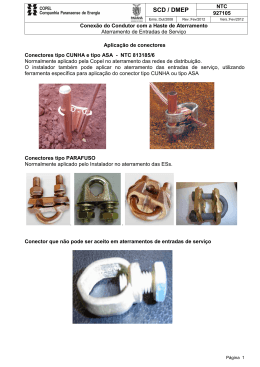
144 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 Utilização do Método FDTD em Coordenadas Não Ortogonais para Simular Estruturas de Aterramento Elétrico Rodrigo M. S. de Oliveira e Carlos Leonidas da S. S. Sobrinho Resumo — Neste trabalho, o método FDTD em coordenadas não ortogonais (LN-FDTD) foi implementado para a análise de estruturas de aterramento com geometrias coincidentes ou não com o sistema de coordenadas cartesiano. O método soluciona as equações de Maxwell no domínio do tempo, permitindo a obtenção de dados a respeito da resposta transitória e de regime das estruturas. O software desenvolvido foi testado e validado para o caso de um sistema de aterramento em forma de prato e para um eletrodo horizontal não alinhado com qualquer coordenada do sistema cartesiano. Palavras-chave — Método FDTD, Sistemas de Aterramento, Equações de Maxwell, Sistema de Coordenadas Não Ortogonais. S I. INTRODUÇÃO istemas de aterramento elétrico são indispensáveis para a proteção e manutenção do funcionamento de sistemas elétricos, bem como para a segurança de pessoas e de animais. De uma forma geral, esses sistemas consistem em dispositivos metálicos enterrados no solo que são conectados a algum dispositivo que se quer proteger eletromagneticamente. O principal objetivo é escoar correntes indesejadas para o solo da maneira mais eficiente possível. Existem diversas geometrias de sistemas de aterramento possíveis, tais como eletrodos horizontais e verticais, eletrodos circulares, esféricos, malhas de terra, entre várias outras. Deve-se ressaltar que o desempenho do sistema de aterramento depende também das características elétricas do solo (além, é claro, da geometria citada anteriormente). Para a obtenção da resposta completa de um dado sistema de aterramento (transitório e regime), modelos eletromagnéticos que solucionem as equações de Maxwell no domínio do tempo são desejáveis, de forma a representar com fidelidade a realidade. Dessa forma, é possível desenvolver estruturas de aterramento que respondam de forma próxima ao desejável para um dado sistema a custos reduzidos e com excelente precisão. As primeiras análises de malhas de terra foram feitas por Bewley [1][2] em 1934, trabalho no qual foram apresentadas investigações teóricas e experimentais de cabos contrapeso. Em 1943, eletrodos verticais foram investigados teoricamente Artigo recebido em 06 de maio de 2007. Laboratório de Análises Numéricas em Eletromagnetismo (LANE), Universidade Federal do Pará, caixa postal 8619, CEP 66075-907, Brasil; e-mails: [email protected], [email protected]. Este trabalho foi financiado pelo CNPq e Eletronorte. por Bellaschi e Armingtom [3]. Mais tarde, Sunde [4] aplica as Equações de Maxwell para demonstrar expressões para cálculo de respostas DC de várias estruturas de aterramento. A partir da década de 1980, a disponibilidade de computadores estimulou o uso de métodos numéricos na análise de estruturas de aterramento. Entre esses métodos, podem ser destacados: métodos de circuitos equivalentes [5]-[9], o método dos momentos [10]-[13], o método dos Elementos Finitos [14][15] e mais recentemente o método das Diferenças Finitas no Domínio do Tempo (FDTD) [16]-[18]. Em 2001, Tanabe publicou o artigo [17] no qual é demonstrado que o algoritmo de Yee [16] (o método FDTD) pode ser aplicado para analisar estruturas de aterramento coincidentes com o sistema cartesiano de coordenadas. Comparações dos resultados gerados com o método FDTD com medidas experimentais mostraram que o método FDTD pode ser aplicado com grande confiabilidade para esse tipo de problema, tanto para respostas de regime quanto para transitórios eletromagnéticos. Eletrodos auxiliares foram utilizados para medir a tensão e para aplicar a corrente, como ilustrado pela Fig. 1. Circuito de Corrente Circuito de Tensão V I + - Fig. 1. O Modelo experimental de Tanabe. Em [18], Tuma et al. propõem um modelo computacional baseado no algoritmo de Yee que elimina o eletrodo de potencial (o