CENTRO UNIVERSITÁRIO DA FEI
DEPARTAMENTO DE CIÊNCIA DA COMPUTAÇÃO
DISCIPLINA: COMPUTAÇÃO GRÁFICA
PROF. DR. PAULO SÉRGIO RODRIGUES
TURMAS: CC7420/CC6111; 23/09/2010
PROVA P1
NOME DO ALUNO:
MATRÍCULA:
1) Em que situação inverter a ordem das aplicações de uma matriz de
escalonamento S seguida de uma matriz de rotação R sobre um ponto P não
altera o resultado final?
2) Seja o ponto P = (2,4,8,2) em coordenadas homogêneas. Aplicando-se uma
rotação de 90º no eixo y e convertendo para coordenadas cartesianas, qual o
valor final de P?
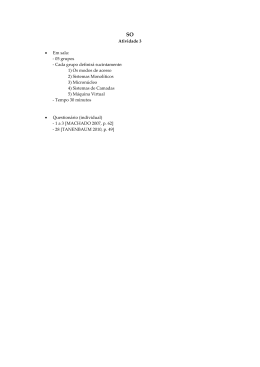
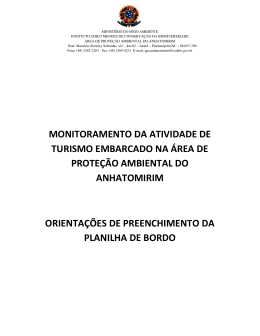
3) Considere o modelo mostrado na Figuras 1 a seguir, com duas câmeras em um
sistema de imageamento stereo (exatamente o mesmo apresentado em sala de
aula). Considere também que a distância focal de ambas as câmeras é λ = 3 e a
distância entre os dois pontos focais é B = 8. Num primeiro momento, existe um
ponto W1 = (X1, Y1, Z1) localizado no centro de uma esfera de raio R. W1 está
em coordenadas do mundo e é projetado na Imagem 1 como o ponto p1 = (5,10)
e na Imagem 2 como o ponto p2 = (3,10). Num segundo momento, W1 sofre
uma translação para o ponto W2 = (X1’,Y1’,Z1’) que se localiza na periferia
dessa esfera, passando a ser visualizado na Imagem 1 como o ponto p1’ = (7,10)
e na Imagem 2 como o ponto p2 = (2,10). Calcule R.
4) Explique sucintamente o que é ambigüidade colinear?
5) Suponha 4 pontos de controle em uma curva de Bézier {B0, B1, B2, B3} =
{(2,2),(6,18),(14,18),(18,2)}. Usando o Algoritmo de Casteljau para encontrar a
curva final, quais os três valores finais encontrados pelo algoritmo por onde a
curva passas se o critério de subdivisão é u = 0.5; ou seja, a cada iteração, o
espaço entre dois pontos de controle é dividido por dois?
6) Explique sucintamente como uma NURBS pode ser utilizada para a) navegação
de objetos em um ambiente de Jogo; b) Zoom-In e Zoom-Out em um Sistema de
Partículas para simulação de Fluidos; por exemplo, se deseja-se visualizar em
tempo real um mergulho dentro de num fluido.
p1
p2
W1
p1
W1
p2
21
Figura 1: Parte superior: Modelo de câmera stereo alinhada com o mundo;
Parte Inferior: vista superior (na direção y) do modelo.
Baixar