ESTIMAÇÃ.O DE PARÂMETROS E VELOCIDADE DA MÁQUINA
AssíNCRONA EM ACIONAMENTOS ESTÁTICOS
Luis Antonio de Souza Ribeiro t, Cursino Brandào Jacobina t e Antonio Marcus Nogueira Lima t
tCentro Federal de Educaçào Tecnológica - Sào Luís, MA
tLaboratório de Eletránica Industrial e Acionamento de Máquinas - DEE - UFPB
Caixa Postal 10105 - 58109-970 Campina Grande, PB, Caixa Postal 10105
Fone: 083-3101407/11:36; Fax: 083-3101418/1015; Email: {jacobina, marcus}@dee.ufpb.br
ReSUI110: Este trabalho trata da estimaçào de parámetros
elétricos e da velocidade angular da máquina assíncrona,
utilizando modelos dinámicos em tempo discreto com o operador delta. Em relação à resistência estatórica considerase tanto o caso em que seu valor é conhecido a. priori
quanto sua estimaçào isolada. através de um procedimento
específico. Estas duas possibilidades sào consideradas na
estimaçào conjunta dos parámetros elétricos e da velocidade angular. Também é considerada a influencia dos erros
no valor da resistência estatárica, do ponto de operaçào da
máquina, das ordens das séries de potências que determinam o modelo em tempo discreto e do nível de excitaçã.o
dos sinais de alimentaçào sobre a qua.lidade das estimativas dos parámetros elétricos e da velocidade angular. Estes
estudos são, inicialmente, levados a efeito via simulaçào digitaI e posteriormente completados através dos testes experimentais de duas máquinas assíncronas trifásicas de rotor
bobinado.
Palavras Chaves: Estimaçã-o de Parametros, JVIáquina
Assíncrona, Acionamento Estático
Abstract: This work deals with estimation of electrical parameters and angular shaft speed of the asynchronous machine using discrete time models in delta operator. vVith
respect to the stator resistance it is considered the case
where its value is known a priori as well as a specific procedure to solely estimate its value. These two cases are taken
into account in the joint estimation of electrical parameters and shaft speed. It is also considered the influences of
errors on the value of stator resistance, the machine operating poi nt" the orders of the power series that determine the
o Artigo submetido em 05/03/96:
1" Revisão em 24/09/962" Revisão em 21/05/97
Aceito por recomendação do E(J.Consultor Prof.Dr.Edson Watanabe
66
discrete time model and the input excitation leveI over the
quality of the estimates of the electrical parameters and
speed. These studies were, initially, carried out via digital simulation and further completed through experimental
tests of two tluee phase wound rotor induction machine.
Keyword: Parameter Estimation. Induction Machine, Motor Drives
1
Introdução
A estimaçào de parâmetros é uma das tarefas mais importantes no acionamento das máquinas assíncronas com alto
desempenho, pois em seus resultados é baseado o cálculo
dos controladores utilizados no acionamento da máquina.
Particularmente, a estimaçào de parâmetros é muito importante no cálculo dos controladores baseados no princípio da
orientaçào pelo campo (Lorenz ei alii, 1994). Geralmente,
os parâmetros da máquina são determinados utilizando procedimentos clássicos de medição baseados nos testes de rotor bloqueado e vazio (IEEE Standard Board, 1995). Entretanto, é possível empregar técnicas de identificaçào de
sistemas para automatizar a obtenção dos paràmetros bem
como melhorar sua precisão.
Este artigo discute a estimaçã.o linear dos parâmetros da
máquina assíncrona utilizando modelos dinamicos lineares
em tempo discretos. Na representaçào discreta utiliza-se
o operador delta (ó) j á que este operador leva a modelos
em tempo discretos numericamente mais estáveis, principalmente quando o período de amostragem é pequeno (Middleton e Goodwin, 1990), e possibilita a obtençào direta
dos parámetros contínuos sem o uso de filtros analógicos,
necessários no caso da utilizaçào de modelos contínuos. A
partir da modelagem com o operador Ó são deduzidos mode-
SBA Controle & Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
los, procedimentos e análises para estimação de parámetros
e da velocidade da máquina assíncrona.
Além desta, o artigo é organizado em mais oito Seções.
Na Seção 2 é apresentada uma revisão bibliográfica e
uma proposta de classificaçã,o das técnicas de estimação
paramétricas aplicadas à caracterizaçã,o da máquina
assíncrona. Na Seçã,o :3 é apresentado o sistema de acionamento utilizado no trabalho. Na Seção 4 é fornecido o
modelo contínuo da máquina e são deduzidos os modelos
em tempo discretos equivalentes. Na Seçã,o 5 sã,o deduzidos os modelos utilizados para a estimaçã,o. Sã,o apresentados diversos modelos, onde a resistência dos enrolamentos
do estator 1', é considerada conhecida, e um procedimento
para determinaçã,o exclusiva de 1',. Sã,o discutidos a ordem
das séries para o cálculo das matrizes discretas, o referencial utilizado para os modelos e os sinais necessários à alimentaçã,o da máquina. Na Seção 6 sã,o definidos os sinais
de alimentação da máquina e os procedimentos de aquisiçã,o
e filtragem destes sinais. Nas Seções 7 e 8 são apresentados estudos dos modelos propostos baseados em resultados
de simulação e experimentais. Em particular, investiga-se
a influência da resistência estatórica, da velocidade e do
escorregamento nos modelos de estimação propostos. Na
Seção 9 são apresentadas as conclusões finais do artigo.
2
Estimação de Parâmetros e Velocidade da
Máquina Assíncrona
Estudos recentes tem tratado da determinação de
parâmetros da máquina assíncrona, com a modelagem dq,
utilizando técnicas de estimaçã,o paramétrica. Uma amostra representativa destes trabalhos é dada nas referências
que sã,o discutidas em seguida.
Souza Filho ei aiú (1991), Klaes (1993), Moon e h:eyhani
(1994) e Zhang ef aiú (1994) utilizam modelos para
a estimaçã,o dos parametros do circuito equivalente da
máquina. Souza Filho et aJii (1991) estimam os parametros
a partir de modelos de regressã,o não-lineares, deduzidos do
circuito de regime permanente e medindo tensões, correntes e fator de potência nos terminais estatóricos. Klaes
(1993) inicialmente faz um estudo da variaçã,o paramétrica
em função da saturaçã,o e da t.emperatura e então propõe
um procedimento iterativo para a estimaçã,o on-iine das indutancias de dispersão e principal e da resistencia rotórica.
Neste caso, sã,o medidas as tensões e correntes estat.áricas
e a defasagem entre elas. :tvloon e Keyhani (1994) utilizam
o método da máxima verossimilhança para determinar os
parâmetros da função de transferência e do circuito equivalente de uma máquina com rotor de dupla gaiola. Eles
propõem um procedimento para a estimaçà.o de paTametros
com a máquina parada aplicando degraus de tensão entre
duas fases e medindo a resposta (corrente) e a entrada (degrau de tensão). Zhang ef aiú (1994) utilizam procedimentos para a estimaçà.o on-iine da indutância mútua i m e da
resistencia rotórica de máquinas assíncronas com rotor de
barras profundas, considerando que os outros parametros
da máquina variam pouco e são conhecidos. Eles determinam estes parametros através das medições das variações
no módulo e ángulo da impedancia vista dos terminais estatóricos.
