X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil SÍNTESE DE COMPENSADOR DINÂMICO DE SAÍDA PARA SISTEMAS CONTROLADOS VIA REDE Vitor M. Moraes∗, Eugênio B. Castelan∗, Ubirajara F. Moreno∗ ∗ Grupo de Controle de Sitemas Mecatrônicos - GSM, Departamento de Automação e Sistemas - DAS Universidade Federal de Santa Catarina - UFSC Florianópolis, SC, Brasil Emails: [email protected], [email protected], [email protected] Abstract— This paper presents a method for synthesis of dynamic output-feedback controller partially depended on parameter for networked control systems. The results are described in terms of linear matrix inequalities based in a polytopic model for the system. Moreover, a restriction related with temporal performance for the closed-loop system is included in the stability condition. A numerical example and simulation are provided in order to illustrate the proposed method. Keywords— networked control systems, linear matrix inequalities, output dynamic compensator. Resumo— Este artigo apresenta uma proposta para sı́ntese de compensador dinâmico, parcialmente dependente de parâmetro, para sistemas controlados via rede. Os resultados são desenvolvidos em termos de desigualdades matriciais lineares, considerando para isso um modelo politópico para o sistema de controle. Adicionalmente, uma restrição temporal, relacionada ao desempenho do sistema em malha fechada, é acrescentada à condição de estabilidade. O método proposto é ilustrado a partir de um exemplo com resultados numéricos e simulação. Palavras-chave— saı́da. 1 sistemas de controle via rede, desigualdades matriciais lineares, compensador dinâmico de Introdução Sistemas controlados através de redes de comunicação (NCS, do inglês Networked Control Systems) podem ter o desempenho prejudicado devido aos atrasos ocorridos durante a troca de informações entre os componentes do sistema de controle. Usualmente, o compartilhamento do meio de transmissão faz com que estes atrasos sejam variantes no tempo, tornando difı́ceis a análise e o projeto de controladores que garantam a estabilidade e desempenho desejados ao processo. A crescente utilização deste tipo de sistema nas mais diversas áreas, tem proporcionado um correspondente avanço em pesquisas relacionadas ao tema (Baillieul and Antsaklis, 2007; Ge et al., 2007; Hespanha et al., 2007; Tang and Yu, 2007). Algumas aplicações tı́picas envolvem, por exemplo: robótica móvel, circuitos automotivos, processos industriais, automação residencial, cirurgia remota, entre outras. Na literatura podem ser encontradas várias propostas referentes à sı́ntese de controladores para esta classe de sistemas. A maioria desses estudos utilizam a teoria de Lyapunov como base para a definição das condições de estabilidade (Hetel et al., 2007; Izák et al., 2009; Yue et al., 2004; Cloosterman et al., 2010; Zhang and Yu, 2008; Dan et al., 2008; Gao et al., 2008), complementarmente utilizando técnicas de controle robusto para a modelagem do sistema, por exemplo, sistemas politópicos e sistemas limitados por norma. Existem, também, trabalhos que fazem uso de uma abordagem com base em funções de transferência (Santos et al., 2007; Kao and ISSN: 2175-8905 - Vol. X Lincoln, 2004; Cervin et al., 2004), por vezes utilizando o conceito de margem de jitter para o desenvolvimento do trabalho. No entanto, grande parte dos resultados são demonstrados para