Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 EXTENSÃO DE GRAU RELATIVO ARBITRÁRIO PARA O MRAC BINÁRIO MULTIVARIÁVEL UTILIZANDO DIFERENCIADORES ROBUSTOS EXATOS GLOBAIS A NDREI BATTISTEL , E DUARDO V.L. N UNES AND L IU H SU∗ ∗ Programa de Engenharia Elétrica COPPE/Universidade Federal do Rio de Janeiro, C.P. 68504 21945-970-Rio de Janeiro, RJ, Brasil Email: [email protected], [email protected], [email protected] Abstract— This paper presents a multivariable adaptive control technique that does not require stringent symmetry assumptions on the High Frequency Gain and is applicable to plants of non-uniform arbitrary relative degree. The result is an extension to the Multivariable Binary Model Reference Adaptive Control (BMRAC), where Global Robust Differentiators (GRED) are used to circumvent the relative degree obstacle. Global exact output tracking for uncertain linear plants is obtained with good transient performance and robustness. Keywords— Multivariable Adaptive Control, High Order Sliding Modes, Robust Exact Differentiators Resumo— Este trabalho apresenta a extensão para grau relativo arbitrário e não uniforme do Controle Adaptativo Multivariável Binário por Modelo de Referência (BMRAC). Obtém-se um controlador robusto com rastreamento global e exato para plantas lineares incertas sem a necessidade de simetrização da matriz do ganho de alta frequência. Para contornar o problema do grau relativo, é utilizada a versão multivariável do Diferenciador Robusto Global e Exato (GRED), que obtém derivadas exatas através da combinação convexa de um filtro de avanço de fase com um estimador não linear baseado em modos deslizantes de ordem superior. Palavras-chave— 1 Controle Adaptativo Multivariável, Modos Deslizantes de Ordem Superior, Diferenciadores Exatos Robustos um sejam WASPR é que a matriz do HFG, Kp , tenha forma de Jordan diagonal positiva (PDJ). Este resultado motivou um novo algoritmo de MRAC direto sem a necessidade de superparametrização e que dispensa as condições de simetria em Kp (Hsu et al., 2014) Sabe-se que os controladores adaptativos baseados em lei do gradiente têm como característica os maus transitórios de adaptação e a pouca robustez. A partir daí motivou-se o desenvolvimento do BMRAC (Binary Model Reference Adaptive Control) (Hsu and Costa, 1994), que permite um aumento do ganho de adaptação de maneira que estes problemas são suavizados, permitindo bom comportamento transitório e robustez. O BMRAC consiste basicamente no MRAC convencional com uso de projeção paramétrica combinado com alto ganho de adaptação. A extensão multivariável para grau relativo um foi recentemente apresentada em (Yanque et al., 2012). Embora o BMRAC tenda para um controle em modos deslizantes conforme o ganho de adaptação aumenta, este ganho pode ser sintonizado para um valor suficientemente alto evitando o chattering. Embora esta solução requeira apenas que Kp seja PDJ, relaxando assim a condição de simetria, o algoritmo em questão é restrito a plantas de grau relativo uniforme ρ = 1 apenas. Neste trabalho é proposta uma nova extensão ao MIMO BMRAC englobando plantas de grau relativo não uniforme e que permite obter rastreamento global e exato através de um estimador híbrido recentemente generalizado para o caso multivariável (Nunes et al., 2013). Tal estimador, chamado Diferenciador Robusto Exato Global (GRED, Global Robust Exact Differentiator), chaveia entre um filtro MIMO de avanço de fase e um filtro não linear que utiliza Diferenciadores Robustos Exatos (RED) (Levant, 2003) Introdução As técnicas convencionais de Controle Adaptativo Direto1 Multivariável por Modelo de Referência (MIMO MRAC) requerem o conhecimento de um multiplicador Sp para a matriz Kp do Ganho de Alta Frequência (HFG, high frequency gain), tal que Sp Kp se torne simétrica positiva definida (SPD, symmetric positive definite) (Tao, 2003) (Ioannou and Sun, 1996). Essa hipótese é