETO, R. R., BOGH, D. L., FLAMMIA, M.. Some experiences on rigid and flexible
rotors in induction motors driving equipment in petroleum and chemical plants. In:
PCIC53 - Petroleum and Chemical Industries Committees, Philadelphia, USA,
2006,.
SANTOS, H. L. V.. Validação experimental de rotina para cálculo de freqüências
naturais de rotores. Jaraguá do Sul: WEG Equipamentos Elétricos S.A., 2007.
Relatório Técnico.
SANTOS, H. L. V.. Lateral critical speeds analysis – RTEC0035/2008. Jaraguá do
Sul: WEG Equipamentos Elétricos S.A., 2008. Relatório Técnico.
SUBRAMANIAN, P.. Dynamic analysis of laminated composite beams using high
order theories and finite elements. Journal of Composite Structures, v. 73, p. 342353, 2005.
TADEO, A. T.. Modelagem dos Acoplamentos Mecânicos nos Sistemas
Horizontais: Rotor, Acoplamento, Mancal. Campinas, 2003. 250 f. Tese
(Doutorado em Engenharia Mecânica – Área de Mecânica dos Sólidos e Projeto
Mecânico) – UNICAMP – Universidade Estadual de Capinas.
WILD, T. Electrical Machines: Drives and Power Systems. 5. ed. New York:
Prentice Hall, 2002.
71
Anexo A Teste de Malha
ANEXO A – TESTE DE MALHA
A1 - SENSIBILIDADE À MUDANÇA DA MALHA
A sensibilidade à mudança da malha foi avaliada usando o tamanho do
elemento como parâmetro. Para controlar o comprimento do elemento de viga do
eixo, foi utilizado um parâmetro automático que relaciona a razão entre o
comprimento e o diâmetro do i-ésimo do elemento de eixo, denotado por
Li Di (Figura A-1).
Li
L1
D1
Di
Figura A.1: Definição do parâmetro Li Di utilizado para a variação da malha
Este tipo de controle permite manter uma maior uniformidade nos termos da
matriz de
rigidez
global,
pois
em
escalonamentos
com diâmetro
maior,
automaticamente o comprimento do elemento também será maior. A segunda
vantagem desta forma de controle é ser adimensional, permitindo comparar
diferentes configurações de rotores. As tabelas A-1, A-2 e A-3 apresentam o
comportamento dos erros médios mínimos em função do tamanho da malha para os
modelos de diâmetro equivalente, não ramificado e ramificado respectivamente.
Nesta primeira avaliação, foi usado o modelo de viga de Timoshenko tanto para o
eixo quanto para o núcleo laminado.
72
Anexo A Teste de Malha
Tabela A.1 – Efeito do tamanho da malha no erro mínimo para o Modelo 01
ROTOR
L/D
2,0
1,5
1,0
0,7
0,5
0,1
225IIP
6,5%
6,4%
6,4%
6,3%
6,2%
6,2%
250IVP
14,3%
13,4%
12,5%
11,4%
11,1%
11,9%
355A
9,1%
9,1%
9,2%
8,9%
8,7%
8,2%
355B
7,7%
7,2%
6,8%
6,4%
6,1%
5,9%
355C
4,0%
2,6%
2,7%
2,7%
2,5%
2,4%
315IIP
4,5%
3,4%
3,1%
3,0%
2,9%
2,8%
400IIP
2,6%
2,6%
1,9%
1,8%
1,8%
1,7%
450IVP
4,4%
3,2%
3,0%
2,8%
2,8%
2,0%
560IIP
4,0%
4,0%
3,6%
3,5%
3,4%
3,3%
Tabela A.2 – Efeito do tamanho da malha no erro mínimo para o Modelo 02
ROTOR
L/D
2,0
1,5
1,0
0,7
0,5
0,1
225IIP
5,3%
5,4%
5,8%
5,9%
6,0%
6,4%
250IVP
10,1%
10,3%
10,2%
10,1%
10,1%
10,0%
355A
8,6%
8,6%
8,5%
8,5%
8,4%
8,4%
355B
5,8%
6,2%
6,1%
6,0%
5,9%
5,9%
355C
3,5%
2,8%
2,6%
2,5%
2,5%
2,4%
315IIP
1,8%
2,0%
2,3%
2,4%
2,5%
2,5%
400IIP
1,7%
1,7%
1,7%
1,7%
1,6%
1,6%
450IVP
4,4%
2,8%
2,1%
2,2%
2,4%
2,6%
560IIP
3,0%
3,0%
3,2%
3,2%
3,2%
3,2%
73
Anexo A Teste de Malha
Tabela A.3 – Efeito do tamanho da malha no erro mínimo para o Modelo 03
ROTOR
L/D
2,0
1,5
1,0
0,7
0,5
0,1
225IIP
2,6%
2,6%
2,1%
2,1%
2,1%
2,3%
250IVP
6,5%
6,4%
6,0%
6,7%
6,6%
7,4%
355A
2,5%
2,2%
1,9%
1,9%
1,9%
1,9%
355B
3,8%
2,1%
1,8%
1,6%
1,6%
2,8%
355C
1,8%
1,3%
1,2%
1,2%
1,1%
1,2%
315IIP
3,9%
3,6%
3,7%
3,8%
3,8%
4,0%
400IIP
0,4%
0,4%
0,3%
0,2%
0,1%
0,1%
450IVP
4,5%
4,5%
4,4%
4,3%
4,3%
4,3%
560IIP
4,0%
4,0%
4,0%
4,1%
4,1%
4,3%
Esta análise mostrou que os modelos são pouco sensíveis ao tamanho da
malha quando são utilizadas as configurações definidas no capítulo anterior. Por
isto, optou-se por utilizar a relação L/D = 1 como padrão para todas as análises
deste trabalho.