aplicação em controles por realimentação de estados, o que na prática nem sempre é viável. Desse modo, dando sequência ao estudo apresentado em Moraes et al. (2010) e motivado pelo trabalho de Castelan et al. (2010), no presente artigo é proposto um método para cálculo de um compensador dinâmico de saı́da para sistemas controlados via rede. Do mesmo modo que no trabalho anterior, é considerada a utilização de estampas de tempo, proporcionando ao controlador informações temporais relacionadas aos instantes de ocorrência dos eventos do sistema de controle. Isto possibilita, por exemplo, o cálculo de um compensador parcialmente dependente de parâmetro. Os resultados são descritos em termos de LMIs (Boyd et al., 1994). O texto está organizado da seguinte forma: na seção 2 são descritas as caracterı́sticas do sistema e seu respectivo modelo. Na seção 3 são mostrados alguns conceitos preliminares, usados como base na seção 4 para o cálculo de um compensador dinâmico de saı́da. Na seção 5 os resultados numéricos e simulados obtidos para um exemplo são apresentados. Notações: A′ corresponde à matriz transposta de A. I denota uma matriz identidade de dimensão apropriada. A > B significa que A − B é simétrica positiva definida. ∗ refere-se à blocos simétricos. (•) representa um elemento da matriz que não tem influência para o desenvolvimento. [ 0] diag(A, B) é uma matriz bloco diagonal A 0 B . 516 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil 2 2.1 Formulação do Problema Sistema de Controle via Rede No decorrer deste trabalho é considerado um sistema cuja topologia básica pode ser vista na figura 1, onde as setas indicam o sentido da troca de informações entre os componentes do sistema de controle. Figura 1: Sistema de Controle via Rede. 2.2 Para este sistema, admite-se que o processo é linear e invariante no tempo (LTI) e sua dinâmica pode ser descrita por equações no espaço de estados: ẋ(t) = M x(t) + N u(t) y(t) = Cx(t) (1) com x(t) ∈ ℜn , u(t) ∈ ℜm , y(t) ∈ ℜp , M ∈ ℜn×n , N ∈ ℜn×m e C ∈ ℜp×n . Os sensor é regido a tempo, ou seja, realiza a leitura das saı́das do sistema a cada intervalo de tempo T , enviando ao controlador as informações amostradas. O atuador é regido a evento e funciona como um segurador de ordem zero, atualizando o valor do sinal de controle sempre que uma nova informação proveniente do controlador é recebida. O controlador também é regido a evento, enviando ao atuador um novo valor do sinal de controle sempre que recebe uma mensagem do sensor (Moraes, 2010). Considera-se ainda a utilização de protocolos deterministas para a comunicação, o que possibilita um correto escalonamento dos processos que acessam a rede de modo a garantir o cumprimento de todos os deadlines. Ainda assim, a utilização de uma rede de comunicação, para troca de informações entre os componentes do sistema de controle, implica em um atraso τ entre os instantes de medição e atuação, podendo ocasionar perda de desempenho do sistema em malha fechada. Este atraso é composto de duas parcelas, τ = τsc + τca , sendo a primeira, τsc , referente ao tempo gasto no envio da mensagem do sensor para o controlador, e a segunda, τca , referente ao tempo gasto para envio da mensagem do controlador ao atuador. É importante ressaltar que, eventualmente, a rede pode estar ocupada no momento em que algum componente tente acessá-la, provocando um ISSN: 2175-8905 - Vol. X tempo de espera. Esta espera pode ser variante no tempo, portanto seu efeito deve ser acrescentado aos valores correspondentes das parcelas do atraso. Apesar disso, devido às caracterı́sticas inerentes às redes determinı́sticas e protocolos de comunicação correspondentes, o atraso é limitado. Assim, assumindo um deadline máximo igual ao perı́odo de amostragem, tem-se 0 < τmin ≤ τ ≤ τmax ≤ T . Outra caracterı́stica considerada é a utilização de mensagens contendo estampas de tempo, possibilitando o cálculo de um sinal de controle dependente do parâmetro τ (ou de um valor estimado de τ como em (Hetel et al., 2011)). Desse modo, de acordo com as caracterı́sticas apresentadas para o sistema, o problema consiste na sı́ntese de compensador dinâmico, possivelmente parcialmente dependente do parâmetro τ , que garanta a estabilidade e um certo grau de desempenho temporal para o sistema em malha fechada. Representação Politópica Para representar o sistema (1) em tempo discreto, com relação aos instantes de amostragem, deve-se considerar o efeito ocasionado pelo atraso τ no valor do sinal de controle aplicado durante o intervalo de tempo t ∈ [kT, (k + 1)T ], isto é: { [ ] uk−1 , t ∈ kT, kT + τk [ ] u(t) = (2) uk , t ∈ kT + τk , (k + 1)T o que implica na seguinte representação (Åström and Wittenmark, 1997): xk+1 = Axk + Γ1 uk−1 + Γ0 uk yk = Cxk (3) onde A = eM T ∫ T −τk Γ0 = eM s ds N 0 ∫ Γ1 = T T −τk eM s ds N = B − Γ0 ∫T com B = 0 eM s ds N . Γ0 e Γ1 correspondem às incertezas exponenciais, dependentes do atraso τk . Fazendo uso da teoria de conjuntos convexos, as matrizes incertas do sistema (3) podem ser expressas em uma forma politópica adicionada de uma incerteza limitada por norma (Hetel et al., 2007) 1 : Γ0 (τk ) = h+1 ∑ µi (τk )Γh0i + ∆Γ0 (τk ) i=1 1 Apenas os cálculos referentes à matriz incerta Γ0 são mostrados; as equações correspondentes à Γ1 podem ser deduzidas a partir da relação Γ1 = B − Γ0 . 517 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil ] [ h−1 onde Γh0i = Mh! ϕi N , para i = ··· M I 2! 1, . . . , h + 1, e: h h h α I α I α I .. .. .. ϕ1 = . ϕ2 = . · · · ϕh+1 = . αI αI 3 Considere o sistema em malha fechada (5) e uma função candidata de Lyapunov dependente de parâmetro: αI com α = T − τmax e α = T − τmin . Os valores de ponderação µi (τk ) correspondem à solução para o sistema linear: 1 1 ··· 1 1 1 µ 1k α αk α · · · α α 2 µ2k 2 α α2 · · · α2 α2 .. = αk .. .. . . . .. . .. . . . .. . . µ(h+1)k h h h h αkh α α α ··· α onde αk = T − τk . O termo ∆Γ0 (τk ) representa uma incerteza residual e pode ser tratado como uma restrição por norma (Garcia et al., 1994): ∆Γ0 (τk ) ≤ γ02 . V (zk , τk ) = zk′ Q−1 (τk )zk Sistema em Malha Fechada Como extensão do estudo apresentado em Moraes et al. (2010), para o presente trabalho considera-se o compensador dinâmico de saı́da parcialmente dependente do parâmetro τk : ζk+1 = Ac (τk )ζk + Bc yk + F1 (τk )uk−1 + F0 (τk )uk uk+1 = Cc ζk + Dc yk + K1 uk−1 + K0 uk (4) onde [Ac (τk ) F1 (τk ) F0 (τk )] = h+1 ∑ µi (τk )[Aci F1i F0i ] i=1 Definindo, então, uma variável de estado auxiliar xk tal que xk = xk − Buk , com B ∈ ℜn×m , e um vetor de estados aumentado zk = [x′k ζk′ u′k−1 u′k ]′ ∈ ℜl , l = 2(n + m), uma representação do sistema em malha fechada é dada por: zk+1 = H(τk )zk + E∆(τk )Dzk (5) ∑h+1 onde H(τk ) = i=1 µi (τk )Hi . As matrizes Hi são dadas por: A + BDc C Bc C Hi = 0 Dc