não genérica, portanto frágil, uma vez que uma perturbação paramétrica arbitrariamente pequena no Kp destrói a simetria. Algumas das técnicas que permitem o projeto de controladores MIMO-MRAC para plantas com HFG incerto e possivelmente não simétrico se baseiam em fatoração matricial (Tao, 2003), (Costa et al., 2003), (Imai et al., 2004), (Xie and Zhang, 2005), (Xie and Li, 2006), (Xie, 2008), (Boulkroune et al., 2010), (Charandab et al., 2011). Embora trate-se de uma solução bastante genérica que dispensa o conhecimento de uma matriz simetrizante Sp , a desvantagem é a resultante superparametrização do controle. Uma possibilidade recente de contornar a exigência de simetria é encontrada em (Barkana et al., 2006) and (Hsu et al., 2011a), utilizando para tal o conceito de passividade generalizada, WSPR (W strictly positive real) apresentado em (Fradkov, 2003) ao invés do paradigma usual de positividade real SPR; e a idéia de passividade WASPR (W almost SPR), no qual um sistema pode se tornar WSPR por meio de realimentação estática de saída. É demonstrado em (Hsu et al., 2011a) que a condição necessária e suficiente para que sistemas de fase mínima de grau relativo 1 No controle adaptativo direto, os parâmetros do controlador são diretamente atualizados por uma lei de adaptação 1135 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 3 baseado em modos deslizantes de ordem superior. O uso do MIMO GRED torna o erro do sistema uniformemente exponencialmente globalmente praticamente estável em relação a um conjunto residual pequeno com convergência para zero. 2 Considera-se uma planta MIMO linear invariante no tempo descrita por ẋp = Ap xp + Bp u , O conceito de SPR convencional requer que o ganho de alta frequência da planta seja SPD, condição dificilmente satisfeita por sistemas reais. Uma solução para contornar esta dificuldade foi recentemente proposta em (Barkana et al., 2006), (Hsu et al., 2011a), explorando um conceito mais geral de passividade associado com a definição de WSPR e resultados correlatos. y = G(s)u, (2) G(s) = Hp (sI −Ap )−1Bp . As seguintes hipóteses são consideradas (A1) G(s) é de fase mínima e tem posto completo. Definição 1 (WSPR) (Barkana et al., 2006) (Hsu et al., 2011b) Um sistema linear invariante no tempo com a realização {AK , B, C}, onde AK ∈ Rn×n , B ∈ Rn×M , and C ∈ RM ×n é dito W –Estritamente Passivo (WSP) e a sua função de transferência C(sI −AK )−1 B é dita W –Estritamente Positiva Real (WSPR), se existem matrizes simétricas positivas definidas P , Q e W tal que P B = CT W . y = Hp xp , onde xp ∈ Rn é o estado, u ∈ RM é a entrada, y ∈ RM é a saída e Ap , Bp and Hp são matrizes constantes e incertas. Todos os parâmetros incertos pertencem a um conjunto compacto Υ, tal que são disponíveis os limites de incerteza necessários a serem definidos posteriormente. O modelo entrada-saída da planta é dado por Passividade generalizada (WSPR) ATK P + P AK = −Q , Descrição do Problema (A2) A planta é controlável e observável. (A3) O índice de observabilidade ν de G(s), ou um limitante superior de ν é conhecido. (A4) Existe uma matriz polinomial diagonal conhecida ξm (s), definida como a matriz interactor pela esquerda modificada (MLI) de G(s) da forma ξm (s) = diag {d1 (s), d2 (s), . . . , dM (s)} onde di (s) são polinômios mônicos estáveis de grau ρi > 0. (1) (A5) A matriz de ganho de alta frequência de G(s), definida como Kp = lims→∞ ξm (s)G(s) é finita e não singular, com autovalores positivos e forma de Jordan diagonal (condição PDJ). Definição 2 (WASPR) : Um sistema linear e invariante no tempo com realização {A, B, C}, é dito WASP se pode se tornar WSP a partir de uma realimentação estática de saída, i.e., se existe K ∈ RM ×M tal que C(sI − AK )−1 B é WSPR, com AK = A − BKC. Assim, pela hipótese (A4), o grau relativo vetorial [ρ1 , ρ2 , ..., ρM ]T é arbitrário e conhecido. O sinal de referência ym é gerado pelo seguinte modelo