potencial é calculado em termos do campo elétrico) e o eletrodo de corrente (que é introduzido na região absorvente U-PML [18][19], simulando um canal de descarga de corrente natural), como ilustrado na Fig. 2. A importância desse modelo é ressaltada pela eliminação do acoplamento eletromagnético entre o sistema de aterramento analisado e o circuito de medição utilizado em [17]. MELO E SILVA DE OLIVEIRA AND LEONIDAS DA SILVA SOUZA : EMPLOYMENT OF THE FDTD 145 ∂H x 1 ⎛ ∂E y ∂E z ⎞ ⎟, − = ⎜⎜ ∂t ∂y ⎟⎠ μ ⎝ ∂z ∂H y 1 ⎛ ∂E z ∂E x ⎞ = ⎜ − ⎟, ∂z ⎠ μ ⎝ ∂x ∂t ∂H z 1 ⎛ ∂E x ∂E y ⎞ ⎟, − = ⎜⎜ ∂x ⎟⎠ ∂t μ ⎝ ∂y (3) (4) (5) e ⎞ ∂E x 1 ⎛ ∂H z ∂H y − − σE x ⎟⎟, = ⎜⎜ ∂t ∂z ε ⎝ ∂y ⎠ ∂E y 1 ⎛ ∂H x ∂H z ⎞ − − σE y ⎟, = ⎜ ∂t ∂x ε ⎝ ∂z ⎠ (6) (7) ⎞ ∂E z 1 ⎛ ∂H y ∂H x − − σE z ⎟⎟, = ⎜⎜ ∂t ∂y ε ⎝ ∂x ⎠ Fig. 2. Modelo Computacional (Tuma et al.). O eletrodo horizontal representa a estrutura de terra. (a) Representação tridimensional, (b) Um corte bidimensional detalhando o caminho de integração do campo elétrico. Dessa forma, neste trabalho, é proposta a aplicação do método FDTD em Coordenadas não ortogonais (LN-FDTD) [20] para reduzir a restrição relativa à modelagem da geometria dos sistemas de aterramento não compatíveis com o sistema cartesiano de coordenadas. Inicialmente, o algoritmo de Yee é apresentado no sistema de coordenadas retangulares. Posteriormente, as noções matemáticas relativas ao sistema de coordenadas não ortogonal são apresentadas, seguidas da sua aplicação ao algoritmo de Yee. São apresentados então os resultados obtidos e as considerações finais. II. OS MÉTODOS FDTD E LN-FDTD A. O algoritmo de Yee As equações de Maxwell que governam a propagação de ondas eletromagnéticas em meios isotrópicos, não dispersivos, e com perda elétrica, em sua forma diferencial no domínio do tempo, são dadas por: r r r ∂H (1) ∇ × E = −μ ∂t e r r r ∂E r (2) ∇× H = ε + J, ∂t r r nas quais E é o vetor intensidade de campo elétrico (V/m), H é o vetor intensidade de campo magnético (A/m), ε e μ são, respectivamente, permissividade elétrica (farad/m) e r permeabilidade magnética (henry/m) e J , o vetor densidade 2 de corrente elétrica de condução (A/m ). As equações (1) e (2), quando expandidas, geram as respectivas equações escalares (8) sendo Ex, Ey, Ez e Hx, Hy, Hz as componentes dos campos r r elétrico E e magnético H ,respectivamente. Essas componentes são, de uma forma geral, funções do tempo t e das três coordenadas cartesianas x, y e z. A equação (1), lei de Faraday, mostra que, quando há r r variação no tempo do vetor B = μH (vetor densidade de fluxo magnético), surgem componentes de campo elétrico circulando em torno da direção dessa variação. Dualmente, a lei de Ampère mostra que, quando há variação no tempo do r r vetor D = εE numa certa direção, essas causam circulação de campo magnético em torno da mesma direção. Essas duas observações sobre as equações (1) e (2) são os pilares de toda a teoria de propagação de ondas eletromagnéticas no universo macroscópico [21], nas quais Yee se baseou ao definir seu esquema de distribuição espacial e temporal das componentes de campo de seu algorítimo numérico. A disposição espacial dessas componentes está ilustrada na Figura 3: a célula ortogonal de Yee. z x y Ez Hx ∆z Hy Ey (i,j,k ) Hz Ex ∆x ∆y r r Fig. 3. Distribuição espacial das componentes dos campos E e H para a célula de Yee (i,j,k). Dessa forma, as versões discretas das equações escalares r r para as componentes x dos vetores E e H são dadas por 146 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 H n+ 1 2 1 1 x (i , j + ,k + ) 2 2 =H n− 1 2 1 1 x (i , j + ,k + ) 2 2 + ⎡ En 1 − En 1 ⎤ y (i , j + ,k ) ⎥ Δ t ⎢ y (i , j + 2 ,k +1) 2 + ⎢ ⎥ Δz μ ⎢⎣ ⎥⎦ (9) n ⎡ En ⎤ 1 −E 1 z (i , j ,k + ) ⎥ Δ t ⎢ z (i , j +1, k + 2 ) 2 − ⎢ ⎥, Δy μ ⎢⎣ ⎥⎦ e Δ ⎞ ⎛ ⎜1−σ t ⎟ 2 ε ⎟+ ⎜ E 1 =E 1 x ( i + , j ,k ) x ( i + , j ,k ) ⎜ Δt ⎟ 2 2 1 σ + ⎟ ⎜ 2ε ⎠ ⎝ 1 n+ ⎤ ⎡ n+ 12 2 ⎢ H z ( i + 1 , j + 1 ,k ) − H z ( i + 1 , j − 1 , k ) ⎥ Δt 2 2 2 2 ⎥ ⎢ + ⎥ Δ ⎞⎢ Δy ⎛ ε ⎜1 + σ t ⎟ ⎢ ⎥ 2ε ⎠ ⎣ ⎝ ⎦ n +1 Fig. 4. O sistema não ortogonal de