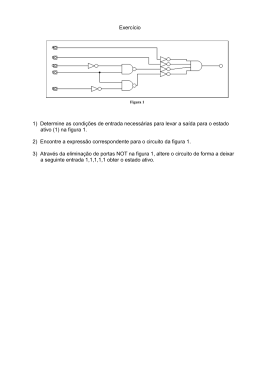
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO. CAMPUS SÃO JOSÉ DOS CAMPOS Almir Junior Guilherme da Silva Vianna Mariane de Sousa Ferreira Thais Caroline Aparecida Nunes Veículo Seguidor de Trilha Trabalho de Conclusão de Curso apresentado ao Instituto Federal de Educação, Ciência e Tecnologia de São Paulo – Campus São José dos Campos, como requisito para obtenção do Título de Técnico em Automação Industrial sob orientação do Professor André Luiz Mendes Moura. São José dos Campos 2014 BANCA EXAMINADORA Trabalho de Conclusão de Curso (TCC) defendido e aprovado em 18 de junho de 2014, pela banca examinadora constituída pelos professores: _______________________________________________ Prof. André Luiz Mendes Moura Orientador _______________________________________________ Prof. Fernando Henrique Gomes de Souza _______________________________________________ Engº. Danilo Eduardo Braga ii Dedicatória Dedicamos primeiramente a Deus e em especial a toda nossa Direção, Coordenação, Funcionários e todo corpo Docente que com carinho e dedicação nos preparou para trilhar o caminho certo e seguro de uma profissão e que compõe esta maravilhosa equipe. iii Agradecimentos Agradecemos primeiramente a Deus e a todos que nos incentivaram e apoiaram. Em especial gostaríamos de agradecer: Ao orientador, André Luiz Mendes Moura, por acreditar em nossa capacidade e valorizar o nosso trabalho. Aos professores Aguinaldo, Sinohara, Celso, Claudio, por toda a disposição, atenção e ensinamentos dispensados no decorrer desses anos. Aos nossos familiares, Etelma e Daniel, Nagib, Luzia e Anderson, Almir e Marta pelo incentivo, companheirismo e amor. iv SUMÁRIO LISTA DE TABELAS ................................................................................................... vi LISTA DE FIGURAS .................................................................................................. vii LISTA DE ABREVIATURAS E SÍMBOLOS ............................................................... viii RESUMO.................................................................................................................... ix 1. INTRODUÇÃO ........................................................................................................ 1 2. OBJETIVO.............................................................................................................. 3 3. REVISÃO BIBLIOGRÁFICA. ................................................................................... 4 3.1 Amplificadores Operacionais. ............................................................................ 4 3.2 LDR.................................................................................................................... 6 3.2.1 Utilização do LDR........................................................................................ 7 3.3 Motores de Corrente Contínua .......................................................................... 9 3.3.1 Funcionamento do Motor ............................................................................ 9 4. MÉTODOS e MATERIAIS ..................................................................................... 10 4.1. Métodos ......................................................................................................... 10 4.2.1. Elaboração do veículo .............................................................................. 10 4.2.2. Escolha dos materiais .............................................................................. 10 5. RESULTADOS E DISCUSSÕES ........................................................................... 13 6. CONCLUSÃO........................................................................................................ 13 7. REFERÊNCIAS BIBLIOGRÁFICAS ...................................................................... 16 v LISTA DE TABELAS Tabela 1- Valores de resistência em função da luminosidade....................................07 Tabela 2- Valores para escolha de Resistores...........................................................11 vi LISTA DE FIGURAS Figura 1 - veículo seguidor de faixa (Volkswagen 2014) ............................................. 