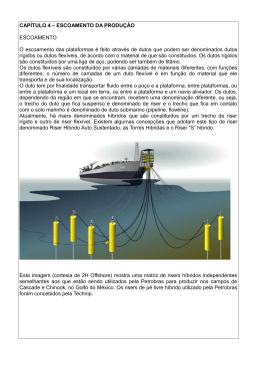
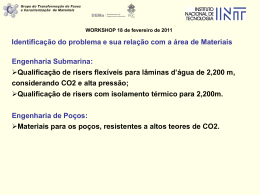
ZONAS DE OPERAÇÃO SEGURAS DE RISERS PARA PROJETO INTEGRADO COM SISTEMAS DE ANCORAGEM Carolina Almeida dos Guaranys Projeto de Graduação apresentado ao Curso de Engenharia Civil, Escola Politécnica, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro Civil. Orientadores: Bruno Martins Jacovazzo Bruno da Fonseca Monteiro Rio de Janeiro Agosto de 2015 ZONAS DE OPERAÇÃO SEGURAS DE RISERS PARA PROJETO INTEGRADO COM SISTEMAS DE ANCORAGEM Carolina Almeida dos Guaranys PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE ENGENHARIA CIVIL DA ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO CIVIL. Examinado por: _______________________________________________ Prof. Bruno Martins Jacovazzo, D.Sc. ________________________________________________ Prof. Bruno da Fonseca Monteiro, D.Sc. ________________________________________________ .Prof. Ricardo Valeriano Alves, D.Sc. ________________________________________________ Prof. Henrique Innecco Longo, D.Sc. RIO DE JANEIRO, RJ- BRASIL. AGOSTO DE 2015 ii Guaranys, Carolina Almeida dos Zonas de Operação Seguras de Risers para Projeto Integrado com Sistemas de Ancoragem / Carolina Almeida dos Guaranys. - Rio de Janeiro: UFRJ / ESCOLA POLITÉCNICA, 2015. XI, 77 p.: il.; 29,7 cm Orientadores: Bruno Martins Jacovazzo e Bruno da Fonseca Monteiro Projeto de Graduação – UFRJ / POLI / Engenharia Civil, 2015. Referencias Bibliográficas: p.76-77. 1. Sistemas Offshore. 2. ZOR. 3. Sistema Integrado de Ancoragem x Risers. I. Jacovazzo, Bruno Martins et al. II. Universidade Federal do Rio de Janeiro, Escola Politécnica, Curso de Engenharia Civil. III. Zonas de Operação Seguras de Risers para Projeto Integrado com Sistemas de Ancoragem. iii Agradecimentos Agradeço primeiramente à minha família, em especial os meus pais e irmã, Denise Correa de Almeida, Rogério Tiraboschi dos Guaranys e Erica Almeida dos Guaranys, meus maiores exemplos de integridade e superação. Essa conquista é de vocês também. Aos verdadeiros amigos que não desistiram da minha amizade mesmo com minha frequente ausência fruto do tempo livre que a faculdade de Engenharia me tomou. Aos meus orientadores Bruno Jacovazzo e Bruno Monteiro pela dedicação e orientação, e por dividir comigo suas experiências como engenheiros nos últimos meses. Sem isso eu não seria capaz de finalizar esse trabalho. A todos da instituição de ensino superior UFRJ, professores, amigos e pessoas que cruzaram meu caminho e conviveram de alguma forma comigo nesses últimos anos. Elas contribuíram para a pessoa que sou hoje e, por isso, agradeço. iv Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte dos requisitos necessários para a obtenção do grau de Engenheiro Civil. ZONAS DE OPERAÇÃO SEGURAS DE RISERS PARA PROJETO INTEGRADO COM SISTEMAS DE ANCORAGEM Carolina Almeida dos Guaranys Agosto/2015 Orientadores: Bruno Martins Jacovazzo e Bruno da Fonseca Monteiro Curso: Engenharia Civil O presente trabalho visa determinar zonas seguras de operação de risers (ZOR) de um sistema flutuante de produção offshore de um modelo representativo de um caso real. Essas zonas definem uma envoltória de offsets para a plataforma que deve ser considerada no projeto de ancoragem, ou seja, o sistema de ancoragem deve ser capaz de manter a plataforma dentro da região segura para os risers, garantindo a integridade do sistema. Essa metodologia visa uma maior integração entre os projetos de ancoragem e risers, que tradicionalmente são realizados de forma independente. Palavras-chave: Zonas de Operação de Risers, Projeto Integrado, Estruturas Offshore v Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the requirements for the degree of Civil Engineer. RISERS SAFE OPERATIONAL ZONES FOR AN INTEGRATED PROJECT WITH ANCHORING SYSTEMS Carolina Almeida dos Guaranys August/2015 Advisors: Bruno Martins Jacovazzo e Bruno da Fonseca Monteiro Graduation: Civil Engineering This study aims to determine risers safe operational zones (SAFOP) of a floating offshore production system that is representative of a real case model. These zones define an offset envelope for the platform, which should be considered in the mooring system design. In other words, the mooring system should be capable of maintaining the platform inside the risers safe zone, ensuring the system integrity. This methodology aims for a higher integration between the risers and mooring projects, which traditionally are performed in an independently way. Key words: Risers Safe Operational Zone, Integration project, Offshore Structure vi SUMÁRIO ÍNDICE DE FIGURAS ............................................................................................................................ ix ÍNDICE DE TABELAS ........................................................................................................................... xi 1 Introdução .......................................................................................................................................... 1 1.1 Histórico .................................................................................................................................. 1 1.2 Contexto ................................................................................................................................. 2 1.3 Objetivos ................................................................................................................................. 3 1.4 Organização ............................................................................................................................ 4 2 Sistemas Offshore ............................................................................................................................. 5 2.1 Tipos de Plataforma ................................................................................................................ 6 2.1.1 Plataforma Semi-Submersível......................................................................................... 6 2.1.2 FPSO ................................................................................................................................ 7 2.2 Sistemas de Ancoragem.......................................................................................................... 9 2.2.1 Tipos de Arranjo.............................................................................................................. 9 2.2.2 Composição das linhas de ancoragem.......................................................................... 11 2.2.3 Configurações Geométricas .......................................................................................... 13 2.3 Tipos de risers ....................................................................................................................... 15 2.3.1 Riser Rígido (Steel Catenary Riser - SCR) ...................................................................... 16 2.3.2 Riser flexível .................................................................................................................. 16 2.3.3 Sistemas Híbridos.......................................................................................................... 16 3 Tipos de Carregamento .................................................................................................................. 18 3.1 Carregamentos Funcionais ................................................................................................... 18 3.2 Carregamentos Ambientais .................................................................................................. 19 3.2.1 Onda.............................................................................................................................. 19 3.2.2 Corrente ........................................................................................................................ 19 3.2.3 Vento............................................................................................................................. 20 4 Projeto Integrado Ancoragem x Risers ......................................................................................... 21 4.1 Comportamento das linhas de ancoragem e dos risers ........... Erro! Indicador não definido. 4.2 Zona Operacional dos Risers – ZOR ...................................................................................... 23 4.3 Diagrama de Offsets ............................................................................................................. 27 4.4 Cruzamento do Diagrama de offsets com a ZOR .................................................................. 29 5 Estudo de Caso ................................................................................................................................ 30 5.1 Introdução ............................................................................................................................ 30 vii 5.2 Descrição do Modelo ............................................................................................................ 31 5.3 Casos de Carregamentos ...................................................................................................... 33 5.4 Critério de Projeto dos Risers ............................................................................................... 35 5.5 Resumo dos Resultados da ZOR ........................................................................................... 37 5.6 Resultados Detalhados ......................................................................................................... 41 5.6.1 Direção Norte................................................................................................................ 41 5.6.2 Direção Nor-Nordeste................................................................................................... 43 5.6.3 Direção Nordeste .......................................................................................................... 44 5.6.4 Direção És-Nordeste ..................................................................................................... 46 5.6.5 Direção Leste ................................................................................................................ 48 5.6.6 Direção És –Sudeste ...................................................................................................... 50 5.6.7 Direção Sudeste ............................................................................................................ 52 5.6.8 Direção Su-Sudeste ....................................................................................................... 54 5.6.9 Direção Sul .................................................................................................................... 56 5.6.10 Direção Su-Sudoeste ..................................................................................................... 59 5.6.11 Direção Sudoeste .......................................................................................................... 60 5.6.12 Direção Oés-Sudoeste................................................................................................... 63 5.6.13 Direção Oeste ............................................................................................................... 