INSTRUMENTAÇÃO E CONTROLO
CAPÍTULO VII
Revisões sobre Sistemas de
Controlo Contínuo
2012/2013
Bibli
Bibliografia
fi
•Katsuhiko Ogata, Engenharia do controlo
moderno Editora Prentice
moderno,
Prentice-Hall
Hall do Brasil,
Brasil 3º
Edição, 1997
•Curtis D.
D Johnson,
Johnson Controlo de Processos Tecnologia da Instrumentação, Edição da
Fundação Calouste Gulbenkian,
Gulbenkian 1991
• Marlin, T., Process Control: Designing
Processes and Control Systems for
Dynamic Performance, Edição da McGraw Hill,
New York
York, 2000
2000.
© Luis Filipe Baptista – ENIDH/MEMM
2
Í di
Índice
d
do capítulo
ít l
• Introdução
ç
• Bases matemáticas
• Transformada de Laplace
• Função de transferência
• Diagramas de blocos
• Resposta transitória de sistemas
© Luis Filipe Baptista – ENIDH/MEMM
3
Conceitos fundamentais
Introdução
Diagrama de blocos detalhado de um sistema em
anel fechado ->
> É necessário utilizar ferramentas
matemáticas para efectuar a sua análise teórica
© Luis Filipe Baptista – ENIDH/MEMM
4
Conceitos fundamentais
Introdução
Objectivos de um Sistema de Controlo
Automático
Manter a variável controlada o mais próximo
possível do valor de referência (set-point
p
p
)
Situação ideal: o erro ser sempre nulo
O critério de controlo responde
p
à seguinte
g
questão:
Até que ponto é eficiente?
A estabilidade e o amortecimento são os
parâmetros chave da análise de sistemas
© Luis Filipe Baptista – ENIDH/MEMM
5
Conceitos fundamentais
Introdução
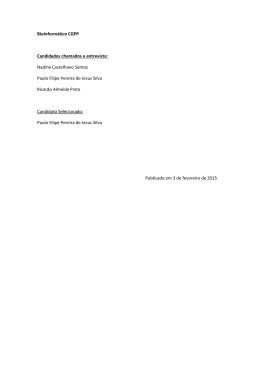
Respostas típicas de
um sistema a uma
entrada degrau (1):
(2) sobreamortecida
(3) críticamente
amortecida
(4)Subamortecida
(5)Oscilatória
(6) Oscilatória
((instável)
s á e)
© Luis Filipe Baptista – ENIDH/MEMM
6
Conceitos fundamentais
Análise do gráfico anterior
Entrada degrau – sinal de entrada usado
para testar o desempenho de sistemas de
controlo
Saída sobreamortecida – não oscila;
resposta bastante lenta
Críticamente amortecida – Não oscila;
resposta mais rápida
Subamortecida – resposta com oscilações
(overshoot); em certos casos é aceitável
© Luis Filipe Baptista – ENIDH/MEMM
7
Conceitos fundamentais
Análise do gráfico anterior
Oscilatória com amplitude constante
(instável)
á
– resposta oscilatória
ó
em torno
de um ponto médio; não é desejável
Resposta oscilatória com crescimento da
amplitude (instável) – resposta inaceitável; sistema instável ou sem controlo
Como analisar estas situações? Utilizar a
teoria de controlo contínuo/digital
© Luis Filipe Baptista – ENIDH/MEMM
8
Conceitos fundamentais
Introdução
Para estudar os sistemas de controlo do
ponto de vista teórico,
ó
é necessário
á
compreender os fundamentos
matemáticos
á
relativos a:
Variáveis e funções complexas
Equações diferenciais lineares
Transformada de Laplace
Transformada de Laplace inversa
Função
ã de
d transferência
f ê i
9
© Luis Filipe Baptista – ENIDH/MEMM
Conceitos fundamentais
Introdução
Para que é necessário usar ferramentas
matemáticas em controlo?
Entrada degrau
caudal do fluido de
arrefecimento
PROCESSO
Evolução da
temperatura
E
Exemplo
l
Porquê usar
ferramentas
matemáticas?
© Luis Filipe Baptista – ENIDH/MEMM
Como é que o
processo
influencia a
resposta?
• Tempo de resposta
p
da resposta
p
• Rapidez
• Tipo de resposta
10
Conceitos fundamentais
Para conhecer a resposta do sistema,
sistema é
necessário conhecer a dinâmica do processo.
Porquê?
Zona perigosa
Conhecer
C
h
a di
dinâmica
â i
do processo é
importante para a
SEGURANÇA!
