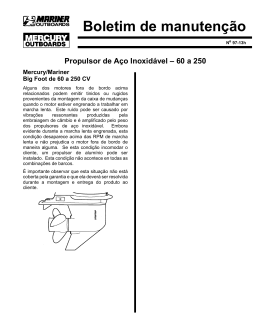
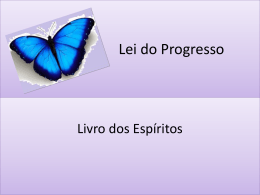
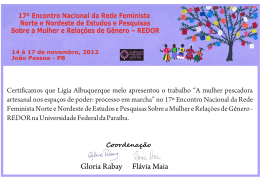
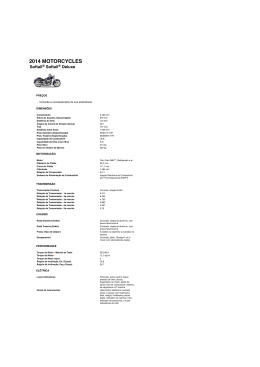
Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) Cinemática do Movimento Comparativo experimento Lab 2 e artigo - Cesqui et al. - Catching a Ball at the Right Time and Place: Individual Factors Matter) 26/Out/2012 [email protected] Medindo Movimento no Corpo Humano… 1) Definir os parâmetros estáticos do corpo … Modelo Segmental 2D Valores Medidos Experimentalmente –! Centro-de-Massa –! Comprimentos dos segmentos –! Localização da articulação 2) Monitorar a mudança destes ao longo do tempo na medida que suas localizações variam chegando aos parâmetros dinâmicos … Dados do Segmento Articulações deslocamentos, velocidades, & acelerações (linear & angular) CM –! Deslocamento Linear e Angular –! Velocidade Linear e Angular Dados Movimento Cinemático Comprimentos –! Aceleração Linear e Angular Movimento & Tempo Movimentos independentes - Eixos e ângulos Análise de Movimento - medições (laboratório) Ângulos de Euler: representam uma orientação espacial de um sistema qq de referência com a composição de rotações deste." •! Linha de nós (N)" •! Ângulo entre o eixo-x e a linha N (!)" •! Ângulo entre o eixo-z e o eixo-Z (")" •! Ângulo entre a linha N e o eixo-X (#)" 1 Análise de Movimento - Direct Linear Transformation (DLT) Análise de Movimento - Direct Linear Transformation (DLT) (vetor) A = N & O A = [(x-xo), (y-yo), (z-zo)] Espaço (UVW) (vetor) (O) espaço do objeto (XYZ) •! Plano Movimento // Plano Imagem B = c A (colinearidade) (I) plano da imagem (UV) (N) centro de projeção •! Imagem ! Objeto ($ escala) B = [(u-uo), (v-vo), (-d)] ** colinearidade % base método DLT d: distância principal entre os pontos P e N. Análise de Movimento - Direct Linear Transformation (DLT) Análise de Movimento - Direct Linear Transformation (DLT) vetor A no quadro de referência do plano I vetor A no quadro de referência do espaço O matriz transformação O/I % Coeficientes L1 a L11 ' Parâmetros da DLT & vo são coordenadas no plano de imagem em medidas reais (cm) – porém no processo de digitalização a unidade é diferente (= pixels) u, v, uo Análise de Movimento - Direct Linear Transformation (DLT) Análise de Movimento - Direct Linear Transformation (DLT) Coeficientes L1 a L11 [!u, !v] = fatores de conversão para os eixos U e V, respectivamente. Equação padrão da DLT (3D) Mostram as relações entre o sistema de referência do objeto-espaço e o sistema de referência do planoimagem. d: distância principal entre os pontos P e N. Parâmetros da DLT 2 Análise de Movimento - Direct Linear Transformation (DLT) Análise de Movimento - Direct Linear Transformation (DLT) Matriz de transformação ["u, "v] = Erros óticos L12 a L14 : distorção ótica L15 a L16 : de-centralização da distorção (Walton, 1981) Erros de calibração da câmera e reconstrução Calibração do Volume de medição do Movimento Matriz para m câmeras Análise de Movimento - alinhamento de eixos (3D) Marcadores adicionais p/ definição do sistema global de referência Volume de calibração Ponto de controle Análise de Movimento - alinhamento de eixos (2D) Análise de Movimento - orientação angular •!Matriz de rotação •!coordenadas cartesianas •!ângulos de Euler * Unificação do sistema de referência (dados cinemáticos + cinéticos) 3 Marcha Humana Movimento do cotovelo (extensão-flexão) •! Biomecânica: é um dos movimentos mais comuns. Nela estamos expostos a forças externas constantes e, portanto, o estudo dessas forças cinemática angular nos leva a entender mecanismos dinâmicos da marcha. •! Neurofisiologia: é uma sequência de eventos reflexos, compondo movimentos altamente complexos, que uma vez aprendido torna-se subconsciente. Vários mecanismos de controle motor na geração/controle deste padrão de movimento. EMG •! Medicina e Fisioterapia: entendimento dos mecanismos dinâmicos e reflexos permite-nos a intervenção para