Gorter ef aili (1995), Holtz e Thimm (1991), Sangwongwanich e Okuma (1991), Silvino ef aiii (1993), Atkinson
et aiú (1991) e Zai ef aiú (1992) utilizam métodos nãolineares para a determinaçà.o dos parâmetros da máquina.
GOl·ter et alii (1995) calculam os fluxos resolvendo as
equações dinâmicas da máquina em tempo real, com o
método de Runge-Kutta, e a partir destes fluxos estimam os
parâmetros. Holtz e Thimm (1991) propõem uma técnica
para identificação on-/ine de parâmetros da máquina (1'"
.1:" :t,., 1',.) baseada na avaliaçà.o da trajetória da corrente
estatórica. Um modelo analítico da máquina, com tensões
estatóricas e velocidade como entradas, opera em paralelo
com a máquina real. A coincidência das duas trajetórias
serve como um indicador do erro para o esquema de estimação. Sangwongwanich e Okuma (1991) propõem um
modelo para estimar a velocidade e a resistência rotórica
através de técnicas adaptativas tipo modelo de referência.
Silvino ef aiii (1993), Atkinson cf aiú (1991) e Zai ei aiú
(1992) utilizam o filtro de Kalman estendido (FKE) para a
estimação de estados e parãmetros. Silvino ef aiii (1993)
estimam os fluxos, a resistência rotórica e a indutância
mútua. Atkinson ef alii (1991) ut.ilizam o filtro de Kalman
(FK) para estimar os estados do modelo corrente estatóricacorrente rotórica, e estende para a estimação de 1',.. Eles fazem um estudo de sensibilidade paramétrica e concluem que
o método é principalmente sensível à 1',. Também, utilizam
o FKE de ordem reduzida, já que as correntes estatóricas
podem ser medidas, para reduzir o número de cálculos.
Concluem que o FKE de ordem reduzida exibe propriedades
de convergência semelhantes ao FKE de ordem completa,
porém é mais sensível a ruídos na mediçã,o da velocidade.
Zai ef aiii (1992) utilizam o FKE para estimar os estados do
modelo corrente estatórica-corrente rotórica e a constante
de tempo rotórica T,., mostrando que é possível estimar T,.
com velocidade constante ou variável.
Jacobina ef a.lii (1993) e Jacobina e Lima (1994) utilizam
modelos de estimação lineares de regime permanente para
obter os parametros e a velocidade da máquina. A partir
das medições das tensões e correntes estatáricas são processados modelos de regressà.o linear por meio do algoritmo
dos mínimos quadrados.
Vélez-Reyes ei aiii (1989), Stephan cf aiii (1994), Ribeiro
cf aiú (1995a) e (1995b), Ribeiro (1995), Jacobina ef alii
(1996) e .J acobina (1995) empregam modelos de estimação
lineares dinâmicos para estimar os parametros da função
de transferência corrente-tensão. Os parâmetros básicos
T,., 1'" i, e a-/., são estimados e não pode-se determinar
im . i,. e 1',. independentemente. Est.a característica é um
problema inerente da identificação sem conhecimento dos
fluxos da máquina. Vélez-Reyes cf aiii (1989) estimam
parametros e a velocidade, por meio de um modelo de regressão linear dinâmico contínuo, medindo t.ensões e correntes estatóricas e derivadas das mesmas, obtidas através
de filtros analógicos. Stephan cf aiii (1994) utilizam o
mesmo método porém com o referencial dq alinhado ao eixo
rotórico. Isto requer o conhecimento da posiçã.o rotórica e
portanto nã.o se estima velocidade. Ribeiro ei aiú (lg95a)
e (1995b) e Ribeiro (1995) baseiam-se também no modelo
dinámico da máquina, mas na sua versão discreta com
o operador f,. Eles estimam os parâmet.ros e a velocidade a partir da medição das tensões e das correntes es-
SBA Controle &. Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
67
tatóricas, obtendo as derivadas a partir de filtros discretos.
Para determinar os parâmetros contínuos utilizam períodos
de amostragem muito pequenos, ou entã-o determinam os
parâmetros através de aproximações da matriz de estados
estimada. Jacobina et alii (1996) utilizam procedimento
semelhante empregando o operador q. .Jacobina (1995) discute a utilizaçã-o dos operadores fi e q (operador deslocamento unitário) na estimação dinâmica dos parâmetros da
máquina.
Baseado na discussã-o anterior, é possível fazer uma classificaçã,o simples dos métodos de estimaçã,o dos parâmetros
e da velocidade da máquina com a modelagem dq. Os
métodos de estimaçã,o podem ser classificados em dois grandes grupos: estimaçã,o com modelos de regime permanente e estimação com modelos de regime dinâmico. A
estimação com modelos dinâmicos é sub-dividida em modelos contínuos e modelos em tempo discretos. Os vários
grupos e sub-grupos podem ainda ser sub-divididos em modelos lineares e não-lineares. Na tabela 1 é apresentada
esquematicamente esta classificaçào.
Tabela 1 - Classificaçã,o dos modelos utilizados na estimaçào de parâmetros da máquina assíncrona.
Estimaçào de Parâmetros da Máquina Assíncrona
linear
regime permanente ---c'
não-linear
linear
contínuo
---c'
não-linear
regime dinamico -linear
•
,
l
"
1
Cf
CARGA
MOTORCA
MOTOR CC
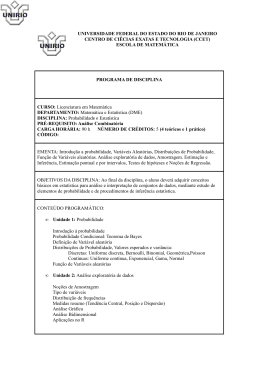
Figura 1 - Sistema de acionamento estático com máquina
assíncrona.
4
Modelo da Máquina Assíncrona
Nesta seção é apresentado o modelo contínuo da máquina
assíncrona e a partir dele são deduzidos os modelos em
tempo discretos de estado corrente estatórica-fluxo rotórico
e matriz de transferência corrente-tensão.
4.1
Modelo contínuo da máquina
A máquina assíncrona, suposta simétrica trifásica, com distribuiçào senoidal de fluxo, sem saturaçào e enrolamentos
em estrela não conectados, pode ser representada por uma
máquina assíncrona bifá.sica dq equivalente. As equações
vetoriais características da. máquina segundo um referencial
dq qualquer, indicado pelo expoente g, podem ser escritas
como se segue:
discreto -nào-linear
(1 )
É possível ainda distinguir, dentre os métodos de estimaçã,o,
dois tipos de implementações possíveis: on-Izne e off-line.
A utilizaçã,o destas alternativas depende do tipo de sinal
de alimentação da máquina e do tempo de aquisição e processamento dos algoritmos de controle e de estimação utilizados durante a estimação. Os sinais de alimentaçào necessários dependem do modelo utilizado, sendo em alguns
casos diferentes do sinal senoidal trifásico. O tempo de
aquisiçào e processamento é funçào da dinâmica do sistema,
da complexidade computacional e do microprocessador utilizado.