74
Anexo B Comparação dos Modos de Vibrar
ANEXO B – COMPARAÇÃO DOS MODOS DE VIBRAR
Experimental
Calculado – na condição de erro mínimo
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
-0.3
Modelo
01
MODO 01 - 686.2Hz
0.7
-0.5
MODO 01 - 689.5Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
02
MODO #1
-0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
03
MODO 01 - 670.2Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.6
0.7
0.8
0.9
-0.3
Modelo
01
MODO 02 - 1281.2Hz
0.7
-0.5
MODO 02 - 1292.3Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
02
MODO #2
-0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
03
MODO 02 - 1156.0Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
01
MODO 04 - 2272.3Hz
0.7
-0.5
MODO 04 - 2369.1Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
02
MODO #3
-0.7
-0.5
-0.7
MODO 03 - 2600.8Hz
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
03
0.7
-0.5
-0.7
MODO 06 - 3302.7Hz
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
01
0.7
-0.5
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
Modelo
02
MODO 06 - 3368.3Hz
0.7
-0.5
-0.7
MODO 05 - 3201.8Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
-0.3
-0.5
-0.7
Figura B.1– Comparação dos modos para o rotor 225IIP
Modelo
03
MODO #4
-0.7
75
Anexo B Comparação dos Modos de Vibrar
Experimental
Calculado – na condição de erro mínimo
Modelo
01
MODO 01 - 632.9Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
-0.3
-0.5
-0.7
Modelo
02
MODO 01 - 610.9Hz
0.7
0.5
MODO #1
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
-0.5
-0.7
Modelo
03
MODO 01 - 548.3Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
-0.5
-0.7
MODO 03 - 1058.0Hz
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
-0.3
Modelo
01
0.7
-0.5
-0.7
0.5
MODO #2
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
Modelo
02
MODO 02 - 1038.7Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
Modelo
03
MODO 02 - 849.7Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
Modelo
01
MODO 04 - 1700.2Hz
0.7
-0.5
-0.7
0.5
MODO #3
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
Modelo
02
MODO 04 - 1739.7Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
Modelo
03
MODO 04 - 2269.7Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
Modelo
01
MODO 06 - 2634.1Hz
0.7
-0.5
-0.7
0.5
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
-0.5
-0.7
MODO 05 - 3014.7Hz
0.7
0.5
0.3
0.1
-0.1 0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3
-0.5
-0.7
Figura B.2 – Comparação dos modos para o rotor 250IVP
Modelo
03
MODO #4
0.3
Modelo
02
MODO 06 - 2713.6Hz
0.7
76
Anexo B Comparação dos Modos de Vibrar
Experimental
Calculado – na condição de erro mínimo
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
-0.3
-0.5
Modelo 01
MODO 01 - 327.3Hz
0.7
-0.7
0.5
0.3
MODO #1
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 02
MODO 01 - 327.5Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 03
MODO 01 - 328.8Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 01
MODO 02 - 601.9Hz
0.7
-0.7
0.5
0.3
MODO #2
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 02
MODO 02 - 606.2Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 03
MODO 02 - 567.1Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 01
MODO 04 - 992.1Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
-0.7
MODO 03 - 1377.0Hz
0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
-0.7
Figura B.3 – Comparação dos modos para o rotor 355IIP(A)
Modelo 03
MODO #3
Modelo 02
MODO 04 - 1050.8Hz
0.7
77
Anexo B Comparação dos Modos de Vibrar
Experimental
Calculado – na condição de erro mínimo
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
-0.3
-0.5
Modelo 01
MODO 01 - 396.8Hz
0.7
-0.7
0.5
0.3
MODO #1
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 02
MODO 01 - 394.9Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 03
MODO 01 - 393.4Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 01
MODO 02 - 719.9Hz
0.7
-0.7
0.5
0.3
MODO #2