de referência O teorema WASPR é enunciado como em (Hsu et al., 2011a) e estabelece a condição para que um sistema se torne WSPR por meio de realimentação estática de saída. ym = M (s) r ; r, ym ∈ IRM (3) −1 M (s) = diag (s + a) , ..., (s + a)−1 L−1 (s) (4) Teorema 1 (Teorema WASPR (Hsu et al., 2011b)) Todo sistema estritamente próprio e de fase mínima {A, B, C} com A ∈ Rn×n , B ∈ Rn×M , C ∈ RM ×n e matriz de transferência C(sI − A)−1 B de ordem M × M pode se tornar WSPR através de realimentação de saída (suficientemente grande), se e somente se Kp tem autovalores positivos e reais e sua forma de Jordan é diagonal (condição PDJ). onde a > 0 e L(s) é dado por L(s) = diag {L1 (s), L2 (s), ..., LM (s)} , (5) e Li (s), i = 1, ..., M são polinômios Hurwitz dados por [i] [i] [i] Li (s) = s(ρi −1) + lρi −2 s(ρi −2) + ... + l1 s + l0 (6) A matriz de transferência M (s) tem o mesmo grau relativo vetorial de G(s) e o seu HFG é a matriz identidade. O objetivo de controle é encontrar uma lei de controle u(t) tal que o erro de saída Conforme (Hsu et al., 2011a)[Lemma 1], a condição necessária e suficiente para a existência de W que simetriza Kp é que Kp = CB tenha autovalores positivos e reais e que sua forma de Jordan seja diagonal positiva (condição PDJ). De acordo com (Hsu et al., 2014),(Yanque et al., 2012), se Kp não satisfaz a condição de PDJ, é possível escolher um multiplicador matricial L̄ tal que L̄Kp satisfaça a condição de PDJ de maneira robusta. e(t) = y(t) − ym (t), (7) tenda a zero assintoticamente para condições iniciais arbitrárias. Quando a planta é conhecida, uma 1136 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 lei de controle que obtém o casamento entre a matriz de transferência em malha fechada e M (s) é dada T por u∗ = Θ∗ ω, onde a matriz de parâmetros pode h T iT T T ∗T ser escrita como Θ∗ = Θ∗u Θ∗y Θ∗0 KΘ , com Θ∗u , Θ∗y Kronecker. A lei de adaptação do MIMO BMRAC é dada por ϑ̇ = −ϑσ − γΩξ (14) com σ dada por uma projeção 0, se ||ϑ|| < Mϑ ou σeq < 0 σ= σeq , se ||ϑ|| ≥ Mϑ e σeq ≥ 0 ∗ , Θ∗0 , KΘ ∈ IRM ×M e o vetor [ωuT ωyT y T rT ]T , ωu , ωy ∈ IRM (ν−1) M (ν−1)×M ∈ IR regressor ω = é obtido dos filtros de entrada e saída dados por: ωu = A(s)Λ−1 (s)u , ωy = A(s)Λ−1 (s)y , σeq = (8) onde A(s) = [Isν−2 Isν−3 · · · Is I]T , Λ(s) = λ(s)I e λ(s) é um polinômio mônico e estável de grau ∗T ν − 1. A condição de casamento requer que KΘ = −1 Kp . No entanto, como a planta é desconhecida, a matriz de parâmetros desejada Θ∗ também é desconhecida. Nesse caso, a seguinte lei de controle pode ser usada u(t) = ΘT (t)ω(t) (9) 4 y = H0 X (10) com Ac = A0 + B0 θ∗T Ω1 , Bc = B0 Kθ∗T = B0 Kp−1 . O modelo de referência pode ser descrito por Ẋm = Ac Xm + Bc r. Assim, o estado do erro xe = X − Xm é dado por (16) BMRAC utilizando um filtro MIMO de avanço de fase onde hTi ∈ Rn+2M (ν−1) é a i-ésima linha da matriz Ho e a segunda igualdade é obtida a partir da hipótese (A4) e da Eq. (10). O erro de grau relativo ρ = 1 corresponde a e = ξ y − ym (19) (11) Note que (Ac , Bc , H0 ) é uma realização não mínima de M (s) e assim o a equação do erro pode ser reescrita na forma entrada-saída como e = M (s)Kp [u − u∗ ] 2 O BMRAC proposto em (Yanque et al., 2012) obtém rastreamento global e exato se a planta considerada tem grau relativo uniforme n∗ = 1. Para contornar o problema do grau relativo, utiliza-se o operador (6), tal que L(s)G(s) e L(s)M (s) tenham grau relativo uniforme n∗ = 1. Para tal, define-se a seguinte saída modificada: (ρ −1) [1] [1] y1 1 + · · · + l1 ẏ1 + l0 y1 .. = ξy =L(s)y = . (ρ −1) [M ] [M ] yM M + · · · + l1 ẏM + l0 yM Pρ1 −1 [1] T (j) j=0 lj h1 Ac X .. = H̄X , (18) . PρM −1 [M ] T (j) j=0 lj hM Ac X Ẋ = Ac X + Bc Kp [u − u∗ ] + Bc r, e = H0 xe ||ϑ|| onde Mϑ > ||ϑ∗ ||. A lei de controle pode ser rescrita como u(t) = ΘT (t)ω(t) = ΩT (t)ϑ(t) (17) onde Θ é uma estimativa de Θ∗ obtida por uma lei de adaptação. Uma equação do erro pode ser obtida