coordenadas e os vetores unitários. n r Um conjunto de três vetores complementares a l pode ser definido de tal forma que cada um é normal a dois vetores unitários simultaneamente. Esse conjunto é definido matematicamente por (13). (10) 1 n+ ⎤ ⎡ n+ 12 2 ⎢ H y ( i + 1 , j ,k + 1 ) − H y ( i + 1 , j ,k − 1 ) ⎥ Δt 2 ⎥ 2 2 2 ⎢ , − ⎥ Δt ⎞ ⎢ Δz ⎛ ε ⎜1 + σ ⎟ ⎢ ⎥ 2ε ⎠ ⎣ ⎝ ⎦ de tal forma que a posição indexada por (i, j , k ) é relacionada a ( x, y , z ) por ( x = iΔ x , y = jΔ y e z = kΔ z ) e o tempo t é relacionado ao índice n por t = nΔ t . Para o esquema numérico ser estável, a condição de Courant é utilizada para determinar o passo temporal Δ t . Tal condição r r r r r r r1 a2 × a3 r 2 a3 × a1 r 3 a1 × a2 ,a = ,a = . a = g g g (13) Os vetores definidos por (13) formam a chamada base recíproca e são denominados de vetores recíprocos. Na Equação (13), g representa o determinante do tensor métrico [g] dado por r r ⎛ a1 ⋅ a1 ⎜r r [ g ] = ⎜ a2 ⋅ a1 ⎜ ar ⋅ ar ⎝ 3 1 r r a1 ⋅ a2 r r a2 ⋅ a2 r r a3 ⋅ a2 r r a1 ⋅ a3 ⎞ ⎛ g11 r r ⎟ ⎜ a2 ⋅ a3 ⎟ = ⎜ g 21 r r a3 ⋅ a3 ⎟⎠ ⎜⎝ g 31 g12 g 22 g 32 g13 ⎞ ⎟ g 23 ⎟. g 33 ⎟⎠ (14) é expressa por 1 Δt ≤ C 1 1 1 + 2+ 2 2 Δx Δy Δz De (14), nota-se que , Desenvolvendo o determinante de [g], Eq. (14), observa-se que r r r (16) g = a1 ⋅ (a2 × a3 ). na qual C é a velocidade da luz no vácuo. B. O sistema não ortogonal de coordenadas A Equação (16) mostra que Considerando um sistema de coordenadas curvilíneas formado por (u1 , u 2 , u 3 ) , como ilustrado pela Fig. 4, o vetor a3 comprimento diferencial de r , representado por dr , é dado por r 3 3 r ∂r r dr = ∑ l du l = ∑al du l . l =1 ∂u l =1 g é o volume do hexaedro r r r formado pelos vetores a1 , a2 e a3 (veja a Figura 5). r r (15) g ll =| al |2 . (11) a1 (12) a2 r Os vetores al são chamados vetores unitários e os mesmos formam a chamada base unitária. Como pode ser observado, r l os vetores al são tangentes aos eixos u e podem ser escritos como funções de x, y e z. Fig. 5. Vetores unitários em uma célula não ortogonal (malha estruturada). Usando a definição matemática (13), pode ser observado que: r r a l ⋅ am = δ l ,m , na qual δ l,m é a Função Delta de Konecker. (17) MELO E SILVA DE OLIVEIRA AND LEONIDAS DA SILVA SOUZA : EMPLOYMENT OF THE FDTD Uma definição métrica similar à introduzida pela Eq. (14) pode ser feita para os vetores recíprocos da seguinte maneira: r r g lm = a l ⋅ a m . 147 C. O Método FDTD em Coordenadas Não-Ortogonais... Para se obterem as componentes contravariantes do campo (18) r H , representadas por h l ( l = 1,2,3 ), a equação vetorial (1) Assim, com esses conceitos em mente, é possível expandir pode ser decomposta em vetores paralelos aos vetores a l usando-se a operação produto escalar. Dessa forma, sem perda de generalidade, para l = 1 , tem-se: r um vetor V usando vetores unitários e recíprocos, como mostrado em (19) (veja Eq.(12)), 3 r 3 r r V = ∑v l al = ∑vl a l , l =1 r r ⎛ ∂H ⎜⎜ − μ ∂t ⎝ (19) ⎞ r1 r r r 1 ⎟⎟ ⋅ a = ∇ × E ⋅ a . ⎠ ( l =1 v l e vl são chamados, respectivamente, de l 'ésima componente contravariante e l 'ésima componente co-variante r de V . Para calcular a l 'ésima componente contravariante do vetor r r r V , o produto escalar V ⋅ a l deve ser calculado. Dessa forma, Empregando as Equações (20) e (13), obtém-se: na qual usando as equações (17) e (19), verifica-se que: ⎛ ∂h1 ⎞ r r ⎜⎜ − μ ⎟ = ∇× E ∂t ⎟⎠ ⎝ ( r r é obtida por: r r ⎛ 3 r ⎞ r V ⋅ al = ⎜ ∑vl a l ⎟ ⋅ al = vl . ⎝ l =1 ⎠ (21) Pode-se obter uma relação para calcular as componentes cor variantes de V a partir de suas componentes contravariantes (e vice-versa). Se for calculado o produto escalar r r 3 r r V ⋅ am = (∑ v l al ) ⋅ am ( veja (21) e (14) ), obtém-se l =1 3 vm = ∑g lm v l . (22) ( r r r × a3 ⎞⎟ . g ⎟⎠ r r r r r r r r )( ) ( )( ) r Da Equação (19), nota-se que ∇ = ∑3 (∂/∂u l )ar l . Assim, l =1 empregando (17) que a primeira contravariante de e (21) ainda para o lado direto, verifica-se equação para a primeira componente r H é dada por: ∂h1 ∂e ⎞ ⎛ ∂e = −⎜ 32 − 23 ⎟ /( μ g ). ∂t ∂ ∂ u u ⎠ ⎝ (25) Desenvolvendo o mesmo procedimento para as demais r componentes de H , verifica-se que: Seguindo procedimento similar, chega-se a: ∂h 2 ⎛ ∂e ∂e ⎞ = −⎜ 13 − 31 ⎟ /( μ g ) ∂t ⎝ ∂u ∂u ⎠ (26) ∂h 3 ∂e ⎞ ⎛ ∂e = −⎜ 21 − 12 ⎟ /( μ g ). ∂t ⎝ ∂u ∂u ⎠ (27) e que v = ∑g vl . lm l =1 Finalmente, deve-se notar que os vetores (23) r r al e a l não apresentam necessariamente módulo unitário. Isso significa que as componentes ⎝ 2 r r r r r r r r ⎛ ∂h1 ⎞ ∇ ⋅ a2 E ⋅ a3 − ∇ ⋅ a3 E ⋅ a2 ⎜⎜ − μ ⎟= . ∂t ⎟⎠ g ⎝ l =1 3 r )⋅ ⎛⎜⎜ a Utilizando a identidade (A× B) ⋅ (C× D) = (A⋅C)(B⋅ D) −(A⋅ D)(B⋅C) no lado direito da equação anterior, chega-se a: r r ⎛ 3 r⎞ r V ⋅ a l = ⎜ ∑v l al ⎟ ⋅ a l = v l . (20) ⎝ l =1 ⎠ r De forma similar, a l 'ésima componente co-variante de V m ) r Para o campo E , chega-se a: vl e v l apresentam magnitudes dependentes do sistema de coordenadas. No entanto, r observando as expansões definidas por (19) e que g ll =| al |2 r e g ll =| a l |2 , os valores fisicos das componentes Vl e V l são calculados por: Vl = vl g ll e V l = v l g ll . (24) ε ∂e1 ⎛ ∂h ∂h ⎞ + σe1 = ⎜ 32 − 23 ⎟ / g , ∂t ∂u ⎠ ⎝ ∂u (28) ε ∂e 2 ⎛ ∂h ∂h ⎞ + σe 2 = ⎜ 13 − 31 ⎟ / g ∂t ⎝ ∂u ∂u ⎠ (29) ε ∂h ⎞ ∂e 3 ⎛ ∂h + σe3 = ⎜ 21 − 12 ⎟ / g . ∂t ⎝ ∂u ∂u ⎠ (30) e 148 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 As equações (25)-(30) podem ser aproximadas de forma usual por diferenças centradas. Desse modo, são obtidas as seguintes equações de atualização: 1 1 ( n+ ) 2 ( i , j ,k ) =h − Δt ⎡e ⎢ μ g ⎢⎣ −e Δu (n) 3( i , j , k ) 2 − e (n) 2( i , j , k +1) −e Δu ( n) 2( i , j , k ) 3 ⎤ ⎥, ⎥⎦ (31) − 1 2 ( n− ) 2 ( i , j ,k ) =h (n) (n) (n) (n) Δ t ⎡ e1(i , j ,k +1) − e1(i , j ,k ) e3(i +1, j ,k ) − e3( i , j ,k ) ⎤ − − ⎢ ⎥, Δu 1 Δu 3 μ g ⎢⎣ ⎥⎦ 1 3 ( n+ ) (32) 1 3 ( n− ) h( i , j ,k 2) = h(i , j ,k 2) (n) (n) ( n) ( n) Δ t ⎡ e2(i +1, j ,k ) − e2(i , j ,k ) e1( i , j +1,k ) − e1(i , j ,k ) ⎤ − − ⎥ ⎢ Δu 1 Δu 2 μ g ⎢⎣ ⎥⎦ e1(i(,nj +,k1)) ⎛ ⎜1−σ = e1(i(,nj ,)k ) ⎜ ⎜ ⎜1+ σ ⎝ Δt 2ε Δt 2ε e(2i ,( nj ,+k1)) 1 ( n+ ) 2 3( i , j , k ) ⎛ ⎜1−σ = e(2i ,( nj ,)k ) ⎜ ⎜ ⎜1+σ ⎝ Δt 2ε Δt 2ε e 1 (n+ ) ⎡ ( n + 12 ) ⎤ ⎢ h1( i , j ,k ) − h1( i , j2−1,k ) ⎥ ⎢ ⎥. 1 Δu 2 ⎞ ⎥ + Δ tσ ⎟ g ⎢ ⎣ ⎦ 2 ⎠ Δt ⎛ ⎜ε ⎝ Célula Secundária h3 1 ( n+ ) 2 3( i , j −1, k ) 2 e3 (34) e2 c h2 h1 e1 Célula Primária Fig. 6. Componentes Co-variantes em Células de Yee Não Ortogonais: r Célula Primária para o Campo Elétrico E e Célula Sencundária para o r Campo Magnético H . ⎞ ⎟ ⎟+ ⎟ ⎟ ⎠ 1 ( n+ ) ⎡ ( n+ 12 ) ⎤ 2 h h − ⎢ 1( i , j ,k ) 1( i , j ,k −1) ⎥ ⎢ ⎥ 1 Δu 3 ⎛ ⎞ ⎥ ⎜ ε + Δ tσ ⎟ g ⎢⎣ ⎦ 2 ⎠ ⎝ 1 ( n+ ) ⎡ ( n+ 12 ) ⎤ 2 − h h Δt ⎢ 3(i , j ,k ) 3( i , j −1,k ) ⎥ − ⎢ ⎥, 1 Δu 2 ⎞ ⎛ ⎥ ⎜ ε + Δ tσ ⎟ g ⎢⎣ ⎦ 2 ⎠ ⎝ Δt (33) (36) Como pode ser observado, as Equações (9)-(10) são similares às Equações (31)-(36). Deve ser notado que as componentes contravariantes dependem de componentes covariantes, as quais são calculadas através de (22). É apropriado dizer que Δul (l = 1, 2 e 3) são considerados unitários (iguais a um), já que as informações métricas da célula estão contidas no termo g [20]. ⎞ ⎟ ⎟+ ⎟ ⎟ ⎠ ⎡ ⎤ −h ⎢h ⎥ ⎢ ⎥ 1 u Δ ⎛ ⎞ ⎥ ⎜ ε + Δ tσ ⎟ g ⎢⎣ ⎦ 2 ⎝ ⎠ 1 ( n+ ) ⎡ ( n + 12 ) ⎤ 2 Δt ⎢ h2( i , j ,k ) − h2( i , j ,k −1) ⎥ − ⎢ ⎥, 1 Δu 3 ⎛ ⎞ ⎢ ⎥ ε σ g + Δ ⎜ t ⎟ ⎣ ⎦ 2 ⎝ ⎠ Δt ⎞ ⎟ ⎟+ ⎟ ⎟ ⎠ Δt (n) 3( i , j +1, k ) h Δt 2ε Δt 2ε 1 ( n+ ) ⎡ ( n + 12 ) ⎤ ⎢ h2( i , j ,k ) − h2( i −1,2 j ,k ) ⎥ ⎢ ⎥ 1 Δu 1 ⎛ ⎞ ⎥ ⎜ ε + Δ t σ ⎟ g ⎢⎣ ⎦ 2 ⎝ ⎠ 1 1 ( n− ) 2 ( i , j ,k ) h 1 2 ( n+ ) 2 ( i , j ,k ) e(3i (, nj ,+k1)) ⎛ ⎜1−σ = e(3i (, nj ,)k ) ⎜ ⎜ ⎜1+ σ ⎝ (35) r Malhas para as componentes co-variantes do campo E devem ser construídas de modo que as mesmas contornem de forma apropriada a geometria do problema a ser analisado. Tais malhas são chamadas de malhas primárias, compostas por células primárias (Fig. 6). Como pode ser observado pela Fig.6, os cantos das células secundárias (ponto C) são posicionados no centro das células primárias. Dessa forma, os pontos da malha secundária são calculados a partir dos dados da malha primária. D. A Fonte de Excitação e Cálculos de Correntes e Tensões Para