3
Sistema de Acionamento
Na figura 1 é apresentado o diagrama de blocos simplificado do sistema de acionamento considerado neste trabalho. Trata-se de um sistema padrào para acionamento com
máquina de corrente alternada. A máquina assíncrona é
acoplada a uma máquina de corrente contínua para simular
a carga mecânica. A alimentaçào da máquina é fornecida
por um inversor de tensão trifásico (VSI). A aquisiçào das
variáveis, o controle e o comando do sistema de acionamento sào realizados por um microcomputador.
68
_ ..~
d~f
0-l
r lr +it
G.
"
,
,
+.l(w,-wm)~,.
(2)
(3)
~f
= Imif + Irif
(4)
(5)
P(c e
-
cm)
= JdW-dt- + FW m
m
(6)
Onde aR- variáveis v's = v9s d
+.J'v'sq·. i'S = i'se! + .l·i9sq,. 't's
';" =
~;d + j~~q' sào os vetores tensào, corrente e fluxo estatórico
(os vetores do rotor são obtidos trocando-se os índices .5 por
l' ): W m e w g representam a velocidade angular da máquina e
a velocida.de angular dos eixos dq; Ce e Cm são os conjugados
eletromagnético e mecânico. Os parametros lo< e Ir, sào as
indutâncias próprias do estator e rotor e Im a indutância
mútua; 1', e l'r são as resistências do estator e do rotor; J,
F e P são o momento de inércia, o coeficiente de atrito e o
número de pares de pólos. O expoente ., - " e Im indicam
o complexo conjugado e a parte imaginária e j = yCT.
A partir das expressões de tensões (1) e (2) e de fluxos (3)
e (4) pode-se escrever as equações da máquina assíncrona
SBA Controle & Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
em termos das correntes estatóricas e fluxos rotóricos, no
referencial estatórico (g +- s, w,q = O), na forma de estado
d:r(t)
~
= A(w m
)
+ Bu(t
)
(7)
onde
", +"r(lm / Ir ')0
A=
[
~
ais lrTr
U)m 1m
- (TI,l r
O
(TI,
_ ", +", (Im / Ir f
O
(TI,
!.:m.-
1
O
Te
Tr
Im,
O
Wm
Tr
[
B=
x-
[
1
(TI,
(TI,
q;~eI
1;q
'"eI
U
]
.,
-j'5
O O
O O
O
O
= [V~eI
v:
q)~q
~
(TI, I r
~
a-l s 1r T r
-W 111
_.l
r
]T
]
,
Tr
onde Pi, i = 1,"', n são os pólos do sistema contínuo.
Observa-se de (11) e (12) que o limh~o li = Pi, para o caso
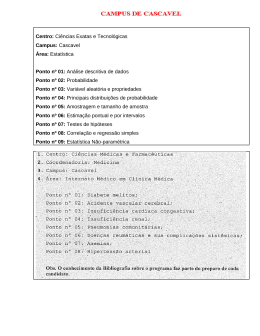
em delta, e que o limh~o Zi = 1, para o caso em z. Na figura
2 mostra-se as regiões de estabilidade para os modelos com
os operadores q e <5. Os pólos da funçào de transferência
dos respectivos modelos devem estar dentro dessas regiões
a fim de que as respostas dos sistemas sejam assintoticamente estáveis (Middleton e Goodwin, 1990). Note que a
medida que h ~ O, a região de estabilidade com o operador
[, expande-se por toda a região esquerda do plano complexo.
Esta é a região de estabilidade dos sistemas contínuos, o que
mostra novamente que os modelos em [, convergem para os
modelos contínuos a medida que o período de amostragem
tende a zero.
Á Im
e
Â
T
q ]
sendo T,. = I,'; r',. e (T = 1 - I~,/(lsl,.) a constante de tempo
rotórica e o coeficiente de dispersão da máquina.
o
. I Re
~
-=L.
. O Re
h
h
4.2
Im
Modelo em tempo discreto da máquina
.,- .. _------"
Admitindo que durante o período de amostragem h as
tensões e a velocidade são mantidas constantes, o modelo
em tempo discreto da máquina com o operador li é dado
por
(8)
<5x(t) = Fx(t) + Hu(t)
Figura 2 - Regiões de estabilidade para os pólos com os
operadores q e [,.
As matrizes F e H em (8) são definidas por meio de
o operador
li nesta relação é definido por
<5x(t)
= [x(t + h) -
J:(t)]/h
(l3)
(9)
o
modelo em tempo discreto com o operador li apresenta condicionamento numérico superior ao modelo em
tempo discreto com o operador Ij. principalmente, quando o
período de amostragem é pequeno (Middleton e Goodwin,
1990), e tende ao seu equivalente contínuo quando h tende
para zero. Esta última propriedade pode ser observada da
equação (9), quando h -'- Oentão lix(t) ~ dx(t)/dt, ou seja,
lix(t) tende para a derivada de .r(t).
Pode-se definir a transformada delta, variável de transformação ~l' a partir da transformada Z. Se F (z) é a transformada Z da função f(t) então a transformada delta desta
função F t:. h) é dada por
(lO)
Observa-se que a relação entre as variáveis de transformação ~f = (z -l)/h é análoga a relação entre os operadores [, = (q - l)/h.
H = (I
eh]i, -
1
= ---h
(14)
Em termos das submatrizes, a equação (8) pode ser escrita
como
[ [,Xl
[
]
[,.r2
onde
.Tl
=[
.,
l.~d
F ll
F 21
F 12
F 22
]
[
i Ssq ]T e ;r2=
.rl
X2
[
]+[
q;~eI
Z~~
][u]
(15 )
q;;~q ]T.
Os fluxos magnéticos não são mensuráveis diretamente em
máquinas usuais, então eles são eliminados da equação (15).
Aplicando-se a transformada delta e utilizando as definições
= H ll
F 12 F22 F 1--;} H ll = F 12 H 21 H1
H o = F 12 H 21
-
(18)
F 22 H l1 (19)
pode-se eliminar os termos de fluxo em (l5), obtendo-se a
seguinte relação entre corrente e tensão nos terminais da
máquina:
e com operador <5 é dado por
~ii
A 3 h3
onde I é a matriz identidade de ordem 4. Também, observase que A = limh~o F e B = limh~o H, denominada aproximação de primeira ordem.
Quando um segurador de ordem zero é usado na entrada
do sistema, os pólos do modelo em tempo discreto com o
operador IJ é expresso por
(11 )
A 2 h2
Ah
+ -,
+ -3'- + - .4.1 - + .... )B
2.
(12)
SBA Controle & Automação jVol.8 no. 2jMai., Jun., Jul. e Agosto 1997
(20)
69
onde a matriz de transferencia G" ('y) é dada por
As simplificações nas equações (16)-(19) devem-se a propriedade de multiplicação comutativa das submatrizes de F e
H.
De fato, estas submatrizes são do tipo [
a, b]
-) a
que
são comutativas para a multiplicação.