estendendo-se a abordagem usual do MRAC para o caso SISO para o caso MIMO (Tao, 2003; Ioannou and T Sun, 1996). Define-se o vetor X = xTp , ωuT , ωyT com a seguinte dinâmica Ẋ = A0 X + B0 u. Assim, somando e subtraindo B0 u∗ e notando que há matrizes Ω1 e Ω2 tal que ω = Ω1 X + Ω2 r, segue-se que ẋe = Ac xe + Bc Kp [u − u∗ ] , −γϑT Ωξ (15) Deve-se notar que o sinal ξy necessário para contornar o obstáculo do grau relativo não é diretamente disponível para implementação. Uma maneira de resolver este problema é estimando ξy por meio de um filtro de avanço de fase. (12) Esta é uma abordagem existente para o caso de plantas com grau relativo arbitrário uniforme (Yanque et al., 2012). A extensão para o caso de grau relativo arbitrário pode ser obtida utilizando estimativas das derivadas de y, tal que um sistema de grau relativo uniforme n∗ = 1 é gerado. A extensão do BMRAC para sistemas MIMO é usada como na proposta apresentada em (Yanque et al., 2012), adotando a seguinte parametrização: θ1 ω θ2 .. ϑ = vec(Θ) = . , Ω = Im ⊗ω = . .. ω θn (13) com Ω ∈ IRN M ×M , ϑ ∈ IRN M , onde N é o número de elementos do vetor regressor ω, θi é a i-ésima coluna da matriz de parâmetros Θ e ⊗ é o produto de ξˆl = La (s)e, La (s) = L(s)F −1 (τ s) (20) onde F (τ s) = diag{(τ s + 1)ρ1−1 , . . . , (τ s + 1)ρm−1 }. Pode-se notar que conforme τ > 0 tende a zero, ξˆl aproxima ξy . Definindo-se o erro de estimativa do filtro de avanço de fase como l = ξˆl − ξy , a respectiva dinâmica pode ser descrita como ẋε = 1 Aε xε + Bε ξ˙y , τ εl = Hε xε , (21) onde ξ˙y = H̄Ac X + H̄Bc Kp ϑ̃T Ω (ver (11) e (18)), [1] [M ] [i] Aε = block diag {Aε , . . . , Aε }, com Aε ∈ ρi −1×ρi −1 R , 1137 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 [1] [M ] [i] Bε = block diag {Bε , . . . , Bε }, com Bε [1] [M ] Rρi −1×1 , Hε = block diag {Hε , . . . , Hε }, [i] com Hε ∈ R1×ρi −1 , A[i] ε [i] [i] 5 −aρi −2 1 0 ... 0 −a[i] ρi −3 .. = . [i] −a1 0 .. . 0 1 .. . 0 ... .. . 0 [i] −bρ −3 0 i .. , B [i] = .. , . ε . [i] 1 −b1 0 0 0 0 , [i] −a0 Hε[i] = [i] aj ∈ = 1 0 −1 Cρρii−1−j , 0 ... [i] ρi −1 bj = Cj+1 −bρi −2 0 [i] −b0 Cln = n!/(k!(n − k)!) com σ dada por uma projeção 0, se ||ϑ|| < Mϑ ou σeq < 0 σ= σeq , se ||ϑ|| ≥ Mϑ e σeq ≥ 0 σeq = −γϑT Ω(ē + βα ) ||ϑ|| 2 Na seção anterior, o BMRAC utilizando um filtro de avanço de fase para estimar ξy foi analisado. Pelo Teorema 2 a convergência do estado do erro é garantida apenas a um conjunto residual. Para obter um rastreamento exato, pode-se utilizar a extensão MIMO do diferenciador baseado em modos deslizantes de ordem superior (HOSM, high order sliding modes) recentemente proposto em (Levant, 2003). A ideia é empregar um RED de ordem pj = ρj − 1 para cada saída ej ∈ R, j = 1, . . . , M como se segue: [j] [j] ζ̇i = vi , Na análise de estabilidade em malha fe do sistema chada com estado z T = xTe xTε , considera-se a presença de uma perturbação de saída uniformemente limitada βα (t) de ordem τ do filtro de avanço de fase. Por projeto, βα (T ) ≤ M com M = τ KR , e KR > 0 é uma constante. Utilizando o filtro MIMO de avanço de fase, a lei de adaptação é dada por ϑ̇ = −ϑσ − γΩ(ē + βα ) Diferenciador Robusto Exato MIMO [j] [j] vi = −λi Cρ[j]j 1 pj −i+1 pj −i [j] [j] [j] p −i+1 [j] sgn(ζi −vi−1 ) ζi −vi−1 j [j] + ζi+1 , .. . [j] [j] [j] ζ̇p[j]j = −λ[j] pj Cρj sgn(ζpj − vpj ), (25) onde i = 0, . . . , pj − 1, (22) (ρj ) constante tal que |ej [j] v−1 = ej (t), [j] Cρj é uma [j] (t)| ≤ Cρj , ∀t. Se os parâme- [j] tros λi são propriamente escolhidos de forma recursiva 2 , então as igualdades são válidas em tempo finito (Levant, 2003). (23) [j] [1] [1] [1] [1] [1] ζρ1 −1 + · · · + l1 ζ1 + l0 ζ0 .. . ξˆr = . [M ] [M ] [M ] [M ] [M ] ζρM −1 + · · · + l1 ζ1 + l0 ζ0 (26) Assim, as derivadas de y podem ser usadas conforme em ξy = L(s)y. Porém, apenas a convergência local do estado do erro para zero pode ser garantida, uma (ρ ) vez que os sinais ej j (t), j = 1, . . . , M devem ser uniformemente limitados. 