UNIVERSIDADE FEDERAL DE ALAGOAS
CENTRO DE TECNOLOGIA
UNIVERSIDADE FEDERAL DE ALAGOAS
CENTRO DE TECNOLOGIA
MODELAGEM E CONTROLE DE UM SEPARADOR TRIFÁSICO
Aluno: Seldis Fernando dos Santos Júnior
Orientadores: Cristiane Holanda Sodré
Arioston Araújo de Moraes Júnior
RESUMO
A corrente proveniente da produção do petróleo é uma mistura constituída de água,
óleo, resíduos sólidos e gás natural associado e tal mistura primeiramente é separada
utilizando o separador trifásico. Essa separação deve ocorrer de maneira eficiente e o controle
adequado desse separador é necessário. O objetivo deste trabalho é de modelar e controlar o
separador trifásico utilizando o software Matlab/Simulink® e avaliar o desempenho do
separador trifásico mediante uma estrutura de controle nas variáveis nível e pressão. O
separador trifásico possui duas câmaras, a primeira câmara, chamada de câmara de separação,
a qual recebe a mistura e promove a separação por diferença de densidade. A fase aquosa,
mais densa deposita-se na base, na qual parte é retirada. A fase oleosa, menos densa forma
uma camada acima da fase aquosa vertendo através de uma chincana para a câmara de óleo. A
separação das fases é uma operação importante, uma vez que o petróleo e o gás apresentam
relevante interesse econômico para a indústria, outra vantagem é que o controle do processo
bem realizado permite absorver bem as flutuações geradas pela produção do petróleo, como
por exemplo, as golfadas, evitando que estas flutuações alcancem os outros equipamentos
deixando esta operação de separação mais estável. A simulação do processo em malha aberta,
ou seja, o sistema sem atuação do controle leva as variáveis de referência a níveis extremos.
Para o processo em malha fechada foram realizadas quatro perturbações (+10%, -10, -15% e
+80%) nas variáveis de controladas, utilizando um controlador proporcional integral (PI), o
controle para todas as perturbações foi muito eficiente atingindo resultados bastante
satisfatórios. Perturbações positivas de +10% e +80% onde a de +10% alcançaram o novo
estado estacionário rapidamente e a de +80% os níveis e a pressão estão altos, portanto
demorou mais tempo pelo fato de ser uma perturbação maior, mas o controle foi atingido e
perturbações negativas nas variáveis controladas de -15% e -10%, onde nade -10%
rapidamente foi atingido o novo estado estacionário e a pra perturbação de -15% houve uma
oscilação maior e resposta foi mais demorada pelo fato de ser uma perturbação maior.
Palavras-chaves: separador trifásico, modelar e controlar, avaliar o desempenho, evitando
flutuações.
ABSTRACT
The chain from the production of oil is a mixture consisting of water, oil, solid waste
and associated natural gas and this mixture is first separated using the three-phase separator.
This separation must occur efficiently and adequate control of this separator is required. The
objective of this work is to model and control the three-phase separator using Matlab /
Simulink® software and evaluate the performance of three-phase separator through a control
structure variables in level and pressure. The three phase separator has two chambers, the first
chamber, called a separation chamber which receives the mixture and promotes the separation
by density difference. The denser water phase settles to the bottom, which part is removed.
The oily phase less dense form a layer above the aqueous phase through a pouring Chincana
to the oil chamber. The separation of the phases is an important operation, since the oil and
gas have great economic interest to industry, another advantage is that the control process
performed well and allow to absorb fluctuations generated by the oil production, for example,
the slug, preventing these fluctuations reach others leaving this equipment more stable
operation of separation. The simulation process of the open loop, that is, the system takes no
action of the control variables refer to extreme levels. For the closed loop process four
disorders (+10%, -10, -15% and + 80%) were performed on variables controlled using a
proportional integral (PI) controller, the control for all disturbances was very efficient
reaching satisfactory results. Positive perturbations of + 10% and + 80% where 10% + of
reached the new steady state quickly and the 80% + levels are high and the pressure therefore
took longer because it is a larger disturbance, but the control was achieved and negative
disturbances in the subsidiaries of -15% and -10%, -10% variables where swim was quickly
reached the new steady state and the disturbance to -15% and there was a greater response
oscillation was longer because be greater disturbance.
Keywords: three-phase separator, modeling and control, evaluate performance, avoiding
fluctuations.
LISTA DE FIGURAS
Figura 1: Histórico de produção de petróleo no Brasil ............................................................ 11
Figura 2: Metas da Petrobras para produção de petróleo e LGN até 2020 ............................... 12
Figura 3: Investimentos de exploração e produção de 2014 até 2018 ...................................... 13
Figura 4: Localização geográfica da camada pré-sal ............................................................... 14
Figura 5- Esquema de uma instalação de produção de processamento primária complexa ..... 17
Figura 6: Esquema ilustrativo de um separador bifásico ......................................................... 18
Figura 7 – Esquema de um separador bifásico....
................................................................................................................................................. 20
Figura 8: Mostra as válvulas controladoras de pressão e níveis e as vazões de saída e entrada
gás, óleo e água......................................................................................................................... 21
Figura 9 – Esquema de um separador trifásico......................................................................... 23
Figura 10: Tipos de defletores utilizados para mudar a direção e velocidade do fluído ......... 24
Figura 11: Prato quebra-espumas ............................................................................................ 25
Figura 12: Prato quebra-ondas ................................................................................................. 25
Figura 13: Quebra-vórtice: (a) tubo perfurado, (b) plataforma e (c) cruzeta .......................... 26
Figura 14: Extratores de névoa (a) telas de arame (wire-mesh), (b) aletas (TP Vane) e (c)
placas cilíndricas ...................................................................................................................... 27
Figura 15: Placa coalescedora ................................................................................................. 28
Figura 16: Jatos espalhadores de areia (sander jat) .................................................................. 29
Figura 17 – Separador trifásico e seus internos ....................................................................... 31
Figura 18- Diagrama de blocos de um controlador liga-desliga ............................................. 36
Figura 19: Resposta da ação proporcional em malha aberta .................................................... 36
Figura 20 - Comportamento ação derivativa ............................................................................ 38
Figura 21 - Resposta da ação derivativa a uma variação do tipo degrau.................................. 39
Figura 22: Comparação das ações P, I, D e PID ...................................................................... 41
Figura 23 – Separador trifásico e suas variáveis ...................................................................... 42
Figura 24- Simulação do processo em malha aberta ............................................................... 52
Figura 25: Controle do nível de água em função de cinco variáveis utilizando diagrama de
blocos no Simulink ................................................................................................................... 54
Figura 26: Controle do nível de água em função de cinco variáveis utilizando diagrama de
blocos no Simulink ................................................................................................................... 55
Figura 27: Controle do nível de óleo em função de três variáveis utilizando diagrama de
blocos no Simulink .................................................................................................................. 55
Figura 28: Controle da pressão em função de 10 variáveis utilizando diagrama de blocos no
Simulink .................................................................................................................................. 56
Figura 29: Gráfico de nível total x tempo para a perturbação degrau de +10%. ...................... 57
Figura 30: Gráfico de nível água x tempo para uma perturbação de +10%. ............................ 57
Figura 31: Gráfico de nível óleo x tempo para uma perturbação de +10% .............................. 58
Figura 32: Gráfico de Pressão x tempo para uma perturbação de +10%. ................................ 59
Figura 33: Gráfico do Nível de Agua x tempo para uma perturbação degrau de -10% ........... 60
Figura 34: Gráfico do Nível total x tempo para uma total perturbação degrau de -10% no nível
.................................................................................................................................................. 60
Figura 35: Gráfico do Nível de Óleo x tempo para uma perturbação degrau de -10% no nível
de óleo ..................................................................................................................................... 61
Figura 36: Gráfico da pressão x tempo para uma perturbação degrau de +10% no valor inicial
da pressão. ................................................................................................................................ 62
Figura 37: Gráfico do Nível de água x tempo para uma perturbação degrau de +80%. .......... 63
Figura 38: Gráfico Nível total x tempo para uma perturbação degrau de +80%...................... 63
Figura 39: Gráfico do Nível de óleo x tempo para uma perturbação degrau de +80%. ........... 63
Figura 40: Gráfico da pressão x tempo para uma perturbação degrau de +80% no valor inicial
da pressão ................................................................................................................................. 64
Figura 41: Gráfico do Nível de água x Tempo para uma perturbação degrau de -15% no nível
de água inicial .......................................................................................................................... 62
Figura 42: Gráfico do Nível total x tempo para uma perturbação degrau de -15% no nível total
.................................................................................................................................................. 66
Figura 43: Gráfico do Nível de óleo x tempo para uma perturbação degrau de -15% no nível
de óleo ..................................................................................................................................... 66
Figura 44: Gráfico da pressão x tempo para uma perturbação grau de -15% no valor inicial da
pressão ..................................................................................................................................... 67
LISTA DE TABELAS
Tabela 1 – Faixa de valores das variáveis controladas para o processo em malha aberta........50
Tabela 2 – Parâmetros operacionais do separador trifásico..................................................... 52
LISTA DE ABREVIATURAS E SIGLAS
C : Comprimento de Tanque
CL : Câmara de óleo
CS : Câmara de separação
D : Diâmetro do Tanque
g : Aceleração gravitacional (m/s2)
G : Vazão de Gás
h : Altura
L : Vazão de Óleo
n : Número de mols
MM : Massa Molecular
R : Constante universal dos gases
Ra : Raio
S : Área
V : Volume
W : Vazão de água
x : Fração de abertura da válvula
θ : Ângulo
ρ : Massa específica
L : Óleo
A : Área da seção circular
D : Diâmetro(m)
Zcs : Comprimento da câmara de separação(m)
Zco : Comprimento da câmara de óleo(m)
Zt : Comprimento total do separador trifásico (m)
Hvert = Altura do vertedouro(m)
Po : pressão de descarga do óleo (psi)
Pg : pressão de descarga do gás (psi)
Pw : pressão de descarga da água(psi)
CVMAXO : Constante da válvula para o óleo(coeficiente máximo de vazão do óleo)
CVMAXA : Constante da válvula para a água(coeficiente máximo de vazão da água)
CVMAXG : Constante da válvula para o gás (coeficiente máximo de vazão do gás)
P : Pressão inicial no separador (psi)
PI : Controlador proporcional-integral
T : Temperatura do separador (k)
MMar : Massa molar do ar (Kg/gmol)
MMg : Massa molecular do gás(Kg/gmol)
ρo : Densidade do óleo (Kg/m3)
ρa: Densidade da água (Kg/m3)
xl : Fração de abertura da válvula de óleo
xw: : Fração de abertura da válvula de água
xg : Fração de abertura da válvula de gás
Subscritos
i : Entrada
o : Saída
t : Total
v : Verte
VERT
: Vertedouro
SUMÁRIO
1. INTRODUÇÃO ................................................................................................................................. 11
1.1. Pré-Sal ............................................................................................................................ 12
1.2. Objetivos ........................................................................................................................ 14
2. REVISÃO BIBLIOGRÁFICA ........................................................................................................... 16
2.1. Processamento primário ................................................................................................. 16
2.2. Equipamentos de separação ........................................................................................... 17
2.1.1 Separador bifásico .................................................................................................... 17
2.2.1.1 Seção de separação primária ............................................................................. 19
2.1.1.2 Seção de acumulação (coleta) de líquido .......................................................... 19
2.2.1.3 Seção de separação secundária .......................................................................... 19
2.2.1.4 Seção de aglutinação ......................................................................................... 19
2.2.2 Separação trifásica.................................................................................................... 20
2.2.3 Acessórios internos do vaso separador..................................................................... 22
2.2.3.1 Defletor de entrada ............................................................................................ 23
2.2.3.2 Pratos quebra-espuma ....................................................................................... 24
2.2.3.3 Placas quebra-ondas .......................................................................................... 25
2.2.3.4 Quebra-vórtice ................................................................................................... 26
2.2.3.5 Extrator de névoa ............................................................................................... 26
2.2.3.6 Pratos coalescedores .......................................................................................... 28
2.2.3.7 Jatos espalhadores de areia (sander jet) ............................................................. 28
2.2.4 Variáveis operacionais ............................................................................................. 29
2.2.4.1 Pressão............................................................................................................... 29
2.2.4.2 Temperatura ...................................................................................................... 29
2.2.4.3 Nível .................................................................................................................. 30
2.2.3.5 Problemas operacionais nos vasos separadores ................................................. 32
2.3. Controladores ................................................................................................................. 33
2.3.1. Ação liga-desliga (on-off) ....................................................................................... 35
2.3.2. Ação proporcional ................................................................................................... 36
2.3.3. Ação integral ........................................................................................................... 37
2.3.4. Ação derivativa ...................................................................................................... 38
2.3.5. Ação proporcional integral derivativa .................................................................... 40
3. METODOLOGIA .............................................................................................................................. 41
3.1. Modelagem .................................................................................................................... 41
3.1.1. Área de segmentos circulares ................................................................................. 43
3.1.2. Volume de cilindro de segmento circular .............................................................. 43
3.1.3. Balanço de líquido em Cs. ...................................................................................... 44
3.1.4. Balanço de óleo em CL. .......................................................................................... 44
3.1.5. Balanço de água em Cs. .......................................................................................... 45
3.1.6. Balanço de gás no tanque ....................................................................................... 45
3.1.7. Calculo dos volumes .............................................................................................. 46
3.1.8. Vazões de saída ...................................................................................................... 48
3.2. Funções de transferência ................................................................................................ 48
3.2.1. Funções de transferência do nível total na câmara de separação ............................ 49
3.2.2. Funções de transferência do nível água na câmara de separação ............................ 49
3.2.3. Funções de transferência do nível óleo na câmara de óleo ..................................... 49
3.2.4. Funções de transferência da pressão no separador trifásico .................................... 49
4. RESULTADOS E DISCUSSŌES ..................................................................................................... 51
4.1. Teste em malha aberta .................................................................................................... 51
4.2. Teste em malha fechada ................................................................................................. 48
5. CONCLUSÃO ................................................................................................................................... 58
REFERÊNCIAS ..................................................................................................................................... 59
11
1 INTRODUÇÃO
O petróleo é, atualmente, uma das principais fontes de energia da maioria dos países.