C BCc Aci 0 Cc Γ1i + BK1 F1i 0 K1 Ω F0i − Bc CB I K0 − Dc CB com Ω = Γ0i + BK0 − (A + BDc C)B, I [ ] 0 0 0 I 0 E = , D = , 0 0 0 0 I 0 e ∆(τk ) = [∆Γ1 (τk ) ∆Γ0 (τk )] uma matriz que contém as incertezas limitadas por norma, e portanto: ∆(τk ) ≤ γ 2 (6) ISSN: 2175-8905 - Vol. X (7) ∑h+1 com Q(τk ) = i=1 µi (τk )Qi , Qi = Q′i > 0. Por definição, o sistema em malha fechada é robustamente assintóticamente estável, com um coeficiente de contração λ ∈ (0, 1], se: ∆V (zk , τk ) = V (zk+1 , τk+1 )−λV (zk , τk ) < 0 (8) ∀zk ∈ ℜl , zk ̸= 0, e ∀τk ∈ [τmin , τmax ]. Esta condição aplicada ao sistema (5), resulta em2 : ( )′ ( ) H + E∆D (Q+ )−1 H + E∆D − λQ−1 < 0 (9) 3.1 2.3 Resultados Preliminares Condição de Estabilidade Lema 1 Seja λ ∈ (0, 1] e γ que verifique (6). O sistema em malha fechada (5) é robustamente assintóticamente estável, com um coeficiente de contração λ, se existem matrizes simétricas positivas definidas Qi ∈ ℜl×l , matrizes U ∈ ℜl×l e R ∈ ℜn×n , e um escalar σ > 0 que verificam: −Qj U ′ Hi′ 0 γR′ E ′ Hi U λ(Qi − U − U ′ ) DU 0 0 U ′ D′ −σI 0 γER 0 <0 0 ′ σI − R − R (10) onde i, j = 1, ..., h + 1. Prova: Realizando a combinação convexa para os termos indicados pelos ı́ndices i e em seguida para j, sabendo que (σI − R′ )σ −1 I(σI − R) ≥ 0, e aplicando o complemento de Schur, a equação (10) implica na desigualdade dependente do parâmetro τ: −Q+ + σγ 2 EE ′ HU 0 U ′ H′ λ(Q − U − U ′ ) U ′ D′ < 0 0 DU −σI Aplicando novamente o complemento de Schur: [ −Q+ + σγ 2 EE ′ U ′ H′ ] HU <0 λ(Q − U − U ′ ) + σ −1 U ′ D′ DU Esta notação pode ser reescrita da forma seguinte: [ ] −Q+ HU + ′ ′ ′ U H λ(Q − U − U ) [ ] [ ] ] [ γE [ ′ 0 γE 0 + σ −1 0 σ ′ ′ 0 U D ] DU < 0 (11) 2 Por simplicidade de notação os termos (τ ) serão omik tidos nas próximas equações e os termos (τk+1 ) serão substituı́dos pelo ı́ndice + . 518 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil Assim, levando em consideração que ∆′ ∆ ≤ γ 2 , a equação (11) é equivalente à (Wu et al., 2009): [ −Q U ′ H′ + ] HU + λ(Q − U − U ′ ) ([ ] γE −1 [ He γ ∆ 0 0 DU ) ] <0 que corresponde à: [ ] (H + E∆D)U <0 λ(Q − U − U ′ ) −Q+ ′ U (H + E∆D)′ (12) Sabendo que (Q − U ′ )Q−1 (Q − U ) ≥ 0, a equação (12) implica em: [ −Q+ (H + E∆D)′ ] (H + E∆D) <0 −λQ−1 2 que é equivalente à equação (9). 4 Sı́ntese do Compensador Dinâmico de Saı́da Motivado pelo trabalho de Castelan et al. (2010), para o cálculo do compensador dinâmico considerado, são definidas matrizes U e U −1 tais que: X Z U = Π1 Π3 N (•) (•) (•) 0 0 I 0 0 Y 0 W , U −1 = Σ1 0 I Σ3 M 0 (•) 0 (•) I (•) 0 0 0 0 I de onde segue que: XY + N W = I. de modo que: X Z Π1 Π3 0 0 I 0 ′ 0 Y I 0 ′ , Θ UΘ = 0 0 I 0 T′ X Π1 Π3 Σ′1 0 I 0 Σ′3 0 0 I com T ′ = Y ′ X + W ′ Z + Σ′1 Π1 + Σ′3 Π3 . é tal que o sistema em malha fechada (5) é robustamente assintóticamente estável. Prova: Pré- e pós- multiplicando (10) por diag{Θ′ , Θ′ , I, I} e sua transposta, respectivamente, fazendo R = ηI e definindo variáveis auxiliares: D̂ = Dc Ĉ = Cc Z + K1 Π1 + (K0 − Dc CB)Π3 + Dc CX B̂ = Y ′ BDc + W ′ Bc + Σ′3 Dc F̂1i = W ′ F1i + Y ′ (Γ1i + BK1 ) + Σ′3 K1 ′ ′ ′ F̂0i = Σ1 + W (F0i − Bc CB) + Σ3 (K0 − Dc CB) +Y ′ (Γ0i + BK0 (A + BDc C)B) Âi = F̂0i Π3 + F̂1i Π1 + (W ′ Aci + Σ′3 Cc + Y ′ BCc )Z ( ) + Y ′ (A + BDc C) + W ′ Bc C + Σ′3 Dc C X a equação definida pelo Lema 1 é equivalente à equação (15). 2 5 Exemplo e Simulação Considere um sistema composto de um duplo integrador: [ ] [ ] [ ] 0 1 0 M= , N= , C= 1 0 . 