Introduzindo-se os elementos das matrizes Fi, F o, H 1 e H o
e aplicando-se a transformada delta inversa em (20), chegase à. seguinte expressão:
fOb]
fOa
h
Ob
h oa
]
[~;d]
+
1
sq
[~;d]
t sq
= Fi + H oH 1 1
= -HoH 1 (H 21 == O)
F 12 F 21 = Fd = F o - H oH 1 1(F1 + H oH 1 1)
F 22
(25)
(26)
Se h ---+ O as matrizes de (21) podem ser calculadas
empregando-se a aproximação de la ordem para F e H
e as equações (16)-(19), obtendo-se
(27)
Modelo A: Estimação sem a priori
Re-escrevendo o modelo corrente-tensão dado por (22) na
forma de uma regressão linear (31), obtem-se o seguinte
modelo:
(33)
8 = [ ha
alsT r
h oa
h Ob ]
[
Ho == [
1
ai,
O
O
ar;
1
a/ s T r
_'o:'..m.
T,.,
i" cri" e
Wm
ai,
]
1
'o:'..m.
ai,
1
(T/s 71'
(29)
]
(30)
[
,').,
'~'.'
l'
sq
(J~
(J~1~d
com
]T
Modelos para Estimação Paramétrica
V"
"q -
-V: d
Para propósitos de estimação, utilizando os mínimos quadrados (LS), o modelo do sistema deve ser escrito na forma
de uma regressão linear (Middleton e Goodwin, 1990)
y(tll1)
= f(t)11
(:31 )
onde y(tll1), f(t) e 8 são o vetor de predição, a matriz de
regressão e o vetor paramétrico, respectivamente.
O vetor paramétrico é obtido minimizando uma função de
custo, geralmente dada por
= 2~ I: )"N-te(t, I1f e(t, 8)
1=1
s
""q
l' 1'
+ 1'" i: d
]
(37)
W rn
1
1
(T/s 71'
ai,
(38)
Os parametros contínuos são obtidos diretamente de (38)
= 8(2),
Wm
;;is
= 1/8(4),
i;.
= 8(4)/8(:3),
~
= 8(1)/8(3)
Também, os parametros discretos ha, f1/;. fOa, fOb, h 1a ,
h oa e h Ob podem ser obtidos, a partir de (38) e de 1'", por
meio de
N
70
(35)
Considerando que 1', é conhecido, estimado usando o Modelo D, pode-se desenvolver, a partir de (33 )-( :35), um modelo para determinar T", (" cri s e W m . Este modelo é deduzido utilizando a aproximação de primeira ordem (F = A e
H = B). Neste caso, tem-se
y =
1íN (I1)
T
ai,
H1 ==
5
h 1b
Modelo B: estimação de
1', con hecido
(28)
~
h 1a
fOb
fOa
Em Ribeiro et alii (1995a) é mostrado como obter os
parámetros contínuos T,., is. cri s , 1'" e a velocidade W m a
partir de 11, por meio de aproximações de primeira e segunda ordem para as séries F e H (1:3 )-( 14). Entretanto,
1's é estimado com uma precisão ruim, assim é interessante
desenvolver modelos para estimar somente 1'" e retirá-lo do
modelo (3:3)-(35), melhorando a precisão da estimação dos
demais parâmetros. O modelo e o procedimento para. a estimação específica de 1'" é apresentado na Seção 5.4 (Modelo
D). Nos dois itens seguintes são apresentados o Modelo B,
para a estima.ção de Tr , is, cri" e w m , e o Modelo C, para a
estimação de T,., is, cri s com W m = O, assumindo, em ambos
os casos, que 1'" é conhecido.
5.2
_--!..L-
F o == [
5.1
(:34)
(24)
1
Para estimar os parámetros da máquina usando o algoritmo
LS é necessário re-escrever (22) como um modelo de regressão linear na forma dada em (:31).
(22)
Observa-se que é possível obter algumas das submatrizes
do modelo de estado (15) a partir de Fi, F o, H 1 , H o. De
fato, utilizando as equações (16)-(19) pode-se escrever as
seguintes relações:
H l1 = H 1
(23)
F l1
onde e(t, (1) = y(t) - iJ(tW) é o erro de predição, )" é o
fator de esquecimento e N é o número de amostras. O
algoritmo dos mínimos quadrados para o cálculo 11 pode ser
encontrado em (Ljung, 1987).
(:32)
fOb
ha = -8(1) - 1',,8(4),
= -1',,8(5), h 1a = 8(4),
SBA Controle &. Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
flb
h 1b
= -8(2), fOa = -1'88(3)
= O, h oa = 8(3), hOb = 8(5)
Conforme será mostrado, a estimação de TI" e I, em alta
velocidade só é possível caso a aproximação de 2Q. ordem
seja usada (F = A + A'2 h/2 e H = B + ABh/2). Então,
a partir dos parâmetros estimados com (36)-(38) e de 1',
obtem-se os parametros discretos lIa, .tlb, .tOa, fOb, h 1a ,
h oa e hOb (h 1b = O) e por meio de (23 )-( 26) recupera-se
as matrizes discretas H 11, F 11 , F 22 e o produto F 12 F 21 =
F d . Os novos parâmetros contínuos podem ser calculados a
partir das seguintes expressões:
2+~F11(I,1)
~
(39)
Jb~ - 2ho. T
2a T
(40)
ls = CJ"l s [1 _ ~.~(1, 2)r,.]
(41)
CJ"l s =
T,.
2H ll (I,1)
= -b
T
±
r=
[
-oi',d
-oi~q
B=
5.4
v: d - 1'si~d
'V~q
ov'sd -1'"oi: d
ov'sq - 1"oi~q
.,
-
Tsl';q
_1,_
al,T r
]
l]T
1
al,T,.
(47)
ai,
Modelo D: estimação isolada de
(46)
1',
Como foi mostrado por Ribeiro et alii (199530) e Jacobina et
alii (1996) a est.imação de 1', baseada no modelo dinâmico,
não é satisfat.ória. Isto ocorre porque ela depende dos t.ermos sem derivada (sem o operador o). Como os demais t.ermos são dominantes na matriz de regressão r, uma melhor
estimação de 1'8 pode ser obtida excitando-se a máquina
com tensões CC, implicando derivadas (t.ermos em o) nulas.
F:dl, 2)
Wm
= -Fn (1, 2)
(42)
com
Com a alimentaçào CC tem-se: ov~ = O. Assumindo que a
velocidade varia lent.amente, então 02i~ = O e oi~ = O, e o
modelo dado por (33)-(35), com a aproximação de primeira
ordem, em termos dos componentes dq se escreve
(48)
A razão desta aproximação de 2Q. ordem vem do fato que
expandindo-se a matriz F até o segundo termo da série (13)
tem-se que o elemento correspondente a T,. é dado por
F 22 (1,1)
1
1 h
(;"
h
= -+ 0:+ CJ"1,lrr,~" -2 T,.
ri 2
2
h
2
(49)
W m :-
NIanipulando estas expressões obt.em-se um resultado esperado
Observa-se em (43) que existe um termo em w~,. Se a aproximação de lQ. ordem for usada, este termo e todos os outros
em h desaparecerão. Porém em altas velocidades o termo
w~, % não é desprezível, mesmo para pequenos períodos de
amostragem. Daí a necessidade de se utilizar a aproximação
de 2.Q. ordem. Uma possibilidade de se evitar este problema
é alinhar o eixo de referência d, do modelo dq da máquina,
com o eixo rotórico (w g = wm ), neste caso tem-se
(44)
(50)
(51)
Destas equações fica evidente que com alimentaçào CC, só
se pode estimar a resistência estat.órica. Assim, em velocidade muito baixa, quando a freqüência de alimentação é
próxima de zero, a est.imaçào dos outros parámet.ros e da
velocidade da máquina é mais difícil de ser obtida.