Além de sua relevância como fonte de energia, ele é empregado como matéria-prima para
plásticos, borrachas sintéticas, tintas, corantes, adesivos, solventes, detergentes, explosivos,
produtos farmacêuticos e cosméticos, entre outros, o que torna evidente sua importância para
a sociedade. (DALLAGNOL FILHO, 2005).
O petróleo é raramente produzido na forma de um fluido homogêneo, ocorrendo ao
longo da vida do campo petrolífero a produção simultânea de óleo, gás, água e contaminantes.
Em geral, esses campos petrolíferos são constituídos por plantas de processamento primário,
que são equipadas por instrumentos e sistemas que visam promover a separação primária dos
hidrocarbonetos (óleo e gás) (BRASIL et al., 2011)
A demanda por hidrocarbonetos acompanha o crescimento populacional, o que torna
de extrema importância à otimização da exploração e produção de campos de petróleo, que
tendem a diminuir gradativamente. Na Figura 1, pode ser observado histórico da produção de
petróleo no Brasil de junho de 2012 a junho de 2013, mas por conta de descobertas de jazidas
petrolíferas neste período, a produção oscilou bastante.
Figura 1: Histórico de produção de petróleo no Brasil.
Fonte: (DIEGUES e ARMANDO, 2013).
A corrente proveniente da produção do petróleo é uma mistura constituída de água,
óleo, resíduos sólidos e gás natural associado. Esta mistura primeiramente é separada
utilizando o separador trifásico. O Separador trifásico é responsável pela separação da fase
oleosa, da fase aquosa e do gás proveniente dos poços produtores. Estes separadores têm
12
formato cilíndrico e possuem internos que auxiliam na separação das fases que se encontram
misturadas.
O petróleo e o gás apresentam relevante interesse econômico para a indústria, sendo a
água, um dos contaminantes mais indesejados no processo de produção do petróleo, por
apresentar elevado teor de sal em sua composição, o que provoca uma série de problemas no
sistema de bombeio, transferência e na operação dos processos nas refinarias. (SILVEIRA, M.
A. C. R., 2006).
1.1 Pré-Sal
O termo pré-sal refere-se a um conjunto de rochas localizadas nas porções marinhas de
grande parte do litoral brasileiro, com potencial para a geração e acúmulo de petróleo.
Convencionou-se chamar de pré-sal porque forma um intervalo de rochas que se estende por
baixo de uma extensa camada de sal, que em certas áreas da costa atinge espessuras de até
2.000m. O termo pré é utilizado porque, ao longo do tempo, essas rochas foram sendo
depositadas antes da camada de sal. A profundidade total dessas rochas, que é a distância
entre a superfície do mar e os reservatórios de petróleo abaixo da camada de sal, pode chegar
a mais de 7 mil metros (PETROBRAS, 2013).
A exploração e a produção de petróleo e gás natural são atividades centrais da
Petrobras. A produção do pré-sal, em águas ultraprofundas já é uma realidade consolidada, a
seguir está à figura 2 que mostra quais são as metas da empresa até 2020.
Figura 2: Metas da Petrobras para produção de petróleo e LGN até 2020.
Fonte: (PETROBRAS, 2014).
A Petrobras desenvolve tecnologias para otimizar a produção e aumentar a vida útil
dos campos maduros, como por exemplo o programa de aumento da eficiência operacional
(Proef), que conseguiu reverter a tendência de queda da eficiência em unidades operacionais
da Bacia de Campos e do Rio de Janeiro. Muitos investimentos já foram e serão feitos em
13
torno do pré-sal por ser altamente rentável se os objetivos forem alcançados, a figura 3 mostra
de quanto será os investimentos de exploração e produção até 2018 (PETROBRAS, 2014).
Figura 3: Investimentos de exploração e produção de 2014 até 2018.
Fonte: (PETROBRAS, 2014).
A localização geográfica do pré-sal se encontra logo abaixo, que é uma camada de
aproximadamente 800 quilômetros de extensão por 200 quilômetros de largura.
Figura 4: Localização geográfica da camada pré-sal.
Fonte: (G1, 2014).
A palavra controle é normalmente utilizada em diversos contextos (termos como
controle e qualidade, controle de finanças, controle de produção entre outros, cobrem um
14
vasto espectro de atividades). Todos estes contextos estão baseados na existência de um
sistema, cujo comportamento se queira influenciar, e na liberdade de tomar ações, as quais irá
forçar o sistema agir de forma desejada (BISSELL, 1993).
O termo sistema é usado para descrever uma série de componentes que interagem em
torno de uma condição imaginária limite, havendo particular interesse nas suas entradas e
saídas, e na relação entre as mesmas. Um sistema de controle é assim chamado, quando a sua
saída é controlada para assumir um valor particular ou seguir uma determinada entrada
(BOLTON, 1995).
Com o advento dos computadores e a rápida expansão da capacidade de
processamento dos mesmos, cada vez mais, as tarefas desempenhadas por um sistema de
controle estão sendo executada de forma automática, com mais facilidade, simplicidade e
segurança. Este fato permitiu tanta à ampla difusão da utilização de controle automático,
como o desenvolvimento de tecnologia para tal (BALCHEN, 1999).
1.2 Objetivos
Os objetivos deste trabalho são mostrados logo abaixo:
Fornecer uma visão geral do processo de extração e produção de petróleo, e detalhar o
processo de separação da carga trifásico;
Simulação do separador trifásico em malha aberta, ou seja, sem controle, com o intuito
de observar o comportamento das variáveis níveis e pressão, utilizando o matlab;
Simulação do separador trifásico utilizando uma estrutura de controle, a partir do
simulink, para controlar as variáveis níveis e pressão;
Realizar uma perturbação degrau nas variáveis de controle e mantê-las dentro no valor
de referência, onde para a malha de controle utiliza-se um controlador proporcionalintegral (PI).
Comparação dos resultados em malha aberta e fechada.
Este trabalho está organizado em cinco capítulos. O capítulo 1 traz uma introdução do
trabalho. O Capítulo 2 traz a revisão bibliográfica dos temas abordados. No Capítulo 3,
15
encontra-se a modelagem dinâmica de um separador trifásico (água-óleo-gás) e as funções de
transferência da pressão no separador, do nível total e de agua na câmara de separação e do
nível de óleo na câmara de óleo.
O Capítulo 4 apresenta os resultados e discussões obtidos através do uso do
controlador proporcional integral. Finalmente, o Capítulo 5 expõe as conclusões deste
trabalho.
16
2
REVISÃO BIBLIOGRÁFICA
2.1 Processamento primário do petróleo
O processamento primário de petróleo consiste na primeira etapa da fase de produção,
na qual o petróleo passa após sair do reservatório e alcançar a superfície. Normalmente, temse a produção simultânea de gás, óleo e água, juntamente com impurezas (BRASIL et al.,
2011).
Plataformas offshore de produção de petróleo possuem plantas de processamento para
separação do óleo, gás e água produzidos. A qualidade desta separação no local de extração é
fundamental para agregar mais valor ao óleo produzido. O bom desempenho das malhas de
controle da planta é um dos principais fatores para manter os produtos dentro das
especificações de qualidade. Apesar da relativa simplicidade dos processos de separação,
estas plantas operam com grande variação de vazão, devido às características dos métodos de
elevação e escoamento dos poços produtores.
O principal interesse econômico dessa atividade é na produção de hidrocarbonetos
(óleo e gás), sendo necessário dotar os campos marítimos e terrestres de facilidades de
produção, que são instalações destinadas a efetuar, sob condições controladas a separação do
óleo, do gás e da água. (BRASIL et al., 2011). O processamento primário de petróleo tem
como objetivos:
Separação das fases oleosa, gasosa e aquosa, nos equipamentos conhecidos como
separadores trifásicos;
Tratar a fase oleosa para redução da água emulsionada e dos sais dissolvidos;
Tratar a fase gasosa para redução do teor de água, e se necessário de outros
contaminantes;
Tratar a fase aquosa para descarte e/ou reinjeção nos poços produtores.
Dependendo do tipo de fluidos produzidos e da viabilidade técnico- econômica, uma
planta de processamento primário pode ser simples ou complexa; as mais simples efetuam
apenas a separação gás/óleo/água, enquanto que as mais complexas incluem o
condicionamento e compressão do gás, tratamento e estabilização do óleo e tratamento da
água para reinjeção ou descarte (THOMAS, 2004).