garantir o significado físico dos cálculos, alguns detalhes devem ser observados para implementar a fonte de excitação e para calcular correntes e tensões. Tais detalhes são discutidos neste tópico. MELO E SILVA DE OLIVEIRA AND LEONIDAS DA SILVA SOUZA : EMPLOYMENT OF THE FDTD 1) Implementação da Fonte de Excitação: A função usada como fonte de excitação neste trabalho segue [17]. Ela é descrita pelas Equações (37) e (38), dadas em volts por: e, sabendo-se que I 3 pode ser calculado por I 3 = J 3Δs3 , onde r I3 = t − a1 −e t − a2 )sen 2 (Ωt ) (37) e se t ≥ 1.5T f : Vs (t ) = (Vpeak /Ao )(e nas t −e t − a2 a1 = 1,9315/T f , T − a1 0 −e T − a2 0 , Vs (t ) g 33( i , j ,k ) g (33i , j ,k ) . I1 = g11 ⎛ ∂h3 ∂h2 ⎞ 2 ⎜ 2 − 3 ⎟ g 22 g 33 − g 23 . u u ∂ ∂ g ⎝ ⎠ (43) r Br VBA = − ∫ E ⋅ dl . A temos: (39) Assim, é possivel controlar a magnitude física da tensão da fonte de excitação simplesmente pela especificação de Vs (t). 2) Cálculo de Correntes em Condutores Finos: Neste trabalho, condutores elétricos são considerados perfeitos. r Dessa forma, o cálculo da densidade corrente J que é conduzida por um fio pode ser realizado pela aplicação da lei de Ampère em sua forma original r r r J = ∇× H. (42) Usando (19) e (17) e considerando A e B dois pontos r vizinhos, localizados nos dois pontos que definem o vetor a j , Dessa forma, tem-se: e3 ( i , j ,k ) = g 22 ⎛ ∂h1 ∂h3 ⎞ 2 ⎜ 3 − 1 ⎟ g11 g 33 − g13 g ⎝ ∂u ∂u ⎠ 3) Cálculo de Tensões: A diferença de potencial entre dois pontos A e B, VBA , pode ser calculada pela Equação: que gera E3 ( i , j ,k ) (V/m), e, observando a equação Eq.(24), g (33i , j ,k ) , para dar o sentido físico à componente. I2 = e e3 (i , j ,k ) , Vs (t ) deve ser dividido pelo comprimento da aresta da célula em que tal componente está localizada, o qual é dado por g 33( i , j ,k ) , o por (40) B⎛ 3 r ⎞ r VBA = − ∫ ⎜ ∑ei a i ⎟ ⋅ a j = −e j . A ⎠ ⎝ i =1 r J3 = g 33 , é possível escrever: 1 ⎛ ∂h2 ∂h1 ⎞ ⎜ 1 − 2 ⎟ g 33 g ⎝ ∂u ∂u ⎠ (44) A Equação (44) não é válida para o caso no qual o ponto A está na superfície de um fio fino, como ilustrado pela Fig.7. Para esse caso, é necessário levar em conta o raio r do condutor. Dessa forma, a maneira mais simples de solucionar esse problema é calcular o valor físico Ej e a distância entre A r e B, d AB . Denominando esse potencial de VBA , obtém-se (veja (24) e (14)). r VBA = − E j d AB = −e j g jj ( ) g jj − r . Para o cálculo da terceira componente co-variante da r corrente de condução I , o seguinte procedimento pode ser empregado. Observando as Equações (19) e (30), pode ser notado que: r 1 ⎛ ∂h2 ∂h1 ⎞ r J3 = ⎜ 1 − 2 ⎟a3 . g ⎝ ∂u ∂u ⎠ Considerando que | a3 |= (41) De forma semelhante, chega-se a: ), a2 = 2,5584/Tt , Tt = 500 ×10 −6 , Ao = e T0 = ln(a1/a2 )/(a1 − a2 ) e Ω = π/(3T f ) . Para excitar, por exemplo, g 33 ⎛ ∂h2 ∂h1 ⎞ 2 ⎜ 1 − 2 ⎟ g11 g 22 − g12 . g ⎝ ∂u ∂u ⎠ (38) T f = 0,058 ×10 −6 , quais g 33 ⎛ ∂h2 ∂h1 ⎞ r r ⎜ 1 − 2 ⎟ | a1 × a2 | . g ⎝ ∂u ∂u ⎠ Finalmente, após o desenvolvimento algébrico da Equação acima, verifica-se que: I3 = − a1 r a área Δs3 é dada por Δs3 =| a1 × a2 | , tem-se: se t < 1.5T f : Vs (t ) = (Vpeak /Ao )(e 149 Fig. 7. A geometria considerada para calcular r . VBA (45) 150 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 III. RESULTADOS Este tópico mostra os resultados obtidos através do método FDTD em coordenadas não ortogonais e a comparação da resposta de regime com fórmulas disponíveis na literatura. A. Eletrodo Horizontal Neste tópico, são apresentados alguns resultados obtidos com o software desenvolvido em coordenadas gerais. Um eletrodo horizontal, com inclinação de 45° em relação ao eixo x, foi simulado e os resultados obtidos, como esperado, foram idênticos aos gerados com o FDTD convencional com o eletrodo orientado paralelamente a x Ou seja, o problema é independente do sistema de coordenadas, desde que o eletrodo esteja nas mesmas condições em relação ao solo. Em [22], um eletrodo horizontal de 1,5 metro de comprimento, enterrado a uma profundidade de 0,1m, foi simulado com um esquema