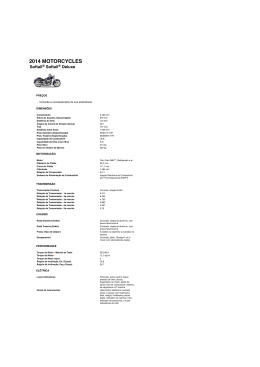
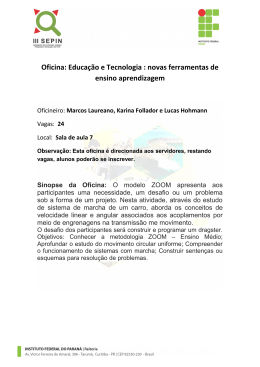
n Donald A. Neumann CINESIOLOGIA do APARELHO MUSCULOESQUELÉTICO Fundamentos para Reabilitação TRADUÇÃO DA 2ª EDIÇÃO capa.indd 1 26/5/2011 09:25:31 Características Especiais 200 Seção II Extremidade Superior Capítulo 8 Ilustrações em cores trazem a cinesiologia à realidade e proporcionam ao leitor uma compreensão completa dos conceitos do livro. Braquial Bíceps Braquiorradial Braquiorradial FIGURA 6-36. Vista lateral, mostrando a linha de força dos três flexores primários do cotovelo. O braço de momento (linhas pretas espessas) de cada músculo é desenhada segundo uma escala aproximada. Note que o cotovelo foi flexionado a cerca de 100 graus, colocando o tendão do bíceps a 90 graus de inserção no rádio. Veja maiores detalhes no texto. O eixo mediolateral de rotação do cotovelo é mostrado, atravessando o capítulo. Cirurgia de “Transferência de Tendão” para Restaurar Equilíbrio Cinético e Função na Mão Parcialmente Desnervada: um Olhar sobre a Cinesiologia Subjacente Os nervos mediano, ulnar e radial são vulneráveis a lesões, uma vez que correm através de todo o membro superior. Os nervos podem ser gravemente comprimidos ou estirados, lacerados por osso fraturado ou penetrados por objetos estranhos, incluindo vidro, faca ou um projétil. Esses mesmos nervos também podem ser comprometidos em neuropatias. Lesões ou patologias comprometendo esses nervos periféricos podem causar graus variados de paralisia muscular, perda de sensibilidade e alterações tróficas na pele. Os prejuízos resultantes de uma lesão ou neuropatia de nervo periférico podem ter efeitos funcionais devastadores sobre a região comprometida do corpo. Especialmente com lesões de nervos periféricos, certas ações musculares do punho e da mão podem ser completamente perdidas. Além disso, a pele na região associada se torna vulnerável a lesões em razão da perda de sensibilidade. A paralisia muscular seletiva resulta em um desequilíbrio cinético através da articulação ou articulações, aumentando, desse modo, a probabilidade de deformidade. Consideremos, por exemplo, uma laceração completa do nervo mediano ao nível do punho. A paralisia dos músculos da eminência tenar pode incapacitar completamente o importante movimento de oposição do polegar. Sem intervenção terapêutica, o polegar também pode desenvolver uma contratura em adução e rotação lateral em virtude da tração sem oposição de (1) o nervo ulnar — adutor do polegar inervado —, e (2) o nervo radial — extensor longo do polegar inervado. Essa deformidade é a antítese da posição de oposição. A lesão dos principais nervos do membro superior frequentemente resulta em um padrão previsível de paralisia muscular, perda sensitiva e deformidade potencial. (Ilustrações neuroanatômicas como as contidas no Apêndice II, Parte B podem servir como guias úteis para prever quais músculos podem ser paralisados depois de uma lesão nervosa.) A regeneração de um nervo traumatizado com retorno de função motora e sensitiva é fisiologicamente possível; entretanto, a extensão do crescimento neuronal depende de vários fatores, incluindo a continuidade da bainha de tecido conjuntivo (tubo endoneural) que circunda os axônios individuais. Lesões de esmagamento e tração que deixam intacto o tubo endoneural mas destroem o axônio têm um melhor prognóstico de regeneração.96 Após uma completa laceração do axônio e tubo endoneural, o reparo cirúrgico do nervo é um prérequisito necessário para a regeneração. Em circunstâncias ideais, um nervo periférico pode se regenerar a uma velocidade de cerca de 1 mm/dia (ou cerca de 2,5 cm/mês). Durante esse tempo, os terapeutas Torque (kg-cm) FIGURA 6-35. O músculo braquiorradial direito é mostrado “em evidência” sobre o cotovelo, durante uma ativação isométrica de esforço máximo. Torque Gerado pelos Músculos Flexores do Cotovelo A Figura 6-36 mostra a linha de força dos três flexores primários mários do cotovelo. A força do torque de flexão varia consideravelmente lmente de acordo com a idade,23 sexo, treinamento muscular,76 velocidade ocidade de contração muscular e posicionamento das articulações ões no membro superior.84 De acordo com um estudo relatado porr Gallagher e colaboradores,23 o lado dominante produzia níveis signifi signifififlexão. cativamente mais altos de torque, trabalho e potência à flexão. Porém, não foram observadas diferenças significativas entre a extensão do cotovelo e a pronação e supinação do antebraço. aço. Em indivíduos saudáveis de meia-idade, foram relatados torques de flexão em esforço máximo de 725 kg-cm para homenss e 336 kg-cm para mulheres (Tabela 6-6).4 Estes dados mostram que os torques de flexão são cerca de 70% maiores do que os de extensão. tensão. Porém, no joelho, que é funcionalmente análogo ao cotovelo velo na extremidade inferior, o diferencial de força favorece os músculos úsculos extensores, em magnitudes aproximadamente similares. É provável rovável que esta diferença seja devida ao fato que as demandas funcionais cionais impostas aos flexores do cotovelo são relativamente maiores ores do que aquelas impostas aos flexores do joelho. Os torques de flexão do cotovelo produzidos durante a supinação do antebraço são cerca de 20% a 25% maiores do que aqueles observados durante a pronação total da articulação..62 Esta dicular diferença se deve, principalmente, à maior distância perpendicular Homens Mulheres Flexão Extensão Pronação Supinação 725 (154) 421 (109) 73 (18) 91 (23) 336 (80) 210 (61) 36 (8) 44 (12) Dados de Askew LJ, An KN, Morrey BF, Chao EY: Isometric elbow strength in normal individuals, Clin Orthop Relat Res 222:261, 1987. Os desvios-padrão estão entre parênteses. Os resultados foram obtidos de 104 indivíduos saudáveis; X idade homens = 41 anos,X idade mulheres = 45,1 anos. O cotovelo é mantido em 90 graus de flexão, com rotação neutra do antebraço. Os dados mostrados são apenas do membro dominante. N N-m/kg-cm. F O Q U E E S P E C I A L 5 - 3 Conversões: E 0,098 Capítulo 5 Complexo do Ombro 137 O “Ajuste Frouxo” da Articulação Glenoumeral: um Problema de Instabilidade Inerente E N F O Q U E E S P E C I A L 6 -4 VBBraquial: ra o Maior Trabalhador dentre os Flexores do árias características anatômicas da articulação glenoumeral (GU) contribuem para um esquema que favorece a mobilidade e desfavorece a estabilidade. A superfície articular da cavidade glenoide cobre Cotovelo somente aproximadamente um terço da superfície articular da cabeça umeral. Essa diferença de tamanho permite que uma opequena da lém de ter a maior área de secção transversal, músculoparte braquial cabeça umeral contatoo com cavidadedeglenoide qualquer tambémfaça apresenta maiora volume todos osemflexores do posição do ombro. umO adulto o diâmetro longitudinal da cotovelo (Tabela Em 6-5). volumenormal, muscular pode ser medido pelo cabeça umeral é aproximadamente 1,9 vez do 3que o diâmetro registro do volume de água deslocado O maior volume pelo maior músculo. longitudinal cavidade 5-24). Ouma diâmetro transverso da muscularda apresenta maior capacidade de sugere que oglenoide músculo(Fig. cabeça umeral aproximadamente vezes maioro “maior do quetrabalhador” o diâmetro trabalho. Poréesta razão, o braquial2,3 é considerado 6 transverso oposto da cavidade glenoide. é frequentedentre os do cotovelo. Isto Asearticulação deve, em GU parte, à grande flexores mente descritadecomo umadoarticulação bolatambém e soquete, essa capacidade trabalho músculo, mas a seuembora envolvimento descrição dêtodos a impressão de quedea flcabeça úmero caiba exão dodocotovelo, sejam ativo em os tipos errônea de atividades dentro darealizados cavidade de glenoide. A real ou estrutura articulaçãoàGU parece estes forma rápida lenta oudacombinados supinação mais uma bola uma moedaà de 25o e àcom pronação. Umade vezgolfe que opressionada braquial se contra insere distalmente ulna, centavos de dólar. Esta formaouóssea oferecenão pouca ou nenhuma estamovimento de pronação supinação influencia seu compribilidade articulação vezdedisso, a integridade mecânica da mento,à linha de forçaGU; ou em braço momento. articulação é mantida principalmente por meio de mecanismos envolvendo os músculos adjacentes e os ligamentos capsulares. Por muitas razões, os ligamentos capsulares podem não conseguir suportar e estabilizar adequadamente a articulação GU. Essa falta de suporte é manifestada por excessiva translação da cabeça umeral. Embora algum grau de frouxidão seja normal na articulação GU, a frouxidão excessiva não é.201 Uma condição de frouxidão excessiva ou “jogo articular”, associada a amplas translações do úmero proximal relativas à glenoide, é frequentemente relatada como uma instabilidade do ombro. Um diagnóstico de instabilidade do ombro tipicamente significa que a frouxidão excessiva está associada a dor, apreensão ou perda de função.76 Apesar de a instabilidade da articulação GU poder ocorrer em múltiplas direções, a maioria dos casos exibe movimentação exces- siva anterior e inferiormente. Em alguns casos, uma articulação GU instável pode contribuir para subluxação ou deslocamento. A subluxação na articulação GU é definida como uma separação incompleta das superfícies articulares, frequentemente seguida por realinhamento espontâneo. O deslocamento na articulação GU, ao contrário, é definido como uma separação completa das superfícies articulares sem realinhamento espontâneo. Normalmente, uma articulação deslocada precisa ser rearticulada por uma manobra de manipulação realizada por outra pessoa ou pelo próprio indivíduo. A instabilidade da articulação GU está frequentemente associada a um alinhamento menor do que o ideal e uma interrupção da artrocinemática que, com o tempo, pode dar lugar a um estresse que danifica os tecidos moles articulares. Não é sempre claro se a instabilidade do ombro é mais o resultado ou a causa da artrocinemática anormal. A patomecânica da instabilidade do ombro é pouco compreendida e ocupa um lugar de destaque no interesse de terapeutas, pesquisadores e cirurgiões.16,25,201 No fim das contas, a estabilidade na articulação GU é alcançada por uma combinação de mecanismos passivos e ativos. Os mecanismos ativos dependem das forças produzidas pelo músculo. Essas forças são fornecidas principalmente pela natureza envolvente do grupo do manguito rotador. Os mecanismos passivos, por outro lado, dependem principalmente mais de outras forças do que da atividade muscular. Em uma articulação GU, os mecanismos passivos incluem (1) restrição produzida pela cápsula, ligamentos, lábio glenoidal e tendões; (2) suporte mecânico indicado na postura escapulotorácica; e (3) pressão intracapsular negativa. Por causa da variabilidade e da complexidade da maioria dos movimentos de ombro, uma combinação de mecanismos passivos e ativos é tipicamente necessária para garantir a estabilidade articular. Esse importante e multifacetado tópico sobre estabilidade da articulação GU será um tema recorrente por todo o capítulo. A frequentemente assumem um importante papel terapêutico, incluindo educar o paciente acerca da condição médica, ministrar exercícios selecionados de fortalecimento e alongamento, desenvolver um treinamento para compensar fraqueza muscular persistente e aplicar talas para reduzir a deformidade e ajudar ou compensar o movimento ativo perdido. Em casos nos quais a paralisia após lesão nervosa parece permanente, os cirurgiões podem realizar uma “transferência de tendão”.92 Esse procedimento cirúrgico muda o trajeto do tendão de um músculo inervado de tal maneira que toda ou partes das ações perdidas do músculo paralisado sejam restauradas. Uma cirurgia de transferência de tendão é particularmente indicada quando a paralisia diminui significativamente o desempenho de uma função importante — como a perda da oposição do polegar. Uma transferência de tendão para restaurar oposição do polegar é chamada oponenteplastia. Embora muitos tipos de técnicas de oponenteplastia tenham sido descritas, um método comum envolve redirecionar cirurgicamente o tendão do flexor superficial dos dedos (do dedo anular) para o polegar (Fig. 8-62, A).33 A divisão natural no tendão superficial é expandida e, a seguir, o tendão dividido é suturado a ambos os lados da articulação MCF do polegar, no ponto de fixação do abdutor curto do polegar. Em uma tentativa de imitar a linha de força dos músculos tenares paralisados, o tendão transferido é preso por uma polia de tecido conjuntivo à inserção distal do músculo flexor ulnar do carpo. A restauração da abdução e da rotação medial do polegar é essencial para o sucesso da operação (Fig. 8-62, B). Os terapeutas precisam desenvolver métodos criativos para treinar pacientes para usar a unidade musculotendínea transferida para desempenhar sua nova ação. O treinamento é grandemente melhorado se o paciente tiver pelo menos sensibilidade parcial nos dedos comprometidos e se o músculo transferido for um sinergista natural daquele paralisado. Diversos tipos diferentes de cirurgias de transferência de tendão foram desenvolvidos durante os anos para uso após lesão nervosa na extremidade superior distal.9,10,33 A escolha específica da cirurgia depende da localização e da extensão do dano nervoso, da perda de função, da quantidade de sensibilidade residual e da amplitude de movimento passivo das articulações comprometidas. Igualmente importante é a disponibilidade de uma unidade musculotendinosa para transferência cirúrgica. De particular interesse para o cirurgião é o potencial de torque máximo do músculo transferido. Uma vez que o Quadros de Conexões Clínicas Adicionais realçam ou expandem um conceito clínico particular associado com a cinesiologia analisada no capítulo. Continua Li ga me ômio nto A cr co ço subacrom rac pa ial oa Es cro mi al Conexões Clínicas Adicionais CONEXÃO CLÍNICA 8-1 TABELA 6-6. Média de Torques Internos Isométricos Máximos pelo Cotovelo e Antebraço Movimento 289 Mão L O N G I VERSO NS T TRA U D I N A L Quadros de Enfoque Especial apresentam numerosos exemplos clínicos de como aplicar a cinesiologia discutida à prática clínica. L O N G I TRANS T U VER SO D I N A L Processo coracoide Tendão do bíceps braquial (cabeça longa) Lábio glenoidal Cápsula inferior FIGURA 5-24. Vista lateral da articulação glenoumeral direita com a articulação aberta para expor as superfícies articulares. Note a extensão do espaço subacromial abaixo do arco coracoacromial. Normalmente esse espaço é preenchido com o músculo supraespinal e seu tendão, e a bursa subacromial. Os diâmetros longitudinal e horizontal estão ilustrados em ambas as superfícies articulares. Capítulo 8 1 Compare a mobilidade relativa permitida nos arcos transversos 4 5 6 7 8 C a p í t ulo 9 4 11 12 13 14 15 um osso metacárpico fraturado em uma posição de flexão da articulação metacarpofalangeana e quase extensão da articulação interfalangeana. Qual é a razão para assim proceder? Que músculo poderia eventualmente tornar-se retesado (contraído) a partir desta posição paliativa prolongada? Uma pessoa com um nervo ulnar lesado ao nível do osso pisiforme tipicamente mostra acentuada fraqueza da adução da articulação carpometacarpiana do polegar. Por que seria isso? Que músculo poderia substituir uma parte da perda de adução nessa articulação? De que modo a estrutura articular em forma de sela da articulação carpometacarpiana do polegar influencia a artrocinemática da flexão e extensão e da abdução e adução? Classifique a mobilidade passiva das articulações carpometacarpianas da mão em ordem crescente. Qual é o significado funcional desse padrão de mobilidade? Um paciente mostra pronunciada fraqueza em movimentos ativos de abdução e adução dos dedos e para fazer uma “pinça de chave”. Além disso, o paciente mostra atrofia do músculo da eminência hipotenar e sensibilidade diminuída na margem ulnar da mão e antebraço distal. Com base na informação apresentada no Apêndice II, Partes A a D, que raízes espinhais são mais provavelmente associadas a esses prejuízos? Suponhamos que uma pessoa tem um tendão flexor profundo dos dedos (FPD) lacerado no nível da polia A4. Além disso, a pessoa relata que as tentativas de cerrar um punho resultam em extensão em vez de flexão da articulação interfalangeana distal do dedo anular. (Essa observação é muitas vezes chamada pelos clínicos “extensão paradoxal”.) Favor oferecer uma possível explicação cinesiológica para este fenômeno. Respostas às perguntas de estudo podem ser encontradas no fim do livro. 168 Seção III Extremidade Su Superior REFERÊNCIAS 1. Abboud JA, Soslowsky LJ: Interplay of o the static and dynamic restraints in glenohumeral instability. Clin Ortho Orthop Relat Res 48-57, 2002. 2. Alberta FG, Elattrache NS, Mihata T, et al: Arthroscopic anteroinferior suture plication resulting in decreas decreased glenohumeral translation and external rotation. Study of a cadaver m model. J Bone Joint Surg Am 88:179INTRODUÇÃO À BIOMECÂNICA: 187, 2006. AS LEIS DE NEWTON: PRINCÍPIOS Quadros de Referência Espacial, 87 ENCONTRANDO AS SOLUÇÕES, 96KN, Browne AO, Korinek S, et al FUNDAMENTAIS DE BIOMECÂNICA, 77 Forças e Torques, 88 3. An al: Three-dimensional kinematics of 9 glenohumeral elevation. J Orthop Ress 9:143-149, 1991. Análise Estática, 97 Leis do Movimento de Newton, 78 Métodos Gráficos e Matemáticos de Análise 4. Problemas, Andrews JR, Carson WG Jr, McLeod WD: Glenoid labrum tears related Orientações para a Solução de A Primeira Lei de Newton: Lei da Inércia,78 de Força, 88 to the long head of the biceps. Am J Sports Med 13:337-341, 1985. 