17
O objetivo do processamento primário de petróleo é de separar gás, óleo, água e tratar
essas correntes de maneira a especifica-las aos padrões de envio aos terminais e refinarias
(óleo e água) e de descarte (água oleosa). Normalmente, a separação e o tratamento dessas
fases são feitos numa planta de processamento, por meio do uso de produtos químicos,
aquecimento e vasos separadores.
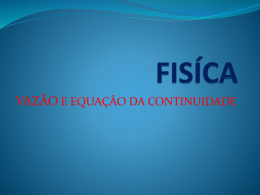
A Figura 5 apresenta um esquema com as principais etapas do processamento
primário de petróleo. No término do processamento primário, têm-se os fluxos separados de
óleo e gás, além do descarte da água produzida.
Figura 5- Esquema de uma instalação de produção de processamento primária complexa.
Fonte: BRA SIL et al. ( 20 11).
Fonte: Brasil et la.(2011).
2.1 Equipamentos de separação
2.2.1 Separador bifásico
. Os vasos separadores gravitacionais podem ser cilíndricos ou esféricos, horizontais
ou verticais, bifásicos ou trifásicos. A separação bifásica é a separação da fase gasosa da fase
líquida, ou seja, o gás é separado do líquido, que corresponde ao óleo mais água (SOUZA,
2012).
O esquema a seguir mostra um separador cilíndrico horizontal bifásico, ilustrando suas
seções internas de funcionamento, onde ocorrem, por meios de mecanismos físicos, as várias
etapas de separação gás/líquido (bifásico).
18
Figura 6: Esquema ilustrativo de um separador bifásico.
Fonte: SOUZA, 2012.
Os meios físicos que atuam no interior do vaso para separar o gás do líquido são
basicamente: separação inercial, força centrífuga, diferença de densidades, aglutinação das
partículas e ação da gravidade.
Isto ocorre de forma descrita no quadro a seguir:
Quadro 1: Descrição dos meios físicos que existem no interior do vaso.
Ao chocar-se com uma dada superfície, o fluído
sofre mudança brusca de velocidade e direção,
Separação Inercial
fazendo o gás desprender-se do líquido, devido à
inércia que este possui,
Ao ser impelido a um movimento giratório por um
Força Centrífuga e Diferença
difusor, as fases do fluído se separam, por
de Densidades
adquirirem forças centrífugas diferentes, em função
da diferença de densidades.
Aglutinação das Partículas
O contato em uma superfície de gotículas de líquido
dispersas
no
gás
facilita
sua
aglutinação
e
consequente decantação.
Ação da gravidade e diferença
O fluído mais pesado é decantado e, durante certo
de densidades
tempo de retenção, continua liberando bolhas de gás.
Fonte: SOUZA, (2012).
19
A ocorrência desses quatro mecanismos pode ser identificada nas quatros seções do
vaso separador: seção de separação primária, seção de acumulação (coleta) de líquido, seção
de separação secundária e seção de aglutinação.
2.2.1.1 Seção de separação primária
O fluído choca-se com defletores na entrada do vaso, onde ocorre mudança brusca de
velocidade e direção, fazendo com que o gás se desprenda e o líquido se precipite para o
fundo do vaso (NUNES et la. , 2011).
Nesta seção ocorre a absorção das golfadas do fluído e a separação da maior parte do
líquido, precipitando as gotículas de maior diâmetro para o fundo. Em separadores verticais
costuma-se direcionar o fluído em movimento giratório pelas paredes do vaso, promovendo a
separação líquido-gás pela força centrífuga e diferença de densidades das fases do fluído.
2.2.1.2. Seção de acumulação (coleta) de líquido
Nesta seção são separadas as bolhas de gás ainda dispersas no interior do líquido após
a separação primária. Para isso, o líquido deve permanecer retido durante certo tempo
(chamado tempo de retenção ou residência), que deve variar de 3 a 4 minutos (NUNES et la. ,
2011).
2.2.1.3. Seção de separação secundária
Aqui são separadas as gotículas menores de líquido carreadas pelo gás após a
separação primária, ocorrendo decantação por gravidade. Quanto menor for à turbulência do
gás, melhor será a eficiência de separação nesta seção (NUNES et la. , 2011).
2.2.1.4. Seção de aglutinação
As gotículas de líquido arrastadas pelo gás, não são separadas nas seções anteriores,
são aglutinadas em meio porosos e recuperadas por gravidade, nos extratores de névoa
(demister) instalados na parte superior do vaso (NUNES et la. , 2011).
O óleo resultante do poço não atende às especificações de comercialização, devendo
passar por um pré-tratamento para que então possa ser refinado ou comercializado em sua
forma bruta. Emulsões de água em óleo são prontamente formadas no processo de extração do
óleo cru, causando problemas em diversas operações de downstream. A corrosão de
20
tubulações, bombas e equipamentos de processos, assim como a desativação de catalisadores
são consequências da presença de gotículas de água no óleo (BEHIN e AGHAJARI, 2008).
Em geral, os separadores horizontais (figura7) são mais eficientes, pois apresentam
uma maior área interfacial que permite uma melhor separação gás/líquido. Esses separadores
costumam ser usados em sistemas que apresentam emulsões e altas razões gás/óleo. As
desvantagens estão relacionadas ao manuseio dos sólidos produzidos (a geometria dos vasos
verticais facilita a remoção) e à menor capacidade de absorver grandes golfadas (variações de
fluxo) (THOMAS, 2004).
Figura 7 – Esquema de um separador bifásico.
Fonte: Thomas (2004).
2.2.2. Separação Trifásica
A separação trifásica é a separação do gás, do óleo e da água livre. Devido à diferença
de densidades entre o óleo e água e ao tempo de retenção do fluído na seção de acumulação
de líquido, apareceram:
Uma camada de água no fundo vaso (água livre);
Uma camada de sobre ela de emulsão água-óleo;
Uma camada de óleo sobre esta última.
Para separar e remover esta água livre decantada são utilizados separadores trifásicos
(também chamados de extratores de água livre), idênticos aos separadores bifásicos, com
apenas alguns dispositivos a mais para esta finalidade e possuem mais espaço, este espaço a
mais deve ser deixado para a decantação do líquido. Os separadores trifásicos são utilizados
21
para separar e remover qualquer água livre (camada de água limpa que aparece no fundo, após
a decantação de uma emulsão óleo/água) que possa estar presente no processo. Separadores
gravitacionais são dispositivos de separação hidrodinâmicos desenvolvidos para remover
material particulado, óleos e gorduras e partículas flutuantes da água através do assentamento
gravitacional e de barreiras físicas (STORMWATER, 2006).
A figura 8 ilustra um separador trifásico horizontal trifásico, dotada de câmara de
acúmulo de óleo obtida com a instalação de uma placa vertedoura, com a finalidade de verter
o óleo pela parte superior e separar a câmara da seção de acúmulo de líquido. O esquema
abaixo mostra também as válvulas controladoras de pressão e de níveis de óleo e interface,
que, por meio de equipamentos eletropneumáticos, fazem o controle do fluxo de saída dos
fluídos e das variáveis de operação do vaso (pressão e níveis).
Figura 8: Mostra as válvulas controladoras de pressão e níveis e as vazões de saída e entrada gás, óleo e água.
Fonte: SOUZA, (2012).
Ao entrar no vaso e chocar-se com o defletor de entrada (placa defletora), o fluído
sofre mudança brusca de direção e velocidade, fazendo o gás se desprender do líquido e este
precipitar-se para o fundo do vaso. Essa parcela de gás e as bolhas de gás que se separam mais
lentamente do líquido acumulado no fundo seguem para a saída na parte superior do vaso,
onde deixam aglutinadas, no meio poroso do extrator de névoa, as gotículas de líquido
arrastadas, seguindo por uma tubulação de saída.
As gotículas de líquido em suspensão na corrente de gás no interior do vaso, mais as
retidas no extrator de névoa, são recuperadas por gravidade para o fundo do vaso. Por
diferença de densidade e pela ação da gravidade, durante certo tempo de retenção do líquido
22
no interior do vaso, a água se separa do óleo, criando uma camada inferior de água
relativamente limpa (água livre), e uma superior de óleo relativamente limpo.
A água livre segue por uma tubulação de saída pelo fundo do vaso, dotada de válvula
de controle de nível de interface água-óleo, que regula a vazão de saída da água. E o óleo,
após verter pela parte superior do vertedouro, se acumula na câmara de óleo e segue por uma
tubulação de saída pelo fundo da câmara, dotada de válvula de controle de nível de óleo, que
regula a Vazão de saída do óleo.
2.2.3 Acessórios internos do vaso separador
A maioria dos métodos de separação de óleo e água possui suas aplicações reduzidas
devido ao alto custo de capital e operacional, à baixa eficiência de separação e ao alto tempo
de residência dos processos de separação. Tradicionalmente, a separação primária acontece
através de separadores gravitacionais horizontais, mas por vezes é utilizado também o
separador trifásico vertical (BEHIN e AGHAJARI, 2008).
A Figura 9 mostra um esquema típico de um separador trifásico (THOMAS, 2004).
Figura 9 – Esquema de um separador trifásico
Fonte: Thomas (2004).
A seguir é mostrado cada um dos acessórios internos do vaso separador (SOUZA,
2012).
23
2.2.3.1 Defletor de Entrada
Defletor de entrada é considerado o dispositivo primário de separação e sua finalidade
é causa uma mudança brusca na velocidade e direção dos fluídos e assim, separar o gás do
líquido. São muitos os tipos desse dispositivo.
As próximas ilustrações mostram três modelos utilizados: placa plana, calota esférica e
defletor centrífugo.
Os dois primeiros defletores são defletores de impacto (placa plana e calota esférica).
O tipo placa plana costuma promover um espalhamento maior do líquido, o que leva aumentar
os problemas de arraste de líquido pela tubulação de saída do gás e maiores emulsões de água
em óleo. A vantagem do uso do tipo calota esférica é que ele cria uma menor perturbação do
fluído (menor espalhamento) do que as placas planas, minimizando tais problemas.
O terceiro tipo é um defletor centrífugo, contendo uma entrada tipo ciclone, que usa
força centrífuga, mais do que a agitação mecânica para separação líquido e o gás.
Figura 10: Tipos de defletores utilizados para mudar a direção e velocidade do fluído.
Fonte: SOUZA, (2012).
2.2.3.2 Pratos quebra-espuma
Normalmente ocorre formação de espuma na interface gás-óleo, quando as de gás são
liberadas da mistura líquida. Essa espuma pode ser estabilizada com a adição de produtos
químicos (antiespumante) na corrente de entrada do separador. Como o uso de antiespumante
prejudica o refino do óleo, uma solução eficaz para reduzir a utilização deste produto é fazer a
24
espuma passar através de placas paralelas inclinadas, como mostra a ilustração. Ao entrarem
em contato com as placas, as bolhas de espuma se quebram, conduzindo ao coalescimento da
parte líquida nelas contida.
Figura 11: Prato quebra-espumas.
Fonte: SOUZA, (2012).
2.2.3.3 Placas quebra-ondas
Em vasos horizontais às vezes é necessário instalar quebra-ondas. São placas verticais
que se estendem pelo nível de óleo e pela interface óleo-água no plano perpendicular à
direção de fluxo, para evitar a propagação de ondas causadas pelas golfadas de líquido,
permitindo maior eficiência no controle desses níveis.
Em plataformas marítimas flutuantes, tais placas reduzem o efeito do balanço do mar
sobre o nível de líquido dos vasos. É comum também o uso de placas verticais perfuradas,
como mostra a ilustração.