a reeducação da marcha, um dos objetivos terapêuticos mais importantes. Marcha Humana Nosso sistema nervoso não pode causar o movimento desejado diretamente:! •! A descrição da marcha envolve a medição de variáveis que possam ser identificadas como padrão característico no andar. Ativação Muscular! •! Estas variáveis de interesse podem ser divididas nas que refletem a causa do padrão e nas que descrevem o efeito: •! os sinais de EMG e momentos de força se aproximam das Processamento! SNC! Geometria Musculoesquelética! Neurônios Motores! Commandos p/ Músculos! Dinâmica Musculoesquelética! causas do movimento •! as variáveis cinemáticas (velocidades, comprimento de Observação! Comportamento/ Movimento! Dinâmica dos segmentos conectados! FC! Ft! passada, ângulos articulares) e forças de reação do solo Fg! Fgr! refletem o produto de muitos efeitos integrados Quatro grandes áreas contribuem para a pesquisa/ estudo do movimento:! Fisiologia! Dinâmica Ambiental! Marcha Humana Biomecânica! Neurociência! Psicologia Experimental! FC! Ft! Fg! Fgr! Dinâmica dos Corpos Rígidos! 7 eventos que levam a marcha Dinâmica Ambiental! 4 Marcha Humana Marcha Humana - sequência (inversa) eventos EMG Tensão muscular 3 •! Transporte seguro e eficiente no espaço terrestre. Forças e Momentos articulares (Allard, 1995). 4 •! Mais comum de todos os movimentos humanos. O Equações do movimento padrão de variabilidade de uma passada no dia-a-dia é moderadamente baixo (Winter, 1991). Massas e Inércia dos segmentos Velocidades e Acelerações •! O ciclo da marcha é uma sequência maravilhosamente Antropometria dos segmentos corporais Deslocamentos dos segmentos Forças de Reação do Solo (FRS) 5 6 7 orquestrada de eventos elétricos e mecânicos que culminam na propulsão coordenada do corpo através do espaço (Lieber, 1992). Marcha Humana - Ciclo de caminhada Marcha Humana - Ciclo completo •! Fase apoio! •! Fase balanço ! •! Suporte duplo! •! Suporte Simples! •! Passo direito! •! Passo esquerdo! •! Passada! calcanhar contato-inicial D (RHC) 0-10% dedos-fora E (LTO) 10-30% 30-50% 50-60% dedos-fora D (RTO) calcanhar contato-inicial E (LHC) Fase Apoio = RHC >> RTO Fase Balanço (oscilação) = LTO >> LHC Nomenclatura básica! Ciclo da Marcha - ângulos articulares Movimentos Plano Sagital tornozelo joelho quadril 5 Movimentos Plano Frontal quadril Movimentos Plano Transverso Rotação Quadril joelho Rotação Joelho pé Avaliação de Movimentos dos Membros Superiores Sistema de Vídeo (normal ou IV) •! Instrumentos para análise e avaliação dos Marcadores passivos movimentos •! Estudos utilizando estes métodos Sistema de Sensores Magnéticos Marcadores ativos Aquisição de dados Domínio: Tempo - Frequência 6 Representação de uma onda quadrada Aquisição de dados •! Frequência de amostragem fs Teorema de Nyquist: A frequência de amostragem deve ser, no mínimo, duas vezes a frequência máxima (fm) do espectro de fourier do sinal analógico v(t). Aquisição de dados •! Cinemática (cap. 2 Winter – pag.13) •! Medidas diretas (goniômetro, acelerômetro, luva instrumentada) •! Técnicas de imagem (fator de conversão, calibração – filmadora comercial, Sistemas Comerciais – Vicon, OptoTrack) •! Taxa de aquisição de dados (conversor A/D) – reconstrução do sinal •! Processamento de dados “brutos” – Análise de Fourier – harmônicos – Exs. (Figs. 2.17, 2.18 – Eqs. 2.3-2.8) – Fig. 2.24 •! Técnicas de Processamento (“smoothing” e filtragem) •! Espectro de frequência do sinal (Fig.2.26) Amostragem (A/D) •! Frequência de corte – coeficientes do filtro passa-baixa •! Tipos de filtro (Butterworth + Ordem) •! Escolha da Freq. de corte •! Comparação e Técnicas – Fig. 2.30 •!Ângulos e Segmentos dos membros inferiores •! Velocidade e Aceleração Referências: - Winter, D.A. (2005). Biomechanics and motor control of human movement. John Wiley & Sons, 2a ed., New York. - Whittle, M.W. (2007) Gait Analysis – an introduction. Elsevier Ltd, 4th Ed. Aliasing (distorção – artefato) 7
Baixar