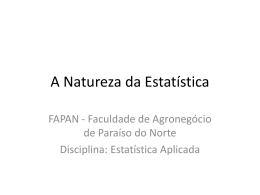
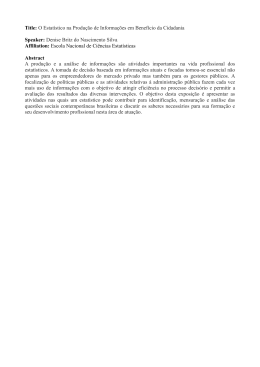
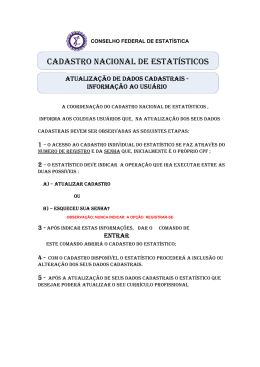
2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Monitoramento da saúde de um sistema de Flape Ms. Carlos Gustavo Nuñez Rosa, [email protected] Dr. Takashi Yoneyama, [email protected] Instituto Tecnológico da Aeronáutica – ITA Praça Marechal Eduardo Gomes, 50 – vila das Acácias CEP 12.248-900 – São José dos Campos – SP – Brasil Ms. Bruno Paes Leão, [email protected] Empresa Brasileira de Aeronáutica – EMBRAER Av. Brigadeiro Faria Lima, 2170 CEP 12227-901 – São José dos Campos – SP – Brasil Resumo. Este trabalho apresenta um estudo de testabilidade e diagnosticabilidade das degradações e falhas de um sistema de flape de uma aeronave e a implementação de técnicas de detecção de degradação através de controle estatístico de processo multivariável (em inglês: Multivariate Statistical Process Control ou MSPC). Esse tipo de análise é largamente utilizadas em outras áreas da indústria. As distâncias estatísticas Hotelling’s T² e Runger U² proporcionaram resultados de boa qualidade e podem ser usadas para o prognóstico de falha, como sugerido para trabalhos futuros. Palavras -Chaves: 1.Flape 2.PHM 3.SPC 4.Runger U² 5.Hotelling’s T² 1. Introdução O advento do desempenho dos processadores, dos sensores, das técnicas de monitoramento e dos métodos de filtragem e processamento de informações tornou possível o monitoramento e gerenciamento da saúde de sistemas complexos. O objetivo deste trabalho é apresentar a utilização de medidas estatísticas para monitoramento da condição de um sistema aeronáutico. As análises foram realizadas com base em simulações de um sistema de flape de uma aeronave no ambiente MATLAB/Simulink. Foram realizadas simulações do sistema normal e degradado. O modo de falha analisado foi o aumento do atrito dos mecanismos da superfície que podem levar a um travamento. A partir dos dados das simulações, técnicas de controle estatístico de processo multivariável foram utilizadas para detectar a condição do sistema. Uma análise de testabilidade e diagnosticabilidade também foi realizada visando se identificar os parâmetros com melhor sensibilidade a degradação e os instantes mais adequados para se adquirir as informações utilizadas no estudo. O restante deste artigo está organizado da seguinte forma: no capítulo 2 encontra-se um descritivo de um sistema típico de flape e o modelo MATLAB/SIMULINK em alto nível, no capítulo 3 é apresentado um descritivo da análise de testabilidade e diagnosticabilidade realizada a priori, no capítulo 4 é apresenta a parte teórica do controle estatístico de processo utilizado no estudo, no capítulo 5 é apresentado o estudo de caso e no capítulo 6 as conclusões para o estudo. 2. Sistema de Flape Flapes são superfícies de hiper-sustentação usadas por aeronaves de asa fixa para o aumento de sua sustentação em velocidades baixas, como na decolagem e pouso. Essas superfícies estão localizadas no bordo de fuga das asas e são acionadas seguindo um padrão baseado normalmente na fase de vôo e velocidade da aeronave. O movimento é iniciado pela ação do piloto na cabine da aeronave de acionar a alavanca de flap, e é controlado por um sistema de malha fechada para que a posição selecionada pelo piloto seja alcançada seguindo um perfil prédeterminado. As arquiteturas dos sistemas variam de aeronave para aeronave, porém normalmente são semelhantes à arquitetura apresentada na Figura 1. 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Figura 1. Estrutura Macro de um sistema de Flap 2.1. Modelo MATLAB/SIMULINK O modelo do sistema de Flape foi dividido em 5 grandes partes (Figura 2): • Alavanca de acionamento (bloco Flap Lever); • Sistema de Controle (bloco Control); • Sistema de Acionamento, alimentação e motor corrente contínua sem escova (bloco Inverter + Motor); • Caixa de redução (bloco Gearbox); • Superfície e sensor de posição (bloco Flap + Position Sensor). Figura 2. Modelo Sistema de Flap de um avião regional O sistema de flap é formado por um sistema de acionamento composto de dois motores de corrente contínua sem escova, controlados individualmente, ligados a um sistema de tubo de torque com uma caixa redutora interligando os sistemas das duas asas da aeronave. A validação do modelo foi realizada através de analise de similaridade com informações de testes de um sistema de atuação de uma aeronave regional. 