© Luis Filipe Baptista – ENIDH/MEMM
11
Conceitos fundamentais
Bases Matemáticas para
análise
a
á se de Sistemas
S ste as de
Controlo
© Luis Filipe Baptista – ENIDH/MEMM
12
B
t
áti
Bases
matemáticas
Variáveis e funções complexas
Uma variável complexa s é definida por:
jω
S
ω1
ϑ1 1 ε R
ϑ1,ω1
ϑ1
ϑ
13
© Luis Filipe Baptista – ENIDH/MEMM
B
Bases
matemáticas
t
áti
Variáveis e funções complexas
Uma função complexa G(s) é definida por:
G(s)
( ) = G x + jjG y
O módulo e o argumento, são definidos por:
2
G( ) = G x + G y
G(s)
© Luis Filipe Baptista – ENIDH/MEMM
2
⎛ Gx ⎞
⎟
arg(G(s)) = arctg⎜
⎜G ⎟
⎝ y⎠
14
Bases matemáticas
Variáveis e funções complexas
Representação gráfica do módulo e do argumento
Im
θ
R l
Real
© Luis Filipe Baptista – ENIDH/MEMM
15
Bases matemáticas
Variáveis e funções complexas
Dada a função G(s):
G(s) = G x + jG y
Complexo conjugado de G(s):
G (s) = G x − jG y
Pontos do plano s em que a função G(s) é analítica –> pontos ordinários; pontos onde a função
não é analítica ->
> pontos singulares
© Luis Filipe Baptista – ENIDH/MEMM
16
Bases matemáticas
Variáveis e funções complexas
Polos da função G(s):
Os pontos onde G(s) ou as suas derivadas tendem para o
infinito designam-se por pólos
Exemplo:
k(s + z)
G(s)
( )=
(s + p1 )(s + p 2 ) 2
Zero da função: s=-z
s= z (ponto onde G(s) se anula)
Polos: s=-p1, s=-p2 (pontos onde G(s) tende para
infinito). (NOTA: s=-p2 -> pólo de 2ª ordem)
© Luis Filipe Baptista – ENIDH/MEMM
17
B
Bases
matemáticas
t
áti
Equações
lineares
Eq ações diferenciais
dife enciais linea
es
Forma canónica compacta
di y m di x
a1 i = ∑ bi i
∑
dt
dt
i =0
i =0
n
Forma
F
canónica
ó i d
desenvolvida
l id ((m<=n))
dn y
d n −1 y
dy
a n n + a n −1 n −1 + ... + a a
+ a0y =
dt
dt
dt
dmx
d m −1x
b m m + b m −1 m −1 + ... + b 0 x
dt
dt
© Luis Filipe Baptista – ENIDH/MEMM
18
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
Solução
S l ã homogénea
h
é
(resposta
(
t livre)
li
)–
solução da equação diferencial quando a
entrada x(t) é nula,
nula ou seja
seja, é a solução
da equação:
i
n
dy
ai i = 0
∑
dt
i =0
19
© Luis Filipe Baptista – ENIDH/MEMM
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
Solução
S l ã particular
ti l (resposta
(
t forçada)
f
d ) Definindo um operador diferencial D,
dado por:
n
d
D = n
dt
n
© Luis Filipe Baptista – ENIDH/MEMM
20
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
Solução homogénea (cont
(cont.):
):
a n D n y + a n −1D n −1 y + ... + a 1Dy + a 0 y = 0
(a n D n + a n −1D n −1 + ... + a 1D + a 0 )y = 0
Polinómio característico:
a n D n + a n −1D n −1 + ... + a 1D + a 0
Equação característica:
n
n −1
n
n −1
a D +a
D
+ ... + a 1D + a 0 = 0
© Luis Filipe Baptista – ENIDH/MEMM
21
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
Solução homogénea (cont
(cont.):
): As raízes ou soluções,
soluções são
D1 , D 2 ,...D n
Forma geral da solução:
• Solução homogénea - yh(t)
• Solução particular -> yp(t): solução da equação
diferencial, quando todas as condições iniciais são
nulas ou seja,
nulas,
seja a solução particular depende apenas
da entrada x(t)
y(t) = y(t) h + y(t) p
© Luis Filipe Baptista – ENIDH/MEMM
22
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
A solução geral pode ainda ser
decomposta noutras duas soluções:
• Solução em regime estacionário
(resposta estacionária) - é a parte da
equação geral que não se aproxima
de zero quando o tempo tende para
infinito.