Figura 12: Prato quebra-ondas.
Fonte: SOUZA, (2012).
25
2.2.3.4 Quebra-vórtice
O quebra vórtice é um dispositivo instalado no bocal de saída de líquido, no fundo do
vaso, com a finalidade de interromper o desenvolvimento do vórtice, quando a válvula de
controle é aberta e o líquido começa a fluir. O fluxo de líquido pelo bocal de saída no fundo
do vaso pode criar o vórtice, que é o redemoinho de líquido criado no ponto de saída do vaso.
O vórtice pode succionar algum gás e arrastá-lo com o líquido de saída, ou mesmo arrastar
óleo pela saída de água.
A figura 13 mostra três tipos de quebra-vórtice: Tubo perfurado, plataforma e cruzeta.
Figura 13: Quebra-vórtice: (a) tubo perfurado, (b) plataforma e (c) cruzeta.
Fonte: SOUZA, (2012).
2.2.3.5 Extrator de névoa
O extrator de névoa, também chamado de demister, é o dispositivo instalado na saída
de gás pela parte superior do vaso, composto de um meio poroso, cuja finalidade é aglutinar
as gotículas de líquido arrasta pelo gás, para, em seguida, serem recuperadas por gravidade. A
ilustração mais a frente apresenta os três tipos mais comuns:
Almofadas de telas de arame (wire-mesh);
Aletas (TP Vane);
Placas cilíndricas.
Extratores de névoa tipo wire-mesh
São feitos de esteiras tecidos com fios de aço inox finamente entrelaçados em matriz
envolta por um cilindro hermeticamente empacotado. As gotículas de líquidos presentes na
corrente de gás colidem com os fios da esteira e coalescem.
26
A eficiência deste dispositivo depende amplamente da velocidade do fluxo de gás. Se
a velocidade é muito baixa, o gás passará através da malha de arames sem que as gotículas
colidam e coalesçam e se a velocidade é muito alta, as gotículas coalescidas serão novamente
arrastadas. Esse tipo de extrator de névoa é mais susceptível a obstruções do que os demais.
Extratores de névoa tipo TP Vane (Vane Type)
São feitos de aletas ou placas corrugadas. A corrente de gás é forçada a ter um fluxo
laminar entre as corrugadas, fazendo as gotículas colidirem com a superfície das placas, onde
coalescem e caem pela ação da gravidade.
Extratores de névoa tipo placas cilíndricas
As placas são configuradas como cilindros concêntricos, algumas vezes corrugados,
em cuja superfície as gotículas de líquido colidem e coalescem. Em todos esses tipos ocorre o
fenômeno da aglutinação das partículas, em que gotículas de líquido dispersas no gás têm sua
aglutinação facilitada pelo contato com uma superfície e consequentemente decantação.
Figura 14: Extratores de névoa (a) telas de arame (wire-mesh), (b) aletas (TP Vane) e (c) placas cilíndricas.
Fonte: SOUZA, (2012).
2.2.3.6 Pratos coalescedores
Pratos coalescedores podem ser utilizados para aumentar a aglutinação das gotículas
de óleo presentes na água ou gotas de água presentes no óleo. Placas metálicas cruzadas entre
si, normalmente em ângulo de 45° graus, conforme a figura a seguir, permite que gotículas de
óleo percorram a superfície inferior de cada placa, no sentido ascendente, juntando-se em
27
gotas maiores. Do mesmo modo, permitem que gotas de água percorram a superfície superior
de cada placa, no sentido descendente, que pela ação gravitacional promovendo a
coalescência de gotas das fases dispersas, resultando em um número menor de gotas, mas com
um diâmetro maior. Conforme a Lei de Stokes (PERRY e CHILTON, 1980), gotas de
diâmetro maior favorecem a separação.
Figura 15: Placa coalescedora.
Fonte: SOUZA, (2012).
Com a instalação de pratos coalescedores, é possível aumentar a capacidade de
separação de vasos já instalados ou reduzir o tamanho de vasos separadores novos.
2.2.3.7 Jatos espalhadores de areia (sander jet)
Um dos problemas operacionais dos separadores é o acúmulo de areia e sólidos no
fundo do vaso, por tornarem menos o seu volume, além de criar obstruções no bocais e
tubulações de saída. Para minimizar a frequência de parada do vaso para remoção destes
sólidos, utiliza-se o sistema de jatos de água para espalhar a areia (sander jet).
Um fluído a alta pressão, usualmente água produzida, é bombeado por uma tubulação
que se ramifica no fundo do vaso, saindo em forma de jatos de água, que suspendem a areia
carreando-a pelos drenos. Com prevenção da obstrução dos drenos pela areia sedimentada,
coletores de areia são usados para cobrir as saídas. Esses coletores são calhas invertidas com
aberturas laterais.
28
Figura 16: Jatos espalhadores de areia (sander jat).
Fonte: SOUZA, (2012).
2.2.4 Variáveis operacionais
As condições de operação de um separador são definidas por pressão, temperatura e
nível (SOUZA, 2012).
2.2.4.1 Pressão
A pressão ótima de separação determina o ajuste da pressão de operação do separador.
Quando essa pressão é reduzida, o volume de gás liberado pelo óleo aumenta. Portanto,
quanto menor a pressão de separação, maior será a quantidade de gás ocupando o mesmo
espaço no interior do vaso. Em consequência, há um aumento na velocidade do gás, podendo
arrastar gotículas de óleo na corrente de gás. Para que isso não ocorra, a vazão de entrada
deverá ser reduzida, fazendo o separador ter sua capacidade diminuída.
Logo, a redução na pressão de separação diminui a capacidade do separador. No
sentido contrário, o aumento da pressão de separação permite um aumento na capacidade do
separador, embora diminua o volume de gás liberado pelo óleo.
2.2.4.2 Temperatura
A temperatura de separação é um parâmetro que depende das características do óleo
processado. Normalmente, quanto maiores à viscosidade e a densidade do fluído, maior
deverá será a temperatura de separação. O aumento de temperatura geralmente provoca uma
redução da densidade do óleo e aumento da diferença em relação à água, facilitando sua
separação, por meio da sedimentação.
O aumento da temperatura permite também minimizar a formação de espuma na
separação gás-óleo. Contudo, aumento na temperatura do separador causa na vazão de gás,
efeito semelhante à redução na pressão de separação.
29
2.2.4.3 Nível
Se o separador recebe um fluxo regular, então é possível manter estáveis o nível de
óleo e a velocidade de circulação de gás, obtendo a máxima eficiência de separação.
Entretanto, um mesmo separador pode ser ajustado para condições diferentes de operação, tais
como:
Máxima capacidade ao óleo;
Máxima capacidade ao óleo e ao gás;
Máxima capacidade ao gás.
Para tanto, os instrumentos de controle são ajustados de modo a obter a condição
operacional desejada.
Separadores
gravitacionais
são
dispositivos
de
separação
hidrodinâmicos
desenvolvidos para remover material particulado, óleos e gorduras e partículas flutuantes da
água através do assentamento gravitacional e de barreiras físicas (STORMWATER, 2006).
Separadores gravitacionais baseiam-se no princípio de que fluidos imiscíveis se
separam quando em repouso, com os fluidos mais leves no topo e os fluidos mais pesados no
fundo. Seu funcionamento é simples: uma mistura de fluidos (por exemplo, gás e óleo) que
sai do reservatório entra no tanque de separação. O gás é separado na parte superior do tanque
enquanto o líquido é coletado na parte inferior (ASSKILDT e HANSSON, 2000).
Numa planta de processo convencional (figura 16), o separador gravitacional trifásico
é o primeiro equipamento do sistema de separação. Além de dividir a mistura em três
correntes, água, óleo e gás, o separador trifásico deve amortecer as perturbações de carga
(conhecidas como golfadas ou slugs).
Figura 17 – Separador trifásico e seus internos.
Fonte: Silva (2007).
30
O separador trifásico deve prover uma separação adequada das fases aquosa, oleosa e
gasosa e, ainda, absorver as flutuações da carga (devido ao fenômeno das golfadas descrito
anteriormente). Isto é, este equipamento, conhecido na indústria de petróleo como separador
de produção, exerce também a função de tanque pulmão (surge tank), recebendo uma vazão
flutuante e fornecendo para os próximos equipamentos (a jusante) uma vazão mais estável
para não comprometer sua operação.
Através da figura 16 nota-se que o separador trifásico é constituído de duas câmaras,
chamadas de câmara de separação e câmara de óleo e possui uma vazão de entrada e três de
saída (de água, de óleo e de gás). As principais variáveis a serem controladas neste tipo de
equipamento estão associadas ao seu inventário, sendo o nível de óleo na câmara de óleo, o
nível de água e total na câmara de separação e a pressão do gás.
A fase oleosa verte para a câmara de óleo, onde o nível é controlado manipulando-se a
sua vazão de saída. O controle de pressão atua sobre a vazão de saída de gás. A separação
promovida pelo separador gravitacional trifásico não é completa. Em termos dessa separação,
a função deste equipamento é somente manter dentro de limites toleráveis as seguintes
quantidades:
Líquido arrastado no gás;
Água arrastada no óleo (BSW);
Óleo arrastado na água (TOG).
2.2.5 Problemas operacionais nos vasos separadores
A separação nos vasos bifásicos e trifásicos possuem alguns problemas operacionais
comuns, destacando-se:
Formação de Espuma:
A formação de espuma ocorre devido às características físico-químicas do óleo, das
impurezas presentes e da queda de pressão imposta à mistura gás-líquido no escoamento e na
entrada do separador. Quando presente, a espuma dificulta o controle de nível do líquido
dentro do separador, pois ocupa um volume que poderia estar disponível para a coleta de
líquido, podendo ser arrastada pela corrente de gás ou de óleo desgaseificado. Portanto
quando for possível prever a formação de espuma, o separador deve ser equipado com
31
dispositivo interno para removê-la, assegurando um tempo e superfície coalescedora
suficientes para quebra-la (THOMAS, 2004).
Obstrução por parafinas:
Operações de separação podem ser afetadas por acumulo de parafina. As placas
coalescedoras na seção líquida e os extratores de névoa na seção gasosa são particularmente
susceptíveis a estas obstruções. Quando a parafina é um problema real ou potencial, extratores
alternativos devem ser considerados e bocas de visitas de orifícios devem ser providenciadas
para permitir a entrada de vapor ou solvente de limpeza dos elementos internos do separador
(THOMAS, 2004).
Areia e sedimentos:
A areia e os sedimentos que eventualmente chegam com o líquido no separador
causa a erosão nas válvulas, obstrução nos elementos internos do vaso e redução do tempo de
residência do líquido devido ao acúmulo no fundo do separador. Quando o vaso não possui
dispositivos internos para remoção da areia e dos sedimentos, é necessário interromper a
produção, para realizar a limpeza dos separadores (BRASIL et al., 2011).
Emulsões:
Formadas na interface óleo/água, podem ser problemáticas na operação de um
separador, além de causar problemas com o controle de nível, o acumulo de emulsão diminui
o tempo de retenção efetivo, resultando em uma redução na eficiência do processo. A adição
de calor ou de produtos químicos minimiza a formação de emulsão, porém esses
procedimentos são preferencialmente aplicados na fase de tratamento do óleo (BRASIL et al.,
2011).