3. Análise de testabilidade e diagnosticabilidade Inicialmente foi realizada uma análise de testabilidade e diagnosticabilidade que visa identificar os parâmetros com melhor sensibilidade a degradação e os instantes mais adequados para se adquirir as informações a serem utilizadas no estudo de caso. A Figura 3 apresenta a simulação do sistema de flap de um avião regional durante extensão dos flapes para a posição selecionada de 10° em diferentes condições de temperatura (-40°C e 21.11°C). Buscando um diagnóstico de falha incipiente (modo de falha de travamento da superfície), foram variados os atritos do sistema visando se observar parâmetros e intervalos adequados para se utilizar em estudos de diagnóstico e prognóstico de falha. As variações foram realizadas em intervalos constantes e até se chegar à iminência do travamento. 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Figura 3. Simulação para sistema sem degradação: Duas temperaturas -40°C e 21.11°C Os quatro parâmetros apresentados são de fácil entendimento nesse sistema, sendo o primeiro a corrente de controle (possível de ser medida em um sistema real e com boa sensibilidade a degradação), o segundo o torque requerido pela carga (não é fácil de ser medido em um sistema real, mas também tem boa sensibilidade), o terceiro a velocidade do motor (simples de ser medida, porém não apresenta variações significativas, pelo aumento de carga, até se atingir grandes níveis de degradação devido ao controle em malha fechada) e o quarto a posição (resultado do sensor de realimentação – também não apresenta variações até se atingir grandes níveis de degradação com o aumento de carga devido ao controle em malha fechada). Através desse estudo foi possível verificar quais as medidas que melhor indicavam a degradação relativa ao modo de falha considerado. Para o sistema de flape em questão foi verificado que a corrente de controle era o parâmetro adequado para o estudo, pois seria um parâmetro possível de se obter informações de campo com qualidade, dado que, para os outros parâmetros, como velocidade, seria preciso sensores com uma grande precisão e freqüência de amostragem devido a pouca sensibilidade a degradação. O aumento de precisão e de freqüência de amostragem vem atrelado a um alto custo do sistema de aquisição que precisa ser justificável a priori. 4. Aplicação de controle estatístico de processos para monitoramento da saúde de um sistema de flap O controle estatístico de processo, em inglês Statistical Process Control (SPC), usa ferramentas estatísticas para observar a performance do processo com o objetivo de detectar desvio significantes que possam corresponder a problemas no sistema controlado. Baseado no conceito de distâncias estatísticas Harold Hotelling desenvolveu um processo de controle que ficou conhecido como Hotelling’s T² em sua homenagem (Firat and Cilan, 2001). Esse processo é à base do nosso estudo de aplicação. Mahalanobis desenvolveu, mais ou menos na mesma época, uma distância estatística similar, sendo que as duas se correlacionam por uma constante (Firat and Cilan, 2001). O trabalho de Hottelling emergiu como uma medida de extrema utilidade para controle de processos de múltiplas variáveis, em inglês Multivariate SPC (MSPC). A técnica Hotelling’s T² se baseia em algumas premissas entre as quais estão a dependência linear entre as variáveis do processo e a suposição que as mesmas apresentam uma distribuição gaussiana. A suposição de variáveis com distribuição gaussiana também é de ampla abragência, dado que pelo teorema do limite central pode-se provar que sob certas condições a soma de um grande número de variáveis aleatórias é aproximadamente normalmente distribuída. Como na natureza os fenômenos dependem de diversos fatores, é razoável considerar uma distribuição gaussiana para diversos fenômenos físicos. Dentro de um controle estatístico de processo dois tipos de variações acontecem: • Variação de causa comum ou natural: são as variações típicas de temperatura, de densidade, do estado inicial do produto devido a tolerâncias no processo de fabricação, etc. • Variação por causa especial: são as variações fora das bases históricas ou comuns; variações decorrentes de degradações ou falhas. 