65 5.6.14 Direção Oés-Noroeste................................................................................................... 67 5.6.15 Direção Noroeste .......................................................................................................... 69 5.6.16 Direção Nor-Noroeste................................................................................................... 71 6 Comentários Finais ......................................................................................................................... 74 7 Propostas para Trabalhos Futuros ................................................................................................ 76 8 Referências ...................................................................................................................................... 77 viii ÍNDICE DE FIGURAS Figura 1 - Profundidade de exploração de petróleo da camada Pré-sal [1] ......................................... 1 Figura 2 - Tipos de Plataformas Offshore [2] ....................................................................................... 6 Figura 3 - P-55: A maior plataforma SS do Brasil [3] .......................................................................... 7 Figura 4 - Turret interno [4] ................................................................................................................ 10 Figura 5 - Turret externo [4]................................................................................................................ 10 Figura 6 - Spread Mooring System [5] ................................................................................................ 10 Figura 7 - Amarra de elo com malhete [6] .......................................................................................... 11 Figura 8 - Cabo de Aço [7] .................................................................................................................. 12 Figura 9 - Cabo de Poliéster [7] .......................................................................................................... 12 Figura 10 - Catenária Convencional [8] ............................................................................................. 13 Figura 11 - Comparação Catenária com Taut-Leg [9]........................................................................ 14 Figura 12 - Modelos de Risers usados no Pré-Sal [3] ......................................................................... 15 Figura 13 - Camadas do Riser Flexível [4] ......................................................................................... 16 Figura 14 - Boia de Sustentação de risers – BSR [3]........................................................................... 17 Figura 15 -Torre de Risers [3] ............................................................................................................. 17 Figura 16 - Exemplo de ZOR [12]........................................................................................................ 24 Figura 17 - Diagrama de Offsets [12].................................................................................................. 27 Figura 18 - Superposição do Diagrama de Offsets e a ZOR [12] ........................................................ 29 Figura 19 - Vista 3D do modelo ........................................................................................................... 31 Figura 20 - Vista superior do Modelo .................................................................................................. 32 Figura 21 – Exemplo da configuração triangular da corrente ............................................................ 34 Figura 22 - ZOR sem carregamento ambiental .................................................................................... 37 Figura 23 - ZOR com carregamento ambiental ................................................................................... 38 Figura 24 - Comparação entre as ZORs .............................................................................................. 39 Figura 25 - Direção Norte .................................................................................................................... 41 Figura 26 - Deslocamento limite .......................................................................................................... 42 Figura 27 – Comprimento mínimo apoiado ......................................................................................... 42 Figura 28 - Direção Nor-Nordeste ....................................................................................................... 43 Figura 29 – Deslocamento limite ......................................................................................................... 44 Figura 30 - MBR não violado ............................................................................................................... 44 Figura 31 -Direção Nordeste ............................................................................................................... 45 Figura 32 – Deslocamento limite ......................................................................................................... 46 Figura 33 - MBR não violado ............................................................................................................... 46 Figura 34 - direção És-Nordeste .......................................................................................................... 47 Figura 35 – Deslocamento limite ......................................................................................................... 48 Figura 36 – MBR não violado .............................................................................................................. 48 Figura 37 - Direção Leste .................................................................................................................... 49 Figura 38 – Deslocamento limite ......................................................................................................... 50 Figura 39 – MBR não violado .............................................................................................................. 50 Figura 40 - Direção És-Sudeste ........................................................................................................... 51 Figura 41 – Deslocamento limite ......................................................................................................... 52 Figura 42 – MBR não violado .............................................................................................................. 52 Figura 43 - Direção Sudeste................................................................................................................. 53 Figura 44 – Deslocamento limite ......................................................................................................... 54 ix Figura 45 - MBR não violado ............................................................................................................... 54 Figura 46 - Direção Su-Sudeste ........................................................................................................... 55 Figura 47 – Deslocamento limite ......................................................................................................... 56 Figura 48 – Interferência violada ........................................................................................................ 56 Figura 49 - Direção Sul ........................................................................................................................ 57 Figura 50 - Deslocamento limite .......................................................................................................... 58 Figura 51 - Interferência violada ........................................................................................................ 58 Figura 52 - Direção Su-Sudoeste ......................................................................................................... 59 Figura 53 – Deslocamento limite ......................................................................................................... 60 Figura 54 - MBR não violado ............................................................................................................... 60 Figura 55 - Direção Sudoeste............................................................................................................... 61 Figura 56 – Deslocamento limite ......................................................................................................... 62 Figura 57 – Interferência violada ........................................................................................................ 63 Figura 58 - Direção Oés-Sudoeste ....................................................................................................... 63 Figura 59 – Deslocamento limite ......................................................................................................... 64 Figura 61 – Interferência violada ........................................................................................................ 65 Figura 61 - Direção Oeste .................................................................................................................... 65 Figura 62 – Deslocamento limite ......................................................................................................... 66 Figura 63 – Interferência violada ........................................................................................................ 67 Figura 64 - Direção Oés-Noroeste ....................................................................................................... 67 Figura 65 – Deslocamento limite ......................................................................................................... 68 Figura 66 – Interferência violada ........................................................................................................ 69 Figura 67 - Direção Noroeste .............................................................................................................. 69 Figura 68 – Deslocamento limite ......................................................................................................... 70 Figura 69 – Comprimento mínimo apoiado ......................................................................................... 71 Figura 70 - Direção Nor-Noroeste ....................................................................................................... 71 Figura 71 – Deslocamento limite ......................................................................................................... 72 Figura 72 – Comprimento mínimo apoiado ......................................................................................... 73 x ÍNDICE DE TABELAS Tabela 1 - Propriedades dos Risers...................................................................................................... 32 Tabela 2 - Velocidades das Correntes .................................................................................................. 33 Tabela 3 - Critério de Utilização dos risers ......................................................................................... 