98 A Segunda Lei de Newton: Lei da Contrastando Forças e Torques Internos 5. Bagg SD, Forrest WJ: A biomechan biomechanical analysis of scapular rotation Análise Dinâmica, 104 Aceleração, 79 versus Externos, 91 scapular plane. Am J Phys Med Rehabil Sistemas de Medida Cinemática,during 104 arm abduction in the scapul A Terceira Lei de Newton: Lei da A Influência da Mudança do Ângulo da 67:238-245, 1988. Sistemas de Medida Cinética, 106 Ação-Reação, 83 Articulação, 92 6. Bagg SD, Forrest WJ: Electromyograp Electromyographic study of the scapular rotators Comparando Dois Métodos para a during arm abduction in the scapular plane. Am J Phys Med 65:111-124, CONEXÕES CLÍNICAS ADICIONAIS, 108 INTRODUÇÃO À ANÁLISE DO MOVIMENTO: Determinação do Torque ao Redor de 1986. RESUMO, 112 AJUSTANDO O LOCAL PARA ANÁLISE, 83 uma Articulação, 93 7. Barber FA, Ryu RK, Tauro JC: Should first time anterior shoulder dislocaREFERÊNCIAS, 112 Antropometria, 84 Aplicação de Torques Externos tions be surgically stabilized? Arthrosc Arthroscopy 19:305-309, 2003. QUESTÕES PARA ESTUDO, 1138. Barnes CJ, Van Steyn SJ, Fischer RA: T Diagrama de Corpo Livre, 84 Manualmente durante o Exercício e o The effects of age, sex, and shoulder Passos para a Construção do Diagrama de Teste de Força, 94 dominance on range of motion of th the shoulder. J Shoulder Elbow Surg Corpo Livre, 86 10:242-246, 2001. 9. Basmajian JV, Bazant FJ: Factors preve preventing downward dislocation of the adducted shoulder joint. J Bone Joint S Surg Am 41:1182-1186, 1959. 10. Bey MJ, Elders GJ, Huston LJ, et aal: The mechanism of creation of superior labrum, anterior, and posterior posterio lesions in a dynamic biomechanical model of the shoulder: The role of inferior subluxation. J Shoulder Elbow uitas abordagens de tratamento utilizadas na reabilitamais complexas descritas neste capítulo; no entanto, entender o Surgg 7:397-401, 1998. Bigliani LU,das Kelkar R, Flatow EL, et aal: Glenohumeral stability. Biomeção física estão baseadas em análises e descrições preciquadro conceitual das computações, apreciando 11. a magnitude chanical properties of passive and acti active stabilizers. Clin Orthop Relat Res sas do movimento humano. Partindo da avaliação forças que existem dentro do corpo e aplicando os conceitos con330:13-30, 1996. dessas análises e descrições, os danos e as limitações funcionais tidos neste capítulo é essencial para entender as técnicas deLU, reabi12. Bigliani Kurzweil PR, Schwartzba Schwartzbach CC, et al: Inferior capsular shift podem ser identificados, diagnósticos e prognósticos nas disfunlitação. Tal entendimento torna o trabalho clínico interessante e procedure for anterior-inferior shoulde shoulder instability in athletes. Am J Sports ções dos movimentos podem ser formulados, intervenções podem proporciona ao especialista um arsenal flexível, variado e rico de 1994. Medd 22:578-584, 13. Boardman ND, Debski RE, Warner JJJ, et al: Tensile properties of the ser planejadas e o progresso pode ser avaliado. No entanto, o moviideias de tratamento. superior glenohumeral and coracohu coracohumeral ligaments. J Shoulder Elbow mento humano é geralmente bastante complexo, normalmente Surgg 5:249-254, 1996. influenciado por uma interação vertiginosa de fatores ambientais, 14. Borstad JD: Resting position variab variables at the shoulder: Evidence to AS LEIS DE NEWTON: PRINCÍPIOS FUNDAMENTAIS psicológicos, fisiológicos e mecânicos. Na maioria das vezes, a support a posture-impairment associa association. Phys Ther 86:549-557, 2006. análise de movimentos complexos é simplificada: inicia-se com DE BIOMECÂNICA 15. Borstad JD, Ludewig PM: The effect o of long versus short pectoralis minor resting length on scapular kine kinematics in healthy individuals. uma avaliação básica das forças atuantes de dentro e de fora do Orthop Sports e Phys Therr 35:227-238, 22005. Biomecânica é o estudo das forças que são aplicadasJ ao exterior corpo e estuda-se os efeitos dessas forças em corpos rígidos hipoté16. Brophy Marx RG: Osteoarthritis following shoulder instability. Clin ao interior do corpo e a reação do corpo a essas forças. No RH, século ticos. As leis de movimento de Newton ajudam a explicar a relação Sports Medd 24:47-56, 2005. XVII, Sir Isaac Newton observou que as forças estavam relacionaentre as forças e seus efeitos nas articulações individuais, bem como 17. Brunnstrom S: Muscle testing aroun around the shoulder girdle. J Bone Joint das à massa e ao movimento em uma via muito previsível. Seu no corpo como um todo. Mesmo em um nível básico de análise, Surg Am 23:263-272, 1941. Philosophiae Naturalis Principia Mathematica (1687)18.forneceu as Nirschl leis RP, Guidi EJ: Deb esta informação pode ser usada para guiar as decisões do tratamento Budoff JE, Debridement of partial-thickness tears the rotator acromioplasty. Long-term follow-up and básicas e os princípios de mecânica que formam a of pedra funda-cuff without acromio e para a compreensão dos mecanismos de lesão. Uma análise of the literature. J Bone Joint Su Surg Am 80:733-748, 1998. mental para entender o movimento humano. Essas review leis, referidas simples da força linear e do torque, por exemplo, fornece uma 19. Burkart AC, Debski RE: Anatomy aand function of the glenohumeral como lei da inércia, lei da aceleração e lei da ação-reação, são conheestimativa das forças atuantes na articulação do quadril durante um ligaments in anterior shoulder instab instability. Clin Orthop Relat Res 32-39, cidas coletivamente como leis do movimento e formam o quadro a exercício de elevação da perna estendida que pode necessitar de 2002. partir do qual as técnicas de análise do movimento avançado modificações na presença de artrite ou lesão. Especialistas experien20. Burkhart SS,são Morgan CD, Kibler WB WB: The disabled throwing shoulder: derivadas. Spectrum of pathology. Part I: Pathoan Pathoanatomy and biomechanics. Arthrostes em reabilitação raramente realizam a maioria das computações copy 19:404-420, 2003. 21. Burkhead WZ Jr, Rockwood CA Jr: Tr Treatment of instability of the shoul77 der with an exercise program. J Bone JJoint Surg Am 74:890-896, 1992. 22. Buttaci CJ, Stitik TP, Yonclas PP, Foy Foye PM: Osteoarthritis of the acromioclavicular joint: A review of anato anatomy, biomechanics, diagnosis, and treatment. Am J Phys Med Rehabill 83:7 83:791-797, 2004. 23. Chansky HA, Iannotti JP: The vascula vascularity of the rotator cuff. Clin Sports Medd 10:807-822, 1991. 24. Chant CB, Litchfield field R, Griffi fin S, Tha Litchfi Thain LM: Humeral head retroversion in competitive baseball players and its relationship to glenohumeral rotation range of motion. J Orthop Sports Phys Ther 37:514-520, 2007. 25. Chen S, Haen PS, Walton J, Murrell GA: The effects of thermal capsular shrinkage on the outcomes of arthroscopic stabilization for primary anterior shoulder instability. Am J Sports Med 33:705-711, 2005. 26. Churchill RS, Brems JJ, Kotschi H: Glenoid size, inclination, and version: An anatomic study. J Shoulder Elbow Surg 10:327-332, 2001. 27. Conway AM: Movements at the sternoclavicular and acromioclavicular joints. Phys Ther 41:421-432, 1961. VISÃO GERAL DO CAPÍTULO neumann000.indd i muscular depois de uma (a) neuropatia ulnar e (b) neuropatia mediana de longa duração. O adutor do polegar é um músculo forte que exige inserções ósseas proximais estáveis. Depois de rever as fixações proximais do osso, diga se esse requisito foi satisfeito. Que movimentos na articulação carpometacarpiana do polegar constituem oposição? Que músculos são mais responsáveis pela execução desses movimentos individuais? Descreva o trajeto do músculo lumbrical do dedo indicador, desde sua inserção proximal à distal. Explicar como esse músculo pode flexionar a articulação metacarpofalangeana e simultaneamente estender as articulações interfalangeanas. A Figura 8-42 mostra a linha de força do extensor longo do polegar, do extensor curto do polegar e do abdutor longo do polegar na articulação carpometacarpiana. Dos três músculos, qual (a) é capaz de adução, (b) é capaz de abdução, e (c) não tem nenhum dos dois potenciais? Finalmente, quais desses músculos são capazes de estender a articulação carpometacarpiana? Qual é o papel dos lumbricais e interósseos na abertura da mão (i.e., estendendo os dedos)? Contraste a mecânica patológica subjacente às deformidades de pescoço de cisne e de botoeira. Qual dos três músculos intrínsecos ilustrados na Figura 8-48 tem o maior braço de momento para flexão da articulação metacarpofalangeana do indicador? Princípios Biomecânicos PETER R. BLANPIED, PT, PhD DEBORAH A. NAWOCZENSKI, PT, PhD M 297 10 Os clínicos frequentemente imobilizam a mão de uma pessoa com proximal e distal da mão. 2 Liste as regiões dentro da mão nas quais você mais esperaria atrofia 3 Quadros de Visão Geral do Capítulo apresentam uma lista dos tópicos importantes que serão explorados. Mão Q U E STÕE S PAR A E STU D O 28. Cools AM, Witvrouw EE, Declercq GA, et al: Scapular muscle recruitment patterns: Trapezius muscle latency with and without impingement symptoms. Am J Sports Med 31:542-549, 2003. 29. Cooper DE, Arnoczky SP, O’Brien SJ, et al: Anatomy, histology, and vascularity of the glenoid labrum. An anatomical study. J Bone Joint Surg Am 74:46-52, 1992. 30. Corteen DP, Teitge RA: Stabilization of the clavicle after distal resection: A biomechanical study. Am J Sports Med 33:61-67, 2005. 31. Costic RS, Vangura A Jr, Fenwick JA, et al: Viscoelastic behavior and structural properties of the coracoclavicular ligaments. Scand J Med Sci Sports 13:305-310, 2003. 32. Crosbie J, Kilbreath SL, Hollmann L, York S: Scapulohumeral rhythm and associated spinal motion. Clin Biomech (Bristol, Avon) 23:184-192, 2008. 33. Curl LA, Warren RF: Glenohumeral joint stability. Selective cutting studies on the static capsular restraints. Clin Orthop Relat Res 330:54-65; 1996. 34. de Freitas V, Vitti M, Furlani J: Electromyographic analysis of the levator scapulae and rhomboideus major muscle in movements of the shoulder. Electromyogr Clin Neurophysiol 19:335-342, 1979. 35. DePalma AF: Degenerative changes in sternoclavicular and acromioclavicular joints in various decades. Springfield, Ill, 1957, Charles C Thomas. 36. Debski RE, Parsons IM, Woo SL, Fu FH: Effect of capsular injury on acromioclavicular joint mechanics. J Bone Joint Surg 83:1344-1351, 2001. 37. Debski RE, Sakone M, Woo SL, et al: Contribution of the passive properties of the rotator cuff to glenohumeral stability during anterior-posterior loading. J Shoulder Elbow Surg 8:324-329, 1999. 38. Debski RE, Weiss JA, Newman WJ, et al: Stress and strain in the anterior band of the inferior glenohumeral ligament during a simulated clinical examination. J Shoulder Elbow Surg 14:24S-31S, 2005. 39. Debski RE, Wong EK, Woo SL, et al: An analytical approach to determine the in situ forces in the glenohumeral ligaments. J Biomech Eng 121:311-315, 1999. 40. Decker MJ, Hintermeister RA, Faber KJ, Hawkins RJ: Serratus anterior muscle activity during selected rehabilitation exercises. Am J Sports Med 27:784-791, 1999. 41. Decker MJ, Tokish JM, Ellis HB, et al: Subscapularis muscle activity during selected rehabilitation exercises. Am J Sports Med 31:126-134, 2003. 42. Dessaur WA, Magarey ME: Diagnostic accuracy of clinical tests for superior labral anterior posterior lesions: A systematic review. J Orthop Sports Phys Ther 38:341-352, 2008. 43. Deutsch A, Altchek DW, Schwartz E, et al: Radiologic measurement of superior displacement of the humeral head in the impingement syndrome. J Shoulder Elbow Surg 5:186-193, 1996. 44. Diederichsen LP, Nørregaard J, Krogsgaard M, et al: Reflexes in the shoulder muscles elicited from the human coracoacromial ligament. J Orthop Res 22:976-983, 2004. 45. Dillman CJ, Fleisig GS, Andrews JR: Biomechanics of pitching with emphasis upon shoulder kinematics. J Orthop Sports Phys Ther 18:402-408, 1993. 46. Dvir Z, Berme N: The shoulder complex in elevation of the arm: a mechanism approach. J Biomech 11:219-225, 1978. 47. Ebaugh DD, McClure PW, Karduna AR: Effects of shoulder muscle fatigue caused by repetitive overhead activities on scapulothoracic and glenohumeral kinematics. J Electromyogr Kinesiol 16:224-235, 2006. 48. Ebaugh DD, McClure PW, Karduna AR: Scapulothoracic and glenohumeral kinematics following an external rotation fatigue protocol. J Orthop Sports Phys Ther 36:557-571, 2006. 49. Ebaugh DD, McClure PW, Karduna AR: Three-dimensional scapulothoracic motion during active and passive arm elevation. Clin Biomech (Bristol, Avon) 20:700-709, 2005. 50. Ekstrom RA, Bifulco KM, Lopau CJ, et al: Comparing the function of the upper and lower parts of the serratus anterior muscle using surface electromyography. J Orthop Sports Phys Ther 34:235-243, 2004. 51. Ekstrom RA, Donatelli RA, Soderberg GL: Surface electromyographic analysis of exercises for the trapezius and serratus anterior muscles. J Orthop Sports Phys Ther 33:247-258, 2003. 52. Ellenbecker TS, Mattalino AJ: Concentric isokinetic shoulder internal and external rotation strength in professional baseball pitchers. J Orthop Sports Phys Ther 25:323-328, 1997. 53. Endo K, Yukata K, Yasui N: Influence of age on scapulo-thoracic orientation. Clin Biomech (Bristol, Avon) 19:1009-1013, 2004. Questões para Estudo elaboradas para desafiar o leitor a rever ou reforçar os principais conceitos contidos no capítulo. Referências demonstram a extensa abordagem baseada em evidência deste livro-texto. 5/10/2011 11:45:48 AM neumann000.indd ii 5/10/2011 11:45:55 AM CINESIOLOGIA do APARELHO MUSCULOESQUELÉTICO Fundamentos para Reabilitação 2ª Edição DONALD A. NEUMANN, PT, PhD, FAPTA Professor Department of Physical Therapy and Exercise Science Marquette University Milwaukee, Wisconsin Ilustrações principais por: ELISABETH ROEN KELLY, BSc, BMC CRAIG KIEFER, MAMS KIMBERLY MARTENS, MAMS CLAUDIA M. GROSZ, MFA, CMI neumann000.indd iii 5/10/2011 11:46:22 AM 2011 Elsevier Editora Ltda. Tradução autorizada do idioma inglês da edição publicada por Mosby – um selo editorial Elsevier Inc. Todos os direitos reservados e protegidos pela Lei 9.610 de 19/02/1998. Nenhuma parte deste livro, sem autorização prévia por escrito da editora, poderá ser reproduzida ou transmitida sejam quais forem os meios empregados: eletrônicos, mecânicos, fotográficos, gravação ou quaisquer outros. ISBN: 978-85-352-3966-9 Copyright © 2010, 2002 by Mosby, Inc., an affiliate of Elsevier Inc. Ilustrações de abertura de Conexões Clínicas Adicionais nos capítulos 5-15: Barcsay J: Anatomy for the Artist, ed 2, London, 1958, Spring Books This edition of Kinesiology of the Musculoskeletal System, 2st edition by Donald A. Neumann is published by arrangement with Elsevier Inc. ISBN: 978-0-323-03989-5 Capa Interface/Sergio Liuzzi Editoração Eletrônica Futura Elsevier Editora Ltda. Conhecimento sem Fronteiras Rua Sete de Setembro, nº 111 – 16º andar 20050-006 – Centro – Rio de Janeiro – RJ Rua Quintana, nº 753 – 8º andar 04569-011 – Brooklin – São Paulo – SP Serviço de Atendimento ao Cliente 0800 026 53 40 [email protected] Preencha a ficha de cadastro no final deste livro e receba gratuitamente informações sobre os lançamentos e promoções da Elsevier. Consulte também nosso catálogo completo, os últimos lançamentos e os serviços exclusivos no site www.elsevier.com.br NOTA O conhecimento médico está em permanente mudança. Os cuidados normais de segurança devem ser seguidos, mas, como as novas pesquisas e a experiência clínica ampliam nosso conhecimento, alterações no tratamento e terapia à base de fármacos podem ser necessárias ou apropriadas. Os leitores são aconselhados a checar informações mais atuais dos produtos, fornecidas pelos fabricantes de cada fármaco a ser administrado, para verificar a dose recomendada, o método e a duração da administração e as contraindicações. É responsabilidade do médico, com base na experiência e contando com o conhecimento do paciente, determinar as dosagens e o melhor tratamento para cada um individualmente. Nem o editor nem o autor assumem qualquer responsabilidade por eventual dano ou perda a pessoas ou a propriedade originada por esta publicação. O Editor CIP-BRASIL. CATALOGAÇÃO NA FONTE SINDICATO NACIONAL DOS EDITORES DE LIVROS, RJ N411c Neumann, Donald A. Cinesiologia do aparelho musculoesquelético / Donald A. Neumann ; [tradução de Renata Scavone de Oliveira... et al.]. - Rio de Janeiro : Elsevier, 2011. il. Tradução de: Kinesiology of the musculoskeletal system 2/E Apêndice Inclui bibliografia ISBN 978-85-352-3966-9 1. Cinesiologia. 2. Mecânica humana. 3. Sistema musculoesquelético - Doenças - Pacientes - Reabilitação. 4. Sistema musculoesquelético - Fisiologia. 5. Biomecânica. 6. Movimento. I. Título. 