6 Corolário 3 Para todo R > 0, existe τ > 0 suficientemente pequeno e γ suficientemente grande tal que para algum tempo finito T , o estado do erro z(t) é levado a um conjunto invariante compacto DR := {z : ||z|| ≤ R}. BMRAC baseado no RED Global (GRED) A fim de garantir a estabilidade global e exponencial em relação a um conjunto residual e obter a convergência global do estado do erro para zero, demonstrase que o filtro MIMO de avanço de fase apresentado na Seção 4 pode ser combinado com o RED MIMO (Seção 5). O esquema de controle proposto, chamado GRED-BMRAC, é baseado em um compensador híbrido que consiste em uma combinação convexa e variante no tempo entre a estimativa dada pelo filtro MIMO (20) e a estimativa do RED MIMO (26), da (i) Corolário 4 Os sinais ej (t), i = 0,. . ., ρj , j = ∞ j = 1, . . . , m; Assim, utilizando um RED MIMO composto de M REDs de ordem ρj − 1 para cada saída ej , a seguinte estimativa de ξy pode ser obtida Teorema 2 Dada a planta (2) e o modelo de referência (3)–(5) com sinal de controle (9) e lei de adaptação (22)–(24). Suponha que as hipóteses (A1) a (A5) são satisfeitas. Se a perturbação βα (t) é uniformemente limitada por ||βα (t)|| ≤ τ KR , onde KR > 0 é uma constante, então para τ > 0 suficientemente pequeno e γ > 0 suficientemente grande, o sistema do erro em malha fechada (11), (9), (18), (21), (22)–(24) com estado z T = xTe xTε , é uniformemente globalmente exponencialmente praticamente estável (GEpS) em relação a um conjunto residual, i.e., existem constantes cz , a > 0 tal que ||z(t)|| ≤ cz e−a(t−t0 ) ||z(t0 )||+ O(τ ) + O(γ −1 ) é satisfeita ∀z(t0 ), ∀t ≥ t0 > 0. (Prova: ver Apêndice.) [j] (i) i =1, . . . , pj onde Mϑ > ||ϑ∗ ||. Neste ponto, o seguinte Teorema pode ser enunciado. 1,. . ., M são uniformemente limitados, i.e., ∃Ki (i) [j] 0 tal que |ej (t)| ≤ Ki , ∀ t ≥ t0 ≥ 0, i 0,. . ., ρj , j = 1,. . ., M . Além disso, se ||xe (t)|| (ρ ) [j] R, ∀t > T , então, ∃Cρj > 0 tal que ej[Tj,t] [j] ζ0 =ej (t); ζi = ej (t), (24) > = ≤ ≤ 2 Particularmente, [j] Cρj , j = 1, . . . , M . (Prova: ver Apêndice) [j] 1.5, λ3 1138 [j] para pj ≤ 3: λ0 [j] = 5, λ1 [j] = 3, λ2 = = 1.1. Mais detalhes são encontrados em (Levant, 2003). Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 seguinte forma: ξˆg = α(ν̃rl ) ξˆl + [1 − α(ν̃rl )] ξˆr , (27) onde ν̃rl = ξˆr − ξˆl é a diferença entre ambas estimativas. A função de chaveamento α(ν̃rl ) é uma modulação contínua e dependente do estado que assume valores no intervalo [0, 1] e permite que o controlador alterne de maneira suave entre os estimadores. Deve-se notar que a estabilidade global a um conjunto invariante DR é garantida independente do chaveamento entre os estimadores, uma vez que é possível mostrar que o sistema resultante é equivalente a um BMRAC com filtro MIMO de avanço de fase como uma perturbação de saída uniformemente limitada de ordem τ . Assim, estabilidade prática global e convergência ao conjunto DR são garantidas de acordo com o Teorema 2. A função de chaveamento é escolhida de maneira a garantir que, em tempo finito apenas, a estimativa do RED MIMO seja utilizada. α(·) é projetado de maneira que Especificamente, ˆ ˆ ≤ τ K : ξ − ξ g R l Figura 1: Diagrama de blocos do GRED-BMRAC conjunto residual e a estimativa do MIMO RED e todos os sinais em malha fechada são uniformemente [j] limitados. Além disso, para λi , j = 1, . . . , M , i = 0, . . . , ρj − 1, e KR propriamente escolhidos, a estimativa das derivadas do erro ξy passam a ser exatas, utilizando apenas o RED (α(·) = 0)em tempo finito. Assim, o estado do erro em malha fechada z T = xTe xTε , e portanto o erro de saída e, convergem exponencialmente para zero. (Prova: a prova segue os passos das provas de (Nunes et al., 2013)[Teorema 3], (Nunes et al., 2009)[Teorema 3]). 