A partir das equações (50) e (51) escreve-se o seguinte modelo de regressão:
Contudo, para alinhar o eixo d ao eixo rotórico é necessário
o conhecimento do ángulo de posição mecánica, o que nem
sempre é disponível.
S
V sq
]
Por outro lado, em velocidades baixas pode-se estimar os
parâmetros contínuos diretamente de (38). Isto se deve ao
fato de que o t.ermo em w;;, é desprezível em baixa velocidade.
í'8q
B=
5.3
Modelo c: estimação de T,., I" CJ"l s com
conhecido e W m = O
sq
]T
]T
]
(52)
(5;3)
(54)
1',
A estimação de TI"' I" CJ"l s à velocidade nula é importante
para o processo de auto-comissionamento da máquina. Utilizando um sinal apropriado é possível manter a máquina
parada e excit.á-la de forma persistente (Ljung, 1987) para
a estimaçã-o. Fazendo-se W m = O em (:36)-(38) obt.em-se o
seguinte modelo:
,1)2"
. 1
[ 1',
T
(45)
Para se considerar o efeit.o das variações da resist.ência em
funcionamento contínuo da máquina, propõe-se um ensaio
onde à tensào senoidal trifásica de alimentaçào, responsável
pela imposição da frequência e da velocidade de operação da
máquina, é adicionado um sinal de tensão CC trifásico. O
sinal CC deve ser de amplitude pequena para nào perturbar
muito a operaçào da máquina. Um filtro passa baixa é
utilizado para extrair as parcelas de tensão e corrente CC
a serem processadas, segundo o modelo (52)-(54), com o
algoritmo LS.
SBA Controle & Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
71
6
Sinais de Alimentação e Filtragem
Os sinais utilizados para a alimentação da máquina nos
ensaios de estimação de parâmetros e velocidade foram: seis
degraus (SI), vetores ativos com média nula (52), nível
CC puro (5'3) e senoidal+nível CC (5'4). Como será visto,
estes sinais podem ser facilmente gerados por meio de um
inversor de tensão.
No caso do ensaio a velocidade nula, nenhum meio mecânico
é utilizado para manter a máquina parada. A operação com
velocidade zero é obtida alimentando-se a máquina com
tensões específicas para este fim. Dados os vetores ativos
criados pelo inversor de tensão no plano dq, seis vetores de
mesma amplitude e com defasagem entre vetores adjacentes
de 60° (cf. figura 3) (Van der Broeck. 1988), e a frequência
de alimentação f" a seguinte seqüência de vetores (5'2) é
empregada em cada ciclo T s = 1/ fs
s T í S]
[1.' 8 T í S T í S T í 8 ]
85 ,. 85 ,. s2 T,/') \. 83" s6 I s6" 83 T,/6
s
1I8~ 1''']
. [v81}s.lIs3s lI83S 11sI}8.] T,/6
[1184 lISsl 11'
sl V']
s4 T,/6 [V's5 1I~
s~ s_ 85 T,/'}
[
rs TT s T n T l 8 ]
,. sll' s4 I' s4 ,. sl T,/6
T
[T
l8 TI 8 T l
I' s2'
8
Comparando-se esta seqüência com o sinal seis degraus, que
é definida por
S]
8
]
[l'S]
[lIslS ]T./6 [lI82
T./6 [V"
83 ]T./6 [11'
847,/6
',5 T,/6 [V86 ] T./6
pode-se compreender melhor como ele foi sintetizado. Por
exemplo, na forma de onda seis degraus o vetor l/~Sl pennanece ativo por T 8 /6, enquanto na seqüência proposta ele é
substituído pela combinação [1/~~ v~~ lr,~ lI,,'l]T /6, que fornece
tensão média nula no período T /6. Com a seqüência proposta o valor médio do conjugado eletromagnético é zero e
a máquina permanece parada. Também, a forma de onda
desta tensão possui conteúdo harmonico adequado para excitar a máquina de forma persistente.
correntes, antes de serem utilizados no algoritmo de estimaçã-o (Ribeiro, 1995). Neste trabalho, foram utilizados
quatro filtros digitais idênticos de terceira ordem, um para
cada variável v;d' V;q, i~d e i~q' Estes filtros digitais foram
obtidos pela discretização de um filtro contínuo de terceira
ordem cuja função de transferência é dada por
(55)
com W c = 5w s , onde W 8 é a frequência de pulsação fundamental da tensão estatárica de alimentação. Este mesmo
filtro, com Wc = 12ír1'ad/s foi utilizado na estimação de 1'S·
7
Estudos por Simulação
Os estudos por simulação foram realizados utilizando-se o
modelo dinâmico da máquina (l )-(6). Este modelo é discretizado na forma dada por (8), utilizando as séries (13) e
(14) truncadas no termo em h 5 com h = 5/l.s, e ca1culado
recursivamente. Os algoritmos de estimaçào são executados
com os dados obtidos da simulação da máquina amostrados
com h = 50ps.
O ruído de medição foi considerado aditivo. A fonte de
ruído possui média zero e é uniformemente distribuída no
intervalo
[-1'" max(v~d'
[-1';
onde 1'v = 0,05 e
v:
q ), 1'v max(v~d' V~q)]
max(i~d' i~q)' 1'i max(i~d' i~q)]
1'i
= 0,2.
Figura :3 - Vetores tensã-o ativos gerados pelo inversor de
tensão no plano dq.
Nas tabelas 2 e :3 estão os resultados de simulação com o
Modelo B, considerando que o valor de 1's é conhecido corretamente. Foram feitos dois ensaios: um com a máquina
em vazio e outro com 10% de escorregamento. O sinal de
alimentação foi seis degraus (51) com freqüência de 60H;;.
Observa-se que os erros de estiInaçã-o aumentam com o aumento do escorregamento. Com o escorregamento de 10%
os erros em T" e 18 são maiores que 15%. Para efeito de
comparação, sào mostrados nas tabelas 4 e 5 os resultados
obtidos com o Modelo A., equações (:3:3 H 35) e aproximação
de segunda ordem (Ribeiro et alii 1995a, 1995b), para o
cálculo dos parâmetros contínuos. Observa-se que todas as
variâncias obtidas com o Modelo B (tabela 2) são menores e
que os parametros contínuos (tabela :3) também são estimados com erros menores, principalmente com escorregamento
de 10%. Além disso. o número de condicionamento da matriz de covariancia (Ljung, 1987) obtido com o Modelo B
é da ordem de 10 6 enquanto que o número de condicionamento com o modelo completo (3:3)-(:35) é da ordem de
10 10 .