0 0 1 O perı́odo de amostragem considerado é T = 0, 1s e o atraso variante é limitado por τmin = 0, 001s e τmax = T . Na tabela 1 são mostrados os menores valores obtidos para o coeficiente de contração λ, considerando dois valores distintos para a ordem de aproximação, h, no cálculo do modelo politópico: para cada um dos modelos politópicos, considerou-se três valores diferentes para o parâmetro η; para cada um desses valores realizou-se uma busca linear pelo menor valor de λ para o qual as LMIs (15) obtiveram resultado factı́vel. Tabela 1: Valores numéricos mı́nimos obtidos para o coeficiente de contração λ. h=1 h=2 h=3 η=1 0, 9877 0, 9786 0, 9786 η = 25 0, 8772 0, 8190 0, 8189 η = 50 0, 8886 0, 8149 0, 8148 (14) Lema 2 Seja λ ∈ (0, 1], η > 0 e γ que verifique (6). Se existem matrizes Q̂i , Y , X, T , Σ1 , Σ3 , Π1 , Π3 , Âci , B̂, F̂1i , F̂0i , Ĉ, D̂, K1 , K0 e um ISSN: 2175-8905 - Vol. X Dc = D̂ Cc = (Ĉ − K1 Π1 − (K0 − Dc CB)Π3 − Dc CX)Z −1 Bc = (W ′ )−1 (B̂ − Y ′ BDc − Σ′3 Dc ) F = (W ′ )−1 (F̂1i − Y ′ (Γ1i + BK1 ) − Σ′3 K1 ) 1i F0i = Bc CB + (W ′ )−1 (F̂0i − Σ′1 − Σ′3 (K0 − Dc CB) −Y ′ (Γ0i ( + BK0 − (A + BDc C)B) Aci = (W ′ )−1 (Âi − F̂0i Π3 − F̂1i Π1 ( ) − Y ′ (A + BDc C) + W ′ Bc C + Σ′3 Dc C X)Z −1 ) −Σ′3 Cc − Y ′ BCc (13) Define-se também uma matriz auxiliar Θ: Y I 0 0 W 0 0 0 Θ= Σ1 0 I 0 Σ3 0 0 I I 0 UΘ = 0 0 escalar σ > 0 que verifiquem (15), então o controlador (4) com 519 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil −Q̂12j −Q̂22j ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ... ... ... ... ... ... ... ... ... ... ... −Q̂13j −Q̂23j −Q̂33j ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ −Q̂14j −Q̂24j −Q̂34j −Q̂44j ∗ ∗ ∗ ∗ ∗ ∗ ∗ F̂1i Γ1i + BK1 0 K1 λ(Q̂13i − Σ′1 ) λ(Q̂23i − Π′1 ) λ(Q̂33i − 2I) ∗ ∗ ∗ ∗ Y ′ A + B̂C A + B D̂C 0 D̂C λ(Q̂11i − Y ′ − Y ) ∗ ∗ ∗ ∗ ∗ ∗ Âi ... AX + B Ĉ + Γ1i Π1 + (Γ0i − AB)Π3 ... Π3 ... Ĉ ... λ(Q̂12i − T ′ − I) ... λ(Q̂22i − X − X ′ ) ... ∗ ... ∗ ... ∗ ... ∗ ... ∗ ... F̂0i 0 0 γηY ′ Γ0i + BK0 − (A + B D̂C)B 0 0 I I 0 0 0 K0 − D̂CB 0 0 0 ′ λ(Q̂14i − Σ3 ) 0 0 0 < 0, ∀i, j = 1, ..., h + 1 λ(Q̂24i − Π′3 ) Π′1 Π′3 0 λ(Q̂34i ) I 0 0 λ(Q̂44i − 2I) 0 I 0 ∗ −σI 0 0 ∗ ∗ −σI 0 ∗ ∗ ∗ σI − 2ηI Observa-se que, para cada situação, maiores valores na ordem de aproximação permitem melhorar os resultados obtidos para o coeficiente de contração. No entanto, salienta-se que, no exemplo utilizado, valores de h > 2 não implicaram em melhoras significativas, quando ocorreram. Também é válido ressaltar que quanto maior h, maior a quantidade de vértices do sistema politópico, consequentemente a complexidade numérica na resolução das LMIs e no cálculo realizado pelo controlador também aumentam. Para as simulações foram consideradas duas ordens de aproximação para o sistema politópico, h = 1 e h = 2, com η = 25 e λ = 0, 9 em ambos os casos. As matrizes do compensador dinâmico para cada situação são mostradas na tabela 2. (15) 2 x1 (t) −Q̂11j ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ h=1 h=2 1 0 -1 0 1 2 3 4 5 tempo, [s] 6 7 8 9 10 0 1 2 3 4 5 tempo, [s] 6 7 8 9 10 1 x2 (t) 0 -1 -2 Figura 2: Dinâmica dos estados do sistema. 