Arraste:
Trata-se de um problema operacional típico. O arraste de óleo pela corrente de gás
ocorre quando o nível do líquido está muito alto, Quando existe algum dano em algum
componente interno, formação de espuma, saída de líquido obstruída, projeto impróprio ou
simplesmente porque o vaso esta operando com produção superior ao do projeto. O arraste de
gás pelo líquido pode ser um indicativo de nível muito baixo de líquido ou falha no sistema de
controle de nível (THOMAS, 2004).
32
2.3. Controladores
Automatizar e controlar um processo significa atuar sobre ele ou sobre condições, as
quais o processo está sujeito, de modo a manter variáveis e quantidades estáveis com o passar
do tempo, mesmo que interferências externas tentem desviá-lo desta condição (BAYER e
ARAUJO, 2011).
O controle manual não permite a eliminação do erro, resultando em uma amplitude de
variação excessiva do valor da variável que se deseja controlar. Em contrapartida a este tipo
de controle, surge então o controle automático que é bem mais eficiente.
A regulação e o controle automático de sistemas industriais desempenha um papel de
vital importância no desenvolvimento da ciência e da engenharia. Para além de possuir uma
importância fundamental nos sistemas de pilotagem de navios, aviões, mísseis, veículos
espaciais, etc. Passaram a tornar-se uma parte integrante do funcionamento de processos
industriais típicos (manufatura, produção de energia, produtos químicos, transportes,
instalações de frio e ar condicionado, etc.).
Dentre as diversas demandas para controle automático de processos está o controle de
pressão, temperatura, umidade, viscosidade e ainda operação e montagem de partes mecânicas
das indústrias de fabricação.
Podemos citar como objetivos operacionais do controle dos processos industriais
(BAYER e ARAUJO, 2011).
• Adaptação a perturbações externas;
• Adaptação às restrições dos equipamentos e materiais;
• Aumento da estabilidade operacional;
• Atendimento da especificação do produto;
• Otimização do uso de recursos e matéria-prima;
• Melhora nos resultados econômicos do processo;
• Segurança operacional e pessoal;
• Redução do impacto ambiental.
No princípio da era industrial o operário procurava atingir os objetivos citados através
de controles manuais em instrumentos como manômetro, termômetro e válvulas. Isso era
suficiente devido à simplicidade dos processos. Com o passar do tempo, os mesmos tornaramse mais sofisticados, exigindo a automação através de instrumentos de medição e controle.
Com isso, os operadores puderam se liberar da atuação física direta no processo.
33
Simultaneamente, ocorreu a centralização das atividades em uma única sala de
monitoramento e controle de processos.
Todos esses controles compartilham das mesmas estratégias básicas, que são duas:
controle realimentado (feedback) e controle antecipatório (feedforward). Ou ainda, uma
terceira que é a combinação das duas estratégias de controle para resolver problemas de
estabilidade (BAYER e ARAUJO, 2011).
Na grande maioria dos casos é utilizada a estratégia de controle realimentado. Nesse
caso, o valor de uma variável controlada é medido com um sensor e comparado ao valor de
referência (setpoint). A diferença encontrada entre o setpoint e a variável controlada
determina um erro ou desvio e é utilizada na definição da saída do controlador para ajustar
uma variável manipulada (BAYER e ARAUJO, 2011).
Uma desvantagem do controle realimentado reside no fato de ele atuar somente após
detectar um erro entre o valor da variável controlada e o setpoint. Idealmente seria melhor
evitar que erros ocorressem. O controle antecipatório é baseado nesta filosofia.
Existe a possibilidade de modificar uma variável manipulada para prevenir, ou pelo
menos minimizar, erros surgidos na variável controlada sempre que houver uma forma de
predizer variações de carga e de seus efeitos. Em qualquer controle antecipatório é necessário
definir um modelo matemático que descreva adequadamente o processo e que leve em conta a
relação entre as variáveis de carga e os respectivos efeitos na variável controlada (BAYER e
ARAUJO, 2011).
Uma desvantagem do controle antecipatório é o fato deste não efetuar medições na
variável controlada, dependendo exclusivamente da precisão da relação dos valores
estabelecidos entre o setpoint e a variável manipulada. Uma forma de superar as desvantagens
é a combinação das duas estratégias de controle (BAYER e ARAUJO, 2011).
Existe uma enorme gama de controladores comerciais no mercado, cada uma com suas
vantagens e desvantagens em relação a sua função. Onde os principais tipos de ações básicas
de controle são a Ação liga-desliga (on-off), Ação proporcional (P), Ação integral (I),Ação
derivativa (D) ou a Ação proporcional integral derivativa (PID) onde essas ações podem ser
utilizadas isoladamente ou associadas (BAYER e ARAUJO, 2011).
2.3.1 Ação liga-desliga (on-off)
34
Em muitos sistemas básicos o controle pode ser efetuado a partir de uma simples
chave liga-desliga que é acionada/desacionada, por exemplo, a partir de uma determinada
temperatura ou nível do reservatório. Nesse tipo de ação, o controlador compara o sinal de
entrada com a realimentação e, se a saída superar a entrada, desliga o atuador; se a
realimentação for menor, liga o atuador (BAYER e ARAUJO, 2011). A diferença entre o sinal
de entrada com o sinal da realimentação é chamado de erro, e na área de controle o que se
deseja é fazer com que esse erro seja nulo, porém, para isto acontecer deve-se ter uma boa
malha de controle com parâmetros bem determinados.
Esta é a ação de controle mais básica e, geralmente, o controlador é modelado por um
relé, conforme o diagrama de blocos representado na Figura 18.
Figura 18- Diagrama de blocos de um controlador liga-desliga.
Fonte: CTISM
2.3.2 Ação proporcional
A ação proporcional de controle pode ser considerada uma evolução do modo de
controle liga-desliga. Esse tipo de ação atua conforme o valor do erro. Na ação liga-desliga,
quando a variável controlada se desvia do setpoint, o controle oscila com um sinal brusco de
liga (on) para desliga (off). O controle proporcional foi desenvolvido para evitar essa
oscilação e para produzir uma ação corretiva proporcional ao valor do desvio (BAYER e
ARAUJO, 2011). Para um melhor entendimento, a Figura 19 apresenta a resposta da ação
proporcional em malha aberta, quando é aplicado um desvio em degrau no controlador.
Figura 19: Resposta da ação proporcional em malha aberta
Fonte: CTISM
35
Observe que existe um sinal inicial do controlador mesmo com desvio zero cuja
finalidade é a de manter a variável controlada no valor desejado (setpoint). Quando ocorre um
desvio repentino no valor da variável controlada (sinal degrau) o sinal de controle varia
proporcionalmente ao desvio, ou seja, de acordo com o ganho (BAYER e ARAUJO, 2011).
Embora a ação proporcional elimine as oscilações no processo do controle liga-desliga
em malha fechada, não é possível eliminar o erro de off-set, visto que após um distúrbio
qualquer no processo persiste uma diferença entre o setpoint e o valor medido.
A principal vantagem deste controlador é a eliminação das oscilações provocadas pelo
controle liga-desliga devido à correção proporcional ao desvio. Uma desvantagem é o
aparecimento do erro de off-set sempre que ocorrer variação de carga. Esta ação é
especialmente útil quando grandes variações de carga no processo são improváveis e podemse tolerar pequenos erros de off-set. O controlador também é útil em processos com tempo
morto pequeno no qual o ganho do controle pode ser alto (faixa proporcional pequena) para
gerar um menor erro de off-set (BAYER e ARAUJO, 2011).
2.3.3
Ação integral
Uma forma de eliminar o erro de off-set da ação proporcional é reajustar o valor do
setpoint. A ação integral atua no processo ao longo do tempo enquanto a diferença entre o
valor desejado (setpoint) e o valor mensurado persistir. Diferentemente da ação proporcional
que corrige os erros instantaneamente, o sinal de correção age de forma lenta até eliminar por
completo o off-set. Quanto mais tempo o desvio perdurar, maior será a saída do controlador.
A ação integral não é, isoladamente, uma técnica de controle, pois não pode ser
empregada estando separada de uma ação proporcional.
A ação integral corrige o valor da variável manipulada em intervalos regulares,
somando a esta o valor do desvio em relação ao setpoint. Este intervalo de atuação se chama
tempo integral, que pode também ser expresso por seu inverso, chamado ganho integral ou
taxa integral. Matematicamente, a relação é expressa por:
Ti = 1/Ki
(2.1)
Onde Ti é o tempo integral e o Ki é o ganho integral. A ação integral tem como único
objetivo eliminar o erro de off-set em regime permanente, e a adoção de um tempo integral
excessivamente longo pode levar o processo à instabilidade. Por sua vez, a adoção de um
36
tempo integral curto retarda em demasia a estabilização. Quanto maior o desvio, maior será
velocidade de correção. No entanto, como também depende do tempo, a resposta é lenta e, por
isso, desvios grandes em curtos espaços de tempo não são devidamente corrigidos. Dá-se,
portanto a necessidade de associar esta ação a ação proporcional.
2.3.4 Ação derivativa
A ação derivativa não é, isoladamente, uma técnica de controle, pois não pode ser
empregada separadamente de uma ação proporcional. A ação derivativa atua na variável
manipulada proporcionalmente à velocidade de variação do desvio. O objetivo é diminuir a
velocidade das variações de variável controlada, evitando que se eleve ou se abaixe muito
rapidamente. O princípio básico reside em proporcionar uma correção antecipada do desvio,
isto é, na presença de uma tendência súbita de aumento no desvio, a ação derivativa atua de
forma preventiva, diminuindo o tempo de resposta.
A ação derivativa calcula, a intervalos regulares, a variação do desvio do processo,
somando o valor desta variação à variável manipulada. A intensidade da ação é ajustada
variando-se o intervalo de cálculo da diferença. Este parâmetro é chamado tempo derivativo
ou ganho derivativo. Quando o tempo derivativo aumenta, a velocidade de variação da
variável controlada é reduzida. A Figura 20 apresenta gráficos que exemplificam o
comportamento característico da ação derivativa no controle (BAYER e ARAUJO, 2011).
Figura 20 - Comportamento ação derivativa
Fonte: CTISM
onde VC é a variável controlada e VM é a variável manipulada.
37
Quando ocorre uma variação em degrau, a velocidade de variação é praticamente
instantânea. Nesse caso, a ação derivativa que é proporcional à velocidade desvio, causa
mudança súbita na variável manipulada. A Figura 21 mostra a resposta da ação derivativa
para essa situação.
Figura 21 - Resposta da ação derivativa a uma variação do tipo degrau
Fonte: CTISM
A figura 21 mostra que a ação derivativa não deve ser utilizada em processos com
resposta rápida e, da mesma forma, não pode ser utilizada em processos que apresentem
ruídos no sinal de medição, pois a ação derivativa provoca mudanças súbitas na saída do
controle, podendo levar o processo à instabilidade.
A ação derivativa é apropriada para processos que possuem grandes constantes de
tempo, processos lentos. Porém, a ação derivativa é sensível ao ruído do sinal de medição,
sensível às mudanças rápidas na entrada e no setpoint. Deve-se escolher o controlador com
ação derivativa baseado na variação da variável do processo e não no erro. Além disso, a
sintonia deste controlador é mais complicada.