As componentes de tensão (t';d' V;q) e corrente (i;d' i;q) são
obtidas diretamente por meio da medição das tensões e correntes estatáricas em duas das três fases da máquina. Estes sinais são filtrados por meio de filtros de antialiasing
e convertidos por meio de conversores A/D. Os sinais na saída dos conversores A/D são filtrados digitalmente, o que permite a obtenção direta das derivadas
(8'u;d' 8v: q, 8i~d' 8i~q' PV;d' PV~q, Pi~d' Pi~q) das tensões e
Os resultados em baixa velocidade sao apresentados nas
tabelas 6 el. Embora as covariáncias da estimação sejam maiores que aquelas obtidas em alta velocidade (tabela 2), os erros na estimação dos parámetros contínuos
são menores. Observa-se ainda que o efeito do escorregamento é desprezível em baixa velocidade. Por outro lado, é
possível estimar-se os parámetros contínuos em baixa velocidade com o sinal seis degraus. Isto não é conseguido com
q
_------~,...-------.,.
72
d
SBA Controle & Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
Tabela 2 - Modelo B: parâmetros discretos, sinal 51, 60Hz,
h = 50ps
vazIO
10% esc.
8;
variancia
vananCla
erro
(%)
erro
(%)
J
I
-1.049
5.8x10
-0.9215 6.4x10 I
ha
6
1.6x101.6x10- 6
3.8087
4.8178
flb
8.1xl0-"
8.0x10-"
h 1a
0.4384
0.5149
l.:3x10- 3
8.9x10- 5
-0.57
hoa
11.95
3
2.3x10- 3
2.lx100.7031
1.1352
h Ob
Tabela 3 - Modelo B: parámetros contínuos, sinal SI,
60Hz , h = 5011S. aproximacào dE' 2!!. ordem
Parâllletros vazIO - W 11l = 314 10% esc.- W m = :3:39
erro(%)
erro(%)
8;
real
Tabela 4 - Modelo A: parâmetros discretos, sinal 51,
60Hz , h -- 50ps
8;
vazIO
10% esc.
erro
(%)
vananCla
erro
(%)
vananCla
J
b
-4.02
-0.8501 1.7x10
2.2x10 I)
ha
6
1.7x102.2x10- 6
2.9612
4.81
flb
-1691
-1085.5
1.6295
1.6535
foa
41.35
6.061:3
1.6295
1.6535
fOb
9.9x10- 9
1.0x10- 8
h 1a
0.883
0.7134
9.9xlO- 9
-5:303
-2582.3 1.0xl0- 8
hlb
-41.65
h oa -1.3:303
0.0026
0.0123
1.62:39
h Ob
0.342
0.0026
0.0123
>
i,
0.:39
0.0667
0.0059
0.094
l..l.t'n1
-
l' S
T1'
cri"
O
-15.4705
-0.5800
-H:i.25()l
0.7028
O
1.8804
-0.5079
1.0791
0.3465
o modelo com a estimaçào simultánea de
Ribeiro et aiii (1995a, 1995b).
1'."
,< ,
propostos por
Para dar uma indicaçào da robustez do Modelo B à incertezas no valor de 1>" foram feitas uma série de estimações
com os mesmos dados de simulaçào. Para cada valor de r,
na faixa de ±50% do valor nominal, os outros parâmetros
foram estimados utilizando o algoritmo dos mínimos quadrados em lote com 4000 amostras. Os resultados são mostrados na figura 4 para baixa velocidade (10H z) e na figura
5 para alta velocidade (60H:::) . Nestas figuras são apresentados os erros de estimaçào (erro = 100(8; - 8;0)/8;) dos
parametros (T,., i" cr, w m ) em funçào dos valores de 1>,.
Observa-se que à exceção de TI' todos os outros parâmetros
são estimados com boa precisào. mesmo com erros de 50%
em 1',. Por outro lado, os erros de estimaçào aumentam
pouco quando a velocidade diminui.
15
2.5
2
/
1.5
/
5
1
""
~0.5l
:;
O
-0.5l
/
/
(J)m/
/
~~ O
/
~:" -5
-10
ais
-15
-1 /.
-1.5
10
/
rslr,o
-50
O
50
-20
-50
O
50
Figura 4 - Sensibilidade do l'vlodelo B à variações em
10H:::.
8
Tabela 5 - Modelo A: parâmetros contínuos, sinal 51,
h.-- 50p s 60Hz aproximaçào
de 2!!. ordem
"
Parâllletros vazIO - W m = 374 10% esc.- W tll = 3:39
real
erro (%)
erro (%)
8
"
0.:39
l' ,
5.1:3
39.56
0.0667
3.79
34.34
T,.
-0.9571
cri,
0.0059
-0.7899
0.094
24.3889
2.697
i,
-0.287:3
0.8:357
W 11l
1'" -
Estudos Experimentais
Os resultados experimentais foram obtidos utilizando o
sistema de acionamento disponível no Laboratório de
Eletrànica Industrial e Acionamento de Máquinas (LEIAM)
do DEE- UFPB-Campus lI. conforme o diagrama apresentado na figura 1. Neste sistema, a unidade central de processamento (CPU) é um 80486DX2-66 com placa mãe compatível com o padrào IBM/PC. Uma placa especialmente
projetada, ligada ao barramento do computador, realiza
as funções de aquisição e comando. A placa possui um
temporizador programável (PIT8254), uma interface paralela programável (PPI8255), uma unidade de conversào
analógica/ digital (cinco canais com amostragem simultânea
AD573/582) e uma unidade de conversào digital analógica
(DAC1008). As tensões e correntes da máquina são medidas através de dispositivos de efeito HaU, que garantem
uma banda de passagem de 300kH z e isolaçào elétrica apropriada. Duas correntes de fase e duas tensões de fase sào
medidas. Após o estágio de ajuste de ganho e antes da
conversào analógica/digital, estes sinais sào filtrados por
filtros ativos de segunda ordem (filtros de antiaiiasing).
Um encoder ótico absoluto (AE6:jS), conectado a interface
paralela programável, mede a posição angular do eixo da
máquina. A velocidade angular é obtida das leituras do
encoder. O inversor trifásico que alimenta a máquina, emprega chaves de potência do tipo transistor bipolar. Os
sinais de comando para ligar e desligar as chaves sào gerados pela unidade de intervalo de tempo programável. A
isolação galvânica entre o microcomputador e o circuito de
comando da base é assegurada por optoacopladores de alta
velocidade (HPCL2601).
Na figura 6 mostram-se os resultados experimentais de estimaçào de 1', com um sinal CC puro (5:3) e um sinal
CC+senoide (54) para uma máquina assíncrona cujo valor
da resistência estatórica obtida com medição direta é 1.80.
Na figura 6 é apresentado a evolução de 1', estimado a velocidade nula e com um sinal 53 ('V~1 = -51/, v~'] = IOF e
71:3 = -51/), sem a utilizaçào de filtro. Também na figura
6 é apresentado a estimação de l's à frequência f, = 60H:::
e com o sinal 54 obtido acrescentando ao sinal CC anterior
tensões senoidais trifásicas de 60H::: e 1501'. Neste último
caso, o filtro foi calculado para W o = 127rl'ad/s. Os valores
médios obtidos para 1', nos dois ensaios, mostrados na figura 6, são bastante próximos: 1.870, sinal 5'4 com filtro,
SBA Controle & Automação jVol.8 no. 2jMai., Jun., Jul. e Agosto 1997
73
/5
/0
0.6
Tabela 6 - Modelo B: parámetros discretos, sinal 81, 10Hz,
h = 50p.s
(J ,.