© Luis Filipe Baptista – ENIDH/MEMM
23
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
• Solução em regime não estacionário
(resposta transitória) - é a parte da
equação
ã gerall que tende
t d para zero
quando o tempo tende para infinito
• A solução
l ã da
d equação
ã é dada
d d por:
y(t)
( ) = y(t)
( )estacionária + y(t)
( )transitória
© Luis Filipe Baptista – ENIDH/MEMM
24
Bases matemáticas
Equações diferenciais lineares
Solução geral de uma equação diferencial
Exemplo: Considere a seguinte solução de uma
equação diferencial
y(t) = e
−2 t
+ sin(πt )
A resposta em regime transitório e estacionário, são:
yrt (t ) = e −2t
; yre (t ) = sin((πt )
© Luis Filipe Baptista – ENIDH/MEMM
25
B
Bases
matemáticas
t
áti
Equações diferenciais lineares
Solução geral de uma equação diferencial
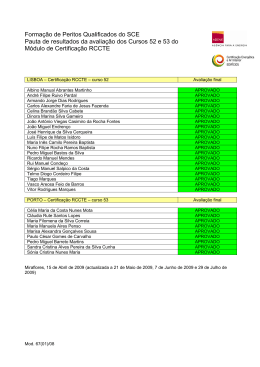
Exemplo
E emplo (cont.):
(cont ) yrt (cima) e yre (baixo)
(bai o)
© Luis Filipe Baptista – ENIDH/MEMM
26
B
Bases
matemáticas
t
áti
Equações diferenciais lineares
Solução geral de uma equação diferencial
Solução
Sol ção completa ((y=yre
e + yrt)
t)
© Luis Filipe Baptista – ENIDH/MEMM
27
B
Bases
matemáticas
t
áti
Equações diferenciais lineares
Código fonte do exemplo em MATLAB
% calculo da resposta
p
de um sistema
% vector de tempos – 0 a 6 seg. com intervalos de 0.01 seg.
t=0:0.01:6;
% calculo da resposta de um sistema
yt exp( 2*t);
yt=exp(-2*t);
ye=sin(pi*t);
% resposta transitória e estacionária
p (
)
subplot(211)
plot(t,yt),grid,ylabel('amplitude')
subplot(212)
plot(t,ye),grid,xlabel('tempo [s]'),ylabel('amplitude')
pause
% resposta total
subplot(111)
plot(t,ye,'-.',t,yt,'--',t,ye+yt),grid,
p
( ,y , , ,y , , ,y y ),g ,
xlabel('tempo [s]'),ylabel('amplitude')
© Luis Filipe Baptista – ENIDH/MEMM
28
Bases matemáticas
Transformada de Laplace
Vantagem da sua utilização: transforma
uma equação diferencial no domínio do
tempo numa equação algébrico no domínio complexo (s) ->
> mais fácil de manipu
manipular do que uma equação diferencial
Definição matemática:
∞
∞
0
0
L[f(t)] = F(s) = ∫ e −st dt[f(t)] = ∫ f(t)e −st dt
29
© Luis Filipe Baptista – ENIDH/MEMM
Bases matemáticas
Transformada de Laplace
Exemplo de aplicação: função exponencial
⎧ f(t) = 0
⎨
− at
f(t)
=
Ae
⎩
t<0
t≥0
Aplicação da Transformada de Laplace
∞
∞
L{A } = ∫ Ae
L{Ae
A e dt
d = A∫ e
− at
0
© Luis Filipe Baptista – ENIDH/MEMM
− at −st
0
− (s + a)t
A
d =
dt
s+a
30
Bases matemáticas
Transformada de Laplace
Tabelas de Transformadas de Laplace
© Luis Filipe Baptista – ENIDH/MEMM
31
Bases matemáticas
Transformada de Laplace
Tabelas de Transformadas de Laplace (cont.)
© Luis Filipe Baptista – ENIDH/MEMM
32
Bases matemáticas
Transformada de Laplace
Propriedades da Transformadas de Laplace (I)
© Luis Filipe Baptista – ENIDH/MEMM
33
Bases matemáticas
Transformada de Laplace
Propriedades
p
da
Transformadas
de
Laplace
p
(II)
© Luis Filipe Baptista – ENIDH/MEMM
34
Bases matemáticas
Transformada de Laplace
Exemplo de aplicação: Aplique a T.L. à seguinte
equação diferencial, supondo condições iniciais
nulas:
2
d y
dy
− 2t
+
3
+
2y
=
12e
dt 2
dt
Resolução
⎧d2y ⎫ 2
L⎨ 2 ⎬ = s Y(s)
⎩ dt ⎭
⎧ dy ⎫
L⎨ ⎬ = sY(s)
⎩ dt ⎭
L{2y} = 2Y(s)
1
L 12e-2t = 12
s+2
{
}
(propriedade 4)
(propriedade 3)
(propriedade 2)
(função 6 - Tabela)
35
© Luis Filipe Baptista – ENIDH/MEMM
Bases matemáticas
Transformada de Laplace
Resolução (cont.)