2.3.5
Ação Proporcional Integral Derivativa
A combinação das ações proporcional, integral e derivativa para gerar um só sinal de
controle dá origem ao que denominamos de controlador proporcional-integral-derivativo ou
simplesmente PID, como é mais comumente conhecido. Os controladores PID são largamente
utilizados, uma vez que são capazes de solucionar a grande maioria dos problemas de controle
que surgem em processos industriais. Essa expressiva utilização deve-se ao fato desse
38
controlador ser de fácil implementação, baixo custo e versátil na capacidade de estabilizar os
comportamentos transitórios e de regime permanente dos processos sob controle.
Devemos utilizar a ação PID quando desejamos rapidez na correção do erro com
ausência de off-set, aliado a um desvio máximo reduzido. No entanto, a combinação dessas
três ações nem sempre é a melhor opção. Por exemplo, no caso de controle de vazão,
podemos utilizar somente o modo proporcional e integral, uma vez que associar o modo
derivativo em vazão não é vantajoso. O modo derivativo é adicionado normalmente no
controle de temperatura por ser considerado uma variável de reação lenta.
A Figura 22 apresenta uma comparação das respostas do comportamento típico de um
sistema controlado após a introdução de uma perturbação externa em degrau. O controlador
proporcional torna a resposta mais rápida e reduz o erro. A adição da ação integral elimina o
erro estacionário, mas tende a fazer com que a resposta se torne mais oscilatória. Quando é
introduzida a ação derivativa e considera-se a resposta da ação, ocorre a redução tanto da
intensidade das oscilações, como do tempo de resposta.
Figura 22: Comparação das ações dos controladores P, I, D e PID.
Fonte: CTISM.
39
3
METODOLOGIA
3.1 Modelagem
Um modelo é qualquer objeto, concreto ou abstrato, utilizado para explicar algum tipo
de fenômeno. Matematicamente, obtém-se um modelo quando se torna possível estabelecer
relações quantitativas entre as variáveis do problema apresentado. Então, modelagem, é a
forma de identificar qualitativamente e, principalmente, quantitativamente o processo
estudado, a fim de se obter explicações a respeito das características do sistema, fazendo-se
algumas considerações – hipóteses básicas - para necessárias simplificações. (PINTO e
LAGE, 2001).
O separador trifásico foi modelado, simplificadamente, baseado no balanço de massa
de óleo, água e gás nos compartimentos do separador (CS e CL). A Figura 23 exibe o
separador trifásico controlado por três controladores atuando nas válvulas de saída de água,
óleo e gás; bem como, alguns dos símbolos utilizados na modelagem dinâmica, onde CS é a
câmara de separação e CL é a câmara de óleo.
Figura 23 – Separador trifásico e suas variáveis
Fonte: Pinto (2009)
A descrição das abreviaturas e suas malhas da figura 22 estão descritas abaixo:
a) Malha de controle da pressão (saída da pressão):
Sensor/transmissor da pressão (PT)
40
Controlador e indicador da pressão (PIC);
Transdutor que convertem sinais de entrada e corrente em uma saída
pneumática diretamente proporcional. (I/P).
b) Malha de controle do nível (saída do óleo)
Sensor/transmissor do óleo (LT);
Controlador e indicador do óleo (LIC);
Transdutor que convertem sinais de entrada e corrente em uma saída
pneumática diretamente proporcional. (I/P).
c) Malha de controle do nível da interface (saída da água)
Sensor/transmissor do nível da interface (LT);
Controlador e indicador do nível da interface óleo/água (LIC);
Transdutor que convertem sinais de entrada e corrente em uma saída
pneumática diretamente proporcional. (I/P).
Lin, Win, Gin e Pi são respectivamente a vazão de óleo, a vazão de água, a vazão de gás
e a pressão da entrada. LO, WO, GO e PO são respectivamente a vazão de óleo, a vazão de
água, a vazão de gás e a pressão de saída;
PL, PW e PG, são respectivamente as pressões de descarga do óleo, da água e do gás;
P é a pressão do separador;
CCS e CCL são respectivamente o comprimento da câmara de separação e o
comprimento da câmara de óleo;
LV é o nível de óleo na câmara de óleo e D é o diâmetro do separador trifásico;
As equações diferenciais foram encontradas efetuando-se balanços de massas na
câmara de separação e na câmara de óleo, as equações são mostradas a seguir:
3.1.1 Área de Segmentos Circulares
Primeiramente aproxima-se a geometria do separador a um cilindro perfeito, onde a
área de seguimentos circulares é dada pela Equação 3.1, pois com esta equação é possível
encontrar a relação entre o volume e a altura.
41
(
(
)
)√ (
)
(
)
Onde S é a Área da seção circular, D é o Diâmetro e h é a Altura do nível (PINTO, 2009).
3.1.2 Volume de Cilindro de Segmento Circular
O volume do cilindro ocupado por líquido é dado pela Equação 3.2, que é uma relação
linear entre o volume, VL(t), e a altura, hL(t), do separador trifásico.
{
Onde
(
(
)
)√ (
)
}
(
)
é o volume total do cilindro, h á altura do nível e D o diâmetro do separador
(PINTO, 2009).
E derivando a equação do volume em relação à altura, encontra-se a derivada a
temporal do volume do cilindro de segmento circular é dada pela Equação 3.3.
√ (
)
(
)
(dV/dt) é a diferencial do volume, h é o nível e (dh/dt) e diferencial do nível e C comprimento
da câmara.
3.1.3 Balanço de Líquido em CS
Então se aplica um balanço no compartimento da camâra de separação (CS). E é
possível obter a relação da altura de líquido (água + óleo) em CS no separador com o tempo
mostrada na equação 3.4.
( )
( )
( )
√ ( )(
( )
( )
( ))
(
)
42
(dht(t)/dt) é a diferencial do nível total, Li (t), Wi (t) são o nível de entrada de óleo e água
variando com o tempo, LV(t) e WO (t) são respectivamente o nível de óleo que verte e o nível
de água variando com o tempo, e hT(t) é o nível total variando no tempo (PINTO, 2009).
3.1.4 Balanço de Óleo em CL
Na câmara de óleo (CL), nas condições normais de operação, o único líquido existente
será o óleo, por isso para este compartimento é feito um balanço somente na câmara de óleo.
A relação da altura de óleo na câmara de óleo com o tempo é mostrada na equação 3.5, onde
se deve atentar ao fato da altura de líquido do compartimento C L não poder ser maior que a
altura de líquido do compartimento da câmara de separação (CS), assim:
( )
( )
√
( )
( )(
( ))
(
)
(dhL(t)/dt) é a diferencial do nível de óleo, hL(t) é o nível total variando no tempo,
( )
( ) são respectivamente a vazão de óleo que verte e a vazão de óleo de saída
variando no tempo.
3.1.5 Balanço de Água em CS
A equação 3.6 é obtida da mesma como foi realizado nas seções 3.13 e 3.1.4, ficando
assim com:
( )
( )
√
( )(
( )
( ))
(
)
(dhW(t)/dt) é a diferencial do nível de água, hW(t) é o nível de água variando no tempo,
( )
( ) são respectivamente a vazão de água de entrada e a vazão de água de saída
variando no tempo
3.1.6 Balanço de Gás no Tanque
Para a fase gasosa do separador foi modelada de forma ideal, onde o número de moles
de gás é dado pela equação de Clapeyron.
43
(
nG é o número de mols total do gás,
)
são o volume total do separador, o volume da
câmara de separação e o volume da câmara de óleo respectivamente. R é a constante universal
dos gases, T é a temperatura e P é a pressão total do separador. Gi e Go, correspondem a
vazão de entrada do gás e Go corresponde a vazão de saída de gás variando no tempo.
(
)
(
)
(
)
A vazão molar de gás de entrada e saída é apresentada, respectivamente, pelas
Equações 3.7 e 3.8.
̇
̇
̇
̇
(
)
(
)
(
)
(
)
Para o balanço de gás, tem-se:
̇
̇
Depois substitui as equações 3.9 e 3.10 na equação 3.11:
(
)
E calculando dnG/dt através da equação 3.7:
(
)
(dnG/dt)
(
)
(dVCS/dt), é a diferencial do volume na
câmara de separação e (dVCL/dt) é a diferencial do volume na câmara de óleo.
O comportamento dinâmico da pressão no separador é dado pela Equação 3.14 ao
igualar-se as Equações 3.12 e 3.13.
44
( )( ( )
( )
( )
( )
( )
( )
( )
( )
( ))
(
)
(dP(t)/dt) é diferencial da pressão, P(t) é a pressão total do separador que varia no tempo,
( )
( )
( ) são as vazões de entrada de óleo, águe e gás variando no tempo
( )
respectivamente, e
( )
( ) são as vazões de saída da vazão de óleo, de água e de
gás variando no tempo.
3.1.7 Cálculo dos Volumes
O cálculo dos volumes de líquidos (óleo, água e óleo + água), nas câmaras de
separação e de óleo CS e CL. A Equação 3.15 representa o volume de líquido (óleo + água) no
segmento CS, a Equação 3.16 representa o volume de óleo no segmento CL.
Volume de líquido no compartimento CS:
{( )
( )=
Onde
(
( )
)
(
( ))√
( )(
( ))}
(3.15)
( ) é o volume da câmara variando no tempo, CCS é o comprimento da câmara
de separação, D é diâmetro do separador e hw(t) e nível de água variando no tempo. E
hw (t) é o nível de água.
()
Onde
{(
)
(
()
)
(
( ))√ (
( ))}
(
)
( ) é o volume da câmara de óleo variando no tempo, CCL é o comprimento da
câmara óleo, D é o diâmetro do separador e hw(t) e nível de água variando no tempo.
Volume de água no compartimento CS:
{(
)
(
()
)
(
( ))√
( )(
( ))}
(
)
O óleo que verte através do vertedouro, é dado pela relação de Francis para vertedouro
retangular, mostrada na equação 3.18 (Equação de Francis, PERRY e CHILTON, 1980).
45
()
( ( )
(
√
))( ( )
)
⁄
(
)
LV(t) é a vazão óleo que varia no tempo, ela é dependente de g que é a aceleração da
gravidade, hvert é a altura do vetedouro líquido que transborda para câmara de separação. E
ht(t) é o nível total variando no tempo.
√
(
)
(
)
3.1.8 Vazões de Saída
As válvulas de saída de óleo, água e gás foram modeladas como válvulas de
escoamento (PERRY, 1984). As Equações 3.20, 3.21 e 3.22 representam as vazões de saída
de óleo, água e gás respectivamente.
( )
( )√
( )
( )
(
)
Onde LO(t) é a vazão de saída do óleo variando no tempo, CVMAXL é a constante da válvula
para o óleo, e xL(t) é a fração de abertura da válvula de óleo.
()
( )√ ( )
(
)
Onde WO(t) é a vazão de saída da água variando no tempo, CVMAXW é a constante da válvula
para o água, e xW(t) é a fração de abertura da válvula de água.
Onde:
()
( ( )
( ))
é a densidade de água e hw é a altura da água,
água.
()
( ( )
√
()
é densidade do óleo e ht é a altura da
)( ( )
()
) ( )
(
Onde GO(t) é a vazão de saída do gás variando no tempo, CVMAXG é a constante da válvula
para o gás, e xG(t) é a fração de abertura da válvula de gás.