de medição similar ao apresentado em [17] (Fig.1). Todavia, não foi feita uma análise a respeito da influência do eletrodo de injeção de corrente quando a haste está localizada a profundidades maiores. Dessa forma, foram simuladas várias situações de modo a se verificar o funcionamento do método e os resultados obtidos foram comparados com a Equação (46) [23], dada por: 1 [ln(2 L/a ) − 1] + 2πLσ 4h 2 + L2 ⎤ 1 ⎡ ⎛⎜ L + 4h 2 + L2 ⎞⎟ ⎢ln ⎥, + 2h/L − ⎟ L 2πLσ ⎢ ⎜⎝ 2h ⎥⎦ ⎠ ⎣ TABELA I COMPARAÇÃO ENTRE VALORES DE REGIME (EM OHMS) OBTIDOS POR SIMULAÇÕES FDTD TRADICIONAIS E PELA EQUAÇÃO ANALÍTICA PARA VÁRIAS PROFUNDIDADES DE ELETRODO HORIZONTAL ( L = 1,5m , a = 10mm E σ = 500 −1 S/m ) h (m) 1,50 1,25 1,00 0,75 0,50 0,25 LN-FDTD (Ω) 161,39 173,52 188,13 206,67 233,30 300,16 Eq.(46) (Ω) 276,06 270,49 270,33 274,70 284,52 307,96 Dif. Relativa 41,5 % 35,8 % 30,4 % 24,8 % 18,0 % 2,53 % Para efeito de comparação com (46), a tensão e a corrente foram calculadas em uma das extremidades do eletrodo horizontal, como ilustrado pela Fig.8. O campo elétrico foi integrado paralelamente ao solo, abaixo da superfície e de forma normal ao eletrodo de injeção (para o cálculo do potencial). Considerando o caso no qual L = h = 1,5m, a = 10 mm e σ = 500-1 siemens por metro, o resultado obtido é mostrado pela Fig.9, o qual concorda com a Eq. (46) no estado estacionário (veja também a Tabela I). R= (46) h na qual L é o comprimento do eletrodo, h é a profundidade na qual o eletrodo está enterrado, a é o raio do eletrodo e σ é a condutividade elétrica do solo (veja Fig.8). 272 Ω V/I (Ω) Iterações (3us) I V L Fig. 8. Eletrodo horizontal e o cálculo da corrente e da tensão. A Tabela I compara os resultados de regime obtidos utilizando-se o método ilustrado pela Fig.2 com os obtidos utilizando-se (46), para diversos valores de h (0,25 1,5 m). Observa-se que quanto maior a profundidade, maior a discordância entre os resultados. Isso se deve a dois motivos: 1) a Equação (46) foi desenvolvida para o eletrodo horizontal isolado, sem o cabo ou eletrodo de injeção e 2) como conseqüência do motivo citado anteriormente, o eletrodo de injeção contribui para reduzir o valor da resistência total vista pelo sistema de aterramento, que na verdade se comporta como um “L” em posição vertical. Dessa forma, é esperada a redução do valor V/I com a profundidade h. Fig. 9. Relação tensão/corrente em uma das extremidades do eletrodo horizontal colocado a 1,5 metro de profundidade (linha: método FDTD com eletrodo alinhado com o eixo x ; círculos: método LN-FDTD com eletrodo inclinado a 45 graus do eixo x). Observa-se que os métodos FDTD e LN-FDTD podem ser usados para identificar a influência de elementos como o cabo de conexão do sistema de aterramento. Deve-se ressaltar que os problemas simulados em [24] foram novamente testados com o software aqui desenvolvido utilizando-se o método LN-FDTD e resultados idênticos àqueles foram obtidos. B. Sistema de aterramento do tipo prato Para testar um caso bastante geral, foi escolhido para simulação o sistema de aterramento do tipo prato, ilustrado pela Fig.10. De acordo com o trabalho de Yung [25], o valor de regime para a relação tensão/corrente é dado pela Equação (47). MELO E SILVA DE OLIVEIRA AND LEONIDAS DA SILVA SOUZA : EMPLOYMENT OF THE FDTD ( )( 151 ) 13 a −0,818e −0,0093a 1 + e −1,427 h (47) 100σ Para esse caso, foi necessário construir uma malha circular específica, cujo corte horizontal está ilustrado pela Fig.11. Através dela, observa-se que foram utilizadas 22 células para modelar o diâmetro 2a da estrutura. As Figuras 12 e 13 mostram os resultados obtidos para a relação tensão/corrente para dois pratos a meio metro da superfície, num solo caracterizado pelos parâmetros σ = 2.28 × 10 −3 , ε r = 50 e μ = μ0 , com diâmetros R= 2a = 5,5 m e 2a = 8 m, respectivamente. Fig. 12. Relação Tensão/Corrente para um sistema de aterramento do tipo prato com h = 0,5m e diâmetro de 5,5m ( σ = 2.28 ×10 −3 e εr = 50). Fig. 10. Sistema de aterramento do tipo prato. Para esses dois casos, a