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil As variações por causa comum são as que devem ser considerada durante a construção do modelo estatístico e sendo assim, é necessário a obtenção de dados que possuam uma ampla representatividade do sistema sob o funcionamento normal com suas diversas variações possíveis. As variações por causa especial serão as possíveis de serem detectadas através do controle estatístico do processo que se baseia em comparar o resultado obtido do modelo estatístico com um limite que pode ser definido ou não parametricamente. 4.1 Construindo o modelo estatístico O modelo estatístico é obtido através do calculo da média e da covariância dos dados obtidos sob a condição de controle e com suas variações por causa comum ou natural. As equações são as seguintes: (1) (2) (3) Onde: • • • • • X: matriz com as medidas dos parâmetros sob condições normais µ: vetor de média ∑: matriz de covariância n: número de amostras xi: colunas da matriz X. 4.2 Monitorando com Hotelling’s T² Com o padrão de normalidade estabelecido, o monitoramento dos novos dados pode ser realizado através da ) ao padrão, de acordo com o teste de Hotelling’s T² calculado conforme a distância estatística do novo ponto ( seguinte equação: (4) Onde: • T²: distância estatística de Hotelling 4.3 Limite para Hotelling’s T² O limite de comparação para se dizer que foi encontrada alguma anormalidade depende da equação a seguir, dado que as variáveis no processo de controle possuem função de densidade de probabilidade gaussiana (Tracy et. al. 1992). (5) Onde: • • tH: limite de comparação, em inglês threshold k: número de variáveis considerado • : função densidade de probabilidade F com coeficiente de confiança α, e graus de liberdade k e (n-k) 4.4 Monitorando com Runger U² G. C. Runger desenvolveu um método baseado no Hotelling’s T² que aumenta a sensibilidade da medida calculada aos fatores da causa da falha, dado que em seu estudo ele propôs um cálculo no qual se retira a contribuição das variáveis que não proporcionam variação de causa especial. Considerando as variáveis monitoradas, deve-se separar as mesmas em dois conjuntos, as que sofrem influência da falha/degradação e as que não sofrem influências. Das equações da seção 4.1 supondo que existam as variáveis “y”e “z”, onde “y” são influenciadas pela degradação e “z”não são, ter-se-ia os seguintes grupos: 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil (6) Onde: • : colunas do vetor Y • : colunas do vetor Z A idéia da estatística de Runger U² é a de calcular a estatística de Hotelling’s T² e subtrair a influência das variáveis “z” no calculo final da distância enquanto mantendo a influência de “z” no comportamento de “y” (Leão et al., 2009), conforme a equação a seguir: (7) Onde: • • • • • U²: distância de Runger U² T²: distância de Hotelling’s T² znovo: novo dado contendo apenas as variáveis não afetadas pela degradação µz: média das variáveis não afetadas pela degradação para as medidas utilizadas na construção do modelo estatístico ∑z: matriz de covariância das variáveis não afetadas pela degradação para as medidas utilizadas na construção do modelo estatístico • 4.5 Limite para Runger U² O limite de comparação para se dizer que foi encontrado alguma anormalidade depende da equação a seguir, dado que as variáveis no processo de controle possuem função de densidade de probabilidade gaussiana (Runger, 1996). (8) Onde: • • • • uH: limite de comparação, em inglês threshold k: número de variáveis considerado j: número de variáveis não afetadas pela degradação : função densidade de probabilidade chi-quadrada com coeficiente de confiança α, e graus de liberdade (k-j) 5. Estudo de Caso Após o estudo inicial de testabilidade e diagnosticabilidade apresentados na seção 3, verificou-se que a degradação do sistema de flap pode ser observada através do monitoramento de um parâmetro de fácil medição, que é a corrente de controle do motor. Para o estudo de caso foram realizadas simulações e análise supondo distribuições normais e uniformes para os parâmetros variáveis no sistema, e comparada a influência dessas suposições na eficiência e eficácia do método. 