11-0814 neumann000.indd iv .CDD: 613.76 CDU: 612.7 5/10/2011 11:46:33 AM REVISÃO CIENTÍFICA SUPERVISOR Victor Hugo do Vale Bastos Especialista em Neurofisiologia pelo Instituto Brasileiro de Medicina de Reabilitação (IBMR), Rio de Janeiro Professor Adjunto do Departamento de Fisioterapia da Universidade Federal dos Vales do Jequitinhonha e Mucuri (UFVJM) / Docente do programa Multicêntrico de pós-graduação em Ciências Fisiológicas - Diamantina - Minas Gerais Doutor em Saúde Mental pelo IPUB/UFRJ Mestre em Motricidade Humana pela UCB Revisores Científicos Dionis de Castro Dutra Machado (Caps. 1-3) Professora Substituta do departamento de fisioterapia da Universidade Federal dos Vales do Jequitinhonha e Mucuri (UFVJM) Doutoranda em Saúde Mental pela UFRJ Mestre em Saúde Mental pela UFRJ Especialista em Fisioterapia em Traumato-Ortopedia pela UCB Especialista em Anatomia e Biomecânica Humana pela UCB Juliana Bittencourt (Caps. 6, 11, 16) Graduada em Fisioterapia pelo Centro Universitário Serra dos Órgãos - UNIFESO Formação em Reeducação Postural Global pelo método RPG/RPM Mestranda em Mapeamento Cerebral e Integração Sensório Motora - IPUB/UFRJ Julio Guilherme Silva (Caps. 13 e 14) Doutor em Saúde Mental/Aprendizagem Motora pela UFRJ Professor Adjunto do Curso de Fisioterapia da Universidade Federal do Rio de Janeiro Professor do Mestrado em Ciências da Reabilitação do Centro Universitário Augusto Motta (UNISUAM), RJ Coordenador dos Cursos de Especialização em Fisioterapia Traumato-ortopédica e Fisioterapia Neurofuncional na Universidade Gama Filho (UGF) Luiz Carlos Soares de Oliveira (Caps. 4 e 12) Professor da Faculdade de Reabilitação do ASCE Mestre do Programa de Pós-graduação Strictu Sensu em Neurologia e Neurociência da Universidade Federal Fluminense (UFF) Especialista em Fisioterapia Neurofuncional pela Associação Pestalozzi de Niterói, RJ Luiz Claudio Miana de Faria Furtado (Caps. 9, 10) Fisioterapeuta pela Universidade Gama Filho Mestre em Ciência da Motricidade Humana pela Universidade Castelo Branco (UCB) Osteopata D.O. pela Escola Brasileira de Osteopatia (EBOM) Professor da formação em Osteopatia da Escola Brasileira de Osteopatia (EBOM) Silmar Silva Teixeira (Caps. 7 e 8) Coordenador e Professor da Graduação em Fisioterapia pela Universidade Veiga de Almeida (UVA) Coordenador do Curso de Pós-graduação Lato Sensu de Fisioterapia em Ortopedia e Traumatologia e Fisioterapia em Home Care - UVA Professor da Pós-graduação Lato Sensu UFRJ/UGF e Associação Pestalozzi de Niterói Doutorando em Saúde Mental pela UFRJ Mestre em Ciência da Motricidade Humana pela UCB Victor Hugo do Vale Bastos (Caps. 5 e 15) neumann000.indd v 5/10/2011 11:46:33 AM TRADUÇÃO Andreia Oliveira Bento Alves (Cap. 5) Pós-graduada em Fisioterapia em Unidade de Terapia Intensiva Pós-graduada em Acupuntura Especialista em Auriculoterapia Especialista em Reeducação Postural Global Graduada em Fisioterapia pela UFRJ Arajany Coelho (Caps. 4, 11) Especialista em Tratamento Neuroevolutivo (Conceito Bobath) Graduada em Fisioterapia pela UFRJ Douglas Arthur Omena Futuro (Caps. 9, 10) Graduado em Ortopedia pela Universidade Gama Filho - Rio de Janeiro - RJ Eneida Ritsuko Ono Kageyama (Caps. 14, 15) Mestre em Ciências pela Faculdade de Medicina da USP Lucia Helena Dias de Oliveira Bastos (Caps. 12, 13) Professora Convidada da Pós-Graduação de Fisioterapia Neurológica da UGF e de Fisioterapia Traumato-Ortopédica da UGF Mestre em Psicologia da Saúde Pós-Graduada em Docência Superior Fisioterapeuta do Hospital Estadual Getúlio Vargas e do Instituto Nacional de Traumatologia e Ortopedia Mônia Sartoratto (Cap. 7) Fisioterapeuta pela Universidade Adventista de São Paulo (UNASP) Nelson Gomes de Oliveira (Cap. 8) Médico do Trabalho da PETROBRAS Renata Scavone (Caps. 1-3, 6) Médica Veterinária formada pela FMVZ-USP Doutora em Imunologia pelo ICB-USP Tatiana Ferreira Robaina (Índice) Cirurgiã-dentista pela Universidade Federal de Pelotas-UFPEL Especialista em Metodologia do Ensino pela Universidade Federal do Mato Grosso do Sul-UFMS Especialista em Estomatologia pela Universidade Federal do Rio de Janeiro-UFRJ Mestrado em Patologia Bucal pela Universidade Federal Fluminense-UFF Doutoranda em Microbiologia pela Universidade Federal do Rio de Janeiro-UFRJ Professora Substituta de Estomatologia da Faculdade de Odontologia da Universidade Federal do Rio de Janeiro-UFRJ neumann000.indd vi 5/10/2011 11:46:33 AM Para aqueles cujas vidas foram fortalecidas pelas dificuldades e alegrias do aprendizado neumann000.indd vii 5/10/2011 11:46:36 AM neumann000.indd viii 5/10/2011 11:46:37 AM O Autor Donald A. Neumann Don nasceu na cidade de Nova York, Estados Unidos, e era o mais velho de cinco irmãos. Ele é filho de Charles J. Neumann, meteorologista, cujo trabalho na previsão de furacões é mundialmente conhecido, e que viveu por 60 anos sob os efeitos da pólio, contraída durante “caçadas a furacões” no Mar do Caribe, na década de 1950. Don cresceu em Miami, na Flórida, onde se localiza o United States Weather Bureau e sua mãe, Betty, e seu pai moram lá até hoje. Logo após terminar o ensino médio, Don sofreu um grave acidente de moto. Depois de muita fisioterapia, ele a escolheu como profissão. Em 1972, começou a estudar e a praticar a fisioterapia, sendo graduado assistente de fisioterapeuta pelo Miami Dade Community College em um curso de 2 anos. Em 1976, Don foi graduado bacharel em fisioterapia pela University of Florida. Começou a trabalhar como fisioterapeuta no Woodrow Wilson Rehabilitation Center no estado americano da Virgínia, onde se especializou na reabilitação de pacientes com lesões na medula espinal. Em 1980, Donald entrou na University of Iowa, onde fez mestrado em educação científica e doutorado em ciência do exercício. Em 1986, Don começou sua carreira acadêmica como docente, escritor e pesquisador no Department of Physical Therapy da Marquette University. Como professor, seus esforços se concentraram na cinesiologia por esta se relacionar à fisioterapia, à anatomia e à reabilitação de indivíduos com lesões medulares. Don continuou atuando como fisioterapeuta em período parcial, até 2002, trabalhando principalmente na área de reabilitação após lesões medulares, ortopedia ambulatorial e geriatria. Hoje, segue sua carreira acadêmica como professor em tempo integral na Marquette University. O Dr. Neumann recebeu muitos prêmios por sua bolsa em fisioterapia (www.marquette.edu). Além de receber muitas conedecorações de prestígio por sua atuação como docente e pesquisador da American Physical Therapy Association, o Dr. Neumann recebeu o Prêmio de Docente do Ano na Marquette University em 1994 e, em 2006, foi nomeado Professor Universitário do Ano de Wisconsin pela Carnegie Foundation. Em 2008, Donald passou a integrar a American Physical Therapy Association. Ao longo dos anos, os projetos de pesquisa e docência do Dr. Neumann foram financiados pela National Arthritis Foundation e pelos Paralyzed Veterans of America. Ele publicou muitos trabalhos acerca de métodos de proteção de quadris artríticos ou dolorosos por forças lesivas. Don recebeu diversas Bolsas Fullbright para lecionar cinesiologia na Kaunas Medical University, na Lituânia (2002), na Semmelweis Medical University, em Budapeste, Hungria (2005 e 2006), e na Shinshu University, em Matsumoto, Japão (2009 e 2010). Em 2007, Neumann recebeu o título de doutor honorário da Lithuanian Academy of Physical Education, localizada em Kaunas, na Lituânia. Donald é também editor associado do Journal of Orthopaedic & Sports Physical Therapy. Don vive com sua esposa, Brenda, e dois cães em Wisconsin; seu filho, Donald Jr. (“Donnie”) e a família, assim como sua enteada, Megann, também moram em Wisconsin. Fora do trabalho, Donald gosta de fotografia, música de vários estilos e montanhismo, além de prestar muita atenção ao tempo. Sobre as Ilustrações A coleção de arte desta edição sofreu uma extensa transformação desde a primeira edição. Parte desta arte é nova, outra foi bastante modificada e quase todas as ilustrações foram colorizadas. Muitas das mais de 700 ilustrações são originais, produzidas durante a compilação das duas primeiras edições deste texto. As ilustrações foram primeiramente concebidas pelo Dr. Neumann e, então, meticulosamente transformadas em seu estado pré-coloração pela talentosa Elisabeth Roen Kelly. O Dr. Neumann ix neumann000.indd ix 5/10/2011 11:46:37 AM x Sobre o autor declarou: “A arte direcionou muito de minha escrita. Tinha que entender completamente um dado conceito cinesiológico, em seu nível mais essencial, para explicar a Elisabeth o que, exatamente, precisava ser desenhado. Neste sentido, as ilustrações me mantiveram honesto; somente escrevi o que realmente entendi.” O Dr. Neumann e a Sra. Kelly produziram três formas primárias de ilustrações para este texto. Elisabeth desenhou a anatomia de ossos, articulações e músculos à mão, criando detalhadíssimas ilustrações à pena e tinta (Figura 1). Estas ilustrações eram iniciadas por uma série de esboços a lápis, muitas vezes baseados em espécimes anatômicos cuidadosamente dissecados pelo Dr. Neumann. O uso de pena e tinta foi decidido para dar ao material uma qualidade orgânica e clássica. Nesta edição, estes desenhos foram coloridos por uma equipe talentosa e dedicada: Craig Kiefer, Kimberly Martens (do estúdio Martens & Kiefer) e Claudia Grosz. Craig Kiefer, que liderou a equipe de colorização, trabalhou diligente- Bainhas digitais fibrosas Ligamento colateral (partes cordão e acessória) Placas palmares Bainha digital fibrosa o 2 Ligamentos metacarpais transversos profundos m Tendão flexor profundo dos dedos po ar ac et Tendão flexor superficial dos dedos FIGURA 1 mente com o Dr. Neumann para desenvolver um processo de adição de cor que mantivesse a integridade do traçado original da Sra. Kelly. A segunda forma de arte usada foi a sobreposição de mídias artísticas, integradas através do uso de um software de computação (Figura 2). Muitas vezes, Neumann e Kelly começavam com uma fotografia que era transformada em um traçado simplificado de um indivíduo realizando um dado movimento. Imagens de ossos, articulações e músculos foram, então, eletronicamente inseridas no esboço humano. A sobreposição de diversas imagens biomecânicas realçou, ainda mais, a ilustração resultante. O desenho final mostra conceitos biomecânicos específicos e, muitas vezes, bastante complexos, de maneira relativamente simples, preservando a forma e a expressão humanas. A coloração final foi habilmente feita, principalmente, pela equipe de Kiefer, Martens e Grosz. neumann000.indd x 5/10/2011 11:46:37 AM xi Sobre o autor A B Esternocleidomastóideo Trapézio superior Trapézio medial Esplênio da cabeça e esplênio cervical Músculos transversoespinais (multífidos) Longuíssimo da cabeça Latíssimo do dorso Transverso do abdome Oblíquo interno do abdome Oblíquo externo do abdome Eretores da coluna Glúteo máximo FIGURA 2 Uma terceira forma de arte foi especificamente desenvolvida por Neumann e Kelly para esta edição (Figura 3). Com a ajuda do software, espécimes anatômicos preparados foram transformados em formatos tridimensionais texturizados. A profundidade e precisão anatômica dessas imagens proporcionam importantes esclarecimentos acerca da cinesiologia associada. Vista posterossuperior Metatars os Navic ne iforme Cu s ula r FI FL FI FL FM FM Articulação cuneonavicular FM Faceta Medial FI Faceta Intermédia FL Faceta Lateral Articulação cuboideonavicular Cuboide Tubérculo do 5º Metatarso (Processo Faceta para a estiloide) articulação calcaneocuboidea Complexo articular intercuneiforme e cuneocuboideo FIGURA 3 neumann000.indd xi 5/10/2011 11:46:38 AM neumann000.indd xii 5/10/2011 11:46:38 AM Colaboradores Peter R. Blanpied, PT, PhD Guy G. Simoneau, PT, PhD Professor, Physical Therapy Department, University of Rhode Island, Kingston, Rhode Island. http://www.uri.edu/ O Dr. Blandpied recebeu seu treinamento básico no Ithaca College, graduando-se como bacharel em fisioterapia em 1979. Após clinicar na reabilitação aguda de adultos e na área esportiva, retornou à escola e completou o mestrado em fisioterapia na University of North Carolina, em 1982, especializando-se em terapia musculoesquelética, e terminou o doutorado na University of Iowa, em 1989. Desde então, está na University of Rhode Island, como professor das áreas de biomecânica, pesquisa e terapêutica musculoesquelética. Além de continuar a clinicar, atua na pesquisa, financiada, e é autor de muitos artigos publicados e apresentações profissionais nacionais e internacionais. É editor associado do Journal of Orthopaedic & Sports Physical Therapy e ativo na Seção de Pesquisa da APTA. Mora em West Kingston, com a esposa Carol (que também é fisioterapeuta) e seus dois filhos. Professor, Department of Physical Therapy, Marquette University, Milwaukee, Wisconsin. http://www.marquette.edu/ O Dr. Simoneau recebeu o grau de bacharel em fisioterapia na Université de Montréal, Canadá, fez mestrado em educação física (medicina esportiva) na University of Illinois em UrbanaChampaign, Illinois, e doutorado em exercício e ciência esportiva (estudos da locomoção) na The Pennsylvania State University, State College, Pennsylvania, onde grande parte de seu trabalho foi focado no estudo da marcha, da corrida e da postura. O Dr. Simoneau é docente do Department of Physical Therapy da Marquette University desde de 1992. Suas principais áreas de docência são a ortopedia e a fisioterapia esportiva. Também publicou diversos capítulos em livros e artigos de pesquisa sobre tópicos relacionados à ortopedia/fisioterapia esportiva e à biomecânica. O Dr. Simoneau recebeu financiamento dos National Institutes of Health (NIH), do National Institute of Occupational Safety and Health, da Arthritis Foundation e da Foundation for Physical Therapy, entre outros. Seu trabalho de docência e pesquisa foi reconhecido por diversos prêmios nacionais da American Physical Therapy Association. Em 2007, Guy recebeu o título de doutor honorário da Lithuanian Academy of Physical Education, localizada em Kaunas, na Lituânia. Atualmente, o Dr. Simoneau é editor-chefe do Journal of Orthopaedic & Sports Physical Therapy. Em seu tempo livre, Guy gosta de viajar e praticar escalada. Sandra K. Hunter, PhD Associate Professor, Exercise Science Program, Marquette University, Milwaukee, Wisconsin. http://www.marquette.edu/ A Dra. Hunter é bacharel em educação física pela University of Sydney, graduada em ciência do movimento humano pela Wollongong University e doutora em exercício e ciência do esporte (fisiologia do exercício) pela University of Sydney, onde sua pesquisa focou a função neuromuscular relacionada ao envelhecimento e ao treinamento. A Dra. Hunter se mudou para Boulder, no Colorado, em 1999, assumindo o cargo de pesquisadora associada pós-doutora no Neurophysiology of Movement Laboratory, dirigido pelo Dr. Roger Enoka. Sua pesquisa era focada nos mecanismos de fadiga neuromuscular durante a realização de diversas tarefas. É membro do Exercise Science Program no Department of Physical Therapy da Marquette University desde 2003, onde sua área primária de docência é a fisiologia avançada do exercício e os métodos de pesquisa. O atual programa de pesquisa da Dra. Hunter pretende compreender os mecanismos de fadiga neuromuscular e os distúrbios da função muscular em populações clínicas submetidas a diferentes tarefas. Ela é autora de diversos capítulos de livros, muitos artigos de pesquisa e apresentações nacionais e internacionais. A Dra. Hunter recebeu financiamento dos National Institutes of Health (NIH), incluindo o National Institute of Aging e o National Institute of Occupational Safety and Health, assim como de outras agências. Faz parte da comissão editorial do Journal of Applied Physiology. Em seu tempo livre, Sandra gosta de viajar, acampar, escalar, andar de bicicleta e, às vezes, pratica triatlon. Mora em Wisconsin com o marido Jeff e a filha Kennedy. Colaboradores Originais David A. Brown, PT, PhD Associate Professor and Associate Chair for Post-Professional Education, Department of Physical Therapy & Human Movement Sciences, Feinberg School of Medicine, Northwestern University, Chicago, Illinois. http://www.feinberg.northwestern.edu/ O Dr. Brown é filho de um fisioterapeuta, Elliott. David terminou o mestrado na Duke University em 1983 e recebeu o título de doutor em ciência do exercício da University of Iowa, em 1989. Atualmente, é diretor do NUPTHMS Locomotor Control Laboratory. Sua área de especialidade clínica é a neurorreabilitação, com ênfase na locomoção após acidente vascular encefálico. Atuando como educador e cientista, o Dr. Brown é o inventor de quatro patentes, incluindo a do KineAssist Walking and Balance System, e é autor de muitos artigos publicados. Recebeu financiamento dos National Institutes of Health, Department of Education, Department of Veterans Affairs e Foundation for Physical Therapy. Dr. Brown é casado, tem um filho e gosta de escaladas, andar de bicicleta, viagens, música clássica, teatro e literatura americana. xiii neumann000.indd xiii 5/10/2011 11:46:38 AM xiv Colaboradores A. Joseph Threlkeld, PT, PhD Associate Professor, Department of Physical Therapy, Creighton University, Omaha, Nebraska. http://www.spahp2.creighton.edu/ Graduado em fisioterapia em 1976, pela University of Kentucky, Lexington, Kentucky, o Dr. Threlkeld atua no manejo clínico de disfunções musculoesqueléticas, principalmente a artrite e doenças relacionadas. Em 1984, completou seu doutorado em anatomia, com foco no remodelamento da cartilagem articular. Atualmente, é diretor do Rehabilitation Science Research Laboratory na Creighton University. O Dr. Threlkeld leciona cursos de cinesiologia e patomecânica e também dá aulas sobre eletrofisiologia e próteses a estudantes de fisioterapia. Sua pesquisa investiga o papel da carga dos membros inferiores na geração, controle e reabilitação dos padrões da marcha patológica. Entre seus hobbies, inclui-se a música, o remodelamento de sua casa e passeios a cavalo. neumann000.indd xiv Deborah A. Nawoczenski, PT, PhD Professor, Program in Physical Therapy, School of Health Sciences and Human Performance,Ithaca College, Rochester, New York. http://faculty.ithaca.edu/ A Dra. Deborah Nawoczenski é bacharel em fisioterapia e mestre em educação pela Temple University, na Filadélfia. É também doutora em ciência do exercício (biomecânica) pela University of Iowa, Iowa City. A Dra. Nawoczenski é codiretora do Movement Analysis Laboratory no Campus Rochester da Ithaca College. Sua pesquisa se concentra na biomecânica dos pés e calcanhar. Ela também é Professora Assistente Adjunta de Ortopedia na School of Medicine and Dentistry na University of Rochester, Rochester, Nova IYork. Faz parte do corpo editorial do Journal of Orthopaedic & Sports Physical Therapy e foi coeditora da edição dupla especial sobre pés e calcanhares. A Dra. Nawoczenski é coautora e coeditora de dois livros: Buchanan LE, Nawoczenski DA (eds):Spinal Cord Injury: Concepts and Management Approaches, e Nawoczenski DA, Epler ME (eds): Orthotics in Functional Rehabilitation of the Lower Limb. 5/10/2011 11:46:38 AM Consultores Francisco Alencar, PhD, DDS Marquette University College of Dentistry Milwaukee, Wisconsin Carlyn Alt, PT, PhD Physical Therapy Program University of Wisconsin-Milwaukee Milwaukee, Wisconsin Paul D. Andrew, PT, PhD Department of Physical Therapy School of Rehabilitation Sciences Hyogo University of Health Sciences Kobe, Japan James W. Bellew, EdD, PT Associate Professor Krannert School of Physical Therapy College of Health Sciences University of Indianapolis Indianapolis, Indiana Teri Bielefeld, PT, CHT Zablocki VA Medical Center Milwaukee, Wisconsin Paul-Neil Czujko, PT, DPT, OCS Stony Brook University Physical Therapy Program Stony Brook, New York Kevin Farrell, PT, OCS, FAAOMPT, PhD Physical Therapy Saint Ambrose University Davenport, Iowa McKenzie L. Fauth, DPT Marquette University Milwaukee, Wisconsin Michael Karegeannes, PT, LAT, MHSc Freedom Physical Therapy Services Fox Point, Wisconsin Jeremy Karman, PT Physical Therapy Department Aurora Sports Medicine Institute Milwaukee, Wisconsin Rolandas Kesminas, MS, PT Lithuanian Academy of Physical Education Applied Physiology and Physiotherapy Department Kaunas, Lithuania Ted King, PhD, OTR Occupational Therapy Program University of Wisconsin—Milwaukee Milwaukee, Wisconsin Jon D. Marion, OTR, CHT Marshfield Clinic Marshfield, Wisconsin Brenda L. Neumann, OTR, BCIAC Center for Neurophysiologic Learning Milwaukee, Wisconsin Jessica Niles, DPT Marquette University Milwaukee, Wisconsin Ann K. Porretto-Loehrke, DPT, CHT, COMT Hand & Upper Extremity of Northeast Wisconsin, Ltd. Appleton, Wisconsin Christopher J. Simenz, PhD, CSCS Department of Physical Therapy and Program in Exercise Science and Athletic Training Marquette University Milwaukee, Wisconsin Guy Simoneau, PT, PhD Department of Physical Therapy and Program in Exercise Science Marquette University Milwaukee, Wisconsin Andrew Starsky, PT, PhD Department of Physical Therapy and Program in Exercise Science Marquette University Milwaukee, Wisconsin Carolyn Wadsworth, PT, MS, OCS, CHT Advance, North Carolina David Williams, MPT, ATC, PhD Physical Therapy Program University of Iowa Iowa City, Iowa Clare Kennedy, DPT Chicago Rehabilitation Services Chicago, Illinois xv neumann000.indd xv 5/10/2011 11:46:38 AM neumann000.indd xvi 5/10/2011 11:46:39 AM Prefácio E stou feliz em apresentar a 2ª edição de Cinesiologia do Aparelho Musculoesquelético: Fundamentos para a Reabilitação. Esta obra é uma derivação natural da 1ª edição, expandindo muitos conceitos novos formados por um conhecimento em rápido crescimento. Mais de 2.000 referências são citadas nesta 2ª edição, apoiando a ciência por trás da cinesiologia e sua relevância clínica. Qualquer livro-texto respeitado deve continuar a crescer e acompanhar a base de conhecimento em expansão da disciplina e das profissões que ajuda a sustentar. A enorme popularidade das ilustrações criadas para a 1ª edição estimulou os esforços para melhorar, ainda mais, a arte apresentada na 2ª. Cada ilustração foi revisada e meticulosamente examinada; quase todos seus constituintes foram analisados. Através da colorização completa da arte existente, assim como pela criação ou modificação de muitas ilustrações, as figuras desta edição foram significativamente melhoradas. Como na 1ª edição, a arte direciona grande parte dos ensinamentos deste livro. Muitos novos elementos pedagógicos foram adicionados à 2ª edição, como as Questões para Estudo e uma seção denominada Conexões Clínicas Adicionais. Tais conexões permitem que os alunos apliquem a cinesiologia recém-aprendida a situações clínicas específicas e, frequentemente, complexas. Naturalmente, usei a 1ª edição do texto para ministrar minhas aulas de cinesiologia aos alunos da Marquette University. A íntima relação entre o texto, os alunos e eu gerou muitas ideias práticas sobre como melhorar a escrita, a organização ou fluxo dos tópicos e a clareza das imagens. Muitas melhorias, tanto no texto quanto nas ilustrações, são resultados do feedback direto que recebi de meus próprios alunos, assim como de outros estudantes e professores dos Estados Unidos e de outros países. Com a 2ª edição chegando às salas de aula de faculdades e universidades, fico ansioso em ouvir mais opiniões e sugestões sobre como melhorar este trabalho. Experiência A cinesiologia é o estudo do movimento humano, caracteristicamente no contexto do esporte, arte ou medicina. Em diversos graus, Cinesiologia do Aparelho Musculoesquelético: Fundamentos para a Reabilitação está relacionado a estas três áreas. Este livro é primariamente direcionado, porém, aos fundamentos cinesiológicos para a prática da reabilitação, que tenta otimizar os movimentos funcionais do corpo humano. Apesar de, em todo o mundo, a cinesiologia ser apresentada a partir de muitas perspectivas diferentes, eu e os autores-colaboradores focamos, principalmente, nas interações mecânicas e fisiológicas entre músculos e articulações do corpo. Essas interações são descritas para os movimentos normais e, em caso de doenças, traumas ou outras alterações dos tecidos musculoesqueléticos, para os movimentos anormais. Espero que este livro seja um valioso recurso educacional para diversas profissões ligadas à saúde e à medicina, tanto para estudantes quanto para clínicos. Abordagem Este livro enfatiza, principalmente, o detalhamento anatômico do aparelho musculoesquelético. Aplicando alguns princípios de física e fisiologia a uma boa base anatômica, o leitor deve ser capaz de mentalmente transformar uma imagem anatômica estática em um movimento dinâmico, tridimensional e relativamente previsível. As ilustrações criadas para Cinesiologia do Aparelho Musculoesquelético são projetadas para encorajar esta transformação mental. Esta abordagem à cinesiologia reduz a necessidade de memorização e favorece o raciocínio baseado na análise mecânica, podendo auxiliar estudantes e clínicos no desenvolvimento da avaliação, do diagnóstico e do tratamento relacionado à disfunção do aparelho musculoesquelético. Esta obra representa a síntese de quase 35 anos de experiência como fisioterapeuta, a qual inclui uma rica mistura de atividades clínicas, de pesquisa e docência relacionadas, de uma forma ou outra, à cinesiologia. Embora não soubesse disso à época, comecei a trabalhar neste livro no dia em que preparei minha primeira aula sobre cinesiologia, como professor recém-contratado da Marquette University, em 1986. Desde então, tive a sorte de conhecer alunos inteligentes e motivados. O desejo deles em aprender continuou a alimentar minha ambição e meu amor à docência. Como forma de encorajar meus alunos a ouvir ativamente, em vez de transcrever, passivamente, minhas aulas, desenvolvi um extenso conjunto de textos. Ano após ano, meus textos evoluíram, formando os rascunhos da 1ª edição deste livro. Agora, 8 anos depois, apresento sua 2ª edição. Organização A organização deste livro reflete um plano geral de estudo usado em meu curso de cinesiologia, dado em dois semestres, assim como outros cursos de nosso currículo. O livro contém 15 capítulos, divididos em quatro seções principais. A Seção I traz aos tópicos essenciais da cinesiologia, incluindo uma introdução à terminologia e os conceitos básicos, uma revisão da estrutura básica e da função do aparelho musculoesquelético e uma introdução aos aspectos biomecânicos e quantitativos da cinesiologia. As Seções II a IV apresentam detalhes anatômicos específicos e a cinesiologia das três principais regiões do corpo. A Seção II é focada, inteiramente, nos membros superiores, do ombro à mão. A Seção III trata da cinesiologia do esqueleto axial, que inclui a cabeça, o tronco e a coluna. Nesta seção, é incluído um capítulo especial, sobre a cinesiologia da mastigação e da ventilação. A Seção IV apresenta a cinesiologia dos membros inferiores, do quadril ao pé. O capítulo final desta seção, “Cinesiologia da Marcha”, integra funcionalmente e reforça a cinesiologia dos membros inferiores. Este texto é especificamente projetado com o propósito de ensinar. Devido a esta finalidade, os conceitos são apresentados em camadas, começando pela Seção I, que possui grande parte da fundamentação científica dos capítulos contidos nas Seções xvii neumann000.indd xvii 5/10/2011 11:46:39 AM xviii Prefácio II a IV. O material discutido nestes capítulos é também apresentado camada por camada, construídas com clareza e conhecimento profundo. Muitos dos capítulos são iniciados pela osteologia – o estudo da morfologia e da função subsequente dos ossos. A isto, se segue a artrologia – o estudo da anatomia e da função das articulações, incluindo os tecidos conjuntivos periarticulares associados. Neste estudo, é também incluída uma descrição detalhada da cinemática regional a partir de uma perspectiva artrocinemática e osteocinemática. O componente mais extenso da maioria dos capítulos das Seções II a IV realça as interações musculares e articulares. Este tópico é iniciado pela descrição dos músculos de uma região, incluindo um resumo das inervações das estruturas musculares e articulares. Após o estabelecimento do formato e da orientação física dos músculos, a interação mecânica entre esses e as articulações é discutida. Entre os tópicos apresentados, estão: as possíveis forças e movimentações dos músculos; as forças produzidas pelos músculos que são impostas às articulações; as sinergias intermusculares e interarticulares; os importantes papéis funcionais dos músculos na movimentação, na postura e na estabilidade; e as relações funcionais existentes entre os músculos e as articulações subjacentes. Durante cada capítulo, são dados diversos exemplos acerca de como a doença, o trauma ou a idade avançada podem reduzir a função ou provocar adaptações no aparelho musculoesquelético. Esta informação forma a fundação para o entendimento de muitas das avaliações e terapias usadas em diversas situações clínicas, no tratamento de indivíduos com doenças musculoesqueléticas e neuromusculares. Características Exclusivas Dentre as principais características da 2ª edição, estão: • • • • • • Ilustrações coloridas Quadros de Enfoque Especial Quadros de Visão Geral do Capítulo Quadros de Conexões Clínicas Adicionais Questões para Estudo Abordagem baseada em evidências Agradecimentos É ótimo ter a oportunidade de agradecer ao grande número de pessoas que tão gentilmente me auxiliaram durante a evolução deste livro-texto em sua 2ª edição. Tenho certeza que, inadvertidamente, esqueci algumas pessoas e, por isso, me desculpo. Devo começar meus agradecimentos pela minha família, principalmente minha esposa Brenda que, em seu estilo charmoso e abnegado, me apoiou, emocional e fisicamente, durante ambas as edições. Agradeço a meu filho, Donnie, e a minha enteada, Megann, por sua paciência e compreensão. Também agradeço a meus amorosos pais, Betty e Charlie Neumann, pelas oportunidades que me deram durante a vida. Muitas pessoas influenciaram, de maneira significativa, a realização de Cinesiologia do Aparelho Musculoesquelético: Fundamentos para a Reabilitação. Em primeiro ligar, gostaria de agradecer a Elisabeth Roen Kelly, a principal ilustradora médica deste livro, por seus anos de dedicação, talento incrível e elevado padrão de excelência. Também agradeço a Craig Kiefer e seus colegas pelo cuidado e habilidade na colorização das ilustrações. Estendo meus agradecimentos à equipe da Elsevier e seus afiliados, por neumann000.indd xviii sua paciência, em especial Melissa Kuster Deustch, Sarah Wunderly e Jeannie Robertson. Espero conseguir expressar minha sincera gratidão ao Dr. Lawrence Pan e ao Dr. Richard Jensen, diretores atual e anterior, respectivamente, do Department of Physical Therapy da Marquette University, assim como ao Dr. Jack Brooks e ao Dr. William Cullinan, reitores atual e anterior da College of Health Sciences da mesma universidade. Estes senhores me deram, abnegadamente, a oportunidade e a liberdade de realizar um sonho. Devo também às seguintes pessoas, que contribuíram com capítulos especiais a este livro: Peter R. Blanpied, Sandra K. Hunter, Guy G. Simoneau, David A. Brown, Deborah A. Nawoczenski e A. Joseph Threlkeld. Eles deram profundidade e amplitude essenciais a este texto. Sou grato também às muitas pessoas que revisaram os capítulos e o fizeram sem remuneração financeira. Essesconsultores foram mencionados nas seções anteriores. Diversas pessoas na Marquette University me deram valiosa assistência técnica e científica. Agradeço a Dan Johnson, fotógrafo-chefe, pela maioria das fotos contidas neste livro. Desejo também agradecer a Ljudmila (“Milly”) Mursec, a Martha Gilmore Jermé e às demais excelentes bibliotecárias da Raynor Library por sua importante ajuda com minha pesquisa. Muitas pessoas afiliadas direta ou indiretamente à Marquette University me auxiliaram, de diversas formas, durante a evolução desta edição. Esta ajuda incluiu a leitura de provas, a audição, a verificação de referências ou conceitos, o trabalho como modelo em fotografias, o fornecimento de fotografias, a obtenção de raios X e a assistência técnica ou em atividades de escritório. Por esta ajuda, sou grato a Santana Deacon, Caress Dean, Kerry Donahue, Rebecca Eagleeye, Kevin Eckert, Kim Fowler, Jessica Fuentes, Gregg Fuhrman, Mary Beth Geiser, Barbara Haines, Douglas Heckenkamp, Lisa Hribar, Erika Jacobson, Davin Kimura, Stephanie Lamon, John Levene, Lorna Loughran, Christopher Melkovitz, Melissa Merriman, Preston Michelson, Alicia Nowalk, Michael O’Brien, Ellen Perkins, Gregory Rajala, Janet Schuh, Robert Seeds, Elizabeth Shanahan, Bethany Shutko, Jeff Sischo, Pamela Swiderski, Michelle Treml, Stacy Weineke, Andy Weyer, Sidney White e David Williams. Sou muito feliz por ter este fórum para agradecer àqueles que impactaram minha vida profissional de modo significativo e positivo. De uma certa forma, o espírito destas pessoas está entrelaçado neste livro. Agradeço a Shep Barish por ter sido o primeiro a me incentivar a ensinar a cinesiologia; Martha Wroe, por ser um modelo para minha clínica fisioterápica; Claudette Finley, por me fornecer um profundo embasamento em anatomia humana; Patty Altland, por enfatizar, para Darrell Bennett e eu, a importância de não limitar o potencial funcional de nossos pacientes; Gary Soderberg, por sua orientação geral e firme dedicação ao princípio; Thomas Cook, por me mostrar que tudo isso pode ser divertido; Mary Pat Murray, pelos elevados padrões do ensino da cinesiologia na Marquette University, e Guy Simoneau, por constantemente me lembrar o que o trabalho árduo e ético pode conseguir. Desejo agradecer a diversas pessoas especiais que influenciaram este projeto. Dentre elas, incluem-se meus familiares, velhos e novos amigos, colegas de profissão e, em muitos casos, uma combinação disto tudo. Agradeço às seguintes pessoas por seu senso de humor ou aventura, sua lealdade, sua intensa dedicação a seus próprios objetivos e crenças e por sua tolerância e compreensão dos meus. Por isso, agradeço a meus quatro irmãos, Chip, Suzan, Nancy e Barbara, assim como a Brenda Neumann, Ted Hardee, David Eastwold, Darrell Bennett, Tony Hornung, Joseph Berman, Robert e Kim Morecraft, Guy Simoneau e a família Mehlos, principalmente a Harvey, por sempre perguntar 5/10/2011 11:46:39 AM Prefácio “Como vai o livro?”