46
3.2 Funções de transferência
Utilizando as equações diferenciais ordinárias (EDO) não lineares obtidas no tópico
3.1, foi necessário fazer à linearização dessas equações para poder aplicara a transformada de
Laplace. Foram obtidas as funções de transferência para o nível total, nível de água, nível de
óleo e pressão, estas são as funções que foram utilizadas para simulação no Simulink, as
funções de transferências são mostradas abaixo:
3.2.1 Funções de transferência do nível total na câmara de separação
(
)
(
)
(
)
(
)
(
)
(
)
(
)
3.2.2 Funções de transferência do nível água na câmara de separação
(
)
(
(
)
)
(
(
)
)
3.2.3 Funções de transferência do nível óleo na câmara de óleo
(
)
(
)
(
)
3.2.4 Funções de transferência da pressão no separador trifásico
(
(
)
)
(
(
(
)
(
)
)
)
(
)
(
)
(
)
(
)
47
4
RESULTADOS E DISCUSSÕES
Primeiramente foram realizadas simulações do processo em malha aberta, ou seja, o
sistema sem atuação do controle, com o intuito de verificar o comportamento das variáveis
controladas, que são o nível de água e nível total na câmara de separação, o nível de óleo
câmara de óleo e a pressão no separador.
4.1. Teste em malha aberta
O objetivo é manter os valores dessas variáveis controlados dentro da faixa de valores
mostrados na tabela 3, esta tabela é válida somente para a análise do processo em malha
aberta:
Tabela 1- Faixa de valores das variáveis controladas somente para o processo em malha aberta.
Variáveis Controladas
Faixa dos valores
Pressão (P)
7 < P <9 (bar)
Nível total (NT)
1<NT< 2
Nível de água (NA)
0.2 <NA< 0.8
Nível de óleo (NO)
0.5 <NO< 1.4
Fonte: Elaboração própria.
A simulação foi realizada no programa matlab, e os resultados em malha aberta são
mostrados nos gráficos a seguir. Foram realizadas perturbações degrau de (+)10%, alterando o
valor de referencia das variáveis em questão e observando suas respostas. A figura 12 mostra
os resultados para as variáveis de interesse. Como pode ser observado, todas as variáveis de
interesse não alcançam o estado estacionário, isto por que a simulação do processo em malha
aberta leva o separador a níveis extremos. Para deter o aumento da variável, uma malha de
controle por estratégia à realimentação foi proposta, e será visto na seção 4.2, evitando assim
que o processo não atingisse valores incoerentes, como por exemplo, o transbordamento do
separado, pois como observado na figura 24, os valores dos níveis de água, óleo e total em um
48
determinado instante de tempo atingiram valores bem superiores à faixa de valores das
variáveis controladas da tabela 3.
Figura 24- Simulação do processo em malha aberta.
Fonte: Elaboração Própria.
4.2. Teste em malha fechada.
Após os testes de malha aberta, foram realizados os testes de malha fechada. A
estratégia de controle utilizada serviu para evitar o colapso do separador e controlar todas as
variáveis desejadas, pois em malha aberta não foi obtido nenhum sucesso. Os parâmetros do
separador trifásico utilizados na simulação encontram-se na Tabela 4 abaixo. O separador
trifásico, inicialmente, estava pressurizado a 8 bar possuindo uma altura de água de 0,5 m e
1.5 m de líquido na câmara de separação e 1 m de óleo na câmara de óleo.
49
Tabela 2- Parâmetros operacionais do separador trifásico.
Parâmetro
Valor
Diâmetro (m)
3
Comprimento (CS) (m)
5
Comprimento (CL) (m)
3
Altura do Vertedouro (m)
1.2
Pressão de Descarga de Óleo (bar)
6
Pressão de Descarga de Gás (bar)
6
Pressão de Descarga de Água (bar)
6
CVMAXL
1025
CVMAXW
410
CVMAXG
120
Temperatura do Separador (K)
303.15
Massa Molecular do Ar (kg/gmol)
0.02897
Massa Molecular do Gás (kg/gmol)
0.021
Densidade do Óleo (kg/m3)
850
Densidade da Água (kg/m3)
999.19
Fonte: Elaboração própria
Utilizando as equações diferenciais ordinárias (EDO) lineares e não lineares obtidas
no capítulo 3 foram realizadas as simulações. Para as EDO’s lineares foi aplicada a
transformada de Laplace, para as EDO’s não lineares, foi feita primeiro a linearização e em
seguida aplicada a transformada de Laplace. Obtidas as funções de transferência, as
simulações foram efetuadas. Foram realizadas perturbações degraus de (+)10%, (-)10%,
(+)80% e (-)15%, alterando o valor de referencia das variáveis em questão e observando suas
respostas. Para realizar a simulação do controle de processos, utilizou-se o Simulink, uma
ferramenta do matlab.
Como foi possível encontrar as funções de transferências, então utilizando o Simulink,
aplicativo do matlab, o processo foi simulado e controlado com o intuito de manter as
50
variáveis de referências com os valores desejados. O Simulink trabalha com diagrama de
blocos, onde as funções de transferências são escritas e uma estratégia de controle é proposta,
nas simulações abaixo a estratégia é por realimentação e também é importante ajustar os
parâmetros no Simulink dos ganhos proporcional e integral. Foram construídas quatro malhas
de controle com objetivo de controlar o nível de óleo na câmara de óleo, o nível total e o nível
de água na câmara de separação e a pressão total do separador.
Primeiramente foi construída a malha de controle do nível de água, nota-se que o nível
de água em função do tempo depende de cinco variáveis.
Figura 25: Controle do nível de água em função de cinco variáveis utilizando diagrama de blocos no Simulink.
Fonte: Elaboração própria.
Em seguida foi construída a malha de controle do nível total, as funções de
transferência foram obtidas também através do processo de linearização. Pode-se observar
que a variável nível total é função de sete variáveis.
51
Figura 26: Controle do nível total em função de sete variáveis utilizando diagrama de blocos no Simulink.
Fonte: Elaboração própria.
A malha de controle do nível de óleo na câmara de óleo foi construída no Simulink, o
nível de óleo está função de três variáveis.
Figura 27: Controle do nível de óleo em função de três variáveis utilizando diagrama de blocos no Simulink.
Fonte: Elaboração própria.
Por fim, a malha de controle da pressão que foi construída no Simulink, está em
função de 10 variáveis.
52
Figura 28: Controle da pressão em função de 10 variáveis utilizando diagrama de blocos no Simulink.
Fonte: Elaboração própria.
Um controlador proporcional integral (PI) foi implementado como visto nas figuras
acima, o tempo de simulação utilizado foi 200 segundos, tempo suficiente para que o sistema
alcançasse o estado estacionário. Os gráficos a seguir mostram os resultados obtidos. Uma
perturbação no valor de referência (ht =1.5m) do nível total de +10% foi realizada.
A figura 29 mostra que o controlador agiu de forma eficiente. A partir do estado
estacionário a perturbação degrau foi efetuada no tempo de 100 segundos e no tempo de 112
segundos o novo estado estacionário foi alcançado, obtendo um novo valor do nível total de
1.75m, sendo assim, o controle para o nível total na câmara de separação foi bem satisfatório.
Figura 29: Gráfico de nível total x tempo para a perturbação degrau de +10%.
Fonte: Elaboração própria.
53
Uma perturbação no valor de referência (hw = 0.5m) do nível de água de +10% foi
realizada. A figura 30 mostra a resposta do controlador, o controlador agiu de forma eficiente,
alcançando o estado estacionário e logo após sofre a perturbação. A perturbação degrau foi
efetuada no tempo de 100 segundos e no tempo de 110 segundos um novo estado estacionário
foi alcançado, obtendo um novo valor do nível água de 0.55m, sendo assim, o controle para o
nível óleo na câmara de separação foi atingido com sucesso.
Figura 30- Gráfico de nível água x tempo para uma perturbação de +10%.
Fonte: Elaboração própria.
Uma perturbação no valor de referência (ho = 1.0m) do nível de óleo de +10% foi
realizada, como mostra a figura 31. A perturbação degrau foi efetuada também no tempo de
100 segundos e no tempo de 104 segundos o novo estado estacionário foi alcançado, obtendo
um novo valor do nível óleo de 1.3m, sendo assim, o controle para o nível óleo na câmara de
óleo foi bem satisfatório.
Figura 31: Gráfico de nível óleo x tempo para uma perturbação de +10%.
Fonte: Elaboração própria.
54
Para a pressão, foi realizada uma perturbação de (P = 8bar) da pressão de +10% foi
realizada. A partir do estado estacionário a perturbação degrau foi efetuada no tempo de 100
segundos e rapidamente o estado estacionário foi alcançado, obtendo um novo valor da
pressão de 8.8 bar, sendo assim, o controle para a pressão no separador trifásico foi atingido
com sucesso.
Figura 32- Gráfico de Pressão x tempo para uma perturbação de +10%.
Fonte: Elaboração própria
Foi realizada uma perturbação degrau de -10% nas variáveis controladas com intuito
de comparar com os resultados do comportamento dos níveis e da pressão para uma
perturbação degrau de +10%, os gráficos para uma perturbação degrau de -10% são
mostrados a seguir: Uma perturbação no valor de referência (hw =0.5m) do nível de água de 10% foi realizada. A figura 33 mostra o comportamento da curva no gráfico. A partir do
estado estacionário a perturbação degrau foi efetuada no tempo de 100 segundos e no tempo
de 112 segundos o novo estado estacionário foi alcançado, obtendo um novo valor do nível
total de 0.45m, sendo assim, o controle para o nível total na câmara de separação foi bem
satisfatório.
Figura 33: Gráfico do Nível de Agua x tempo para uma perturbação degrau de -10%.
Fonte: Elaboração própria.
55
Uma perturbação no valor de referência (ht =1.5m) do nível total de -10% foi
realizada. A figura 34 mostra que o controlador PI (Proporcional Integral) realizou o controle
em tempo muito curto isto porque os parâmetros estavam muito bem ajustados, então a partir
do estado estacionário a perturbação degrau foi efetuada no tempo de 100 segundos e no
tempo de 114 segundos o novo estado estacionário foi alcançado, e novo valor do nível total
obtido para esta perturbação negativa foi de 1.35m, o controle para o nível total na câmara de
separação foi bem satisfatório.
Figura 34: Gráfico do Nível total x tempo para uma total perturbação degrau de -10% no nível.
Fonte: Elaboração própria.
Uma perturbação no valor de referência (ht =1.5m) do nível total de -10% foi
realizada. Então a partir do estado estacionário a perturbação degrau foi efetuada no tempo de
100 segundos e no tempo de 112 segundos o novo estado estacionário foi alcançado, e novo
valor do nível óleo obtido para esta perturbação negativa foi de 0.9m.
Figura 35: Gráfico do Nível de Óleo x tempo para uma perturbação degrau de -10% no nível de óleo.
Fonte: Elaboração própria.
56
Uma perturbação no valor de referência (P = 8 bar)) da pressão de -10% foi realizada.
Na pressão, a figura 36 mostra que o controlador PI (Proporcional Integral) realizou o
controle em tempo muito curto, quando o estado estacionário foi alcançado fez-se uma
perturbação no tempo de 100 segundos e no tempo de 110 segundos o novo estado
estacionário foi alcançado, e novo valor do nível óleo obtido para esta perturbação negativa
foi de 0.92m.
Figura 36: Gráfico da pressão x tempo para uma perturbação degrau de +10% no valor inicial da pressão.
Fonte: Elaboração própria.