Equação (47) fornece os valores 32,69 e 23,05 ohms, enquanto o método LN-FDTD resultou em 33,42 e 25 ohms, conforme mostram as Figuras 12 e 13, o que representa uma ótima aproximação numérica. Dessa forma, nota-se que o método LN-FDTD é uma poderosa ferramenta para análise de situações realísticas de sistemas de aterramento, especialmente para as que não possuem soluções analíticas e para a análise de transitórios. Fig. 11. Corte horizontal da malha gerada para simular o sistema de aterramento do tipo prato. Fig.13. Relação Tensão/Corrente para um sistema de aterramento do tipo prato com h = 0,5m e diâmetro de 8,0m ( σ = 2.28 ×10 −3 e εr = 50). IV. CONCLUSÕES Neste trabalho, foi desenvolvida uma nova metodologia para a análise de sistemas de aterramento solucionando-se as Equações de Maxwell no domínio do tempo em Coordenadas Gerais pelo método LN-FDTD. A vantagem desta formulação é que a mesma abre a possibilidade de modelar precisamente estruturas que não coincidam com o sistema de coordenadas cartesianos. Além disso, a formulação provê uma solução de onda completa para as equações de Maxwell no domínio do Tempo, na qual os fenômenos de reflexão, refração e difração são todos considerados implicitamente, o que implica soluções bastante realistas. Foi mostrado como realizar o cálculo de tensões e correntes (além da implementação da fonte) nesse sistema de coordenadas de forma a garantir a consistência das grandezas físicas. Foi demostrado que a técnica LN-FDTD pode ser aplicada para a solução desse tipo de problema (aterramento) através da simulação de estruturas simples, cuja solução é conhecida. Foram simulados: 1) eletrodo horizontal, para o qual inclinações em relação ao eixo x foram implementadas, com obtenção de resultados idênticos aos gerados pelo método 152 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 FDTD convencional e 2) um prato perfeitamente circular enterrado, sendo obtida uma excelente concordância com a Equação (47). Para a simulação desse problema (diâmetro de 5,5m), foram geradas cinco malhas com os seguintes números de pontos para representar o diâmetro do prato: 10, 15, 20, 30 e 40. Foi observado que, a partir de vinte pontos, os resultados obtidos não sofreram mudanças significativas, de forma que a convergência do método foi assegurada. Deve-se ressaltar que, como os problemas de aterramento são problemas abertos, há a necessidade de se restringir a região de análise, o que é feito aqui através da técnica de camadas perfeitamente casadas uniaxiais (técnica U-PML). A formulação U-PML em Coordenadas Gerais foi estendida para truncar meios condutivos (como o solo). AGRADECIMENTOS Os autores agradecem o suporte fornecido pela Eletronorte, pelo CNPq e pela UFPA. analysis of grounding systems in homogeneous and stratified soils using the FDTD method”, in International Symposium on Lightning Protection (SIPDA), Sao Paulo (Brazil), 2005. [19] J. F. Almeida, R. O. dos Santos, and C. L. da S. S. Sobrinho, “Computational technique to UPML absorbing boundary conditions by FDTD: A complete approach”, IEEE Latin America Transactions, vol. 3, no. 5, pp. 377–382, Dec. 2005. [20] A. Taflove and S. C. Hagness, Computational Electrodynamics, The Finite-Difference Time-Domain Method, 3rd ed. Artech House Inc., 2005. [21] J. D. Jackson, Classical Electrodynamics. Wiley, New York, 1962. [22] M. Tsumura, Y. Baba, N. Nagaoka, and A. Ametani, “FDTD Simulation of a Horizontal Grounding Electrode and Modeling of its Equivalent Circuit”, IEEE Transactions on Electromagnetic Compatibility, vol. 48, pp. 817–825, Nov. 2006. [23] M. A. Mattos, Técnicas de Aterramento. Okime Eletromagnetismo Aplicado, 2004. [24] E. T. Tuma, R. O. dos Santos, R. M. S. de Oliveira, and C. L. da S. S. Sobrinho, “Transient analysis of parameters governing grounding systems by the fdtd method”, IEEE Latin America Transactions, vol. 4, no. 1, pp. 55–61, March 2006. [25] E. K.-N. Yung and W.