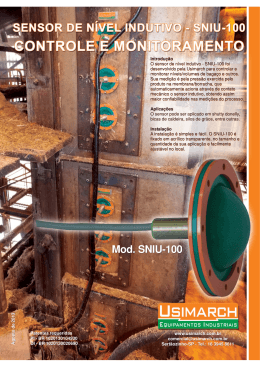
Medindo Distâncias por Ultrasom 1 Introdução A medição de distâncias é um problema que diversas áreas encontram, sejam elas industriais ou o segmento de consumo. A tecnologia de ultrassom é uma das tecnologias usadas pelas indústrias. Entretanto, um balanço entre custo e benefícios é importante. A medição de distâncias por ultrassom é normalmente utilizada quando uma medição sem contato é necessária. Esta é a solução apresentada pelo sensor da Tato. © Tato Equipamentos Eletrônicos Ltda. 2 Informações 2.1 Princípios do som e ultrasom O som é uma vibração mecânica transmitida por um meio elástico. A faixa de frequências que o ser humano consegue ouvir varia aproximadamente de 20Hz a 20.000Hz. Esta faixa é por definição, o espectro audível e varia de pessoa para pessoa e geralmente diminui com a idade. O ouvido é mais sensível a frequências em torno de 3.500Hz. Sons acima de 20.000Hz são conhecidos como ultrassom e sons abaixo de 20 Hz como infrassom. 2.2 Velocidade do Som A velocidade do som depende do meio que ele atravessa. Em geral, a velocidade do som é proporcional (a raiz quadrada da diferença) da “dureza” do meio e sua densidade. Esta é uma propriedade fundamental do meio. As propriedades físicas e a velocidade do som mudam de acordo com as condições do ambiente. A velocidade do som no ar depende da temperatura. No ar, a velocidade é de aproximadamente 345 m/s, na água de 1500 m/s e em uma barra de aço, de 5000 m/s. Um uso comum do ultrasom é para medição de distâncias, isto também é chamado de sonar. Sonar trabalha de um modo similar ao radar. Um pulso ultrasônico é gerado em uma direção. Se existir um objeto no caminho deste pulso, o pulso é refletido de volta para o emissor como um eco, e é detectado. Medindo e diferença de tempo entre a emissão do pulso e a recepção do eco, é possível determinar a distância do objeto. Os morcegos utilizam uma variação deste método para detector suas presas. 2.3 Reflexão do Som Para medir a distância que o som percorreu, ele precisa ser refletido de volta. Este som é uma onda transversal que bate em uma superfície plana. O som é então refletido, desde que as dimenções do objeto sejam grandes, comparado com o comprimento da onda. Veja a Figura 1. Superfície A superfície ideal do objeto é dura e lisa. Esta superfície reflete uma quantidade maior do sinal do que uma macia e porosa. Um eco fraco é resultado de um objeto pequeno um macio. Isto reduz a distância de operação do sensor e reduz a sua precisão. Distância Quanto menor for a distância do sensor ao objeto, mais forte será o eco. Deste modo, a medida que a distância aumenta, o objeto precisa ter melhores características de reflexão para retornar um eco suficiente. Tamanho Um objeto grande tem mais superfície para refletir o sinal do que um menor. A área de superfície reconhecida como alvo é a érea mais próxima ao sensor. 2 Ângulo A inclinação da superfície do objeto em relação ao sensor afeta o modo que o objeto reflete a onda. A porção perpendicular ao sensor retorna o eco. Se o objeto todo estiver a um ângulo grande, o sinal é então refletido para longe do sensor e o eco não é detectado. Superfície Distância Tamanho Ângulo Bom Bom Bom Bom Melhor Melhor Melhor Melhor Figura 1. Tipos de reflexão do som 2.4 Descrição Esta é uma pequena descrição do funcionamento do sensor. O seu funcionamento interno é muito mais complexo, visto que uma série de cálculos precisa ser feita durante todo o tempo de funcionamento. Figura 2 mostra os módulos básicos do sensor. Tx MCU Rx Amplificador Figure 2. UDM Basic Building Block O firmware do microcontrolador gera um trem de pulsos de 40 kHz. Depois que 10 pulsos são gerados, uma variável que mede o tempo é ativada. Esta variável guarda o tempo que o pulso leva até retornar e é usada para o cálculo da distância. 3 O trem de pulsos vai para o transmissor ultrasônico (Tx), é transmitido como ultrassom pelo ar como a Figure 2. Quando a onda é refletida pelo objeto, ela é capturada pelo receptor (Rx). Este sinal recebido é apmplificado pelo amplificador pois ela sofre uma atenuação no ar. Depois disto, o sinal retorna para o microcontrolador (MCU), onde é filtrada e usada para o cálculo da distância. O sensor fornece dois tipos de sinal de saída, o primeiro, chamado Eco é um pulso em nível alto que corresponde ao tempo de ida e volta do som, ou seja é necessário dividir este tempo por 2. O outro sinal é um sinal serial ASCII com velocidade de 2400bps, que representa a distância em milímetros. Veja um diagrama de tempos na Figura 3. TXa TXb Ultrasonic Signal High Level RX Low Level Serial Eco Filter behavior Figura 3. Diagrama de tempo Função dos Pinos: GND – Terra SER – Sinal ASCII serial, velocidade 2400bps TRIG – Disparo do sinal, um pulso em 0 inicia ECO – Pulso do Eco 5V - Alimentação 4
Baixar