10% esc.
vazlO
erro(%) variiincia erro (%) vananCla
.L
2.4xl0 -4
2.3xl0 4
0.1854
0.1688
ha
4
4
2.2xl02.3xl05.061
5.2161
.flb
0.;3437
0.0374
h 1a
0.0235
0.3637
4.1xl0- 5
4.0xl0- 5
0.6249
h oa
0.2207
0.2821
0.6682
0.2505
h Ob
0.6974
Tabela 7 - Modelo B: parámetros contínuos, sinal SI,
10Hz , 11.= 50lt8.
10% esc.- W m = 56.51
Parânletros vazio - W m = 61
erro (%)
(Ji
real
erro (%)
(Jls
ls
0.;39
0.0667
0.0059
0.094
W l1J
-
l' S
/7'
0.0
0.7416
-0.4423
1.5316
0.4477
0.5
oom/
/
0.4
/
ls
f~ 0.3 ~;-/
" 0.2
0./ /
/
Tabela 8 - Modelo B: sinal 81, mà.quina de 1.5kVV.
W 11J = 57.6;31'ad/8
W m = 3G67'ad/8
(Ji
rbv
estimo vananCIa estimo vananCla
l' s
1.8
r,.
0.0427
0.0119 2.4xl0- 4 0.0243 29xl0- 3
(Jls
0.0213
0.0192 ;3.5xl0- 9 0.0209 4.1xlO- 6
0.1124 4.7xl0- 6 0.1096 4.5xl0- 4
0.1279
ls
;3.6xl0- 4
9.6xl0- 6
W 1H
366.5
56.37
Parâluetros
Na tabela 9 são apresentados os resultados para uma
máquina de 2.2k {IV. Para esta máquina observa-se que as
variâncias são menores que aquelas da tabela 8, porém o
valor da função de custo é maior (19%).
74
/
O
&
~ -5 ~
1:,
"-/O
-/5
-
ui,
's frso
50
O
-20
-25
's/~w
-50
O
Figura 5 - Sensibilidade do Modelo B à. variações em
60Hz.
I
50
7's -
Sinal CC puro
,:1
tis
00':-....L..-0-:-.4-,-----~--=O'-;:c.8~-1:":.2c--...=17'.6·
e 1.820, sinal 5'3 sem filtro.
Para avaliar as variações paramétricas utiliza-se o Modelo
B com o sinal 81 em velocidades diferentes de zero. Os
resultados são apresentados na tabela 8 para uma máquina
de l..5HV e tabela 9 para uma máquina de 2.2kVV. Nestas tabelas a coluna 7,bv fornece os parámetros da máquina
obtidos por meio dos testes clássicos de rotor bloqueado e
vazio. Na tabela 8 são mostrados os parámetros estimados
e as variâncias em duas velocidades diferentes. Observa-se
que as variáncias aumentam com a diminuição da velocidade. Também, o valor mínimo da função de custo aumenta com a diminuição velocidade (13% em 36Gl'ad/ s e
17 .5% em 57 .631'ad/ s). Isto revela a dificuldade de estimar
parâmetros em velocidades baixas.
5
~
/
~50
0.0
0.3075
-0.4222
1.1382
0.4018
Obtido o valor de 1'" utilizam-se os Modelos B e C para
a estimação dos outros parâmetros. Num primeiro estágio
utiliza-se o Modelo C com o sinal 82. Os resultados com velocidade nula utilizando o Modelo C (45)-(47) são apresentados na figura 7. O algoritmo utilizado foi o dos mínimos
quadrados recursivo, com fator de esquecimento À = 0.999.
Comparando os resultados desta figura com aqueles apresentados por Ribeiro et alii (1995b), observa-se uma nítida
melhora em termos da covariáncia das estimativas e transitório de estimação.
/
Figura 6 - Estimação de r, com o modelo D: sinais 83 e
84.
Na figura 8 mostra-se a estimação dos parâmetros contínuos
para esta máquina. Observa-se que os parâmetros são estimados com boa precisão e que o parámetro que apresenta
maior variáncia é r,..
Para validar a estimação, na figura 9 teI~-se as formas de
onda da corrente medida (i~d)' simulada (i~d) e o erro entre
elas para os parámetros estimados de acordo com os dados
da tabela 8 (figura 9a) e para os parâmetros obtidos dos testes de rotor bloqueado e em vazio (figura 9b). Observa-se
na figura 9a que o erro entre as corrente é menor, comprovando que os parámetros estimados são os mais corretos
para esta condição de operação.
9
Conclusão
Neste trabalho foram propostos modelos para estimação de
e para a estimação de (Jl" r,., ls e W m com 7', conhecido.
Apresentou-se uma revisão bibliográfica e uma classificação
para a estimação de parámetros da máquina assíncrona.
Mostrou-se que a inclusão de 1' s no algoritmo de estimação,
produz um mal condicionamento na estimação dos outros
parámetros e requer em baixa velocidade sinais mais ricos em harmónicos. Mostrou-se que as incertezas no valor
de r, praticamente não influenciam a estimação dos outros
parálnetros, a exceção de r,.. Foi mostrado que o aumento
do escorregamento aumenta os erros de estimação em alta
velocidade, principalmente de r,. e I,. Foi demonstrada a
importância da utilização da aproximação de segunda ordem na estimação em altas velocidades nos modelos no referencial estatórico. Os resultados de simulação e experilllentais mostraram que é possível estimar 1' s , isoladamente,
e os outros parámetros com boa precisão.
7',
SBA Controle &. Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
Tabela 9 - Modelo B: sinal 51, 10Hz, màquinade 2.2.HV.
Parâmetros W n1 = 59.90rad/s
rbv
estimo variância
'.
e
0.05
0.03
~ 0.02
0.04
0.03
lt.----------.....,
w'rn
-
T,.
crI,
IV
"
-'"
b
~
0.01
l,
2.0
0.0898
0.0329
0.2517
l' s
-
-
0.0828
0.0216
0.2322
58.83
1.5xl0- 3
1.5xl0- i
1.9xl0- 5
1.7xl0- 5
0.01
tis)
00~~---;0;-".4,------'-;OO.'oc8~-I,-';.2,------''''-;I'7.6
tis)
O0lL-~0~.4-~0~.8~~1~.2~"'1:'.CJ.6
(h)
(a)
0.2
0.16
-4
t:
e
0.12
/
-6~~~,-;,;:;-~i:;-'--;;-;;-;:---';;-l;~
O 0.01
:; 0.08
0.03
(h)
0.04
0.4
1.2
0.8
Figura 9 - Formas de onda de i~d' i~d e fi da. máquina de
1.5kW: a) parâmetros estimados; b) parâmetros obtidos
dos testes rbv.
tis)
1.6
(e)
Figura 7 - Estimação com w m
1.5HF: a) crI,,; b)T,.; c) 1.,.