. Quero agradecer dois colegas especiais, Tony Hornung e Jeremy Karman, fisioterapeutas que, por muitos anos, me auxiliaram no ensino da cinesiologia na Marquette University. Eles ajudaram a manter as aulas vibrantes, divertidas e clinicamente relevantes. xix Por fim, gostaria de agradecer a todos os meus alunos, passados e presentes, por fazer meu trabalho tão recompensador. Embora eu muitas vezes pareça muito preocupado para conseguir demonstrar isso, vocês fazem tudo valer a pena. DAN neumann000.indd xix 5/10/2011 11:46:39 AM neumann000.indd xx 5/10/2011 11:46:39 AM Sumário Seção Capítulo I Tópicos Essenciais em Cinesiologia, 1 1 Começando, 3 Donald A. Neumann, PT, PhD, FAPTA 2 Capítulo Estrutura Básica e Função das Articulações Humanas, 28 Donald A. Neumann PT, PhD, FAPTA • A. Joseph Threlkeld, PT, PhD Capítulo 3 Músculo: o Estabilizador Primário e Motor do Sistema Esquelético, 47 Sandra K. Hunter, PhD • David A. Brown, PT, PhD 4 Capítulo Princípios Biomecânicos, 77 Peter R. Blanpied, PT, PhD • Deborah A. Nawoczenski, PT, PhD Apêndice I II Seção Capítulo 5 Revisão de Trigonometria e Problemas Adicionais da Biomecânica, 115 Extremidade Superior, 119 Complexo do Ombro, 121 Donald A. Neumann, PT, PhD, FAPTA Capítulo 6 Cotovelo e Antebraço, 173 Donald A. Neumann, PT, PhD, FAPTA Capítulo 7 Punho, 216 Donald A. Neumann, PT, PhD, FAPTA Capítulo 8 Mão, 244 Donald A. Neumann, PT, PhD, FAPTA II Apêndice Seção III Capítulo 9 Materiais de Referência sobre Inserções Musculares e Inervação da Extremidade Superior, 298 Esqueleto Axial, 305 Esqueleto Axial: Osteologia e Artrologia, 307 Donald A. Neumann, PT, PhD, FAPTA Capítulo 10 Esqueleto Axial: Interações Musculares e Articulares, 379 Donald A. Neumann, PT, PhD, FAPTA Capítulo 11 Cinesiologia da Mastigação e da Ventilação, 423 Donald A. Neumann, PT, PhD, FAPTA Apêndice III Materiais de Referência sobre Inserções Musculares e Inervação do Esqueleto Axial, 456 xxi neumann000.indd xxi 5/10/2011 11:46:39 AM xxii Sumário Seção IV Capítulo 12 Extremidade Inferior, 463 Quadril, 465 Donald A. Neumann, PT, PhD, FAPTA Capítulo 13 Joelho, 520 Donald A. Neumann, PT, PhD, FAPTA Capítulo 14 Tornozelo e Pé, 573 Donald A. Neumann, PT, PhD, FAPTA Capítulo 15 Cinesiologia da Marcha, 627 Guy G. Simoneau, PhD, PT Apêndice IV Materiais de Referência sobre Inserções Musculares e Inervação da Extremidade Inferior, 682 Respostas das Questões para Estudo, 689 Índice, 707 neumann000.indd xxii 5/10/2011 11:46:39 AM Capít u lo 15 Cinesiologia da Marcha GUY G. SIMONEAU, PhD, PT VISÃO GERAL DO CAPÍTULO PERSPECTIVA HISTÓRICA DA ANÁLISE DE MARCHA, 628 DESCRITORES ESPACIAL E TEMPORAL, 630 Ciclo da Marcha, 630 Fases de Apoio e de Balanço, 633 Subdivisão das Fases de Apoio e de Balanço, 635 DESLOCAMENTO E CONTROLE DO CENTRO DE MASSA CORPORAL, 636 Deslocamento do Centro de Massa, 636 Considerações sobre Energia Cinética e Potencial, 638 CINEMÁTICA ARTICULAR, 639 Cinemática no Plano Sagital, 639 Pelve, 639 Quadril, 639 Joelho, 640 Tornozelo (Articulação Talocrural), 640 Primeira Articulação Tarsometatársica, 641 Primeira Articulação Metatarsofalangea na, 641 Cinemática no Plano Frontal, 642 Pelve, 642 Quadril, 642 Joelho, 643 Tornozelo (Articulação Talocrural), 644 Pé e Articulação Subtalar, 644 C Cinemática no Plano Horizontal, 645 Pelve, 645 Fêmur, 645 Tíbia, 645 Quadril, 645 Joelho, 646 Tornozelo e Pé, 646 Cinemática do Tronco e dos Membros Superiores, 646 Tronco, 646 Ombro, 646 Cotovelo, 646 GASTO ENERGÉTICO, 647 Estratégias de Economia de Energia da Marcha, 648 Deslocamento Vertical do Centro de Massa, 648 Deslocamento Lateral do Centro de Massa, 649 ATIVIDADE MUSCULAR, 650 Tronco, 650 Eretores da Espinha, 650 Reto do Abdome, 650 Quadril, 650 Extensores do Quadril, 650 Flexores do Quadril, 651 Abdutores do Quadril, 652 Adutores e Rotadores do Quadril, 652 aminhar (deambulação) serve como necessidade básica de um indivíduo para se deslocar de um lugar para outro e, portanto, é uma das atividades mais comuns que as pessoas realizam diariamente. Teoricamente, a marcha é realizada tanto de forma eficiente, para minimizar a fadiga, como com segurança, para evitar quedas e lesões associadas.188 Uma pessoa saudável com anos de prática apresenta um controle necessário para deambular enquanto conversa, olha em direções diferentes e, até mesmo, supera obstáculos e outras forças desestabilizadoras com esforço mínimo. Joelho, 653 Extensores do Joelho, 653 Flexores do Joelho, 653 Tornozelo e Pé, 653 Tibial Anterior, 653 Extensor dos Dedos e Extensor Longo do Hálux, 653 Flexores Plantares do Tornozelo, 653 Tibial Posterior, 654 Músculos Fibulares, 655 Músculos Intrínsecos do Pé, 655 CINÉTICA, 655 Forças de Reação do Solo, 655 Forças Verticais, 655 Forças Anteroposteriores, 656 Forças Mediolaterais, 657 Trajetória do Centro de Pressão, 657 Potência e Torque Articulares, 657 Quadril, 658 Joelho, 659 Tornozelo, 662 Forças nas Articulações e nos Tendões, 663 DISFUNÇÕES DA MARCHA, 663 RESUMO, 671 CONEXÕES CLÍNICAS ADICIONAIS, 672 REFERÊNCIAS, 677 QUESTÕES PARA ESTUDO, 681 Embora para uma pessoa saudável caminhar pareça fácil, o desafio da deambulação pode ser reconhecido ao se observar os indivíduos nos dois extremos de vida (Fig. 15-1). No início da vida, a criança precisa de 11 a 15 meses para aprender a ficar de pé e caminhar.67,180 Uma vez de pé, as crianças vão refinar a sua marcha para que visualmente se assemelhem ao padrão de caminhar de um adulto maduro, aos quatro a cinco anos de idade,26,172,178,179,180 com aperfeiçoamento futuro ocorrendo possivelmente por vários anos.* Na fase final da vida, caminhar se torna com frequência, um desafio cada vez maior. Em virtude da diminuição da força, do equilíbrio *Referências 26, 27, 48, 66, 75, 77, 80. 627 neumann015.indd 627 26/5/2011 09:26:34 628 Seção IV Extremidade Inferior Criança caminhando Adulto caminhando Idoso caminhando FIGURA 15-1. A locomoção nos vários estágios da vida. ou de doença, os idosos podem necessitar de uma bengala ou andador para deambular de forma segura. Patla144 expressou eloquentemente a importância da deambulação em nossas vidas: “Nada simboliza um nível de independência e nossa percepção de uma boa qualidade de vida, mais do que a capacidade de andar de forma independente, com o nosso próprio poder, de um lugar para outro. Celebramos o desenvolvimento desta habilidade nas crianças e tentamos nutrir e sustentar por toda a vida.” Este capítulo fornece uma descrição das características cinesiológicas fundamentais da marcha. Salvo indicação contrária, as informações fornecidas referem-se a indivíduos com um padrão de marcha normal e maduro, que caminha em superfície plana, a uma velocidade média constante. Embora este capítulo forneça detalhes suficientes para ser lido de forma independente do resto deste livro, os Capítulos 12 a 14 facilitarão um entendimento ainda maior da marcha. Principais Tópicos • • • • • • • Descritores espacial e temporal Controle do centro de massa corporal Cinemática articular Gasto energético Atividade muscular Cinética da marcha Disfunções da marcha A observação da marcha, que é o foco deste capítulo, fornece informações sobre o resultado de um conjunto complexo “nos bastidores” de interações entre as funções sensoriais e motoras. Para uma pessoa caminhar, o sistema nervoso central deve gerar ações motoras adequadas a partir da integração de entradas visuais, proprioceptivas e sensoriais vestibulares. Embora este capítulo aborde a complexidade da parte muscular e ações realizadas neumann015.indd 628 durante a marcha, não abrange o conceito de controle motor. Para adquirir uma maior compreensão sobre a complexidade do controle motor da marcha, o leitor é aconselhado a pesquisar outras fontes sobre o assunto.* PERSPECTIVA HISTÓRICA DA ANÁLISE DE MARCHA “Se um homem andar no chão, ao lado de uma parede com uma pena mergulhada em tinta presa à sua cabeça, a linha traçada pela pena não seria reta, mas em zig-zag, porque ela desce quando ele se inclina e se eleva quando ele fica ereto e se levanta.”6 Este registro inicial escrito por Aristóteles (384-322 a.C.) da observação da locomoção e numerosas pinturas e esculturas antigas de pessoas envolvidas no processo de caminhar, são o testamento da observação casual e detalhada da deambulação, que foi motivo de interesse ao longo da história. Apesar deste interesse antigo, somente em 1836 os irmãos Weber 200 publicaram o primeiro trabalho científico notável sobre a marcha, beneficiados pelos avanços científicos fornecidos por pessoas como Galileu Galilei (1564-1642), Giovanni Borelli (16081679) e Isaac Newton (1642-1727), só para citar alguns. Wilhelm – físico e eletricista e Eduard – anatomista e fisiologista que utilizou instrumentos como um cronômetro, uma fita métrica e um telescópio –, descreveram e mediram os elementos da marcha, como o comprimento do passo, a cadência, a liberação do pé do solo e a excursão vertical do corpo. Eles também definiram os elementos básicos do ciclo da marcha, como a fase de balanço, a fase de apoio e o período de duplo apoio do membro. Muitos termos que introduziram permanecem em uso até hoje. Os Webers consideraram a hipótese de que o princípio básico da marcha é o do menor esforço muscular, um conceito conhecido como verdadeiro *Referências 85, 107, 139, 142, 165, 212. 26/5/2011 09:26:34 Capítulo 15 b c a Cinesiologia da Marcha 629 cargas intersegmentares (p. ex., torques articular e forças). Suas análises dos torques articulares, limitadas à fase de balanço da marcha, refutam o conceito anterior, sugerido por Weber e Weber em 1836, de que o movimento dos membros inferiores durante a fase de balanço da marcha pode ser explicado exclusivamente pela teoria do pêndulo passivo.201 Ao longo do século XX, a compreensão da locomoção foi bastante reforçada por muitos avanços científicos. A instrumentação para documentar a cinemática evoluiu a partir de câmeras de vídeo simples, com filme que exigia análise minuciosa com uma régua e transferidor, a sistemas altamente sofisticados de infravermelho, com o tempo real de dados coordenados dos segmentos do membro. Os pesquisadores notáveis que contribuíram para a descrição da cinemática da marcha com a utilização de uma variedade de técnicas de imagem incluem Eberhart,49 Murray,125,127 Inman,83 Winter204 e Perry.147 Notável é o trabalho de Murray, fisioterapeuta e pesquisador, que publicou vários artigos nos anos 1960, 1970 e 1980 descrevendo a cinemática de muitos aspectos da marcha normal e anormal (Fig. 15-3).126-128,130,131,176 Entre outras realizações, os dados de sua pesquisa sobre a cinemática da marcha em indivíduos com deficiência influenciou o projeto das articulações artificiais e próteses de membros inferiores. FIGURA 15-2. Os calçados instrumentados de Marey utilizados para a medição da marcha. (De Marey EJ: La machine animal, Paris, 1873, Librairie Germer Baillière.) até hoje, embora os métodos exatos pelos quais o corpo minimiza o gasto de energia ainda sejam estudados.137, 209, 210 Uma extensa quantidade de trabalhos dos irmãos Weber foram publicados em 1894 e traduzidos em 1992.198, 199 No século XIX, outros pesquisadores, como Marey, Carlet e Vierordt, utilizaram tecnologia engenhosa para ampliar o nosso conhecimento da marcha. Entre os métodos novos de medição mais citados de Marey e Carlet estão os calçados com câmaras de ar acoplados a um gravador para indicar a fase de balanço e a fase de apoio da marcha (Fig. 15-2).112,113,114 Outra ideia inteligente de Vierordt foi a utilização de tinta em bicos de pulverização acoplados aos calçados e aos membros.189 A tinta pulverizada no piso e na parede à medida que o indivíduo caminha, fornece um registro permanente do movimento. Paralelamente, os avanços no campo da cinematografia criaram um meio eficaz para estudar e registrar os padrões cinemáticos da locomoção dos seres humanos e dos animais. Muybridge pode ser a pessoa mais reconhecida do seu tempo a usar a cinematografia para documentar a sequência de movimentos. Ele também foi o mais famoso na resolução de uma antiga controvérsia a respeito de um cavalo trotando. Em 1872, usando uma sequência de fotografias, demonstrou que as quatro patas de um cavalo trotando estão, na verdade, simultaneamente fora da terra por períodos muito curtos de tempo. Muybridge criou uma impressionante coleção de fotografias sobre a marcha humana e animal, que foi publicada inicialmente em 1887, e montada e reproduzida em 1979.133,134 Inicialmente, a descrição da marcha foi limitada à análise planar, o movimento foi registrado normalmente no plano sagital e menos frequentemente no plano frontal. Braune e Fisher15,16 são creditados como os primeiros, de 1895 a 1904, a realizar uma análise global tridimensional de uma pessoa andando. Por meio de quatro câmeras (dois pares de câmeras de recodificação de movimento para cada lado do corpo) e vários tubos de luz ligados a vários segmentos do corpo, documentaram a cinemática da articulação em três dimensões. Eles também foram os primeiros a usar os princípios da mecânica para medir quantidades dinâmicas, como aceleração segmentar, propriedades inerciais segmentares e neumann015.indd 629 A B FIGURA 15-3. Um exemplo da tecnologia utilizada por Murray para registrar a cinemática básica da marcha. Um homem mais velho (A) e um menino (B) usam marcadores reflexivos enquanto caminhavam em um corredor escuro. A câmera foi usada com o obturador aberto e a luz reluziu 20 vezes por segundo para controlar a localização dos marcadores. Um flash de luz brilhante adicional foi usado para fotografar o homem ou o menino, enquanto caminhavam. Esta técnica permitiu a visualização precoce de um ciclo de marcha completo com uma única fotografia. Um espelho montado no teto também foi empregado para observar o movimento no plano horizontal. (A, Murray MP, Gore DR: Gait of patients with hip pain or loss of hip joint motion. In Black J, Dumbleton JH, eds: Clinical biomechanics: a case history approach, New York, 1981, Churchill Livingstone. B, Stratham L, Murray MP: Early walking patterns of normal children, Clin Orthop Relat Res 79:8, 1971). 26/5/2011 09:26:34 630 Seção IV Extremidade Inferior Laboratório de análise da marcha Transmissor EMG Câmera 6 Câmera 1 Câmera 5 Câmera 2 Plataforma de força Receptor EMG Câmera 3 Câmera 4 Computador (Aquisição e sincronização de todos os sinais) FIGURA 15-4. Instrumentos utilizados em um laboratório de marcha típico para estudar a locomoção. Da mesma forma, uma compreensão mais ampla da cinética da marcha foi possível através do desenvolvimento de dispositivos para medir as forças que ocorrem na interface pé-solo. Amar,2 Elftman,52 Bresler e Frankel17 e Cunningham e Brown38 realizaram contribuições significativas neste campo. Com a capacidade de medir forças entre o pé e o solo, surgiram métodos computacionais para calcular as forças e os torques que ocorrem nas articulações dos membros inferiores durante a fase de apoio da deambulação.145,166,206 O desenvolvimento da superfície e de eletrodos intramusculares promoveu a oportunidade para registrar a atividade elétrica dos músculos durante a marcha.62,181 Quando essa informação é integrada à cinemática da locomoção, o papel que cada músculo executa durante a marcha pode ser mais bem apreciado e mais objetivamente descrito. Muitos pesquisadores, incluindo Sutherland,179 Perry,147 Inman83 e Winter204 realizaram contribuições notáveis para o estudo da eletromiografia (EMG) durante a locomoção. Atualmente, a análise da marcha é realizada rotineiramente em laboratórios especializados de biomecânica (Fig. 15-4). Os dados tridimensionais cinemáticos são obtidos por meio de duas ou mais FIGURA 15-5. Abordagem típica utilizada para a análise do movimento humano. As variáveis nos círculos coloridos podem ser mensuradas com precisão. Os métodos computacionais nos retângulos são utilizados para calcular as variáveis nos círculos verdes. câmeras de alta velocidade sincronizadas. As forças de reação do solo são medidas com a utilização de plataformas de força embutidas no piso. Os padrões de atividade muscular são registrados por vários canais, muitas vezes, telemetria e sistemas eletromiográficos. Finalmente, as forças conjuntas dos membros inferiores, os torques e a potência são calculados com a combinação de dados cinemáticos, forças de reação do solo e características antropométricas do indivíduo (Fig. 15-5). Esses dados são então usados para descrever e estudar as marchas normal e anormal. Os pacientes com uma variedade de patologias podem se beneficiar a partir das análises instrumentadas de marcha. Atualmente, os principais beneficiários desta tecnologia, no entanto, são crianças com paralisia cerebral. Nesta população, a análise da marcha instrumentada é frequentemente utilizada antes da cirurgia a fim de auxiliar na determinação de uma intervenção adequada. Ela é utilizada novamente após a cirurgia para a avaliação objetiva do resultado.64 Uma descrição mais detalhada da história, das ferramentas e dos métodos utilizados para a análise da marcha pode ser encontrada em outras fontes.7,93,181-183,188,202 A tecnologia sofisticada, tal como descrita anteriormente, fornece informações detalhadas que podem melhorar a capacidade de descrever e compreender a locomoção. Uma vez que essa tecnologia é raramente disponível no ambiente clínico típico, os médicos devem rotineiramente confiar na observação visual direta para avaliar as características da marcha de seus pacientes.140 Tal análise observacional requer conhecimento e compreensão da marcha normal. A aprendizagem sobre locomoção, como apresentada aqui, é uma experiência mais dinâmica e recompensadora se o estudo deste capítulo for combinado com as observações dos padrões de marcha de parentes, amigos, vizinhos e doentes no ambiente clínico. DESCRITORES ESPACIAL E TEMPORAL Esta seção descreve as medidas de distância e de tempo relacionadas à marcha. Ciclo da Marcha Caminhar é o resultado de uma série de movimentos cíclicos. Como tal, pode ser convenientemente caracterizada por uma descrição detalhada de sua unidade mais fundamental: um ciclo de marcha (Fig.15-6). O ciclo da marcha é iniciado a partir do contato do pé no chão. Como o contato do pé é feito normalmente com o calcanhar, o ponto de 0%, ou início do ciclo da marcha, é, muitas vezes, referido como contato do calcanhar ou batida do calcanhar. O ponto de 100%, ou conclusão do ciclo da marcha, ocorre tão logo o mesmo pé mais uma vez entra em contato com o solo. O contato inicial é muitas vezes usado como um termo substituto para o contato do calcanhar, quando um indivíduo faz o primeiro contato com o solo com uma parte diferente do pé; Eletromiografia Antropometria Cinemática Dinâmica inversa Forças articulares, torques e potências Modelagem Forças musculares individuais As forças de reação do solo neumann015.indd 630 26/5/2011 09:26:34 Capítulo 15 Cinesiologia da Marcha 631 O ciclo da marcha 0% 50% 100% Contato do calcanhar direito Contato do calcanhar esquerdo Contato do calcanhar direito Passada (ciclo da marcha) Passo esquerdo Passo direito FIGURA 15-6. O ciclo da marcha do contato do calcanhar direito ao contato subsequente do calcanhar direito. mas como a proposta deste capítulo concentra-se na marcha normal, o termo contato do calcanhar será utilizado. Uma passada (sinônimo de um ciclo de marcha) é a sequência de eventos que se realizam entre contatos sucessivos do calcanhar do mesmo pé. Em comparação, o passo é a sequência de eventos que ocorre nos contatos sucessivos do calcanhar do pé oposto, por exemplo, entre os contatos do calcanhar direito e esquerdo. Um ciclo de marcha, portanto, tem dois passos: um passo à esquerda e outro à direita. O descritor espacial mais básico da marcha inclui o comprimento de uma passada e o comprimento de um passo (Fig. 15-7). O comprimento da passada é a distância entre dois contatos consecutivos do calcanhar do mesmo pé. O comprimento do passo, por outro lado, é a distância entre sucessivos contatos do calcanhar dos dois pés. A comparação do comprimento do passo da direita com o do passo