36 Tabela 4 - Violações da ZOR sem carregamento ambiental ................................................................ 38 Tabela 5 - Violações da ZOR com carregamento ambiental................................................................ 39 Tabela 6 - Direção Norte ...................................................................................................................... 41 Tabela 7 - Direção Nor-Nordeste ......................................................................................................... 43 Tabela 8 - Violação Direção Nor-Nordeste ......................................................................................... 43 Tabela 9 - Direção Nordeste ................................................................................................................ 45 Tabela 10 - Violação Direção Nordeste .............................................................................................. 45 Tabela 11 - Direção És-Nordeste ......................................................................................................... 47 Tabela 12 - Violação Direção És-Nordeste .......................................................................................... 47 Tabela 13 - Direção Leste .................................................................................................................... 49 Tabela 14 - Violação Direção Leste ..................................................................................................... 49 Tabela 15 - Direção És –Sudeste.......................................................................................................... 51 Tabela 16 - Violação Direção És –Sudeste .......................................................................................... 51 Tabela 17 - Direção Sudeste................................................................................................................. 53 Tabela 18 - Violação Direção Sudeste ................................................................................................. 53 Tabela 19 - Direção Su-Sudeste ........................................................................................................... 55 Tabela 20 - Direção Sul ........................................................................................................................ 57 Tabela 21 - Direção Su-Sudoeste ......................................................................................................... 59 Tabela 22 - Violação Direção Su-Sudoeste .......................................................................................... 59 Tabela 26 - Direção Sudoeste............................................................................................................... 61 Tabela 24 - Direção Oés-Sudoeste ....................................................................................................... 64 Tabela 25 - Direção Oeste .................................................................................................................... 66 Tabela 26 - Direção Oés-Noroeste ....................................................................................................... 68 Tabela 27 - Direção Noroeste .............................................................................................................. 70 Tabela 28 - Direção Nor-Noroeste ....................................................................................................... 72 xi 1 INTRODUÇÃO 1.1 Histórico O petróleo no Brasil começou a ser explorado em 1953, onde a primeira jazida de petróleo foi descoberta, no município de Lobato, Paraná. No ano de 1968, a empresa brasileira Petrobras passou a desenvolver um projeto de extração, e em 1974, após a descoberta de poços na Bacia de Campos, a maior reserva de petróleo do país, iniciou-se a exploração de petróleo em águas profundas. Com o passar do tempo, o Brasil tornou-se uma das poucas nações a dominar a tecnologia de exploração petrolífera em águas profundas e ultraprofundas, e passou a ser reconhecida internacionalmente com alta capacidade técnica para tal. Foi no ano de 2007, que o governo brasileiro anunciou a descoberta do novo campo, a camada présal, ilustrada esquematicamente na Figura 1, a qual se encontra do litoral de Santa Catarina ao litoral do Espírito Santo. São poços de petróleo que estão de 5 a 7 mil metros de profundidade, capazes de dobrar o volume de produção de óleo e gás combustível do Brasil. Por este motivo, o cenário de águas profundas determinava um aperfeiçoamento das técnicas de exploração e perfuração. Figura 1 - Profundidade de exploração de petróleo da camada Pré-sal [1] 1 1.2 Contexto As principais plataformas flutuantes de produção usualmente empregadas consistem em: casco, que suporta o topside (“convés”) onde ocorre a separação e o tratamento do gás, óleo e água; linhas de ancoragem, que limitam os passeios do casco com a ação das condições ambientais; e os risers, onde os fluídos advindos da exploração são transportados do poço ao casco. A prática tradicional de projeto dos sistemas de ancoragem e risers consiste em realizar análises separadas e independentes de cada projeto. Nelas se definem diferentes limites de passeio do casco para cada direção, a partir de experiência prévia em sistemas similares e verifica-se se os passeios estabelecidos não violam nenhum critério estrutural. Eram assim elaborados um projeto para os risers e outro para o sistema de ancoragem, desconsiderando a influência entre si. Com o avanço da exploração para águas cada vez mais profundas, verificou-se a necessidade de considerar no projeto a influência da interação entre os componentes (casco, risers, linhas de ancoragem), pois nesse cenário os risers passam a ter maior influência em termos de massa, amortecimento e rigidez, além de transmitir ao casco as cargas de correnteza. Vem sendo desenvolvidos então, com a evolução dos modelos computacionais, estudos de projeto integrado entre os risers e a ancoragem, para assim otimizar e aprimorar os procedimentos. Os projetos se tornaram mais econômicos e de melhor desempenho ao evitar o superdimensionamento dos mesmos. 2 1.3 Objetivos Este trabalho tem como objetivo estabelecer os passeios limites de uma determinada plataforma, configurando uma zona de operação segura, denominada ZOR (Zona Operacional dos risers), a fim de evitar possíveis danos estruturais nos risers. A partir dos resultados, um projeto de um sistema de ancoragem poderia ser elaborado de maneira a manter a plataforma dentro dessa zona de segurança. Além disso, pode-se avaliar e realizar alterações no projeto dos risers para uma melhor eficiência. O processo inicia-se por realizar simulações do sistema de risers baseada em um modelo de elementos finitos representativo da plataforma considerada. Aplicam-se carregamentos ambientais e movimentos prescritos no topo dos risers, verificando-se por fim os critérios estruturais. 3 1.4 Organização De início, no Capítulo 2, são descritos os elementos básicos de um sistema offshore, como os principais tipos de plataformas flutuantes e seus principais componentes, como o sistema de ancoragem e os risers. Posteriormente, o Capítulo 3 retrata os tipos de carregamentos funcionais e ambientais considerados nos projetos de risers e dos sistemas de ancoragem. A ação ambiental é caracterizada pelas forças atuantes devido ao vento, onda e correnteza. Apresenta-se no Capítulo 4 a metodologia do projeto integrado do sistema de ancoragem e dos risers. É descrito o método que define uma envoltória de passeios limites para o sistema de risers de uma plataforma, definido como ZOR (Zona Operacional dos Risers). Descreve-se também para o sistema de ancoragem, como o diagrama de offsets são elaborados e, na Seção 4.4, a incorporação da ZOR no seu projeto final. O estudo de caso é descrito no Capítulo 5, em que um sistema de risers representativo da realidade é analisado para a concepção de sua zona segura de operação. Inicia-se pela descrição do modelo estudado e dos casos de carregamento aplicados. Na Seção 5.4, os critérios de projeto dos risers utilizados no trabalho são descritos. São, portanto, expostos os resultados da análise do sistema com suas devidas considerações. Por fim, no Capítulo 6 apontam-se as conclusões e avaliações finais do estudo a partir dos resultados da análise realizada e no Capítulo 7, são sugeridos trabalhos futuros que possam completar o presente estudo. 4 2 SISTEMAS OFFSHORE As principais diferenças entre as plataformas flutuantes e as fixas consistem na construção, transporte e instalação, tipos de carregamentos incidentes, as respostas a essa solicitação, e como são descomissionadas e reutilizadas no fim da sua vida útil de operação. O comum entre as mesmas são o espaço no convés e a capacidade de carga para suportar equipamento de perfuração e da planta de processamento e tratamento do gás, óleo e água. Como o foco do estudo são as plataformas flutuantes, são apresentados nos itens a seguir seus conceitos e componentes básicos. Inicia-se por uma descrição generalizada dos tipos de plataformas flutuantes e posterior comentário de seus elementos constituintes: o sistema de ancoragem, caracterizado pelo tipo de sistema, material da linha, configuração geométrica ao longo de sua profundidade; e risers, descritos pelo tipo e sua configuração geométrica. 5 2.1 Tipos de Plataforma Este capítulo consiste em detalhar as plataformas flutuantes atuantes no mercado de petróleo, e atualmente mais utilizadas devido ao cenário de exploração e perfuração de águas profundas. A Figura 2 ilustra os possíveis tipos de plataforma de produção de petróleo: Plataforma Jackup, Compliant Tower, Auto-Elevável, Tension Leg, Sea-Star, Spar, Semisubmerssível, FPSO e Fixa, da esquerda para a direita. Figura 2 - Tipos de Plataformas Offshore [2] Diferentemente das fixadas no solo marinho, as plataformas flutuantes quando alocadas na posição de projeto, próxima aos poços que deverão extrair e processar o óleo, são ancoradas e, por isso, denominadas estacionárias. Essa conexão é realizada através de cabos de aço ou correntes e cabos de poliéster, denominadas linhas de ancoragem do sistema flutuante. Apesar da variabilidade tecnológica e de engenharia das plataformas presentes no cenário atual, esse estudo só menciona as flutuantes mais comuns: SemiSubmersível e o FPSO (Floating, Production, Storage and Offloading – “Produção, armazenamento e descarga flutuante”). 2.1.1 Plataforma Semi-Submersível Esse tipo de plataforma é sustentado por flutuadores, denominados pontoons, os quais possuem a função de bombear água para dentro de seus lastros, alterando a flutuação da plataforma. Acima dos flutuadores, estão as colunas de sustentação que proporcionam a base ao convés e ao topside, que por sua vez, é onde se encontra a planta de separação e processo dos componentes extraídos do poço perfurado. 