Foi realizada uma perturbação degrau de +80% nas variáveis de entrada, ou seja, na
iminência do separador transbordar e nessa situação mais gotículas de líquidos são arrastadas
pelo gás, com o objetivo de analisar o comportamento das variáveis de controle em situações
extremas, pois nesta situação os níveis e a pressão estão variando bastante, e o novo valor do
estado estacionário alcançando como pode ser notado nos gráficos acima, foi atingido em um
tempo maior justamente porque a perturbação efetuada foi de 80%, mesmo nessas situações
para um tempo de 200 segundos, o controle foi efetuado de maneira satisfatório.
Então como nos casos anteriores, foi realizada a perturbação no valor de referência
(P = 8 psi) da pressão. Então em comparação com os resultados de +10 e -10%, a perturbação
de +80% teve um tempo de resposta maior, logicamente por está em situações extremas.
Pelo fato do nível da água sofrer uma perturbação maior, de 80%, o tempo de
resposta é mais lento e oscilatório, entretanto, o novo estado estacionário é alcançado
rapidamente, o valor do novo estado estacionário é de 0.9m.
57
Figura 37: Gráfico do Nível de água x tempo para uma perturbação degrau de +80%.
Fonte: Elaboração própria.
A figura 38 mostra o nível total e seu comportamento para uma perturbação de 80%
no seu valor inicial, o tempo de simulação é de 200 segundos, mas o estado estacionário é
alcançado em 14 segundos, o novo valor do estado estacionário é de 2.7m, se o diâmetro do
separador é de 3 metros, então o nível total está bastante elevado.
Figura 38: Gráfico Nível total x tempo para uma perturbação degrau de +80%.
Fonte: Elaboração própria.
O nível de óleo sofre uma perturbação de 80% no seu valor inicial, nota-se que quando
sofre a perturbação no tempo 100 segundos, alcança rapidamente o novo estado estacionário,
58
mas em comparação com a perturbação de +10% e -10% sofre uma oscilação maior até
alcançar o valor 1.8m, verificado na figura abaixo:
Figura 39: Gráfico do Nível de óleo x tempo para uma perturbação degrau de +80%.
Fonte: Elaboração própria.
Para o novo valor da pressão que é 14.5 bar, após sofrer a perturbação de 80%, ela não
alcança o estado estacionário tão rapidamente, leva cerca de 5 segundos para poder alcançar.
Figura 40: Gráfico da pressão x tempo para uma perturbação degrau de +80% no valor inicial da pressão.
Fonte: Elaboração própria.
Foi realizada uma perturbação degrau de -15% nas variáveis de entrada, ou seja, com
os níveis da fase líquida bem reduzida e nessa situação mais gotículas de gás são arrastadas
pela fase líquida. O tempo para as variáveis pressão e níveis alcançarem o estado estacionário
foi bem maior em comparação com as perturbações de (+10%), (-10%) e a de (+80%).
59
Exatamente como os casos anteriores, o tempo de simulação foi de 200 segundos,
tempo necessário para que o novo estado estacionário fosse atingido.
Primeiramente foi realizada a perturbação de -15% no valor inicial do nível de água,
como observado na figura 41, houve uma oscilação bem maior para que o novo estado
estacionário fosse alcançado, no tempo de 112 segundos, o valor do novo estado estacionário
foi de 0.41m.
Figura 41: Gráfico do Nível de água x Tempo para uma perturbação degrau de -15% no nível de água inicial.
Fonte: Elaboração própria.
Na figura abaixo, é observado o comportamento do gráfico nível total x tempo, o novo
estado estacionário foi atingido e este valor para o nível total é de 0.87m.
Figura 42: Gráfico do Nível total x tempo para uma perturbação degrau de -15% no nível total.
Fonte: Elaboração própria.
60
Na figura abaixo, é observado o comportamento do gráfico nível de óleo x tempo, o
novo estado estacionário foi atingido e este valor para o nível de óleo é de 0.85m.
Figura 43: Gráfico do Nível de óleo x tempo para uma perturbação degrau de -15% no nível de óleo.
Fonte: Elaboração própria.
Por fim o controlador PI agiu no controle da pressão para a perturbação negativa de (15%) que foi realizada, e o controle foi alcançado, obtendo um novo valor do estado
estacionário que foi de 6.5 bar, não houve uma variação significativa na perturbação
realizada.
Figura 44: Gráfico da pressão x tempo para uma perturbação degrau de -15% no valor inicial da pressão.
Fonte: Elaboração própria.
Portanto, em todos os casos o controle foi atingido utilizando o controlador
proporcional integral (PI), e o tempo de simulação necessário foi de apenas 200 segundos.
61
5 CONCLUSÃO
Foram feitas as simulações em malha aberta e em malha fechada (com controle), com
o intuito de comparar os resultados das simulações. Foi visto que a simulação em malha
aberta levou o separador trifásico a níveis extremos, causando até o transbordamento do
mesmo, verificando a necessidade de controle, poia nenhuma variável desejada alcançou o
estado estacionário.
E utilizando um controlador proporcional integral (PI), o controle foi muito eficiente
atingindo resultados bastante satisfatórios porque para os quatro tipos de perturbações
realizadas, o controlador atingiu os valores desejados em todas. As perturbações com os
níveis muito elevados (a de +80%) e com o nível muito baixo (a de -15%) que são situações
extremas oscilaram mais que as de perturbação de (+10%) e (-10%), pelo valor da
perturbação ser mais elevado, mas, no entanto o controle foi observado.
O que mostra que o controlador PI pode ser empregado em controle de níveis e
pressão, pois controla em um tempo mínimo se ajustado os parâmetros da forma correta.
A modelagem e simulação realizada foram de grande importância no estudo do
separador trifásico. Primeiramente o modelo fenomenológico construído acrescentou
conhecimento das relações de hidráulica e de controle do separador além da parte matemática
da construção do modelo, onde linearizações de equações foram necessárias para obtenção do
modelo final no Simulink. Na simulação pôde ser observada a dinâmica de funcionamento do
separador, os limites de segurança do equipamento e a sua eficiência após a implementação
do sistema de controle. Foi também observada a função do separador trifásico como um vaso
absorvedor de flutuações no processo de separação, onde alterações frequentes na vazão de
produção de petróleo são verificadas e necessitam serem absorvidas no processo.
62
REFERÊNCIAS
ASSKILDT K., HANSSON P. (2000). A New Measuring Sensor for Pump Control in
Subsea Separators. World Pumps, 400, 30-33(4).
BALCHEN, J. G.How have we arrived at the present state pf knowledge in process control?
Is there a lesson to be learned? Journal of Process Control, cap.9, 101-108 (1999).
BAYER. F. M.; ARAUJO. O. C. B. Controle automático de processos. Escola Aberta
Técnica do Brasil. Universidade Federal de Santa Maria. Rio grande do Sul 2011.
BEHIN, J., AGHAJARI, M. Influence of Water Level on Oil-Water Separation by
Residence Time Distribution Curves Investigations, Separation and Purification
Technology, 64, 48-55. (2008).
BISSELL, C. C. Control Engineering. London: Chapman & Hall (1993).
BOLTON, W. Engenharia de Controle. São Paulo: Makron Books do Brasil (1995).
BRASIL, N.I do, ARAÚJO, M.A.S., DE SOUSA, E.C.M. Processamento Primário de
Petróleo e Gás. Rio de Janeiro: LTC, 2011.
DALLAGNOL FILHO, V.A. Identificação de modelos ARMAX e NARMAX para um
poço de petróleo operando por injeção contínua de gás. Dissertação (Mestrado em
Ciências), Dept. Eng. Elétrica, Universidade Federal de Santa Catarina. (2005).
DIEGUEZ, M; ARMANDO, Z. Petróleo e gás natural têm produção recorde em junho
(Demonstrativos Gráficos). 2013. Postado em: 05 de agosto 2013 no blog da coluna.
Disponível em: < http://fmanha.com.br/blogs/blogdacoluna/2013/08/05/petroleo-e-gasnatural-tem-producao-recorde-em-junho/ >. Acesso em: 13 de julho de 2014.
63
G1. Produção de pré-sal iltrapassa 500 mil barris por dia e bate novo recorde. 2014.
Disponível em: < http://g1.globo.com/rio-de-janeiro/noticia/2014/07/producao-do-pre-salultrapassa-500-mil-barris-por-dia-e-bate-novo-recorde.html>. Acesso em: 08 de agosto de
2014.
LUYBEN, W.L. Process Modeling, Simulation and Control for Chemical Engineers. 2nd ed
1990, McGraw-Hill InternationalEditions.
NUNES, G. C.; MEDEIROS, J. L.; ARAÙJO, O. Q. F. Modelagem e Controle na Produção
de Petróleo – Aplicações em Matlab. Editora Edgard Blucher Ltda. 2011.
NUNES, G. C., Modelagem e Simulação Dinâmica de Separador Trifásico Água-ÓleoGás. Dissertação (Mestrado em Ciências), COPPE/UFRJ, Rio de Janeiro – RJ. 1994.
PERRY, R.H., CHILTON, D. (1980), Perry`s Chemical Engineer`s handbook, 6th edition,
MacGraw Hill, 5-19.
PETROBRAS,
2014.
Exploração
e
Produção.
Disponível
em:
<
http://www.petrobras.com.br/pt/nossas-atividades/areas-de-atuacao/exploracao-e-producaode-petroleo-e-gas/>. Acesso em: 08 de Agosto de 2014.
PETROBRAS.
Fatos
e
Dados,
2013.
Disponível
em:
<
http://fatosedados.blogspetrobras.com.br/2013/02/28/producao-no-pre-sal-bate-novo-recordee-alcanca-300-mil-barris-de-petroleo-por-dia/ >. Acessado em: 08 de Agosto de 2014.
PINTO, D.D. Estratégias de Controle contra Intermitência Severa na Alimentação de
Separadores offshore. Dissertação (Mestrado em Ciências) - UFRJ/CT/EG/TPQBq, Rio de
Janeiro – RJ. 2009.
SILVA, S.J.G. Um sistema para estimação da vazão de gás de poços produzindo por
plunger lift para vaso separador de teste em plataformas de petróleo. Dissertação
(Mestrado em Ciências) - Faculdade de Engenharia Elétrica da Universidade Federal do Rio
Grande do Norte, Natal, (2007).
64
SILVEIRA, M.A.C.R. Contole de um Processo de Tratamento Primário de Petróleo,
Dissertação (Mestrado em Ciências) - COPPE, Universidade Federal do Rio de Janeiro – Rio
de Janeiro. (2006).
SIQUEIRA, R.B.N. Estudo sobre Processamento Primário do Petróleo. Monografia
(Graduação em Ciência e Tecnologia) – Faculdade de Ciência e Tecnologia da Universidade
Federal Rural do Semi - Árido – UFERSA – Rio Grande do Norte, (2012).
SOUZA, L. A. Noções de processamento primário de petróleo. Apostila Petrobras. PUCRio- Pontifícia Universidade Católica do Rio de Janeiro, (2012).
STORMWATER BEST MANAGEMENT PRACTICES-PERMANENT TREATMENT
MANAGEMENT PRACTICES, (2006). V.4.
Disponível em:<
http://www.nashville.gov/stormwater/docs/pdfs/2006SWMM/Volume04_BMPs/13_Gravity%
20_OilGrit_%20Separator.pdf>.
THOMAS, J. E. Fundamentos de Engenharia de Petróleo. 2. ed. Rio de Janeiro:
Interciência: Petrobras, (2004).
Baixar