⎛ 1 ⎞
s 2 Y(s) + 3sY(s) + 2Y(s) = 12⎜
⎟
⎝s+2⎠
⎛ 1 ⎞
Y (s) * s 2 + 3s + 2 = 12⎜
⎟
s
+
2
⎝
⎠
(
)
12
Y(s) =
2
(s + 2)(s + 3s + 2)
© Luis Filipe Baptista – ENIDH/MEMM
36
Bases matemáticas
Transformada de Laplace inversa
Equação
ã
diferencial
no tempo
Equação
algébrica em
T.L.
s
T.L.
inversa
Solução no tempo da
q ç diferencial
equação
© Luis Filipe Baptista – ENIDH/MEMM
37
Bases matemáticas
Transformada de Laplace inversa
Operação: determinação de f(t) a partir da
Transformada de Laplace F(s)
L [F(s)] = f(t)
−1
Definição
ç
matemática
1 c+∞
st
f(t) =
∫ F(s)e ds
2πj c−∞
© Luis Filipe Baptista – ENIDH/MEMM
38
Bases matemáticas
Transformada de Laplace inversa
Forma de aplicação:
1 Aplica-se
1.
A li
a Transformada
T
f
d d
de L
Laplace
l
a
cada termo da equação diferencial
linear dada
2. Converte-se a equação diferencial
numa equação algébrica em s,
s e obtêmse a expressão da transformada de
Laplace da variável dependente através
de um rearranjo da equação algébrica
© Luis Filipe Baptista – ENIDH/MEMM
39
Bases matemáticas
Transformada de Laplace inversa
Forma de aplicação:
3. Obtêm-se a solução temporal da
equação diferencial, ou seja f(t), através
d aplicação
da
li
ã da
d transformada
t
f
d d
de
Laplace inversa à variável dependente
© Luis Filipe Baptista – ENIDH/MEMM
40
Bases matemáticas
Transformada de Laplace inversa
Exemplo: Considere um sistema físico que é
descrito pela seguinte equação algébrica em s a
seguir indicada. Supondo que se aplica uma
entrada degrau de amplitude 10, determine a
evolução da grandeza física ao longo do tempo
p
Resposta:
1
⎛
⎞
Y(s) = ⎜
⎟ × U(s)
⎝ 200s + 450 ⎠
⎛1⎞
U(s)
( ) = 10 × ⎜ ⎟
⎝s⎠
⎧U(s) − entrada no sistema
⎨
⎩ Y(s) − saída do sistema
((entrada degrau
g − > ppropriedad
p
e 2))
41
© Luis Filipe Baptista – ENIDH/MEMM
Bases matemáticas
Transformada de Laplace inversa
Resposta (cont.)
Manipulando a equação algébrica de modo a obter
uma expressão análoga à da tabela, tem - se :
10
1
1
1
=
=
Y(s) =
s(200s + 450) s(20s + 45) 20 s(s + 2.25)
1
1
→ 1 − e −at , log o :
Da tabela de T.L. − >
s(s
( + a))
a
1 1
1
y( t ) =
1 − e − 2.25 t =
1 − e − 2.25 t
20 2.25
45
(
(
© Luis Filipe Baptista – ENIDH/MEMM
)
(
)
)
42
Teoria do Controlo
Função de transferência
Relação entrada-saída de um sistema
Aplica-se
A li
somente
t a sistemas
i t
lineares
li
ini
variantes no tempo, ou seja considera-se
que os parâmetros do sistema físico não
variam ao longo do tempo
Representação gráfica
Entrada
Função
F
ã d
de
transferência
(em s ou t)
Saída
© Luis Filipe Baptista – ENIDH/MEMM
43
T
Teoria
i d
do C
Controlo
t l
Função de transferência (F.T.)
(F T )
Porquê usar funções de transferência dos
processos?
Exemplo: Num permutador de calor, a
bomba de água de arrefecimento falha.
falha
Quanto tempo irá decorrer até que o
permutador fique
p
q
em situação
ç
de ficar
destruído?
Para termos uma previsão do tempo que a
t
temperatura
t
atinge
ti
valores
l
insuportáveis
i
tá i
para o material, é necessário saber o
modelo dinâmico do permutador (F.T.),
(F T ) e
simular a situação de avaria
44
© Luis Filipe Baptista – ENIDH/MEMM
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Zona perigosa
Conhecer a função
que caracteriza a
dinâmica do
processo é
importante para a
SEGURANÇA!
© Luis Filipe Baptista – ENIDH/MEMM
45
Teoria do Controlo
Função de transferência
Representação matemática
Equação
Eq ação diferencial
dife encial do sistema físico (n>m)
a 0 y (n) + a 1 y (n −1) + ... + a n −1 y (1) + a n y =
b 0 x m + b1x (m −1) + ... + b m −1x (1) + b m
Função de transferência G(s):
Y(s) b 0s m + b1s m −1 + ... + b m −1s + b m
=
G(s) =
X(s)
a 0s n + a 1s n −1 + ... + a n −1s + a n
© Luis Filipe Baptista – ENIDH/MEMM
46
Teoria do Controlo
Função de transferência
Exemplo 1: sistema mecânico de translação
Considere um sistema massa-mola-amortecedor viscoso
viscoso.