6 Essas plataformas podem ser de perfuração ou produção do petróleo. Por apresentar grande mobilidade, são excelentes opções para a perfuração de poços exploratórios. A P-55, ilustrada na Figura 3, é a maior plataforma desse tipo no Brasil. Entrou em produção no final de 2013, no Campo de Roncador (Bacia de Campos), ancorada a uma profundidade aproximada de 1.800 metros. Tem capacidade diária para processar 180 mil barris de petróleo e comprimir 4 milhões de m³ de gás natural. Figura 3 - P-55: A maior plataforma SS do Brasil [3] 2.1.2 FPSO Em meio a uma crise de oferta de petróleo, que demandava uma rápida produção dos campos recém-descobertos, o recurso encontrado foi converter navios petroleiros ou graneleiros. A conversão consiste na reutilização do casco e a instalação de módulos de processamento (separação e tratamento dos fluidos) no convés, transformando-os em unidades de produção. Uma das maiores vantagens dos FPSOs (Floating, Production, Storage and Offloading) é a presença de sistemas de processamento do gás no próprio topside e de armazenagem, sendo desnecessária a transferência frequente do óleo produzido para a costa. Além disso, por apresentar maior agilidade de construção, visto que se utiliza da conversão, estão dispostos para a produção mais rapidamente, antecipando o lucro. Ancorada em uma das maiores e desafiadoras profundidades de 2.120 metros do Brasil, o FPSO Cidade de Paraty da Petrobrás, demonstrada na Figura 4, entrou em produção no pré-sal da Bacia de Santos em junho de 2013.Tem capacidade de 7 processar diariamente 120 mil barris e comprimir 5 milhões de m³ de gás natural. Com experiência de mais de 30 anos na utilização desse tipo de plataforma, a Petrobras é a empresa que opera o maior número de FPSOs no mundo. Figure 1 - Um dos FPSOs com maior profundidade de exploração no Brasil [3] 8 2.2 Sistemas de Ancoragem 2.2.1 Tipos de Arranjo O dimensionamento do sistema de ancoragem deve levar em consideração a ação dos carregamentos ambientais nela atuante: vento, onda e correnteza do determinado local que a plataforma será posicionada. Atua como molas que produzem esforços capazes de restaurar a posição do flutuante quando é modificada pela ação ambiental. Ao avaliar as condições ambientais impostas, determina-se o tipo do sistema de ancoragem mais apropriado à plataforma, dentre os mais comuns: Single Point Mooring ou Spread Mooring (detalhados a seguir). Assim, podem-se enumerar os fatores determinantes para escolha do Sistema de Ancoragem: O tipo de plataforma. Geometria da plataforma flutuante. Direção e Intensidade dos carregamentos ambientais. O número de linhas de ancoragem e sua respectiva resistência são diretamente relacionados ao grau de intensidade das forças solicitantes. Para profundidades elevadas, como há um acréscimo do peso do casco e do número de risers necessários, o número de linhas é geralmente maior. Single Point Mooring System (“Sistema único de ancoragem”) Neste tipo de sistema de ancoragem, as linhas se concentram num ponto único do FPSO, denominado turret (“torre”), permitindo que o casco se alinhe às condições ambientais impostas no momento, processo denominado weathervaning. O turret, externo ou interno à plataforma, ilustrados nas Figura 4 e Figura 5, possibilita que ele gire em torno do seu eixo, adaptando-se às condições ambientais atuantes. 9 Figura 4 - Turret interno [4] Figura 5 - Turret externo [4] Spread Mooring System (“Sistema de ancoragem distribuído”) Esse tipo de sistema de ancoragem é caracterizado por ter linhas distribuídas por todo o casco. No caso do FPSO, elas são instaladas na proa e na popa, como pode ser visto na Figura 6. As forças de tração das linhas são projetadas de modo que sua resultante alinhe parcialmente a direção com a resultante das condições ambientais. Esse dimensionamento acarreta na minimização dos esforços no casco. Figura 6 - Spread Mooring System [5] 10 2.2.2 Composição das linhas de ancoragem As linhas de ancoragem podem ser compostas por cabos de aço, amarras, cabos sintéticos ou pela combinação destes. A escolha do tipo de material é relacionada ao tipo de configuração geométrica que o sistema de ancoragem terá. Normalmente as linhas são compostas por trechos inicial e final de cabo de aço ou amarras e cabo sintético (como poliéster) no trecho intermediário, para assim diminuir seu peso. Pode apresentar também, elementos auxiliares no projeto global como boiais e flutuadores. Amarras As amarras são elos de aço de seção circular, com ou sem malhete. A amarra com malhete é ilustrada na Figura 7. São classificadas quanto à sua resistência, e a escolha do grau de resistência depende da necessidade e do custo do projeto. Pode romper por ultrapassar a carga limite de ruptura ou à fadiga, esta última decorrente do movimento do casco flutuante. Em FPSOs, a vida útil à fadiga das amarras é relacionada principalmente à tração elevada. Figura 7 - Amarra de elo com malhete [6] Cabos de Aço Os cabos são compostos por fios de aço, denominados pernas, que por sua vez, são torcidas em volta de um espiral (termo técnico, pois na realidade é uma hélice). Sua composição pode ser observada na Figura 8. 11 As falhas por fadiga normalmente ocorrem nas extremidades e na proximidade ás âncoras. Sendo assim, são dimensionadas de acordo com a sua tração mínima de ruptura (MBL), dependente do tipo de aço e do diâmetro do cabo. Figura 8(a) - Composição Figura 8(b) - Exemplo Figura 8 - Cabo de Aço [7] Cabos Sintéticos Podem ser compostos de poliéster, aramida, HMPE ou poliamida. O cabo de poliéster é ilustrado na Figura 9 a seguir. Apresentam uma flexibilidade maior que o cabo de aço e das amarras, porém com a mesma carga axial de ruptura. Contém também uma baixa relação massa/resistência, boa resistência à fadiga e custo reduzido. Porém, possuem baixa resistência à abrasão (desgaste do material no contato com o solo), limitando sua utilização aos trechos sem contato com o solo. Figura 9 - Cabo de Poliéster [7] 12 2.2.3 Configurações Geométricas A relação diâmetro/comprimento das linhas implica que os efeitos de flexão são desprezíveis, considerando assim apenas sua rigidez axial. Entretanto, sua análise estrutural é complexa devido às não linearidades do conjunto e dos carregamentos hidrodinâmicos ambientais. Por isso, cada configuração geométrica deve ser analisada de forma peculiar e seus comprimentos e geometria calculados de acordo com cada projeto. Convencional Sua configuração é uma catenária convencional, onde apenas transmite esforços horizontais ao solo. As linhas devem ter comprimento suficiente para evitar o levantamento da âncora, mesmo considerando o rompimento de outra linha. Como demonstra a Figura 10, observam-se os componentes da catenária, o ângulo de topo, a curvatura e o TDP (Touch Down Point – “Ponto de contato com o solo”). A desvantagem do sistema é a necessidade de um raio grande de ancoragem, aproximadamente o triplo da lâmina d´água, o que ocasiona em uma possível interferência com outros risers ou linhas. Figura 10 - Catenária Convencional [8] Taut-Leg (“linhas retesadas”) As linhas formam aproximadamente um ângulo de 45° com a vertical, e com a vantagem de apresentar um raio de ancoragem menor que a configuração convencional. Proporciona ao sistema uma maior rigidez, proveniente da âncora que transfere esforço 13 vertical ao solo. Desta forma, esse sistema apresenta passeios limites do casco menores devido à rigidez de sua ancoragem, como pode ser observado na Figura 11. Entretanto, a configuração apresenta a desvantagem da necessidade da instalação de âncoras no solo que possam suportar as forças verticais solicitadas. Figura 11 - Comparação Catenária com Taut-Leg [9] 14 2.3 Tipos de risers O riser é definido como a tubulação que transfere o petróleo ou gás dos poços no fundo do mar para as plataformas de produção. Além disso, pode ter a função de injetar fluídos, como água e gás, no poço, facilitando a condução do oléo para a superfície. É, portanto, a interface entre a estrutura estática do fundo do mar e a estrutura dinâmica que é o casco e, por isso, necessita de uma análise estrutural detalhada de seu comportamento. A Figura 12 representa o tipo de riser utilizado no pré-sal brasileiro. Figura 12 - Modelos de Risers usados no Pré-Sal [3] Quanto à sua configuração geométrica, são classificados em: Vertical - o riser vertical se mantém sempre tracionado através de uma força de tração no seu topo, para deste modo, evitar a flambagem e possíveis danos estruturais. Catenária - configuração que requer um raio de curvatura mínimo, o que pode ocasionar em uma interferência com outros risers ou linhas de ancoragem. Porém, não necessita da força de tração no topo e possui uma carga distribuída ao longo do seu comprimento. Complexa - configuração desenvolvida recentemente para tecnologias e soluções inovadoras devido ao fato de se caracterizar como uma catenária dupla, através de flutuadores ou bóias submersas. Quanto ao seu tipo estrutural, são classificados em riser rígido ou flexível, descritos a seguir. 15 2.3.1 Riser Rígido (Steel Catenary Riser - SCR) Consiste em um tubo de aço e em uma solução para águas profundas, apresentando configuração de catenária. O riser rígido tem a capacidade de suportar pressões internas e externas extremas. Contudo, não possui significativa tolerância a movimentos do casco e possui elevado peso específico, gerando um esforço de tração excessivo no casco. O SCR é um tipo bastante comum na indústria do óleo e gás. Diferentemente das linhas de ancoragem em catenária, sua rigidez à flexão deve ser analisada em virtude do elevado momento fletor solicitante. Nas conexões com o casco, estes esforços são aliviados por conectores/juntas capazes de absorver parte deste momento. 2.3.2 Riser flexível Consiste em tubo de camadas de aço, com a finalidade de proteger o riser contra tração e pressão externa, intercaladas com camadas de polietileno. A utilização de várias camadas de aço proporciona flexibilidade ao riser, e as de polietileno permitem uma maior estanqueidade, proteção contra corrosão e evitam a abrasão. Entretanto, não apresenta resistência a pressões extremas, sendo preferível sua escolha em projetos de águas rasas. Figura 13 - Camadas do Riser Flexível [4] 2.3.3 Sistemas Híbridos Foram desenvolvidas novas tecnologias para águas profundas, e uma delas era combinar risers rígidos com flexíveis para assim obter suas vantagens operacionais e estruturais. O objetivo era combinar a resistência a pressões externas dos risers rígidos 16 e a flexibilidade dos risers flexíveis que suportam maior movimentação do casco e sua consequente fadiga. Um exemplo é a boia de sustentação de risers – BSR (Tethered Riser Buoy – “Boia tensionada dos risers”), ilustrada na Figura 14, uma combinação de seção rígida para a parte inferior e uma seção flexível para a superior. Os risers são conectados a uma boia ancorada por tendões tracionados, que por sua vez, estão vinculados ao solo por estacas. Esse sistema viabiliza o uso de risers Rígidos (SCR) em grandes profundidades. Figura 14 - Boia de Sustentação de risers – BSR [3] Outro exemplo são as Torres de risers, uma tecnologia desenvolvida para quando há necessidade de um número elevado de risers. Fornece uma flexibilidade por evitar um design conturbado e otimiza a performance de circulação do fluido para águas profundas por ter um acesso vertical ao poço. Figura 15 -Torre de Risers [3] 17 3 TIPOS DE CARREGAMENTO 3.1 Carregamentos Funcionais São fundamentais na obtenção da resposta estrutural, e consequentemente, no dimensionamento estrutural dos risers e linhas de ancoragem, como seu material, diâmetro, geometria e entre outros. Como exemplos de carregamentos funcionais têmse: peso próprio das linhas, pressão interna do fluido no riser, pressão hidrostática externa, tração no topo das linhas e inércia. 