0, ||ν̃rl || < εM − ∆ α(ν̃rl ) = (||ν̃rl ||−εM +∆)/∆, εM −∆ ≤ ||ν̃rl || < εM 1, ||ν̃rl || ≥ εM (28) onde 0 < ∆ < εM é uma camada de transição utilizada para suavizar a função de chaveamento, e εM := τ KR onde KR é um parâmetro de projeto, escolhido tal que εM −∆ > ε̄l . Isto implica que em tempo finito apenas a estimativa do RED MIMO é utilizada (α = 0), provendo o valor exato das derivadas de ξy conforme desejado. Uma forma de ajuste os parâmetros do GRED MIMO é dada em (Nunes et al., 2013). Usando o GRED para estimar ξy a lei de adaptação é dada por ϑ̇ = −ϑσ − γΩξˆg com σ dado por uma projeção 0, se ||ϑ|| < Mϑ ou σeq < 0 σ= σeq , se ||ϑ|| ≥ Mϑ e σeq ≥ 0 σeq = −γϑT Ωξˆg ||ϑ|| 2 7 Resultados de Simulação Considera-se um sistema MIMO linear invariante no tempo descrevendo um atuador e processo dados por 10 20 0 0 1 2 3 1 −1 −0.5 0 −0.5 0 2 1 1 , A= 0 0 1 1 ; B = 0 0 16 80 0 0 0 4 0 0 0 1 (29) H =I cuja matriz de transferência é G0 (s). A planta é composta de um atuador/processo e um sensor dado pela matriz de transferência Gs (s) = diag{1/(s + 1), 1/(s + 1), 1, 1}. A matriz de transferência resultante G(s) = Gs (s)G0 (s) de u para y tem grau relativo vetorial ρ = [2, 2, 1, 1]. O modelo é escolhido como M (s) = diag{1/(s + 1)2 , 1/(s + 1)2 , 1/(s + 1), 1/(s + 1)}. Por simplicidade, escolhe-se Kp = B PDJ. Assim, com L(s) = diag {(s + 1), (s + 1), 1, 1}, a matriz de transferência correspondente L(s)M (s)KP pode ser demonstrada como sendo WSPR. Quando isto não é possível, um multiplicador passivador pode ser utilizado a partir de um Kp nominal (Hsu et al., 2011a). De acordo com a prova do teorema WASPR em (Barkana et al., 2006), pode-se concluir que um sistema WSPR mantém-se WSPR com qualquer realimentação estática de saída de ganho −k onde k é um escalar positivo. Verificouse que é possível melhorar a velocidade da convergência do erro de rastreamento ajustando-se este ganho k. (30) (31) onde Mϑ > ||ϑ∗ ||. Os resultados de estabilidade e convergência do controlador proposto são enunciados no teorema a seguir. Um diagrama de blocos da estratégia é mostrado na Fig. 1 Teorema 5 Seja a planta (2) e o modelo de referência (3)–(5) com lei de controle dada por (9) e lei de adaptação (29)–(31). A função de chaveamento α(·) é definida em (28). Supondo que as hipóteses (A1) a (A5) são válidas, para τ > 0 suficientemente pequeno e γ > 0 suficientemente grande, o sistema do erro em malha fechada, descrito por (9), (11), (18), (21), (29)–(31) é uniformemente globalmente exponencialmente praticamente estável (GEpS) em relação a um 1139 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Figura 2: Erros de rastreamento obtidos quando apenas o filtro de avanço de fase é utilizado Figura 3: Erros de rastreamento obtidos como estimador híbrido (GRED-BMRAC) O sinal de referência r(t) ∈ IR4 é escolhido como ondas quadradas com offset f (t/T ) = sqw(2t/T ) + 1 e diferentes períodos T , rT = 0.5[f (t/6); 2f (t/2); 3f (t/4); 3f (t/0.3)]. O único conhecimento prévio da planta necessário para o controle é Mϑ = 15 (de acordo com (31)) e o índice de observabilidade ν = 2. O ganho de adaptação é γ = 10. Outros parâmetros de projeto são: filtro de avanço de fase (20): τ = 0.01; RED MIMO (25)-(26): [1] [1]1/2 [1] [1] [1] λ0 = 1.5C2 , λ1 = 1.1C2 e C2 = 10; função de chaveamento (28): εM = 0.5 e ∆ = 0.2. A condição inicial da planta é y(0) = [1 1 1 1]. O restante das condições iniciais é zero. Quando apenas o filtro de avanço é utilizado, o erro tem amplitude considerável, conforme Fig. 2. Quando o diferenciador híbrido é empregado, erro nulo de rastreamento é obtido (a menos de erros de integração numérica), conforme a Fig. 3. O desempenho do rastreamento é visto na Fig. 4e pode-se ver que o chattering é evitado no controle. Finalmente, na Fig. 5 pode-se notar que a diferenciação é feita inicialmente pelos filtros de avanço de fase para em seguida chavear permanentemente para o RED MIMO em tempo finito. Deve-se notar que nas mesmas circunstâncias o sistema é instável se apenas o RED MIMO é utilizado. 