Determine a função de transferência do sistema, considerando como entrada a força aplicada u(t) e a saída o
deslocamento da massa y(t).
y(t)
47
© Luis Filipe Baptista – ENIDH/MEMM
Teoria do Controlo
Função de transferência
Exemplo 1: sistema mecânico de translação
Resolução:
d2y
m × a = m 2 = ∑ f (Lei de Newton)
dt
d2y
dy
m 2 = − b − Ky + u
dt
dt
d2y
dy
m 2 + b + Ky = u
dt
dt
ms 2 Y(s) + bsY(s) + KY(s) = U(s)
G(s) =
© Luis Filipe Baptista – ENIDH/MEMM
Y(s)
1
=
U(s) ms 2 + bs + K
48
Teoria do Controlo
Função de transferência
Exemplo 2: sistema mecânico massa-mola
Considere
C
id
um sistema
i t
mecânico.
â i
Suponha
S
h
que o sistema é posto em movimento por
uma força do tipo impulso unitário (t).
(t)
Determine a resposta (oscilação)
resultante da aplicação desta força.
força
Suponha que o sistema está inicialmente
em repouso e que o coeficiente de atrito
viscoso b pode ser considerado nulo.
© Luis Filipe Baptista – ENIDH/MEMM
49
Teoria do Controlo
Função de transferência
Exemplo 2: sistema mecânico massa-mola
© Luis Filipe Baptista – ENIDH/MEMM
50
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Exemplo 2: sistema mecânico massa-mola
Resolução:
d2 x
m 2 + kx = δ(t)
dt
Aplicando a Transformada de Laplace
1
ms 2 + k
Aplicando a Transformada de Laplace inversa
ms 2 X(s) + kX(s) = 1 ⇒ X(s) =
x(t) =
⎛ k ⎞
1
⎟t
sin ⎜⎜
⎟
m
km ⎝
⎠
© Luis Filipe Baptista – ENIDH/MEMM
51
T
Teoria
i d
do C
Controlo
t l
Função de transferência
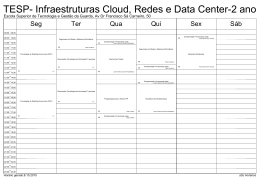
Exemplo 2: sistema mecânico massa-mola
Resolução:
Resol ção
A oscilação é um movimento harmónico simples (não há atrito)
A - Amplitude de oscilação
1
( )
(m)
km
ω - Frequência angular de oscilação
A=
ω=
k
m
(rad/s)
© Luis Filipe Baptista – ENIDH/MEMM
52
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Exemplo 2: sistema mecânico massa-mola
Gráfico da
resposta
(m=10 Kg;
K=200
N/m)
© Luis Filipe Baptista – ENIDH/MEMM
53
T
Teoria
i d
do C
Controlo
t l
Listagem do código fonte em Matlab
% calculo da resposta de um sistema massa-mola
% vector de tempos
t=0:0.01:5;
% características do sistema
m 10;
m=10;
k=200;
% função de transferência do sistema massa-mola
num=1;;
den=[10 0 200];
sys=tf(num,den);
% obtenção da saída por aplicação de uma entrada impulso
[y]=impulse(sys,t);
% gráfico da saida
plot(t,y),
xlabel('tempo [s]'),grid,ylabel('amplitude x [m]')
© Luis Filipe Baptista – ENIDH/MEMM
54
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Exemplo 3: sistema eléctrico RLC
Dete
Determine
mine a função
f nção de transferência
t ansfe ência entre
ent e a
tensão de entrada ei e a tensão de saída eo
R
ei
L
i
C
eo=ec
55
© Luis Filipe Baptista – ENIDH/MEMM
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Exemplo 3: sistema eléctrico RLC
Resol
Resolução
ção (I) - Equações
Eq ações do ci
circuito
c ito (Leis de
Kirchoff)
∑V = 0
(L i das
(Lei
d malhas)
lh )
VL + VR + VC = e i
1
⎛ di ⎞
L⎜ ⎟ + Ri + ∫ idt = e i
C
⎝ dt ⎠
© Luis Filipe Baptista – ENIDH/MEMM
56
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Resolução (II)
T ã de
Tensão
d saída
íd e 0 = VC
1
idt
∫
C
Aplicando a Transformada de Laplace
e 0 = VC =
1
LsI(s)
( ) + RI(s)
( )+
I(s)
( ) = E i ((s))
C
Cs
1
I(s) = E 0 (s)
Cs
© Luis Filipe Baptista – ENIDH/MEMM
57
T
Teoria
i d
do C
Controlo
t l
Função de transferência
Resolução (III)
1 ⎞
⎛
⎜ Ls + R +
⎟I(s) = E i (s)
Cs ⎠
⎝
I(s) = Cs × E 0 (s)
Substituin
b i i do
d I(s)
( ) na equação de
d E i (s),