18 3.2 Carregamentos Ambientais As plataformas offshore estão sujeitas a carregamentos ambientais característicos de determinado local, que impõem uma resultante de forças na sua estrutura e nas linhas. Como exemplos de carregamentos ambientais têm-se: vento, força da onda, força das correntes. Nas plataformas flutuantes, esses carregamentos são responsáveis pela movimentação do casco, o que transfere esforços às linhas de ancoragem e risers, podendo violar seus respectivos critérios estruturais. Sua análise é então essencial para segurança e estabilidade do conjunto. A seguir é apresentada de maneira geral a descrição das forças aplicadas na estrutura oriundas das condições ambientais. 3.2.1 Onda O comportamento de uma onda do mar é descrito pelos seus principais parâmetros característicos: altura, período, comprimento de onda, elevação e velocidade de propagação. O estado de mar das ondas pode ser regular (ondas de mesma amplitude e frequência) ou irregular, sendo o último melhor representativo da realidade, pois é a superposição de ondas regulares. É baseado em medições e observações realizadas em uma determinada região e através delas, obtêm-se parâmetros estatísticos conhecidos como Período de Pico (TP) e Altura Significativa (Hs) para cada estado de mar. A partir dessas especificações, desenvolve-se uma formulação matemática denominada Problema de Valor de Contorno (PVC), onde se determinam as velocidades, acelerações, deslocamentos e pressões de fluido. Porém, esse problema é definido por ter componentes e forças de comportamento não linear e por isso, sua solução é através de iterações numéricas. 3.2.2 Corrente Impostas pela ação do vento na superfície do mar, pela variação da pressão atmosférica e pelos efeitos de maré, são forças que atuam nas linhas e no casco. São 19 representadas por perfis poligonais, em que as velocidades variam em sua magnitude e direção de incidência, dados em função da profundidade. 3.2.3 Vento A carga de vento atua na superfície do casco, e por isso, atuante na área exposta do casco. Possui parcela estática, constante ao longo do tempo baseada na velocidade média; e dinâmica, através de um espectro de vento e gera movimentos de baixa frequência (fundamental no dimensionamento de plataformas flutuantes). A força do vento é calculada baseada nos seus parâmetros, massa específica do ar, velocidade do vento e área exposta, obtidos através de medições no campo. O cálculo é feito segundo a fórmula da norma API RP 2A [11]. 20 4 PROJETO INTEGRADO ANCORAGEM X RISERS Tradicionalmente, o projeto dos sistemas de ancoragem e risers de uma plataforma são realizados separadamente por equipes distintas. Fixa-se, desde o início do projeto, um valor de passeio máximo da plataforma que deve ser mantido pelo sistema de ancoragem, como por exemplo, 10% da lâmina d’água. Em paralelo, o sistema de risers é projetado de maneira a não sofrer danos com o deslocamento da plataforma dentro desta região. Em muitos casos, o sistema de ancoragem projetado restringe os passeios da plataforma a valores inferiores ao limite estabelecido inicialmente, enquanto que o sistema de risers seria capaz de suportar passeios maiores. Esse problema, que é causado pela falta de integração entre os dois projetos, pode ficar ainda mais acentuado no caso de sistemas de risers assimétricos. Nesse caso, a plataforma poderia passear mais para uma direção do que para outras sem danificar o sistema de risers. Com isso, o sistema de ancoragem poderia ser dimensionado de maneira a considerar essa característica, melhorando sua eficiência. Ao longo dos últimos anos, há uma tendência de integração entre os dois projetos. Inicialmente são gerados diagramas que demarcam as zonas de operação seguras para os risers (ZOR). Em seguida, o sistema de ancoragem é projetado de maneira a respeitar os limites de passeio estabelecidos pela ZOR. Essa metodologia é descrita com detalhes nos itens a seguir. 21 4.1 Conceitos Gerais de Projeto O projeto da ancoragem deve ser desenvolvido com o propósito de garantir que o passeio da unidade flutuante, mesmo sob condições ambientais extremas, não danifique a estrutura dos risers conectados ao casco. O passeio é a denominação dada à distância horizontal que a unidade percorre desde a sua posição de equilíbrio neutro até a posição de equilíbrio sob o carregamento ambiental. Normalmente, este passeio é medido como um percentual da lâmina d’água. Tecnicamente, o passeio da plataforma flutuante é proporcional à rigidez do conjunto, que representa a capacidade de resistência à deformação ao deslocamento imposto pelas forças ambientais aplicadas. Sendo assim, depende do material (mais especificamente seu módulo de elasticidade) e do arranjo do sistema de ancoragem e dos risers. Já os risers devem ser analisados para assegurar níveis aceitáveis de deformações, tensões e resistência à fadiga, devido às forças impostas pelas correntes, ondas e movimentos do casco. A pressão hidrostática interna (fluido) e a externa (água do mar) são também fundamentais nas análises. Para monitorar os esforços e as deformações impostas às linhas, são realizadas análises estruturais que dependem de ferramentas de simulação numérica. O mecanismo de análise computacional do comportamento estrutural dos elementos é o modelo matemático, construído com base no Método dos Elementos Finitos. Além disso, as linhas e risers apresentam um comportamento não linear geométrico, devido a grandes deslocamentos, e físico, devido à relação entre materiais que apresentam comportamento não-linear na sua relação tensão x deformação. Por isso, a resposta dinâmica das linhas deve ser feita pela análise no domínio tempo, em que se ponderam todas as não linearidades do sistema. A posição das linhas é atualizada, recalculando cada termo de massa, amortecimento e rigidez, a cada intervalo de tempo. Por esse motivo, necessita de um tempo de processamento computacional maior. 22 4.2 Zona Operacional dos Risers – ZOR A Zona Operacional dos Risers - ZOR - é a denominação da envoltória dos passeios limites da plataforma sujeita a carregamentos ambientais, que não violam nenhum critério estrutural dos risers. Ou seja, é a zona segura representada em um diagrama, em que a plataforma pode se deslocar, sem causar dano estrutural nos risers. A primeira etapa consiste em aplicar no topo dos risers deslocamentos prescritos para cada direção, representando o deslocamento da plataforma flutuante. Com a aplicação dos deslocamentos juntamente com o peso próprio dos risers e os carregamentos da correnteza, realiza-se uma análise estática não-linear. A partir dos resultados, os critérios estruturais dos risers são verificados até que algum seja violado. O passeio limite é, portanto, o deslocamento anterior ao violado. Posteriormente, procede as denominadas simulações dinâmicas, na qual introduz-se os carregamentos de onda, que solicitam mais a estrutura do riser. A partir do deslocamento limite encontrado na etapa anterior, diminui-se gradativamente até o deslocamento máximo e seguro em que o critério estrutural deixe de ser violado. A vantagem de se realizar uma análise estática antes é que a mesma possui um tempo computacional bem reduzido, e que proporciona o limite de deslocamento da plataforma flutuante. Assim, já possuindo uma aproximação do passeio de falha, são necessárias menos simulações dinâmicas e menos tempo para sua execução para encontrar o deslocamento de segurança. Deste modo, obtendo o deslocamento de segurança limite para cada direção um diagrama é elaborado, no qual as curvas limitam a zona segura de utilização dos risers, onde todos os critérios são assegurados. O objetivo da elaboração da ZOR, ilustrada na Figura 16, é obter conclusões sobre possíveis alterações no projeto de risers que possam aprimorar e otimizar o desempenho do sistema, além de proporcionar a integração com o sistema de ancoragem que poderia ser dimensionado de maneira a manter a plataforma dentro dessa zona de segurança. 23 Figura 16 - Exemplo de ZOR [12] Para a elaboração da ZOR, devem ser considerados e avaliados 3 parâmetros de projeto: as direções, as combinações dos carregamentos e os critérios estruturais. Como mencionado acima, o procedimento de deslocamento do topo dos risers é realizado para cada direção do diagrama polar, sendo no mínimo 16 direções. A distância das novas posições é usualmente representada de acordo com a porcentagem da lâmina d´água de projeto, aumentando-as em um processo progressivo para atingir a violação de algum critério estrutural, e consequentemente, seu deslocamento limite. Normalmente, considera-se o mesmo número de combinações dos carregamentos ambientais e das direções de incidência dos deslocamentos. Devem-se considerar também combinações ambientais alinhadas e desalinhadas com as direções dos deslocamentos na análise do diagrama da ZOR. Por exemplo, a correnteza na direção sul deve ser avaliada na análise do deslocamento tanto para o sul, quanto para sudeste e sudoeste. Dados os resultados das análises dos deslocamentos, os risers são verificados quanto a seus critérios estruturais, evitando qualquer tipo de falha mecânica ou ruptura. Os principais requisitos que devem ser considerados são segurança, risco e confiabilidade, e considerações funcionais, operacionais, estruturais e do material. Os risers rígidos podem apresentar falha devido a: Plastificação do material. Flambagem localizada do riser. 24 Colapso hidrostático; pressão externa do projeto deve ser menor que a pressão de colapso para evitar o esmagamento do riser. Já os risers flexíveis possuem uma maior probabilidade de falha devido a suas diversas camadas: Falha da armadura de pressão, ocasionada por pressões internas ou externas elevadas, com ou sem tração elevada. Ruptura das armaduras de pressão ou tração devido ao elevado esforço axial. Flambagem das armaduras de tração devido à falha por compressão ou por torção. Ruptura da armadura de pressão ou da camada externa ocasionada pela flexão excessiva. Para evitar as falhas mencionadas acima, recomenda-se atender critérios estruturais dos risers flexíveis e rígidos no estudo da ZOR, abaixo dos valores limites. São eles: Interferência; É necessário evitar o contato do riser com outro elemento, como linhas de ancoragem, Casco ou outro riser. Tração na conexão de fundo; cada tipo de riser, dependendo de seu diâmetro, de sua seção transversal e de sua armadura de tração de projeto, possui uma tração limite de conexão com o manifold ou com a flowline. Variação limite do ângulo de topo; a variação a partir do ângulo inicial no topo deve ser menor que a limitada. Tração de topo; assim como no fundo, a tração deve ser menor que o limite estabelecido pelo fabricante para cada tipo de riser. Compressão; O riser não é dimensionado para resistir a compressão, para evitar uma possível falha por flambagem localizada. Comprimento mínimo apoiado no fundo; O riser deve ser dimensionado para um comprimento apoiado mínimo, com objetivo de evitar trações verticais nas conexões com certa margem de segurança. Além desses, cada tipo de riser possui um critério de verificação específico. Para os risers rígidos, é: 25 Tensão de Von Misses; É a tensão combinada dos esforços solicitados no riser de tração, flexão e torção que deve ser menor que a admissível, dependentes da tensão de escoamento do aço Para os risers flexíveis, são: Raio mínimo de curvatura; o raio de curvatura não deve ultrapassar o MBR (Minimium Bend Radius) estabelecido pelo fabricante. Tensão nas armaduras de tração; a armadura de tração do riser é dimensionada para resistir aos esforços de tração e pressão, com uma tensão de tração limite de acordo com a tensão de escoamento do aço. Torção limite: A torção solicitada deve ser abaixo da admissível para evitar uma possível falha na armadura de tração por flambagem localizada. 