8 Figura 4: Desempenho de rastreamento obtidos como estimador híbrido (GRED-BMRAC) Conclusões Este trabalho apresenta a extensão de grau relativo não-uniforme e arbitrário para o Controle Adaptativo Binário por Modelo de Referência (BMRAC). Obtémse rastreamento global e exato para plantas lineares e incertas sem a neessidade de condições restritivas de simetria no ganho de alta frequência, além de um melhor transitório em relação a técnicas convencionais do MRAC. Para contornar a restrição do grau relativo, empregou-se uma versão multivariável do Diferenciador Robusto Global e Exato (GRED), que obtém estabilidade uniforme global e prática e rastreamento exato através do chaveamento de um filtro de avanço Figura 5: a) Função de chaveamento do estimador híbrido (GRED-BMRAC) e b) sinal de controle 1140 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 de fase com um estimador não linear baseado em modos deslizantes de ordem superior. O sinal de controle é contínuo e sem chattering com λ = λmin (Q)/λmax (P ). Utilizando um lema de comparação é possível mostrar que existem constantes cz , a > 0 tal que ||z(t)|| ≤ cz e−a(t−t0 ) ||z(t0 )|| + O(τ ) + O(γ −1 ) ∀z(t0 ), ∀t ≥ t0 > 0 (i) Prova do Corolário 4: É possível mostrar que ej = Apêndice (i) hT j Ac xe , i = 1, . . . , ρi − 1, j = 1, . . . , m. Uma vez que o estado do erro xe é uniformemente limitado, existem constan(i) tes tais que: |ej | ≤ Ki , ∀t ≥ t0 ≥ 0, i = 0, . . . , ρi − No que se segue, todos ki e κi são constantes positivas. Prova do Teorema 2: Considerando a seguinte candidata a função de Lyapunov, com P1 , P2 e WN simétricas e positivas definidas, e ϑ̃ = ϑ − ϑ∗ . V = xT e P 1 xe + 1 T ϑ̃ WN ϑ̃ + xT ε P2 xε γ (ρ ) 1, j = 1, . . . , M . Além disso, tem-se que ej j , j = 1, . . . , M é uniformemente limitado, uma vez que o estado do erro xe (t), e os sinais u(t) e u∗ , são uniformemente limitados. (32) Onde utilizou-se ē = ξ̂l − ym and ξy = ξ̂l + εl . Pela Eq. (18), e tendo que WN Ω = ΩW tem-se (ρj ) (ρ ) (t), j = 1, . . . , M são dados por: ej j (t) = ρ −1 ρ j j T hT Bc Kp [u(t) − u∗ ] . Note que u − u∗ = j Ac xe (t) + hj Ac T T Ω ϑ̃ = Θ̃ ω e assim, a Eq. (34) permite estabelecer que |wr | ≤ (ρ ) κ1 |xe | + κ2 , visto que Xm , r e Θ̃ são limitados. Assim ej j (t) (ρ ) pode ser majorado por ej j (t) ≤ κ3 |xe (t)| + κ4 . Uma vez (ρ ) [j] que |xe (t)| ≤ R ∀t ≥ T , as inequações ej j ≤ Cρj , j = [T ,t] 1 T σ T V̇ = −xT e Q1 xe − xε Q2 xε −2 ϑ WN ϑ̃− ϑ̃WN Ω(εl +βα ) + τ γ 1, . . . , M são válidas uma vez que a projeção garante que ϑ̃ é limitado. Os sinais ej uma vez que o sistema (11) é WSPR V̇ 1 T σ x Q2 xε − 2 ϑT WN ϑ̃ + τ ε γ ˙ (33) − 2ϑ̃WN Ω(ξy + εl + βα − ym ) + 2xT P B ε 2 ε ξy T = −xT e Q1 xe + 2eW Ω ϑ̃ − T T +2xT ε P2 Bε HAK X +2xε P2 Bε HBc Kp Ω ϑ̃ Referências Sabendo-se que ΩT ϑ̃ = Θ̃T ω, xe = X −Xm , ωr = W0 (xe+Xm ) onde ωr = [ωu ωy y]T , Θ∗r = [Θ∗u Θ∗y Θ∗0 ]T e 0 I 0 0 I W0 = 0 (34) H0 0 0 Barkana, I., Teixeira, M. C. M. and Hsu, L. (2006). Mitigation of symmetry condition in positive realness for adaptive control, Automatica 39(9): 1611–1616. tem-se 1 T σ T T T V̇ = −xT e Q1 xe − xε Q2 xε −2 ϑ WN ϑ̃−(εl +βα ) W Ω ε̃+ τ γ T T +2xT ε P2 Bε HAK xe + 2xε P2 Bε HBc Kp Ω W0 xe + T T T +2xT ε P2 Bε HBc Kp Ω W0 Xm + 2xε P2 Bε HBc Kp KΘ r O que pode ser simplificado: V̇ =− xT e Q1 xe − σ 1 T x Q2 xε − 2 ϑT WN ϑ̃− τ ε γ T +2xT ε [Q3 xe +Q4 Xm + Q5 r] Fradkov, A. L. (2003). Passification of non-square linear systems and feedback Yakubovich-Kalman-Popov lemma, European Journal of Control 6(1): 573–582. com Q3 = P2 Bε HBc Kp Θ̃T r W0 +P2 Bε HAK ; T; Q4 = P2 Bε HBc Kp Θ̃T W0 ; Q5 = P2 Bε HBc Kp KΘ T Q6 = W Θ̃T W0 ; Q7 = W KΘ Uma vez que Θ é limitado e lembrando que βα é uniformemente limitado por εM = τ KR , and ||εl || ≤ ||xe ||, Hsu, L., Battistel, A. and Nunes, E. V. L. (2014). Multivariable mrac design without gain symmetry conditions using a stabilizing multiplier, IEEE Trans. Aut. Contr. to