1 Figura 2 - Amp Op IDEAL (Malvino 2011) ................................................................... 4 Figura 3 - Multiplicador inversor de ganho constante (Boylestad 2012) ...................... 4 Figura 4 - Estilos de encapsulamento do 741 e pinagem (Malvino 2011) ................... 5 Figura 5 – Amplificador Somador (Malvino 2011) ........................................................ 5 Figura 6- Circuito formato Somador Inversor .............................................................. 6 Figura 7 - Símbolos e Aspectos do LDR (Eletronica Diaria 2014) ............................... 6 Figura 8 - Construção do LDR (Eletronica Diaria 2014) .............................................. 7 Figura 9- Curva referente ao valor de resistência de um LDR .................................... 8 Figura 10 - Motor de Corrente Contínua (clickplus 2014) ............................................ 8 Figura 11 - Esquema Motor de Corrente Contínua (SENAI 2014)...............................9 Figura 12- Veículo seguidor de Trilha em construção ............................................... 10 Figura 13- Gráfico dos Valores de resistores.............................................................10 Figura 14- Gráfico dos Valores de resistores.............................................................12 Figura 15- Circuito final para funcionamento do veículo............................................12 Figura 16- Foto circuito final.......................................................................................14 Figura 17- Foto circuito final.......................................................................................14 vii LISTA DE ABREVIATURAS E SÍMBOLOS AMP-OP- Amplificador Operacional. VCC- Fonte de alimentação positiva. VEE- Fonte de alimentação negativa. Vi- Fonte de alimentação nomeada “i”. R- Resistor. GND- Ground (terra). LDR- Resistor dependente da luz. viii RESUMO Este trabalho apresenta um veículo seguidor de trilha, veículo utilizado em algumas empresas para locomover peças ou ferramentas, para áreas distantes na qual, o colaborador não tem tempo de ir até o local pegar o material necessário, pois irá acarretar uma perda de produção, por isso, resolveu-se elaborar um veículo no mesmo molde do que foi apresentado acima. Para a elaboração do projeto foi necessário a realização de vários cálculos, estes cálculos incluíam a resistência para cada resistor, pois era preciso dimensionar a tensão que chegaria a cada parte do circuito, da quantia de luz absorvidas pelos LDR’s, entre outros, já na parte pratica levou um tempo razoavelmente baixo para a montagem. Foi escolhido o carrinho de brinquedo como base do projeto por ser simples, de baixo custo, prático e de fácil manuseio. O controle é realizado de forma analógica, através de amplificadores operacionais. Para determinar os ganhos necessários foram utilizadas curvas de resistências versus iluminancia obtidas em ensaios de laboratório. O princípio de funcionamento deste veículo baseia se que quando os LDR’s estão sobre a parte branca do trajeto a sua resistência fica muito baixa fazendo com que os motores liguem e façam o carrinho andar, já o se um ou os dois resistores dependentes de luz (LDR) fica sobre a faixa preta do trajeto, ele desliga o motor a qual está encarregado, pois, quanto mais escuro o trajeto mais alto sua resistência chega, assim sendo, não chega alimentação ao motor. ix 1. INTRODUÇÃO Os robôs seguidores de trilha possuem como característica principal a capacidade de percorrer o caminho determinado por uma linha traçada sobre uma superfície, não sendo necessária nenhuma interação humana ou qualquer tipo de controle que não seja o próprio sistema do robô. Eles normalmente são utilizados em competições, trabalhos escolares, e também nos conceitos industriais, para que possam executar tarefas de transporte como de ferramentas, peças de produção. Um exemplo é a Olimpíada Brasileira de Robótica, onde os alunos do ensino fundamental, médio e técnico tem a oportunidade de testar suas habilidades construindo um robô segue trilha e que execute várias ações (Olímpiada Brasileira de Robótica, 2014). Outro exemplo é o da figura 1, onde os estagiários da