26 4.3 Diagrama de Offsets O diagrama de offsets é a denominação da envoltória dos passeios máximos da plataforma em várias direções sujeita a carregamentos ambientais. É necessário considerar combinações ambientais extremas, ou seja, com períodos de retorno decenários e centenários, e combinações alinhadas e desalinhadas. Diferentemente das simulações realizadas anteriormente nos risers para calcular a ZOR, onde o deslocamento da plataforma foi prescrito, agora a plataforma é livre para se deslocar com a atuação dos carregamentos. Isso significa que, mesmo sendo aplicados carregamentos alinhados, a plataforma se desloca na direção de acordo com a rigidez do sistema, não necessariamente em linha reta. A Figura 17 apresenta um exemplo de diagrama de offsets. Os modelos de análise do sistema de ancoragem devem considerar uma configuração global da plataforma, com a contribuição dos risers utilizados na geração da ZOR. Figura 17 - Diagrama de Offsets [12] Cabe ressaltar que os critérios de projeto para as linhas de ancoragem (como tração, interferência, atrito com o solo, entre outros) devem ser atendidos dentro de toda a região limitada pelo diagrama de offsets. 27 Os diagramas de offset podem ser obtidos para duas condições distintas: Sistema Intacto e Sistema de Avaria. Após a elaboração do diagrama de offsets no sistema intacto, resultante da atuação dos carregamentos ambientais extremos, elaborase outro diagrama, repetindo o processo, porém considerando a ruptura de uma linha de ancoragem. 28 4.4 Cruzamento do Diagrama de offsets com a ZOR No processo integrado do projeto, o diagrama de offsets e a ZOR são sobrepostos. O cruzamento tem o propósito de verificar que os limites máximos de passeio do casco não ultrapassem a zona segura de operação dos risers. Um exemplo de cruzamento dos diagramas pode ser observado na Figura 18. Deste modo, é possível avaliar as direções e consequentes combinações ambientais que excedem o limite da ZOR e que infringem os critérios estruturais dos risers. As devidas modificações necessárias devem ser realizadas de forma que garanta a segurança do sistema, limitando os offsets para dentro da área segura estipulada pelos risers. Por outro lado, se os limites do diagrama e da ZOR estiverem muito afastados significa que há um superdimensionamento do sistema de ancoragem, permitindo uma reavaliação do projeto para soluções mais econômicas. Deve ser considerada também, a situação de avaria do sistema de ancoragem, garantindo a segurança da plataforma em situações acidentais de possível rompimento das linhas. Figura 18 - Superposição do Diagrama de Offsets e a ZOR [12] 29 5 ESTUDO DE CASO 5.1 Introdução O presente estudo de caso tem como objetivo exemplificar o dimensionamento da Zona de Operação dos Risers (ZOR) de uma plataforma flutuante de petróleo, para um futuro projeto de integração ao sistema de ancoragem. Como mencionado na Seção 4.2, a geração da ZOR considera a aplicação de carregamentos estáticos e dinâmicos. Entretanto, neste estudo será levado em conta como carregamento ambiental a ação da correnteza e por esse motivo, apenas será abordada a análise estática do sistema de risers. Dessa maneira, pode-se descrever o processo de estudo como uma simplificação do procedimento de elaboração da ZOR. Será utilizado no trabalho para a análise do sistema de risers o programa PROSIM/SITUA, desenvolvido desde 1997 pelo Laboratório de Métodos Computacionais e Sistemas Offshore da COPPE – LAMCSO em parceria com a Petrobras. O programa executa análises estáticas e dinâmicas não-lineares no domínio do tempo, considerando o acoplamento entre o comportamento hidrodinâmico do casco de unidades flutuantes e o comportamento estrutural-hidrodinâmico das linhas de ancoragem e risers, representadas por elementos finitos [13]. É fundamental ressaltar que o objetivo de estudo é a elaboração da ZOR, e sendo assim, possui o foco no projeto dos risers da plataforma flutuante. As posteriores etapas de integração ao sistema de ancoragem não terão sua concepção no estudo. 30 5.2 Descrição do Modelo O modelo utilizado no estudo é composto por 18 risers flexíveis, com distribuição assimétrica, representativos de um caso real, localizado numa lâmina d’água de 620 metros. As Figura 19 e Figura 20 ilustram de maneira mais adequada o modelo do sistema de risers estudado. A análise do sistema foi realizada no software SITUA-Prosim, cujos risers são representados por elementos finitos de pórtico. O MEF é de elevada importância no estudo do comportamento dos risers, pois esses requerem uma análise mais detalhada de sua resposta estrutural. As propriedades dos risers são observadas na Tabela 1. Figura 19 - Vista 3D do modelo 31 Figura 20 - Vista superior do Modelo Tabela 1 - Propriedades dos Risers Riser Nome Diâmetro (in) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 INJEÇÃO PRODUÇÃO PRODUÇÃO INJEÇÃO PRODUÇÃO INJEÇÃO PRODUÇÃO INJEÇÃO INJEÇÃO DE GÁS PRODUÇÃO INJEÇÃO PRODUÇÃO INJEÇÃO PRODUÇÃO INJEÇÃO PRODUÇÃO INJEÇÃO EXPORTAÇÃO 2.5 4 4 2.5 4 2.5 4 2.5 7.625 4 2.5 4 4 4 4 4 2.5 11.25 32 5.3 Casos de Carregamentos Como este estudo de caso contempla a geração da ZOR estática, foram considerados apenas carregamentos de correnteza. As correntes, representativas de mares brasileiros, foram definidas nas 16 direções: Norte, Nor-Nordeste, Nordeste, ÉsNordeste, Leste, És-Sudeste, Sudeste, Su-Sudeste, Sul, Su-Sudoeste, Sudoeste, OésSudoeste, Oeste, Oés-Noroeste, Noroeste, Nor-Noroeste. A Tabela 2 especifica os valores das velocidades das correntes na superfície relacionados às suas direções de incidência. Tabela 2 - Velocidades das Correntes Eixo Global N NNE NE ENE E ESE SE SSE S SSW SW WSW W WNW NW NNW Correnteza (m/s) 1,05 1,15 1,25 1,16 1,06 1,03 1,1 1,51 1,67 1,5 1,33 1,46 1,59 1,34 1,09 1,07 No programa SITUA-Prosim, as correntes foram especificadas, uma a uma, quanto a sua direção de incidência e sua velocidade. Elas possuem a configuração triangular ao longo da profundidade, como exemplificado na Figura 21 para a corrente na direção Nordeste. 33 Figura 21 – Exemplo da configuração triangular da corrente As combinações dos carregamentos considerados no estudo se deram pela associação dos deslocamentos alinhados com a correnteza, ou seja, ambos na mesma direção. A análise, portanto, envolveu uma matriz de 16 combinações. 34 5.4 Critério de Projeto dos Risers Como o modelo adotado para este estudo de caso é composto apenas por risers flexíveis, os valores dos critérios de projeto são estabelecidos pelos próprios fabricantes. De acordo com o que foi mencionado na Seção 5.1, o objetivo deste estudo de caso é exemplificar o dimensionamento de uma Zona de Operação dos Risers (ZOR). Dessa maneira, apenas os principais critérios de projeto foram avaliados, dentre aqueles apresentados na Seção 4.2. Os critérios avaliados encontram-se listados a seguir: Obtidos dos fabricantes: Tração máxima ao longo do riser. Compressão nula. Estimados: Tração máxima na conexão de fundo do riser. Interferência nula entre os risers. Mínimo raio de curvatura (MBR - Minimum Bend Radius). Comprimento mínimo apoiado do riser. Os valores limites utilizados no estudo encontram-se detalhados na Tabela 3. 35 Tabela 3 - Critério de Utilização dos risers Riser Diâmetro (in) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 2,5 4 4 2,5 4 2,5 4 2,5 7,625 4 2,5 4 4 4 4 4 2,5 11,25 Critérios de Utilização limites Tração Topo (kN) Tração Fundo (kN) Raio Mínimo de Curvatura (m) 870 200 5 1260 200 10 1260 200 10 870 200 5 1260 200 10 870 200 5 1260 200 10 870 200 5 3500 300 10 1260 200 10 870 200 5 1260 200 10 1260 200 10 1260 200 10 1260 200 10 1260 200 10 870 200 5 7500 700 10 36 5.5 Resumo dos Resultados da ZOR Foram elaborados dois diagramas de Zonas Operacionais dos Risers, com e sem a solicitação do carregamento das correntes. Tal procedimento foi realizado com o propósito de uma possível posterior comparação entre os diagramas, e assim a verificação da influência da carga da corrente no conjunto. Portanto, os diagramas da ZOR finais obtidos são apresentados nas Figura 22 e Figura 23. As Tabela 4 e Tabela 5 indicam para cada direção de incidência, quais os critérios foram desrespeitados, os valores dos critérios atendidos, quais os risers que tiveram seus critérios desrespeitados e os passeios limites da plataforma. Figura 22 - ZOR sem carregamento ambiental 37 Figura 23 - ZOR com carregamento ambiental Tabela 4 - Violações da ZOR sem carregamento ambiental Deslocamentos Máximos para ZOR estática sem carregamento ambiental Direção Limite ZOR (m) Riser 1 N 125 9 2 3 4 5 6 7 8 9 10 11 12 13 14 NNE NE ENE E ESE SE SSE S SSW SW WSW W WNW 45 30 30 55 80 100 120 110 95 85 80 70 70 2 2 2 2 7 7 8 com 7 7 com 8 13 13 com 14 13 com 14 13 com 14 13 com 14 15 NW 115 3 16 NNW 185 16 Critério Violado Comprimento mínimo apoiado Raio de Curvatura Raio de Curvatura Raio de Curvatura Raio de Curvatura Raio de Curvatura Raio de Curvatura interferência interferência Raio de Curvatura interferência interferência interferência interferência Comprimento mínimo apoiado Comprimento mínimo apoiado 38 Valor do Critério não violado Porcentagem da Lâmina d´água (% ) - 20,2 9,4 9,8 9,8 9,5 9,9 9,7 9,5 - 7,3 4,8 4,8 8,9 12,9 16,1 19,4 17,7 15,3 13,7 12,9 11,3 11,3 - 18,5 - 29,8 Tabela 5 - Violações da ZOR com carregamento ambiental Deslocamentos Limites para ZOR estática com carregamento ambiental Direção Limite ZOR (m) Riser 1 N 115 9 2 3 4 5 6 7 8 9 10 11 12 13 14 NNE NE ENE E ESE SE SSE S SSW SW WSW W WNW 40 30 35 50 75 90 90 80 80 80 70 60 65 2 2 2 2 7 7 7 com 8 7 com 8 13 13 com 14 13 com 14 13 com 14 13 com 14 15 NW 115 3 16 NNW 185 16 Critério Violado Valor do Critério violado Porcentagem da Lâmina d´água (% ) - 18,5 9,5 9,1 8,3 9,8 9,4 9,7 9,4 - 6,5 4,8 5,6 8,1 12,1 14,5 14,5 12,9 12,9 12,9 11,3 9,7 10,5 - 18,5 - 29,8 Comprimento mínimo apoiado Raio de Curvatura Raio de Curvatura Raio de Curvatura Raio de Curvatura Raio de Curvatura Raio de Curvatura interferência interferência Raio de Curvatura interferência interferência interferência interferência Comprimento mínimo apoiado Comprimento mínimo apoiado A Figura 24 demonstra a comparação entre os diagramas da análise estática com e sem carregamento ambiental, possibilitando uma avaliação visual entre os mesmos. Figura 24 - Comparação entre as ZORs 39 Equiparando os resultados obtidos, é possível estabelecer que para as direções Su-Sudeste e Sul a influência do carregamento ambiental foi maior. A aplicação dos carregamentos ambientais de correnteza ocasionou uma redução no passeio limite de 25% e 27,3%, respectivamente. Em oposição, para a direção Nordeste, foi verificado que não houve diferença nos resultados obtidos. Isso pode ser justificado pelo fato do critério ter sido violado com um passeio muito pequeno da plataforma, que tem influência muito mais significativa nos resultados que a aplicação do carregamento ambiental propriamente dito. Nas direções restantes, percebe-se que os deslocamentos máximos são próximos incluindo ou não o carregamento ambiental. O critério não atendido para tais direções é o mesmo em ambos os diagramas, sendo em sua a maioria a interferência entres os risers e o raio de curvatura mínimo. 