2 1 0 -1 -2 u(t) -3 -4 -5 O atraso variável foi gerado como uma distribuição uniforme, onde os limites utilizados correspondem aos valores mı́nimo e máximo possı́veis, τmin e τmax , respectivamente. Ressalta-se que a mesma sequência de atrasos foi utilizada para os dois casos simulados. Na figura 2 são mostrados os comportamentos dos estados do sistema, para uma condição inicial x0 = [1, 7 − 0, 3]′ . Por fim, na figura 3 é mostrada uma comparação entre os sinais de controle gerados por cada um dos controladores considerados. Como pode ser visto nos gráficos apresentados, os comportamentos dinâmicos nos dois casos são distintos, embora próximos. A maior diferença pode ser observada na amplitude do sinal de controle para cada situação. Os resultados apresentados nesta seção foram obtidos com o auxı́lio das ferramentas computacionais: Yalmip (Löfberg, 2004), Sedumi (Sturm, 1999) e True-time (Cervin et al., 2003). ISSN: 2175-8905 - Vol. X -6 h=1 h=2 -7 -8 0 1 2 3 4 5 6 7 8 9 10 tempo, [s] Figura 3: Sinal de controle. 6 Conclusão Neste artigo foi apresentado um estudo sobre a estabilidade em sistemas controlados via rede, sendo proposta uma metodologia para cálculo de um compensador dinâmico de saı́da parcialmente dependente de parâmetro. Os cálculos deste compensador são descritos em termos de desigualdades matricias lineares, e a validade ilustrada a partir de um exemplo com resultados numéricos e simulação. Agradecimentos Os autores agradecem à CAPES e ao CNPq pelo auxı́lio financeiro fornecido. 520 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil Tabela 2: Resultados numéricos obtidos para η = 25 e λ = 0, 9. [ Aci Bc F1i F0i Cc h = 1, (i = 1, 2) ] [ ] −0, 0319 0, 0297 −0, 0320 0, 0337 , −0, 4832 0, 4862 −0, 4833 0, 4888 [ ] −52, 8339 −26, 3751 [ ] [ ] 0, 0527 −0, 1288 , −1, 9158 0, 7877 [ ] [ ] 0, 1060 0, 2529 , 3, 3116 0, 5873 [ ] −0, 0806 0, 0841 [ 0, 6010 0, 5627 h = 2, (i = 1, 2, 3) [ ] [ −0, 0568 0, 6009 −0, 0590 0, 6009 , , −0, 0564 0, 5628 −0, 0557 0, 5628 [ ] 13, 1569 −22, 2940 [ ] [ ] [ ] −2, 1675 0, 7063 0, 5938 , , −1, 8684 0, 5063 0, 5705 [ ] [ ] [ ] 3, 4198 0, 5684 0, 6814 , , 3, 1045 0, 7288 0, 6622 [ ] 0, 0750 0, 0017 ] Dc −4, 1624 −2, 7276 K1 −0, 1006 −0, 0837 K0 −0, 0640 −0, 0860 Referências Baillieul, J. and Antsaklis, P. (2007). Control and communication challenges in networked real-time systems, Proceedings of the IEEE 95(1): 9. Boyd, S., El Ghaoui, L., Feron, E. and Balakrishnan, V. (1994). Linear Matrix Inequalities in System and Control Theory, Society for Industrial and Applied Mathematics, Philadelphia, USA. Castelan, E., Leite, V., Miranda, M. and Moraes, V. (2010). Synthesis of output feedback controllers for a class of nonlinear parameter-varying discrete-time systems subject to actuators limitations, American Control Conference (ACC), 2010, IEEE, Baltimore, USA, pp. 4235–4240. Cervin, A., Henriksson, D., Lincoln, B., Eker, J. E. and Årzén, K.-E. (2003). How Does Control Timing Affect Performance? Analysis and Simulation of Timing Using Jitterbug and TrueTime, IEEE Control Systems Magazine 23(3): 16–30. Cervin, A., Lincoln, B., Eker, J., Årzén, K.-E. and Buttazzo, G. (2004). The jitter margin and its application in the design of real-time control systems, Proceedings of the 10th International Conference on Real-Time and Embedded Computing Systems and Applications. Cloosterman, M., Hetel, L., van de Wouw, N., Heemels, W., Daafouz, J. and Nijmeijer, H. (2010). Controller synthesis for networked control systems, Automatica 46(10): 1584–1594. Dan, M., Dimirovski, G., Tao, L. and Jun, Z. (2008). Robust exponential stabilization of switched systems with network time-varying delays and packet dropout, Control Conference, CCC 2008. 