( ) tem - se :
G(s) =
E 0 ((s))
1
=
E i (s) LCs 2 + RCs + 1
(sistema de 2
2ª ordem)
© Luis Filipe Baptista – ENIDH/MEMM
58
T
Teoria
i d
do C
Controlo
t l
Diagramas de blocos
Um sistema de controlo é composto por
diversos componentes ->
> representação
através de um diagrama de blocos
© Luis Filipe Baptista – ENIDH/MEMM
59
Teoria do Controlo
Diagramas de blocos
Funções de transferência típicas: obtêm-se
a partir das Regras da Álgebra de Blocos
Função de transferência em anel aberto:
B(s))
B(
= G(s)H(s)
E(s)
Função de transferência do ramo directo
C(s)
= G(s)
E(s)
© Luis Filipe Baptista – ENIDH/MEMM
60
Teoria do Controlo
Diagramas de blocos
Função de transferência em anel fechado:
C(s)) = G(s)E(s)
C(
G( )E( )
E(s)
( ) = R(s)
( ) − B(s)
()
B(s) = H(s)C(s)
E(s)
( ) = R(s)
( ) − H(s)C(s)
() ()
C(s) = G(s)[R(s) − H(s)C(s)]
C(s)
G(s)
=
R(s) 1 + G(s)H(s)
© Luis Filipe Baptista – ENIDH/MEMM
61
Teoria do Controlo
Diagramas de blocos
Função de transferência em anel fechado:
diagrama de blocos completo e simplificado
de um sistema em anel fechado
C(s)
G(s)
=
R( ) 1 + G(s)H(s)
R(s)
G( )H( )
© Luis Filipe Baptista – ENIDH/MEMM
62
Teoria do Controlo
Diagramas de blocos
Função de transferência em anel fechado:
diag ama de blocos completo e simplificado
diagrama
de um sistema em anel fechado
R(s)
E(s)
G(s)
C(s)
R(s)
G(s)
C(s)
1+G(s)H(s)
_
H(s)
63
© Luis Filipe Baptista – ENIDH/MEMM
T
Teoria
i d
do C
Controlo
t l
Diagramas de blocos
Função de transferência em anel fechado:
Caso especial: sistema com realimentação unitáunitá
ria (H(s)=1)
© Luis Filipe Baptista – ENIDH/MEMM
C(s)
G(s)
=
R(s) 1 + G(s)
64
Teoria do Controlo
Diagramas de blocos
Regras de construção de diagramas de
blocos
Exemplo: construir o diagrama de blocos de um
circuito RC
65
© Luis Filipe Baptista – ENIDH/MEMM
Teoria do Controlo
Regras de construção de diagramas de
blocos
Exemplo: circuito RC (cont
(cont.))
Escrevem-se as equações do circuito e
aplica-se
aplica
se a respectiva Transformada de
Laplace
ei − e0
i=
R
1
e0 = ∫ idt
C
© Luis Filipe Baptista – ENIDH/MEMM
Ei (s)− E0(s)
I(s)=
R
I(s)
E0(s)=
C
Cs
66
Teoria do Controlo
Regras de construção de diagramas de
blocos
Exemplo: circuito RC (cont.)
(cont )
Representa-se cada equação na forma de
bloco.
E (s)− E0(s)
I(s)= i
R
I(s)
E0(s)=
C
Cs
© Luis Filipe Baptista – ENIDH/MEMM
67
Teoria do Controlo
Regras de construção de diagramas de
blocos
Exemplo: circuito RC (cont.)
(cont )
Ligam-se os elementos num diagrama de
blocos completo
© Luis Filipe Baptista – ENIDH/MEMM
68
Teoria do Controlo
Diagramas de blocos
Regras de simplificação de diagramas de blocos
1 Eliminar
1.
Eli i
todos
d os blocos
bl
em cascata
2. Eliminar todas os anéis activos
3. Eliminar todos os anéis
é de realimentação
ã
secundários
4 Permutar
4.
P
t os pontos
t de
d soma para a esquerda
d
e os pontos de junção para a direita dos anéis
principais
5. Repetir estes passos até obter a forma
canónica.
© Luis Filipe Baptista – ENIDH/MEMM
69
Teoria do Controlo
Diagramas de blocos
Regras de Álgebra de Blocos (I)
© Luis Filipe Baptista – ENIDH/MEMM
70
Teoria do Controlo
Diagramas de blocos
Regras de Álgebra de Blocos (II)
© Luis Filipe Baptista – ENIDH/MEMM
71
Teoria do Controlo
Diagramas de blocos
Regras de Álgebra de Blocos (III)
© Luis Filipe Baptista – ENIDH/MEMM
72
Teoria do Controlo
Diagramas
de bl
blocos
Di
d
Exemplo: Reduza o seguinte diagrama de blocos
à sua forma mais simples (G(s)=C(s)/R(s)).