40 5.6 Resultados Detalhados A seguir, apresenta-se uma análise mais detalhada dos resultados da ZOR para cada direção de incidência, e em qual deslocamento seus critérios estruturais são desrespeitados. 5.6.1 Direção Norte A plataforma flutuante teve seu movimento prescrito para o Norte, como demonstra a Figura 25. (a) – Vista 3D (b) – Vista Superior Figura 25 - Direção Norte Para esta direção, observa-se através da Tabela 6, a violação do comprimento mínimo apoiado no solo do riser 9 que deve ser evitado para não provocar uma força vertical no fundo. Pode-se observar também que se este critério fosse atendido, o deslocamento limite da ZOR seria por volta do dobro do valor obtido. Tabela 6 - Direção Norte Direção 1 N Limite ZOR (m) Riser Critério Violado 205 240 16 17 115 9 Tração no fundo Tração no topo Comprimento mínimo apoiado 41 Valor do Critério não violado 183 673 Porcentagem da Lâmina d´água (% ) 33,1 38,7 - 18,5 Nas Figura 26 e Figura 27, pode-se observar o comprimento mínimo apoiado sendo respeitado. Figura 26 - Deslocamento limite Figura 27 – Comprimento mínimo apoiado 42 5.6.2 Direção Nor-Nordeste A unidade foi deslocada para a direção Nor-Nordeste, como mostra a Figura 28. (a) –Vista 3D (b) –Vista Superior Figura 28 - Direção Nor-Nordeste A partir das Figuras acima, verifica-se que o movimento ocorre na direção dos risers 1 e 2, e deste modo, se curvam de maneira crítica à sua segurança estrutural. Este critério é violado no riser 2, como demonstra a Tabela 8, a uma posição de 40 metros. A Tabela 7, comprova que se não fosse pela violação do MBR, a plataforma seria capaz de possuir deslocamentos bem menos restritos. Tabela 7 - Direção Nor-Nordeste Direção 2 NNE Limite ZOR (m) Riser Critério Violado 200 16 155 16 40 145 2 3 com 4 Tração no fundo Comprimento mínimo apoiado Raio de Curvatura interferência Valor do Critério não violado 185 Porcentagem da Lâmina d´água (% ) 32,3 - 25,0 9,5 - 6,5 23,4 Tabela 8 - Violação Direção Nor-Nordeste NNE MBR (m) 45m 40m 9.5m 10,3 Riser 2 43 Limite 10 m Através das Figura 29 e Figura 30 é possível verificar quando o riser 2 se encontra no valor seguro de operação. Figura 29 – Deslocamento limite Figura 30 - MBR não violado 5.6.3 Direção Nordeste O deslocamento para direção Nordeste respresenta-se pela Figura 31: 44 (a) –Vista 3D (b) –Vista Superior Figura 31 -Direção Nordeste Para esta direção de deslocamento, o critério de cautela continua sendo o raio de curvatura mínimo para o riser 2 e sua posição limite é de 30 metros, proporcional a aproximadamente 5% da lâmina d´água. A Tabela 10 comprova a violação do critério no passo seguinte. Se o riser tivesse o MBR atendido, o passeio limite teria o triplo do valor obtido, como demonstra a Tabela 9. Tabela 9 - Direção Nordeste Direção 3 Limite ZOR (m) Riser Critério Violado 250 205 11 9 90 9 30 110 2 3 com 4 Tração no topo Tração no fundo Comprimento mínimo apoiado Raio de Curvatura interferência NE Valor do Critério violado 850 291 Porcentagem da lâmina d´água (% ) 40.3 33.1 - 14.5 9.1 - 4.8 17.7 Tabela 10 - Violação Direção Nordeste NE MBR (m) 35m 30m 9,1 10,7 Riser 2 Limite 10 m As Figura 32 e Figura 33 demonstram a curvatura do riser 2 superior ao limite mínimo estabelecido. 45 Figura 32 – Deslocamento limite Figura 33 - MBR não violado 5.6.4 Direção És-Nordeste No programa Situa, o movimento prescrito na direção És-Nordeste é representado pela Figura 34: 46 (a) –Vista 3D (b) –Vista Superior Figura 34 - direção És-Nordeste O deslocamento máximo para essa direção é de 35 metros e o riser que merece precaução continua sendo o riser 2, pois percebe-se que ele passa a ter uma curvatura além de seu valor crítico na Tabela 12. Observa-se também, na Tabela 11, um significativo aumento de 60 metros no passeio limite da plataforma se o MBR fosse atendido. Tabela 11 - Direção És-Nordeste Direção 4 Limite ZOR (m) Riser Critério Violado 215 9 95 9 35 115 2 3 com 4 Tração no fundo Comprimento mínimo apoiado Raio de Curvatura interferência ENE Valor do Critério não violado Porcentagem da Lâmina d´água (% ) 290 34,7 - 15,3 8,3 - 5,6 18,5 Tabela 12 - Violação Direção És-Nordeste ENE MBR (m) 40m 35m 8,3 10,9 Riser 2 Limite 10 m As Figura 35 e Figura 36 demonstram a curvatura do riser 2 no passo em que seu critério não é violado. 47 Figura 35 – Deslocamento limite Figura 36 – MBR não violado 5.6.5 Direção Leste O movimento prescrito na direção leste deu-se pela Figura 37: 48 (a) –Vista 3D b) –Vista Superior Figura 37 - Direção Leste O passeio limite para esta direção foi caracterizada por 50 metros e seu critério de violação dos risers foi também o MBR para o riser 2, comprovado na Tabela 14. Pode-se determinar então que, através da Tabela 13, se o raio mínimo fosse atendido, o deslocamento limite aumentaria significativamente e seria proporcional a 18,5% da lâmina d´água do projeto. Tabela 13 - Direção Leste Direção 5 E Limite ZOR (m) Riser Critério Violado 215 265 18 18 115 9 50 145 2 3 com 4 Tração no fundo Tração no topo Comprimento mínimo apoiado Raio de Curvatura interferência Valor do Critério não violado 653 7148 Porcentagem da Lâmina d´água (% ) 34,7 42,7 - 18,5 9,8 - 8,1 23,4 Tabela 14 - Violação Direção Leste E MBR (m) 55m 50m 9,8 10,4 Riser 2 Limite 10m As Figura 38 e Figura 39 abaixo comprovam o deslocamento limites para a direção Leste. 49 Figura 38 – Deslocamento limite Figura 39 – MBR não violado 5.6.6 Direção És –Sudeste Para esta direção, o movimento foi representado pela Figura 40: 50 (a) –Vista 3D (b) –Vista Superior Figura 40 - Direção És-Sudeste Para a direção És–Sudeste, o critério violado continua sendo o raio de curvatura mínimo, porém como comprova a Tabela 16 , para uma distância maior de 75 metros. Através da Tabela 15, observa-se que o riser 7 tem seu raio não atendido, restringindo bastante o passeio limite se comparado com o próximo critério violado. Tabela 15 - Direção És –Sudeste Direção 6 Limite ZOR (m) Riser Critério Violado 205 250 18 18 170 9 75 7 Tração no fundo Tração no topo Comprimento mínimo apoiado Raio de Curvatura ESE Valor do Critério não violado Porcentagem da Lâmina d´água (% ) 673 6571 33,1 40,3 - 27,4 9,4 12,1 Tabela 16 - Violação Direção És –Sudeste ESE MBR (m) 80m 75m 9,4 12,2 Riser 7 Limite 10m As Figura 41 e Figura 42 demonstram a conclusão anterior, onde o riser ainda opera em segurança. 51 Figura 41 – Deslocamento limite Figura 42 – MBR não violado 5.6.7 Direção Sudeste No modelo do SITUA, o deslocamento é visto como na Figura 43: 52 (a) –Vista 3D (b) –Vista Superior Figura 43 - Direção Sudeste A posição limite para esta direção é de 90 metros, e seu critério de violação continua sendo o MBR do riser 7, demonstrada na Tabela 18 . Para esta direção observa-se na Tabela 17, uma menor diferença de passeios limites, se comparado ao próximo critério violado. Tabela 17 - Direção Sudeste Direção 7 Limite ZOR (m) Riser Critério Violado 215 265 90 105 18 18 7 1 com 2 Tração no fundo tração no topo Raio de Curvatura interferência SE Valor do Critério não violado 667 5566 9,7 - Porcentagem da Lâmina d´água (% ) 34,7 42,7 14,5 16,9 Tabela 18 - Violação Direção Sudeste SE MBR (m) 95m 90m 9,7 10,8 Riser 7 Limite 10m As Figura 44 e Figura 45 comprovam a curvatura dentro da zona de segurança do riser. 53 Figura 44 – Deslocamento limite Figura 45 - MBR não violado 5.6.8 Direção Su-Sudeste Para a direção Su-Sudeste o modelo teve o movimento prescrito na Figura 46 do modo que: 54 (a) –Vista 3D (b) –Vista Superior Figura 46 - Direção Su-Sudeste Para esta direção, verifica-se um passeio limite de 90 metros devido à interferência entre os risers 7 e 8. Porém, deve-se observar pela Tabela 19, que ocorre também interferência entre os riser 15 e 16 a uma posição de 55 metros mais distante, ou seja, um maior deslocamento seguro de operação. Tabela 19 - Direção Su-Sudeste Direção 8 SSE Limite ZOR (m) 250 190 90 145 Riser Critério Violado 8 Tração no fundo 14 Raio de Curvatura 7 com 8 interferência 15 com 16 interferência Valor do Critério não violado 672 9,6 - Porcentagem da Lâmina d´água (% ) 40,3 30,6 14,5 23,4 A Figura 47 demonstra a iminência da interferência no momento da ZOR limite, porém percebe-se a posição de sua violação na Figura 48. 55 Figura 47 – Deslocamento limite Figura 48 – Interferência violada 5.6.9 Direção Sul O movimento na direção sul foi representado na Figura 49: 56 (a) –Vista 3D (b) –Vista Superior Figura 49 - Direção Sul A distância limite obtida foi de 80 metros, apontada na interferência entre os risers 7 e 8, assim como na direção anterior. Na Tabela 20, percebe-se que se a interferência não ocorresse, o MBR do riser 13 limitaria a plataforma a um deslocamento por volta de 19% maior. Tabela 20 - Direção Sul Direção 9 S Limite ZOR (m) Riser 250 1 95 80 13 7 com 8 Critério Violado Comprimento mínimo apoiado Raio de Curvatura interferência Valor do Critério não violado Porcentagem da Lâmina d´água (% ) - 40,3 9,4 - 15,3 12,9 As Figura 49 e Figura 52 ilustram a ocorrência da interferência no sistema de risers estudado. 57 Figura 50 - Deslocamento limite Figura 51 - Interferência violada 58 5.6.10 Direção Su-Sudoeste A Figura 52 demonstra o movimento prescrito na direção Su-Sudoeste: (a) –Vista 3D (b) –Vista Superior Figura 52 - Direção Su-Sudoeste Para o deslocamento de 80 metros, o critério de mínimo raio de curvatura foi violado para o riser 13. A Tabela 22 demonstra o momento de rompimento do critério. Se o MBR do riser 13 fosse maior, o deslocamento limite da plataforma aumentaria em 40 metros, como aponta a Tabela 21. Tabela 21 - Direção Su-Sudoeste Direção 10 Limite ZOR (m) Riser 215 1 80 120 13 7 com 5 SSW Critério Violado Valor do Critério não violado Porcentagem da Lâmina d´água (% ) - 34,7 8,3 - 12,9 19,4 Comprimento mínimo apoiado Raio de Curvatura interferência Tabela 22 - Violação Direção Su-Sudoeste SSW MBR (m) 85m 80m 8,3 10,5 Riser 13 Limite 10m As Figura 53 e Figura 54 exemplificam quando o MBR se encontra dentro do limite estimado. 