da esquerda pode contribuir para avaliar a simetria da marcha entre os membros inferiores (Fig. 15-8). A largura do passo é a distância lateral entre os centros do calcanhar de dois contatos consecutivos do pé e é, em média, cerca de 8 a 10 cm (Fig. 15-7).73,111,117,118 O ângulo do pé, o total do “dedo do pé para fora”, é o ângulo entre a linha de progressão do corpo e ao eixo longitudinal do pé. Cerca de 5 a 7 graus é considerado a média desse ângulo.118 Embora as normas referidas sejam para adultos, uma notável publicação80 com dados coletados de 360 crianças de 7 a 12 anos de idade documentou uma largura normal do passo e do ângulo do pé, de 8 a 10 cm e 2,5 a 6 graus, respectivamente – valores relativamente semelhantes aos de adultos jovens e saudáveis. Descritores Espaciais da Marcha • • Comprimento da passada Comprimento do passo • • Largura do passo Ângulo do pé O descritor temporal mais básico da marcha é a cadência, o número de passos por minuto, que também é chamado de ritmo do passo. Outros descritores temporais da marcha são o tempo da passada (o tempo para um ciclo completo da marcha) e tempo do passo (o tempo para a realização de um passo direito ou um passo esquerdo). Observe que com a marcha simétrica o tempo do passo pode ser derivado da cadência (ou seja, o tempo do passo é o inverso da cadência). Descritores Temporais da Marcha • • • Cadência Tempo da passada Tempo do passo Descritor Espacial-Temporal • Velocidade da marcha Descritores espaciais da marcha Contato do calcanhar direito Comprimento da passada = 144 cm Contato do calcanhar esquerdo Contato do calcanhar direito Comprimento do passo direito = 72 cm Comprimento do passo esquerdo = 72 cm Largura do passo = 8-10 cm Ângulo do pé = 5°-7° FIGURA 15-7. Descritores espaciais da marcha e os seus valores de um ciclo de marcha direito. neumann015.indd 631 26/5/2011 09:26:35 632 Seção IV Extremidade Inferior FIGURA 15-8. A influência da deficiência e da patologia sobre o comprimento do passo. A ilustra o comprimento do passo simétrico esperado em um indivíduo saudável. B e C são exemplos de assimetria do comprimento do passo frequentemente observados em pessoas com uma deficiência ou patologia que afeta o apoio simples do membro inferior. Observe a redução bilateral do comprimento do passo normal em ambos os casos, mostrando a interdependência dos membros inferiores durante a marcha. D mostra uma redução relativamente simétrica bilateral no comprimento do passo secundário à doença de Parkinson, uma patologia que acomete ambos os membros inferiores. (Modificado com permissão de Murray MP: Gait as a total pattern of movement, Am J Phys Med 46:290, 1967.) Membro direito 78 cm 78 cm Membro Membro Membro esquerdo esquerdo direito A NORMAL 33 cm Membro Membro sadio parético C A velocidade da marcha combina medição tanto espacial como temporal ao fornecer informações sobre a distância percorrida em um determinado período de tempo. As unidades de medida são tipicamente metros por segundo (m/s) ou milhas por hora (mph). A velocidade pode ser calculada ao se medir o tempo que é preciso para cobrir uma determinada distância, ou a distância percorrida em um determinado período de tempo, ou multiplicando a cadência pelo comprimento do passo. A velocidade de marcha varia consideravelmente entre os indivíduos, com base em fatores como idade e características físicas (por exemplo, altura e peso).36,93 De todas as medidas espaciais e temporais da marcha, a velocidade pode ser a melhor e mais funcional medida da capacidade de andar de um indivíduo. Para adultos saudáveis, um ciclo da marcha (i. e., dois passos consecutivos) leva pouco mais de um segundo e abrange cerca de 1,44 m (4,5 pés), o que resulta em uma velocidade de marcha de 1,37 m/s. Os dados da Tabela 15-1 indicam que, em uma velocidade de marcha escolhida livremente, as mulheres apresentam uma velocidade mais lenta, menor comprimento de passo e cadência mais rápida do que os homens. Essas diferenças são provavelmente, em parte, reflexo das disparidades antropométricas entre os sexos. Porém, mesmo quando antropometricamente correspondente com os homens, as mulheres continuam a demonstrar uma 27 cm Membro Membro parético sadio HEMIPARESIA 41 cm 31 cm Membro Membro Membro Membro sadio deficiente deficiente sadio B QUADRIL DOLOROSO 26 cm 24 cm Membro Membro Membro Membro direito esquerdo esquerdo direito D DOENÇA DE PARKINSON maior cadência e comprimento mais curto do passo que os homens, quando andam na mesma velocidade.56,129 Valores Normais para a Marcha com Base em Dados da Tabela 15-1 • • • Velocidade de marcha: 1,37 m/s (3 mph) Cadência: 1,87 passos/s (110 passos/min) Comprimento do passo: 72 cm (28 polegadas) Os dados clássicos na Tabela 15-1 foram derivados de mais de 2.300 pedestres caminhando ao ar livre em uma grande cidade e que não sabiam que suas características de marcha eram medidas. A Tabela 15-2 fornece os dados de um número restrito de estudos,* incluindo um número menor de indivíduos que andaram dentro de uma pista instrumentada utilizada de forma precisa e confiável, medindo as características espaciais e temporais da marcha. Ao contrário dos pedestres dos estudos na Tabela 15-1, esses indiví*Referências 13, 73, 79, 111, 118, 208. TABELA 15-1. Dados Normativos para Velocidade da Marcha, Ritmo de Passo e Comprimento de Passo Drillis (1961)47 (Cidade de Nova Iorque) Molen (1973)122 (Amsterdam) Finley and Cody (1970)55 (Filadélfia) Média sobre Gênero e Cidade Velocidade da marcha (m/s) 1,46* 1,9* Comprimento de passo (m) 0,76* 1,37 (homens) 1,24 (mulheres) 1,84 (homens) 1,94 (mulheres) 0,74 (homens) 0,63 (mulheres) 1,37 Ritmo de passo (passos/s) 1,39 (homens) 1,27 (mulheres) 1,79 (homens) 1,88 (mulheres) 0,77 (homens) 0,67 (mulheres) 1,87 0,72 Dados obtidos a partir de mais de 2.300 pedestres que não tinham conhecimento da observação enquanto caminhavam. *O cálculo da média de homens e mulheres é realizado em conjunto para esses dados. neumann015.indd 632 26/5/2011 09:26:35 Capítulo 15 633 Cinesiologia da Marcha TABELA 15-2. Dados Selecionados para Parâmetros de Marcha Temporal e Espacial Derivados de Indivíduos que Caminham em Ambiente Laboratorial sobre uma Pista Instrumentada* Velocidade da Marcha (m/s) Cadência† (Passos/min) Comprimento da Passada‡(m) Largura do Passo (cm) Marchetti et al (2008)111 1,43 (1,35-1,51) 119,1 (115,1-123,1) 70,7 (67,8-74,2) 72,6 (69,1-76,1) 8,1 (7,0-9,2) Hollman et al (2007)79 Youdas et al (2006)208 Menz et al (2004)118 Bilney et al (2003)13 Grabiner et al (2001)73§ 1,48 1,40 1,43 1,46 119,6 ± 7,6 110,8 ± 6,9 114,7 ± 6,4 1,42 ± 0,13 0,77 ± 0,06 1,53 ± 0,14 ± ± ± ± 0,15 0,13 0,14 0,16 8,6 ± 3,2 Ângulo do Pé (Graus) 6,7 ± 5,0 10,8 ± 2,7 8,7 ± 2,3 *Os dados são médias ± desvios-padrão, com exceção de Marchetti et al, para quem os dados são médias e intervalos de confiança de 95%. Todos os dados foram para adultos saudáveis, e todos os grupos incluíam homens e mulheres. † Divide a cadência por 60 para obtenção do ritmo do passo em passos por segundo. ‡ Os dados por Marchetti et al. são para o comprimento do passo esquerdo e direito, e os dados por Menz et al. são para o comprimento do passo. § Dados para dois grupos diferentes de indivíduos. duos estavam cientes de que suas características de marcha eram medidas, o que pode explicar, em parte, as pequenas diferenças observadas entre os dados nas duas tabelas. Os dados nas Tabelas 15-1 e 15-2 foram coletados de indivíduos que caminhavam em uma velocidade de livre escolha, que nem sempre pode ser suficientemente rápida para um destino em relação à quantidade desejada de tempo. Quando um aumento da velocidade de marcha é necessário, duas estratégias são disponíveis: aumento da passada, ou comprimento do passo, e aumento da cadência (Fig. 15-9). Normalmente, um indivíduo combina ambas as estratégias, até que um razoável comprimento maior de passo seja alcançado. A partir desse ponto, um novo aumento da velocidade de marcha é unicamente relacionado a um aumento da cadência. Deve ser reenfatizado, portanto, que todos os valores (espacial, temporal, cinemática e variáveis cinéticas) obtidos a partir das medidas da marcha variam de acordo com a velocidade. Para referência e interpretação adequadas, os relatórios das características da marcha devem sempre incluir a velocidade de marcha da qual os dados foram coletados. Fases de Apoio e de Balanço Para ajudar a descrever os eventos que ocorrem durante o ciclo da marcha, é habitual subdividi-lo a partir de zero a 100%. Como afirmado anteriormente, o calcanhar ou o pé em contato com o solo é considerado o início do ciclo de marcha (0%) e, em seguida, o próximo contato com o solo feito pelo mesmo pé é considerado o fim do ciclo (100%). Ao longo deste capítulo, a marcha é descrita utilizando a extremidade inferior direita como referência. Um ciclo completo para a extremidade inferior direita pode ser dividido em duas fases principais: apoio e balanço (Fig. 15-10). A fase de apoio (do contato do calcanhar direito até o desprendimento dos dedos do pé direito) ocorre quando este pé está no chão, apoiando o peso do corpo. A fase de balanço (desprendimento dos dedos do pé direito até o próximo contato do calcanhar direito) ocorre quando o pé direito está no ar, avançado para frente para o próximo contato com o solo. Na velocidade normal de marcha, a fase de apoio ocupa aproximadamente 60% do ciclo e a fase de balanço ocupa os 40% restantes. VELOCIDADE DA MARCHA LIVREMENTE ESCOLHIDA 64 homens normais Apoio Balanço 62% 38% 50% Membro esquerdo Membro direito Velocidade da marcha livremente escolhida CCE Velocidade rápida 0 38% 62% 50% CCE CCD 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,2 1,4 VELOCIDADE DA MARCHA RÁPIDA 64 homens normais Membro esquerdo 58% 42% 50% Membro direito CCE A B 0 Apoio Balanço 42% 58% 50% CCD 0,2 0,4 CCE 0,6 0,8 1,0 Duração do ciclo da marcha em segundos FIGURA 15-9. Métodos para aumentar a velocidade da marcha. A ilustra o maior comprimento de passo utilizado para aumentar a velocidade da marcha. B ilustra a menor duração do ciclo da marcha (cadência de andar mais rápido) utilizado para aumentar a velocidade da marcha. Também ilustra que na velocidade da marcha mais rápida, uma pequena porcentagem do ciclo da marcha é gasto no apoio duplo do membro (16% na velocidade da marcha rápida em comparação a 24% na velocidade livre). (Dados de Murray MP, Kory RC, Clarkson BH, Sepic SB: Comparison of free and fast speed walking patterns of normal men, Am J Phys Med 45:8, 1966.) neumann015.indd 633 26/5/2011 09:26:35 634 Seção IV Extremidade Inferior E N F O Q U E E S P EC IAL 15-1 Medidas Clínicas Simples da Marcha instrumentação sofisticada, tais como pistas de marcha e foot A switches, existe para fazer medições espaciais e temporais da colocação do pé durante a marcha.* Entretanto, para a maioria das aplicações clínicas, essa informação pode ser medida com as ferramentas de rápido acesso e pouca imaginação. A velocidade média de marcha pode ser medida através de um cronômetro e de uma distância conhecida. O comprimento e a largura do passo podem ser medidos pelo uso de marcas de tinta feitas por calçados ou pés sobre um rolo de papel que cobre o chão. Esta técnica funciona bem, especialmente para documentar padrões de marcha anormais, incluindo a assimetria no comprimento do passo. Clinicamente, as medidas simples da velocidade de marcha e da distância podem ser úteis no acompanhamento da evolução funcional ou para documentar as limitações funcionais. Os resultados obtidos a partir de um paciente podem ser comparados aos valores normais previstos nas Tabelas 15-1 e 15-2, ou aos padrões mínimos necessários para realizar uma tarefa específica, como atravessar uma rua dentro do tempo permitido pelos semáforos.† Essas são as duas normas mínimas propostas, com base em atividades de vida da comunidade: a capacidade de andar 300 metros (1.000 pés) em menos que 11,5 minutos (velocidade de marcha de 0,45 m/s ou 1 mph) e a capacidade de andar na velocidade de 1,3 m/s (3 mph) para 13 a 27 m (42 a 85 pés) para atravessar a rua com segurança. *Referências 13, 73, 80, 111, 118, 190, 208. † Referências 55, 57, 103, 153, 194, 195. Ciclo da Marcha • • Fase de apoio = 60% do ciclo de marcha Fase de balanço = 40% do ciclo de marcha 0% 10% 20% 30% 40% Contato do Desprendimento calcanhar direito dos dedos esquerdo Dentro de um ciclo da marcha, o corpo experimenta dois períodos de duplo apoio do membro (quando ambos os pés estão em contato com o solo simultaneamente) e dois períodos de apoio simples do membro (quando apenas um pé está no chão) (Fig. 15-10). Observa-se o primeiro período de duplo apoio de zero a 10% do ciclo. Durante esse período, o peso do corpo é transferido da esquerda para o membro inferior direito. O membro inferior direito está então em apoio simples, até 50% do ciclo da marcha ser atingido. Durante esse tempo, o membro inferior esquerdo está em sua fase de balanço e é avançado para a frente. O segundo período do duplo apoio dos membros ocorre 50 a 60% do ciclo e tem a finalidade de transferir o peso do corpo do membro inferior direito para o esquerdo. Finalmente, 60 a 100% do ciclo da marcha, o corpo encontra-se novamente em um apoio simples do membro, desta vez sobre o membro inferior esquerdo. Esse período de apoio simples do membro esquerdo corresponde à fase de balanço do membro inferior direito. Conforme aumenta a velocidade da marcha, a porcentagem do ciclo gasto no período de duplo apoio do membro torna-se menor (Fig. 15-9). Os marchadores têm o objetivo de andar o mais rápido possível mantendo sempre um pé em contato com o solo. Para esses atletas, maiores velocidades são alcançadas através do aumento da cadência e do comprimento do passo, minimizando os períodos de duplo apoio do membro para o ponto em que as fases de apoio e balanço são aproximadamente iguais. Ao se considerar que a velocidade máxima de marcha em adultos de 20 a 50 anos de idade é de aproximadamente 2,4 a 2,5 m/s (5,5 a 5,7 mph),14 a velocidade de marcha durante a marcha atlética pode ser superior a 3,3 m/s (7,5 mph).129,169 Durante a corrida, os períodos de duplo apoio do membro desaparecem e são substituídos por períodos em que ambos os pés estão fora do chão ao mesmo tempo. A transição do andar para a corrida normalmente ocorre a uma cadência de cerca de 180 passos/min ou a uma velocidade de aproximadamente 2,1 a 2,2 m/s (4,8 a 5,0 mph).43,163 Acima dessa velocidade é mais eficiente a energia para correr do que caminhar. Por outro lado, na velocidade de marcha lenta, os períodos de duplo apoio dos membros ocupam uma porcentagem cada vez 50% 60% 80% 90% Contato do Desprendimento dos calcanhar esquerdo dedos direito Fase de apoio direito 60% Apoio simples do membro direito 40% 100% Contato do calcanhar direito Fase de balanço direito 40% Fase de balanço esquerdo 40% Duplo apoio 10% 70% Fase de apoio de esquerdo 60% Duplo apoio 10% Apoio simples do membro esquerdo 40% FIGURA 15-10. Subdivisão do ciclo de marcha ilustra as fases de apoio e balanço e períodos de apoio simples e duplo apoio. neumann015.indd 634 26/5/2011 09:26:35 Capítulo 15 maior do ciclo da marcha. A marcha lenta proporciona maior estabilidade porque ambos os pés estão no chão simultaneamente para uma maior percentagem do ciclo. Na verdade, a velocidade reduzida, o comprimento de passo mais curto e a cadência mais lenta comumente vistos em pacientes idosos com medo de cair ou com déficits de força, serve para melhorar a estabilidade da marcha e prevenir quedas.96 TABELA 15-3. Terminologia que Define as Subdivisões do Ciclo da Marcha Fases Percentagem Eventos do do Ciclo Membro Oposto Eventos Contato do calcanhar Pé plano 0 8 10 SUBDIVISÃO DAS FASES DE APOIO E DE BALANÇO Cinco eventos específicos são geralmente descritos na fase de apoio: o contato do calcanhar, pé plano, médio apoio, desprendimento do calcanhar (ou elevação do calcanhar) e desprendimento dos dedos (Fig. 15-11 e Tabela 15-3). O contato do calcanhar é definido como o instante em que o calcanhar entra em contato com o solo, a 0% do ciclo da marcha. O pé plano corresponde ao instante no qual toda a superfície plantar do pé entra em contato com o solo. Esse evento ocorre aproximadamente a 8% do ciclo da marcha. O médio apoio na maioria das vezes é definido como o ponto no qual o peso do corpo passa diretamente sobre a extremidade inferior de apoio. É também definido como o momento em que o pé do membro inferior na fase de balanço passa o membro inferior na fase de apoio (ou seja, os pés estão lado a lado). A terceira definição do médio apoio é o momento em que o trocânter maior do fêmur está verticalmente acima do ponto médio do pé de apoio no plano sagital. Na realidade, todas as três definições correspondem a cerca de 30% do ciclo da marcha, ou 50% da fase de apoio. O desprendimento do calcanhar, período que varia consideravelmente entre os indivíduos, ocorre em algum ponto entre 30% e 40% do ciclo da marcha. Isso corresponde ao instante em que o calcanhar sai do solo. O desprendimento dos dedos, que ocorre a 60% do ciclo da marcha, é definido como o instante em que os dedos saem do solo. Um período referido como impulso também é usado com frequência. Esse período corresponde aproximadamente ao movimento de flexão plantar do tornozelo de 40 a 60% do ciclo da marcha. Embora haja uma quantidade significativa de variação na descrição da fase de balanço, esta fase é tradicionalmente subdividida em três seções: balanço inicial, médio e terminal (Fig. 15-11). O balanço inicial é o período desde o momento da retirada dos dedos até o balanço médio (60 a 75% do ciclo da marcha). O balanço médio corresponde ao período, pouco antes e ligeiramente após o médio apoio do membro inferior oposto, quando o pé do membro em balanço passa ao lado do pé do membro de apoio (75 a 85% do ciclo da marcha). O balanço terminal é o período compreendido entre o final do balanço médio até o pé entrar em contato com o solo (85 a 100% do ciclo da marcha). 