empresa Volkswagen projetaram um veículo para transporte e abastecimento de peças dentro da fábrica. Figura 1 - veículo seguidor de faixa (Volkswagen, 2014) Os veículos são projetados de forma que consigam se locomover sobre uma linha de cor preta em um fundo de cor oposta. Os sistemas de detecção contam com o uso de sensores para detectar o sinal que se reflete na superfície branca. (Volkswagen 2014). O robô do projeto em questão conta com dois resistores dependentes de luz, 1 (Light Dependent Resistors – LDR) que aumentam o valor de sua resistência na falta de luz. Conta também com um circuito de controle que, conforme essa resistência aciona um dos motores. Cada motor é responsável pela locomoção de um dos lados do robô. Por exemplo, quando um dos LDR está sobre a faixa de cor preta, ele aumenta o valor da resistência, que é detectado pelo circuito de controle que, por sua vez, desliga o motor. Enquanto isso, a luz do LED reflete sobre a superfície branca no segundo LDR que diminui seu valor de resistência, sendo também detectada pelo circuito de controle, que por sua vez, faz o segundo motor ligar e ajusta o robô de volta à trilha. A elaboração desse projeto foi possível com base nos conhecimentos adquiridos nas disciplinas de eletrônica analógica, máquinas elétricas, robótica, controle de processo. 2 2. OBJETIVO Desenvolver um veículo que se movimente sobre uma trilha preta em uma superfície plana, com auxilio de motores de corrente contínua e de dispositivos eletrônicos analógicos. 3 3. REVISÃO BIBLIOGRÁFICA. 3.1 Amplificadores Operacionais. Um amplificador operacional, ou um amp-op, é um amplificador diferencial que possui alta impedância de entrada, baixa impedância de saída e um ganho muito alto. (Boylestad 2012). A figura 2 mostra o símbolo esquemático para um amp-op. Ele possui uma entrada inversora, outra não inversora, duas entradas para alimentação +VCC e – VEE e uma saída (OUT)com terminação simples. (Malvino 2011) Figura 2 – Amp-Op IDEAL (Malvino 2011) Isso quer dizer que a entrada positiva produz uma saída que está em fase com o sinal aplicado, enquanto um sinal de entrada negativa resulta em uma saída com polaridade oposta. (Boylestad 2012). O circuito básico que utiliza um amp-op opera como um amplificador inversor, conforme mostra a Figura 3. Neste caso, o sinal de entrada Vi é aplicado através do resistor R1 à entrada inversora, sendo a saída conectada de volta à mesma entrada inversora através do resistor Rf. A entrada positiva é conectada ao potencial de referência. Como o sinal Vi é aplicado à entrada inversora, a saída resultante é oposta em fase ao sinal de entrada. (Boylestad 2012). . Rf Vi + R1 Vo Figura 3 - Multiplicador inversor de ganho constante Sendo o ganho de tensão obtido através da relação entre -Rf e R1, ou seja: 𝑅𝑓 𝑉𝑜 =𝐾=− 𝑉𝑖 𝑅1 4 (1) Neste projeto foram utilizados quatro amplificadores LM741, que é um amp-op de uso largamente utilizado. A figura 4 mostra como é realizada sua configuração: Figura 4 - Estilo de encapsulamento do 741 e pinagem (Malvino 2011) O primeiro está sendo utilizado como amplificador inversor, que, como já citado anteriormente, utiliza a realimentação negativa para estabilizar seu ganho de tensão. O segundo amplificador foi utilizado no modo comparador, cujo esquema é mostrado na Figura 6. Neste modo, o amplificador realiza a comparação de uma tensão de entrada com uma tensão de referência. (Saber Eletronica 2013). Sua tensão de saída é dada por: 𝑉𝑜 =𝐾 𝑉𝑖 (2) Permanecendo então, da seguinte forma: Figura 5- Circuito formato Somador Inversor Sendo que para realização de testes, no lugar do Rf, e do LDR foi utilizado um potenciômetro. 