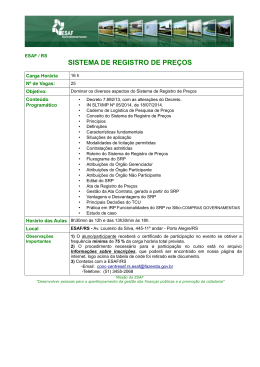
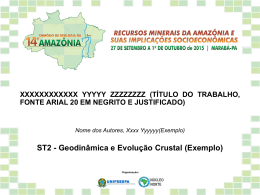
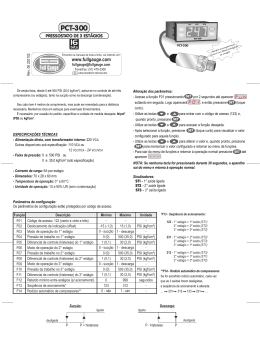
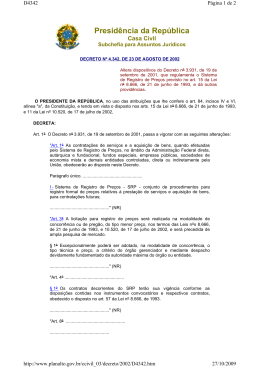
Modelização de Sistemas Industriais 27 MAIS ALGUNS EXEMPLOS PROBLEMA 5 Considere a seguinte sequência de produção em linha, com buffers de capacidade ilimitada. Chegada de peças Saída das peças do tipo p1 e p2 p1 e p2 já maquinadas stock ST1 stock ST2 Máquina M1 Máquina M2 Figura 29 As peças do tipo p1 e p2, chegam ao buffer ST1 numa sequência aleatória. De ST1 passam para M1. Desta máquina as peças vão para o buffer ST2, antes de serem processadas na máquina 2 (M2). Apesar de chegarem à cadeia de produção aleatoriamente, as peças são processadas segundo uma ordem bem definida: alternância p1, p2, p1, p2 ... A figura seguinte descreve, através de uma RdP, o funcionamento deste sistema. t1 chegada de p1 p1 em ST1 P1 P9 P11 t2 p1 em M1 P2 P6 P3 partida de p1 P4 P12 P7 p2 em M1 p2 em ST2 t9 P8 t5 p2 em ST1 t8 P10 t4 p1 em M2 P5 chegada de p2 t7 t3 p1 em ST2 t6 t10 p2 em M2 partida de p2 Figura 30 Informática Industrial, ISEP Eduardo Tovar Modelização de Sistemas Industriais 28 PROBLEMA 6 A figura 32 representa parte de um sistema automatizado. A máquina M1 recebe uma peça, processa-a e deposita-a no stock ST1. O mesmo se passa com M2 em relação a ST2. Os stocks ST1 e ST2 têm capacidade limitada, respectivamente a 4 e 5 unidades. A máquina M3 faz a assemblagem (1 peça do stock ST1 com 1 peça do stock ST2). A peça assemblada vai para o stock ilimitado ST3. Cada máquina só realiza uma operação de cada vez. Existe um sistema de transporte automatizado (neste caso um AGV) que leva as peças assembladas do stock ST3 para células de pintura. As peças são colocadas no AGV (se este estiver presente) por um ROBOT. Por razões inerentes ao sistema global de fabrico, o ROBOT está programado para transferir para o AGV alternadamente 1 peça ou 2 peças assembladas. Modelize por intermédio de uma RdP ordinária o sistema pretendido. M1 em Operação M2 em Operação ST1 ST2 M3 Livre ST3 2 2 AGV 2 Figura 31 Informática Industrial, ISEP Eduardo Tovar Modelização de Sistemas Industriais M1 29 ST1 M3 M2 ROBOT ST3 ST2 AGV Figura 32 PROBLEMA 7 A figura seguinte representa uma célula de trabalho de um sistema mais complexo. A parte em causa diz respeito a uma mesa rotativa. Cada peça tem que ser submetida a duas operações consecutivas no posto 1 (PT1) e no posto 2 (PT2). O Posto 3 (PT3) é de carga ou descarga. posto 1 posto 2 posto 3 Figura 33 A presença de uma peça a maquinar em PT1 (PT2) é assinalada pelo sinal p1 (p2). A operação em PT1 (PT2) é designada OP1 (OP2). O fim das respectivas operações é assinalada por fop1 (fop2). A presença de uma peça a carregar em PT3 é assinalada pelo sinal pc. A operação de carregar é designada CAR. O fim desta operação é assinalada por fcar. A presença de uma peça a descarregar de PT3 é assinalada pelo sinal pd. A operação de descarregar é designada DESC. O fim desta operação é assinalada por fdesc. ROT é uma operação que roda a mesa 120º no sentido dos ponteiros do relógio. Cada posto só pode conter no máximo uma unidade de cada vez. De notar que antes de carregar PT3 poderá ser preciso fazer a operação de descarga. Informática Industrial, ISEP Eduardo Tovar Modelização de Sistemas Industriais 30 Modelize por intermédio de uma RdP o sistema pretendido. ROT 3 frot 3 p1 OP1 fop1 p1 p2 p2 OP2 p p 3 EVA fop2 feva p3 p3 CAR fcar 3 p1+p2+p3+p Figura 34 Informática Industrial, ISEP Eduardo Tovar
Baixar