0% EVENTOS PERÍODOS 8% 30% Contato do Pé calcanhar plano 635 Cinesiologia da Marcha Apoio Apoio médio Desprendimento dos dedos Balanço médio (25%-35%) 30 Desprendimento 30-40 do calcanhar 50 Desprendimento 60 dos dedos Balanço inicial 60-75 Balanço médio 75-85 Balanço final 85-100 Balanço Apoio médio (80%) Desprendimento do calcanhar (80%-90%) 90 Contato do calcanhar Contato do calcanhar 100 E N F O Q U E E S P EC IAL 15-2 Leva Tempo para Desenvolver suas Habilidades de Observação O s eventos do ciclo da marcha podem ser observados quando as pessoas andam em ambientes normais (ruas, shoppings, aeroportos). Como qualquer análise clínica, a análise da marcha observacional melhora com a prática. A observação repetida dos indivíduos com padrões de marcha normal aguça a capacidade de se reconhecer as variações e identificar os desvios da marcha anormal. As oportunidades para a prática desta destreza com uma pessoa já treinada em análise observacional de marcha aumenta essas habilidades. Uma terminologia substituta e relativamente mais recente, proposta por Perry,147 consiste em oito eventos que dividem o ciclo da marcha em sete períodos (Fig. 15-12). Os eventos são: contato 40% 60% Médio apoio Desprendimento do calcanhar 75% 85% Desprendimento dos dedos Impulso Balanço inicial 100% Contato do calcanhar Médio balanço Balanço terminal FIGURA 15-11. Subdivisões tradicionais do ciclo da marcha. neumann015.indd 635 26/5/2011 09:26:36 636 Seção IV Extremidade Inferior 0% EVENTOS Contato inicial 10% Desprendimento dos dedos opostos PERÍODOS Resposta à carga TAREFAS Aceitação do peso FASES 30% 50% Elevação do calcanhar Médio apoio 60% 73% Contato Desprendimento inicial oposto dos dedos Apoio terminal Prébalanço Apoio simples do membro Balanço inicial 100% Tíbia vertical Médio balanço Próximo contato inicial Balanço terminal Avanço do membro Fase de apoio CICLO Pés adjacentes 87% Fase de balanço Ciclo da marcha direito FIGURA 15-12. Terminologia para descrever os eventos do ciclo da marcha. O contato inicial corresponde ao início do apoio, quando o pé tem o primeiro contato com o solo a 0% do ciclo da marcha. O desprendimento dos dedos opostos ocorre quando o pé contralateral sai do chão a 10% do ciclo da marcha. A elevação do calcanhar corresponde ao levantamento do calcanhar do solo e ocorre, aproximadamente, a 30% do ciclo da marcha. O contato inicial oposto corresponde ao contato do pé do membro oposto, normalmente a 50% do ciclo da marcha. O desprendimento dos dedos ocorre quando o pé deixa o solo a 60% do ciclo da marcha. Os pés adjacentes ocorrem quando o pé do membro em balanço está próximo ao pé do membro em apoio, a 73% do ciclo da marcha. A tíbia vertical corresponde à tíbia do membro em balanço orientada no sentido vertical, a 87% do ciclo da marcha. O evento final é, novamente, o contato inicial, que, na verdade, é o início do próximo ciclo de marcha. Esses oito eventos dividem o ciclo de marcha em sete períodos. A resposta à carga entre o contato inicial e o desprendimento dos dedos opostos corresponde ao período quando o peso é aceito pelo membro inferior, que está iniciando o contato com o solo. O médio apoio ocorre do desprendimento dos dedos opostos à elevação do calcanhar (10 a 30% do ciclo da marcha). O apoio terminal se inicia quando o calcanhar se eleva, e termina quando o membro inferior contralateral toca o solo, de 30% a 50% do ciclo da marcha. Pré-balanço ocorre do contato do pé do membro inferior contralateral ao desprendimento dos dedos do pé ipsilateral, que é o período correspondente ao segundo duplo apoio do ciclo de marcha (50% a 60% do ciclo da marcha). O balanço inicial ocorre quando o desprendimento dos dedos aos pés adjacentes, quando o pé do membro em balanço está próximo do membro em apoio (60 a 73% do ciclo da marcha). O médio balanço ocorre dos pés adjacentes, para quando a tíbia do membro em balanço está vertical (73 a 87% do ciclo da marcha). O balanço terminal ocorre da posição vertical da tíbia para pouco antes do contato do calcanhar (87 a 100% do ciclo da marcha). Os primeiros 10% do ciclo da marcha corresponde à aceitação de peso – quando a massa do corpo é transferida de um membro inferior para outro. O apoio simples, de 10% a 50% do ciclo da marcha, serve para sustentar o peso do corpo, enquanto o membro oposto está à frente. Os últimos 10% da fase de apoio e toda fase de balanço serve para avançar o membro para uma nova posição à frente. inicial, desprendimento dos dedos opostos, elevação do calcanhar, contato oposto inicial, desprendimento dos dedos, pés adjacentes, tíbia vertical e contato inicial para a passada seguinte. Os quatro períodos durante o apoio são resposta à carga, médio apoio, apoio terminal e pré-balanço. A fase de balanço tem três períodos: balanço inicial, médio e terminal. Com poucas exceções, essa terminologia, no geral, concorda com a descrição anterior de marcha. A existência de duas diferentes terminologias pode confundir, especialmente quando utilizadas alternadamente. Neste capítulo, a terminologia proposta por Perry, em 1992, é utilizada predominantemente.147 Para eliminar a confusão, o período de eventos durante a marcha é mais frequentemente descrito como uma porcentagem do ciclo da marcha. DESLOCAMENTO E CONTROLE DO CENTRO DE MASSA CORPORAL Caminhar pode ser definido como uma série de perdas e recuperações de equilíbrio. A deambulação é iniciada ao permitir que o neumann015.indd 636 corpo se incline para frente. Para as quedas serem evitadas, as recuperações momentâneas do equilíbrio são alcançadas pelo movimento da frente do pé para um novo local. Uma vez que a marcha é iniciada, o impulso do corpo para a frente leva o centro de massa (CM) do corpo além do novo local do pé, necessitando de um passo para frente com o outro pé. A progressão para a frente é então realizada pela sucessiva e alternada recolocação dos pés. A transição suave entre a perda e a recuperação do equilíbrio continua enquanto o deslocamento para a frente com o corpo é desejado. A deambulação cessa quando a colocação do pé detém o movimento para a frente do corpo e o equilíbrio é restabelecido sobre a base estática de apoio. Embora esta descrição forneça uma explicação útil e relativamente precisa da marcha, é necessário salientar que a marcha exige também a participação ativa da musculatura dos membros inferiores e, consequentemente, um gasto energético. Deslocamento do Centro de Massa O CM do corpo está localizado anteriormente à segunda vértebra sacral, mas a melhor visualização do movimento do CM é acom- 26/5/2011 09:26:36 Capítulo 15 Cinesiologia da Marcha 637 Deslocamento vertical do CM 5 cm A 5 4 3 2 1 0 0% 5% 10% 20% 30% 40% 50% 55% 60% 70% 80% 90% 100% Deslocamento lateral do CM Esquerdo B 4 cm 2 1 0 −1 −2 Direito FIGURA 15-13. Centro de deslocamento de massa (CM) durante a marcha. Os deslocamentos vertical e lateral do CM estão ilustrados em A e B, respectivamente. O CM está na posição mais baixa e mais central, na direção lateral, no meio do duplo apoio (5% e 55% do ciclo da marcha), uma posição de relativa estabilidade com os dois pés no chão. Por outro lado, o CM está na sua posição mais alta e lateral no médio apoio (30% e 80% do ciclo da marcha) – uma posição de relativa instabilidade. Durante o apoio simples do membro, a trajetória da CM nunca está diretamente sobre a base de apoio. Esse fato é ilustrado em B, com a projeção vertical do CM sempre localizada entre as pegadas. panhar o deslocamento da cabeça ou do tronco. Claramente, o deslocamento mais notável do corpo durante a marcha é para a frente (Fig. 15-13). Sobrepostos a este deslocamento para frente, no entanto, estão dois padrões de movimento sinusoidal, que correspondem ao movimento do CM nas direções vertical e lateral. No sentido vertical, o CM oscila para cima e para baixo, para descrever duas ondas senoidais por ciclo de marcha (Fig. 15-13, A). Este movimento do CM é melhor compreendido ao se olhar para o indivíduo de lado. A altura mínima do CM ocorre no ponto médio dos dois períodos de duplo apoio do membro (5% e 55% do ciclo de marcha). A altura máxima do CM ocorre no ponto médio dos dois períodos de apoio simples do membro (30% e 80% do ciclo da marcha). Um total de deslocamento vertical de cerca de 5 cm é observado na velocidade média no adulto masculino. Deslocamento do Centro de Massa • • Deslocamento vertical total: 5 cm Deslocamento lateral total: 4 cm Durante a deambulação o CM também é deslocado alternadamente do membro inferior direito para o esquerdo, criando um simples padrão sinusoidal lado a lado (da direita para a esquerda) por ciclo de marcha (Fig. 15-13, B). A posição máxima do CM para a direita ocorre no meio da fase de apoio no membro inferior direito (30% do ciclo da marcha) e a posição do CM máximo para neumann015.indd 637 a esquerda ocorre na metade da fase de apoio sobre o membro inferior esquerdo (80% do ciclo da marcha). Um deslocamento lateral total de aproximadamente 4 cm ocorre durante a deambulação normal.83 A quantidade de deslocamento aumenta quando o indivíduo tem uma base ampla de apoio durante a marcha (i. e., caminha com os pés mais afastados entre si) e diminui com uma base mais estreita de apoio (ou seja, caminha com os pés mais juntos). A próxima consideração é o padrão de movimento total do CM durante um ciclo completo (Fig. 15-13). Começando logo após o contato do calcanhar direito, o CM move-se para frente, para cima e em direção ao pé direito. Essa direção geral do movimento continua durante os primeiros 30% do ciclo de marcha – quando o corpo está essencialmente “subindo e deslocando sua massa” sobre o membro inferior de apoio. Na posição de médio apoio direito, o CM alcança sua posição mais alta e lateral para a direita. Logo após o médio apoio direito, o CM continua em frente, mas começa a se mover em um sentido descendente e para o lado esquerdo do corpo – que está essencialmente “caindo” da extremidade inferior de apoio. Este é um momento crítico no ciclo da marcha. Com a perna esquerda na sua fase de balanço, o corpo depende do membro inferior esquerdo para fazer o contato seguro com o solo, a fim de aceitar a transferência de peso e evitar uma queda. Logo após o contato do calcanhar esquerdo, durante a fase de duplo apoio do membro, o CM está localizado a meio caminho entre os pés e alcança sua posição mais baixa, uma vez que continua a avançar para o membro inferior esquerdo. Do desprendimento dos dedos do pé direito para o médio apoio do membro 26/5/2011 09:26:36 638 Seção IV Extremidade Inferior a deambulação ser uma função direta de sua velocidade (Equação 15-1), a energia cinética mínima está presente no médio apoio (30% e 80% do ciclo da marcha) e a energia cinética máxima é atingida no duplo apoio (5% e 55% do ciclo da marcha) (Fig. 15-14). inferior esquerdo (80% do ciclo da marcha), o CM avança para cima e em direção ao membro inferior esquerdo, que agora está em apoio. A menos de 80% do ciclo da marcha, o CM está novamente em seu ponto mais alto, porém em sua posição mais lateral para a esquerda. Pouco depois do médio apoio à esquerda, o movimento do CM desloca-se para baixo e para o lado direito do corpo. O ciclo da marcha se conclui e o processo é repetido quando o calcanhar direito entra em contato com o solo. Notável é o fato de que o CM nunca está localizado diretamente sobre a base de apoio do corpo durante o apoio simples do membro (Fig. 15-13, B). Esse fato ilustra o desequilíbrio relativo do corpo durante a marcha, especialmente durante o apoio simples do membro, quando o pé deve estar posicionado ligeiramente lateral à projeção vertical do CM corporal, para controlar seu movimento lateral. A localização adequada do pé pelo movimento do quadril no plano frontal (ou seja, abdução e adução do quadril) é crucial, considerando a limitada capacidade dos músculos da articulação subtalar em controlar o movimento lateral do CM.203 Energia cinética = 0,5mv2 (Equação 15.1) onde m é a massa do corpo e v é a velocidade do CM do corpo. A energia cinética é complementada pela energia potencial (Fig. 15-14). A energia potencial é uma função da massa do corpo, do campo gravitacional que age sobre o corpo e da altura do CM do corpo (Equação 15.2). Durante a marcha, a energia potencial máxima é alcançada quando o CM atinge seu ponto mais alto (30% e 80% do ciclo da marcha). A energia potencial mínima do corpo ocorre no duplo apoio (5% e 55% do ciclo da marcha), quando o CM do corpo está nos pontos mais baixos. Energia Potencial = mgh Considerações sobre Energia Cinética e Potencial Embora caminhar pareça ocorrer em uma velocidade constante, o corpo realmente acelera e desacelera um pouco a cada passo. Quando o membro inferior de apoio está à frente do CM do corpo, este fica mais lento. Inversamente, quando o membro inferior de apoio está por trás do CM do corpo, acelera. O corpo atinge a sua velocidade mais baixa, portanto, no médio apoio, uma vez que “subiu” no membro inferior de apoio; e sua maior velocidade durante o duplo apoio do membro, uma vez que “caiu” a partir do membro inferior de apoio e antes de “subir” no membro oposto. Devido à energia cinética do corpo durante (Equação 15.2) onde m é a massa do corpo, g é a aceleração descrescente potencial, resultante da gravidade e h é a altura do CM. Em uma representação gráfica das mudanças na energia cinética e potencial durante a marcha, a relação entre as curvas é facilmente observada (Fig. 15-14). Os tempos da energia potencial máxima correspondem aos tempos da energia cinética mínima e vice-versa. À medida que a energia potencial é perdida do médio apoio para o duplo apoio do membro (o CM do corpo vai do seu ponto mais alto para sua posição mais baixa), a energia cinética é adquirida (o CM do corpo passa do mínimo para a velocidade máxima). Por Transferência de energia durante a marcha Energia potencial Energia cinética Nível de energia durante a marcha 0% 5% 10% 20% 30% 40% 50% 55% 60% 70% 80% 90% 100% FIGURA 15-14. Transferência entre a energia cinética e potencial durante a marcha. O mínimo de energia potencial existe quando o centro de massa (CM) está em sua menor pontuação (5% e 55% do ciclo da marcha). A energia potencial máxima ocorre quando o CM está na sua maior pontuação (30% e 80% do ciclo da marcha). O inverso ocorre para a energia cinética. Esta transferência entre energia cinética e potencial é análoga a andar em uma bicicleta que ganha velocidade enquanto desce um morro e perde velocidade enquanto sobe a próxima colina. neumann015.indd 638 26/5/2011 09:26:36 672 Seção IV Extremidade Inferior Conexões Clínicas Adicionais CONEXÃO CLÍNICA 15-1 Ativação Muscular Excêntrica, Isométrica ou Concêntrica: É Realmente Sempre Conhecida como Certa Muita atenção tem sido dada neste capítulo para o tipo de ativação de um músculo ou grupo muscular durante as diferentes partes do ciclo da marcha. Em um sentido amplo, a ativação isométrica ocorre quando um músculo ativado não muda de comprimento. A ativação concêntrica ocorre quando o músculo ativado realmente se encurta (contrai-se), ao passo que a ativação excêntrica ocorre quando o músculo alonga-se por alguma outra força mais dominante. Conforme descrito no Capítulo 3, a produção de força de um músculo depende do seu tipo de ativação, dado um esforço constante. Esta questão é, portanto, muito relevante para o estudo da marcha. Na maioria das configurações clínicas ou laboratoriais, o tipo específico de ativação de um músculo pode ser estimado comparando a sua ação estabelecida contra a direção de rotação da articulação que o músculo está atravessando. Por exemplo, o tibial anterior assume uma experiência de ativação excêntrica após o contato do calcanhar, baseado no fato de que o tornozelo está em flexão plantar no momento em que esse músculo dorsiflexor primário está ativo. Esta ligação clínica considera variáveis que podem interferir com a lógica deste método prático de análise. Primeiro, considere um músculo pluriarticular do membro inferior ativado. Não é incomum para tal músculo contrair-se através de uma articulação e ao mesmo tempo ser alongado através de uma articulação mais proximal ou distal. A cinemática articular ilustrada na Figura 15-15 proporciona uma oportunidade para considerar tal situação, para os músculos pluriarticulares que atuam principalmente no plano sagital. Por exemplo, pode não ser possível determinar com absoluta certeza a mudança no comprimento do músculo reto femoral ativado quando estiverem sendo alongado pela extensão do quadril e, simultaneamente, encurtado com a extensão do joelho em 15 a 40% do ciclo da marcha. Analogamente, determinar a variação real no comprimento do gastrocnêmio pode ser bastante desafiador, quando se considera a combinação dos movimentos do tornozelo e do joelho durante a marcha.63,84 O fato de a mudança no comprimento do músculo ser afetado pela alteração no comprimento das fibras musculares ativadas e no estiramento do seu tendão aumenta a complexidade do processo de estimar o tipo de ativação que o músculo enfrenta durante a marcha. Baseado em sua rigidez, um tendão pode alongar-se significativamente quando sob carga. O tendão do calcâneo, por exemplo, alonga-se até 8% do seu comprimento de repouso depois de uma contração máxima dos músculos da panturrilha.108 A magnitude do alongamento é dependente da arquitetura específica da unidade músculo-tendão, mas também da quantidade e da taxa de aplicação neumann015.indd 672 da força. Esta propriedade fisiológica de um tendão pode obscurecer a alteração do comprimento real da unidade músculo-tendão durante toda a ativação. É possível que em algumas condições cinemáticas, dependendo do músculo, toda contração das fibras musculares pode ser compensada por um alongamento similar do tendão. Neste exemplo, uma ativação previamente considerada isométrica para a unidade músculo-tendão (com base na ausência de mudança no ângulo articular) pode, de fato, ser um pouco concêntrica no nível das fibras musculares. A ultrassonografia em tempo real oferece a capacidade de fazer medições diretas do comprimento das fibras musculares durante o movimento dinâmico.29,30,109 Esta técnica foi utilizada para estudar a função específica do vasto lateral durante a marcha, logo após o contato do calcanhar, no período em que este músculo é fortemente ativado e considerado ativo excentricamente. Apesar de o joelho mover-se em direção à flexão, o comprimento das fibras musculares realmente permaneceu relativamente constante – a carga colocada no músculo causou alongamento significativo do tendão do vasto lateral. Os autores do estudo também observaram resultados semelhantes quando analisaram as fibras musculares do tibial anterior, imediatamente após o contato do calcanhar – quando o músculo é fortemente ativado, com o tornozelo movendo-se em direção à flexão plantar. Em ambos os cenários, observou-se uma ativação anteriormente excêntrica para toda a unidade músculo-tendão ser essencialmente isométrica por natureza nas fibras musculares. O alongamento do tendão é provavelmente utilizado para amortecer o impacto sobre todo o músculo e para armazenar a energia elástica.29 Estes dados expõem a simplificação de interpretar um tipo de ação muscular com base somente em dados eletromiográficos e cinemáticos. Em alguns músculos, especialmente durante os movimentos de arco curto como os descritos anteriormente, a complacência dentro do tendão (e outros tecidos conjuntivos) pode ser responsável por algumas ou todas as mudanças no movimento articular. É interessante considerar que os dois fatores destacados nesta conexão clínica – músculos pluriarticulares e complacência do tendão – podem minimizar as alterações de comprimento das fibras musculares durante o movimento e, assim, ajudar a manter o músculo na porção ideal de sua curva comprimento-tensão. Esta conexão clínica não pretende negar o método padrão empírico para inferir se um músculo está ativado isométrica, concêntrica ou excentricamente, mas sim destacar o potencial de limitação desse método em avaliar todos os músculos ao longo de um vasto leque de funções. 