5 3.2 LDR Light Dependent Resistors, Resistor Dependente de Luz ou Fotoresistência é um componente eletrônico passivo do tipo resistor variável, mais especificamente, é um resistor cuja resistência varia conforme a intensidade da luz que incide sobre ele. Tipicamente, à medida que a intensidade da luz aumenta a sua resistência diminui. O LDR é construído a partir de material semicondutor com elevada resistência elétrica. Quando a luz que incide sobre o semicondutor tem uma frequência suficiente, os fótons que incidem sobre ele libertam elétrons para a banda condutora que irão melhorar a sua condutividade e assim diminuir a resistência. Um multímetro pode ser usado para encontrar a resistência na escuridão ou na presença de luz intensa. Os resultados típicos para um LDR poderão ser: Escuridão: resistência máxima, geralmente acima de 1M ohms. Luz muito brilhante: resistência mínima, aproximadamente 100 ohm. Dependendo do tipo, um LDR pode ser sensível às faixas de luz: Infravermelhos (IR), Luz visível ou Ultravioleta (UV). (Wikipédia 2013) 3.2.1 Utilização do LDR Numa utilização normal, o LDR é montado num circuito onde a resistência é convertida para tensão. A forma mais simples de fazê-lo é através de um circuito divisor de tensão. O LDR é muito utilizado em circuitos eletronicos onde é utilizado um sensor de luz devido ao seu baixo custo e facilidade de utilização. Por este motivo pode ser facilmente encontrado nas chamadas fotocélulas, medidores de luz, detectores de incêndio ou de fumo, controladores de iluminação, controle automático de porta, alarme contra ladrão, contagem industrial, etc. Na figura 7 temos o símbolo usado para representar um LDR e os aspectos mais comuns com que podem ser encontrados esses componentes. (Wikipédia 2013) Figura 6 - Símbolos e Aspectos do LDR (Eletronica Diaria, 2014) 6 3.2.2 Construção do LDR Na construção de um LDR, conforme mostra a figura 8, são utilizados dois eletrodos em forma de “pente” que se entrelaçam, obtendo-se com isso uma grande superfície de contato com o material fotossensível. (Wikipédia 2013) Figura 9 - Construção do LDR (Eletronica Diaria 2014) Com a utilização de um multímetro, um LDR e um medidor de luz, foram realizados testes, variando-se a iluminância do laboratório, que resultam nos valores contidos na tabela: Tabela 1- Valores de resistência em função da luminosidade Iluminância lux 205 105 90 72 60 54 31 13 5 1 em Resistência kΩ 2,38 4,5 4,73 5,17 5,22 6,23 13 15,25 31,48 327 em A partir dos dados da Tabela 1, foi obtida a Figura , onde é mostrada a relação entre a resistência a iluminância1. 1 Iluminância é uma grandeza de luminosidade que faz a relação entre o fluxo luminoso que incide na direção perpendicular a uma superfície e a sua área. Na prática, é a quantidade de luz dentro de um ambiente. (Iluminamento 2014) 7 Figura 10- Curva referente ao valor de resistência de um LDR 3.3 Motores de Corrente Contínua Motor de corrente continua é uma maquina capaz de converter energia elétrica em mecânica. A principal característica desses motores é a facilidade de controle da velocidade e o desenvolvimento de torque de partida elevado. (SENAI 2014) Figura 11 - Motor de Corrente Contínua (clickplus 2014) 8 3.3.1 Funcionamento do Motor Na maioria dos motores elétricos CC, o rotor é um eletroímã que gira entre os polos de ímãs permanentes estacionários. Para tornar esse eletroímã mais eficiente o rotor contém um núcleo de ferro, que se torna fortemente magnetizado, quando a corrente flui pela bobina. O rotor girará desde que essa corrente inverta seu sentido de percurso cada vez que seus polos alcançam os polos opostos do estator. (SENAI, 2004) Figura 12 - Esquema Motor de Corrente Contínua (SENAI 2014) 9 4. MÉTODOS e MATERIAIS 4.1 Métodos 4.2.1. Elaboração do veículo Foram comprados dois carinhos de brinquedo, cujo funcionamento depende de pilhas. Os veículos foram desmontados, separando-se as bases, os motores, e as rodas frontais. Em uma das bases, após a retirada das rodas, foi realizada a medição no local onde seriam inseridos os motores, realizando os ajustes necessários para anexar as rodas no eixo do motor. Permanecendo como mostra a Figura 13: Figura 13- Veículo seguidor de Trilha em construção 4.2.2. Escolha dos materiais Para realização deste projeto foram utilizados os seguintes materiais: dois motores de corrente contínua de carrinhos de brinquedo, dois LDR’s, quatro Amplificadores operacionais 741, dois LED’s, uma placa de fenolite, três pilhas recarregáveis, fonte geradora de tensão. Para a escolha dos valores dos resistores, foi necessária a realização de vários testes, tanto no programa Multisim, como no laboratório com protoboard. Observe a tabela 2: 10 Tabela 2- Valores para escolha de Resistores Valor de R0 (Ω) 180 220 270 330 390 470 560 680 820 1000 1200 1500 1800 2200 2700 3300 3900 4700 5600 6800 8200 10000 12000 15000 18000 Vi, máx. 4,997 4,997 4,996 4,995 4,994 4,993 4,991 4,990 4,987 4,985 4,982 4,977 4,973 4,967 4,959 4,950 4,941 4,929 4,916 4,898 4,878 4,852 4,823 4,781 4,739 Vi, min. 4,648 4,577 4,491 4,391 4,296 4,175 4,048 3,889 3,719 3,521 3,324 3,067 2,847 2,598 2,343 2,095 1,895 1,681 1,491 1,296 1,125 0,961 0,828 0,685 0,584 Neste caso, a escolha foi feita pelo valor de resistor (R0) que se aproximasse de 40%, que está em negrito na tabela. 