27th Chinese, IEEE, pp. 96–100. Gao, J., Su, H., Ji, X. and Chu, J. (2008). Robust stabilization for a class of nonlinear networked control systems, Journal of Control Theory and Applications 6(3): 300–304. Garcia, G., Bernussou, J. and Arzelier, D. (1994). Robust stabilization of discrete-time linear systems with norm-bounded time varying uncertainty, Systems & Control Letters 22(5): 327–339. Ge, Y., Tian, L. and Liu, Z. (2007). Survey on the stability of networked control systems, Journal of Control Theory and Applications 5(4): 374–379. Hespanha, J., Naghshtabrizi, P. and Xu, Y. (2007). A survey of recent results in networked control systems, Proceedings of the IEEE 95(1): 138–162. Hetel, L., Daafouz, J. and Iung, C. (2007). LMI control design for a class of exponential uncertain systems with application to network controlled switched systems, American Control Conference pp. 1401–1406. ISSN: 2175-8905 - Vol. X ] −0, 0589 −0, 0553 Hetel, L., Daafouz, J., Richard, J. and Jungers, M. (2011). Delay-dependent sampled-data control based on delay estimates, Systems & Control Letters 60(2): 146–150. Izák, M., Görges, D. and Liu, S. (2009). Stabilization of systems with variable and uncertain sampling period and time delay, Nonlinear Analysis: Hybrid Systems 4(2): 291–305. Kao, C. and Lincoln, B. (2004). Simple stability criteria for systems with time-varying delays, Automatica 40(8): 1429–1434. Löfberg, J. (2004). YALMIP: A Toolbox for Modeling and Optimization in MATLAB, Proceedings of the CACSD Conference, Taipei, Taiwan. Moraes, V. (2010). Uma Proposta para Sı́ntese de Controlador para uma Classe de Sistemas de Controle via Rede, Dissertação de Mestrado, Departamento de Automação e Sistemas, Universidade Federal de Santa Catarina, Florianópolis, Brasil. Moraes, V., Foletto, T., Castelan, E. and Moreno, U. (2010). Realimentação de Estados com Ganhos Variantes para uma Classe de Sistemas de Controle via Rede, Proceedings of the XVIII Congresso Brasileiro de Automática pp. 4669–4676. Santos, T., Moreno, U., Montez, C. and Perez, D. (2007). Using the pole placement approach in a co-design procedure for a networked control system, Proceedings of the 3rd IFAC Symposium on System, Structure and Control. Åström, K. and Wittenmark, B. (1997). ComputerControlled Systems: Theory and Design, Prentice Hall. Sturm, J. (1999). Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones, Optimization Methods and Software 11-12: 625–653. Tang, X. and Yu, J. (2007). Networked control system: survey and directions, Bio-Inspired Computational Intelligence and Applications pp. 473–481. Wu, Z., Su, H. and Chu, J. (2009). Robust stability for uncertain discrete singular systems with time-varying delays, Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering 223(5): 713–720. Yue, D., Han, Q. and Peng, C. (2004). State feedback controller design of networked control systems, Control Applications, 2004. Proceedings of the 2004 IEEE International Conference on, Vol. 1. Zhang, W. and Yu, L. (2008). New approach to stabilisation of networked control systems with timevarying delays, Control Theory & Applications, IET 2(12): 1094–1104. 521
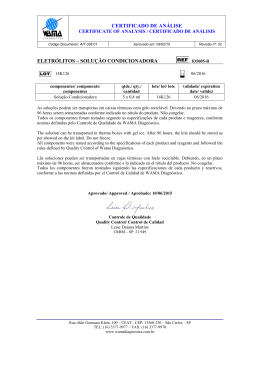
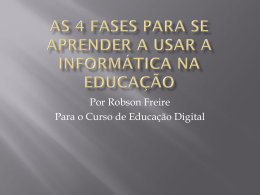
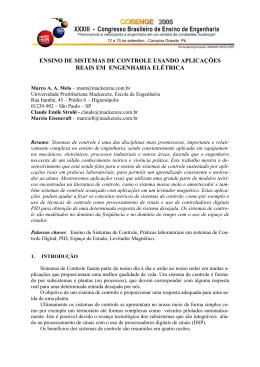
Baixar