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 02
MODO 02 - 720.8Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 03
MODO 02 - 683.0Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 01
MODO 04 - 1179.5Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
-0.7
MODO 03 - 1465.6Hz
0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
-0.7
Figura B.4 – Comparação dos modos para o rotor 355IIP(B)
Modelo 03
MODO #3
Modelo 02
MODO 04 - 1221.2Hz
0.7
78
Anexo B Comparação dos Modos de Vibrar
Experimental
Calculado – na condição de erro mínimo
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
1
1.2
1.4
1.6
-0.3
-0.5
Modelo 01
MODO 01 - 466.7Hz
0.7
-0.7
0.5
0.3
MODO #1
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 02
MODO 01 - 467.9Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 03
MODO 01 - 468.1Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 01
MODO 02 - 840.9Hz
0.7
-0.7
0.5
0.3
MODO #2
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 02
MODO 02 - 849.0Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 03
MODO 02 - 814.8Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
Modelo 01
MODO 04 - 1321.2Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
-0.7
MODO 03 - 1448.2Hz
0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
-0.3
-0.5
-0.7
Figura B.5 – Comparação dos modos para o rotor 355IIP(C)
Modelo 03
MODO #3
Modelo 02
MODO 04 - 1354.3Hz
0.7
79
Anexo B Comparação dos Modos de Vibrar
Experimental
Calculado – na condição de erro mínimo
Modelo
01
MODO 01 - 330.9Hz
0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
-0.3
-0.5
-0.7
Modelo
02
MODO 01 - 331.9Hz
0.7
0.5
MODO #1
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
-0.5
-0.7
Modelo
03
MODO 01 - 331.7Hz
0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
-0.3
Modelo
01
MODO 02 - 497.5Hz
0.7
-0.5
-0.7
0.5
MODO #2
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
Modelo
02
MODO 02 - 499.0Hz
0.7
-0.5
-0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
Modelo
03
MODO 02 - 475.5Hz
0.7
-0.5
-0.7
MODO 03 - 798.6Hz
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
Modelo
01
0.7
-0.5
-0.7
MODO 03 - 813.7Hz
0.5
MODO #3
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
Modelo
02
0.7
-0.5
-0.7
MODO 03 - 904.4Hz
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
Modelo
03
0.7
-0.5
-0.7
MODO 05 - 1218.1Hz
0.7
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
-0.5
Modelo
01
0.5
-0.7
MODO 05 - 1222.9Hz
0.5
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
-0.5
-0.7
MODO 04 - 1092.0Hz
0.7
0.5
0.3
0.1
-0.1 0
0.2
0.4
0.6
0.8
1
1.2
-0.3
-0.5
-0.7
Figura B.6 – Comparação dos modos para o rotor 315IIP
Modelo
03
MODO #4
0.3
Modelo
02
0.7
80
Anexo B Comparação dos Modos de Vibrar
Calculado – na condição de erro mínimo
MODO 01 - 137.2Hz
0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
2.5
3
3.5
4
-0.3
-0.5
Modelo 01
Experimental
MODO 01 - 136.9Hz
0.7
0.5
MODO #1
0.3
0.1
-0.1 0
0.5
1
1.5
2
2.5
3
3.5
4
-0.3
-0.5
Modelo 02
-0.7
MODO 01 - 125.4Hz
0.7
0.5
0.3
0.1
-0.1 0
-0.3
0.5
1
1.5
2
2.5
3
3.5
4
-0.5
Modelo 03
-0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
2.5
3
3.5
4
-0.3
-0.5
-0.7
Modelo 01
MODO 02 - 204.8Hz
0.7
0.5
0.3
MODO #2
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
Modelo 02
MODO 02 - 205.2Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
Modelo 03
MODO 02 - 187.2Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
-0.7
Modelo 01
MODO 03 - 397.1Hz
0.7
0.5
0.3
MODO #3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
-0.7
Modelo 02
MODO 03 - 402.1Hz
0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
-0.7
Modelo 03
MODO 03 - 411.4Hz
0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
Modelo 01
MODO 05 - 602.4Hz
0.7
-0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
-0.7
MODO 04 - 460.6Hz
0.7
0.5
0.3
0.1
-0.1 0
0.5
1
1.5
2
-0.3
-0.5
-0.7
Figura B.7 – Comparação dos modos para o rotor 560IIP
Modelo 03
MODO #4
Modelo 02
MODO 05 - 602.1Hz
0.7
Download