11 Tensão de Entrada - Vi (V) Vi, min. Vi, máx. Resistência (Ω) Figura 14- Gráfico dos Valores de resistores Foi possível determinar os valores de resistência do LDR sobre a folha branca ou sobre uma listra negra. A resistência medida variou entre 70KΩ e 360KΩ, o que de acordo com o ensaio realizado corresponde há uma iluminância refletida de aproximadamente 0 lux, sobre a faixa negra, a mais de 200 lux sobre a superfície branca. Com o auxílio do protoboard foi realizada a montagem do circuito mostrado na Figura 15: Figura 15- Circuito final para funcionamento do veículo Foi possível observar através do osciloscópio a variação de tensão tanto na entrada, como na saída dos amp-ops e a saturação dos mesmos. 12 5. RESULTADOS E DISCUSSÕES Foram elaborados vários testes com componentes elétricos para a melhor performance do circuito eletrônico de controle de um carrinho seguidor de trilhas, sendo escolhidos com base em cálculos e disponibilidades dos mesmos. Assim sendo foram colocados dois motores elétricos em um carrinho de brinquedo como apresentado na figura 13, antes apresentada, para serem acionados através do circuito de controle, também já apresentado na figura 15. Na primeira etapa do projeto foram realizados vários testes para a elaboração da primeira parte do circuito para a obter a saída perfeita para a continuação do circuito, nesta primeira etapa calculou os valores de resistores e do LDR necessários para obtenção do resultado necessário, apresentado na figura 5. Figura 5- Circuito formato Somador Inversor Com a conclusão desta etapa foi construído a segunda parte do circuito calculando valor necessário do potenciômetro, resistores, leds, fontes de tensão, com isso o circuito ficou da seguinte maneira, figuras 16 e 17. 13 Figura 16- Foto circuito final Figura 17- Foto circuito final O funcionamento do circuito de controle foi perfeito quando o ldr é submetido a luz ele apaga o led, e quando o mesmo vae para o escuro acende o led. Mas não foi possível a interligação com os motores para o carrinho andar, por falta de um componente. Assim sendo o carrinho não anda mais o circuito funciona. 14 6. CONCLUSÃO Funcionamento do LDR em circuitos analógicos foi comprovado que é muito efetivo, operando como uma chave aberta em alguns circuitos quando a muita luz, ou chave fechada quando a pouca luz. Neste Circuito toda a parte destinada ao controle foi construída e calculada com sucesso, não deixando nada a desejar apenas, não foi realizado o chaveamento dos motores elétricos no carro, sendo assim, o carrinho não funcionou segundo o planejado. Talvez com um pouco mais de tempo tudo teria sido resolvido e o carrinho estaria funcionando perfeitamente, mas como um grande imprevisto passado pelo grupo o trabalho está bom. E com a elaboração deste trabalho adquirimos grande conhecimento na parte teórica e pratica. 15 7. REFERÊNCIAS BIBLIOGRÁFICAS Boylestad, Robert L. Dispositivos Eletrônicos e teoria de circuitos. São Paulo: PEARSON, 2012. clickplus. www.clickplus.pt/p44321. 10 de 04 de 2014. Eletronica Diaria . 10 de maio http://eletronicadiaria.blogspot.com.br/p/fotoresistor-ldr.html. de 2014. Malvino, Albert P. Eletrônica - Volume 2 - Sétima edição. Porto Alegre: AMGH Editora Ltda., 2011. Olímpiada Brasileira de Robótica. 2014. http://www.obr.org.br/ (acesso em 11 de abrilde 2014). Saber Eletronica. 27 de agosto 2013.http://www.sabereletronica.com.br/artigos/1464-aplicaes-paracomparadore de-tenso (acesso em 05 de maio de 2014). Volkswagen. 2014. http://www.vw.com.br/blogvolkswagen/post/2012/09/03/AGVEstagio.aspx (acesso em 11 de abril de 2014). SENAI 2014, Apostila de Esquema de Motor de Corrente Continua. 16 de
Baixar