5.1 Utilizando Distribuição Normal Como descrito na seção 4 é necessário a obtenção de um conjunto de dados que possuam uma quantidade diversificada de condições normais do sistema para se construa um bom modelo estatístico e consequentemente se consiga a correta detecção da degradação. Os parâmetros considerados possíveis de variar no estudo foram a temperatura em que o sistema está submerso (afeta principalmente a dilatação/compressão dos componentes, as forças que agem sobre as superfícies e a viscosidade de fluidos – tudo considerado na tabela de torque de carga) e diferenças construtivas de cada sistema, modeladas através de um aumento de carga resultante de um atrito. Supondo uma distribuição normal para a variação desses parâmetros realizou-se as simulações para a obtenção das informações sob condições normais utilizadas na construção do modelo estatístico. 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Foram realizadas 200 simulações do modelo com os parâmetros obtidos de forma aleatória obedecendo a distribuição normal. A média da distribuição ficou em -10°C e 0,06 m²kg/s para a temperatura e coeficiente de atrito, respectivamente. O modelo estatístico se resume à matriz de covariância e ao vetor de média da temperatura média e da corrente de controle média no período de 3 a 4 segundos, que utilizados no cálculo das distâncias estatísticas formam um parâmetro de monitoramento e prognóstico com a evolução do sistema. O monitoramento do sistema foi realizado supondo uma degradação que foi injetada através do aumento do coeficiente de atrito viscoso em 5x10-4m²kg/s a cada nova simulação, partindo de um valor inicial que representa a tolerância construtiva considerada durante a fase de modelagem. Analisando os resultados das simulações observa-se a forma parabólica das curvas sendo essa uma característica dos métodos utilizarem distâncias quadráticas. Na Figura 4 essa característica fica clara devido à condição inicial do sistema, que apresenta uma qualidade de construção acima do normal e com isso, apresenta uma fase inicial de equiparação com a média da população para depois começar a fase que se considera a degradação que causa o aumento do risco de um travamento. Como limite de comparação foi utilizado os valores obtidos de forma paramétrica como em (5) e (8) considerando um grau de confiabilidade de 90%, 20 amostras e 2 graus de liberdade para Hotelling’s T² e 1 grau de liberdade para Runger U². Comparado os dois métodos a medida de Runger U² possui uma menor dispersão do que a medida de Hotelling’s T² e em ambos os casos analisados a medida de Runger U² detecta a degradação antes de Hotelling’s T². Com uma menor dispersão, diminuindo o número de falsos alarmes, e uma detecção mais rápida a medida de Runger U² apresenta características mais adequadas para prognóstico, como também mostrado em (Leão et. al., 2009). Com a temperatura no momento da indicação de degradação do sistema (-12.9°C) o sistema não demonstra nenhum tipo de redução de performance ou falha, como mostrado na Figura 5, porém mudando a condição de operação para 40°C o sistema apresenta saturação da corrente de controle e uma degradação do perfil de velocidade no final da rampa de acionamento, como mostrado na Figura 6. Figura 4. Fase de monitoramento: condição inicial afastada da média – modelo estatístico com variáveis normalmente distribuídas 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Figura 5. Condições do sistema de Flap com Temperatura = -12.9°C e Coeficiente de atrito = 0.1420 Figura 6. Condições do sistema de Flap com Temperatura = -40°C e Coeficiente de atrito = 0.1420 5.2 Utilizando Distribuição Uniforme Com o intuito de verificar a influência da suposição de distribuição gaussiana para as variáveis do sistema, realizou as mesmas simulações e processo realizado na seção anterior com dados não normalmente distribuídos e os resultados serão apresentados a seguir. Os dados para a obtenção do modelo estatístico foram obtidos de simulações com os dados