(G(s)=C(s)/R(s))
© Luis Filipe Baptista – ENIDH/MEMM
73
Teoria do Controlo
Diagramas de blocos
Exemplo: Resolução do exercício (I).
© Luis Filipe Baptista – ENIDH/MEMM
74
Teoria do Controlo
Diagramas de blocos
Exemplo: Resolução do exercício (II).
© Luis Filipe Baptista – ENIDH/MEMM
75
Teoria do controlo
Resposta transitória
Os sistemas físicos, desde que seja
conhecida
h id a sua ffunção
ã d
de ttransferência,
f ê i
podem ser testados para diversos tipos
de entradas
entradas. Assim,
Assim tem-se:
⎧
⎧impulso
⎪
⎪
aperiódico
iódi
s
d
⎨ degrau
⎪
⎪ rampa
⎪⎪
⎩
Tipos
p de sinais ⎨
d sinusoidal
i
id l
⎧onda
⎪
⎪periódicos⎪⎨ onda quadrada
⎪
⎪ onda triangular
⎪⎩
⎩
© Luis Filipe Baptista – ENIDH/MEMM
76
T
Teoria
i d
do C
Controlo
t l
Resposta transitória
Sinais aperiódicos – permitem obter a resposta
transitória de um sistema (é muito importante
em controlo)
p
Formas dos sinais aperiódicos
Impulso
δ(t)
1(t)
Degrau
t
Rampa
Aceleração
ç
t2
© Luis Filipe Baptista – ENIDH/MEMM
77
Teoria do Controlo
Resposta transitória
Critério de escolha dos sinais de teste
Entradas gradualmente variáveis no
tempo ⇒ função rampa
Perturbações bruscas ⇒ função degrau
Entradas bruscas ⇒ função impulso
© Luis Filipe Baptista – ENIDH/MEMM
78
Teoria do Controlo
Resposta transitória
Gráfico de resposta a uma entrada degrau
2
entra
ada
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
tempo [s]
2.5
3
3.5
4
0.4
saída
0.3
0.2
0.1
0
79
© Luis Filipe Baptista – ENIDH/MEMM
Teoria do Controlo
R
Resposta
de
t transitória
t
itó i – Sistemas
Si t
d
primeira ordem
R(s)
+
E(s)
-
C(s)
1
Ts
C(s)
1
=
R (s) Ts + 1
a)
R(s)
1
Ts + 1
C(s)
b)
© Luis Filipe Baptista – ENIDH/MEMM
80
Teoria do Controlo
Resposta transitória – Sistemas de
primeira ordem
Resposta a um
m degrau
deg a unitário
nitá io
⎛ 1 ⎞1
C(s) = ⎜
⎟
⎝ Ts + 1 ⎠ s
Aplicando a Transf. de Laplace inversa
c(0) = 0
⎧
⎪
c(t) = 1 − e − t/T
t≥0 ⎨
c(∞) = 1
⎪c(t
0 632
⎩ ( = T) = 0.632
© Luis Filipe Baptista – ENIDH/MEMM
81
Teoria do Controlo
Resposta transitória – Sistemas de
primeira ordem
Resposta a um
m degrau
deg a unitário
nitá io
© Luis Filipe Baptista – ENIDH/MEMM
82
T
Teoria
i d
do C
Controlo
t l
Resposta transitória – Sistemas de
segunda ordem
R(s)
+
E(s)
-
ω n2
s( s + 2ξω n )
C(s)
ω n2
C(s)
=
R (s) s 2 + 2ξω n s + ω 2n
a)
R(s)
ω n2
s 2 + 2ξω n s + ω n2
C(s)
b)
© Luis Filipe Baptista – ENIDH/MEMM
83
T
Teoria
i d
do C
Controlo
t l
Resposta transitória – Sistemas de
segunda ordem
Características dos sistemas de 2ª ordem
ωn → - frequência natural não amortecida, ou seja a
f
frequência
ê i a que o sistema
i t
oscilaria,
il i se o amortecit i
mento fosse nulo
ξ → - coeficiente de amortecimento do sistema
ξ × ω n → - atenuação
Tipos
p de sistemas de 2ª ordem
Sobreamortecido (ξ >1) -> não oscila
Críticamente amortecido (ξ =1) -> não oscila
Sub-amortecido (ξ < 1) -> oscila
© Luis Filipe Baptista – ENIDH/MEMM
84
T
Teoria
i d
do C
Controlo
t l
Resposta transitória – Sistemas de
segunda ordem
Sistema sub-amortecido: resposta ao degrau
⎛
ω 2n
C(s) = ⎜⎜ 2
2
⎝ s + 2ξωn s + ω n
⎞1
⎟⎟
⎠s
−ξ
t
e ωn
1 − ξ2
sin(ω d t + arctan g
)
c( t ) = 1 −
2