26/5/2011 09:26:46 Capítulo 15 673 Cinesiologia da Marcha Conexões Clínicas Adicionais CONEXÃO CLÍNICA 15-2 Marcha e Corrida — Uma Transição Cinesiológica Parâmetros temporais em função da velocidade de locomoção A Duração do ciclo (segundos) 1,5 1,3 1,1 0,9 0,7 X W R 0,5 3 5 12 7 9 Velocidade (km/h) 80 B Duração do apoio (%ciclo) A corrida, uma progressão natural da locomoção bípede quando precisamos avançar mais rapidamente, compartilha muito dos mesmos princípios cinesiológicos fundamentais da marcha. No entanto, diferenças notáveis devem ser consideradas para fornecer uma avaliação ideal e intervenções para aqueles que procuram cuidados para as lesões relacionadas à corrida. Não é incomum as pessoas com deficiência nos membros inferiores se queixarem de dor quando correm e não durante a marcha. Semelhante a caminhar, correr é uma ação cíclica que pode ser resumida através da descrição de um ciclo completo – do contato do pé de um membro para o próximo contato do pé do mesmo membro. Além disso, como a marcha, embora um padrão geral de movimento seja descrito para a corrida, a cinemática da articulação e da cinética, bem como a intensidade e o tempo de ativação muscular, diferem substancialmente em todo o espectro da velocidade, de movimentar-se lentamente até a corrida. Esta cinesiologia dependente da velocidade é frequentemente implicada nas lesões relacionadas à corrida, uma vez que correr mais rápido geralmente requer uma maior amplitude de movimento, velocidade e geração de forças. A falta de acomodações progressivas para estas grandes demandas sobre o sistema musculoesquelético dos membros inferiores gera um potencial para as lesões como tendinites e fraturas por estresse.81,186 Em geral, na descrição da corrida fornecida aqui, serão mantidos os termos gerais e os valores típicos que se aplicam à execução em uma corrida de velocidade moderada. Uma transição individual do caminhar para correr é alcançada não por causa da incapacidade de andar mais rápido, mas pela maior eficiência energética da corrida, quando comparada a uma velocidade de marcha de aproximadamente 2,1 a 2,2 m/s43,157,163 Por definição, a corrida ocorre quando os dois períodos de duplo apoio do membro durante a marcha são substituídas por dois períodos de “voo” – quando os pés estão fora do chão ao mesmo tempo. Ao passar do caminhar para correr, a duração da fase de apoio de cada membro cai repentinamente, de 60 para 40% do ciclo. Quanto mais rápido a velocidade de corrida, menor a duração do ciclo e menor o percentual da fase de apoio no ciclo total da corrida (Fig. 15-51). Mecanicamente, quando se passa da marcha para a corrida, o corpo faz a transição de um modo de locomoção semelhante a um pêndulo invertido para outro semelhante a uma “mola”.22,156 A transferência cíclica da energia potencial e cinética que ocorre ao longo de um membro em apoio relativamente estendido durante a marcha foi substituída por uma estratégia que aproveita a energia elástica armazenada inicialmente e, em seguida, liberada pelos músculos, tendões e outros tecidos conjuntivos, no membro do apoio parcialmente flexionado durante a corrida (Fig. 15-52). Através da observação visual, deve ser facilmente perceptível que os movimentos das articulações dos membros inferiores ocorrem muito mais rapidamente durante a corrida em comparação com a 60 40 X W R 20 3 5 7 9 12 Velocidade (km/h) Marcha Corrida FIGURA 15-51. Tempo de duração de um ciclo de marcha e corrida ao longo de um intervalo da marcha e velocidades de corrida (A). Duração da fase de apoio sobre um intervalo da marcha e velocidades de corrida (B). Nota: 5 km/h (1,3 m/s) é o reflexo de uma velocidade _ média da marcha (indicado por X ) e 7 km/h (2m/s) é reflexo da velocidade de transição, quando o indivíduo passa do caminhar para a corrida (indicado por W → R). (Dados de Cappelini G, Ivanenko YP, Poppele RE, Lacquaniti F: Motor patterns in human walking and running, J Neurophysiol 95:3426, 2006.) marcha. Isso ocorre principalmente por causa da curta duração do ciclo de marcha, mas também, embora em menor medida, da maior amplitude de movimento articular utilizado para a corrida.24 No quadril, no plano sagital, o padrão de movimento durante a corrida é muito semelhante ao que ocorre durante a marcha, com exceção de uma quantidade maior de flexão do quadril no contato inicial do pé e a extensão do quadril um pouco mais leve no desprendimento dos dedos. O padrão de movimento do joelho no plano sagital durante a corrida também é semelhante ao da marcha, com a exceção de uma maior quantidade de flexão do joelho durante o ciclo completo. Durante a corrida, o joelho está flexionado de 20 a 30 graus no contato inicial, antes de flexionar alguns graus adicionais na parte Continua neumann015.indd 673 26/5/2011 09:26:46 674 Seção IV Extremidade Inferior Conexões Clínicas Adicionais CONEXÃO CLÍNICA 15-2 Marcha e Corrida — Uma Transição Cinesiológica —cont. Corrida Marcha FIGURA 15-52. As imagens superiores ilustram diagramas que representam os ciclos da marcha e da corrida e mostram a atitude um pouco mais flexionada do membro inferior durante as fases de apoio e balanço de corrida. As imagens inferiores retratam a trajetória do centro de massa durante a marcha e a corrida. O centro de massa se assemelha a um pêndulo invertido durante a marcha, o que indica a transferência entre o potencial “fora de fase” a energia cinética (compare com a Figura 15-14). Isso está em contraste com a corrida, que tira proveito de uma transferência entre o potencial “em fase”, a energia cinética do corpo e a energia elástica dos músculos, dos tendões e de outros tecidos conjuntivos dos membros inferiores. (Dados de Cappelini G, IvanenkoYP, Poppele RE, Lacquaniti F: Motor patterns in human walking and running, J Neurophysiol 95:3426, 2006.) inicial do apoio. Isso é seguido por uma pequena quantidade de extensão do joelho, retornando para o ângulo de flexão no contato inicial antes de começar a flexionar novamente, pouco antes do desprendimento dos dedos para iniciar a fase de balanço. Perante esta atitude relativamente flexionada do membro de apoio e a necessidade de mover o membro do balanço mais rapidamente, a flexão máxima do joelho durante o balanço é de 80 a 110 graus – novamente, ângulos específicos variam com a velocidade de corrida. Na velocidade lenta de corrida, similar à marcha, a maioria dos corredores faz o contato inicial com o solo com a região do calcanhar. Esses corredores são frequentemente referidos como atacantes retropé. Aqueles que, em vez disso, fazem contato com o solo inicial com todo o pé ou com a região do antepé, são chamados atacantes mediopé e antepé, respectivamente. À medida que aumenta a velocidade de corrida, a maioria dos corredores progressivamente altera a região do contato inicial para o antepé. Independentemente do padrão de contato do pé, em geral, o tornozelo está perto de uma posição neutra no contato inicial do pé. O contato inicial é imediatamente seguido por um movimento de dorsiflexão do tornozelo. Esse movimento de dorsiflexão resulta, em parte, de uma grande flexão do joelho que está presente neumann015.indd 674 durante a corrida e exige controle excêntrico dos flexores plantares do tornozelo. Isso está em nítido contraste com a pequena quantidade de flexão plantar do tornozelo, controlada por uma ação excêntrica dos dorsiflexores para gerar um torque interno de dorsiflexão (Fig. 15-53), e ocorre imediatamente após o contato do calcanhar durante a marcha. O movimento de dorsiflexão que ocorre no início do apoio, até aproximadamente 20 graus, é seguido por uma rápida flexão plantar (até cerca de 30 graus) no apoio terminal, antes do desprendimento dos dedos. Tal como acontece na marcha, o tornozelo, então, retorna para a dorsiflexão durante o balanço. Nos planos frontal e transversal os padrões globais cinemáticos que ocorrem no quadril (rotação interna e adução seguido de rotação externa e abdução), no joelho e no pé (pronação seguida pela supinação) durante a fase de apoio da corrida são semelhantes aos observados durante a marcha. As principais diferenças são que os movimentos articulares ocorrem em maior velocidade angular e normalmente são alguns graus de maior magnitude. Acredita-se que esses movimentos, tanto de amplitude excessiva como mal controlada, ou ambos, muitas vezes contribuem para lesões agudas e crônicas dos membros inferiores. Clinicamente, a observação e quantificação desses movimentos são difíceis, mas, no entanto, de extrema importância na determinação de estratégias de intervenção ideal (Enfoque Especial 15-8).50,121,170 Como se supõe, a Figura 15-53 mostra que as forças de reação vertical do solo durante a corrida são de uma magnitude maior do que aquelas medidas durante a marcha. Nesta ilustração, a forma suave do pico da curva é a característica de um corredor que faz o contato inicial com o antepé – os flexores plantares do tornozelo fácil e suavemente transferem o impacto da carga para as forças de propulsão. O perfil vertical da força de reação do solo de um atacante retropé exibe um pico de impacto inicial adicional e bastante característico nos primeiros 10% da fase de apoio. As forças de reação vertical do solo durante a corrida podem ser tão elevadas, quanto três a quatro vezes o peso corporal e progressivamente maiores à medida que a velocidade de corrida aumenta. No sentido anteroposterior, semelhante ao que ocorre durante a marcha, tanto os atacantes retropés quanto os antepés mostram uma força de ruptura inicial na primeira metade do apoio, seguido por uma força propulsora na segunda metade do apoio. A magnitude da velocidade-dependente dessas forças varia de 0,3 a 0,6 vez o peso corporal, que é duas a quatro vezes a magnitude das medidas durante a marcha.24,88 As grandes forças de reação do solo combinadas com a maior frequência de movimentos articulares angulares durante a corrida estão associadas ao maior torque interno articular. A Figura 15-53 compara as curvas de torque interno articular para marcha e corrida para o quadril, o joelho e o tornozelo. As formas das curvas para o quadril e o joelho são geralmente semelhantes para marcha e corrida, mas os torques internos articulares são de maior magnitude durante 26/5/2011 09:26:46 Capítulo 15 675 Cinesiologia da Marcha Conexões Clínicas Adicionais CONEXÃO CLÍNICA 15-2 Marcha e Corrida — Uma Transição Cinesiológica — cont. A Torque interno da articulação do quadril (Nm/kg) Plano cinético sagital 1,5 1 EXTENSÃO 0,5 0 −0,5 FLEXÃO B Torque interno da articulação do joelho (Nm/kg) 3 2 1 EXTENSÃO 0 FLEXÃO C Torque interno da articulação do tornozelo (Nm/kg) −1 2 1 FLEXÃO PLANTAR 0 DORSIFLEXÃO D FRS vertical (% peso corporal) 3 2 1 0 0 10 20 30 40 50 60 70 80 90 100 Percentagem do ciclo Corrida Marcha FIGURA 15-53. Torques internos para o quadril no plano sagital (A), para o joelho (B) para o tornozelo (C) e as forças de reação vertical do solo (FRS) (D) para um ciclo da marcha (5,4 km/h) e corrida (9,4 km/h) de um indivíduo. Linhas verticais tracejadas em azul e laranja indicam a transição entre as fases de apoio e de balanço. (Dados de Cappelini G, IvanenkoYP, Poppele RE, Lacquaniti F: Motor patterns in human walking and running, J Neurophysiol 95:3426, 2006.) a corrida. No tornozelo, o perfil do torque articular para a corrida é notavelmente diferente daquele durante a marcha, com a ausência do torque inicial de dorsiflexão. Este reflexo da cinemática no tornozelo, com o contato inicial, é imediatamente seguido por um movimento de (perna-sobre-pé) dorsiflexão. O padrão e a magnitude do torque articular no tornozelo variam significativamente com base na velocidade de corrida e nos corredores, de acordo com a forma com que o pé faz contato inicial com o solo. Em comparação com aqueles que fazem o contato inicial do calcanhar com o solo, os atacantes confiam muito mais fortemente nos flexores plantares do tornozelo para amortecer a carga inicial sobre o membro inferior. Determinar o padrão de contato do pé com o solo faz parte de uma avaliação global de corredores com lesões dos membros inferiores, especialmente as lesões no pé, no tornozelo e na perna. Conforme descrito neste capítulo, a potência através de uma articulação é o produto do torque e a velocidade angular. Portanto, não é surpreendente que a energia gerada ou absorvida através das articulações dos membros inferiores durante a corrida é várias vezes a magnitude daquela registrada durante a marcha. A presença de maior potência e torque é expressa através do aumento significativo da ativação muscular medida durante a corrida em comparação com a marcha. A Figura 15-54 mostra a magnitude e o padrão de ativação de quatro músculos representativos, comparando a marcha a 5 km/h (uma média de velocidade de marcha) e corrida a 9 km/h (uma velocidade de corrida lenta). O vasto medial e o glúteo médio são reflexos da musculatura mais proximal, mostrando um padrão de ativação relativamente semelhante durante a marcha e a corrida. Por outro lado, as mudanças consistentes na cinemática e cinética do tornozelo e os padrões de ativação da musculatura do tornozelo, do tibial anterior e do gastrocnêmico são particularmente diferentes entre a marcha e a corrida. Para todos os músculos, uma ativação muscular progressivamente maior é observada durante a corrida, e esta diferença é amplificada com o aumento da velocidade. (Consulte Cappellini et al.22 para os perfis de ativação muscular de 32 músculos através de um espectro de velocidades de marcha e corrida.) Sob uma perspectiva de prevenção de lesões, uma das mais importantes diferenças entre caminhar e correr é a magnitude das forças aplicadas ao sistema musculoesquelético (Tabela 15-6). A magnitude e a natureza repetitiva dessas forças exigem força e resistência adequadas da musculatura dos membros inferiores, bem como a adaptação progressiva do tecido ao longo do tempo. Além disso, é importante considerar a influência de fatores tais como a velocidade de marcha e a inclinação da superfície, que modificam a cinemática e a cinética da corrida e as exigências sobre o sistema, e a forma que, potencialmente, leva a lesões. Clinicamente, “erros de treinamento” que levam a lesões durante a corrida são mais facilmente identificados e compreendidos com o conhecimento de como a cinemática e a cinética mudam ao longo da transição das velocidades da marcha e da corrida. Continua neumann015.indd 675 26/5/2011 09:26:47 676 Seção IV Extremidade Inferior Conexões Clínicas Adicionais CONEXÃO CLÍNICA 15-2 Marcha e Corrida — Uma Transição Cinesiológica — cont. Intensidade relativa da EMG durante a marcha e a corrida Glúteo médio FIGURA 15-54. Intensidade relativa e perfil de ativação de quatro músculos selecionados durante a marcha (5 km/h) e corrida (9 km/h). As linhas verticais tracejadas em azul e laranja indicam a transição entre as fases de apoio e de balanço. (Dados de Cappelini G, IvanenkoYP, Poppele RE, Lacquaniti F: Motor patterns in human walking and running, J Neurophysiol 95:3426, 2006.) Vasto medial Gastrocnêmio Tibial anterior 0 10 20 30 40 50 60 70 80 90 100 Porcentagem do ciclo Marcha neumann015.indd 676 Corrida 26/5/2011 09:26:47
Download