que apresentavam uma distribuição aproximadamente uniforme. Os valores de Hotelling’s T² e Runger U² para os dados de construção do modelo estatístico estão apresentados nas Figura 7 e Figura 8, juntamente com os limites de comparação obtidos parametricamente como na seção anterior. Os limites parecem estar super estimados devido à distribuição utilizada não ser gaussiana. Uma forma de tornar o método mais robusto a problemas desse tipo poderia ser a obtenção de limites de forma não paramétrica para situação em que as variáveis não apresentem distribuição gaussiana. Figura 7. Hotelling’s T² para os dados de construção do modelo estatístico 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Figura 8. Runger U² para os dados de construção do modelo estatístico Figura 9 está o monitoramento dos novos dados supondo uma degradação linear no tempo como descrita na seção anterior. No instante da detecção o valor para Hotelling’s T² é 7,10 e o valor para Runger U² é 7,10, mostrando novamente que a medida de Hotelling’s T² está abaixo do limite de comparação não sendo ela a responsável pela detecção nesse caso. Figura 9. Fase de monitoramento: condição inicial afastada da média – modelo estatístico com variáveis uniformemente distribuídas Na Figura 10 está a simulação do sistema com as condições mais severa (-40°C), seguindo o mesmo critério que na seção anterior. Observa-se nesse caso, porém mais claramente do que os da seção anterior, que no momento da detecção, o sistema está bem degradado. Como se pode observar a utilização de um modelo estatístico obtido com dados considerando variáveis com distribuição aproximadamente uniforme e limites calculados de forma paramétrica como mostrado, proporcionam uma detecção da degradação mais tardia e sendo assim aumentando o risco de uma não detecção prévia a uma falha. Sendo assim, para o caso avaliado, se a distribuição é assumida erroneamente como gaussiana a detecção ainda ocorre antes do travamento, porém de uma forma mais tardia. 2009 Brazilian Symposium on Aerospace Eng. & Applications Copyright © 2009 by AAB rd 3 CTA-DLR Workshop on Data Analysis & Flight Control September 14-16, 2009, S. J. Campos, SP, Brazil Figura 10. Condições do sistema de Flap com Temperatura = -40°C e Coeficiente de atrito = 0.1960 6. CONCLUSÃO A utilização de apenas um parâmetro no monitoramento possibilita a detecção e o prognóstico de falhas, porém não possibilita a isolação da falha até a sua causa raiz. A detecção da falha/degradação foi realizada através de medidas de distâncias estatísticas conhecidas como Hotelling’s T² e Runger U², onde a segunda apresenta uma melhor sensibilidade a degradação do que a primeira. Esses métodos de distâncias estatísticas possuem algumas suposições de que as variáveis apresentam distribuição gaussiana, o que nos sistemas físicos é valido, dado que pelo teorema do limite central, a soma de variáveis aleatórias com distribuições quaisquer tendem a distribuições normais ou gaussianas. Como apresentado no estudo a não utilização de distribuição gaussiana diminui a eficiência do método, aumentando o risco de não detecção. Os próximos passos para continuação desse trabalho é a utilização de técnicas de prognóstico e cálculo da vida útil remanescente do sistema através de extrapolações das medidas de distância estatísticas. Também é possível a validação do método através de dados de campos e ampliação do estudo para degradações não lineares no tempo. 7. REFERENCES Firat, S. Umit Oktay; Cilan, Çigdem Aricigil, 2001, “Multivariate statistical process control methods and new approaches”, Proceedings of TQM World Congress 6, Saint Peterburg, pp. 239-246. Leão, Bruno P. et al., 2009, “Aircraft flap and slat system health monitoring using stastitical process control techniques”, Proceedings of IEEE Aeroespace Conference, Montana. Runger, G. C, 1996, “Projections and the U² multivariate control chart”, Journal of Quality Technology, v.28, n.3, pp. 313-319. Tracy, N. D. et al., 1992, “Multivariate control charts for individual observations”, Journal of Quality. Technology, v. 28, n.4, pp. 88-95. 8. RESPONSIBILITY NOTICE The authors are the only responsible for the material included in this paper.
Baixar