ξ
1− ξ
,t ≥ 0
ωd = ωn 1 − ξ 2
85
© Luis Filipe Baptista – ENIDH/MEMM
T
Teoria
i d
do C
Controlo
t l
Resposta transitória – Sistemas de
segunda ordem
Sistema críticamente amortecido: resposta ao
degrau
⎛ ω 2n
⎞1
⎟
C(s) = ⎜⎜
2 ⎟
⎝ (s + ω n ) ⎠ s
t
ω
n
c( t ) = 1 − e
(1 + ω n t )
−
© Luis Filipe Baptista – ENIDH/MEMM
86
T
Teoria
i d
do C
Controlo
t l
Resposta transitória – Sistemas de
segunda ordem
Sistema sobreamortecido: resposta ao degrau
C(s) =
ω 2n
(s + ξξωn + ω n ξ 2 − 1)(s + ξξωn − ω n ξ 2 − 1)
⎛ e −s1 t e −s 2 t ⎞
⎜⎜
⎟⎟
c( t ) = 1 +
−
2
s
s
2 ξ −1 ⎝ 1
2 ⎠
ωn
)
)
(
(
⎧⎪s = ω ξ + ξ 2 − 1
1
n
⎨
⎪⎩s 2 = ω n ξ − ξ 2 − 1
© Luis Filipe Baptista – ENIDH/MEMM
87
T
Teoria
i d
do C
Controlo
t l
Resposta transitória – Sistemas de
segunda ordem
Gráficos de
resposta
ao degrau
g
© Luis Filipe Baptista – ENIDH/MEMM
88
T
Teoria
i d
do C
Controlo
t l
Especificações da resposta transitória
89
© Luis Filipe Baptista – ENIDH/MEMM
T
Teoria
i d
do C
Controlo
t l
Especificações da resposta transitória
Tempo de atraso (td)
Tempo de subida (tr)
Tempo de pico (tp)
π
tp =
ωd
Máximo sobre
sobre-impulso
impulso Mp (overshoot)
Mp =
c( t p ) − c(∞ )
c(∞ )
© Luis Filipe Baptista – ENIDH/MEMM
×100%
Mp = e
−
ξπ
1− ξ 2
90
T
Teoria
i d
do C
Controlo
t l
Especificações da resposta transitória
Tempo de acomodação: tempo que o sistema
demora a entrar em regime estacionário
Existem dois critérios para caracterizar o tempo
de acomodação (critérios de 2 % e 5%). Deste
modo, tem-se:
4
4
t s = 4T = =
σ ξω n
(Criterio de 2%)
3
3
=
σ ξξω n
(Criterio de 5%)
t s = 3T =
© Luis Filipe Baptista – ENIDH/MEMM
91
T
Teoria
i d
do C
Controlo
t l
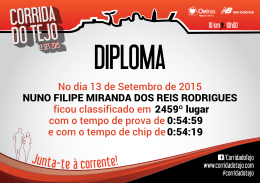
Exemplo de aplicação
A Figura seguinte representa um sistema
mecânico
â
massa-mola-amortecedor, que
corresponde por exemplo ao modelo
simplificado
f
de uma suspensão
ã de
automóvel. Quando se aplica uma
entrada
d em d
degrau P = 8.9 N, este
sistema oscila de acordo com o gráfico
representado
d na Figura.
i
Determine os valores de m, b e k do
sistema a partir da curva de resposta.
© Luis Filipe Baptista – ENIDH/MEMM
92
T
Teoria
i d
do C
Controlo
t l
Exemplo de aplicação
entra
ada P [N]
10
9.5
9
85
8.5
8
7.5
0
1
2
0
1
2
3
4
5
3
4
5
saíd
ída x [m]
0.04
0.03
0.02
0.01
0
tempo [s]
© Luis Filipe Baptista – ENIDH/MEMM
93
T
Teoria
i d
do C
Controlo
t l
Exemplo de aplicação
A função de transferência do sistema é
dada por:
© Luis Filipe Baptista – ENIDH/MEMM
94
T
Teoria
i d
do C
Controlo
t l
Exemplo de aplicação
O valor em regime estacionário de x(t) é
dado por aplicação
ã do Teorema do Valor
Final, ou seja:
© Luis Filipe Baptista – ENIDH/MEMM
95
T
Teoria
i d
do C
Controlo
t l
Exemplo de aplicação
O sobre-sinal máximo, obtêm-se através
do gráfico
á
e é dado por Mp=9.66%, o
que corresponde a ξ=0.6, ou seja:
© Luis Filipe Baptista – ENIDH/MEMM
96
T
Teoria
i d
do C
Controlo
t l
Exemplo de aplicação
Como:
© Luis Filipe Baptista – ENIDH/MEMM
97
T
Teoria
i d
do C
Controlo
t l
Exemplo de aplicação
Deste modo, a função de transferência
do sistema mecânico,
â
será
á dada por:
© Luis Filipe Baptista – ENIDH/MEMM
98
Baixar