=:
O sinal 52 e máquina de
0.14
0.03
0.02
0.02
Os métodos de estimação propostos podem ser utilizados
com um sistema de acionamento padrão, necessitando apenas que o inversor seja comandado em malha aberta de
forma a gerar os sinais de tensão adequados. Particularmente, o ensaio a velocidade nula, utilizando o valor de r s
obtido no ensaio com o Modelo D, é indicado para a determinação inicial dos parâmetros e permite um procedimento
simples para o auto-comissionamento da máquina..
Agradecin1.entos: Os autores agradecem ao CNPq pelo
apoio à realização deste trabalho.
V
2
Referências Bibliográficas
ti"
0.06
0.02
tis)
0"::-0~---;0;;"-.4;--'-;OO."':::8~----;-'1.2:--LCl.-7.6
t
O
0.4
0.8
1.2
S
1.6
(h)
(a)
0.4
100
80
0.3
velocidade medida
,...:., ",,,.,, '" ...,n, ~
~ 60~,~#Ml!.lJl'0/~~llil't'J!l'I.
~
SE 40
0.1
velocidade estimada
20,
0.4
0.8
(e)
1.2
tis)
1.6
0.4
0.8
1.2
tis)
1.6
(d)
Figura 8 - Modelo B, sinal 51, 10Hz, máquina de 2.2HV:
a) crI,,; b) T,.; c) Is ; d) Wm
Atkinson, D ..J., P.P. Acarnley and .J.W. Finch (1991). Observers for induction motor state and parameter estimation. IEEE Transactions on Industry Applications,
VoI. 27, na 6, pp. 1119-1127.
Gorter, R ..J .A .. P. P. J. Van den Bosh and S. Weiland
(1995). Simultaneous estimation of induction machine
parameters and velocity. Proceedings of the Power
Electronics Spec.ialists Conference, Atlanta, Georgia,
USA, pp. 1295-1:301.
Holtz, J. and T. Thimm (1991). Identification of the machine parameters in a vector-control1ed induction motor drive. IEEE Transactions on Industry Applications, VoI. 27, nO 6, pp. 1111-1118.
IEEE Standards Board (1995). Electric machinery - IEEE
Standard Test Procedure for Polyphase Induction Motors and Generatol's. Piscataway, New Jersey. IEEE
Press .
.Jacobina, C.B., A.M.N. Lima and A.L.R. "Medeiros (1993).
Linear parameter estimation of an induction machine.
SBA Controle & Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
75
Proceedings of the Power Electronics Specialists Conference, Seattle, USA, pp. 913-918.
Jacobina, C.B. and A.M.N. Lima (1994). Parameter estimation modeIs for induction machines. Proceedings of
the Industry Applications Society Conference, Denver,
Colorado, USA, pp. 726-{3:3.
Jacobina, C.B. (1995) Contribuição a estimação e ao
controle em acionamentos estáticos com máquina
assíncrona. Tese para concurso de professor titular,
Universidade Federal da Paraíba, Departamento de
Engenharia Elétrica.
Jacobina, C.B., A.rvI.N. Lima e L.A.S Ribeiro (1996). Estimação linear de parâmetros e velocidade da máquina
assíncrona usando um modelo discreto corrente-tensão.
Revista Controle e Automação, Vol. 7, na 3, pp. 147155.
Klaes, N.R. (1993). Parameter identification of an induction machine with regard to dependencies on saturation. IEEE T):ansactions on Industry Applications,
Vol. 29, nO 6, pp. 1135-1140.
Ljung, L. (1987). System identification: theory for the
user. Massachusetts Institute of Technology, Englewood Cliffs, New Jersey.
Lorenz, R.D., TA. Lipo and D.W. Novotny (1994). Motion control with induction motors. Proceedings of
IEEE: Special Issue on Power Electronic and rvIotion
Control, Vol. 82, na 8, pp.1215-1240.
Middleton, R. and G. Goodwin (1990). Digital control
and estimation. A unifled approach. Prentice-Hall.
Inc., Englewood Cliffs, New Jersey.
Moon, S.-I. and A. Keyhani (1994). Estimation of induction machine parameters from standstill time-domain
data. IEEE Transactions on Industry Applications,
Vol. 30, nO 6, pp. 1609-1615.
Ribeiro, L. A.S. (1995).
parâmetros e velocielade
Dissertação ele mestrado,
Paraíba, Departamento ele
PELE.
Silvino, J .L., C. P. Bottura. e P. Resenele (1993). Observadores de fluxo e estimação ele parámetros da máquina
de inelução via moelelamento eliscreto não estacionário.
Revista Controle e Automação, Vol. 4, nO 1, pp. 1122.
Sousa F!., E. B., A.M.N. Lima and C.B. Jacobina (1991).
Parameter estimation induction machines via nonlinear least squares methoel. Proceeelings of the Inelustrial Electronics Society Conference (IECON), Kobe,
Japan, pp. 6:39-643.
Stephan, J., M. Boelson and J. Chiasson (1994). Real-time
estimation of the parameters anel fluxes of induction
motors. IEEE Transactions on Inelustry Applications,
Vol. :30, nO 3, pp. 746-759.
Van eler Broeck, H.W., H.-C. Skudelny anel G.V. Stanke
(1988). Analysis anel realization of a pulsewielth moelulator baseei on voltage space vectors. IEEE Transaction on Industry Applications, Vol. 24, nO 1, pp.
142-150.
Vélez-Reyes, IVI.V., K. Minami anel G.C. Verghese (1989).
Recursive speeel and parameter estimation for ineluction machines. Proceedings of the Inelustry Applications Society Conference, pp. 607-611.
Zai, L.-C., C.L. De:Marco anel TA. Lipo (1992). An exteneled Kalman filter approach to rotor time constant
measurement in pwm ineluction motor elrives. IEEE
Transactions on Inelustry Applications, Vol. 28, nO 1,
pp. 96-104.
Zhang, Z., G.E. Dawson anel TR. Eastham (1994). Evaluation of elynamic parameters anel performance of deepbar ineluction machines. Proceeelings of the Industry
Applications Society Conference, Denver, Colorado,
USA, pp. 62-66.
Estimação dinâmica de
da máquina assíncrona.
Universidade Federal da
Engenharia Elétrica - CO-
Ribeiro, L.A.S., C.B ..Jacobina and A.M.N. Lima (1995a).
Dynamic estimation of the induction machine parameters anel speeel. Proceedings of the Power Electronics Specialists Conference, Atlanta, Georgia, USA,
pp. 1281-1287.
Ribeiro, L. A.S., C.B. Jacobina anel A.M.N. Lima (199.5b).
Parameter anel speed estimation of ineluction machine
baseei on elynamic moelels. Proceedings of the Conference on European Power Electronics anel Applications, Sevilla, Spain, pp. 1496-1501.
Sangwongwanich. S. anel S. Okuma (1991). A unifieel approach to speeel and parameter ielentification of ineluction motor. Proceeelings of the Industrial Electronics
Society Conference (IECON), Kobe-Japan, pp. 712715.
76
SBA Controle &. Automação /Vo1.8 no. 2/Mai., Jun., Jul. e Agosto 1997
Baixar