59 Figura 53 – Deslocamento limite Figura 54 - MBR não violado 5.6.11 Direção Sudoeste O movimento na Figura 55 dado à plataforma na direção Sudoeste foi tal que: 60 (a) –Vista 3D (b) –Vista Superior Figura 55 - Direção Sudoeste A interferência entre os risers 13 e 14 ocorreu na posição de 80 metros, como comprovam as Figura 56 e Figura 57 . Pode-se observar na Tabela 23, que se a interferência entres os risers fosse solucionada, o deslocamento limite seria por volta de 40% maior. Tabela 23 - Direção Sudoeste 61 Direção 11 SW Limite ZOR (m) Riser 275 1 215 110 80 Critério Violado Valor do Critério não violado Porcentagem da Lâmina d´água (% ) 189 44,4 - 34,7 9,9 - 17,7 12,9 Tração no fundo Comprimento 1 mínimo apoiado 9 Raio de Curvatura 13 com 14 interferência Figura 56 – Deslocamento limite 62 Figura 57 – Interferência violada 5.6.12 Direção Oés-Sudoeste A direção Oés-Sudoeste foi caracterizada pela Figura 58: (a) –Vista 3D (b) –Vista Superior Figura 58 - Direção Oés-Sudoeste 63 Através da Tabela 24 percebe-se que a interferência entre os risers 13 e 14 ocorre bem antes da violação de qualquer outro critério. Se o critério violado fosse atendido, a plataforma poderia se deslocar seguramente por mais 110 metros nessa direção. Tabela 24 - Direção Oés-Sudoeste Direção 12 Limite ZOR (m) Riser 245 3 WSW 100 180 70 Critério Violado Tração no fundo Comprimento 3 mínimo apoiado 10 Raio de Curvatura 13 com 14 interferência Valor do Critério não violado 184 Porcentagem da Lâmina d´água (% ) - 16,1 9,5 - 29,0 11,3 39,5 As Figura 59 e Figura 60 comprovam a interferência entres os risers na ZOR limite de 70 metros: Figura 59 – Deslocamento limite 64 Figura 60 – Interferência violada 5.6.13 Direção Oeste A direção Oeste é dada pela Figura 61: (a) –Vista 3D (b) –Vista Superior Figura 61 - Direção Oeste Nesta direção, a posição limite foi ocasionada por interferência, também entre os risers 13 e 14. A Tabela 25, pode demonstrar que se não houvesse interfereência do limite da ZOR seria 58% maior. 65 Tabela 25 - Direção Oeste Direção 13 W Limite ZOR (m) Riser 220 275 3 4 95 185 60 Critério Violado Valor do Critério não violado Porcentagem da Lâmina d´água (% ) 196 825 35,5 44,4 - 15,3 9,5 - 29,8 9,7 Tração no fundo Tração no topo Comprimento 3 mínimo apoiado 18 Raio de Curvatura 13 com 14 interferência As Figura 62 – Deslocamento limitee Figura 63 – Interferência violadapodem comprovar as conclusões citadas. Figura 62 – Deslocamento limite 66 Figura 63 – Interferência violada 5.6.14 Direção Oés-Noroeste O movimento prescrito nessa direção foi caracterizado pela Figura 64: (a) –Vista 3D (b) –Vista Superior Figura 64 - Direção Oés-Noroeste 67 O deslocamento limite para esta direção deu-se por 65 metros, na violação também da interferência entre os risers 13 e 14. A Tabela 26, aponta os possíveis deslocamentos limites da plataforma se o sistema de risers não tivesse interferência entre si. Tabela 26 - Direção Oés-Noroeste Direção 14 WNW Limite ZOR (m) Riser 220 255 3 6 95 125 65 Critério Violado Valor do Critério não violado Porcentagem da Lâmina d´água (% ) 198 719 35,5 41,1 - 15,3 9,4 - 20,2 10,5 Tração no fundo Tração no topo Comprimento 3 mínimo apoiado 18 Raio de Curvatura 13 com 14 interferência As Figura 65 e Figura 66 pode comprovar a interferência violada. Figura 65 – Deslocamento limite 68 Figura 66 – Interferência violada 5.6.15 Direção Noroeste O deslocamento na direção Noroeste pode ser visto na Figura 67: (a) –Vista 3D (b) –Vista Superior Figura 67 - Direção Noroeste 69 Tal direção trouxe como posição limite de 115 metros devido a violação comprimento mínimo apoiado do riser 3. Observa-se também para esta direção de movimento, na Tabela 27, um aumento do deslocamento limite se o comprimento mínimo fosse atendido. Tabela 27 - Direção Noroeste Direção 15 NW Limite ZOR (m) Riser 230 5 115 210 310 Critério Violado Tração no fundo Comprimento 3 mínimo apoiado 18 Raio de Curvatura 15 com 16 interferência Valor do Critério não violado 189 Porcentagem da Lâmina d´água (% ) 37,1 - 18,5 9,3 - 33,9 50,0 As Figura 68 e Figura 69 provam o deslocamento prescrito dentro da zona segura dos risers e o momento final onde a violação ocorre. Figura 68 – Deslocamento limite 70 Figura 69 – Comprimento mínimo apoiado 5.6.16 Direção Nor-Noroeste O movimento prescrito para tal direção foi dado pela Figura 70: (a) –Vista 3D (b) –Vista Superior Figura 70 - Direção Nor-Noroeste 71 A violação do comprimento mínimo no fundo do riser 16 ocorre na posição de 185 metros, sendo essa o maior passeio limite da ZOR. Além disso, observa-se através da Tabela 28 , uma disparidade grande ao próximo critério na atendido. Tabela 28 - Direção Nor-Noroeste Direção 16 NNW Limite ZOR (m) Riser Critério Violado 235 16 185 16 310 12 com 11 Tração no fundo Comprimento mínimo apoiado interferência Valor do Critério não violado 183 Porcentagem da Lâmina d´água (% ) 37,9 - 29,8 - 50,0 As Figura 71 e Figura 72 representam o deslocamento limite da ZOR, demonstrando que o riser possui seu comprimento mínimo apoiado no solo. Figura 71 – Deslocamento limite 72 Figura 72 – Comprimento mínimo apoiado 73 6 COMENTÁRIOS FINAIS Este trabalho apresentou o conceito de integração entre os projetos de risers e sistemas de ancoragem de plataformas flutuantes offshore. Como primeira etapa do processo, inicia-se a elaboração da Zona de Operação dos Risers (ZOR), em que é possível determinar a área que limita o deslocamento seguro da plataforma. Verificamse os critérios estruturais do sistema de risers para cada posição que a plataforma possa assumir, a fim de identificar em quais posições eles deixam de ser atendidos. Deste modo, elabora-se no formato de um diagrama a zona de segurança de operação dos risers. Após essa etapa, utiliza-se a ZOR para o cruzamento com o diagrama de offsets, este realizado a partir de um modelo das linhas de ancoragem, casco da plataforma e dos risers. É possível então, uma integração dos dois projetos, e uma posterior adaptação do sistema de linhas de ancoragem que limite o passeio das plataformas para dentro da ZOR. No presente estudo, o foco foi na geração da ZOR. A partir de uma plataforma flutuante baseada em um modelo representativo da realidade, contendo 18 risers flexíveis, foi possível analisar através do programa SITUA/Prosim a resposta estrutural dos risers. A análise foi estática, na qual apenas foram avaliados os carregamentos ambientais das correntes e os deslocamentos prescritos no topo dos risers. Pode-se concluir ao observar a ZOR do projeto, que a maioria dos movimentos limites não ultrapassou 20% da lâmina d´água. Normalmente, a plataforma não costuma ultrapassar essa porcentagem de deslocamento. A assimetria do sistema de risers ocasionou uma grande disparidade entre os passeios limites da ZOR para cada direção analisada. Por exemplo, a direção NorNoroeste apresenta um deslocamento de quase 30% da lâmina d´água, enquanto que se pode perceber uma significativa restrição dos movimentos de Nor-Nordeste a Leste, com um deslocamento proporcional a aproximadamente 5% da lâmina d´água. Os valores excessivamente restritivos encontrados para essas direções citados também podem ser explicados devido à estimativa conservadora dos parâmetros de raio de curvatura mínimo (Minimum Bend Radius – MBR). Pode-se observar que os risers 2 e 7 tiveram sua curvatura violadas em inúmeras direções para diferentes velocidades de corrente. Caso fosse constatado que 74 os valores estimados de MBR dos risers não fossem tão conservadores, uma vez de posse dos dados reais, um aumento no ângulo de topo desses risers poderia ser capaz de conferir uma melhor eficiência ao sistema, já que o raio de curvatura na região do TDP aumentaria. Essa região apresenta os menores raios de curvatura ao longo dos risers. Outro predominante critério estrutural de violação da segurança dos risers foi a interferência entre eles nas direções de Sudoeste a Oés-Noroeste. Houve um frequente contato entre os risers 13 e 14 e 7 e 8, o que poderia causar um atrito entre eles e um provável dano nos seus materiais. Deste modo, caso fosse possível no projeto, um aumento da distância entres os risers ou a variação do ângulo de topo entre risers vizinhos proporcionaria uma performance melhor do sistema. Pode-se concluir então, que pequenas alterações no projeto do sistema dos risers podem acarretar em consequências para todo o projeto, pois o sistema de ancoragem vai ter seu dimensionamento baseado na zona de segurança operacional dos risers. 75 7 PROPOSTAS PARA TRABALHOS FUTUROS A metodologia do processo de elaboração da ZOR foi realizada através de um método aproximado. A sugestão para posteriores trabalhos é então, para uma análise mais detalhada da ZOR em que se inclua uma análise dinâmica do projeto de risers da unidade flutuante, na qual se avalia também a influência do carregamento ambiental de onda. Deste modo, haveriam outros casos de combinações de carregamentos a serem analisadas, incorporando também o desalinhamento do movimento prescrito a das correntes e ondas. Além disso, determinados critérios estruturais não foram considerados no estudo, e podem possuir valores determinantes no projeto. Outro ponto que pode ser sugerido para próximos estudos é a integração de risers e do sistema de ancoragem, que não teve concepção no projeto presente. O modelo dos risers analisado pode ser acrescentado ao sistema de ancoragem e assim, elaborar o diagrama de offsets. Com este, pode-se cruzar os diagramas e obter um sistema que possua melhor desempenho, considerando ambos os projetos. 76 8 REFERÊNCIAS [1] Site da Ecodebate: http://www.ecodebate.com.br/2015/04/08/a-mistificacao-do-pre-sal-estaafundando-o-brasil-artigo-de-jose-eustaquio-diniz-alves/ - Acesso em: 11/08/2015 [2] Site da Wikipedia Pt: https://pt.wikipedia.org-/wiki/Plataforma_petrol%C3%ADfera - Acesso em: 11/08/2015 [3] Site da Petrobras: http://www.petrobras.com.br/fatos-e-dados/nove-plataformas-que-vao-ampliara-producao-de-petroleo-no-brasil.htm - Acesso em: 11/08/2015 [4] Site da Oceânica Ufrj: http://www.oceanica.ufrj.br-/deno/prod_academic/relatorios/2011/NathalieThiago/relat1/-Conteudo.htm - Acesso em: 11/08/2015 [5] Site da Fukymarintech: http://fukymarintech.weebly.com/mooring-types.html - Acesso em: 11/08/2015 [6] Site da Oceânica Ufrj: http://www.oceanica.ufrj.br/-deno/prod_academic/relatorios/atuais/DanielQ+Leticia/relat1/fundeio.htm - Acesso em: 11/08/2015 [7] Site da Moveconsult: http://www.moveconsult.com.br/cabos.php - Acesso em: 11/08/2015 [8] Site da Subsea Worldnews: subseaworldnews.com - Acesso em: 11/08/2015 [9] Site da Scielo: http://www.scielo.br/scielo.php?pid=S0101-74382002000300002-&script=sci_arttext - Acesso em: 11/08/2015 [10] Site da Brascabo: www.brascabo.net - Acesso em: 11/08/2015 [11] API RP 2A - Recommended Practice for Planning, Designing, and Constructing Fixed Offshore Platforms—Working Stress Design [12] GIRÓN, A. R. C. – Projeto Integrado de Sistemas de Ancoragem e Risers em Plataformas Flutuantes de Produção de Petróleo. Tese de Doutorado no Programa de Pós-Graduação da Engenharia Civil, COPPE da UFRJ, Rio de Janeiro, 2013. 77 [13] Site do LAMCSO: http://www.lamcso.coppe.ufrj.br-/index.php-/software-/prosim - Acesso em: 11/08/2015 [14] MONTEIRO, B. F. – Otimização do Sistema de Ancoragem através do Método do Enxame de Partículas com base em uma Metodologia de Projeto Integrado. Tese de Doutorado no Programa de Pós-Graduação da Engenharia Civil, COPPE da UFRJ, Rio de Janeiro, 2014. [15] SENRA, S. F. – Metodologia de Análise e Projeto Integrado de Sistemas Flutuantes para Explotação de Petróleo Offshore. Tese de Doutorado no Programa de Pós-Graduação da Engenharia Civil, UFRJ, Rio de Janeiro, 2004. [16] CHAKRABARTI, S. K. – Hydrodynamics of Offshore Structures [17] JACOB, B.P., PROSIM- Simulação Numérica do Comportamento de Sistemas Para Explotação de Petróleo Offshore. Versão Preliminar, Manual Teórico, LAMCSO/COPPE/UFRJ, Programa de Engenharia Civil, Rio de Janeiro, 2006. 78
Baixar