appear. k2 ||xε ||2 +k3 ||xε || ||xe || + k4 ||xε || + τ σ −2 ϑT WN ϑ̃ + O(τ ) γ Hsu, L. and Costa, R. R. (1994). B-MRAC: Global exponential stability with a new model reference adaptive controller based on binary control theory, C-TAT - Control-Theory and Advance Technology 10(04): 649–668. Special Issue on Sliding Mode Control. Completando os quadrados e simplificando, tem-se k2 k1 k2 V̇ ≤ ||xe ||2 − ||xε || − k1 − 3 τ ||xe ||2 + 2 2τ k2 2 σ +O(τ ) − 2 λM (WN ) ϑ̃ γ Hsu, L., Teixeira, M. C. M., Costa, R. R. and Assunçao, E. (2011a). Necessary and sufficient condition for generalized passivity, passification and application to multivariable adaptive systems, Proc. of the 18th IFAC World Congress, Milan. Hsu, L., Teixeira, M. C. M., Costa, R. R. and Assunçao, E. (2011b). Necessary and sufficient condition for generalized passivity, passification and application to multivariable adaptive systems, Proc. World Congress of the International Federation of Automatic Control (IFAC). ϑT WN ϑ̃ é não-positivo, De acordo com a Eq. (15), o termo −2 σ γ visto que ϑ̃ = ϑ − ϑ∗ e Mϑ ≥ ||ϑ∗ || e assumindo que τ ≤ tem-se k1 k2 V̇ ≤ − ||xe ||2 − ||xε ||2 + O(τ ) 2 4τ Uma vez que ||ϑ|| é uniformemente limitado, obtém-se P1 0 xe V ≤ [xe xε ]T + O(γ −1 ) 0 P2 xε Charandab, B. A., Salmasi, F. R. and Sedigh, A. K. (2011). Improved dead zone modification for robust adaptive control of uncertain linear systems described by input-output models with actuator fault, IEEE Transactions on Automatic Control 56(4): 863–867. Costa, R. R., Hsu, L., Imai, A. K. and Kokotović, P. (2003). Lyapunov-based adaptive control of MIMO systems, Automatica 39(7): 1251–1257. T (εl + βα ) Q6 [xe + Xm ] + (εl + βα ) Q7 r+ V̇ ≤ −k1 ||xe ||2 − Boulkroune, A., M’Saad, M. and Chekireb, H. (2010). Design of a fuzzy adaptive controller for MIMO nonlinear time-delay systems with unknown actuator nonlinearities and unknown control direction, Information Sciences 180(24): 5041–5059. k1 k2 2 , 2k3 Imai, A. K., Costa, R. R., Hsu, L., Tao, G. and Kokotović, P. V. (2004). Multivariable adaptive control using high-frequency gain matrix factorization, IEEE Transactions on Automatic Control 49(7): 1152–1157. (35) Ioannou, P. and Sun, K. (1996). Robust Adaptive Control, Prentice Hall PTR. Tal que se pode escrever z = [xe xε ]T V − O(γ −1 ) ≤ z T P z ≤ λmax (P )z T z e V̇ − O(τ ) ≤ −z T Qz ≤ −λmin (Q)z T z e assim V̇ ≤ −λ V − O(γ −1 ) + O(τ ) (36) Levant, A. (2003). Higher-order sliding modes, differentiation and output-feedback control, Int. J. Contr. 76(09): 924–941. 1141 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Nunes, E. V. L., Hsu, L. and Lizarralde, F. (2009). Global exact tracking for uncertain systems using output-feedback sliding mode control, Transactions on Automatic Control 54(5): 1141–1147. Nunes, E. V. L., Peixoto, A. J., Oliveira, T. R. and Hsu, L. (2013). Global exact tracking for uncertain mimo linear systems by output feedback sliding mode control, Journal of the Franklin Institute . Tao, G. (2003). Adaptive Control Design and Analysis, John Wiley & Sons Inc. Xie, X.-J. (2008). Stability and robustness analysis of MIMO MRAC using Kp = L2 D2 S2 factorization, International Journal of Systems Science 39(3): 265–278. Xie, X.-J. and Li, J.-L. (2006). A robustness analysis of discretetime direct model reference adaptive control, International Journal of Control 79(10): 1196–1204. Xie, X.-J. and Zhang, Z.-Q. (2005). Robust direct model reference adaptive control using Kp = LDU factorization for multivariable plants, International Journal of Control 78(10): 762– 772. Yanque, I., Nunes, E. V. L., Costa, R. and Hsu, L. (2012). Binary mimo mrac using a passifying multiplier, 2012 American Control Conference, Montreal, pp. 1925–1930. 1142
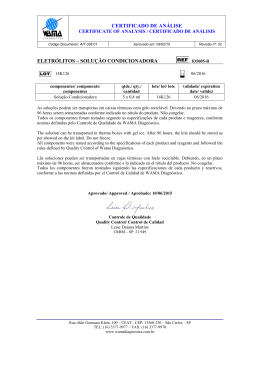
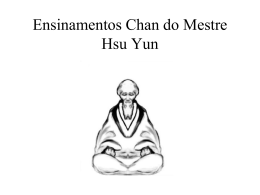
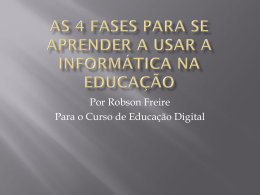
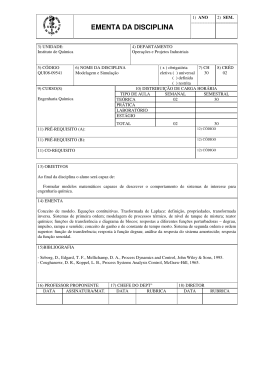
Baixar