-Y. Tam, “Analysis of a circular earthing plate”, in IEE proceedings. Part C. Generation, transmission and distribution (IEE proc. C), 1989. REFERÊNCIAS [1] L. V. Bewley, “Theory and tests of the counterpoise”, Elec. Engr., pp.1163–1172, Aug. 1934. [2] L. V. Bewley, “The counterpoise”, G. E. Rev., vol. 37, pp. 73–81, 1934. [3] L. P. Bellaschi, “Impulse and 60-cycle characteristics of driven grounds, part III effect of lead in ground installation”, in AIEE Transactions, vol. 62, 1943, pp. 334–345. [4] E. D. Sunde, Earth conduction effects in transmission systems. by Bell Telephone Laboratories, 1949. [5] A. P. Meliopoulos and M. G. Moharam, “Transient analysis of grounding systems”, IEEE Trans. Power Apparatus and Systems, vol. PAS-02, No.2, pp. 389–399, 1983. [6] A. D. Papalexopoulos and A. P. Meliopulos, “Frequency dependent characteristics of grounding systems”, IEEE Trans. Power Delivery, vol. 2, pp. 1073–1081, 1987. [7] A. Geri, “Behaviour of grounding systems excited by high impulse currents: the model and its validation”, IEEE Trans. Power Delivery, vol. 14, No.3, pp. 1008–1017, 1999. [8] A. F. Otero, J. Cidras, and J. L. del Alamo, “Frequency-dependent grounding system calculation by means of a conventional nodal analysis technique”, IEEE Trans. Power Delivery, vol. 14, No.3, pp. 873–878, 1999. [9] J. Cidras, A. F. Otero, and C. Garrido, “Nodal frequency analysis of grounding systems considering the soil ionization effect”, IEEE Trans. Power Delivery, vol. 15, No.1, pp. 107–107, 2000. [10] L. Grcev and F. Dawalibi, “An electromagnetic model for transients in grounding system”, IEEE Trans. Power Delivery, vol. 5, pp. 1773–1781, 1990. [11] L. Grcev, “Computation of transient voltages near complex grounding systems caused by lightning currents”, in Proceedings of IEEE International Symposium on EMC, 92CH3169-0, 1992, pp. 393–399. [12] L. D. Grcev and F. E. Menter, “Transient electromagnetic fields near large earthing systems”, IEEE Trans. Magnetics, vol. 32, No.3, pp. 1525– 1528, 1996. [13] L. D. Grcev, “Computer analysis of transient voltages in large grounding systems”, IEEE Trans. Power Delivery, vol. 11, pp. 815–823, 1996. [14] B. Nekhoul, C. Cuerin, P. Labie, G. Meunier, and R. Feuillet, “A finite element method for calculating the electromagnetic fields generated by substation grounding systems”, IEEE Trans. Magnetics, vol. 31, No.3, pp. 2150–2153, 1995. [15] B. Nekhoul, P. Labie, F. X. Zgainski, and G. Meunier, “Calculating the impedance of a grounding system”, IEEE Trans. Magnetics, vol. 33, No.3, pp. 1509–1512, 1996. [16] K. Yee, “Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media”, IEEE Trans. Antennas and Propagation, vol. 14, pp. 302–307, 1966. [17] K. Tanabe, “Novel method for analyzing the transient behavior of grounding systems based on the finite-difference time-domain method”, CRIEPI Report – Tokio, 2001. [18] E. T. Tuma, R. M. S. de Oliveira, and C. L. da S. S. Sobrinho, “New model of current impulse injection and potential measurement in transient Rodrigo M. S. de Oliveira graduou-se em 2003 pela Universidade Federal do Pará (Brasil), alcançou o título de Mestre em 2004 e busca o grau de Doutor pela mesma instituição (Engenharia Elétrica). Possui experiência em calibração de grandezas elétricas, obtida nas Centrais Elétricas do Norte do Brasil. Desde 2002, faz parte do Laboratório de Análises Numéricas em Eletromagnetismo (LANE). Atualmente, realiza pesquisas nas áreas de aterramento elétrico, técnicas de otimização e antenas com o método FDTD. Carlos Leonidas da S.S. Sobrinho graduou-se em 1981 em Engenharia Elétrica pela Universidade Federal do Pará (Brasil), obteve seu título de Mestre em 1989 pela Universidade Católica do Rio de Janeiro (PUC-RJ) e o grau de Doutor em Engenharia Elétrica pela Universidade Estadual de Campinas (Unicamp), em 1992. Em 1999, concluiu seu pós-doutorado na Inglaterra (Queen Mary Westfield – University of London). Sua pesquisa envolve espalhamento eletromagnético, guias de onda, propagação eletromagnética, descargas atmosféricas, antenas, estruturas periódicas, métodos numéricos e sistemas de aterramento.
Download